Область техники
Изобретение относится к способу и устройству для пуска электродвигателя.
Уровень техники
Бесщеточные электродвигатели постоянного тока, называемые также двигателями BLDC (с английского: "brushless direct current motor"), применяются, например, для привода компрессора в холодильнике. Такие электродвигатели содержат ветви обмотки и ротор с постоянным магнитом. Когда через ветви обмотки протекает ток, обмотки генерируют магнитное поле, которое прилагает крутящий момент к постоянному магниту и, тем самым, приводит в движение ротор. Путем попеременной активизации различных ветвей обмоток в двигателе создается вращающееся магнитное поле, которое, тем самым, приводит в движение ротор.
Некоторые приводы, например приводы компрессоров в холодильниках, имеют неравномерный профиль нагрузки, что означает, что приводящаяся от них нагрузка варьируется на протяжении полного оборота двигателя, причем максимальный крутящий момент, который должен развиваться двигателем, может во много раз превышать средний крутящий момент. Поэтому при пуске двигателя выгодно сначала перевести ротор в четко определенное положение, чтобы ротор прошел максимально возможный угол поворота и ускорился до максимально большого крутящего момента еще до возникновения максимального крутящего момента.
Возможность позиционирования ротора обусловлена тем, что на ветви обмотки двигателя подается определенный постоянный ток за счет активизации с заданным положением переключателя, то есть за счет настройки определенного электрического положения. Определенный ток создает определенное магнитное поле, на которое ориентируется постоянный магнит ротора. При этом разумеется, имеет место проблема, связанная с тем, что такой способ не позволяет определить точное механическое положение в двигателях более чем с одной парой полюсов. Так, в 6-полюсном двигателе, который часто применяется в компрессорах холодильных аппаратов, одному определенному электрическому положению соответствуют три различных механических положения, смещенные друг относительно друга на 120°. При этом, в зависимости от исходного положения, ротор занимает механическое положение, ближайшее к этому исходному положению. Это приводит к тому, что оптимальный запуск двигателя возможен только в одном из трех возможных механических положений, а в двух других механических положениях угол поворота до максимальной нагрузки будет меньше. В последнем варианте может случиться так, что двигатель при достижении максимальной нагрузки еще не разовьет крутящий момент, необходимый для ее преодоления, и затормозится, в результате чего пуск двигателя не будет успешным. Может потребоваться несколько попыток для запуска двигателя.
Возможен вариант с дополнительными датчиками, поставляющими информацию о точном положении ротора. Разумеется, этот вариант связан с дополнительными затратами на эти датчики.
В публикации DE69803885T2 описывается управляющее устройство для электродвигателей, в котором управляющий блок задает частоту и длительность переключения для переключающих устройств таким образом, чтобы значение напряжения, фактически приложенного к обмоткам, равнялось значению, которое независимо от переключающего состояния переключающих устройств соответствует частоте вращения и крутящему моменту, требующимся электродвигателю.
В публикации DE4009258C2 описывается способ и электронная схема регулирования для пуска бесщеточного электродвигателя постоянного тока.
В публикации DE60025909T2 описывается система пуска электродвигателя, которая может быть расположена внутри корпуса герметичного холодильного компрессора.
В публикации DE10215428A1 описывается способ определения положения ротора синхронного электродвигателя. При этом сначала ротор синхронного электродвигателя блокируется тормозом или высоким статическим трением. Затем при наложенном тормозе к синхронному электродвигателю прикладывается несколько векторов тока с различным угловым положением. Отклонение ротора можно объяснить эластичностью вала, на который воздействует ротор и тормоз, а в случае очень малых отклонений в качестве пружинного усилия можно рассматривать удерживающее усилие тормоза.
В публикации US4,565,957 описывается способ и система для пуска скоммутированного тиристорного инвертора. При этом ротор путем создания магнитных полей поворачивается в первое положение, затем поворачивается во второе положение, причем ротор может полностью останавливаться в каждом из этих положений. Согласно US4,565,957 двигатель может приводить компрессор большой емкости, предназначенный для промышленных кондиционеров.
Раскрытие изобретения
Таким образом, задачей изобретения является разработка способа и устройства для запуска электродвигателя с ветвями обмотки и ротором, которые обеспечат надежный запуск электродвигателя даже в отсутствие сведений о начальном положении ротора.
Согласно изобретению способ запуска электродвигателя, в частности бесщеточного элетродвигателя постоянного тока, содержащего ветви обмотки и ротор, включает следующие этапы: приведение ротора во вращение в первом направлении при помощи первого крутящего момента, причем максимальное значение первого крутящего момента не превышает максимальное значение крутящего момента, противодействующего вращению ротора, так что ротор затормаживается в первом положении покоя; приведение ротора, находящегося в первом положении покоя, во вращение во втором направлении, противоположном первому направлению вращения, до затормаживания ротора в заданном втором положении покоя; запуск вращения ротора, находящегося во втором положении покоя, в первом направлении вращения.
Такой способ позволяет перевести ротор, даже не зная его исходного положения, сначала в определенное положение, и впоследствии разогнать его из этого положения с оптимальными пусковыми характеристиками.
В частности, электродвигатель может представлять собой бесщеточный электродвигатель постоянного тока, содержащий ветви обмотки, причем ротор приводится во вращение за счет нагрузки ветвей обмотки токами возбуждения.
Ротор может приводиться во вращение сигналом широтно-импульсной модуляции, в частности, сигналом тока широтно-импульсной модуляции. При этом коэффициент заполнения и/или такт сигнала широтно-импульсной модуляции может быть выбран таким образом, чтобы максимальное значение первого крутящего момента не превышало максимальное значение противодействующего крутящего момента.
Перед достижением первого и/или второго положения покоя электродвигатель может работать в шаговом режиме. Таким образом, электродвигатель может контролируемо переходить в первое и/или второе положение покоя.
Второе положение покоя может располагаться под углом от 0° до 90°, предпочтительно, от 30° до 60°, еще предпочтительнее, от 35° до 45° за положением, соответствующим максимальному противодействующему крутящему моменту. Таким образом, при пуске можно обеспечить прохождение большой дуги окружности до встречи с максимальным противодействующим крутящим моментом.
