Изобретение относится к бортовым системам автоматического управления существенно нестационарными беспилотными летательными аппаратами.
Известна система автоматического управления летательным аппаратом (Л.А.), в которой содержится блок задающего воздействия, блок сравнения, суммирующий усилитель, датчики состояния и исполнительное устройство [1].
Недостатком известной системы управления является ограниченность функциональных возможностей в условиях нестационарности параметров летательного аппарата, вызванных изменениями скорости и высоты полета летательного аппарата.
Наиболее близким к предлагаемому изобретению является система управления летательным аппаратом, содержащая датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные сумматор и исполнительное устройство [2].
Недостатком этой системы являются ограниченные функциональные возможности по устойчивости и точности, обусловленные отсутствием средств инвариантности для решения проблемы нестационарности летательного аппарата в условиях существенного изменения условий полета по скорости и высоте.
Решаемой в предложенной системе управления технической задачей является обеспечение инвариантности показателей качества процессов стабилизации и повышение точностных характеристик управления. Предложенным построением системы управления обеспечивается адаптация параметров регулирующей части системы угловой стабилизации, повышение устойчивости и качества в условиях широкого диапазона параметров летательного аппарата.
Указанный технический результат достигается тем, что в известную систему стабилизации углового движения летательного аппарата, содержащую датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные сумматор и исполнительное устройство, дополнительно введены задатчик опорного сигнала, последовательно соединенные датчик скоростного напора и блок деления, второй вход которого подключен к выходу задатчика опорного сигнала, первый блок умножения, первый вход которого соединен с выходом блока сравнения, второй - с выходом блока деления, а выход - с первым входом сумматора, и последовательно соединенные блок масштабирования, вход которого соединен с выходом блока деления, и второй блок умножения, второй вход которого соединен с выходом датчика угловой скорости, а выход - со вторым входом сумматора.
Действительно, при этом обеспечивается отработка сигналов управления с максимальным качеством в широком диапазоне изменения высоты, скорости полета посредством введения средств адаптации.
Построение системы управления осуществляется следующим образом.
Уравнения углового движения летательного аппарата, например, по [3] описываются в виде
где а, в - динамические коэффициенты летательного аппарата по демпфированию и эффективности соответственно;
ϕ - угловое положение летательного аппарата;
ωϕ - угловая скорость;
δ - угол отклонения рулевых поверхностей исполнительным устройством.
Закон управления, формирующий сигнал управления для исполнительного устройства, формируется в виде

где Δϕ - сигнал рассогласования:

здесь ϕзад - сигнал задающего воздействия;
К1, К2 - передаточные числа.
Приняв безынерционную отработку исполнительным устройством сигнала управления, т.е. положив δ≡σ, из уравнений (1)÷(3) получаем описание процессов регулирования в замкнутом контуре (закон управления - летательный аппарат) в виде

или

Рассмотрим характеристическое уравнение замкнутой системы управления по системе уравнений (5):


Уравнение (6) позволяет оценить параметры закона управления (2) с динамическими коэффициентами летательного аппарата а и в.
Для обеспечения требуемых характеристик устойчивости и качества необходимо обеспечить в процессе полета выполнение условий постоянства (инвариантности) коэффициентов характеристического уравнения, т.е.
В (7) коэффициент а, характеризующий собственное демпфирование летательного аппарата, достаточно мал, слабо изменяется и не является характерным, доминирующим в сравнении с параметром в К2, определяющим демпфирование замкнутой системы управления в целом. Поэтому условия сохранения требуемых показателей устойчивости и качества, исходя из (7), могут быть определены как

где в - коэффициент эффективности органов управления, равный, например, по [3]:
где mδ - производная коэффициента эффективности рулей ЛА;
s, l - характерные геометрические параметры ЛА;
J - момент инерции ЛА;
q - скоростной напор:
здесь ρ - плотность воздуха на текущей высоте полета, ρ=ρ (Н);
V - скорость полета.
Параметр mδ по текущему состоянию является в основном функцией числа Маха:

где а - скорость звука на текущей высоте полета, для аэродинамического летательного аппарата меняется в небольших пределах и может быть принята постоянной - осредняемой или максимальной для данной области высот. Этот коэффициент можно считать стабильным в окрестности балансировочных значений текущих углов ЛА.
Момент инерции J для беспилотных летательных аппаратов также меняется незначительно. Это обстоятельство тем более корректно, что конструктивно изменение массы летательного аппарата за счет выгорания топлива изменяет и центровочные характеристики, обусловливая максимальное сохранение стабильности моментов инерции J≈const.
Таким образом, исходя из уравнений (8) и на основе уравнений (9)÷(11) с учетом изложенного, для обеспечения процессов адаптации необходимо идентифицировать параметр в и по нему сформировать функцию адаптации - обозначим ее как λ, т.е. пусть λ=в.
Тогда из уравнений (8) получаем алгоритмы адаптации:
Определяем в качестве Х скоростной напор q, т.е.

