Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству приведения в действие электродвигателя, включающему в себя датчик положения.
Предшествующий уровень техники
[0002] Благодаря различным преимуществам, таким как небольшие размеры, большой крутящий момент и продолжительный срок службы, шаговые электродвигатели могут легко выполнять цифровые операции позиционирования с управлением без обратной связи. Этот факт привел к получению широкого выбора применений, например информационных устройств, таких как камеры и оптические дисковые устройства, и оборудования для автоматизации делопроизводства, такого как принтеры и проекторы.
[0003] Однако шаговые электродвигатели имеют явные недостатки, такие как потеря синхронизации во время вращения с высокой скоростью или под большой нагрузкой, и более низкую эффективность, чем бесщеточные электродвигатели или электродвигатели DC (постоянного тока).
[0004] Одна известная технология для решения этих неудобств заключается в предотвращении потери синхронизации посредством осуществления выполнения кодером, оборудованным шаговым электродвигателем, операций так называемого бесщеточного электродвигателя, в котором подача питания переключается в ответ на положение ротора (смотри японский патент № 06-067259 и японский выложенный патент № 2002-359997). Эта технология позволяет осуществлять высокоскоростное функционирование посредством переключения тока, проходящего через каждую катушку, посредством сигнала, который генерируется посредством бесконтактного датчика, встроенного в электродвигатель, и выполняется его опережение по фазе в ответ на скорость электродвигателя для компенсации запаздывания в момент времени нарастания тока.
[0005] Фиг. 8 иллюстрирует крутящие моменты, действующие на электродвигатель, раскрытый в японском патенте № 06-067259 и японском выложенном патенте №2002-359997, при прохождении постоянного тока через каждую катушку электродвигателя. Ток в положительном направлении и ток в обратном направлении могут проходить через каждую из двух катушек, давая в результате четыре различные кривые изменения крутящего момента. Каждый такой крутящий момент имеет почти синусоидальную форму колебаний сигнала, и разность фаз выражается как электрический угол, равный 90 градусов. Понятие электрического угла, используемое в настоящем документе, означает угол, выраженный посредством использования одного периода синусоидальной формы сигнала, который равен 360 градусов. Если количество полюсов ротора равно n, то механический угол выражается как электрический угол x 2/n.
[0006] Идеальное последовательное переключение подачи питания на электродвигатель во время его вращения может, во всех случаях, достигать большого крутящего момента, такого как T1, обозначенный жирной линией на Фиг. 8A. При таком переключении, момент времени переключения подачи питания на катушку определяется посредством сигнала, сгенерированного каждым магнитным датчиком. Конструкция двух магнитных датчиков на интервале электрического угла, равного 90 градусам, позволяет переключать подачу питания с лучшей эффективностью.
Сущность изобретения
Техническая задача
[0007] Однако ошибка в положениях присоединения магнитных датчиков приводит к потере точности кривой изменения крутящего момента, такой как обозначенная посредством T2, иллюстрированной на Фиг. 8B, которая служит причиной понижения коэффициента полезного действия электродвигателя. Этот факт требует дополнительного процесса регулирования положений присоединения магнитных датчиков при сборке электродвигателя. Это было одним фактором повышения стоимости и понижения качества.
[0008] В японском выложенном патенте №2002-359997 раскрывается технология, в которой установлено такое время запаздывания, которое начинается с момента обнаружения положения вращения ротора, выполняемого посредством магнитных датчиков, для компенсации ошибок размещения датчиков и изменений угла намагничивания, тем самым выполняя переключение подачи питания на каждую катушку.
[0009] Однако резкое изменение нагрузки в течение времени запаздывания дает в результате различие расчетного и фактического положения вращения ротора, что вызывает потерю синхронизации. Кроме того, ротор должен приводиться в движение исключительно с нормальным контролем времени во время нескольких этапов для стабильной настройки времени задержки. Резкое изменение нагрузки во время таких этапов может вызвать дальнейшую потерю синхронизации.
Решение задач
[0010] В свете таких проблем, задача настоящего изобретения заключается в обеспечении устройства приведения в действие электродвигателя, которое способно устанавливать множество углов опережения по фазе без времени запаздывания и, таким образом, не вызывать потерю синхронизации.
[0011] Устройство приведения в действие электродвигателя в качестве аспекта настоящего изобретения включает в себя ротор, включающий в себя магнит, причем магнит имеет цилиндрическую форму и разделен, в направлении границы, на секции, каждая из которых имеет внешнюю границу, причем каждая секция имеет полярность, отличную от смежных секций, первое ярмо статора, включающее в себя первую магнитную часть, причем первое ярмо статора находится напротив внешней границы магнита, первую катушку, сконфигурированную для, если запитана, возбуждения первой магнитной части, второе ярмо статора, включающее в себя вторую магнитную часть, причем второе ярмо статора, находится напротив внешней границы магнита в положении, смещенном на электрический угол, равный приблизительно 90 градусам, относительно первой магнитной части, вторую катушку, сконфигурированную для, если запитана, возбуждения второй магнитной части, обнаруживающую часть, включающую в себя первый обнаруживающий элемент, второй обнаруживающий элемент, третий обнаруживающий элемент и четвертый обнаруживающий элемент, причем каждый обнаруживающий элемент сконфигурирован для обнаружения положения вращения ротора, и контроллер, сконфигурированный для переключения полюсов, возбужденный посредством первой магнитной части и второй магнитной части, посредством переключения направления подачи питания на первую катушку и вторую катушку на основе выходных данных из обнаруживающей части. Первый обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 0 градусов, меньше, чем величина угла запаздывания от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключается на основе выходных данных первого обнаруживающего элемента. Второй обнаруживающий элемент размещен в положении, при котором величина угла опережения по фазе от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 0 градусов, меньше, чем величина угла запаздывания от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключается на основе выходных данных второго обнаруживающего элемента. Третий обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 0 градусов, больше, чем величина угла запаздывания от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключается на основе выходных данных третьего обнаруживающего элемента. Четвертый обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 0 градусов, больше, чем величина угла запаздывания от положения, при котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных четвертого обнаруживающего элемента.
[0012] Кроме того, отличительные признаки настоящего изобретения станут очевидны из последующего описания иллюстративного варианта осуществления со ссылкой на сопроводительные чертежи.
Полезные эффекты изобретения
[0013] Настоящее изобретение обеспечивает устройство приведения в действие электродвигателя, которое способно устанавливать множество углов опережения по фазе без времени запаздывания и, таким образом, не вызывает потери синхронизации.
Краткое описание чертежей
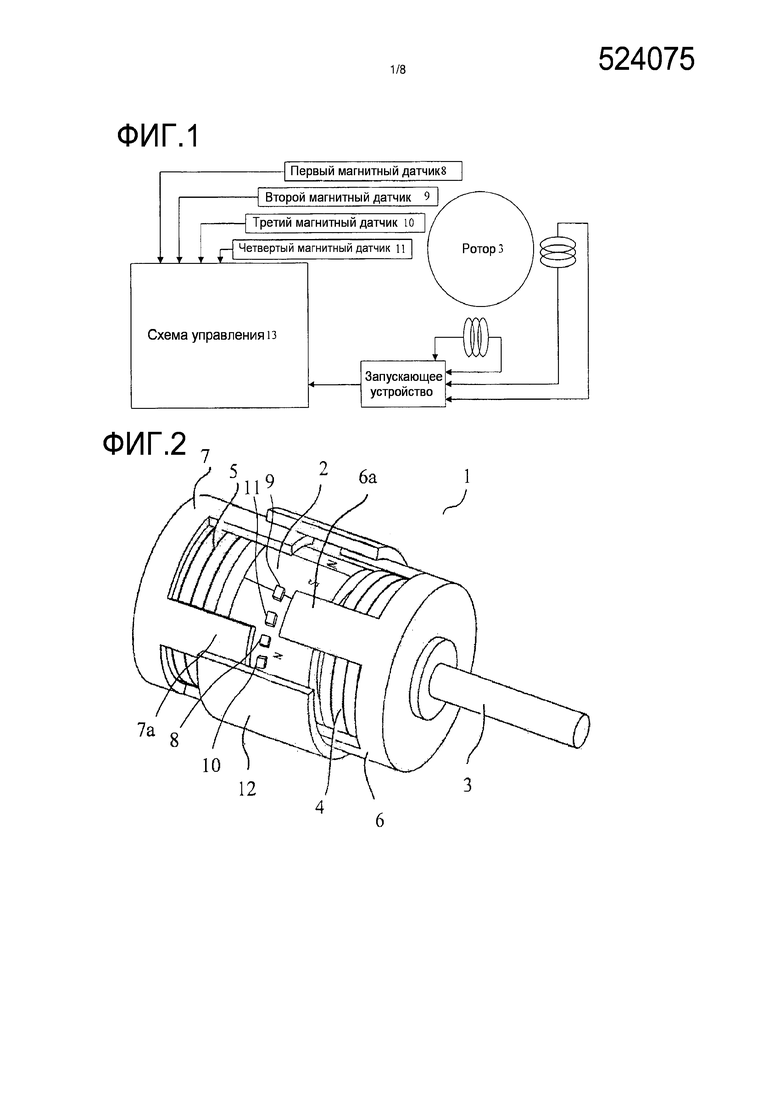
[0014] Фиг. 1 иллюстрирует блок-схему устройства приведения в действие электродвигателя согласно варианту осуществления настоящего изобретения.