При пуске двигателя из второго положения покоя может развиваться растущий второй крутящий момент. Таким образом, крутящий момент может последовательно увеличиваться до значения, достаточно высокого для преодоления максимального противодействующего крутящего момента. При этом второй крутящий момент может увеличиваться поэтапно и линейно. В альтернативном варианте шаг увеличения второго крутящего момента может возрастать с течением времени. Таким образом, характеристика созданного крутящего момента может быть приведена в соответствие с характеристикой профиля нагрузки или противодействующего крутящего момента.
Крутящий момент может следовать линейной характеристике пуска, в конце которой происходит переключение в режим автоматической коммутации, причем в конце линейной характеристики пуска противодействующий крутящий момент может составлять менее половины, предпочтительно, менее трети от максимального противодействующего крутящего момента. Таким образом, можно своевременно, до достижения максимального противодействующего крутящего момента, переключиться в режим автоматической коммутации.
Электродвигатель может сначала работать в токовом режиме, а по достижении определенной частоты вращения - в режиме напряжения. Если двигатель на этапе пуска работает в токовом режиме, то можно обеспечить идеальную настройку крутящего момента во время фазы пуска. После разгона, то есть, например, при достижении определенной частоты вращения, двигатель может переключаться в режим напряжения, чтобы использовать свойство синхронного электродвигателя, позволяющее регулировать при работе колебания крутящего момента посредством угла выбега ротора.
Перед приведением ротора во вращение при помощи первого крутящего момента ротор может быть заторможен в положении покоя на определенный период. Такой тайм-аут позволяет дождаться нормализации степени сжатия в компрессоре.
Электродвигатель может использоваться, например, в качестве привода компрессора, в частности, в холодильном аппарате, причем максимальный противодействующий крутящий момент соответствует противодействующему крутящему моменту в точке компрессии. Под холодильным аппаратом понимается, в частности, бытовой холодильный аппарат, то есть холодильный аппарат для бытовых или гастрономических нужд, в частности, предназначенный для хранения при определенной температуре продуктов питания и/или напитков в количестве, характерном для домашнего хозяйства. Таким холодильным аппаратом может быть холодильник, морозильник, холодильно-морозильный аппарат, морозильный ларь или винный погребок.
Возможен вариант, в котором электродвигатель активизируется посредством управляющих сигналов, причем во время первой попытки запуска управляющие сигналы определяются на основании параметров состояния, имеющего место при первом максимальном противодействующем крутящем моменте, а во время второй попытки запуска, следующей за первой попыткой запуска, управляющие сигналы определяются на основании параметров состояния, имеющего место при втором максимальном противодействующем крутящем моменте, причем второй максимальный противодействующий крутящий момент превышает первый максимальный противодействующий крутящий момент. Таким образом, во время первой попытки запуска могут использоваться параметры для отсутствия давления, а во время второй попытки запуска - параметры для пуска против давления.
Способ запуска электродвигателя с ротором включает следующие этапы: создание крутящего момента, приводящего ротор во вращение в первом направлении, в целях запуска электродвигателя; в случае, если запуск электродвигателя окажется безуспешным, выполнение вышеописанного способа.
Таким образом, можно реализовать адаптивный способ запуска.
Кроме того, предлагается устройство для запуска электродвигателя, рассчитанное на осуществление вышеописанного способа.
Краткое описание чертежей
Прочие признаки и преимущества изобретения следуют из приведенного ниже описания вариантов исполнения с учетом прилагаемых фигур, на которых:
Фигура 1 - эквивалентная схема электродвигателя, который выполнен в виде бесщеточного электродвигателя постоянного тока (BLDC).
Фигура 2 - график, на котором схематично показана характеристика сигнала в зависимости от тока двигателя и встречной ЭДС, а также переключающие положения переключателя.
Фигура 3 - диаграмма, которая иллюстрирует эксплуатацию в токовом режиме и эксплуатацию в режиме напряжения, причем токовый режим представлен в левой половине диаграммы, а режим напряжения - в правой половине диаграммы.
Фигура 4 - различные профили нагрузки электродвигателя компрессора.
Фигура 5 - три этапа или фазы способа, описываемого изобретением.
Осуществление изобретения
Если не указано иное, одинаковые обозначения на фигурах относятся к одинаковым элементам или элементам, обладающим одинаковой функциональностью.
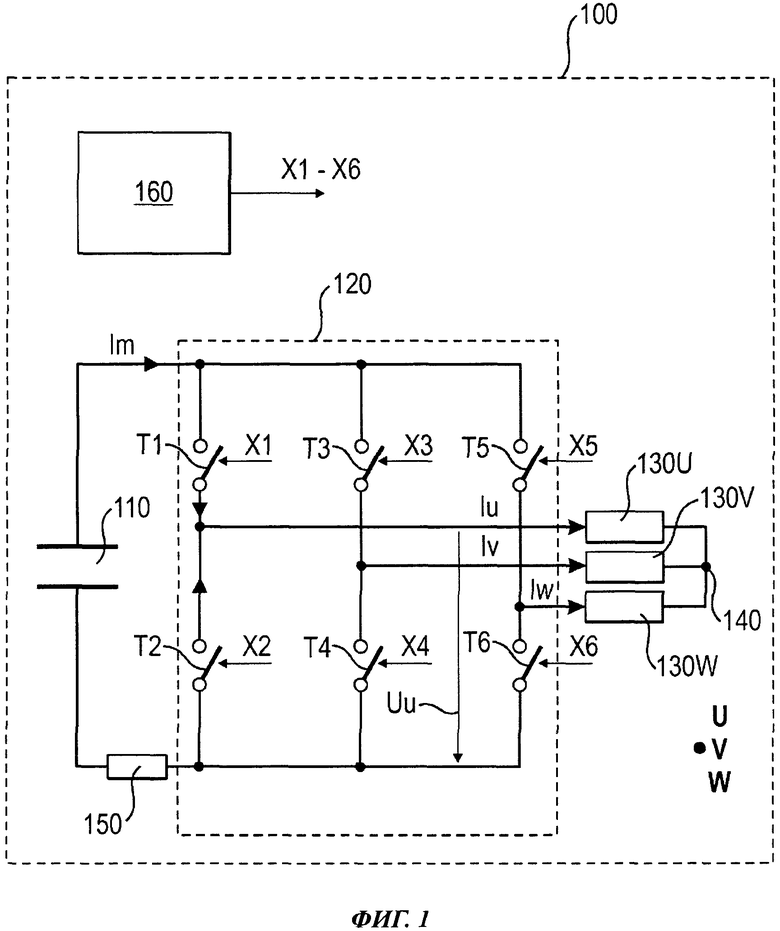
На фигуре 1 представлена эквивалентная схема электродвигателя 100, который выполнен в виде бесщеточного электродвигателя постоянного тока (BLDC) и может использоваться, например, в качестве привода компрессора в холодильнике. Электродвигатель 100 содержит источник 110 питания, мост 120 инвертора, три обмотки двигателя или ветви 130U, 130V, 130W обмотки и систему 160 управления двигателем.
