Область техники, к которой относится изобретение
Настоящее изобретение относится к области детекторов, предназначенных для обнаружения недозволенных объектов или веществ в зоне охраняемого доступа.
В частности, настоящее изобретение относится к области металлодетекторов индукционного типа.
Настоящее изобретение относится, в частности, но не исключительно, к встраиванию металлодетектора в сканер тела, предназначенный для досмотра людей, например, пассажиров перед посадкой на борт в аэропортах или людей на входе в общественную зону, например, место проведения спортивных мероприятий, такое, как стадион или зрительный зал, для обнаружения запрещенных объектов, спрятанных под одеждой. Такие устройства, в частности, устраняют необходимость систематического прощупывания.
Уровень техники
В настоящее время очевидна потребность в обеспечении надежного отслеживания попыток проноса запрещенных изделий, в частности - оружия, в зону ограниченного доступа или выноса их из нее.
Поставленная задача включает в себя множество самых разных ситуаций, в частности, помимо прочего: попытку проноса запрещенных изделий в охраняемую зону, например, в аэропорт, магазин, школу, на железнодорожную станцию, в государственную или частную организацию, или попытку выноса изделий за установленный периметр, например, в случае хищения из хозяйственного общества или сохраняемого объекта.
Известны различные типы детекторов металлических объектов. Обычно металлодетекторы представляют собой детекторы индукционного типа. Они содержат по меньшей мере одну передающую катушку и по меньшей мере одну приемную катушку. Передающая катушка работает на переменном электрическом токе. Приемная катушка выполнена с возможностью обнаружения возмущений магнитного поля из-за присутствия металлического объекта, например, уменьшения амплитуды магнитного поля или изменения фазы сигнала, например, из-за вихревых токов, возникающих на металлическом объекте.
Также известны различные типы сканеров тела. Наиболее давно известными сканерами тела являются рентгеновские сканеры тела. В основе более современных сканеров тела лежит технология под названием «технология миллиметровых волн».
Пример сканера тела раскрыт в документе ЕР 2202700. В данном документе, в частности, предложено ввести дополнительный металлодетектор у входа сканера тела.
В течение ряда лет разрабатывались сканеры тела, предназначенные для обнаружения оружия, взрывчатых веществ и т.п., спрятанных под одеждой людей, входящих в охраняемую зону. Во всех этих системах применены технологии, в основе которых лежит обнаружение лучистых энергий, модулируемых, отражаемых или испускаемых телом досматриваемого человека. В число применяемых таким образом лучистых энергий входят рентгеновские лучи, микроволны, миллиметровые волны, инфракрасное излучение, терагерцовые волны и ультразвук.
Несмотря на применение различных типов лучистых энергий и геометрических параметров визуализации, результатом работы всех указанных сканеров тела является электронное изображение человека, на котором его одежда является прозрачной. Далее данное изображение отображается на экране и просматривается оператором, который таким образом может определить, несет ли данный человек на себе искомый объект. Для этого оператор, обученный обнаруживать искомые объекты, должен быть способен определить, соответствуют ли выявленные сканером тела объекты анатомии человека или представляют ли они собой разрешенный объект, например, зажигалку, новой платок или детали, или искомый объект, например, оружие или взрывчатое вещество.
В настоящее время становится ясно, что люди, пытающиеся обманным путем пронести запрещенный объект, в частности - оружие, в охраняемую зону, проявляют немалую находчивость при сокрытии этих объектов, например, разбирают объект на несколько частей и рассредоточивают их по телу.
Это ведет к усложнению и увеличению продолжительности досмотра с помощью сканеров тела.
Кроме того, несмотря на в целом удовлетворительные показатели известных металлодетекторов в части обнаружения наличия или отсутствия металлического объекта, они зачастую неэффективны в части определения местоположения металлического объекта на теле человека.
В документе ЕР 1750148 раскрыт металлодетектор, содержащий три или четыре катушки, расположенные по обе стороны прохода для определения положения искомого объекта, который человек несет на боку и/или в центральной части тела.
В документе US 4012690 раскрыта система обнаружения, содержащая индукционные петли, параллельные друг другу и опоясывающие дверь.
В документе ЕР 2202700 раскрыта система обнаружения, в которой скомбинированы две технологии обнаружения.
В документе WO 2018/225028 раскрыта система, содержащая сканер тела и детектор для проверки обуви.
Сущность изобретения
Одна из целей изобретения состоит в том, чтобы предложить новые средства обнаружения для улучшения обнаружения искомых объектов, которые могут быть замаскированы на теле человека.
Другая цель изобретения состоит в обеспечении возможности определения места расположения металлического объекта, обнаруженного на теле человека.
В частности, одна из целей изобретения состоит в том, чтобы предложить средства обнаружения, эффективные независимо от места прикрепления несанкционированного объекта на теле человека.
Дополнительная цель изобретения состоит в том, чтобы предложить средства, позволяющие повысить точность и скорость досмотра сканерами тела по сравнению с известными из уровня техники сканерами тела.
Указанные цели изобретения достигаются за счет применения системы обнаружения несомых людьми запрещенных объектов и способ обнаружения соответствующих запрещенных объектов по независимым пунктам прилагаемой формулы изобретения. Варианты осуществления являются предметом зависимых пунктов формулы.
В частности, следует отметить, что, в отличие от документа ЕР 1750148 на имя Заявителя, предлагаемая система позволяет дополнительно улучшить определение положения металлического объекта, выявленного по меньшей мере тремя преобразователями. Разумеется, в отсутствии барьеров обнаружения прохождения и только по сигналам, поступающим от по меньшей мере трех преобразователей, невозможно распознать положение металлического объекта в направлении в глубину (на передней / задней стороне тела).
В частности, система обнаружения содержит металлодетектор, содержащий по меньшей мере три индукционных преобразователя, расположенных по обе стороны прохода, при этом два из указанных преобразователей размещены на одной и той же стороне прохода и продольно разнесены вдоль направления движения в проходе, а третий преобразователь расположен на противоположной стороне прохода, за счет чего указанные три преобразователя в комбинации обеспечивают возможность распознания в пространстве местоположения обнаруженных металлических объектов.
Другим предпочтительным признаком изобретения является то, что система содержит в комбинации сканер тела и указанный металлодетектор, встроенный в сканер тела, причем металлодетектор выполнен с возможностью управления сканером тела путем регулирования чувствительности сканера тела, в по меньшей мере одной исследуемой зоне, в зависимости от того, обнаружены ли или нет металлические объекты указанным металлодетектором.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит три индукционных преобразователя, образующих передатчик и два приемника, например, размещенных по схеме, при которой передатчик расположен на первой стороне прохода, а два соответствующих приемника размещены на противоположной стороне прохода.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит три индукционных преобразователя, образующих два передатчика и приемник, например, размещенных по схеме, при которой два передатчика расположены на первой стороне прохода, а соответствующий приемник размещен на противоположной стороне прохода.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит четыре индукционных преобразователя, образующих два передатчика и два приемника, например, размещенных по схеме, при которой два преобразователя расположены на первой стороне прохода и два преобразователя размещены на противоположной стороне прохода.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит по меньшей мере три индукционных преобразователя, выполненных с возможностью распознания положения обнаруженного металлического объекта, как в направлении по ширине прохода, поперечном направлению движения, обычно на левой или на правой стороне тела человека, так и в направлении в глубину, продольном и параллельном направлению движения, обычно на передней или на задней стороне тела человека.
Другим предпочтительным признаком изобретения является то, что каждый из индукционных преобразователей выполнен с возможностью работы попеременно в качестве передатчика и/или приемника.