Фиг. 2 иллюстрирует внешний вид электродвигателя в перспективе.
Фиг. 3 иллюстрирует график взаимосвязи угла вращения ротора и крутящего момента электродвигателя.
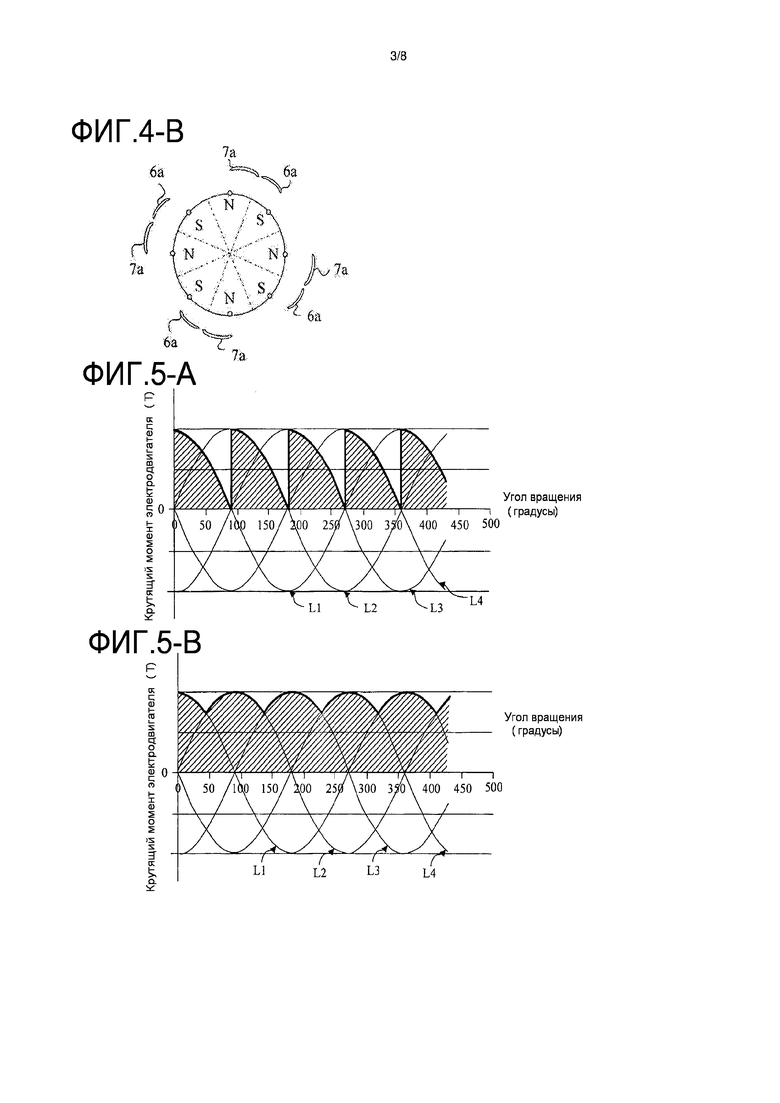
Фиг. 4A и 4B изображают виды в поперечном разрезе в направлении под прямым углом к оси электродвигателя, которые иллюстрируют фазовое соотношение между ярмами статора и магнитами.
Фиг. 5A к 5C иллюстрируют крутящие моменты, действующие на ротор, при прохождении постоянного тока через катушки электродвигателя.
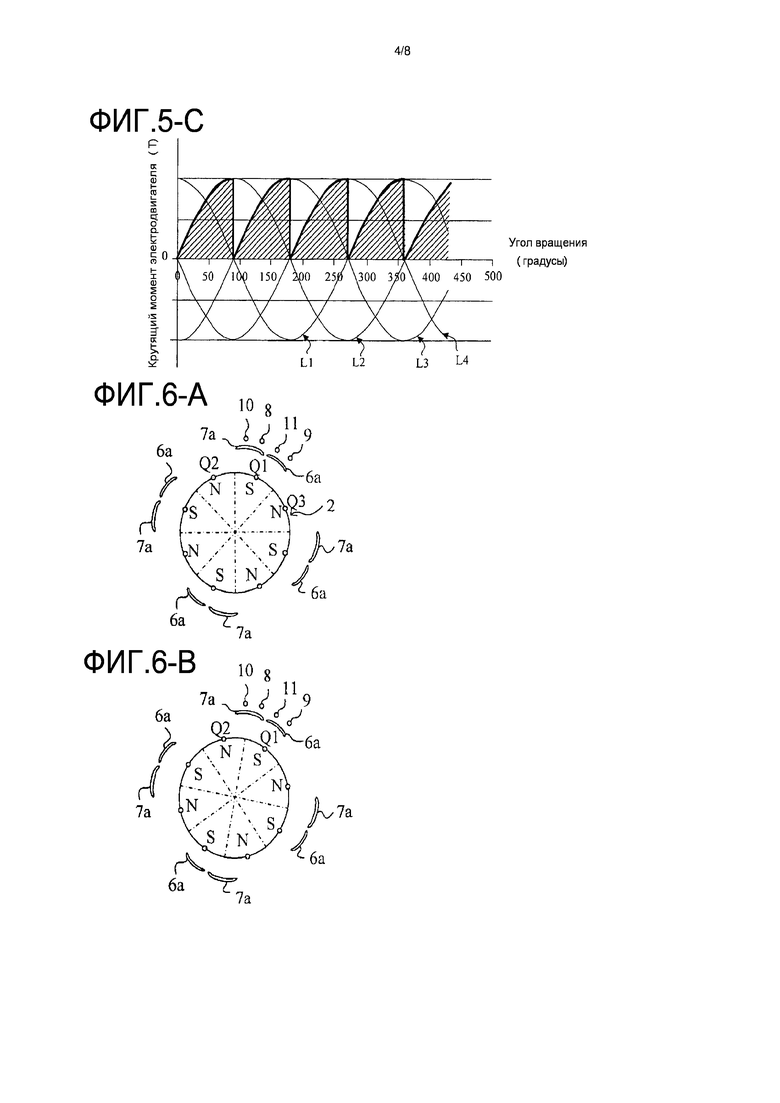
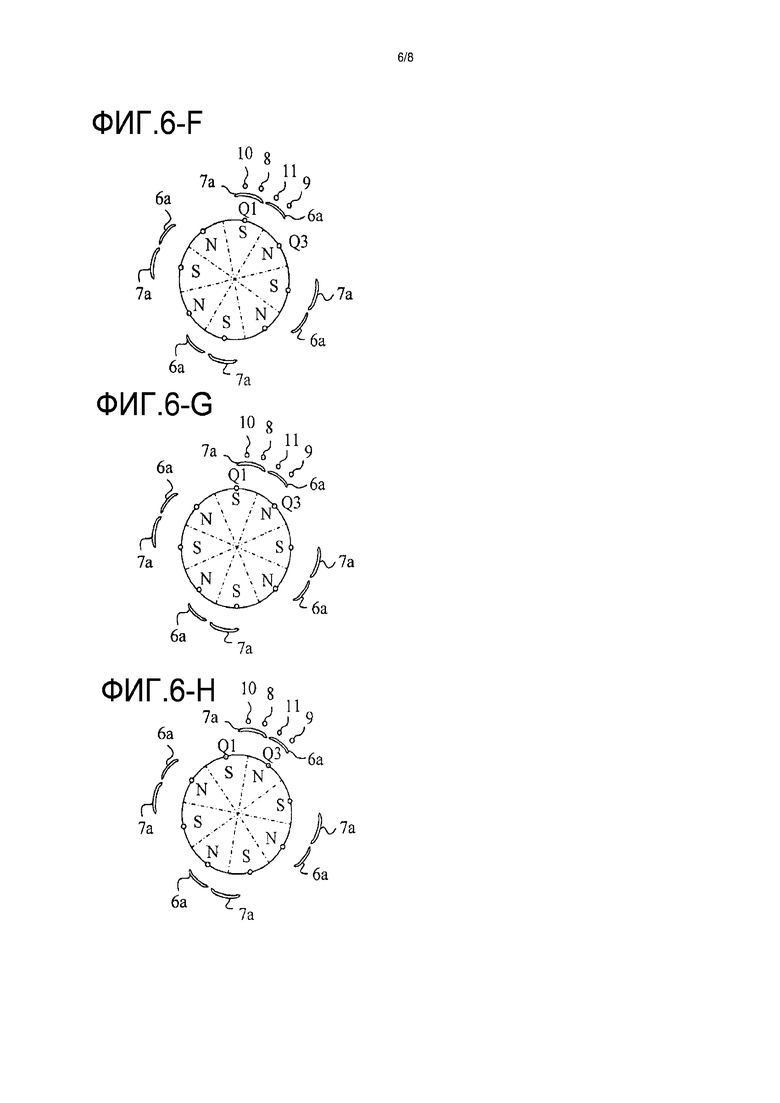
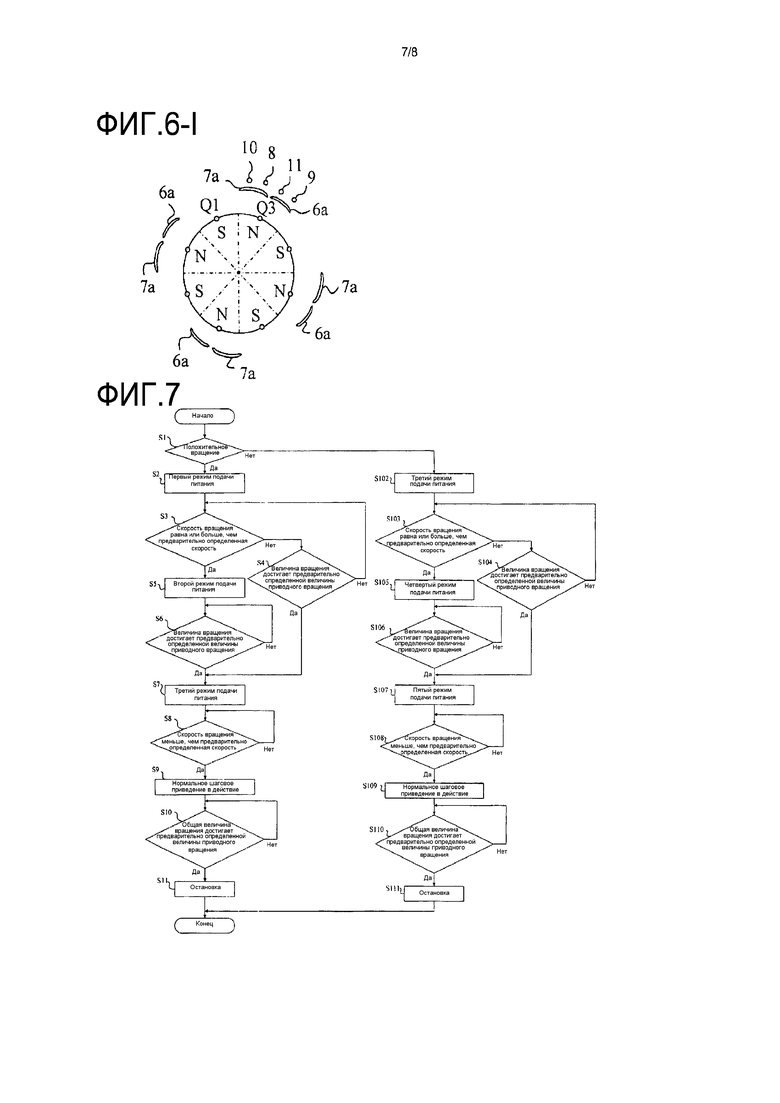
Фиг. 6A к 6I изображают виды в поперечном разрезе в направлении под прямым углом к оси электродвигателя, которые иллюстрируют фазовое соотношение между ярмами статора, магнитными датчиками и магнитами.
Фиг. 7 иллюстрирует схему последовательности операций способа управления электродвигателем.
Фиг. 8A и 8B иллюстрируют крутящие моменты, действующие на ротор при прохождении постоянного тока через катушки электродвигателя.
Описание вариантов осуществления
[0015] Ниже подробно будет описан предпочтительный вариант осуществления настоящего изобретения со ссылкой на сопроводительные чертежи.
[0016] Фиг. 1 иллюстрирует блок-схему устройства приведения в действие электродвигателя согласно варианту осуществления настоящего изобретения, и Фиг. 2 иллюстрирует внешний вид электродвигателя в перспективе. Следует отметить, что некоторые компоненты иллюстрированы в разрезе в целях объяснения.
[0017] Ротор 3 включает в себя магнит 2 и управляется с возможностью вращения посредством схемы 13 управления (контроллера). Магнит 2 сформирован в виде цилиндра и разделен, в направлении границы, на секции, каждая из которых имеет внешнюю границу, причем каждая секция имеет полярность, отличную от смежных секций. В этом варианте осуществления, магнит 2 разделен на восемь секций, то есть, на восемь намагниченных секций, но количество полюсов может быть равно, например, четырем или двенадцати.
[0018] Первая катушка 4 расположена на одном конце магнита 2 в направлении оси.
[0019] Первое ярмо 6 статора, которое состоит из магнитно-мягкого материала, размещено напротив внешней границы магнита 2, причем между первым ярмом 6 статора и внешней границей имеется зазор. Первое ярмо 6 статора включает в себя множество первых магнитных частей 6a, тянущихся от цилиндрической основной части в направлении оси и расположенных в направлении границы на предварительно определенных интервалах. Первые магнитные части 6a возбуждаются посредством подачи питания на первую катушку 4.
[0020] Первая катушка 4, первое ярмо 6 статора и магнит 2 размещенный напротив первых магнитных частей 6a, вместе составляют первый блок статора.
[0021] Вторая катушка 5 расположена на конце, размещенном напротив другого конца в направлении оси, в котором прикреплена первая катушка 4 магнита 2.
[0022] Второе ярмо 7 статора, которое состоит из магнитно-мягкого материала, размещено напротив внешней границы магнита 2, причем между вторым ярмом 7 статора и внешней границей находится зазор. Второе ярмо 7 статора включает в себя множество вторых магнитных частей 7a, тянущихся от основной части цилиндрической формы в направлении оси и расположенных в направлении границы на предварительно определенных интервалах. Вторые магнитные части 7a возбуждаются посредством запитывания второй катушки 5.
