Настоящее изобретение относится к способу и системе для транспортировки и объединения двух или более групп ступенчато уложенных почтовых отправлений.
Известны формирование и транспортировка групп ступенчато уложенных отдельных предметов, то есть групп отдельных предметов, выровненных в предпочтительно прямом направлении, частично перекрывающих друг друга и имеющих соответствующие края, расположенные на постоянном или переменном расстоянии друг от друга.
Ступенчато уложенные группы, как правило, транспортируют посредством систем ленточных конвейеров с одной единственной конвейерной лентой, образующей опорную поверхность для ступенчато уложенных групп, или с двумя противоположными конвейерными лентами, которые обеспечивают приложение давления к противоположным сторонам ступенчато уложенных групп.
Для объединения двух ступенчато уложенных групп, группы обычно подают вдоль соответствующих отдельных систем ленточных конвейеров и обеспечивают их объединение в зоне, которая является общей для обеих систем и в которой обеспечивается объединение двух групп в одну.
Например, на фиг.1А и 1В показаны последовательные стадии при работе системы транспортировки, предназначенной для перемещения групп ступенчато уложенных почтовых отправлений вдоль соответствующих траекторий перемещения вперед. Более точно, каждая траектория перемещения вперед содержит ряд участков, каждый из которых по меньшей мере частично образован соответствующей системой с одним или двумя ленточными конвейерами.
Как предусмотрено в показанном примере, системы с двумя ленточными конвейерами обычно используются вдоль участков траектории перемещения вперед, расположенных в вертикальном направлении или, тем не менее, имеющих крутой уклон.
При обработке групп ступенчато уложенных почтовых отправлений обычно необходимо объединить две группы в одну группу большей величины. В этом случае, на практике две или более траекторий сходятся в заданной зоне пересечения и, следовательно, начиная от данного места, совпадают независимо от геометрических характеристик траекторий. В любом случае, при наклонных осях сходящихся траекторий, по меньшей мере, одна из групп ступенчато уложенных отдельных предметов должна постоянно перемещаться вдоль криволинейной траектории или во всяком случае вдоль траектории, предусматривающей изменение направления перемещения вперед.
В частности, необходимость объединения групп ступенчато уложенных отдельных предметов обусловлена технологическими требованиями, например, наличием - вдоль траектории перемещения вперед - устройств для обработки (например, сортировки) почты или определенных устройств для транспортировки или изменения направления, которые требуют, чтобы подача поступающих почтовых отправлений была как можно более постоянной и поступающие подаваемые почтовые отправления были как можно более однородными, как для обеспечения устойчивой работы отдельных устройств, так и - в более общем случае - для достижения высокой производительности системы транспортировки в целом.
Объединение двух групп ступенчато уложенных почтовых отправлений на практике создает различные потенциальные проблемы.
Группа, получающаяся в результате объединения двух групп ступенчато уложенных отдельных предметов, может, например, заканчиваться в зоне, в которой две группы соединяются, в виде группы с меньшей толщиной по отношению к средней толщине любой из двух групп ступенчато уложенных отдельных предметов (см. фиг.2).
Этого следует избегать любыми средствами, поскольку это в конце концов может привести к полному разделению объединенной группы, например, при ее перемещении в другую часть системы транспортировки и в особенности в случае расположения двух последовательных участков траектории на разных уровнях. Кроме того, если объединенная группа будет иметь большую длину по сравнению с той, которую она должна иметь (вследствие провисания в месте соединения), это может привести к снижению эффективности системы транспортировки в целом. В завершение, неравномерность, описанная выше, может привести к снижению общей производительности устройств для обработки (например, сортировки) почтовых отправлений, что приводит к ошибкам в последовательности транспортировки и обработки почтовых отправлений.
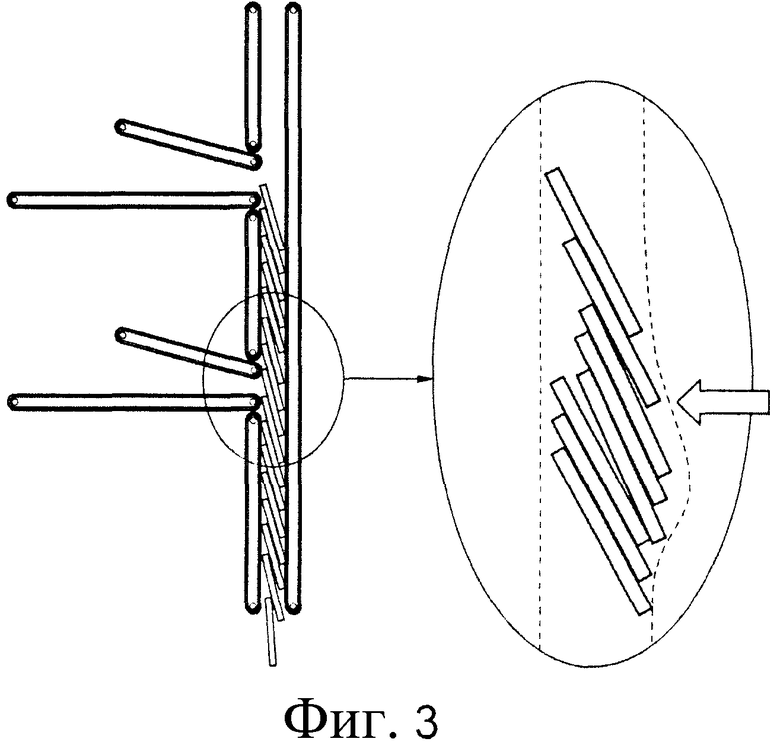
Напротив, зона в объединенной группе, в которой две группы соединяются, может увеличиваться по толщине по отношению к средней толщине каждой из двух групп ступенчато уложенных отдельных предметов (как показано на фиг.3).
Данной ситуации также следует избегать, поскольку она приводит к растяжению удерживающих поверхностей (то есть противоположных поверхностей системы транспортировки с двумя ленточными конвейерами, между которыми перемещается группа). Когда удерживающие поверхности перемещаются в сторону друг от друга, контакт между удерживающими поверхностями и имеющими меньшую толщину частями группы может быть утерян, в результате чего почтовые отправления на данных участках сплющиваются и больше не будут транспортироваться стабильно и контролируемым образом посредством системы ленточных конвейеров.
Следовательно, больше не гарантируется правильная последовательность почтовых отправлений в объединенной группе, то есть почтовые отправления, исходно находившиеся во второй группе, могут оказаться расположенными дальше впереди, чем почтовые отправления, исходно находившиеся в первой группе. Кроме того, неравномерность/неровность описанного выше типа может привести к блокировке устройств для обработки (например, сортировки) почты.
Другой фактор, влияющий на объединение двух групп ступенчато уложенных почтовых отправлений, - это прямое следствие того, что по меньшей мере одна из групп должна перемещаться вдоль криволинейной траектории или во всяком случае изменять направление на ее пути к месту пересечения.
