Изобретение относится к плавающим механическим средствам (игрушкам), в частности моделям, где при погружении в среду (воду) масса приобретает невесомость, и используется в учебно-познавательном процессе.
Данная заявка является развитием к заявкам 99117632/12 и 99117631/12.
Из уровня техники для предложенной "Машины Романова - Механический атом 25" выявлено средство того же назначения, раскрытое в описании к патенту РФ 2031685, кл. А 63 Н 23/10, 1995. Средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий жестко установленную на основании стойку, установленную на стояке с возможностью вращения посредством оси планку, несущую на себе малый электродвигатель, и контактную систему для подачи питания малому электродвигателю и большому электродвигателю.
Техническим результатом от предлагаемого изобретения является изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий жестко установленную на основании стойку, установленную на стойке с возможностью вращения посредством оси планку, несущую на себе малый электродвигатель, и контактную систему для подачи питания малому электродвигателю и большому электродвигателю, при этом малый и большой электродвигатели имеют фрикционные ролики, входящие в контактирование с пластиной, горизонтально и жестко закрепленной на основании, стойка закреплена в центре пластины, а большой электродвигатель расположен на планке шарнирно со стороны, противоположной малому электродвигателю, при этом контактирование ролика малого электродвигателя с пластиной осуществляется принудительно, а контактирование ролика большого электродвигателя с пластиной осуществляется от действия веса самого этого электродвигателя, и расстояние от оси до малого электродвигателя большее, чем расстояние от оси до большого электродвигателя, причем контактная система имеет контакты для каждого электродвигателя, расположенные так, что обеспечивают подачу электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o.
Из уровня техники для предложенной "Машины Романова - Механический атом 26" выявлено средство того же назначения, раскрытое в описании к патенту РФ 2031685, кл. А 63 Н 23/10, 1995. Средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий жестко установленную на основании стойку, установленную на стойке с возможностью вращения посредством оси планку, несущую на себе малый электродвигатель с шестеренкой, входящей в зацепление с большой шестерней, горизонтально и жестко соединенной с плавучим основанием, и контактную систему для подачи питания малому электродвигателю и большому электродвигателю.
Техническим результатом от предлагаемого изобретения является изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий жестко установленную на основании стойку, установленную на стойке с возможностью вращения посредством оси планку, несущую на себе малый электродвигатель с шестеренкой, входящей в зацепление с большой шестерней, горизонтально и жестко соединенной с плавучим основанием, и контактную систему для подачи питания малому электродвигателю и большому электродвигателю. Большой электродвигатель имеет фрикционный ролик, входящий в контактирование с большой шестерней, стойка закреплена в центре большой шестерни, а большой электродвигатель расположен на планке шарнирно со стороны, противоположной малому электродвигателю, при этом контактирование ролика большого электродвигателя с шестерней осуществляется от действия веса самого этого электродвигателя, и расстояние от оси до малого электродвигателя больше, чем расстояние от оси до большого электродвигателя, причем контактная система имеет контакты для каждого электродвигателя, расположенные так, что обеспечивают подачу электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o.
Сущность изобретения поясняется чертежами, где изображено на:
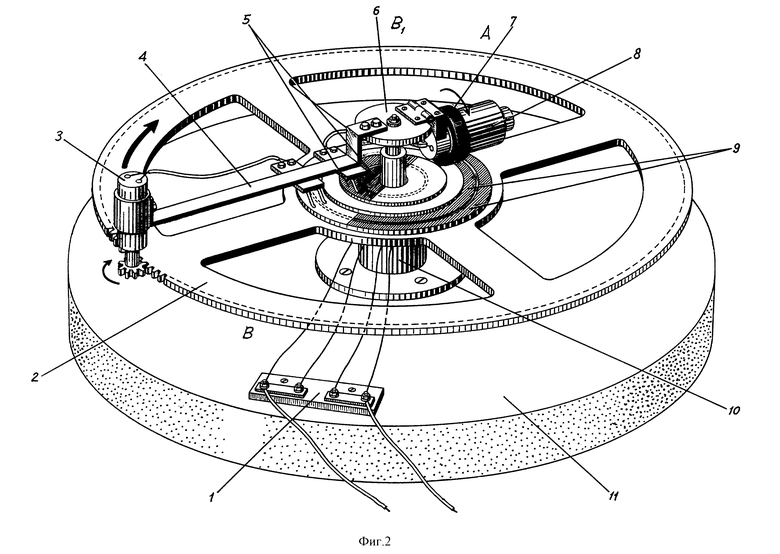
фиг.1 - средство для передвижения в среде "Машина Романова - Механический атом 25";
фиг.2 - средство для передвижения в среде "Машина Романова - Механический атом 26".