[0023] Вторая катушка 5, второе ярмо 7 статора и магнит 2, размещенный напротив вторых магнитных частей 7a, вместе составляют второй блок статора.
[0024] Переключение полюса (полюса N/полюса S), возбужденного посредством первых магнитных частей 6a и вторых магнитных частей 7a позволяет выполнять изменение крутящего момента, передаваемого на ротор 3.
[0025] Первый магнитный датчик (первый обнаруживающий элемент) 8, второй магнитный датчик (второй обнаруживающий элемент) 9, третий магнитный датчик (третий обнаруживающий элемент) 10 и четвертый магнитный датчик (четвертый обнаруживающий элемент) 11 вместе составляют обнаруживающий механизм. Каждый магнит является элементом на эффекте холла, который обнаруживает магнитный поток магнита 2 и прикреплен к кожуху 12 двигателя.
[0026] Кожух 12 двигателя осуществляет крепление и поддержание первого ярма 6 статора и второго ярма 7 статора таким образом, чтобы первые магнитные части 6a и вторые магнитные части 7a были расположены под электрическим углом, равным приблизительно 90 градусов относительно фазы намагничивания магнита 2.
[0027] Термин электрический угол, используемый в настоящем документе, означает угол, выраженный посредством использования одного периода магнитной силы магнита 2, который равен 360 градусам. Если количество полюсов ротора 3 равно M, и механический угол равен θ0, то электрический угол может быть выражен посредством следующего уравнения.
θ=θ0×M/2
[0028] Поскольку количество полюсов, намагничиваемых в этом варианте осуществления, равно восьми, электрический угол в 90 градусов равен механическому углу в 22,5 градусов.
[0029] Ниже будет описано функционирование режима переключения питания на основе обратной связи с использованием электрического угла.
[0030] Фиг. 3 иллюстрирует взаимосвязь между углом вращения ротора 3 и крутящим моментом электродвигателя 1 при прохождении постоянного тока через катушки электродвигателя 1. Горизонтальная ось представляет электрический угол, а вертикальная ось - крутящий момент двигателя, соответственно. Крутящий момент, вызывающий вращение ротора 3 по часовой стрелке, определен как положительный.
[0031] Фиг. 4A и 4B изображают виды в поперечном разрезе в направлении под прямым углом к оси электродвигателя, которые иллюстрируют фазовое соотношение между каждым ярмом статора и магнитом 2.
[0032] Предполагается, что положительный ток, проходящий через первую катушку 4, производит намагничивание первых магнитных частей 6a, и положительный ток, проходящий через вторую катушку 5, производит намагничивание вторых магнитных частей 7a.
[0033] Фаза в состоянии, иллюстрированном на Фиг. 4A, обозначена как «a» на Фиг. 3. Фиг. 4A иллюстрирует состояние, в котором расстояние от центров намагниченных полюсов до первых магнитных частей 6a и расстояние от центров полюсов до вторых магнитных частей 7a являются одинаковыми. В состоянии, иллюстрированном на Фиг. 4A, генерируется сила, поддерживающая фазу вращения, но не генерируется движущая сила вращения. Причина состоит в том, что полюса S магнита 2 притягиваются посредством первых магнитных частей 6a и вторых магнитных частей 7a и, таким образом, остаются в таком состоянии.