Другим предпочтительным признаком изобретения является то, что каждый преобразователь сформирован из по меньшей мере одной катушки.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит по меньшей мере один барьер обнаружения прохождения, например, оптический барьер, связанный с преобразователями с возможностью обнаружения положения человека в проходе относительно преобразователей.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит три барьера обнаружения прохождения, например, три оптических барьера, рассредоточенных продольно вдоль прохода в металлодетекторе и связанных с преобразователями с возможностью обнаружения положения человека в проходе относительно преобразователей.
Другим предпочтительным признаком изобретения является то, что металлодетектор содержит индукционные преобразователи, генерирующие основные линии обнаружения между двумя преобразователями, соответственно - передающим и приемным преобразователями, некоторые из которых поперечны направлению движения в металлодетекторе, а другие проходят по косой или по диагонали относительно данного направления движения в металлодетекторе, при этом поперечные линии обнаружения служат, главным образом, для обнаружения металлических объектов, несомых человеком на передней и на задней стороне его тела, если передняя сторона первой достигает указанных линий, а задняя сторона тела человека соответственно последней покидает их, а косые линии обнаружения служат, главным образом, для обнаружения металлических объектов, несомых человеком на левой стороне или на правой стороне его тела, если указанные стороны тела человека последовательно пересекают эти линии.
Изобретение также относится к способу обнаружения запрещенных объектов, несомых человеком, посредством металлодетектора, содержащего по меньшей мере три индукционных преобразователя, расположенных по обе стороны прохода, при этом два из указанных преобразователей размещены на одной и той же стороне прохода и продольно разнесены вдоль направления движения в проходе, а третий преобразователь расположен на противоположной стороне прохода, отличающийся тем, что он включает в себя этапы, на которых: осуществляют обнаружение металлических объектов, несомых человеком, с определением местоположения в трехмерном пространстве на теле человека обнаруженных металлических объектов, посредством металлодетектора.
Другим предпочтительным признаком является то, что предлагаемый способ включает в себя этап, на котором управляют сканером тела путем регулирования его чувствительности, в зависимости от того, обнаружены ли или нет металлические объекты соответствующим металлодетектором, в по меньшей мере одной исследуемой зоне, соответствующей местоположению металлического объекта, посредством металлодетектора.