Каждая группа ступенчато уложенных почтовых отправлений является довольно толстой, так что когда она перемещается вдоль кривой или изменяет направление, поверхность группы с внутренней стороны кривой перемещается со скоростью (скоростью vi), отличающейся от скорости перемещения поверхности с наружной стороны кривой (скорости ve), как показано на фиг.4.
В результате наличия данного различия в скорости будет иметь место изменение, то есть увеличение или уменьшение, среднего интервала между почтовыми отправлениями в группе в зависимости от геометрических характеристик системы транспортировки и относительных траекторий.
Поскольку данное изменение интервала обычно не будет полностью скорректировано, когда группа снова окажется на прямолинейной траектории, часто отмечается небольшое увеличение или уменьшение длины группы. В случае отсутствия коррекции данное изменение длины группы может привести к снижению точности, с которой более длинная/более короткая группа будет объединяться с другой группой.
Следовательно, требуется простой эффективный способ коррекции данного эффекта увеличения/уменьшения длины группы при перемещении группы вдоль криволинейной траектории или по меньшей мере вдоль траектории, предусматривающей изменение направления.
Следовательно в данной отрасли существует потребность в способе и системе транспортировки и объединения сходящихся групп ступенчато уложенных почтовых отправлений, которые обеспечивают возможность устранения в целом вышеуказанных недостатков.
Более конкретно, ощущается потребность в системе транспортировки и объединения групп ступенчато уложенных почтовых отправлений такого типа, которая содержит некоторое число систем ленточных конвейеров, образующих одну или несколько траекторий перемещения групп вперед, обеспечивает эффективное объединение групп при отсутствии провисания или разбухания и, в случае необходимости, обеспечивает корректировку любого расширения или сужения групп.
Следовательно, задача настоящего изобретения состоит в разработке простых и недорогих способа и системы транспортировки и объединения групп ступенчато уложенных почтовых отправлений, которые обеспечивают возможность удовлетворения по меньшей мере одной из вышеуказанных потребностей.
Вышеуказанная задача решается посредством настоящего изобретения за счет того, что в соответствии с ним разработаны способ транспортировки и объединения групп ступенчато уложенных почтовых отправлений по пункту 1 формулы изобретения и система по пункту 8 формулы изобретения.
Предпочтительный неограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера со ссылкой на сопровождающие чертежи, на которых:
фиг.1А, 1В и 1С показывают схематические изображения системы для транспортировки групп ступенчато уложенных почтовых отправлений на трех последовательных стадиях;
фиг.2 и 3 показывают схематические изображения двух явлений (провисания и «разбухания» группы, образованной посредством объединениях двух групп ступенчато уложенных почтовых отправлений), для устранения которых предназначен способ в соответствии с настоящим изобретением;
фиг.4 показывает схематическое изображение явления отклонения (расширения/сужения группы ступенчато уложенных почтовых отправлений), которое должен компенсировать способ в соответствии с настоящим изобретением;
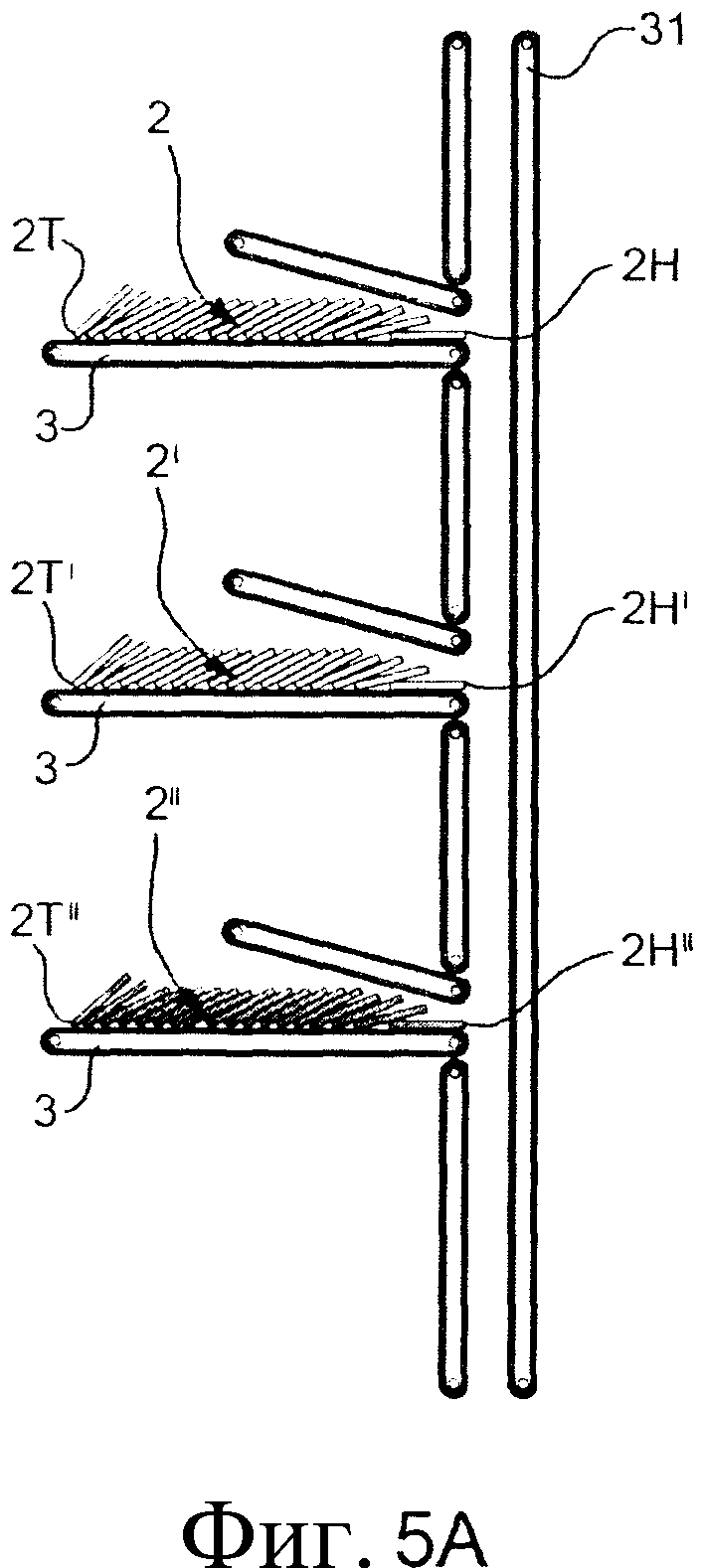
фиг.5А, 5В, 5С показывают схематические изображения трех последовательных стадий при объединении более двух групп ступенчато уложенных почтовых отправлений посредством использования способа в соответствии с настоящим изобретением;
фиг.6 показывает один вариант осуществления способа транспортировки и объединения групп ступенчато уложенных почтовых отправлений в соответствии с настоящим изобретением.