[0034] Вторые магнитные части 7a возбуждаются таким образом, чтобы становиться полюсами S из состояния, иллюстрированного на Фиг. 4A, что вызывает вращение ротора 3 для его перехода в состояние, иллюстрированное на Фиг. 4B.
[0035] На Фиг. 4B, так же, как и в состоянии, иллюстрированном на Фиг. 4A, генерируется сила, поддерживающая фазу вращения, но движущая сила вращения не генерируется. Более конкретно, полюса S и полюса N магнита 2 притягиваются посредством первых магнитных частей 6a и вторых магнитных частей 7a, соответственно, и остаются в таком состоянии.
[0036] Таким же способом, как было описано выше, может производиться непрерывное вращение ротора 3 посредством переключения направлений подачи питания на первую катушку 4 и на вторую катушку 5 для переключения полярностей первых магнитных частей 6a и вторых магнитных частей 7a.
[0037] Переключение полюсов, возбужденных посредством первых магнитных частей 6a и вторых магнитных частей 7a в момент времени, в котором такая движущая сила вращения не генерируется, далее в настоящем документе упоминается как переключение подачи питания с электрическим углом опережения по фазе равным 0 градусам. Переключение полюсов, возбужденных посредством первых магнитных частей 6a и вторых магнитных частей 7a в более ранний момент времени, чем такой момент времени, далее в настоящем документе упоминается как переключение возбуждения с электрическим углом опережения по фазе равным γ градусов.
[0038] Фиг. 5A по 5C иллюстрируют графики, иллюстрирующие угол вращения ротора в виде горизонтальной оси и крутящий момент двигателя, генерируемый при подаче питания на первую катушку 4 и вторую катушку 5, в виде вертикальной оси. Горизонтальная ось выражена посредством электрического угла.
[0039] L1 является кривой крутящего момента, наблюдаемой если направление подачи питания относительно первой катушки 4 является положительным, и направление подачи питания относительно второй катушки 5 является положительным. L2 является кривой крутящего момента, наблюдаемой, если направление подачи питания относительно первой катушки 4 является положительным, и направление подачи питания относительно второй катушки 5 является обратным. L3 является кривой крутящего момента, наблюдаемой, если направление подачи питания относительно первой катушки 4 является обратным, и направление подачи питания относительно второй катушки 5 является обратным. L4 является кривой крутящего момента, наблюдаемой, когда направление подачи питания относительно первой катушки 4 является обратным, и направление подачи питания относительно второй катушки 5 является положительным.
[0040] Фиг. 5A иллюстрирует состояние, наблюдаемое если электрический угол опережения по фазе равен 0 градусов. Однако последовательное переключение направления подачи питания относительно каждой катушки в такой момент времени не дает большой мощности в качестве мощности электродвигателя 1. Причина состоит в том, что крутящий момент двигателя, как обозначено наклонными частями и жирной линией, имеет чрезвычайно малую фазу, наблюдаемой непосредственно перед переключением направления подачи питания.
[0041] Фиг. 5B иллюстрирует состояние, наблюдаемое, если электрический угол опережения по фазе равен 45 градусов. В этом состоянии крутящий момент электродвигателя, генерируемый при переключении направления подачи питания, максимизирован.
[0042] Переключение направления подачи питания относительно каждой катушки с электрическим углом опережения по фазе равным 90 градусов при более раннем моменте времени дает крутящий момент двигателя, обозначенный наклонными частями, как иллюстрировано на Фиг. 5C. Полученный в результате крутящий момент имеет числовое значение, подобное значению, полученному при значении электрического угла опережения по фазе равном 0 градусов. Это означает, что большая движущая сила вращения не может быть получена.
[0043] В этом варианте осуществления может быть получена большая движущая сила вращения, даже если направление подачи питания переключается посредством размещения каждого магнитного датчика, относительно каждого ярма статора, в его соответствующем положении, описанном ниже.
[0044] Со ссылкой на Фиг. 6A по 6I будут описаны фактические этапы функционирования электродвигателя 1, где состоянием по умолчанию является состоянием, иллюстрированным на Фиг. 6A.
[0045] (1) Вращение по часовой стрелке
[0046] (1-i) Приведение в движение с малым углом опережения по фазе
[0047] Будет дано объяснение этапов функционирования при вращении ротора 3 по часовой стрелке (первый режим подачи питания). Эти операции выполняются посредством переключения состояния возбуждения каждой первой магнитной части 6a посредством выходного сигнала, сгенерированного посредством первого магнитного датчика 8, и посредством переключения состояния возбуждения каждой первой магнитной части 7a посредством выходного сигнала, сгенерированного посредством второго магнитного датчика 9. Направление по часовой стрелке, в котором вращается ротор 3, определено как первое направление вращения.
[0048] Каждое направление подачи питания переключается в следующей комбинации.
[0049] Если первый магнитный датчик 8 обнаруживает полюс S магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N. Если первый магнитный датчик 8 обнаруживает полюс N магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S.
[0050] Если второй магнитный датчик 9 обнаруживает полюс S магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S. Если второй магнитный датчик 9 обнаруживает полюс N магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом N.
[0051] В состоянии, иллюстрированном на Фиг. 6A, каждый первый магнитный датчик 8 и второй магнитный датчик 9 обнаруживают полюс S магнита 2. В результате, каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N, а каждая вторая магнитная часть 7a - полюсом S, соответственно, производя силу вращения по часовой стрелке как в роторе 3, так и в магните 2.
[0052] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6A, центр Q1 намагниченного полюса магнита 2 и центр каждой первой магнитной части 6a располагаются друг напротив друга, как иллюстрировано на Фиг. 6B.
[0053] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6B, расстояние от центра Q1 намагниченного полюса магнита 2 до первой магнитной части 6a и расстояние от центра Q2 полюса магнита 2, где полярность намагничивания этого полюса является обратной по сравнению с центром Q1 ко второй магнитной части 7a, становятся, как иллюстрировано на Фиг. 6C, одинаковыми.
[0054] Первый магнитный датчик 8 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, когда полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных из первого магнитного датчика 8. Эта конструкция позволяет первому магнитному датчику 8 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6B, в состояние, иллюстрированное на Фиг. 6C. При этом переходе, на первую катушку 4 подается питание таким образом, чтобы каждая первая магнитная часть 6a возбуждалась таким образом, чтобы стать полюсом S. Кроме того, как только второй магнитный датчик 9 обнаруживает полюс S магнита 2, на вторую катушку 5 подается питание таким образом, чтобы каждая вторая магнитная часть 7a возбуждалась таким образом, чтобы стать полюсом S, производя силу вращения по часовой стрелке как в роторе 3, так и в магните 2.
[0055] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6C, центр Q2 намагниченного полюса магнита 2 и центр второй магнитной части 7a расположены друг напротив друга, как иллюстрировано на Фиг. 6D.
[0056] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6D, расстояние от центра Q2 намагниченного полюса магнита 2 до первой магнитной части 6a и расстояние от центра Q2 до второй магнитной части 7a становятся, как иллюстрировано на Фиг. 6E, одинаковыми.
[0057] Второй магнитный датчик 9 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, когда полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных из второго магнитного датчика 9. Эта конструкция позволяет второму магнитному датчику 9 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6D, в состояние, иллюстрированное на Фиг. 6E. При этом переходе, на вторую катушку 5 подается питание таким образом, что каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом N. Кроме того, как только первый магнитный датчик 8 обнаруживает полюс N магнита 2, на первую катушку 4 подается питание таким образом, что каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения по часовой стрелке как в роторе 3, так и в магните 2.
[0058] Как было описано выше, подача питания последовательно переключается, чтобы вызвать непрерывное вращение ротора 3 и магнита 2 по часовой стрелке.
[0059] Первый магнитный датчик 8 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, когда полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных из первого магнитного датчика 8. Это означает, что первый магнитный датчик 8 размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части 6a равен 0 градусов, меньше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части 6a равен 90 градусов. Второй магнитный датчик 9 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, когда полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных второго магнитного датчика 9. Это означает, что второй магнитный датчик 9 размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части 7a равен 0 градусов, меньше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части 7a равен 90 градусов. Эти конструкции приводят к уменьшенному отклонению в фазе, по сравнению с фазой, наблюдаемой в состоянии, в котором возбуждение поддерживается без переключения направления подачи питания каждой катушки, даже если направление подачи питания каждой катушки переключается на основе выходных данных каждого магнитного датчика. Следовательно, не наблюдается большого различия между фазой ротора 3 и магнита 2 в отношении шагового приведения в движение, и фазой, которая наблюдается в отношении приведения в действие посредством переключения подачи питания на каждую катушку на основе выходных данных из каждого магнитного датчика. Следовательно, плавное переключение функционирования может быть выполнено без вибрации или колебания, даже если выполняется переключение шагового приведения в действие и бесщеточного приведения в действие, в котором выходные данные каждого датчика контролируются на основе обратной связи. Приведение в действие с таким электрическим углом опережения по фазе является желательным, особенно если приведение в действие начинается с состояния остановки, или если выполняется переключение из состояния приведения в действие в состояние остановки.