Источник 110 питания выдает напряжение промежуточного звена между потенциалом и массой промежуточного звена. Мост 120 инвертора содержит шесть переключателей Т1-Т6, которые расположены по схеме моста В6 и питают током ветви 130U, 130V и 130W обмотки. Точнее говоря, выключатели включены попарно (Т1-Т2, Т3-Т4, Т5-Т6) и последовательно между потенциалом и массой промежуточного звена. Каждый из узлов, расположенных между переключателями Т1-Т2, Т3-Т4, Т5-Т6, соединен с одной стороной ветвей 130U, 130V, 130W обмотки. Другая сторона ветвей 130U, 130V, 130W обмотки соединена с нулевой точкой 140. Кроме того, между мостом 120 инвертора и источником 110 питания со стороны массы промежуточного звена предусмотрено сопротивление 150.
Каждый из переключателей Т1-Т6 может содержать, например, мощный транзистор и включенный параллельно ему безынерционный диод. Переключатели Т1-Т6 активизируются управляющими сигналами Х1-Х6, которые подаются системой 160 управления двигателя. При этом система 160 управления двигателя соответствует устройству для запуска электродвигателя. При этом ветви 130 обмотки активизируются таким образом, чтобы создавалось вращающееся магнитное поле, в котором вращается ротор, содержащий постоянный магнит. Таким образом, электродвигатель 100 представляет собой синхронный электродвигатель с постоянным магнитом и тремя обмотками, который питается трехфазным напряжением посредством моста 120 инвертора В6.
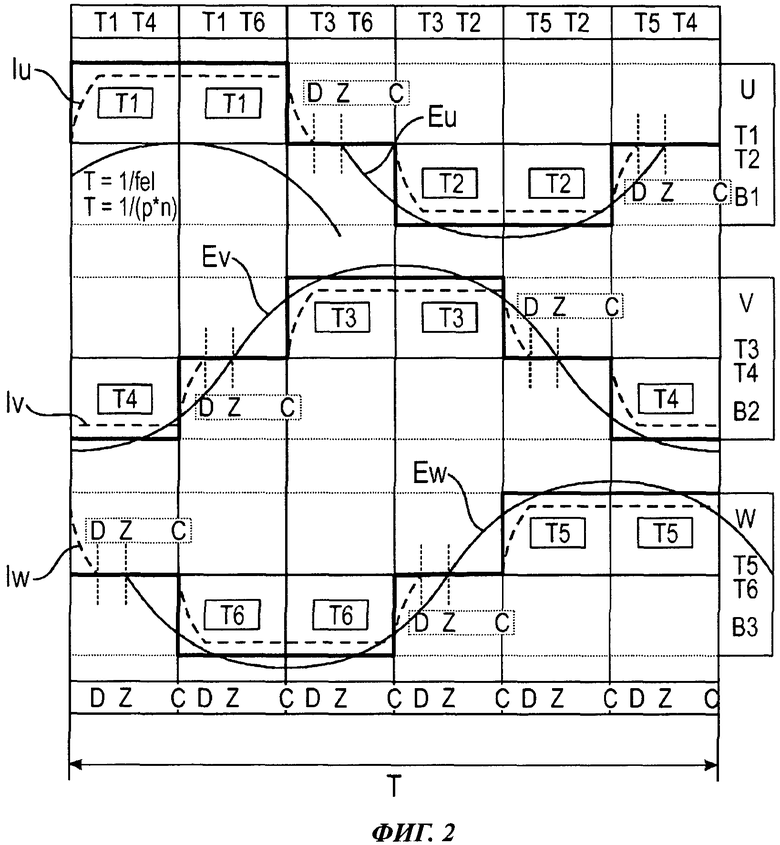
Фигура 2 представляет собой диаграмму, на которой схематично показана характеристика сигнала в зависимости от тока двигателя и встречной ЭДС, а также переключающие положения переключателей Т1-Т6. При этом жирные сплошные линии обозначают переключающие положения переключателей Т1-Т6, пунктирные линии обозначают токи lu, lv, lw обмотки или возбуждения, протекающие через ветви 130U, 130V, 130W обмотки, а тонкие сплошные линии - встречные ЭДС Eu, Ev, Ew, возникающие в ветвях 130U, 130V, 130W обмотки. При этом на диаграмме (фигура 2) показана характеристика за электрический период Т, который, в свою очередь, делится на шесть малых периодов продолжительностью Т/6, каждый из которых соответствует дуге 60°. Каждая из трех ветвей 130U, 130V, 130W обмотки активизируется со смещением на 120°. Во время первого малого периода переключатели Т1 и Т4 включены (проводят электрический ток), а все прочие выключатели выключены (не проводят электрический ток), в результате чего ток Im двигателя протекает через ветвь 130U обмотки, нулевую точку 140 и ветвь 130V обмотки к массе промежуточного звена. В конце этого первого малого периода происходит коммутация с ветви 130V обмотки на ветвь 130W обмотки, осуществляемая путем выключения выключателя Т4 и включения выключателя Т6. Во время этого второго малого периода переключатели Т1 и Т6 включены, в результате чего ток Im двигателя протекает через ветвь 130U обмотки, нулевую точку 140 и ветвь 130W обмотки к массе промежуточного звена. В конце этого второго малого периода происходит вторая коммутация с ветви 130U обмотки на ветвь 130V обмотки, осуществляемая путем выключения выключателя Т1 и включения выключателя Т3. Во время этого третьего малого периода переключатели Т3 и Т6 включены, в результате чего ток Im двигателя протекает через ветвь 130V обмотки, нулевую точку 140 и ветвь 130W обмотки к массе промежуточного звена. Согласно этому примеру, две из ветвей 130 обмотки постоянно находятся под напряжением, а третья ветвь 130 обмотки - обесточена. При этом каждая отдельная ветвь 130 обмотки поочередно подключается на протяжении 2×60°=120° к потенциалу промежуточного звена, затем обесточивается на протяжении 60°, затем подключается на протяжении 2×60°=120° к массе промежуточного звена, после чего снова обесточивается на протяжении 60°.