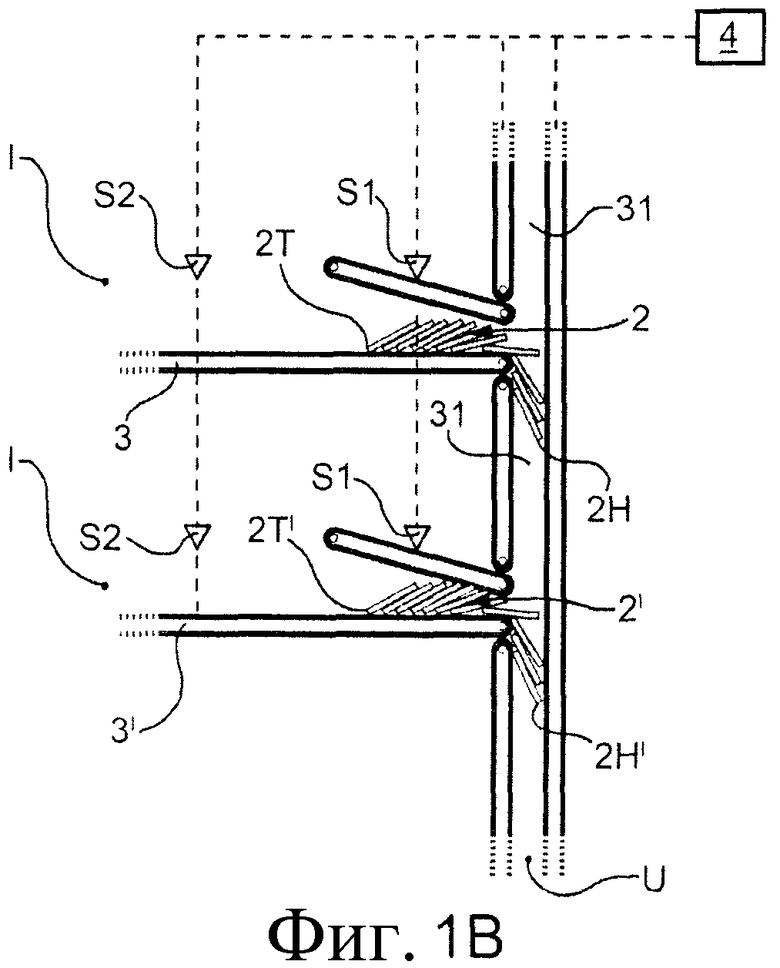
Ссылочная позиция 1 на фиг.1А, 1В и 1С обозначает в целом систему для транспортировки и объединения групп 2, 2' ступенчато уложенных почтовых отправлений на следующих друг за другом стадиях работы.
Каждая группа 2, 2' содержит некоторое количество почтовых отправлений, выровненных в предпочтительно прямом направлении, частично перекрывающихся и имеющих соответствующие края, расположенные на постоянном или переменном расстоянии друг от друга. Более точно, каждая группа 2, 2' имеет головную часть 2Н, 2Н' (или переднюю часть в направлении перемещения группы) и хвостовую часть 2Т, 2Т' (или заднюю часть в направлении перемещения группы), и общее расстояние между головной частью и хвостовой частью каждой группы 2, 2' определяет ее длину.
Система 1, в частности, предназначена для перемещения групп 2, 2' ступенчато уложенных почтовых отправлений, образованных известным образом, вдоль соответствующих траекторий перемещения вперед, каждая из которых по меньшей мере частично образована одной или несколькими механизированными системами 3, 3', 31, 31' транспортировки с одним или двумя ленточными конвейерами.
Система 1, как правило, содержит некоторое количество систем 3, 3', 31, 31' ленточных конвейеров, которые простираются между соответствующими концевыми шкивами, выполненными с возможностью образования опорных поверхностей, на которых ступенчато уложенные группы перемещаются со скоростью v от соответствующих мест I ввода до общего места U выхода. Система 1 предпочтительно содержит системы 31, 31' с двумя ленточными конвейерами вдоль вертикальных или имеющих крутой уклон участков траектории.
Известные электродвигатели и передачи для приведения в действие систем 3, 3' ленточных конвейеров не показаны для простоты.
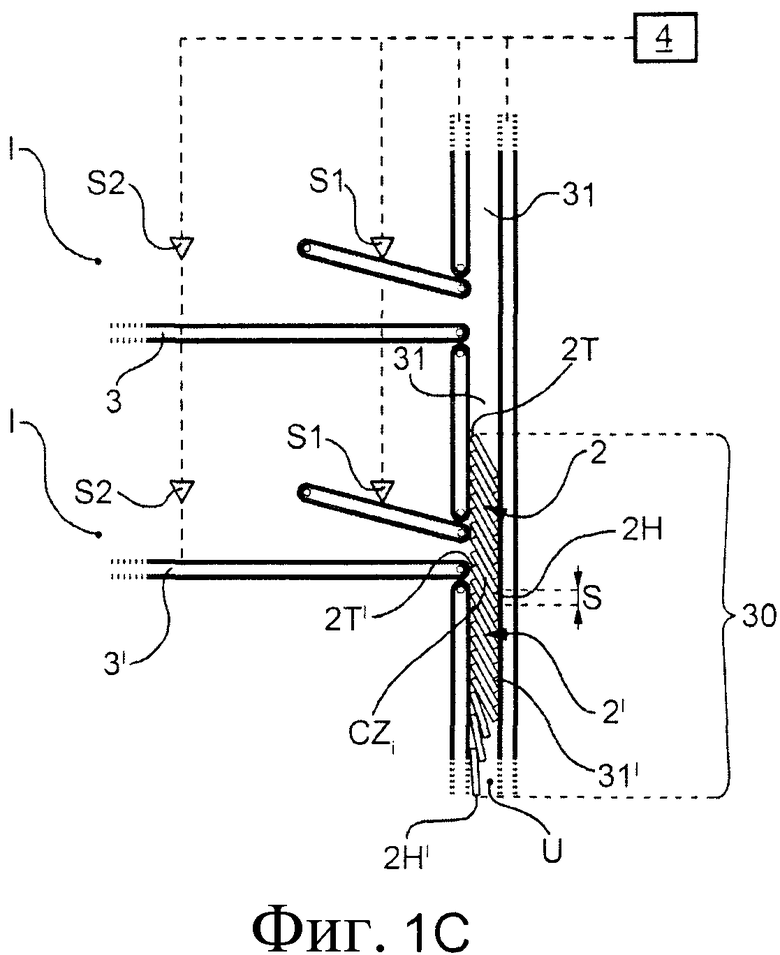
Более точно, система 1 выполнена с конфигурацией, обеспечивающей возможность объединения по меньшей мере одной (i-1)-й группы 2 ступенчато уложенных почтовых отправлений с i-й группой 2' ступенчато уложенных почтовых отправлений в зоне CZi пересечения, к которой (i-1)-я и i-я группы 2, 2' перемещаются вдоль соответствующих траекторий.
В примере по фиг.1А система 1 обеспечивает перемещение (i-1)-й группы 2 с длиной Li-1, головная часть 2Н которой исходно расположена в точке Р(i-1)0 на первой системе 3 ленточных конвейеров, и i-й группы 2' с длиной Li, головная часть 2Н' которой расположена в точке Pi0 на второй системе 3' ленточных конвейеров.