Краткое описание чертежей
Прочие признаки, цели и преимущества настоящего изобретения станут понятны из нижеследующего раздела «Осуществление изобретения» и прилагаемых чертежей, приведенных в качестве неограничивающих примеров, где:
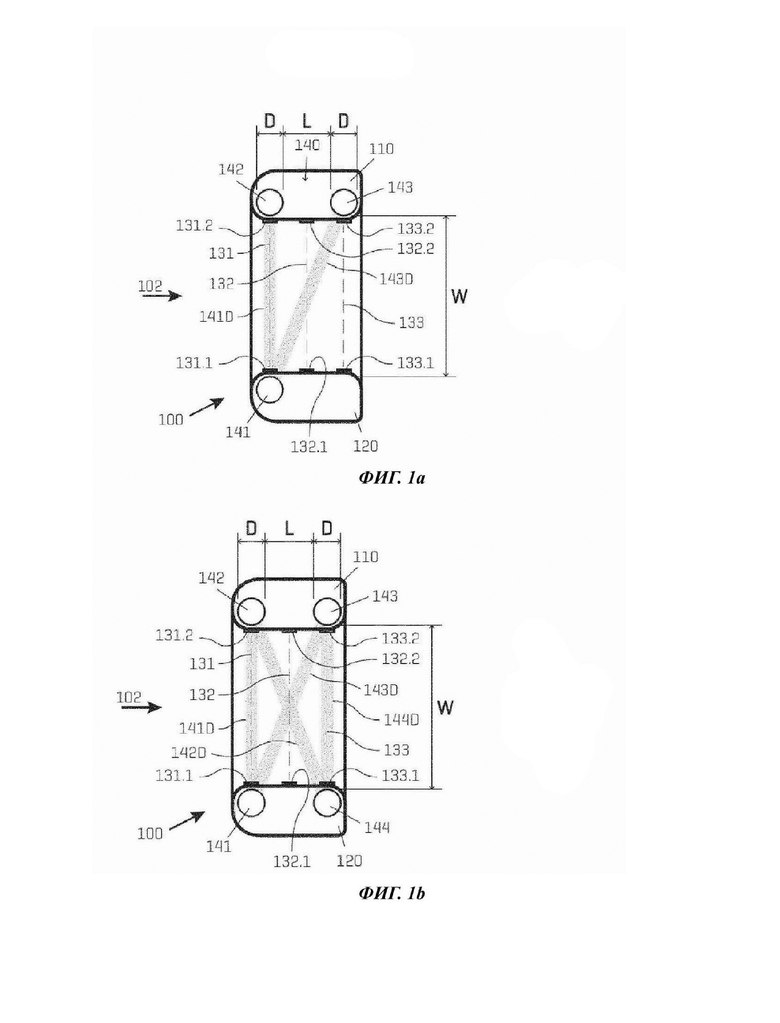
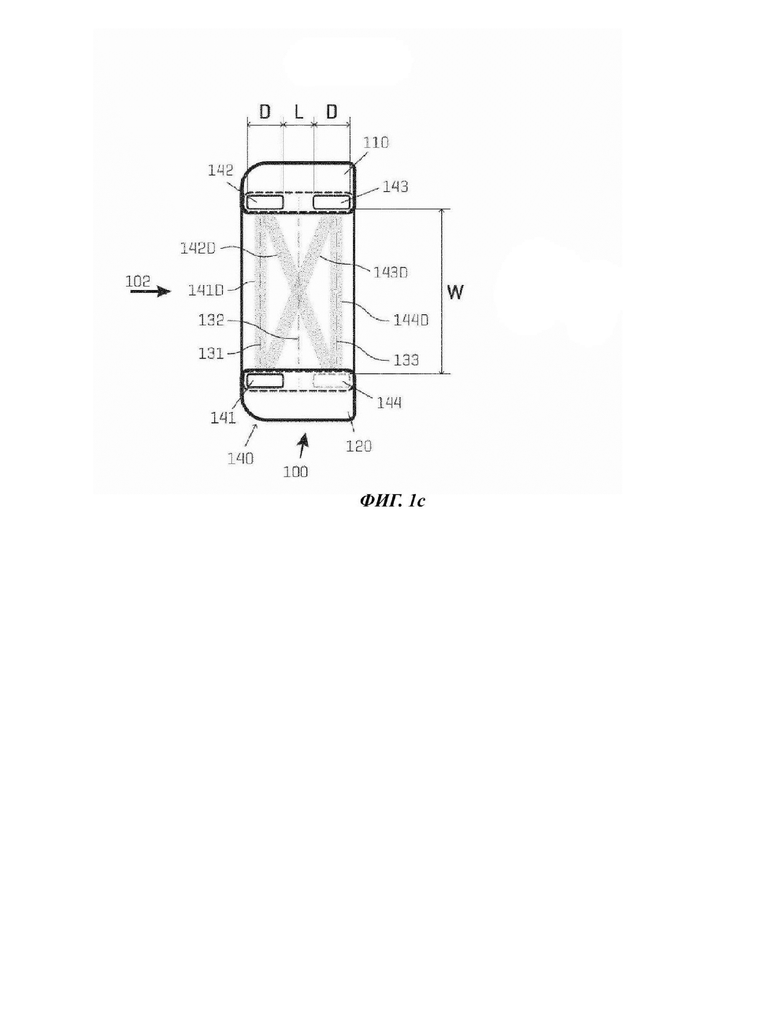
Фиг. 1а, 1b и 1с схематически изображают виды в горизонтальном разрезе металлодетектора по трем альтернативным вариантам осуществления изобретения соответственно;
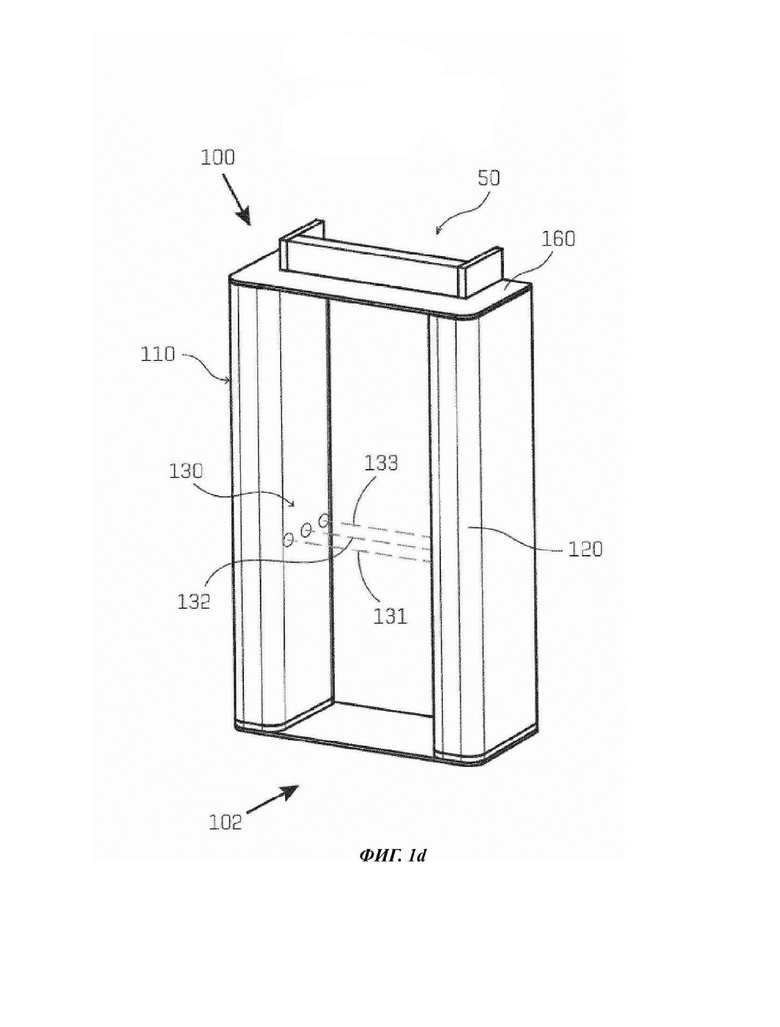
Фиг. 1d схематически изображает вид в аксонометрии металлодетектора по предпочтительному варианту осуществления изобретения;
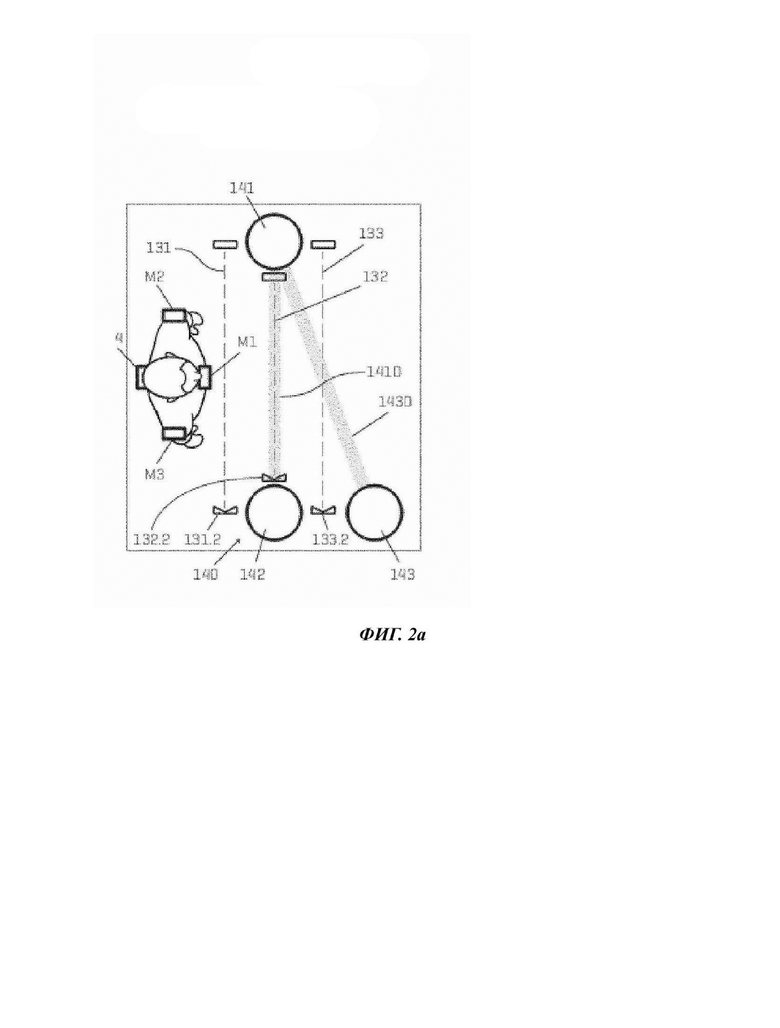
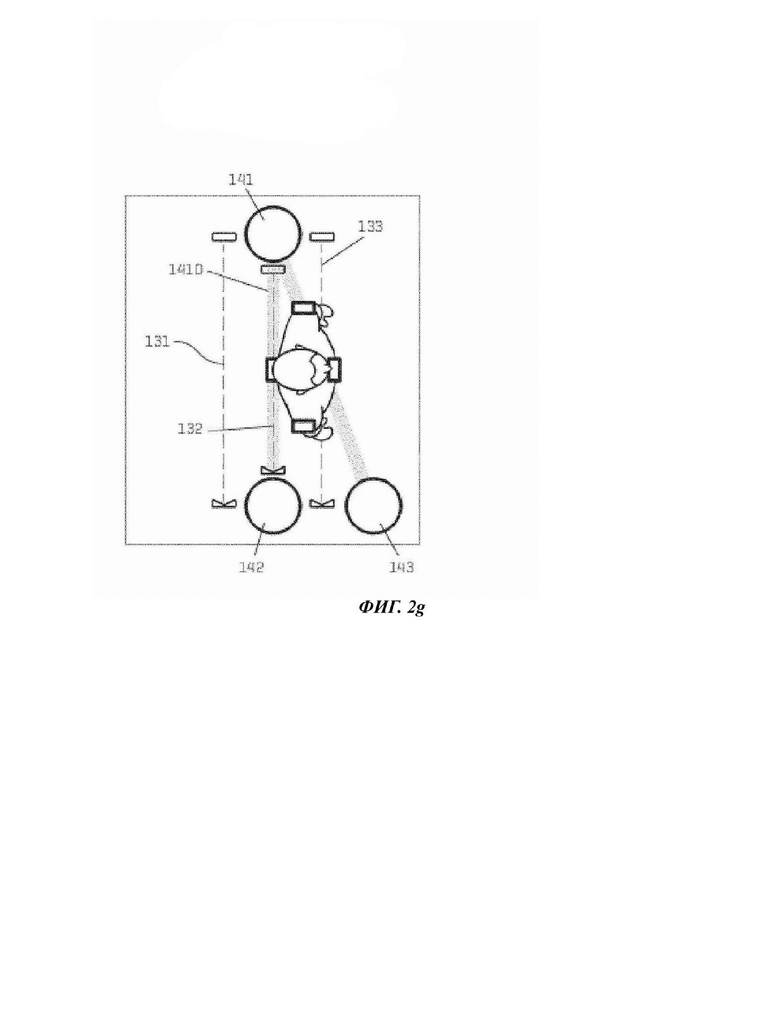
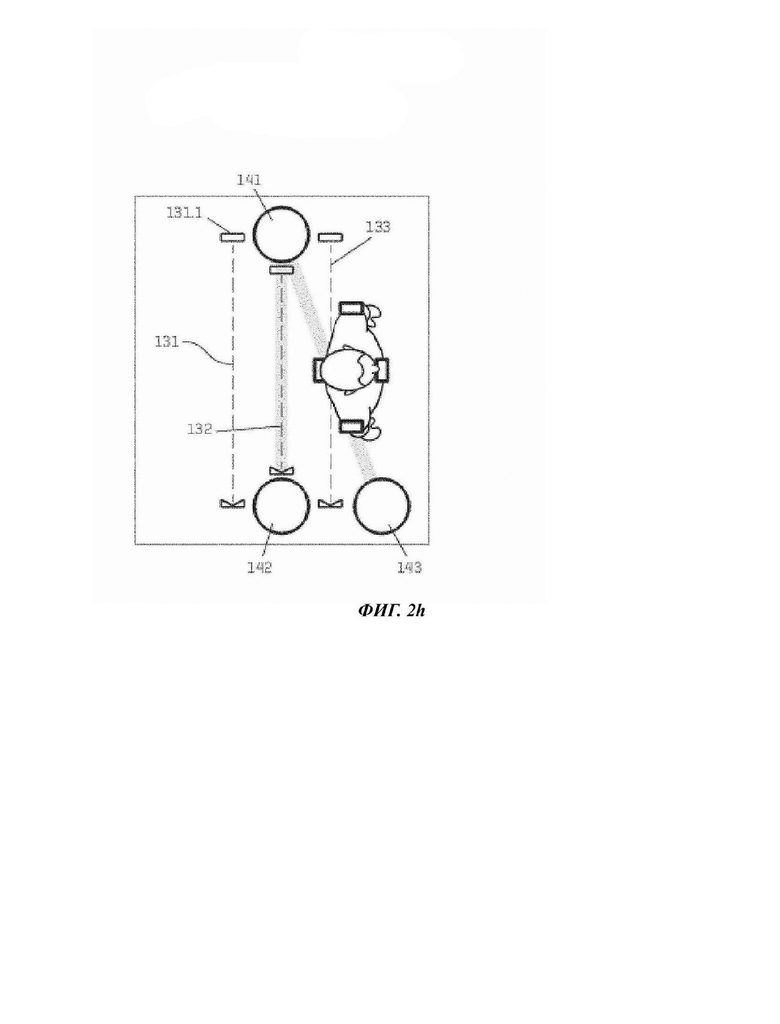
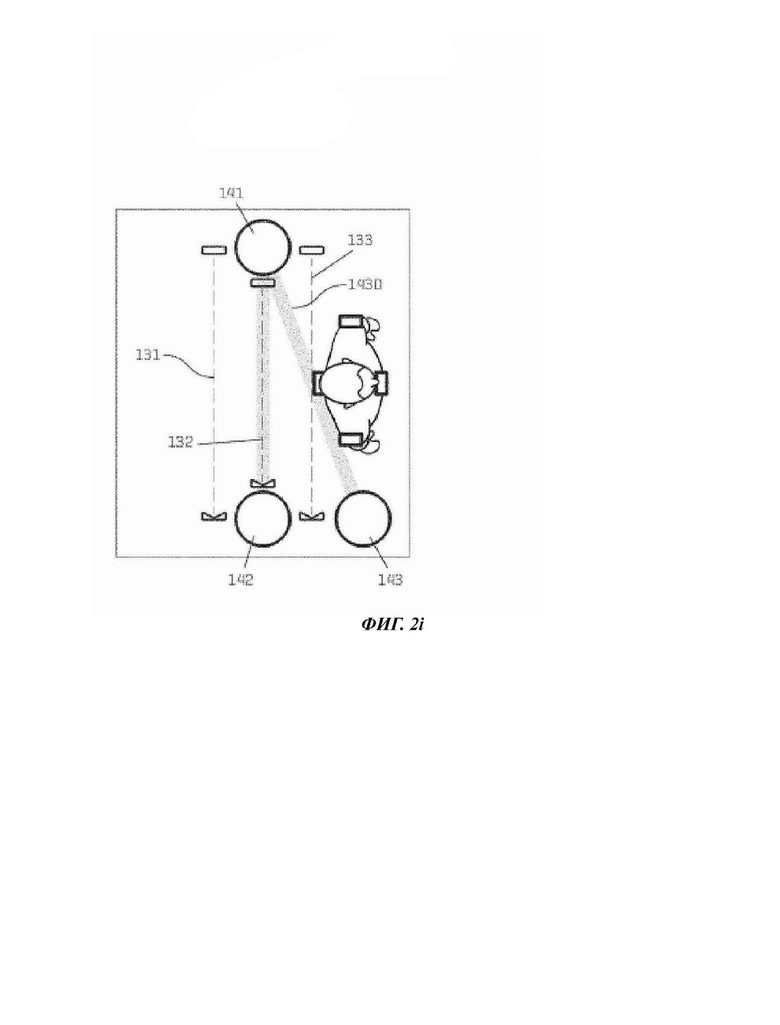
Фиг. 2а - 2i изображают серию последовательностей обнаружения посредством предлагаемого металлодетектора, содержащего три преобразователя, в ходе продвижения человека в проходе металлодетектора, а именно - девять последовательных этапов данного процесса обнаружения,
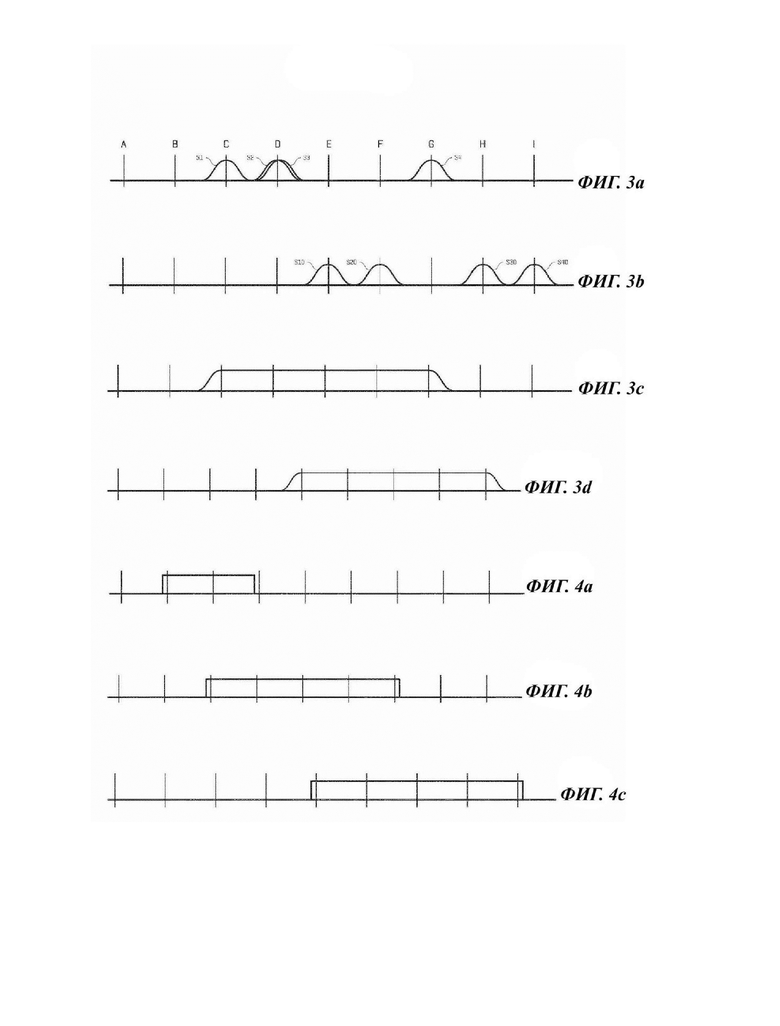
Фиг. 3а и 3b представляют сигналы, полученные на приемных преобразователях, проиллюстрированных на Фиг. 2, в ходе продвижения человека, несущего металлические объекты на передней стороне, задней стороне, на левой и правой сторонах тела, в проходе металлодетектора.