Таким образом, в каждом электрическом периоде Т активизируется шесть переключающих состояний, причем электрический период Т складывается из
Т=1/(p×n),
где n - частота вращения, а p - число пар полюсов двигателя.
Система 160 управления двигателя настраивает моменты коммутации таким образом, чтобы перемещение ротора и длительности фаз прилагаемых напряжений были синхронными и синфазными. При этом вывод о положении ротора делается на основании встречной ЭДС двигателя, то есть напряжений, индуцированных магнитным полем ротора в ветвях 130 обмотки статора. Характеристичной величиной для этого является прохождение встречной ЭДС через нуль, что обозначено на фигуре 2 как Z. Коммутация может быть запущена, например, с заданным тайм-аутом после прохождения через нуль, причем длительность этого тайм-аута может зависеть от частоты вращения и/или нагрузки. На фигуре 2 каждый момент коммутации обозначен буквой С. Кроме того, на фигуре 2 видно, что ток обмотки имеет инерцию, обусловленную индуктивностью катушки. Так, ток lu, протекающий через ветвь 130U обмотки, при включении выключателя Т1 возрастает на протяжении определенного периода увеличения, и при включении выключателя Т1 ток lu падает до нуля в течение периода, соответствующего периоду размагничивания ветви 130U обмотки. Ток обмотки уменьшается до нуля только в момент D. Таким образом, коммутация характеризуется тремя событиями D, Z и С, то есть моментом D размагничивания ветви, по которой до этого протекал ток, моментом Z прохождения через нуль и моментом С запуска коммутации по истечении заданного времени.
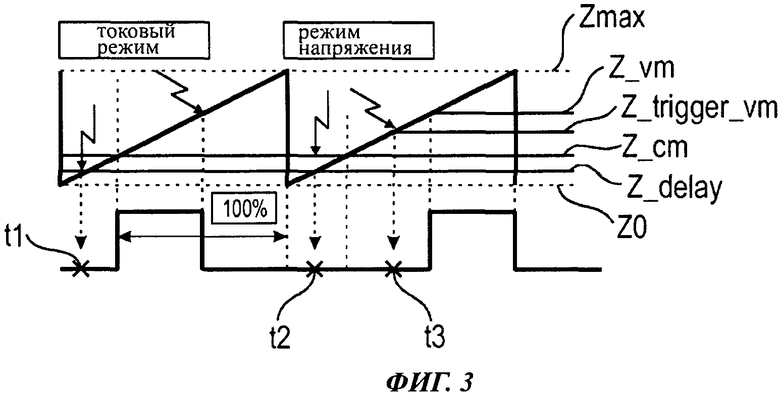
Регулирование подачи энергии на обмотки двигателя осуществляется посредством широтно-импульсной модуляции (ШИМ). При этом в качестве меры относительной продолжительности включения напряжения на клеммах с ШИМ используется "коэффициент заполнения". Коэффициент заполнения представляет собой отношение между продолжительностью включения и продолжительностью такта и имеет значение от 0% до 100%. ШИМ для активизации электродвигателя 100 может осуществляться в токовом режиме или в режиме напряжения. На фигуре 3 представлена диаграмма, иллюстрирующая оба способа, причем токовый режим показан в левой половине диаграммы, а режим напряжения - в правой половине диаграммы.
В обоих способах, например, счетчик, имеющийся в системе 160 управления двигателя и не показанный в деталях, генерирует опорные или счетные значения, которые прирастают от исходного значения Z0 до максимального значения Zmax, в результате чего с течением времени образуется треугольная модель или треугольная характеристика.
В токовом режиме ток двигателя регулируется схемой сравнения в соответствии с двухпозиционным методом. Когда показания счетчика достигают сравнительной величины Z_cm, происходит включение напряжения с широтно-импульсной модуляцией. В токовом режиме коэффициент заполнения определяется моментом отключения импульса ШИМ, осуществленного схемой управления. Точнее говоря, на токовый компаратор может поступать, например, заданный ток и фактический ток. Когда фактический ток становится равным заданному току, происходит выключение напряжения с широтно-импульсной модуляцией.
В режиме напряжения, напротив, система 160 управления двигателя рассчитывает заданное напряжение и запоминает относительную продолжительность включения ШИМ. Это может происходить, например, за счет того, что система 160 управления двигателя определяет сравнительное значение Z_vm и сравнивает его с текущим показанием счетчика, причем напряжение ШИМ включается тогда, когда показание Z счетчика больше либо равно значению Z_vm и меньше либо равно значению Zmax. Показания Z_delay и Z_trigger_vm счетчика указывают на возможные моменты t1, t2, t3 измерения встречной ЭДС.
Иными словами, в токовом режиме запоминается крутящий момент, а в режиме напряжения - частота вращения. Режим работы выбирается в зависимости от профиля нагрузки и требований к электродвигателю 100. Соответствующий режим работы выбирается в зависимости от того, требуется ли высокая стабильность частоты вращения, низкая шумность, низкая вибрация или высокая энергетическая эффективность. При этом режим работы может задаваться при включении электродвигателя 100 или переключаться в зависимости от условий эксплуатации. Также возможен смешанный режим работы. Выгоден вариант, в котором двигатель на этапе пуска эксплуатируется в токовом режиме, чтобы обеспечить идеальную регулировку крутящего момента в начальной фазе. После разгона, то есть, например, при достижении определенной частоты вращения, двигатель может быть переключен в режим напряжения, чтобы использовать свойство синхронного электродвигателя, позволяющее регулировать при работе колебания крутящего момента посредством угла выбега ротора.