В тот момент времени, к которому относится фиг.1А, для достижения зоны CZi пересечения (i-1)-я группа 2 должна переместиться вдоль участка траектории, который имеет длину D(i-1) и который предусматривает изменение направления. Таким образом, помимо первой системы 3, на которой (i-1)-я группа 2 будет расположена в начальный момент времени, показанный на фиг.1А, (i-1)-я группа 2, следовательно, также будет перемещена посредством первой системы 31 с двумя ленточными конвейерами, расположенной рядом с первой системой 3 и простирающейся по существу в вертикальном направлении.
Аналогичным образом, для достижения зоны CZi пересечения, i-я группа 2' должна переместиться вдоль участка траектории, который имеет длину Di, с последующим изменением направления. Таким образом, помимо второй системы 3', на которой i-я группа 2' будет расположена в момент времени, показанный на фиг.1А, i-я группа 2', следовательно, также будет перемещена посредством второй системы 31' с двумя ленточными конвейерами, расположенной рядом со второй системой 3' и простирающейся по существу в вертикальном направлении.
Система 1 предпочтительно содержит первые сенсорные средства S1, например, фотоэлементы, лазерные датчики, датчики приближения и т.д., расположенные вдоль траекторий перемещения (i-1)-й и i-й групп 2, 2' для обнаружения прохождения головных частей 2Н, 2Н'.
Таким образом, точные исходные положения Р(i-1)0, Pi0 групп 2, 2' могут быть рациональным образом определены посредством использования моделей движения (например, уравнений движения в пространстве в зависимости от времени), предпочтительно на основе сигналов от сенсорных средств S1 при прохождении головок 2Н, 2Н'.
Точные длины Li-1, Li групп 2, 2' могут быть рациональным образом определены на основе известных параметров (размера средств, расстояния между средствами и т.д.) почтовых отправлений в группах.
Система 1 предпочтительно также содержит вторые сенсорные средства S2, например, фотоэлементы, лазерные датчики, датчики приближения и т.д., расположенные вдоль траекторий перемещения групп 2, 2' для обнаружения прохождения хвостовых частей 2Т, 2Т'.
На основе сигналов от сенсорных средств S2, указывающих на прохождение хвостовых частей 2Т, 2Т', и сигналов от сенсорных средств S1, указывающих на прохождение головных частей 2Н, 2Н', и при заданной скорости v перемещения групп 2, 2' вдоль соответствующих систем 3, 3' ленточных конвейеров точная длина Li-1, Li каждой группы 2, 2' может быть определена в любой момент времени.
Система 1 предпочтительно также содержит дополнительные сенсорные средства (непоказанные), например, оптические барьеры, фотоэлементы, лазерные датчики и т.д., для определения длины LU последнего почтового отправления в каждой группе 2, 2'. В альтернативном варианте длина LU последнего почтового отправления в каждой группе может быть принята по существу постоянной и равной заданной величине.
Система 1 предпочтительно содержит управляющее устройство 4, которое функционально соединено с по меньшей мере первыми сенсорными средствами S1 и соответствующими приводными средствами (непоказанными) систем 3, 3', 31, 31' ленточных конвейеров и которое предназначено для запуска и останова систем 3, 3', 31, 31' ленточных конвейеров на основе по меньшей мере исходных положений Р(i-1)0, Pi0 головных частей 2Н, 2Н' и длин Li-1, Li (i-1)-й и i-й групп 2, 2' ступенчато уложенных почтовых отправлений так, что передний край (i-1)-й группы 2 будет по меньшей мере перекрывать задний край i-й группы 2' в одной объединенной группе 30 ступенчато уложенных почтовых отправлений в соответствующей зоне CZ1 пересечения. Управляющее устройство 4 также предпочтительно обеспечивает запуск и останов систем 3, 3', 31, 31' ленточных конвейеров на основе длин LU(i-1), LUi соответствующих последних отдельных предметов в (i-1)-й и i-й группах.
Управляющее устройство 4 также предпочтительно функционально соединено со вторыми сенсорными средствами S2.
Заданное состояние, в котором две группы ступенчато уложенных почтовых отправлений перекрываются и идеально объединены, как описано выше, показано на фиг.1С.
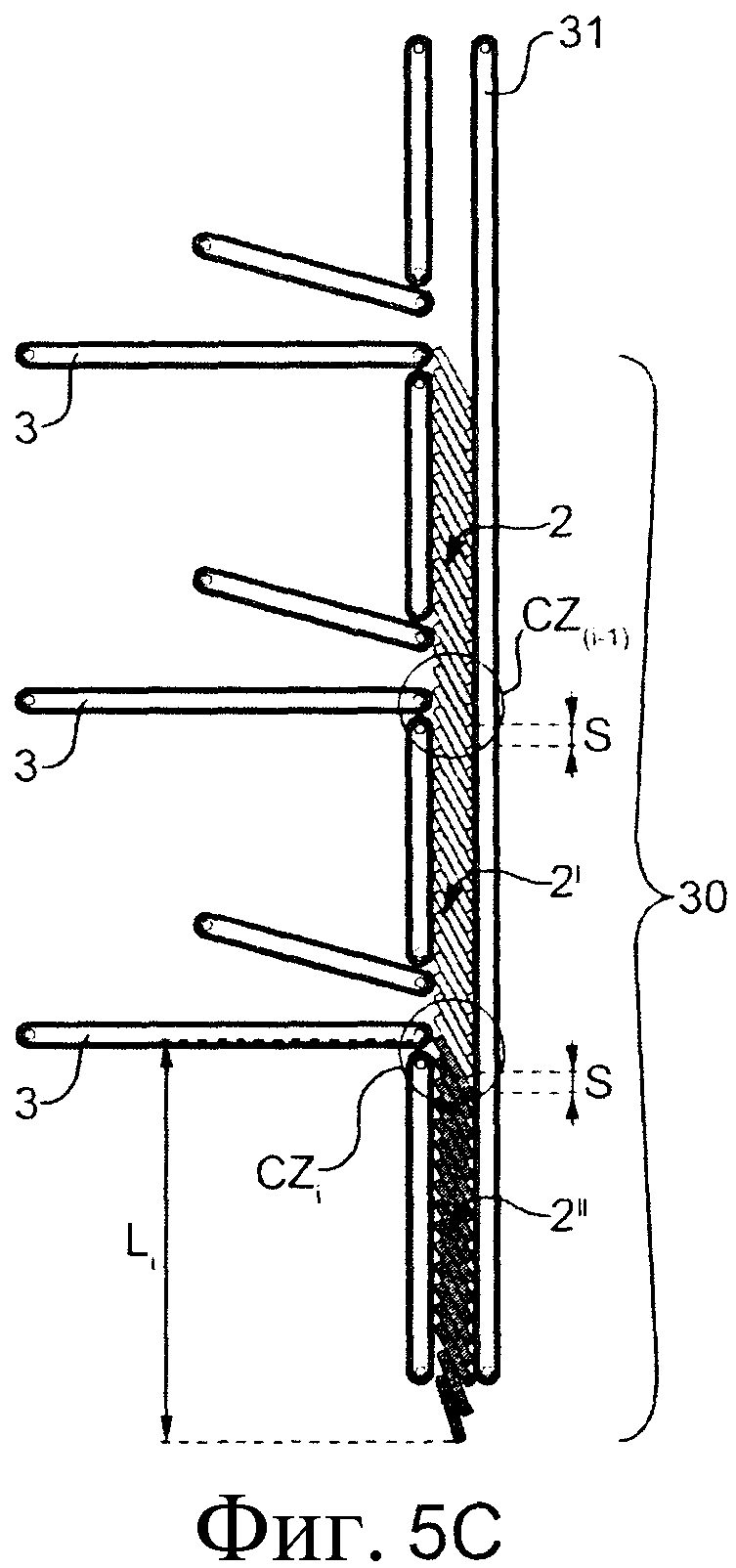
Аналогичным образом, фиг.5С показывает заданное состояние перекрытия и объединения некоторого числа групп ступенчато уложенных почтовых отправлений в одну объединенную группу 30, по существу включающую в себя соседние группы 2, 2', 2”, объединенные попарно, при этом передний край (i-1)-й группы будет по меньшей мере перекрывать задний край i-й группы. В сущности, каждая группа характеризуется длиной Li и исходным положением Pi0 ее головной части и исходно расположена на расстоянии Di от соответствующей зоны CZi пересечения с (i-1)-й группой.