Фиг. 3с и 3d схематически изображают сигналы, полученные на приемных преобразователях, проиллюстрированных на Фиг. 2, в ходе продвижения человека в проходе металлодетектора в теоретически возможном гипотетическом случае, когда металлический объект целиком опоясывает досматриваемого человека.
Фиг. 4а, 4b и 4с представляют сигналы, полученные на выходах из барьеров обнаружения прохождения, проиллюстрированных на Фиг. 2, в ходе продвижения человека в проходе металлодетектора,
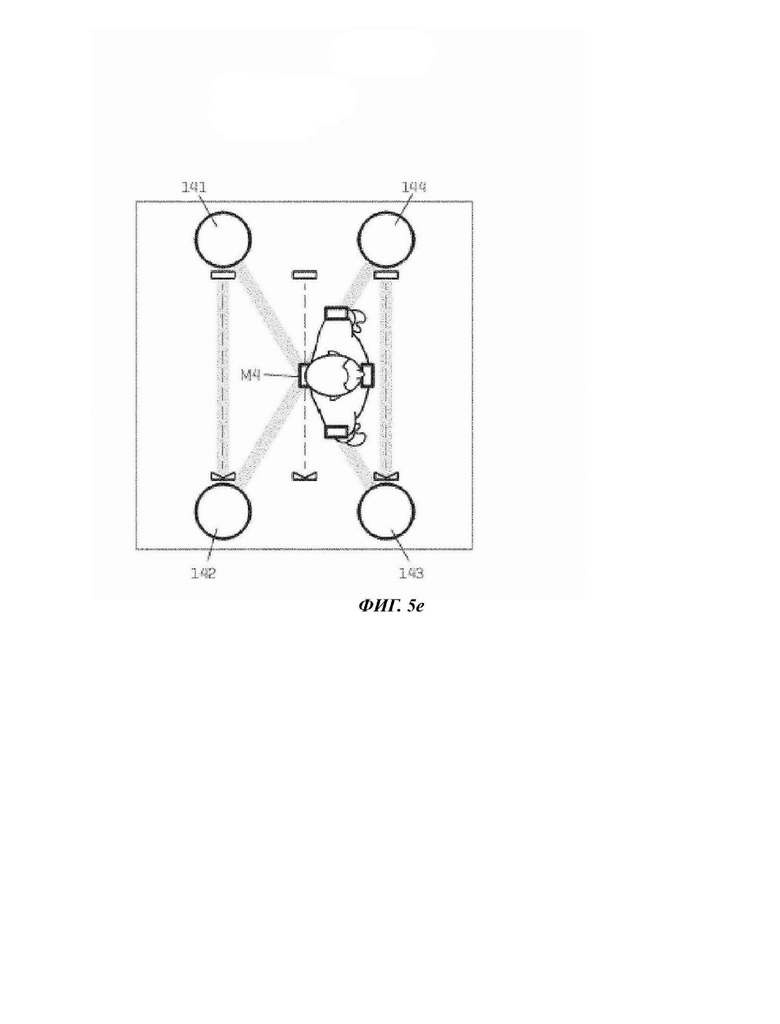
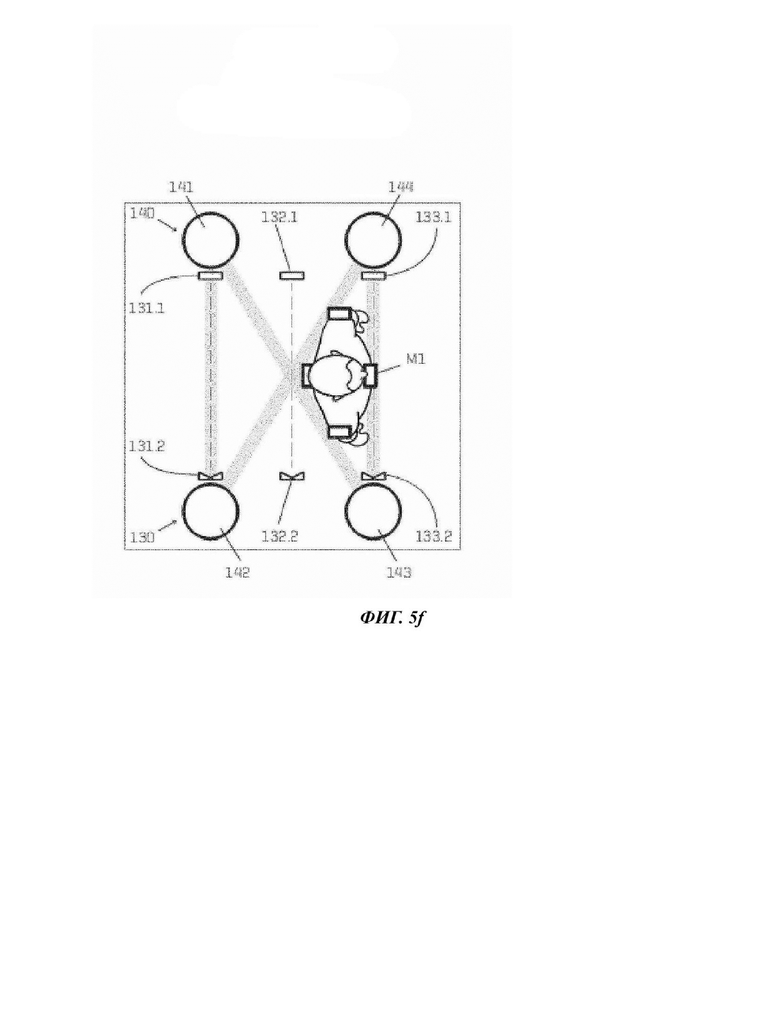
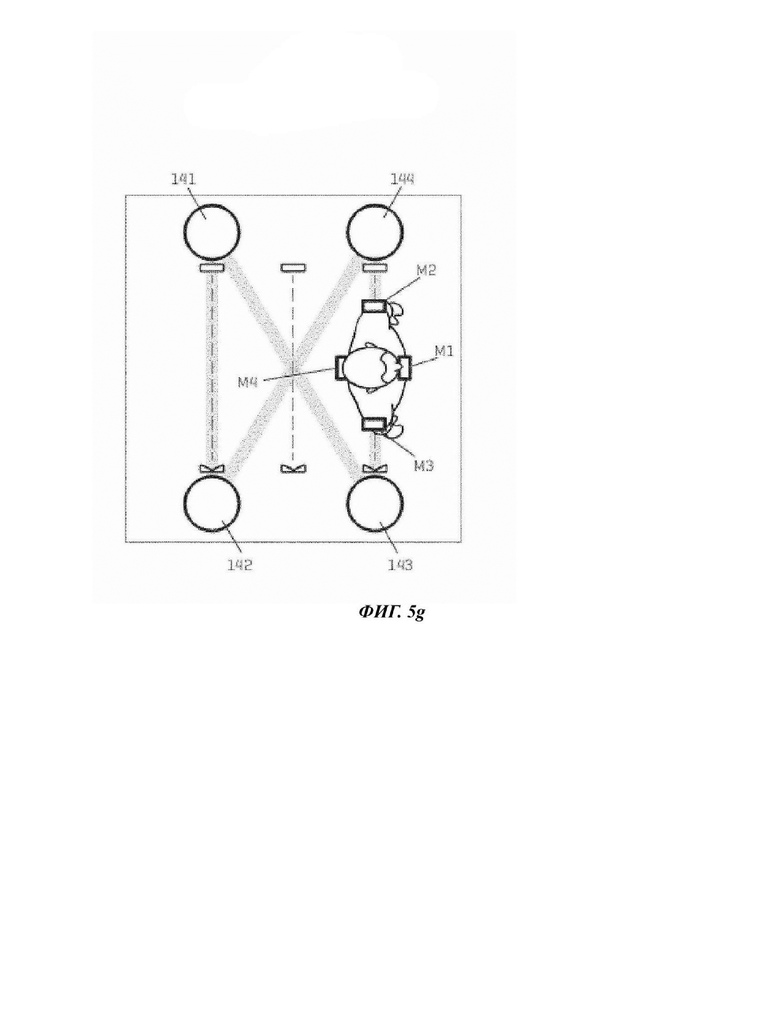
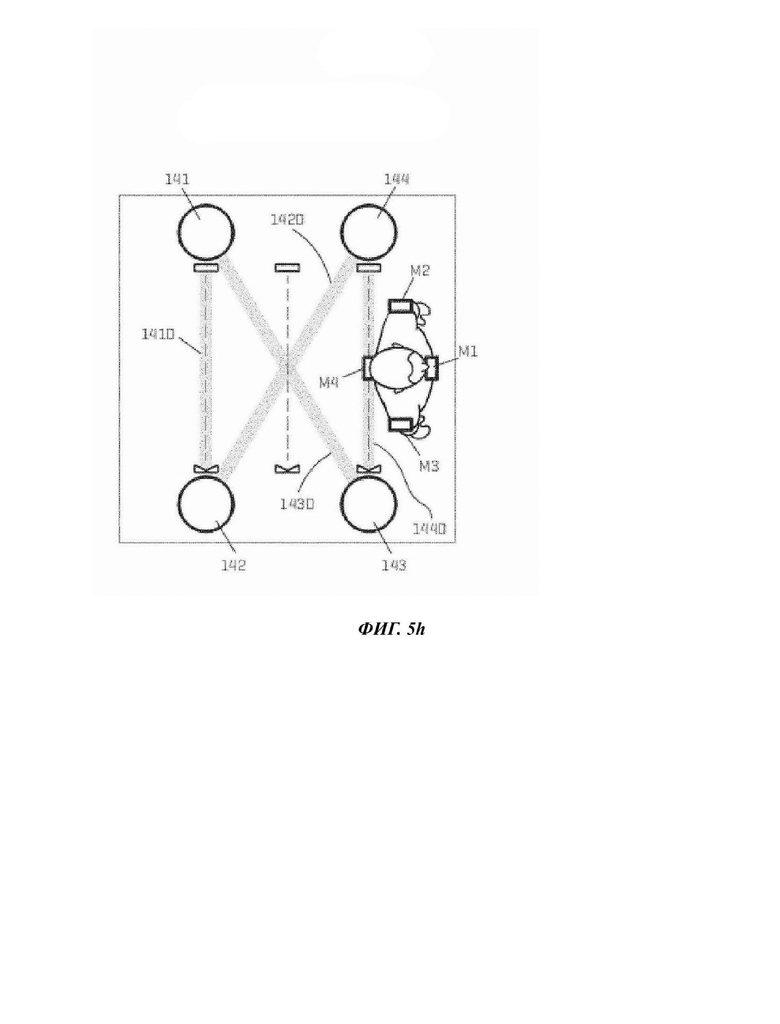