[0060] (1-ii) Приведение в действие с большим углом опережения по фазе
[0061] Чем быстрее становится скорость вращения ротора 3, тем медленнее становится скорость, в которой выполняется намагничивание каждой магнитной части посредством противодействующей электродвижущей силы или индуктивного компонента. Следовательно, может быть получена большая движущая сила вращения посредством переключения направления подачи питания на каждую катушку относительно положения вращения ротора 3 в более ранний момент времени.
[0062] Будет дано объяснение этапов функционирования вращения ротора 3 по часовой стрелке (второго режима подачи питания). Эти этапы функционирования выполняются посредством переключения состояния возбуждения каждой первой магнитной части 6a на основе выходного сигнала, сгенерированного из третьего магнитного датчика 10, и посредством переключения состояния возбуждения каждой второй магнитной части 7a на основе выходного сигнала, сгенерированного из четвертого магнитного датчика 11.
[0063] Каждое направление подачи питания переключается в следующей комбинации.
[0064] Если третий магнитный датчик 10 обнаруживает полюс S магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N. Если третий магнитный датчик 10 обнаруживает полюс N магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S.
[0065] Если четвертый магнитный датчик 11 обнаруживает полюс S магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S. Если четвертый магнитный датчик 11 обнаруживает полюс N магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом N.
[0066] В состоянии, иллюстрированном на Фиг. 6A, каждый третий магнитный датчик 10 и четвертый магнитный датчик 11 обнаруживают полюс S магнита 2. В результате, каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N, а каждая вторая магнитная часть 7a - полюсом S, соответственно, вызывая возникновение силы вращения по часовой стрелке как в роторе 3, так и в магните 2.
[0067] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6A, центр Q1 намагниченного полюса магнита 2 и центр каждой первой магнитной части 6a размещаются друг напротив друга, как иллюстрировано на Фиг. 6B.
[0068] Третий магнитный датчик 10 расположен таким образом, чтобы момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находился в пределах диапазона электрических углов опережения по фазе 45-90 градусов, когда полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных третьего магнитного датчика 10. Эта конструкция обеспечивает возможность обнаружения третьим магнитным датчиком 10 полюса N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6A, в состояние, иллюстрированное на Фиг. 6B. При этом переходе, на первую катушку 4 подается питание таким образом, чтобы каждая первая магнитная часть 6a возбуждалась таким образом, чтобы стать полюсом S. Кроме того, как только четвертый магнитный датчик 11 обнаруживает полюс S магнита 2, на вторую катушку 5 подается питание таким образом, чтобы каждая вторая магнитная часть 7a возбуждалась таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения по часовой стрелке как в роторе 3, так и в магните 2.
[0069] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6B, центр Q2 намагниченного полюса магнита 2 и центр второй магнитной части 7a располагаются друг напротив друга, как иллюстрировано на Фиг. 6D, через состояние, иллюстрированное на Фиг. 6C.
[0070] Четвертый магнитный датчик 11 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных четвертого магнитного датчика 11. Эта конструкция позволяет четвертому магнитному датчику 11 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6C, в состояние, иллюстрированное на Фиг. 6D. При этом переходе на вторую катушку 5 подается питание таким образом, что каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом N. Кроме того, как только третий магнитный датчик 10 обнаруживает полюс N магнита 2, на первую катушку 4 подается питание таким образом, что каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения по часовой стрелке как в роторе 3, так и в магните 2.
[0071] Как было описано выше, осуществляется последовательное переключение подачи питания, чтобы вызвать непрерывное вращение ротора 3 и магнита 2 по часовой стрелке.
[0072] Третий магнитный датчик 10 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных третьего магнитного датчика 10. Это означает, что третий магнитный датчик 10 размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части 6a равен 0 градусов, больше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части 6a равен 90 градусов. Четвертый магнитный датчик 11 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, когда полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных четвертого магнитного датчика 11. Это означает, что четвертый магнитный датчик 11 размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части 7a равен 0 градусов, больше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части 7a равен 90 градусов. Эта конструкция дает большую движущую силу вращения в связи с тем, что при вращении ротора 3 с высокой скоростью, момент времени, в который выполняется намагничивание каждой второй магнитной части 7a, является моментом времени, в котором электрический угол опережения по фазе достигает, по существу, 45 градусов. Следовательно, приведение в действие с таким электрическим углом опережения по фазе, является желательным, особенно при вращении ротора 3 по часовой стрелке с высокой скоростью.
[0073] (2) Вращение против часовой стрелки
[0074] (2-i) Приведение в действие с малым углом опережения по фазе
[0075] Будет дано объяснение этапов функционирования вращения ротора 3 против часовой стрелки (третьего режима подачи питания). Эти этапы функционирования выполняются посредством переключения состояния возбуждения каждой первой магнитной части 6a посредством выходного сигнала, сгенерированного из третьего магнитного датчика 10, и посредством переключения состояния возбуждения каждой второй магнитной части 7a посредством выходного сигнала, сгенерированного из четвертого магнитного датчика 11. Направление против часовой стрелки, в котором вращается ротор 3 и которое является обратным направлением относительно первого направления вращения, определено как второе направление вращения.
[0076] Каждое направление подачи питания переключается в следующей комбинации.
[0077] Если третий магнитный датчик 10 обнаруживает полюс S магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N. Если третий магнитный датчик 10 обнаруживает полюс N магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N.
[0078] Если второй магнитный датчик 9 обнаруживает полюс S магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом N. Если второй магнитный датчик 9 обнаруживает полюс N магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S.
[0079] В состоянии, иллюстрированном на Фиг. 6A, каждый третий магнитный датчик 10 и четвертый магнитный датчик 11 обнаруживают полюс S магнита 2. В результате, каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S, а каждая вторая магнитная часть 7a - полюсом N, соответственно, вызывая возникновение силы вращения против часовой стрелки как в роторе 3, так и в магните 2.
[0080] При вращении ротора 3 против часовой стрелки из состояния, иллюстрированного на Фиг. 6A, центр Q1 намагниченного полюса магнита 2 и центр каждой второй магнитной части 7a размещаются друг напротив друга, как иллюстрировано на Фиг. 6F.
[0081] При вращении ротора 3 против часовой стрелки из состояния, иллюстрированного на Фиг. 6F, расстояния от центра Q1 намагниченного полюса магнита 2 до второй магнитной части 7a и расстояние от центра Q3 полюса магнита 2, где полярность намагничивания этого полюса является обратной по сравнению с центром Q1, до первой магнитной части 6a, становятся, как иллюстрировано на Фиг. 6G, одинаковыми.
[0082] Четвертый магнитный датчик 11 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, когда полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных четвертого магнитного датчика 11. Эта конструкция позволяет четвертому магнитному датчику 11 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6F, в состояние, иллюстрированное на Фиг. 6G. При этом переходе, на вторую катушку 5 подается питание таким образом, что каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S. Кроме того, как только третий магнитный датчик 10 обнаруживает полюс S магнита 2, на первую катушку 4 подается питание таким образом, что каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения против часовой стрелки как в роторе 3, так и в магните 2.
[0083] При вращении ротора 3 против часовой стрелки из состояния, иллюстрированного на Фиг. 6G, центр Q3 намагниченного полюса магнита 2 и центр первой магнитной части 6a располагаются друг напротив друга, как иллюстрировано на Фиг. 6H.
[0084] При вращении ротора 3 против часовой стрелки из состояния, иллюстрированного на Фиг. 6H, расстояния от центра Q3 намагниченного полюса магнита 2 до первой магнитной части 6a и расстояние от центра Q3 до второй магнитной части 7a становятся, как иллюстрировано на Фиг. 61, одинаковыми.
[0085] Третий магнитный датчик 10 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, когда полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных третьего магнитного датчика 10. Эта конструкция позволяет третьему магнитному датчику 9 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6H, в состояние, иллюстрированное на Фиг. 61. При этом переходе, первая катушка 4 запитывается таким образом, что каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N. Кроме того, как только четвертый магнитный датчик 11 обнаруживает полюс N магнита 2, на вторую катушку 5 подается питание таким образом, что каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения против часовой стрелки как в роторе 3, так и в магните 2.
[0086] Как было описано выше, питание последовательно переключается, чтобы вызывать непрерывное вращение ротора 3 и магнита 2 против часовой стрелки.
[0087] Третий магнитный датчик 10 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных третьего магнитного датчика 10. Четвертый магнитный датчик 11 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных четвертого магнитного датчика 11. Эти конструкции приводят к уменьшенному отклонению в фазе по сравнению с фазой, наблюдаемой в состоянии, в котором возбуждение поддерживается без переключения направления подачи питания каждой катушки, даже если направление подачи питания каждой катушки переключается на основе выходных данных каждого магнитного датчика. Следовательно, не наблюдается большой разницы между фазой ротора 3 и магнитом 2 в случае нормального шагового приведения в действие, и фазой, которая наблюдается в случае приведения в действие посредством переключения подачи питания на каждую катушку на основе выходных данных каждого магнитного датчика. Следовательно, плавное переключение этапов функционирования может быть выполнено без вибрации или колебания, даже если выполняется переключение шагового приведения в действие и бесщеточного приведения в действие, в котором выходные данные каждого датчика управляются на основе обратной связи. Приведение в действие с таким электрическим углом опережения по фазе является желательным, особенно если приведение в действие начинается с состояния остановки, или если выполняется переключение из состояния приведения в действие в состояние остановки.