На основе изложенного рассматривается предлагаемая система стабилизации.
На чертеже представлена блок-схема системы угловой стабилизации для управления нестационарным летательным аппаратом.
Система управления содержит датчик угла 1 (ДУ), датчик угловой скорости 2 (ДУС), последовательно соединенные задатчик угла 3 (ЗУ) и блок сравнения 4 (БС), второй вход которого соединен с выходом датчика угла 1, последовательно соединенные сумматор 5 (С) и исполнительное устройство 6 (ИУ), задатчик опорного сигнала 7 (ЗОС), последовательно соединенные датчик скоростного напора 8 (ДСН) и блок деления 9 (БД), второй вход которого подключен к выходу задатчика опорного сигнала 7, первый блок умножения 10 (1БУ), первый вход которого соединен с выходом блока сравнения 4, второй - с выходом блока деления 9, а выход - с первым входом сумматора 5, и последовательно соединенные блок масштабирования 11 (БМ), вход которого соединен с выходом блока деления 9, и второй блок умножения 12 (2БУ), второй вход которого соединен с выходом датчика угловой скорости 2, а выход - со вторым входом сумматора 5.
Летательный аппарат условно показан на чертеже пунктирной линией.
Система управления работает следующим образом.
Сигнал управления σ для подачи на исполнительное устройство 6 формируется датчиками и блоками 1, 2, 3, 4, 5, 10, 11, 12 по уравнениям (2) и (3), при этом сигнал угла ϕ снимается с датчика 1, сигнал угловой скорости ωϕ снимается с датчика угловой скорости 2, сигнал задающего воздействия по крену ϕзад формируется задатчиком угла 3, а сигнал рассогласования Δϕ(Δϕ=ϕ-ϕзад) формируется блоком сравнения 4. Адаптивные коэффициенты К1 и К2 формируются на выходе блоков 9 и 11 соответственно по сигналу λ=q в соответствии с уравнением (12). Сигнал λ=q является сигналом идентификации, формируется датчиком скоростного напора 8. В первом блоке умножения 10 и во втором блоке умножения 12 формируются компоненты сигнала управления К1Δϕ и К2ωϕ в соответствии с уравнением (2).
Исполнительное устройство 6 отрабатывает суммарный управляющий сигнал σ, отклоняя рули на величину δ.
Сигналы функций идентификации и адаптации несложно реализуются на элементах автоматики и вычислительной техники, например, по [4, 5].
Предложенная система угловой стабилизации для управления нестационарным летательным аппаратом позволяет обеспечить инвариантность показателей качества и повысить точность управления в условиях широкого диапазона условий полета.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов./ Под ред. Г.С.Бюшгенса. М.: Наука. Физматлит, 1998, с.443.
2. Патент РФ №2251136, 24.12.02 г., кл. G05D 1/08.
3. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов, М.: Машиностроение, 1973, с.486.
4. В.Б.Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.22, 41.
5. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М., Машиностроение, 1981, с.107, 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КРЕНУ | 2005 |
|
RU2305308C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ПЕРЕМЕННОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491601C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338235C1 |
| СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2413274C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2469373C1 |
Изобретение относится к области приборостроения и может быть использовано для управления существенно нестационарными беспилотными летательными аппаратами. Технической результат - обеспечение инвариантности показателей качества процессов стабилизации и повышение точности управления. Для достижения данного результата система управления содержит датчики угла, угловой скорости и скоростного напора, задатчики угла и опорного сигнала, блок сравнения, исполнительное устройство, сумматор, блок деления и два блока умножения. 1 ил.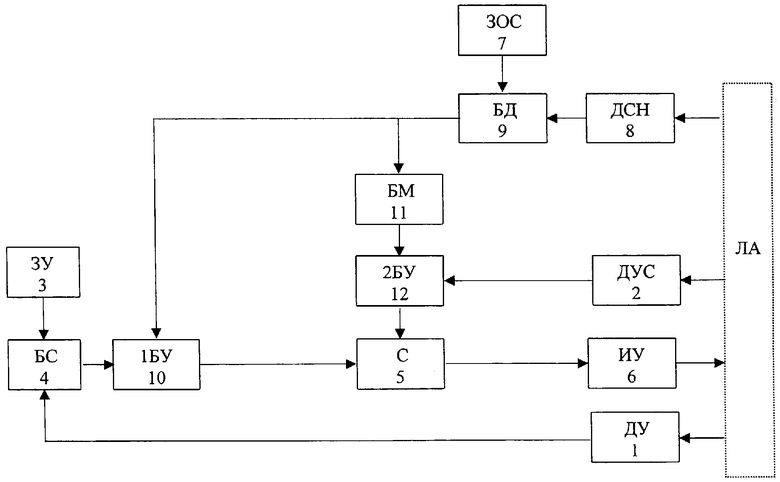
Бортовая система угловой стабилизации для управления нестационарным летательным аппаратом, содержащая датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные сумматор и исполнительное устройство, отличающаяся тем, что она содержит задатчик опорного сигнала, последовательно соединенные датчик скоростного напора и блок деления, второй вход которого подключен к выходу задатчика опорного сигнала, первый блок умножения, первый вход которого соединен с выходом блока сравнения, второй - с выходом блока деления, а выход - с первым входом сумматора, и последовательно соединенные блок масштабирования, вход которого соединен с выходом блока деления, и второй блок умножения, второй вход которого соединен с выходом датчика угловой скорости, а выход - со вторым входом сумматора.
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов | |||
| Под ред | |||
| Бюшгенса Г.С | |||
| М.: Наука | |||
| Физматлит, 1998, с.443 | |||
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| Лебедев А.А., Чернобровкин Л.С | |||
| Динамика полета беспилотных летательных аппаратов, М.: Машиностроение, 1973, с.486 | |||
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления | |||