Электродвигатель 100 может использоваться, например, в качестве привода компрессора в холодильнике. Такой компрессор сжимает хладагент при помощи поршня. При этом хладагент поступает через впускной клапан, расположенный в пластине клапанов, в поршневую камеру, сжимается приводимым от электродвигателя поршнем и выводится через выпускной клапан, расположенный в пластине клапанов, из поршневой камеры. При каждом обороте поршень достигает верхней мертвой точки и, тем самым, точки максимальной компрессии, в которой на двигатель воздействует максимальный противодействующий крутящий момент. Таким образом, профиль нагрузки, приводящейся от двигателя, очень динамичен, причем максимальный крутящий момент многократно, то есть в пять раз превышает средний крутящий момент.
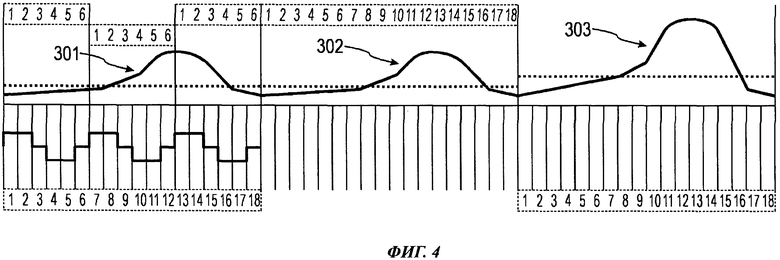
На фигуре 4 представлены различные профили 301, 302, 303 нагрузки компрессора, относящиеся к подобному электродвигателю 100. Как показано на фигуре 4, один оборот 6-полюсного электродвигателя 100 соответствует трем электрическим периодам Т, то есть один электрический период Т приходится на одну пару полюсов. Каждому из этих электрических периодов Т соответствует шесть электрических положений или переключающих положений, как показано для профиля 301 нагрузки. Таким образом, всего имеется 18 малых электрических периодов (см. профиль 302 нагрузки). В нижней половине фигуры 4 схематично показан характеристичный управляющий сигнал бесщеточного электродвигателя постоянного тока для одной ветви обмотки. Противодавление, обусловленное хладагентом, зависит от режима работы холодильного контура. В зависимости от того, какая часть хладагента перешла в жидкую форму, а какая часть еще остается в газообразной форме, увеличивается или уменьшается максимальный противодействующий крутящий момент. Если компрессор вводится в эксплуатацию после длительного простоя, то давление в поршневой камере уменьшается, в результате чего максимальный противодействующий крутящий момент снижается. Эта ситуация соответствует профилям 301 и 302 нагрузки. Если компрессор, напротив, включается после кратковременной нагрузки, то ему приходится преодолевать повышенное остаточное давление. Это соответствует профилю 303 нагрузки.
Как уже говорилось, ротор бесщеточного электродвигателя 100 постоянного тока может позиционироваться за счет определенного положения выключателя. Однако поскольку бесщеточный электродвигатель 100 постоянного тока содержит три пары полюсов, каждому из шести возможных электрических положений 1-6 соответствует ровно три положения ротора. Занимаемое ротором положение зависит от того, в каком положении ротор был остановлен после предыдущего вращения. Это положение неизвестно. Если ротор сначала находится в положении, которое недостаточно удалено от максимальной нагрузки, например в положении 2 второго электрического периода в профиле 301 нагрузки, то крутящий момент, развиваемый при пуске, может оказаться недостаточен для преодоления противодействующего крутящего момента, действующего на двигатель, и запуск окажется неудачным.
Согласно описываемому ниже способу, ротор переводится в точно определенное положение до осуществления запуска в направлении вращения. Иными словами, сначала устраняется неопределенность положения ротора. Основная идея способа заключается в том, что ротор сначала проворачивается малым крутящим моментом в первом направлении вращения таким образом, чтобы он затормозился в первом положении покоя перед максимальным противодействующим крутящим моментом. Затем ротор проворачивается на определенный угол в противоположном направлении до второго положения покоя, в котором и останавливается. Затем двигатель разгоняется согласно линейной характеристике пуска в первом направлении вращения. Отдельные этапы способа подробно рассматриваются ниже.
Фигура 5 иллюстрирует три этапа или фазы 401, 402, 403 этого способа и схематично показывает токи 410, 420, 430 возбуждения, протекающие на отдельных этапах через ветви 130 обмотки. На первом этапе 401 ротор приводится во вращение в первом направлении, которое совпадает с последним, окончательным направлением вращения ротора. При этом в ветви обмотки подается ток возбуждения, создающий первый крутящий момент, который меньше максимального крутящего момента, противодействующего вращению ротора. При этом под максимальным противодействующим крутящим моментом понимается крутящий момент при максимальной нагрузке во время полного оборота двигателя, то есть момент в точке компрессии. Вращение ротора на этом этапе может быть дискретным. Это означает, что ротор при каждой коммутации перемещается в направлении вращения, а затем, когда постоянный магнит ротора выровняется в изменившемся магнитном поле, останавливается до осуществления следующей коммутации. При этом каждая коммутация соответствует одному шагу или одному малому электрическому периоду. Отдельные шаги 405 называются также "шагами с фиксацией". Для создания магнитного поля через две из трех ветвей 130U, 130V, 130W обмотки пропускается электрический ток. При этом активизация осуществляется широтно-импульсной модуляцией (ШИМ), причем каждый из выключателей Т1-Т6 включается во время такта ШИМ на время, соответствующее коэффициенту заполнения. При этом созданный первый крутящий момент не обязательно будет постоянным с течением времени. В частности, в шаговом режиме крутящий момент может следовать определенному профилю. Важно лишь, чтобы максимальное значение первого крутящего момента было меньше максимального противодействующего крутящего момента.