[0088] (2 ii) Приведение в действие с большим углом опережения по фазе
[0089] Чем быстрее становится скорость вращения ротора 3, тем медленнее становится скорость, при которой каждая магнитная часть намагничивается посредством встречной электродвижущей силы или индуктивного компонента. Следовательно, может быть получена большая движущая сила вращения посредством переключения направления подачи питания каждой катушки относительно положения вращения ротора 3 в более ранний момент времени.
[0090] Будет дано объяснение этапов функционирования вращения ротора 3 против часовой стрелки (четвертого режима подачи питания). Эти этапы функционирования выполняются посредством переключения состояния возбуждения каждой первой магнитной части 6a на основе выходного сигнала, генерируемого первым магнитным датчиком 8 и посредством переключения состояния возбуждения каждой второй магнитной части 7 на основе выходного сигнала, генерируемого вторым магнитным датчиком 9.
[0091] Каждое направление подачи питания переключается в следующей комбинации.
[0092] Если первый магнитный датчик 8 обнаруживает полюс S магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S. Если первый магнитный датчик 8 обнаруживает полюс N магнита 2, то каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N.
[0093] Если второй магнитный датчик 9 обнаруживает полюс S магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом N. Если второй магнитный датчик 9 обнаруживает полюс N магнита 2, то каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S.
[0094] В состоянии, иллюстрированном на Фиг. 6A, каждый первый магнитный датчик 8 и второй магнитный датчик 9 обнаруживают полюс S магнита 2. В результате, каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S, а каждая вторая магнитная часть 7a - полюсом N, соответственно, вызывая возникновение силы вращения против часовой стрелки как в роторе 3, так и в магните 2.
[0095] При вращении ротора 3 по часовой стрелке из состояния, иллюстрированного на Фиг. 6A, центр Q1 намагниченного полюса магнита 2 и центр каждой второй магнитной части 7a размещаются друг напротив друга, как иллюстрировано на Фиг. 6F.
[0096] Второй магнитный датчик 9 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных второго магнитного датчика 9. Эта конструкция позволяет второму магнитному датчику 9 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6A, в состояние, иллюстрированное на Фиг. 6F. При этом переходе, на вторую катушку 5 подается питание таким образом, что каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S. Кроме того, как только первый магнитный датчик 8 обнаруживает полюс S магнита 2, первая катушка 4 запитывается таким образом, что каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения против часовой стрелки как в роторе 3, так и в магните 2.
[0097] При вращении ротора 3 против часовой стрелки из состояния, иллюстрированного на Фиг. 6F, центр Q3 намагниченного полюса магнита 2 и центр первой магнитной части 6a расположены друг напротив друга, как иллюстрировано на Фиг. 6H, через состояние, иллюстрированное на Фиг. 6G.
[0098] Первый магнитный датчик 8 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных из первого магнитного датчика 8. Эта конструкция позволяет первому магнитному датчику 8 обнаруживать полюс N магнита 2 во время перехода из состояния, иллюстрированного на Фиг. 6G, в состояние, иллюстрированное на Фиг. 6H. При этом переходе, первая катушка 4 запитывается таким образом, что каждая первая магнитная часть 6a возбуждается таким образом, чтобы стать полюсом N. Кроме того, как только второй магнитный датчик 9 обнаруживает полюс N магнита 2, на вторую катушку 5 подается питание таким образом, что каждая вторая магнитная часть 7a возбуждается таким образом, чтобы стать полюсом S, вызывая возникновение силы вращения против часовой стрелки как в роторе 3, так и в магните 2.
[0099] Как было описано выше, выполняется последовательное переключение подачи питания, чтобы вызвать возникновение непрерывного вращения ротора 3 и магнита 2 против часовой стрелки.
[0100] Первый магнитный датчик 8 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных из первого магнитного датчика 8. Второй магнитный датчик 9 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных второго магнитного датчика 9. Эта конструкция дает большую движущую силу вращения в связи с тем, что, при вращении ротора 3 с высокой скоростью, момент времени, в который выполняется намагничивание каждой магнитной части, является моментом времени, в котором электрический угол опережения по фазе достигает, по существу, 45 градусов. Следовательно, приведение в действие с таким электрическим углом опережения по фазе является желательным, особенно при вращении ротора 3 против часовой стрелки с высокой скоростью.
[0101] Как было описано выше, в случае вращения по часовой стрелке, каждый датчик располагается следующим образом. Первый магнитный датчик 8 располагается таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных из первого магнитного датчика 8.
[0102] Второй магнитный датчик 9 располагается таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3, находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных второго магнитного датчика 9.
[0103] Третий магнитный датчик 10 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных третьего магнитного датчика 10.
[0104] Четвертый магнитный датчик 11 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных четвертого магнитного датчика 11.
[0105] С другой стороны, в случае вращения против часовой стрелки, каждый магнитный датчик расположен следующим образом. Первый магнитный датчик 8 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных из первого магнитного датчика 8.
[0106] Второй магнитный датчик 9 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных второго магнитного датчика 9.
[0107] Третий магнитный датчик 10 расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если полюс, возбуждаемый посредством каждой первой магнитной части 6a, переключается на основе выходных данных третьего магнитного датчика 10.
[0108] Четвертый магнитный датчик 11 расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a относительно положения вращения ротора 3 находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если полюс, возбуждаемый посредством каждой второй магнитной части 7a, переключается на основе выходных данных четвертого магнитного датчика 11.
[0109] С практической точки зрения, каждый магнитный датчик должен быть расположен в подходящем положении, в котором может быть получена большая движущая сила вращения, с учетом таких факторов, как ошибки намагничивания магнита 2, ошибки размеров датчика и ошибки ярма статора.
[0110] С учетом таких факторов, в случае вращения по часовой стрелке, каждый магнитный датчик предпочтительно расположен следующим образом. Первый магнитный датчик 8 предпочтительно расположен таким образом, что момент времени переключения возбуждения первого блока статора находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов. Третий магнитный датчик 10 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a, находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов. Второй магнитный датчик 9 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов. Четвертый магнитный датчик 11 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов.
[0111] С другой стороны, в случае вращения против часовой стрелки, каждый магнитный датчик предпочтительно расположен следующим образом. Первый магнитный датчик 8 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов. Третий магнитный датчик 10 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой первой магнитной части 6a находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов. Второй магнитный датчик 9 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов. Четвертый магнитный датчик 11 предпочтительно расположен таким образом, что момент времени переключения возбуждения каждой второй магнитной части 7a находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов.
[0112] Кроме того, следует учитывать, что необходимо избегать ситуации, в которой характеристики вращения в направлении как по часовой стрелке, так и против часовой стрелки, потеряны. Другими словами, каждый магнитный датчик должен быть расположен таким образом, чтобы средняя точка линии, соединяющей первый магнитный датчик 8 и третий магнитный датчик 10, была размещена в положении, в котором момент времени переключения возбуждения каждой первой магнитной части 6a достигает электрического угла опережения по фазе в 45 градусов. Аналогично, каждый магнитный датчик должен быть расположен таким образом, чтобы средняя точка линии, соединяющей второй магнитный датчик 9 и четвертый магнитный датчик 11, была размещена в положении, в котором момент времени переключения возбуждения каждой второй магнитной части 7a достигал электрического угла опережения по фазе в 45 градусов.
[0113] В этом варианте осуществления используются два различных блока датчика. Один является блоком, включающим в себя первый магнитный датчик 8 и третий магнитный датчик 10. Другой является блоком, включающим в себя второй магнитный датчик 9 и четвертый магнитный датчик 11. В случае вращения по часовой стрелке, первый магнитный датчик 8 размещается в положении, в котором момент времени переключения возбуждения каждой первой магнитной части 6a достигает электрического угла опережения по фазе в 21 градус, а третий магнитный датчик 10 находится в положении, в котором момент времени переключения возбуждения каждой первой магнитной части 6a достигает электрического угла опережения по фазе в 69 градусов, соответственно. Второй магнитный датчик 9 размещен в положении, в котором момент времени переключения возбуждения каждой второй магнитной части 7a достигает электрического угла опережения по фазе в 21 градус, а четвертый магнитный датчик 11 в положении, в котором момент времени переключения возбуждения каждой второй магнитной части 7a достигает электрического угла опережения по фазе в 69 градусов, соответственно.
[0114] Теперь, со ссылкой на схему последовательности операций из Фиг. 7, будет описан способ управления приведением в действие электродвигателя 1.
[0115] Во-первых, предполагается, что установлена величина A приводного вращения.