"Машина Романова - Механический атом 25"
На фиг. 1 использованы следующие обозначения: 1 - контакты питания, 2 - пластина, 3 - плавучее основание, 4 - малый электродвигатель с роликом, 5 - планка, 6 - контактная система большого электродвигателя, 7 - ось, 8 - шарнирное крепление, 9 - большой электродвигатель, 10 - контактная система малого электродвигателя.
Работа Машины Романова - Механический атом 25 осуществляется следующим образом.
Как видно на фигуре 1, в Машине действуют два электродвигателя. Малый электродвигатель соединен своим роликом с краем пластины (дальней дорожкой). Большой электродвигатель находится у центра и соединен своим роликом с центральной частью пластины (малой дорожкой).
Рассматривая работу электродвигателей нужно обратить внимание на два условия: первое: электродвигатели включаются поочередно и второе: электродвигатели включаются в определенных местах окружности.
Рассмотрим первый цикл - работу малого электродвигателя. В точке А происходит включение электродвигателя. Находясь на планке, электродвигатель перемещается по дальней дорожке пластины по направлению часовой стрелки и толкает в противоположную сторону пластинку и тем самым плавучее основание, опираясь на свою "дорожку".
Это усилие малого электродвигателя и его малой шестерни должно было бы вращать всю систему вместе с плавучим основанием. Но этого не может происходить, так как большой электродвигатель, находясь на противоположной стороне планки у центра, перемещаясь вместе с планкой, давит на пластину роликом усилием всей своей массы и, вращаясь, тянет за собой всю систему элементов, находящихся на плавучем основании.
Однонаправленное действие двух электродвигателей создает поступательное движение всей системы вместе с плавучим основанием на поверхности воды (в условиях невесомости).
Малый электродвигатель, дойдя до точки В, отключается, и сразу же включается большой электродвигатель. Он совершает такую же работу, опираясь на ролик, перемещается по своей малой дорожке. В этом цикле большой электродвигатель должен был бы вращать всю систему вместе с плавучим основанием, но этого также не происходит, так как большой электродвигатель, перемещаясь на своей дорожке, толкает ("тащит") малый электродвигатель вместе с его роликом по дальней дорожке (малый электродвигатель здесь не работает), перемещая всю систему в ту же сторону, в какую ранее перемещал малый электродвигатель.
В точке В1 отключается питание. Происходит замедленное движение вращающихся элементов. Возникает "пауза". В замедленном движении малый электродвигатель входит в точку А, откуда и начинается следующий цикл.
Эффект однонаправленного поступательного движения плавучего основания зависит от подачи соответствующей энергии.
Ускоренное вращение элементов может иметь отрицательный эффект. Появится инерция вращающихся элементов, что может нарушить сам принцип, природу возникновения данного явления.
Предлагаемая Машина отличается от предыдущих механизмов простотой конструкции, где большой электродвигатель выполняет одновременно две функции - противовеса малому электродвигателю и является "рабочей" силой для передвижения системы элементов и плавучего основания.
"Машина Романова - Механический атом 26"
На фиг. 2 использованы следующие обозначения: 1 - контакты питания, 2 - неподвижная большая шестерня, 3 - малый электродвигатель с шестеренкой, 4 - планка, 5 - контактная система большого электродвигателя, 6 - ось вращения, 7 - фрикционный ролик, 8 - большой электродвигатель, 9 - контактная система малого электродвигателя, 10 - стойка, 11 - плот (плавучее основание).
Работа Машины Романова - Механический атом 26 осуществляется следующим образом.
Как видно на фигуре 2, в Машине действуют два электродвигателя. Малый электродвигатель соединен своей шестерней с большой шестерней. Большой электродвигатель находится у центра большой шестерни и соединен с центральной частью большой шестерни. Рассматривая работу электродвигателей, нужно обратить внимание на два условия: первое: электродвигатели включаются поочередно и второе: электродвигатели включаются в определенных местах окружности.
Рассмотрим первый цикл - работу малого электродвигателя. В точке А происходит включение электродвигателя. Находясь на планке, электродвигатель перемещается по большой шестерне по направлению часовой стрелки.
На этом участке полуокружности малый электродвигатель, соединенный своей малой шестерней с большой шестерней, опирается на зубья большой шестерни, тем самым на плавучее основание.
Это усилие малого электродвигателя и его малой шестерни должно было бы вращать всю систему вместе с плавучим основанием. Но этого не может происходить, так как большой электродвигатель, находясь на противоположной стороне планки у центра большой шестерни, перемещаясь вместе с планкой, давит своим роликом на большую шестерню усилием всей своей массы (в это время большой электродвигатель не включен) и, вращаясь, тянет за собой всю систему элементов, находящихся на плавучем основании.
Однонаправленное действие двух электродвигателей создает поступательное движение всей системы вместе с плавучим основанием на поверхности воды (в условиях невесомости).