Как будет очевидно из нижеприведенного описания, посредством применения способа в соответствии с изобретением для в конечном счете соседних пар групп ступенчато уложенных почтовых отправлений можно образовать объединенную несколько раз группу 30 показанного на фиг.5С типа.
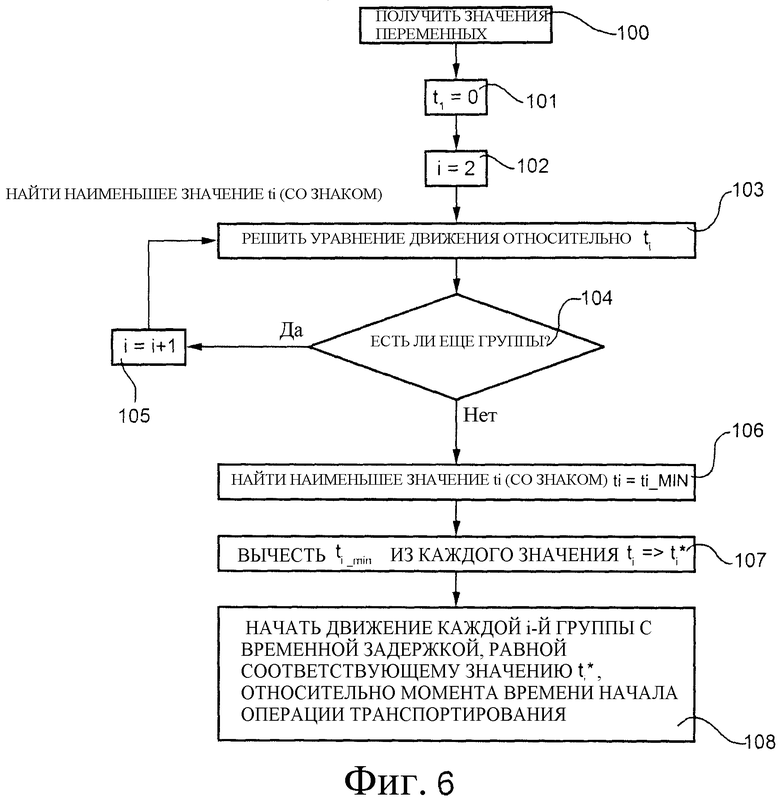
Фиг.6 показывает более подробно операции, выполняемые управляющим устройством 4 для обеспечения перемещения двух или более групп 2, 2' ступенчато уложенных почтовых отправлений в соответствующие зоны CZi пересечения, то есть для управления запуском и остановом систем 3 ленточных конвейеров для группы.
Сначала в блоке 100 управляющее устройство 4 определяет по меньшей мере исходное положение Pi0 головной части 2Н' каждой i-й группы ступенчато уложенных почтовых отправлений, подлежащей перемещению и объединению, и соответственно определяет длину Li i-й группы и расстояние Di от соответствующей зоны CZi пересечения с соответствующей (i-1)-й группой.
Аналогичным образом, управляющее устройство 4 предпочтительно определяет фактическое исходное положение хвостовой части 2Т' и соответственно также рассчитывает длину Li.
Другими словами, предполагается, что группы 2, 2' исходно являются неподвижными на соответствующих системах ленточных конвейеров.
Далее, в блоке 101 управляющее устройство временно обнуляет момент t1 времени начала движения первой группы.
Другими словами, в блоке 101 по существу предполагается, что первая группа в последовательности групп, подлежащих объединению, представляет собой группу, которая должна быть первой приведена в движение. Как разъяснено ниже, способ в соответствии с изобретением обеспечивает (непрямым образом) определение истинности данного предположения и, если оно будет опровергнуто, обеспечивает корректировку последовательности, в которой различные группы будут приведены в движение.
Далее, в блоке 102 управляющее устройство 4 присваивает счетчику i значение 2 и в блоке 103 решает относительно переменной ti уравнение движения i-й и (i-1)-й групп, которое определяет условия, при которых в заданный последующий момент tmerge времени будет осуществлено перекрытие/объединение двух групп в зоне CZi пересечения, как показано на фиг.1С (или фиг.5С в случае более чем двух групп). Для этого управляющее устройство 4 принимает во внимание значения переменных, определенные в блоке 100.
Группы, подлежащие перемещению и объединению, предпочтительно подвергаются переводу в заданное состояние перекрытия/объединения, при котором головная часть 2Н (i-1)-й группы будет перекрывать хвостовую часть 2Т' i-й группы таким образом, что она будет отставать от головной части последнего почтового отправления в i-й группе на расстояние S, равное среднему интервалу между ступенчато уложенными почтовыми отправлениями в каждой группе.
Данное соотношение математически выражается следующим уравнением:
Р(i-1)_merge+S=Pi_merge (1)
в котором:
- Р(i-1)_merge - положение головной части (i-1)-й группы в момент объединения;
- Pi_merge - положение хвостовой части i-й группы в момент объединения;
- S - средний интервал (известный заранее) между ступенчато уложенными почтовыми отправлениями в каждой группе.
Выражения для расчета положения головной части/хвостовой части каждой группы в момент объединения могут быть подставлены в уравнение (1).