[0116] На этапе S1, выбирается направление вращения ротора 3. Процесс переходит на этап S2, если направлением вращения является направление по часовой стрелке, или на этап S102, если направлением вращения является направление против часовой стрелки.
[0117] На этапе S2, выполняется подача питания в первом режиме подачи питания. Более конкретно, возбуждение каждой первой магнитной части 6a и каждой второй магнитной части 7a переключается на основе выходных данных из первого магнитного датчика 8 и второго магнитного датчика 9, соответственно, чтобы вызвать вращение ротора 3 и магнита 2 по часовой стрелке.
[0118] На этапе S3, определяется скорость вращения ротора 3. Скорость вращения ротора 3 может быть измерена посредством использования каждого магнитного датчика или посредством использования известных детекторов скорости (не иллюстрированных на чертеже). Если скорость вращения меньше, чем предварительно определенная скорость, то процесс переходит на этап S4, или если скорость вращения равна или больше, чем такая предварительно определенная скорость, процесс переходит на этап S5.
[0119] На этапе S4, определяется величина приводного вращения ротора 3. Если общая величина вращения достигает A величины приводного вращения, которая меньше предварительно определенной величины B, то процесс переходит на этап S7.
[0120] На этапе S5, выполняется подача питания во втором режиме подачи питания. Более конкретно, возбуждение каждой первой магнитной части 6a и каждой второй магнитной части 7a переключается на основе выходных данных третьего магнитного датчика 10 и четвертого магнитного датчика 11, соответственно, чтобы вызвать вращение ротора 3 и магнита 2 по часовой стрелке.
[0121] На этапе S6, определяется величина приводного вращения ротора 3. Если общая величина вращения достигает величины A приводного вращения, которая меньше предварительно определенной величины B, то процесс переходит на этап S7.
[0122] На этапе S7, выполняется подача питания во втором режиме подачи питания. Более конкретно, возбуждение каждой первой магнитной части 6a и каждой второй магнитной части 7a переключается на основе выходных данных третьего магнитного датчика 10 и четвертого магнитного датчика 11, соответственно, чтобы вызвать вращение ротора 3 и магнита 2 против часовой стрелки. Во время этого вращения против часовой стрелки, ротор 3 и магнит 2 резко замедляются вследствие передаваемой на них движущей силы в направлении по часовой стрелке, но при этом, их вращение против часовой стрелки продолжается в силу их инертной массы. Альтернативно, подача питания в четвертом режиме подачи питания может быть выполнена на этапе S7.
[0123] На этапе S8, определяется скорость вращения ротора 3. Если ротор 3 замедляется до предварительно определенной скорости вращения, то процесс переходит на этап S9.
[0124] На этапе S9, режим приведения в действие переключается из бесщеточного приведения в действие, в котором направление подачи питания переключается посредством обратной связи на выходные данные, сгенерированные каждым магнитным датчиком, на шаговое приведение в действие при помощи импульсного сигнала, которое является способом приведения в действие для нормальных двухфазных шаговых электродвигателей типа PM2.
[0125] На этапе S10, если общая величина вращения достигает величины A приводного вращения, то процесс переходит на этап S11. На этапе S11, шагового приведения в действие остановлено, чтобы остановить ротор 3 в целевом положении.
[0126] На этапе S102, выполняется подача питания в третьем режиме подачи питания. Более конкретно, возбуждение каждой первой магнитной части 6a и каждой второй магнитной части 7a переключается на основе выходных данных третьего магнитного датчика 10 и четвертого магнитного датчика 11, соответственно, чтобы вызвать вращение ротора 3 и магнита 2 против часовой стрелки.
[0127] На этапе S103, определяется скорость вращения ротора 3. Более конкретно, скорость вращения ротора 3 может быть измерена посредством использования каждого магнитного датчика или посредством использования известных детекторов скорости (не иллюстрированных на чертеже). Если скорость вращения меньше, чем предварительно определенная скорость, то процесс переходит на этап S104, или если скорость вращения равна или больше, чем такая предварительно определенная скорость, то процесс переходит на этап S105.
[0128] На этапе S104, определяется величина приводного вращения ротора 3. Если общая величина вращения достигает значения A приводного вращения, которая меньше предварительно определенной величины B, то процесс переходит на этап S107.
[0129] На этапе S105, выполняется подача питания в четвертом режиме подачи питания. Более конкретно, возбуждение каждой первой магнитной части 6a и каждой второй магнитной части 7a переключается на основе выходных данных из первого магнитного датчика 8 и второго магнитного датчика 9, соответственно, чтобы вызвать вращение ротора 3 и магнита 2 против часовой стрелки.
[0130] На этапе S106, определяется величина приводного вращения ротора 3. Если общая величина вращения достигает значения A приводного вращения, которая меньше предварительно определенной величины B, то процесс переходит на этап S107.
[0131] На этапе S107, выполняется подача питания в первом режиме подачи питания. Более конкретно, возбуждение каждой первой магнитной части 6a и каждой второй магнитной части 7a переключается на основе выходных данных из первого магнитного датчика 8 и второго магнитного датчика 9, соответственно, чтобы вызвать вращение ротора 3 и магнита 2 по часовой стрелке. Во время этого вращения по часовой стрелке, ротор 3 и магнит 2 резко замедляются вследствие подаваемой на них движущей силы в направлении против часовой стрелки, но, но при этом, их вращение против часовой стрелки продолжается в силу их инертной массы. Альтернативно, подача питания во втором режиме подачи питания может быть выполнена на этапе S107.
[0132] На этапе S108, определяется скорость вращения ротора 3. Если ротор 3 замедляется до предварительно определенной скорости вращения, то процесс переходит на этап S109.
[0133] На этапе S109, режим приведения в действие переключается с бесщеточного приведения в действие, в котором направление подачи питания переключается посредством обратной связи на основе выходных данных, сгенерированных каждым магнитным датчиком, на шаговое приведение в действие при помощи импульсного сигнала, который является способом приведения в действие нормальных двухфазных шаговых электродвигателей типа PM2.
[0134] На этапе S110, если общая величина вращения достигает величины A приводного вращения, то процесс переходит на этап S111. На этапе S1111, шаговое приведение в действие останавливается для остановки ротора 3 в целевом положении.
[0135] Как было описано выше, в этом варианте осуществления, множество углов опережения по фазе может быть установлено без времени запаздывания. Эта установка обеспечивает возможность управления приведением в действие с двумя различными углами опережения по фазе в направлениях вращения как по часовой стрелке, так и против часовой стрелки.
[0136] Кроме того, подача питания во время перехода из положения приведения в действие в положение остановки, в фазе подачи питания с углом опережения по фазе, наблюдаемым во время обратного вращения, обеспечивает возможность быстрого замедления, которое, в свою очередь, приводит к более высокой способности управления остановкой.
[0137] Несмотря на то, что настоящее изобретение было описано со ссылкой на иллюстративный вариант осуществления, следует понимать, что изобретение не ограничено раскрытым иллюстративным вариантом осуществления. Объем следующей формулы изобретения должен получить самую широкую интерпретацию для того, чтобы охватывать все такие модификации и эквивалентные структуры и функции.
[0138] Настоящая заявка притязает на приоритет японской заявки на патент №2012-284086, поданной 27 декабря 2012 г., которая полностью включена в состав настоящего документа посредством ссылки.
Промышленная применимость
[0139] Настоящее изобретение обеспечивает устройство приведения в действие электродвигателя, которое способно устанавливать множество углов опережения по фазе без времени запаздывания и, таким образом, не вызывает потери синхронизации.
