Изобретение относится к орбитальному движению искусственных спутников планеты, в частности Земли (ИСЗ), совершающих групповой полет.
Известны способы группового орбитального полета космических аппаратов (КА), например, последовательно выводимых на близкие орбиты (КА "Восток-3" и "Восток-4", КА "Восток-5" и "Восток-6", КА "Союз-6", "Союз-7" и "Союз-8"), см. "Мировая пилотируемая космонавтика. История. Техника. Люди." под ред. Ю.М. Батурина, М., изд-во "РТСофт", 2005 г., стр. 19-25, 91-93 (аналоги).
Координированное (групповое, эскадренное) движение космических аппаратов в орбитальном строю осуществляется путем придания всем либо некоторым КА строя способности к согласованному программному изменению параметров своей орбиты в рамках разрешенных пространственных допусков и располагаемых запасов характеристической скорости. Аппарат, способный к выполнению координированного пространственного маневра, будем называть управляемым или активным. В свою очередь, КА, не способный по каким-либо причинам к орбитальному маневру, будем называть неуправляемым или пассивным.
В качестве ближайшего аналога принят способ группового орбитального движения двух ИСЗ в рамках шведского космического эксперимента Prisma - активного (управляемого) КА Mango и пассивного (неуправляемого) КА Tango, см. Е. Землякова "Старт, "Днепра": советские технологии на благо европейских заказчиков"; "Prisma: нас уже двое!" / "Новости космонавтики" №8, 10, 2010 г. Космические аппараты были запущены ракетой-носителем "Днепр" 15 июня 2010 г. на общую орбиту и в процессе полета неоднократно расходились на расстояние до нескольких километров (при точности определения взаимного положения на уровне ~1 м).
К недостаткам способа - ближайшего аналога следует отнести отсутствие режима автономного управления активным КА с целью поддержания заданной (программной) конфигурации строя относительно наблюдателя на поверхности Земли, а также невозможность прямого (без существенных доработок) перенесения опыта совместного маневрирования КА Mango и Tango на группу из развернутых по фронту трех и более ИСЗ (для поддержания заданной конфигурации строя относительно наблюдателя на поверхности Земли).
Целью предлагаемого изобретения является создание способа группового орбитального движения двух и более ИСЗ (включающего их полет по близким орбитам с возможностью изменения положения активных аппаратов относительно пассивного), при реализации которого для разнесенного по фронту, глубине и высоте строя ИСЗ будет циклически поддерживаться заданная конфигурация орбитального построения относительно наблюдателя на поверхности Земли.
Указанная цель достигается тем, что среднюю за виток угловую скорость всех ИСЗ группы выдерживают одинаковой. При этом в качестве средней за виток угловой скорости принимают угловую скорость пассивного ИСЗ группы. В свою очередь, пассивный ИСЗ располагают на центральной орбите группы. При этом каждый активный ИСЗ занимает начальное в цикле орбитальное положение за время не более 1/16 своего периода обращения. Среднюю за виток угловую скорость каждый активный ИСЗ выдерживает циклическим расхождением по направлению полета и высоте относительно положения пассивного ИСЗ и других активных ИСЗ группы. При этом каждый активный ИСЗ занимает и поддерживает свое орбитальное положение в группе путем выдачи реактивных импульсов бортовой двигательной установкой. Контроль взаимного положения ИСЗ в группе осуществляют не реже 8 раз за виток путем обмена данными о координатах и времени определения координат всех ИСЗ группы, полученными от бортовой аппаратуры пользователя спутниковой навигационной системы.