Это дает следующее уравнение движения (i-1)-й и i-й групп:
Р(i-1)0-D(i-1)+v(tmerge-t(i-1))+S=Pi0-Li+LUi-Di+v(tmerge-ti) (2)
в котором:
- Р(i-1)0 - исходное положение головной части 2Н (i-1)-й группы;
- D(i-1) - исходное расстояние между головной частью 2Н (i-1)-й группы и зоной CZi пересечения с i-й группой;
- t(i-1) - момент времени начала движения (i-1)-й группы;
- Pi0 - исходное положение головной части 2Н' i-й группы;
- Li - длина i-й группы;
- LU(i-1) - длина последнего отдельного предмета в (i-1)-й группе;
- Di - исходное расстояние между головной частью 2Н' i-й группы и зоной CZi пересечения с (i-1)-й группой;
- ti - момент времени начала движения i-й группы;
- v - скорость перемещения систем 3, 3' ленточных конвейеров;
- S - средний интервал между ступенчато уложенными почтовыми отправлениями в группах 2, 2'.
Средний интервал между ступенчато уложенными почтовыми отправлениями в группах 2, 2' обычно может быть использован для определения S, но в некоторых случаях - например, когда группы 2, 2' также содержат особенно толстые отдельные предметы, - это может оказаться неточным и может привести к снижению эффективности способа.
Для предотвращения этого в альтернативном варианте осуществления обеспечивается заданное состояние перекрытия/объединения, в котором головная часть 2Н (i-1)-й группы будет перекрывать хвостовую часть 2Т' i-й группы таким образом, чтобы обеспечить отставание от головной части последнего почтового отправления в i-й группе на расстояние S* на основе измеренных размеров (как правило, длины и толщины) двух отдельных предметов, в конце концов входящих в непосредственный контакт в месте соединения. Соответственно, система 1 может предпочтительно содержать третьи сенсорные средства (непоказанные) для определения фактической толщины головной части 2Н, 2Н' и/или хвостовой части 2Т, 2Т' (i-1)-й и i-й групп.
Следует отметить, что элемент Pi0-Li+LUi в уравнении (2) выражает исходное положение головной части последнего отдельного предмета в i-й группе.
При условии, что значение t(i-1) будет задано или рассчитано заранее и все остальные количественные значения (то есть заданные заранее в качестве рабочих параметров системы 1 или измеренные описанными датчиками, или рассчитанные/оцененные исходя из полученных значений) будут известны, уравнение (2) может быть легко решено относительно переменной ti.
Другими словами, каждое значение ti характеризует момент времени начала движения i-й группы, определенный относительно ранее определенного момента ti-1 времени начала движения (i-1)-й группы, то есть абсолютная алгебраическая разница между ними представляет собой запаздывание по времени, с которым i-я группа должна начинать движение, по отношению к началу движения (i-1)-й группы, для правильного объединения двух групп, как предусмотрено настоящим изобретением.
В том случае, когда траектория перемещения i-й группы предусматривает изменение направления, уравнение (2) предпочтительно модифицировано (см. уравнение (3) ниже) посредством ввода корректирующего члена для компенсации расширения/удлинения, которое, как правило, имеет место, когда группа изменяет направление. В этом случае исходное положение хвостовой части 2Т' i-й группы будет задано не выражением Pi0-Li+LUi, а соответствующим модифицированным членом (Pi0-Li+LUi)MOD.
Математически модифицированное значение исходного положения i-й группы, изменяющей направление, может быть рассчитано посредством использования уравнения:
(Pi0-Li)MOD=Pi0-(Li-LUi] KS (3)
в котором:
- Li - исходная длина i-й группы;
- LUi - длина последнего отдельного предмета в i-й группе;
- KS - коэффициент расширения/сужения группы.
Значение коэффициента KS расширения/сжатия группы в основном зависит от геометрических характеристик системы 1 и толщины группы. Например, может быть принято значение коэффициента KS, равное приблизительно 1,05-1,10, когда геометрические характеристики системы 1 вызывают расширение/удлинение группы.
В блоке 104 управляющее устройство определяет, имеются ли какие-либо другие группы, подлежащие транспортированию и объединению. Это выполняется известным образом, например, посредством использования оптоэлектронного датчика (S1), образующего оптический путь, который прерывается любыми почтовыми отправлениями.
В случае утвердительного ответа, осуществляется переход от блока 104 к блоку 105, в котором управляющее устройство 4 увеличивает значение счетчика i на одну единицу и затем возвращается к блоку 103.
Напротив, в случае отрицательного ответа, управляющее устройство 4 переходит к блоку 106, в котором оно осуществляет поиск минимального момента ti_MIN времени начала движения из всех определенных моментов ti времени начала движения.
В следующем блоке 107 управляющее устройство 4 вычитает минимальный момент ti_MIN времени начала движения из каждого момента ti времени начала движения для вычисления скорректированных значений моментов ti* времени начала движения в соответствии с уравнением:
ti*=ti-ti_MIN (4)
Следует отметить, что каждый момент ti времени начала движения может быть больше нуля, меньше нуля или равен нулю. Более точно, ti_MIN может быть больше нуля, меньше нуля или равен нулю, так что операция, выполняемая в блоке 107, представляет собой алгебраическое вычитание (при котором учитывается знак величины ti_MIN).
Другими словами, если все значения ti моментов времени начала движения являются положительными или нулевыми, в блоке 107 обеспечивается оставление их неизмененными, то есть каждое значение ti*=ti.
В альтернативном случае, если по меньшей мере одно из значений моментов ti времени начала движения является отрицательным, управляющее устройство 4 определяет отрицательный момент времени начала движения с наибольшей абсолютной величиной и вычитает его алгебраически из всех значений моментов времени начала движения для их «нормализации». Другими словами, после блока 107 все значения ti моментов времени начала движения будут «скорректированы» так, что ни одно из них не будет иметь отрицательного знака. Действительно, минимальное значение ti момента времени начала движения заменяется соответствующим нулевым значением ti момента времени начала движения, и группа почтовых отправлений, ассоциируемая с данным моментом времени начала движения, будет перемещена первой, как разъяснено ниже.
В завершение, в блоке 108 управляющее устройство 4 обеспечивает выполнение операции транспортирования и объединения посредством перемещения каждой i-й группы в скорректированные моменты ti* времени начала движения, рассчитанные в блоке 107. Другими словами, каждая i-я группа начинает двигаться с запаздыванием по времени, равным соответствующему модифицированному моменту ti* времени начала движения, относительно момента tSTART времени начала операции транспортирования и объединения.
Другими словами, управляющее устройство запускает некоторое число таймеров, каждый из которых будет связан с инициированием движения i-й группы ступенчато уложенных почтовых отправлений.
Соответственно, управляющее устройство 4 обеспечивает перемещение систем 3, 3' ленточных конвейеров вдоль соответствующих траекторий к соответствующим зонам пересечения с соответствующими временными задержками, равными скорректированным значениям ti* моментов времени начала движения, относительно момента времени начала операции транспортирования и объединения.
Следует отметить, что в примере, описанном со ссылкой на чертежи и уравнения (1) и (2) движения - возможно, с корректировкой в уравнении (3), системы 3, 3' ленточных конвейеров обеспечивают перемещение всех соответствующих групп ступенчато уложенных почтовых отправлений с одинаковой постоянной скоростью v.