Фиг. 5 представляет серию последовательностей обнаружения посредством разновидности предлагаемого металлодетектора, содержащего четыре преобразователя - два передающих преобразователя и два приемных преобразователя, в ходе продвижения человека, несущего металлические объекты на передней стороне, задней стороне, на левой и правой сторонах тела, в проходе металлодетектора, а именно - Фиг. 5а - 5h представляют восемь последовательных этапов данного процесса обнаружения;
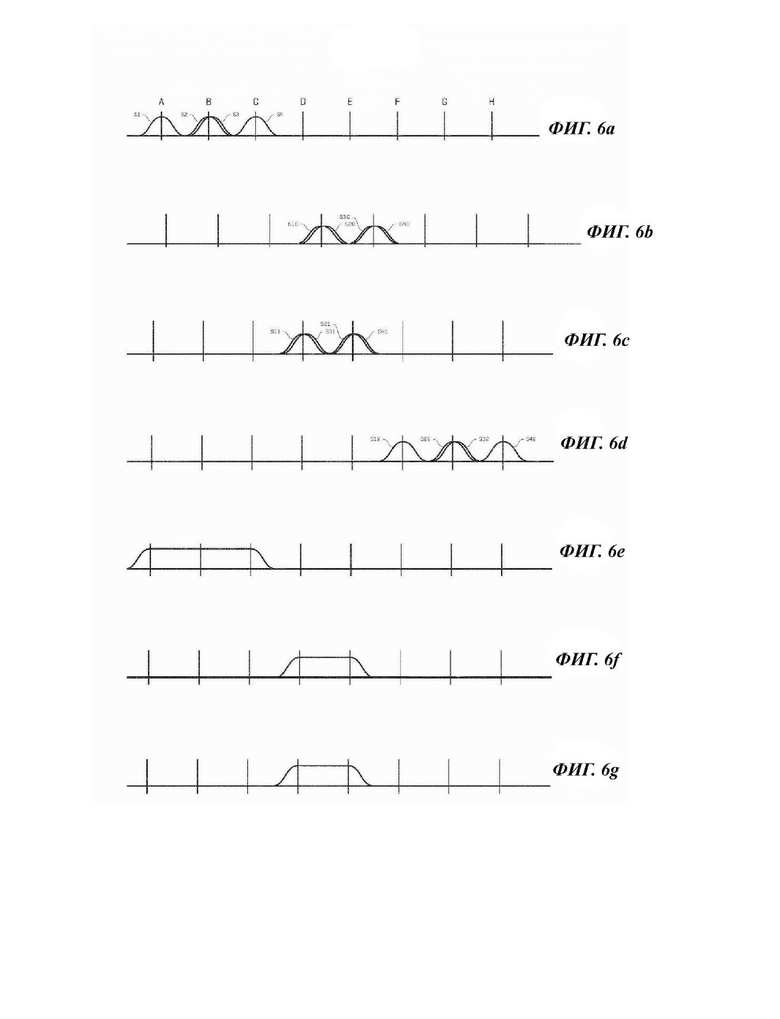
Фиг. 6а, 6b, 6с и 6d представляют сигналы, полученные на приемных преобразователях, проиллюстрированных на Фиг. 5, в ходе продвижения человека в проходе металлодетектора после последовательного срабатывания передающих преобразователей;