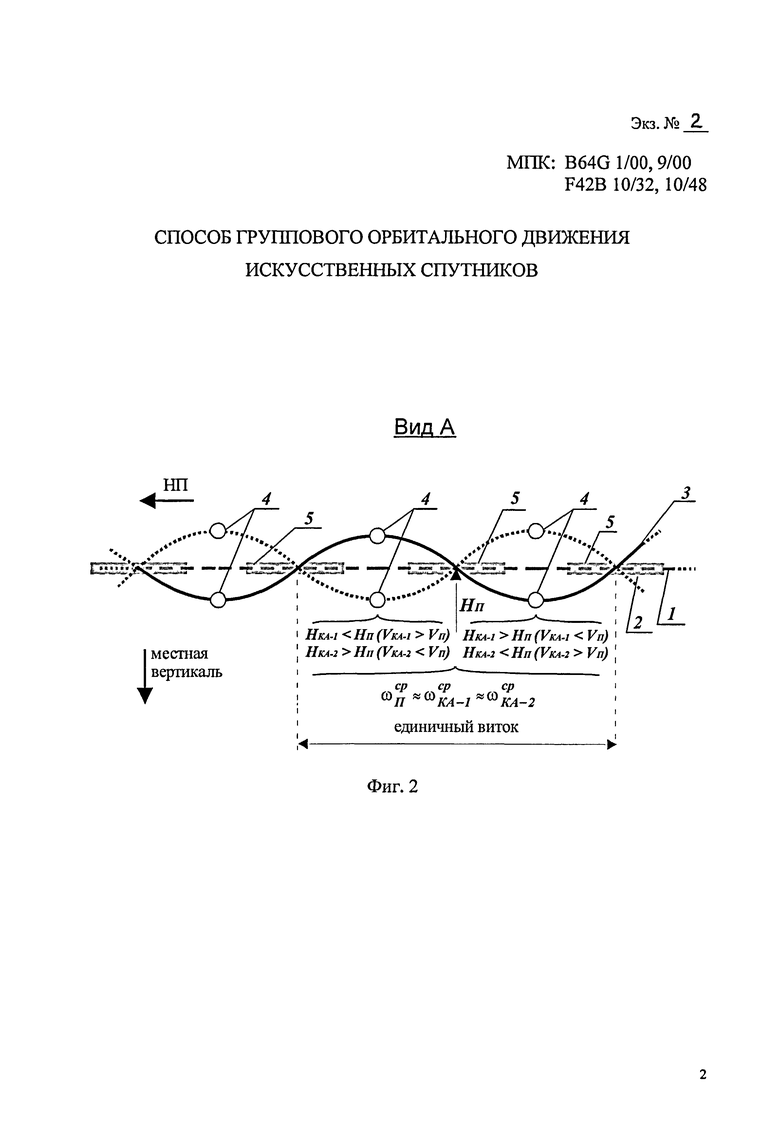
Схема реализации группового орбитального движения ИСЗ по предлагаемому техническому решению для трех аппаратов - одного пассивного и двух активных (КА-1 и КА-2) - приведена на фиг.1 и 2. Приняты обозначения:
1 - траектория пассивного ИСЗ;
2 - траектория активного КА-1;
3 - траектория активного КА-2;
4 - зона максимально близкого схождения КА группы для наземного наблюдателя;
5 - двойная зона последовательного "правого" и "левого" расположения активных ИСЗ, когда совместно с пассивным ИСЗ конфигурация группового орбитального изображения для наземного наблюдателя находится в области допустимых (в плане) искажений.
Пусть в начальный момент цикла (витка) высота полета пассивного аппарата (НП) и активных КА-1 (HКА-1) и КА-2 (HКА-2) одинакова (HП=HКА-1=НКА-2). Расстояние S между аппаратами по нормали к направлению полета (НП) в плоскости местной горизонтали (МГ) мало в сравнении с высотой (S<<НП, НКА-1, НКА-2), при этом угол расхождения двух активных КА вдоль S относительно центра Земли составляет α. Орбитальные скорости всех аппаратов (соответственно, VП, V1 и V2) в начальный момент движения также равны (VП=V1=V2). При этом программные параметры орбит всех ИСЗ группы строго различаются на малую, но конкретную величину (эксцентриситета, некомпланарности, ориентации линии апсид и т.д.), что позволяет, при отсутствии возмущений, осуществлять долговременное безударное циклическое относительное движение в ограниченной области пространства вблизи друг друга.