Тем не менее, очевидно, что уравнения (1) и (2) могут быть скорректированы для обеспечения возможности перемещения с непостоянной скоростью.
Например, элемент, соответствующий постоянной скорости v, в уравнениях (1) и (2) может быть заменен заданной функцией vi(t), описывающей или по меньшей мере аппроксимирующей зависимость скорости головной части 2Н' каждой i-й группы от времени, для учета ускорения и замедления группы вдоль соответствующей траектории.
В вышеприведенном описании предполагается, что все участки траекторий, каждый из которых образован одной или несколькими механизированными системами 3, 3', 31, 31' ленточных конвейеров с одним или двумя ленточными конвейерами, свободны в начале реально выполняемой операции транспортирования и объединения, в то время как в действительности это, очевидно, не всегда будет так, то есть довольно часто по меньшей мере одна из механизированных систем 3, 3', 31, 31' будет временно недоступной из-за того, что она уже будет занята другой группой, находящейся в процессе перемещения, или зона CZi пересечения будет временно занята.
Это может быть принято во внимание в варианте способа согласно изобретению, в котором временную задержку ri добавляют к скорректированным значениям ti* моментов времени начала движения, рассчитанным в блоке 107, в зависимости от занятого/свободного состояния соответствующего участка траектории, то есть соответствующей механизированной системы 3, 3', 31, 31' ленточных конвейеров с одним или двумя ленточными конвейерами.
Другими словами, каждая группа, в частности, группа с наименьшим скорректированным значением ti* момента времени начала движения, будет приведена в движение с временной задержкой ri относительно соответствующего скорректированного момента времени начала движения для обеспечения возможности освобождения/очистки соответствующей траектории.
Соответственно, система 1 в соответствии с изобретением предпочтительно может включать в себя средства определения доступности (непоказанные), например, фотоэлементы, которые предназначены для мгновенного определения занятого/свободного состояния критических участков траектории и которые предпочтительно расположены в зонах CZi пересечения, образованных в системе 1.
Преимущества способа транспортирования и объединения и системы в соответствии с изобретением будут очевидными из вышеприведенного описания.
В частности, способ в соответствии с изобретением несомненно обеспечивает простым, недорогим образом объединение двух или более групп ступенчато уложенных почтовых отправлений в одну с высокой степенью точности, надежности и повторяемости, что, как правило, требуется в сфере обработки почтовых отправлений.
Кроме того, поскольку группы ступенчато уложенных почтовых отправлений, подлежащие объединению, приводятся в движение с последовательностью моментов времени начала движения, которая учитывает по меньшей мере исходное положение и фактическую длину групп, способ согласно изобретению позволяет предотвратить провисание и разбухание объединенных групп в месте соединения, что часто происходит в менее точных системах.
Другое важное обстоятельство, которое следует отметить, - это то, каким образом способ и система для транспортирования и объединения в соответствии с изобретением также позволяют учитывать геометрические характеристики системы 1 и, в частности, любое изменение направления и обусловленное им расширение/удлинение групп, которое может быть рациональным образом компенсировано посредством адаптации уравнения движения групп к реальным характеристикам соответствующих траекторий.
Несомненно, могут быть выполнены изменения способа и системы для транспортирования и объединения, описанных и проиллюстрированных в настоящем описании, тем не менее, без отхода от объема защиты, определяемого сопровождающими независимыми пунктами формулы изобретения.



Изобретение относится к способу и системе для транспортировки и объединения двух или более групп ступенчато уложенных почтовых отправлений. Способ транспортирования и объединения включает следующие этапы: а) транспортирование указанных (i-1)-й и i-й групп (2, 2'), начиная с начального момента (tSTART) времени, вдоль соответствующих траекторий перемещения вперед к указанной зоне (CZi) пересечения; b) определение, для каждой группы (2, 2') по меньшей мере положения (Р(i-1)0, Pi0) ее головной части (2Н, 2Н') в указанный начальный момент (tSTART) времени и длины Li i-й группы (2'); и с) регулирование начала движения каждой группы (2, 2') к указанной зоне (CZi) пересечения в зависимости от по меньшей мере указанного положения (Р(i-1)0, Pi0) ее головной части (2Н, 2Н') в указанный начальный момент (tSTART) времени и указанной длины Li-1, Li так, чтобы передний край указанной (i-1)-й группы (2) перекрывал, по меньшей мере частично, задний край указанной i-й группы (2') для образования одной объединенной группы (30) в указанной зоне (CZi) пересечения. Техническим результатом изобретения является создание простого эффективного способа коррекции эффекта увеличения/уменьшения длины группы. 2 н. и 11 з.п. ф-лы, 6 ил.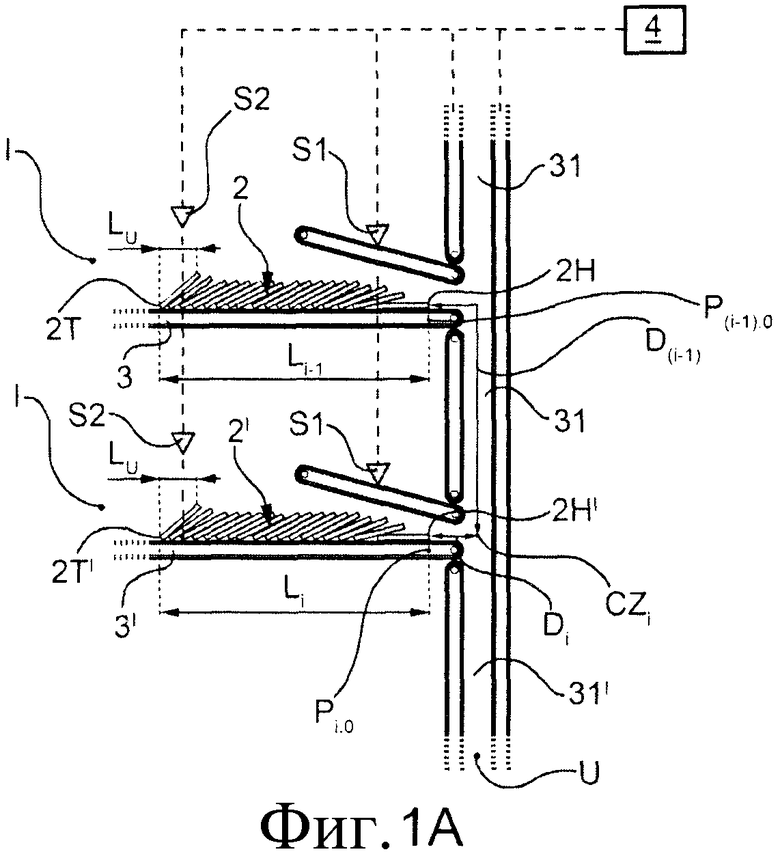
1. Способ транспортирования и объединения - в соответствующей зоне (CZi) пересечения - по меньшей мере одной (i-1)-й группы (2) ступенчато уложенных почтовых отправлений с i-й группой (2') ступенчато уложенных почтовых отправлений, при этом способ включает следующий этап:
а) транспортирование указанных (i-1)-й и i-й групп (2, 2'), начиная с начального момента (tSTART) времени, вдоль соответствующих траекторий перемещения вперед к указанной зоне (CZi) пересечения,
отличающийся тем, что он включает следующие этапы:
b) определение, для каждой группы (2, 2') ступенчато уложенных почтовых отправлений, подлежащих транспортированию и объединению, по меньшей мере положения (Р(i-1)0, Pi0) ее головной части (2Н, 2Н') в указанный начальный момент (tSTART) времени и длины Li i-й группы (2'); и
с) регулирование начала движения каждой группы (2, 2') к указанной зоне (CZi) пересечения в зависимости от по меньшей мере указанного положения (Р(i-1)0, Pi0) ее головной части (2Н, 2Н') в указанный начальный момент (tSTART) времени и указанной длины Li-1, Li так, чтобы передний край указанной (i-1)-й группы (2) перекрывал, по меньшей мере частично, задний край указанной i-й группы (2') для образования одной объединенной группы (30) ступенчато уложенных почтовых отправлений в указанной зоне (CZi) пересечения.