Фиг. 6е, 6f, 6g и 6h схематически изображают сигналы, полученные на приемных преобразователях, проиллюстрированных на Фиг. 5, в ходе продвижения человека в проходе металлодетектора в теоретически возможном гипотетическом случае, когда металлический объект целиком опоясывает досматриваемого человека;
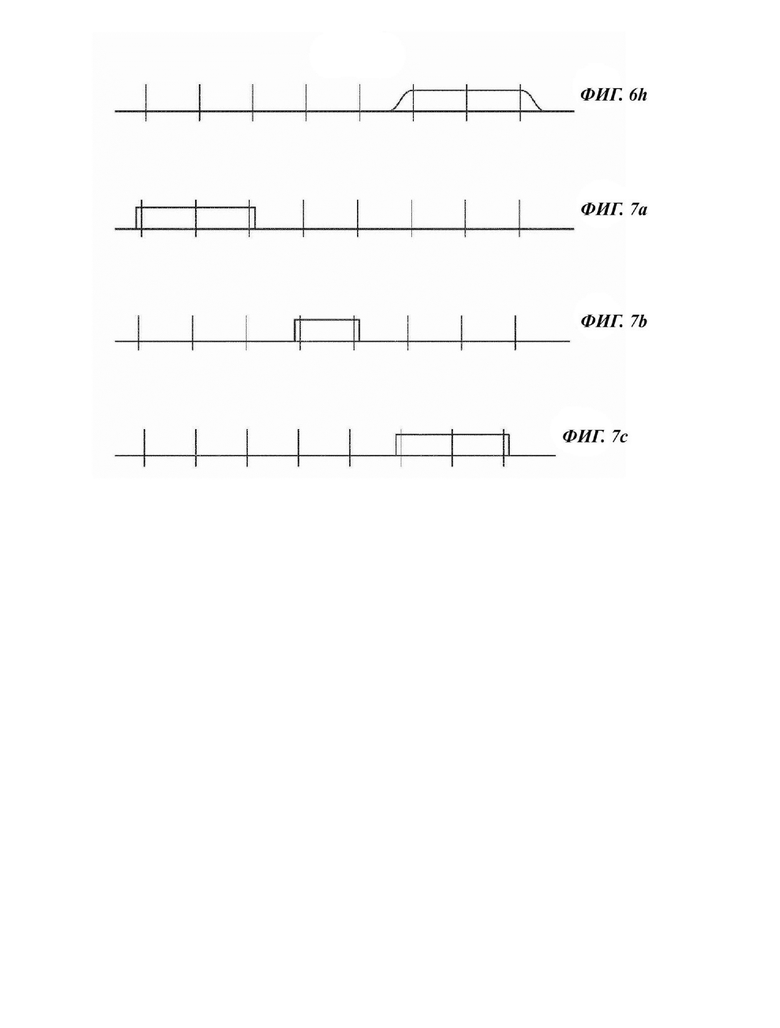
Фиг. 7а, 7b и 7с представляют сигналы, полученные на выходах из барьеров обнаружения прохождения, проиллюстрированных на Фиг. 5, в ходе продвижения человека в проходе металлодетектора,
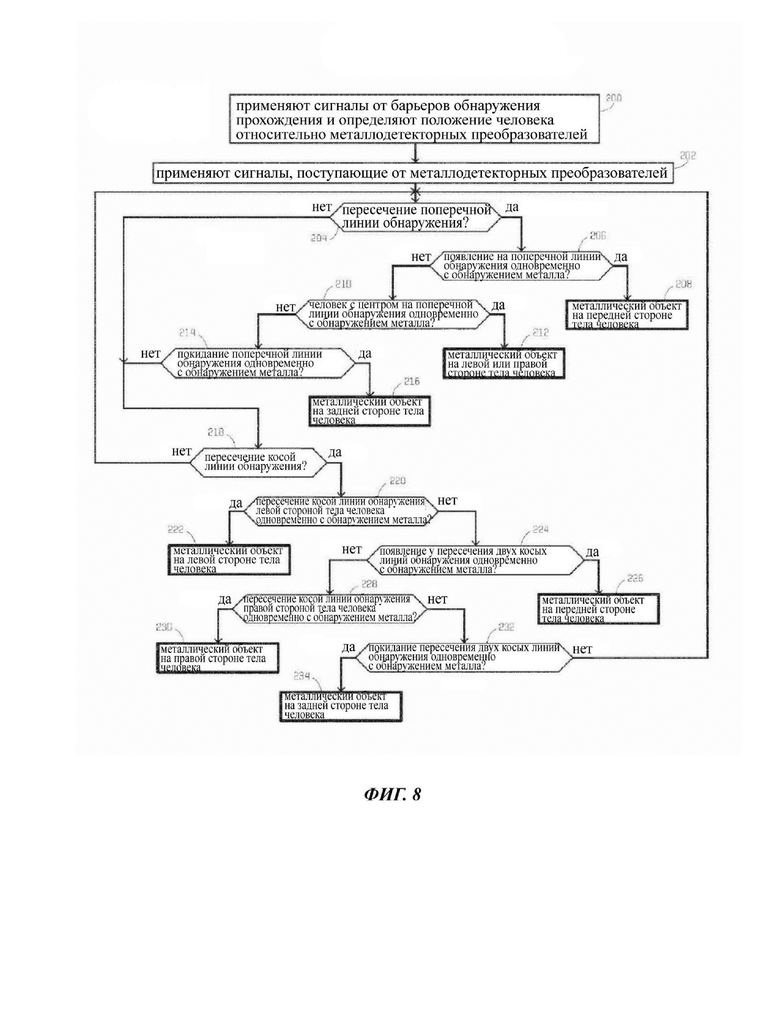
Фиг. 8 схематически изображает схему последовательности примера предлагаемого способа обнаружения,