Список ссылочных обозначений
[0140] 1 ЭЛЕКТРОДВИГАТЕЛЬ
2 МАГНИТ
3 РОТОР
4 ПЕРВАЯ КАТУШКА
5 ВТОРАЯ КАТУШКА
6 ПЕРВОЕ ЯРМО СТАТОРА
6a ПЕРВАЯ МАГНИТНАЯ ЧАСТЬ
7 ВТОРОЕ ЯРМО СТАТОРА
7a ВТОРАЯ МАГНИТНАЯ ЧАСТЬ
8 ПЕРВЫЙ МАГНИТНЫЙ ДАТЧИК
9 ВТОРОЙ МАГНИТНЫЙ ДАТЧИК
10 ТРЕТИЙ МАГНИТНЫЙ ДАТЧИК
11 ЧЕТВЕРТЫЙ МАГНИТНЫЙ ДАТЧИК
12 КОЖУХ ДВИГАТЕЛЯ
13 СХЕМА УПРАВЛЕНИЯ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАТВОРА И УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ, ВКЛЮЧАЮЩЕЕ В СЕБЯ УСТРОЙСТВО ЗАТВОРА | 2013 |
|
RU2636414C1 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СТЕКЛООЧИСТИТЕЛЬ | 2013 |
|
RU2587457C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2015 |
|
RU2650879C2 |
| СПОСОБ ОЦЕНИВАНИЯ ПОЛОЖЕНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ | 2015 |
|
RU2663224C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| РОТОР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2010 |
|
RU2543526C2 |
| СИСТЕМА И СПОСОБ ДЛЯ НАМАГНИЧИВАНИЯ РОТОРОВ ТИПА ПОСТОЯННЫХ МАГНИТОВ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2006 |
|
RU2412516C2 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ И ЧАСТОТЫ ВРАЩЕНИЯ РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА ДЛЯ СИСТЕМЫ ЗАЖИГАНИЯ | 2007 |
|
RU2364746C2 |
| ЭЛЕКТРИЧЕСКИЙ ИНСТРУМЕНТ | 2007 |
|
RU2440233C2 |
| Способ регулирования многофазной электрической машины и система многофазной электрической машины для такого способа | 2021 |
|
RU2773000C1 |



Изобретение относится к электротехнике, а именно к устройствам управления электродвигателем. Устройство приведения в действие электродвигателя содержит ротор, первое ярмо статора с первой магнитной частью и катушкой возбуждения, второе ярмо статора со второй магнитной частью и катушкой возбуждения, узел обнаружения с четырьмя обнаруживающими элементами для обнаружения положений ротора и контроллер управления переключением катушек возбуждения магнитных частей электродвигателя. Обнаруживающие элементы размещены в положения, обеспечивающие соответствующие углы опережения по фазе от момента времени переключения катушек возбуждения по сигналам определенного обнаруживающего элемента в зависимости от направления вращения. Технический результат состоит в обеспечении устройства управления электродвигателем возможностью устанавливать множество углов опережения по фазе без запаздывания для сохранения синхронизации. 5 з.п. ф-лы, 20 ил. 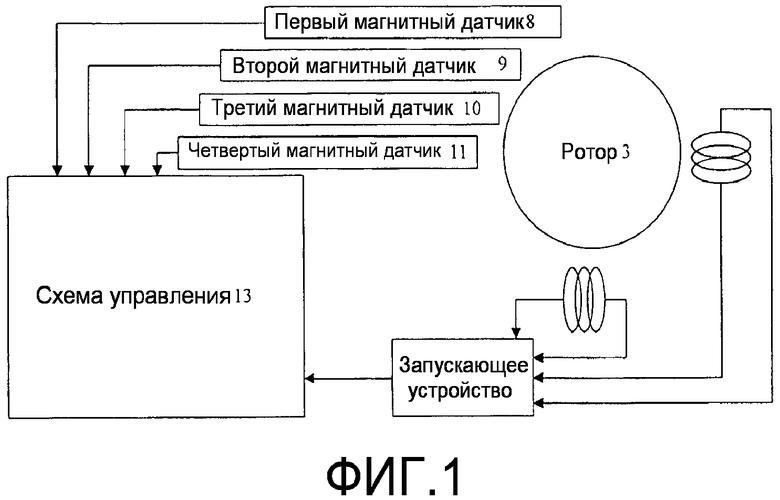
1. Устройство приведения в действие двигателя, содержащее:
ротор, включающий в себя магнит, при этом магнит имеет цилиндрическую форму и разделен в направлении границы на секции, каждая из которых имеет внешнюю границу, причем каждая секция имеет полярность, отличную от смежных секций;
первое ярмо статора, включающее в себя первую магнитную часть, причем первое ярмо статора находится напротив внешней границы магнита;
первую катушку, сконфигурированную, при подаче на нее питания, для возбуждения первой магнитной части;
второе ярмо статора, включающее в себя вторую магнитную часть, причем второе ярмо статора находится напротив внешней границы магнита в положении, смещенном на электрический угол в 90 градусов относительно первой магнитной части;
вторую катушку, сконфигурированную, при подаче на нее питания, для возбуждения второй магнитной части;
обнаруживающую часть, включающую в себя первый обнаруживающий элемент, второй обнаруживающий элемент, третий обнаруживающий элемент и четвертый обнаруживающий элемент, причем каждый обнаруживающий элемент сконфигурирован для обнаружения положения вращения ротора; и
контроллер, сконфигурированный для переключения полюса, возбужденного посредством первой магнитной части и второй магнитной части, посредством переключения направления подачи питания на первую катушку и вторую катушку на основе выходных данных обнаруживающей части,
в котором первый обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 0 градусов, меньше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных первого обнаруживающего элемента,
в котором второй обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 0 градусов, меньше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных второго обнаруживающего элемента,
в котором третий обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 0 градусов, больше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой первой магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных третьего обнаруживающего элемента, и
в котором четвертый обнаруживающий элемент размещен в положении, в котором величина угла опережения по фазе от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 0 градусов, больше, чем величина угла запаздывания от положения, в котором электрический угол опережения по фазе от момента времени переключения возбуждения каждой второй магнитной части равен 90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных четвертого обнаруживающего элемента.
2. Устройство приведения в действие электродвигателя по п. 1,
в котором первый обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных первого обнаруживающего элемента,
в котором второй обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных второго обнаруживающего элемента,
в котором третий обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных третьего обнаруживающего элемента, и
в котором четвертый обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных четвертого обнаруживающего элемента.
3. Устройство приведения в действие электродвигателя по п. 2,
в котором первый обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если производится вращение ротора во втором направлении вращения, которое является обратным направлением к первому направлению вращения, и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных первого обнаруживающего элемента,
в котором второй обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе 45-90 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных второго обнаруживающего элемента,
в котором третий обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных третьего обнаруживающего элемента, и
в котором четвертый обнаруживающий элемент размещен в положении, в котором момент времени переключения возбуждения каждой второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрических углов опережения по фазе от 0 до 45 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных четвертого обнаруживающего элемента.
4. Устройство приведения в действие электродвигателя по п. 1, дополнительно содержащее:
часть обнаружения скорости,
в котором контроллер переключает направление подачи питания
на первую катушку на основе выходных данных первого обнаруживающего элемента и направление подачи питания второй катушки на основе выходных данных второго обнаруживающего элемента, если производится вращение ротора в первом направлении вращения и если скорость вращения ротора, обнаруженная посредством части обнаружения скорости, меньше, чем предварительно определенная скорость вращения,
в котором контроллер переключает направление подачи питания на первую катушку на основе выходных данных третьего обнаруживающего элемента и направление подачи питания второй катушки на основе выходных данных четвертого обнаруживающего элемента, если производится вращение ротора в первом направлении вращения и если скорость вращения ротора, обнаруженная посредством части обнаружения скорости, равна или больше, чем предварительно определенная скорость вращения,
в котором контроллер переключает направление подачи питания на первую катушку на основе выходных данных третьего обнаруживающего элемента и направление подачи питания второй катушки на основе выходных данных четвертого обнаруживающего элемента, если производится вращение ротора во втором направлении вращения и если скорость вращения ротора, обнаруженная посредством части обнаружения скорости, меньше, чем предварительно определенная скорость вращения,
в котором контроллер переключает направление подачи питания на первую катушку на основе выходных данных первого обнаруживающего элемента и направление подачи питания второй катушки на основе выходных данных второго обнаруживающего элемента, если производится вращение ротора во втором направлении вращения и если скорость вращения ротора, обнаруженная посредством части обнаружения скорости, равна или больше, чем предварительно определенная скорость вращения.
5. Устройство приведения в действие электродвигателя по п. 2,
в котором первый обнаруживающий элемент размещен в положении, в котором момент времени возбуждения первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных первого обнаруживающего элемента,
в котором второй обнаруживающий элемент размещен в положении, в котором момент времени возбуждения второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных второго обнаруживающего элемента,
в котором третий обнаруживающий элемент размещен в положении, в котором момент времени возбуждения первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных третьего обнаруживающего элемента, и
в котором четвертый обнаруживающий элемент размещен в положении, в котором момент времени возбуждения второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов, если производится вращение ротора в первом направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных четвертого обнаруживающего элемента.
6. Устройство приведения в действие электродвигателя по п. 3,
в котором первый обнаруживающий элемент размещен в положении, в котором момент времени возбуждения первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных первого обнаруживающего элемента,
в котором второй обнаруживающий элемент размещен в положении, в котором момент времени возбуждения второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 56,4 до 75,6 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных второго обнаруживающего элемента,
в котором третий обнаруживающий элемент размещен в положении, в котором момент времени возбуждения первой магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством первой магнитной части, переключен на основе выходных данных третьего обнаруживающего элемента, и
в котором четвертый обнаруживающий элемент размещен в положении, в котором момент времени возбуждения второй магнитной части относительно положения вращения ротора находится в пределах диапазона электрического угла опережения по фазе от 14,4 до 33,6 градусов, если производится вращение ротора во втором направлении вращения и если полюс, возбужденный посредством второй магнитной части, переключен на основе выходных данных четвертого обнаруживающего элемента.
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ОБРЫВА В ТРАНСФОРМАТОРЕ ТОКА С ДВУМЯ СЕРДЕЧНИКАМИ, А ТАКЖЕ АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 2021 |
|
RU2820252C2 |
| JP 2006105652 A, 20.04.2006 | |||
| CN 104052352 A, 17.09.2014. | |||