К основным возмущениям, вызывающим "естественные" уходы ИСЗ строя, можно отнести:
- несовпадение плоскостей и конфигурации орбит аппаратов орбитального строя вследствие их программного разведения по фронту и различий эксцентриситетов;
- различие аэродинамических сил вдоль направления полета вследствие особенностей ориентации и конструктивного исполнения каждого конкретного ИСЗ строя;
- баллистические ошибки выведения (начального положения в строю) каждого ИСЗ;
- возмущения от действия несферичности гравитационного поля Земли, магнитного поля Земли, солнечного светового давления, притяжения Луны и Солнца, взаимодействия электрического заряда поверхности ИСЗ с плазмой, ударов микрометеоров;
- возмущения от внутренних факторов (например, погрешностей ориентации сопел реактивных двигателей при маневрах) и т.д.
В соответствии с предлагаемым техническим решением групповое координированное орбитальное движение осуществляется:
- в плоскости орбиты каждого активного ИСЗ - путем согласованного с угловой скоростью (и соответственно, периодом обращения) пассивного ИСЗ циклического изменения высоты (и соответственно, текущей угловой скорости) полета активного аппарата посредством выбора соответствующей конфигурации орбиты;
- в плоскости местной горизонтали - путем программного расхождения плоскостей орбит пассивного и каждого активного ИСЗ строя (см. фиг.1, 2).
Парирование возмущений, вызывающих дрейф КА относительно программных траекторных значений его координат, обеспечивается путем коррекции направления дрейфа активного ИСЗ при его выходе за пределы заданной зоны эскадренной позиции.
Поскольку плоскости орбит поз.1, поз.2 и поз.3 ИСЗ группы не совпадают, на каждом витке вокруг Земли будут иметь место два "пересечения" (α=0) плоскостей их траекторий (зона поз.4). При этом для рационального (с точки зрения запасов бортовой энергетики, а также допустимых искажений наблюдаемого с Земли изображения) расхождения развернутых по фронту космических аппаратов достаточным условием будет выполнение циклического маневра вдоль местной вертикали активными КА, что достигается соответствующим выбором параметров их траекторий поз.2, 3 (например, незначительным отличием эксцентриситетов) относительно орбиты поз.1 пассивного аппарата (см., например, В.И. Левантовский "Механика космического полета в элементарном изложении", М.: "Наука", 1974, стр.114-120). При этом должно выполняться обязательное условие цельности строя для наземного наблюдателя:

где 
С целью обеспечения надежности формирования и поддержания заданного орбитального построения ИСЗ в качестве средней за виток угловой скорости группы целесообразно принять 
Следует отметить, что, с целью формирования заданного орбитального изображения в пределах допустимых для наземного наблюдателя искажений, каждый активный ИСЗ группы должен занять начальное в цикле орбитальное положение за время не более 1/16 своего периода обращения. В противном случае визуально воспринимаемая наблюдателем с Земли деформация орбитального изображения оказывается чрезмерной. При этом каждый активный аппарат занимает и поддерживает свое орбитальное положение в группе путем выдачи реактивных импульсов бортовой двигательной установкой.
Проекция траекторий поз.1, поз.2 и поз.3 ИСЗ группы на "распрямленную" (в плоскости чертежа) МГ представлена на фиг.1. Здесь Sпр - заданное программное значение S; ΔS - разрешенное отклонение (допуск) на максимальное расхождение (сближение) КА-1 и КА-2 в плоскости МГ, при котором изображение строя с Земли наблюдается без заметных искажений (таким образом, в "двойной серой" зоне поз.5 расположения КА-1 и КА-2 орбитальное изображение всего эскадренного строя при наблюдении с Земли соответствует расчетному, между "двойными серыми" зонами поз.5 орбитальное изображение сливается в "цепочку" ИСЗ; такое "пульсирование" орбитального изображения развернутой по фронту группы космических аппаратов тем заметнее визуально, чем больше значение α).