Чтобы крутящий момент, развиваемый на каждом шаге 405 этой первой фазы 401, был меньше максимального противодействующего крутящего момента, можно соответствующим образом настроить коэффициент заполнения широтно-импульсной модуляции и продолжительность отдельных шагов 405. Параметры активизации, соответствующие максимальному противодействующему крутящему моменту на холостом ходу, то есть при минимальном давлении в поршневой камере, могут быть сохранены в памяти системы 160 управления двигателя и использоваться во время данной первой фазы 401, что позволяет обеспечить достаточно низкий крутящий момент. Поскольку ротор не может преодолеть максимальный противодействующий крутящий момент, он затормаживается в первом положении покоя перед точкой компрессии. При этом данное первое положение покоя располагается на расстоянии нескольких (например, от двух до четырех) шагов перед точкой компрессии. Таким образом, будет достаточно, если количество шагов в этой фазе 401 будет соответствовать количеству электрических малых периодов на оборот, так как после этого ротор будет останавливаться в одном и том же положении независимо от исходного положения. Тем не менее, разумеется, не будет вреда в том, чтобы выполнить большее количество шагов 405 с фиксацией. Кроме того, будет также достаточным меньшее количество шагов 405 с фиксацией. Предположим, что исходное положение ротора находится, по меньшей мере, в двух шагах за точкой компрессии, а положение останова или затормаживания - по меньшей мере, за два шага до точки компрессии. В этом случае в предлагаемом примере будет достаточно выполнить 14 шагов 405 с фиксацией.
Во время следующей фазы 402 способа ротор, находящийся в первом положении покоя, перемещается на определенное количество шагов во втором направлении вращения, противоположном первому направлению вращения. Данная фаза 402 предназначена для перевода ротора в определенное положение покоя, которое максимально удалено в направлении вращения от точки компрессии. Это позволяет предусмотреть на последующем этапе максимально длинный путь линейного ускорения при пуске. При этом позиционирование ротора в направлении, противоположном последнему направлению вращения, может снова осуществляться дискретно, причем не имеет значения, будут ли развиваемые при этом крутящие моменты выше или ниже максимального противодействующего крутящего момента. Предположим, что в самом неблагоприятном случае первое положение покоя находится в конце шагового режима фазы 401 в 4 шагах перед точкой компрессии. В этом случае ротор может провернуться на 12 шагов против направления вращения. При этом он остановится во втором положении покоя в двух шагах за точкой компрессии. Следует учитывать, что на фигуре 5 простоты ради показано только девять шагов. При этом данный шаговый режим может быть начат в переключающем положении, располагающемся всего в двух или трех шагах за точкой компрессии. Эти шаги будут соответствовать электрическим положениям, которым ротору не удалось последовать по причине высокого противодействующего крутящего момента. Таким образом, после этих шагов ротор фиксируется в первом положении покоя и "увлекается" дальше только во время последующих шагов.
Также не имеет значения неопределенность первого положения покоя, в котором ротор останавливается в конце фазы 401, так как после приведения ротора в движение становится известно его точное положение. Таким образом, в конце фазы 402 ротор находится в точно определенном втором положении покоя.
Во время третьей фазы 403 способа ротор, находящийся во втором положении покоя, приводится во вращение в первом направлении, причем развивается крутящий момент, превышающий максимальный противодействующий крутящий момент. Третья фаза 403, в свою очередь, делится на три этапа 431, 432, 433.
На первом этапе 431 на две из трех ветвей 130 обмотки подается ток возбуждения, причем ток возбуждения нарастает в соответствии с заданной линейной характеристикой увеличения. Так как крутящий момент, по существу, пропорционален току, крутящий момент также увеличивается соответствующим образом, начиная от нуля. Тем самым гарантируется, что не произойдет колебаний ротора, обусловленных внезапно приложенным крутящим моментом. Какая из двух ветвей обмотки будет активизирована, зависит от конечного положения ротора во время фазы 402, причем ветви обмотки активизируются таким образом, чтобы ротор по сравнению с фазой 402 вращался в противоположном направлении, то есть в окончательном направлении вращения.
На втором этапе 432 активизация ветвей обмотки происходит согласно профилю активизации, который соответствует заданной линейной характеристике пуска. При этом такие параметры, как заданный ток, моменты коммутации и т.п., являются заданными и могут быть сохранены, например, в памяти системы 160 управления двигателя. В частности, моменты коммутации в этом случае еще не ориентируются на встречную ЭДС, а заданы заранее.
На третьем этапе 433 коммутация происходит в зависимости от рассчитанной встречной ЭДС, например, вышеописанным образом каждый раз по истечении определенного периода после распознавания прохождения встречной ЭДС через нуль. Этот режим называется также "автоматической коммутацией" и соответствует отображению на фигуре 2.
Количество шагов линейной характеристики пуска во время второго этапа 432 перед переключением в режим автоматической коммутации должно быть выбрано таким образом, чтобы автоматическая коммутация достигалась уже за несколько шагов, например, за два-семь шагов до точки компрессии. Если, например, конечное положение во второй фазе 402 находится за шестнадцать шагов до точки компрессии, а противодействующий крутящий момент после двенадцатого шага круто растет, то будет идеальной линейная характеристика пуска с десятью шагами до переключения в режим автоматической коммутации.
В одном из вариантов исполнения крутящий момент, развиваемый согласно линейной характеристике пуска во время второго этапа 432 третьей фазы 403, поэтапно и линейно увеличивается. В данном случае это означает, что разность между развиваемыми крутящими моментами или токами возбуждения двух следующих друг за другом переключающих состояний, по существу, постоянна. При этом созданный крутящий момент, разумеется, будет всегда больше либо равен противодействующему крутящему моменту, воздействующему на двигатель. Противодействующий момент складывается из сил инерции, сил трения и сил компрессии. В альтернативном варианте исполнения крутящий момент, развиваемый согласно линейной характеристике пуска, может увеличиваться нелинейно. В частности, он может быть согласован с ожидаемым противодействующим крутящим моментом, в результате чего двигатель запускается плавно, а развиваемый крутящий момент впоследствии прогрессивно растет в соответствии с крутым подъемом противодействующего крутящего момента. Это может быть реализовано при помощи соответствующих, возможно, сохраненных параметров активизации, например коэффициента заполнения.
В конце второго этапа 432 выполняется переключение на автоматическую коммутацию. Крутящий момент, развиваемый во время третьего этапа 433, превышает противодействующий крутящий момент в точке компрессии, в результате чего ротор на этот раз не останавливается, а проходит точку компрессии и разгоняется.
Как уже говорилось, профиль нагрузки зависит, в том числе, от времени, в течение которого компрессор не включался. То есть двигатель компрессора при пуске должен работать по различным профилям нагрузки, которые не всегда известны. Это учитывается при адаптивном запуске двигателя, описываемом ниже.