2. Способ по п.1, в котором этап с) регулирования начала движения каждой группы (2, 2') к зоне (CZi) пересечения включает следующие этапы:
d) вычисление (103) момента (ti) времени начала движения для каждой группы (2, 2') по меньшей мере на основе указанного положения (Р(i-1)0, Pi0); и
е) обеспечение начала движения каждой группы (2, 2') с временной задержкой (ti*) относительно указанного начального момента (tSTART) времени, рассчитанной исходя из указанного момента (ti) времени начала движения.
3. Способ по п.2, в котором указанный момент (ti) времени начала движения i-й группы также рассчитывают, исходя из:
- положения (Р(i-1)0) головной части (2Н) (i-1)-й группы в указанный начальный момент (tSTART) времени;
- расстояния Di-1 в указанный начальный момент (tSTART) времени между головной частью (2Н) (i-1)-й группы и указанной зоной (CZi) пересечения с i-й группой;
- момента (t(i-1)) времени начала движения (i-1)-й группы;
- расстояния Di в указанный начальный момент (tSTART) времени между головной частью (2Н') i-й группы и указанной зоной (CZi) пересечения с (i-1)-й группой;
- скорости (v) перемещения указанных групп вдоль соответствующих им траекторий; и
- среднего интервала (S) между ступенчато уложенными почтовыми отправлениями в каждой группе (2, 2').
4. Способ по п.3, в котором указанные соответствующие моменты (ti-1, ti) времени начала движения указанной (i-1)-й группы и указанной i-й группы (2, 2') связаны уравнением:
Р(i-1)0-D(i-1)+v(tmerge-t(i-1))+S=Pi0-Li+LUi-Di+v(tmerge-ti),
в котором tmerge представляет собой момент, в который указанная (i-1)-я группа и указанная i-я группа (2, 2') объединяются в зоне (CZi) пересечения.
5. Способ по п.1 или 4, в котором для объединения групп указанный этап а) включает этап перекрывания головной частью (2Н) (i-1)-й группы (2) хвостовой части (2Т') i-й группы (2') так, что указанная головная часть (2Н) будет отставать от головной части последнего почтового отправления в i-й группе (2') на расстояние (S), равное среднему интервалу между ступенчато уложенными почтовыми отправлениями в каждой группе.
6. Способ по п.1 или 4, в котором для объединения групп указанный этап а) включает этап перекрывания головной частью (2Н) (i-1)-й группы (2) хвостовой части (2Т') i-й группы (2') так, что указанная головная часть (2Н) будет отставать от переднего края последнего почтового отправления в i-й группе (2') на расстояние (S*), определенное исходя из измеренных размеров головной части (2Н) (i-1)-й группы (2) и хвостовой части (2Т') i-й группы (2').
7. Способ по п.2, в котором указанный этап е) обеспечения начала движения каждой i-й группы включает следующие этапы:
f) определение минимального значения (ti_MIN) момента времени начала движения из всех рассчитанных моментов (ti) времени начала движения; и
g) вычисление скорректированного значения (ti*) момента времени начала движения для каждой i-й группы посредством вычитания указанного минимального значения (ti_MIN) момента времени начала движения алгебраически из соответствующего значения (ti) момента времени начала движения.
8. Способ по п.2, в котором указанный этап е) обеспечения начала движения каждой группы (2, 2') начинается с временной задержкой ri по отношению к соответствующему скорректированному значению (ti*) момента времени начала движения для обеспечения возможности очистки соответствующей траектории.
9. Способ по п.1, в котором для каждой i-й группы, траектория движения которой предусматривает изменение направления, значение указанного положения (Pi0) головной части (2Н') i-й группы в указанный начальный момент (tSTART) времени корректируют, исходя из коэффициента KS расширения/удлинения группы.
10. Система транспортирования и объединения, включающая в себя:
- некоторое число систем (3, 3'; 31, 31') конвейеров, предназначенных для транспортирования по меньшей мере одной (i-1)-й группы и одной i-й группы (2, 2') ступенчато уложенных почтовых отправлений вдоль соответствующих траекторий и объединения их в соответствующей зоне (CZi) пересечения;
- первые сенсорные средства (S1), расположенные вдоль траекторий движения указанных групп (2, 2') для обнаружения прохождения соответствующих головных частей (2Н, 2Н') групп (2, 2') и определения соответствующих положений (Р(i-1)0, Pi0) головных частей в начальный момент (tSTART) времени; и
- управляющее устройство (4), функционально соединенное с по меньшей мере первыми сенсорными средствами (S1) и с приводными средствами систем (3, 3', 31, 31') конвейеров и запрограммированное для управления перемещением каждой группы (2, 2') к указанной зоне (CZi) пересечения посредством использования способа по любому из пп.1-9.
11. Система по п.10, включающая в себя вторые сенсорные средства (S2), расположенные вдоль траекторий движения указанных групп (2, 2') для обнаружения прохождения соответствующих хвостовых частей (2Т, 2Т') групп (2, 2').
12. Система по п.10 или 11, включающая в себя третьи сенсорные средства, расположенные вдоль траекторий движения указанных групп (2, 2') для определения толщины соответствующих хвостовых частей (2Т, 2Т') и/или головных частей (2Н, 2Н') групп (2, 2').
13. Система по п.10 или 11, включающая в себя средства определения доступности, расположенные вдоль траекторий движения указанных групп (2, 2') для мгновенного определения занятого/свободного состояния соответствующих участков указанных траекторий.
| EP 0923997 A2, 23.06.1999 | |||
| Многоходовой клапан | 1979 |
|
SU804975A1 |
| US 5433325 A, 18.07.1995 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 25 И 26" (ВАРИАНТЫ) | 2002 |
|
RU2213603C1 |