Проекция траекторий КА-1 и КА-2 (поз.2 и поз.3) на плоскость орбиты поз.1 пассивного ИСЗ показана на фиг.2. При этом разность высот КА-1 и КА-2 в точке визуального "пересечения" их траекторий (поз.4) может составлять от сотен метров до единиц километров. Смещение КА-1 относительно КА-2 в проекции на плоскость МГ, обусловленное периодическим изменением V1 от высоты "подныривания" (V1>V2 при HКА-1<НКА-2) до высоты "перепрыгивания" (V1<V2 при HКА-1>НКА-2) и наоборот, не будет превышать десятков метров (что является приемлемым с точки зрения допустимых в плане искажений орбитального изображения).
Выполнение условия
- контроль текущей высоты НП, НКА-1, НКА-2;
- контроль текущей скорости VП, V1, V2;
- контроль отклонений вдоль НП и по нормали к НП каждым активным КА относительно их программного значения на данном участке витка.
Техническая реализация указанного контроля может производиться, например, с применением периодического приема-передачи навигационной информации не реже 8 раз за виток (цикл), что осуществляется путем взаимного обмена данными о координатах, а также времени определения координат всех ИСЗ группы; эту навигационную информацию каждый ИСЗ получает посредством собственной бортовой аппаратуры пользователя спутниковой навигационной системы (например, ГЛОНАСС, GPS, в перспективе - Galileo). Такой вариант контроля пространственного положения каждого ИСЗ строя представляется наиболее рациональным по критерию "стоимость - эффективность - время разработки и ввода в эксплуатацию".
При увеличении количества активных ИСЗ в группе для каждого из них определяется заданное программное положение в "двойных серых" зонах поз.5 и порядок их согласованного маневрирования, необходимый для этого запас характеристической скорости и, соответственно, бортовой запас топлива, границы (допуски ΔS) на максимально допустимое для данной высоты расхождение (сближение) аппаратов.
Применение предложенного технического решения целесообразно для эскадренных ИСЗ космической рекламы, групповых КА-мишеней для калибровки и юстировки оптических (в том числе лазерных) и радиотехнических наземных комплексов контроля космического пространства, групп КА-инспекторов некооперированных орбитальных объектов, при осуществлении координированных многопозиционных измерений параметров космического пространства и верхней атмосферы в интересах научного знания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ | 2014 |
|
RU2569236C1 |
| ИСКУССТВЕННЫЙ СПУТНИК ЗЕМЛИ | 2014 |
|
RU2579600C1 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| СПОСОБ УПРАВЛЕНИЯ СХОДОМ КОСМИЧЕСКОГО АППАРАТА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2559430C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2562908C2 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2440281C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2441821C1 |

Изобретение относится к управлению групповым полетом, в котором среднюю угловую скорость всех искусственных спутников Земли (ИСЗ) в группе поддерживают равной средней за виток угловой скорости пассивного ИСЗ. Последний располагают на центральной орбите группы. Активные ИСЗ поддерживают свое орбитальное положение относительно пассивного ИСЗ путем периодической реактивной коррекции. Техническим результатом изобретения является обеспечение заданной конфигурации строя ИСЗ, наблюдаемой с определённых мест поверхности Земли. 2 ил.
Способ группового орбитального движения активных и пассивного искусственных спутников Земли (ИСЗ), включающий их полет по близким орбитам с возможностью изменения положения активных ИСЗ относительно пассивного ИСЗ, отличающийся тем, что среднюю угловую скорость всех ИСЗ группы выдерживают одинаковой, при этом в качестве средней за виток угловой скорости принимают угловую скорость пассивного ИСЗ, который располагают на центральной орбите группы.