При адаптивном запуске выполняется несколько попыток запуска различного рода. Первый тип запуска соответствует описанному выше способу запуска, включающему три описанных фазы. Второй тип запуска представляет собой простой запуск бесщеточного электродвигателя постоянного тока, который соответствует, например, вышеописанной третьей фазе 403 без фаз 401 и 402. Третий тип запуска представляет собой повторный запуск после заданного тайм-аута, который должен гарантировать, что степень сжатия в поршневой камере снизилась, а максимальный противодействующий крутящий момент уменьшился.
Четвертый тип запуска представляет собой запуск с измененным набором параметров.
Названные типы запуска могут комбинироваться друг с другом в произвольном порядке. Например, можно сначала выполнить простой запуск бесщеточного электродвигателя постоянного тока, а если он окажется безуспешным, выполнить вышеописанный способ запуска, включающий три описанных фазы. Безуспешность попытки запуска можно определить, например, по тому, что не удается распознать прохождение встречной ЭДС через нуль, то есть встречная ЭДС не проходит через нуль даже по истечении заданного относительно длительного времени.
Приведем пример несколько расширенного адаптивного способа: на первом этапе выжидается заданное время. На втором этапе происходит простой запуск бесщеточного электродвигателя постоянного тока с набором параметров для пуска без давления, то есть набором параметров, основанным на профиле нагрузки, ожидающемся для низкого противодавления. Если этот запуск не удается, выполняется полная последовательность запуска с фазами 401, 402, 403, причем набор параметров по-прежнему рассчитан на запуск без давления. Если и эта попытка проваливается, сначала осуществляется запуск бесщеточного электродвигателя постоянного тока с измененными параметрами, а затем - полная последовательность запуска с измененными параметрами. Эти измененные параметры основываются на профиле нагрузки, ожидающемся для высокого противодавления. Если и эти попытки оказываются безуспешными, можно повторно выждать тайм-аут и повторить последовательность сначала, например, с еще раз измененными параметрами или увеличенным тайм-аутом.
Разумеется, можно также сначала выполнить ряд запусков бесщеточного электродвигателя постоянного тока с различными наборами параметров, а затем - ряд последовательностей запуска (с фазами 401, 402, 403) с различными наборами параметров, причем каждой попытке запуска может предшествовать тайм-аут.
Приведем примеры возможных параметров, которые могут различаться в различных последовательностях запуска: исходное положение ротора в начале запуска бесщеточного электродвигателя постоянного тока, продолжительность подачи тока в исходном положении, коэффициент заполнения и изменение коэффициента заполнения во время фазы выравнивания ротора, то есть на этапе 431, линейная характеристика пуска на этапе 432, в частности моменты отдельных коммутаций на этом этапе, форма данной линейной характеристики пуска, количество шагов до переключения на автоматическую коммутацию или до измерения встречной ЭДС, количество распознанных прохождений ЭДС через нуль до переключения на автоматическую коммутацию, режим работы и коэффициент заполнения в линейной характеристике или изменение коэффициента заполнения в зависимости от частоты вращения, начальные значения в точке переключения на момент размагничивания и время первой коммутации. Также таким параметром может быть время до активизации регулятора частоты вращения, время до возможного переключения режима работы и время до использования факторов, зависящих от частоты вращения, а также все расчетные параметры в ходе эксплуатации, предназначенные для определения момента коммутации.
Подобный адаптивный запуск позволяет гарантированно запустить двигатель даже в неизвестном нагрузочном режиме.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
Z0
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2498491C2 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
| ЭЛЕКТРИЧЕСКИЙ ИНСТРУМЕНТ | 2007 |
|
RU2440233C2 |
| ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СТАРТОВЫМИ ПОЛЮСАМИ | 1996 |
|
RU2103786C1 |
| МОБИЛЬНОЕ ОБВЯЗОЧНОЕ УСТРОЙСТВО | 2009 |
|
RU2471689C2 |
| Способ запуска газотурбинного двигателя | 2019 |
|
RU2717477C1 |
| Способ запуска газотурбинного двигателя | 2018 |
|
RU2680287C1 |
| ОБВЯЗОЧНОЕ УСТРОЙСТВО С ПЕРЕДАТОЧНЫМ МЕХАНИЗМОМ | 2009 |
|
RU2462403C2 |
| СПОСОБ КОНТРОЛЯ ЗАПУСКА МАСЛЯНОГО НАСОСА | 2020 |
|
RU2773411C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЯКОРЯ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) | 1991 |
|
RU2111598C1 |
Изобретение относится к области электротехники и может быть использовано для запуска электродвигателя. Техническим результатом является повышение надежности запуска электродвигателя в отсутствие сведений о начальном положениии ротора. Способ запуска электродвигателя (100), содержащего ротор, включает следующие этапы: приведение ротора во вращение в первом направлении при помощи первого крутящего момента, причем максимальное значение первого крутящего момента не превышает максимальное значение крутящего момента, противодействующего вращению ротора, так что ротор затормаживается в первом положении покоя; приведение ротора, находящегося в первом положении покоя, во вращение во втором направлении, противоположном первому направлению вращения, до затормаживания ротора в заданном втором положении покоя и запуск вращения ротора, находящегося во втором положении покоя, в первом направлении вращения. 3 н. и 14 з.п. ф-лы, 5ил.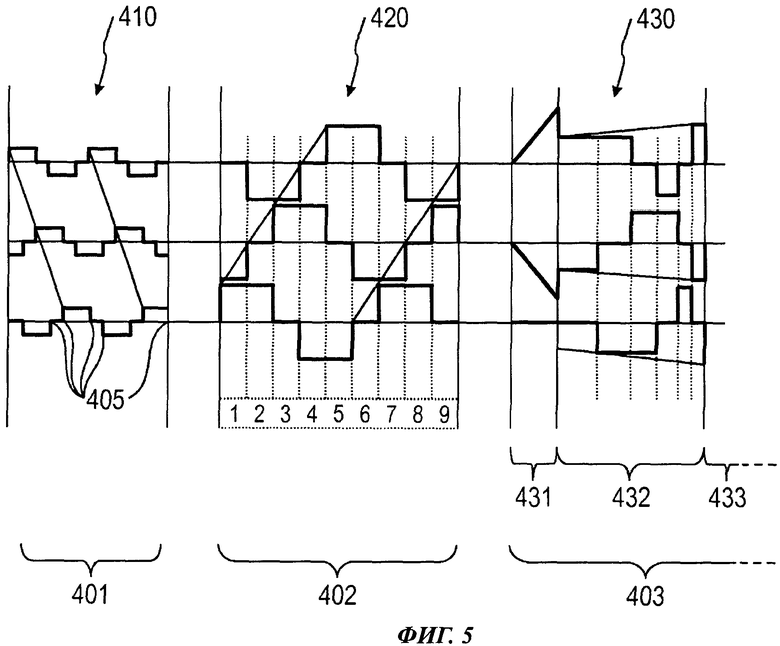
1. Способ запуска электродвигателя (100), содержащего ротор, отличающийся тем, что включает следующие этапы:
- приведение ротора во вращение в первом направлении при помощи первого крутящего момента, причем максимальное значение первого крутящего момента не превышает максимальное значение крутящего момента, противодействующего вращению ротора, так что ротор затормаживается в первом положении покоя;
- приведение ротора, находящегося в первом положении покоя, во вращение во втором направлении, противоположном первому направлению вращения, до затормаживания ротора в заданном втором положении покоя;
- запуск вращения ротора, находящегося во втором положении покоя, в первом направлении вращения.