Малый электродвигатель, дойдя до точки В, отключается, и сразу же включается большой электродвигатель. Он совершает такую же работу, опираясь на ролик, перемещается по своей малой дорожке. В этом цикле большой электродвигатель должен был бы вращать всю систему вместе с плавучим основанием, но этого также не происходит, так как большой электродвигатель, перемещаясь на своей дорожке, толкает ("тащит") малый электродвигатель вместе с его шестерней по дальней дорожке (малый электродвигатель здесь не работает), перемещая всю систему в ту же сторону, в какую ранее перемещал малый электродвигатель.
В точке В1 отключается питание. Происходит замедленное движение вращающихся элементов. Возникает "пауза". В замедленном движении малый электродвигатель входит в точку А, откуда и начинается следующий цикл.
Эффект однонаправленного поступательного движения плавучего основания зависит от подачи соответствующей энергии.
Ускоренное вращение элементов может иметь отрицательный эффект. Появится инерция вращающихся элементов, что может нарушить сам принцип, природу возникновения данного явления.
Предлагаемая машина отличается от предыдущих механизмов простотой конструкции, где большой электродвигатель выполняет одновременно две функции - противовеса малому электродвигателю и в то же время, перемещаясь по своей дорожке и давя на нее всей своей массой, находящейся под влиянием тяготения (гравитации), является "рабочей" силой для передвижения системы элементов и плавучего основания.
Средство для передвижения в среде относится в области игрушек, а именно к плавающим механическим средствам. Содержит плавучее основание, установленные на нем подвижные элементы и механизм их перемещения относительно основания: жестко установленную на основании стойку и установленную на ней с возможностью вращения посредством оси планку, несущую на себе малый электродвигатель. Также средство содержит контактную систему подачи питания электродвигателям, имеющую контакты для каждого электродвигателя, расположенные с обеспечением подачи электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o. По первому варианту выполнения оба электродвигателя имеют фрикционные ролики, входящие в контактирование с пластиной, горизонтально и жестко закрепленной на основании. Стойка закреплена в центре пластины. Большой электродвигатель расположен на планке шарнирно с противоположной малому электродвигателю стороны. Контактирование ролика малого электродвигателя с пластиной осуществляется принудительно. А контактирование ролика большого электродвигателя с пластиной осуществляется от действия веса самого этого электродвигателя. Расстояние от оси до малого электродвигателя большее, чем расстояние от оси до большого электродвигателя. По второму варианту выполнения малый электродвигатель оснащен шестеренкой, входящей в зацепление с большой шестерней, горизонтально и жестко соединенной с плавучим основанием. А большой электродвигатель имеет фрикционный ролик, входящий в контактирование с шестерней. Данное средство дает возможность изучения нетрадиционного движения в условиях плавучести. 2 с.п.ф-лы, 2 ил.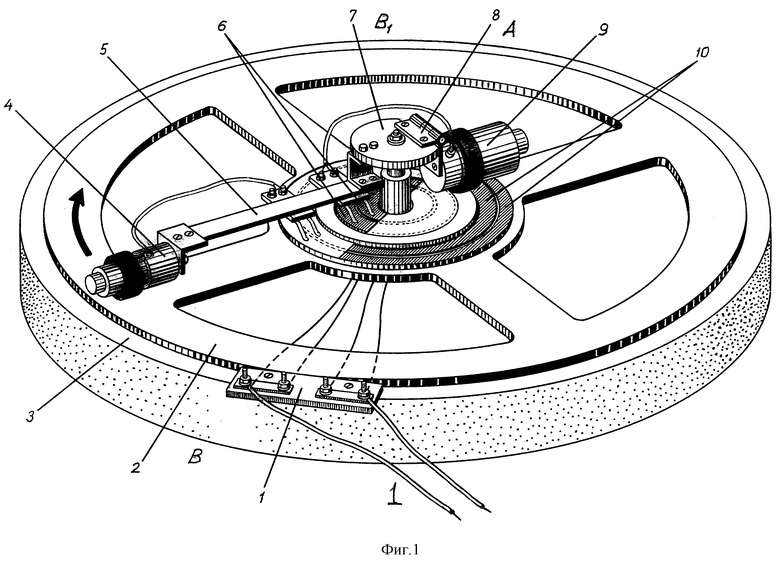
| ДЕМОНСТРАЦИОННАЯ МОДЕЛЬ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЖИДКОЙ ПОВЕРХНОСТИ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ" | 1990 |
|
RU2031685C1 |
| МАШИНА РОМАНОВА - МЕХАНИЧЕСКИЙ АТОМ 10 | 1998 |
|
RU2137523C1 |
| МАШИНА МЕХАНИЧЕСКИЙ АТОМ 14 | 1999 |
|
RU2150983C1 |
| US 4394804 A, 26.07.1983 | |||
| US 4249334 A, 10.02.1981. | |||