2. Способ по п.1, отличающийся тем, что электродвигатель (100) содержит ветви (130) обмотки, а ротор приводят во вращение за счет нагрузки ветвей (130) обмотки токами (410, 420, 430) возбуждения.
3. Способ по п.1, отличающийся тем, что ротор приводят во вращение сигналом широтно-импульсной модуляции, в частности сигналом тока широтно-импульсной модуляции.
4. Способ по п.3, отличающийся тем, что коэффициент заполнения и/или такт сигнала широтно-импульсной модуляции выбирают таким образом, чтобы максимальное значение первого крутящего момента не превышало максимальное значение противодействующего крутящего момента.
5. Способ по п.1, отличающийся тем, что перед достижением первого и/или второго положения покоя обеспечивают работу электродвигателя (100) в шаговом режиме.
6. Способ по п.1, отличающийся тем, что второе положение покоя располагается под углом от 0° до 90°, предпочтительно от 30° до 60°, предпочтительнее от 35° до 45° за положением, соответствующим максимальному противодействующему крутящему моменту.
7. Способ по п.1, отличающийся тем, что при пуске двигателя из второго положения покоя развивают растущий второй крутящий момент.
8. Способ по п.7, отличающийся тем, что второй крутящий момент увеличивают поэтапно и линейно.
9. Способ по п.7, отличающийся тем, что шаг увеличения второго крутящего момента возрастает с течением времени.
10. Способ по одному из пп.7-9, отличающийся тем, что крутящий момент следует линейной характеристике пуска, в конце которой происходит переключение в режим автоматической коммутации, причем в конце линейной характеристики пуска противодействующий крутящий момент составляет менее половины, предпочтительно менее трети от максимального противодействующего крутящего момента.
11. Способ по п.1, отличающийся тем, что электродвигатель запускают в токовом режиме, а по достижении определенной частоты вращения переключают в режим напряжения.
12. Способ по п.1, отличающийся тем, что перед приведением ротора во вращение при помощи первого крутящего момента ротор затормаживают в положении покоя на определенный период.
13. Способ по п.1, отличающийся тем, что электродвигатель (100) используют, например, в качестве привода компрессора, в частности, в холодильном аппарате, причем максимальный противодействующий крутящий момент соответствует противодействующему крутящему моменту в точке компрессии.
14. Способ по п.1, отличающийся тем, что электродвигатель (100) активизируют посредством управляющих сигналов (Х1-Х6), причем во время первой попытки запуска управляющие сигналы (Х1-Х6) определяют на основании параметров состояния, имеющего место при первом максимальном противодействующем крутящем моменте, а во время второй попытки запуска, следующей за первой попыткой запуска, управляющие сигналы (Х1-Х6) определяют на основании параметров состояния, имеющего место при втором максимальном противодействующем крутящем моменте, причем второй максимальный противодействующий крутящий момент превышает первый максимальный противодействующий крутящий момент.
15. Способ запуска электродвигателя (100), содержащего ветви (130) обмотки и ротор, отличающийся тем, что включает следующие этапы:
- создание крутящего момента, приводящего ротор во вращение в первом направлении, для запуска электродвигателя (100);
- в случае если запуск электродвигателя (100) окажется безуспешным, выполнение способа, охарактеризованного в одном из пп.1-14.
16. Устройство для запуска электродвигателя, содержащего ротор, выполненное с возможностью приведения ротора во вращение в первом направлении при помощи первого крутящего момента, причем максимальное значение первого крутящего момента не превышает максимальное значение крутящего момента, противодействующего вращению ротора, так что ротор затормаживается в первом положении покоя; выполненное с возможностью приведения ротора, находящегося в первом положении покоя, во вращение во втором направлении, противоположном первому направлению вращения, до затормаживания ротора в заданном втором положении покоя и выполненное с возможностью запуска вращения ротора, находящегося во втором положении покоя, в первом направлении вращения, причем электродвигатель (100) выполнен с возможностью использования в качестве привода компрессора, в частности, в холодильном аппарате, а максимальный противодействующий крутящий момент соответствует противодействующему крутящему моменту в точке компрессии.
17. Электродвигатель, содержащий устройство, охарактеризованное в п.16.
| СПОСОБ ЭЛЕКТРОПИТАНИЯ В ПУСКОВОМ И УСТАНОВИВШЕМСЯ РЕЖИМАХ СИНХРОННОГО ДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ, В ЧАСТНОСТИ, ПРЕДНАЗНАЧЕННОГО ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ГИДРАВЛИЧЕСКОГО НАСОСА | 1999 |
|
RU2222862C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| МНОГОРЕЗЦОВАЯ ДЕРЖАВКА К ПОПЕРЕЧНОМУ СУПОРТУ АВТОМАТОВ ДЛЯ ОТРЕЗКИ ДЕТАЛЕЙ | 1937 |
|
SU52451A1 |
| Вентильный электропривод | 1985 |
|
SU1317630A1 |
| DE 10215428 A1, 23.10.2003 | |||
| US 4565957 A, 21.01.1986 | |||
| US 2007001635 A1, 04.01.2007 | |||