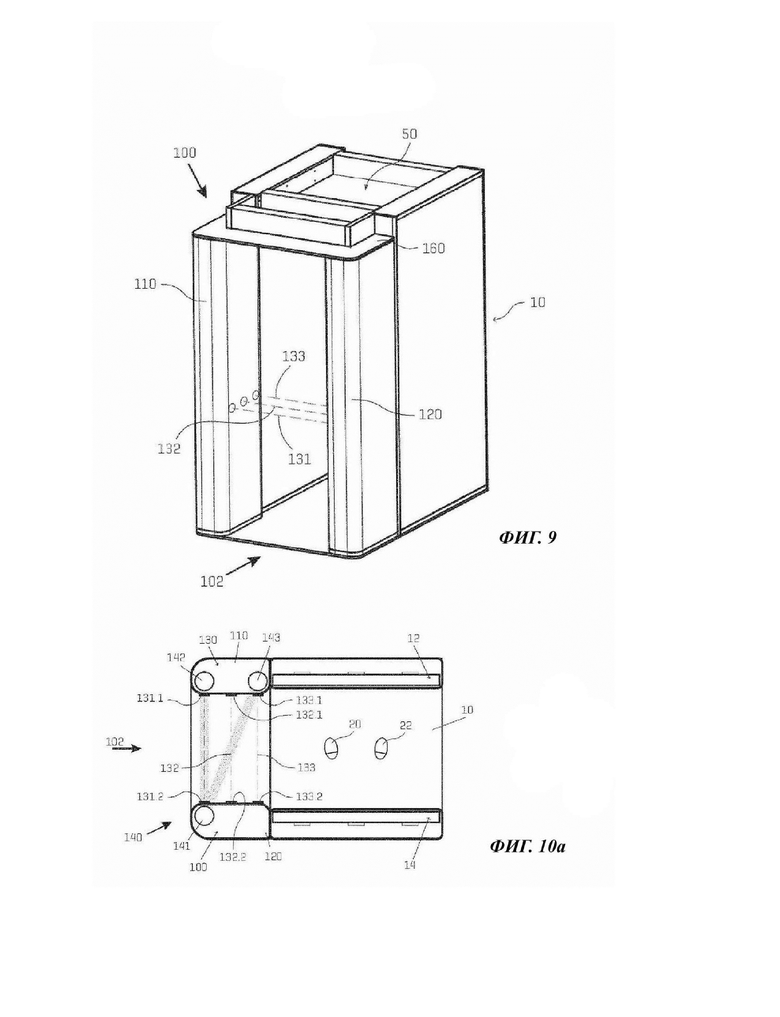
Фиг. 9 схематически изображает вид в аксонометрии предлагаемого устройства с металлодетектором, встроенным в сканер тела,
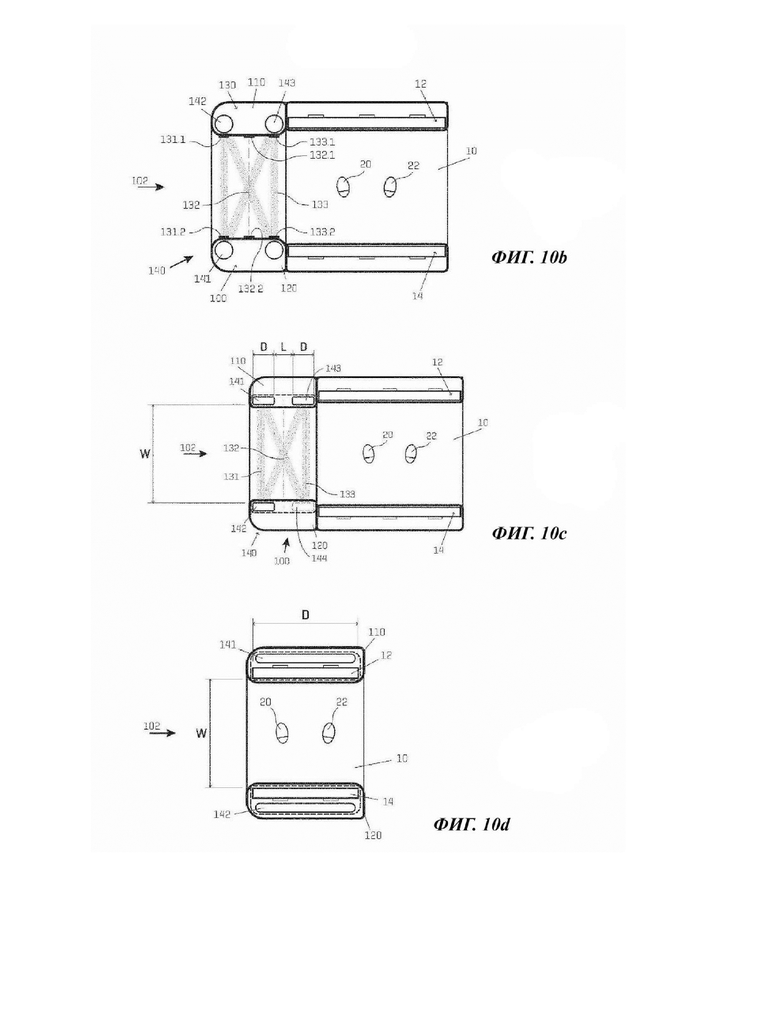
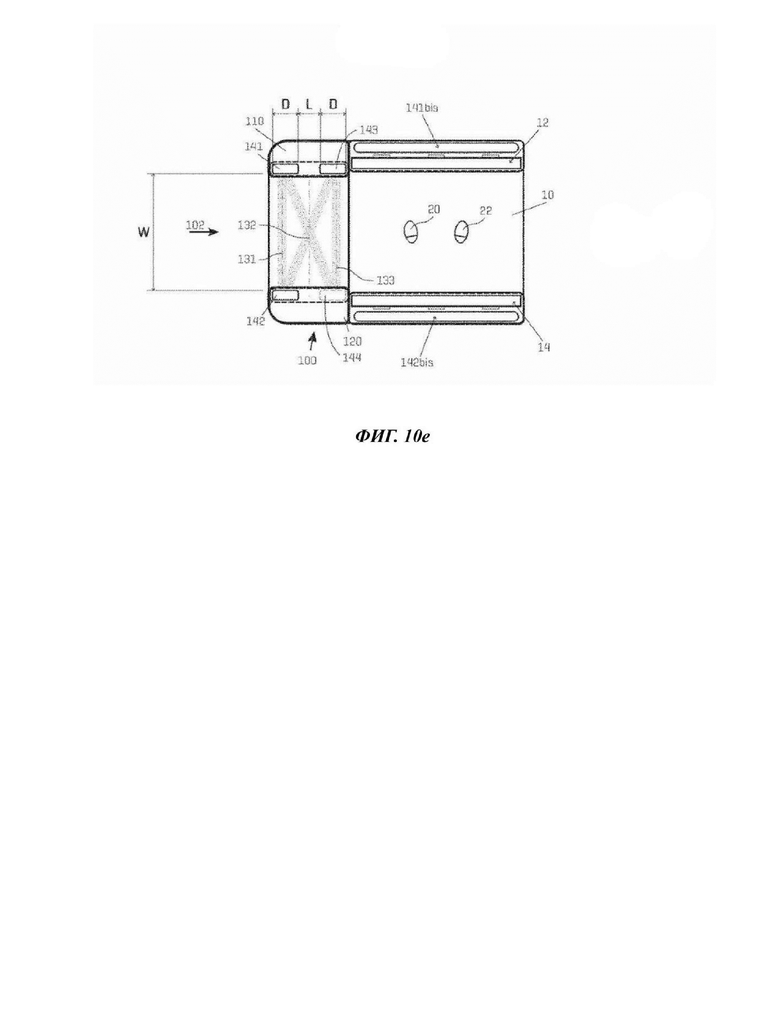
Фиг. 10а - 10е схематически изображают виды в горизонтальном разрезе пяти альтернативных вариантов осуществления сканера по настоящему изобретению с встроенным в него металлодетектором, и
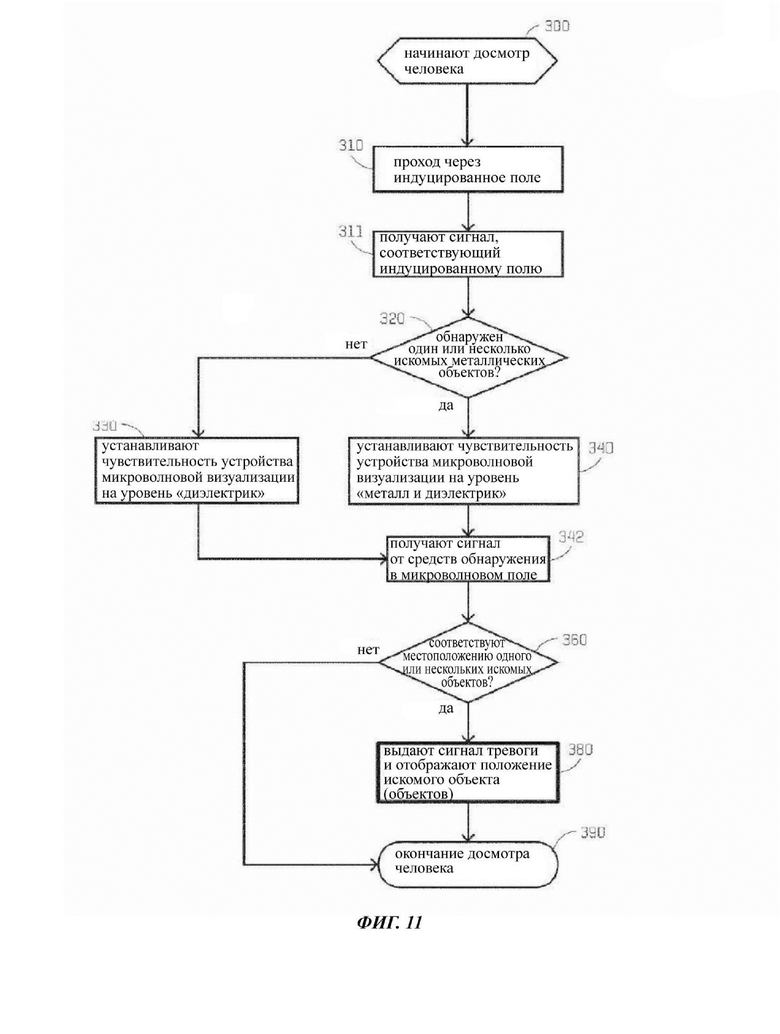
Фиг. 11 схематически изображает схему последовательности примера способа обнаружения с применением предлагаемого устройства, содержащего сканер тела с встроенным в него металлодетектором.
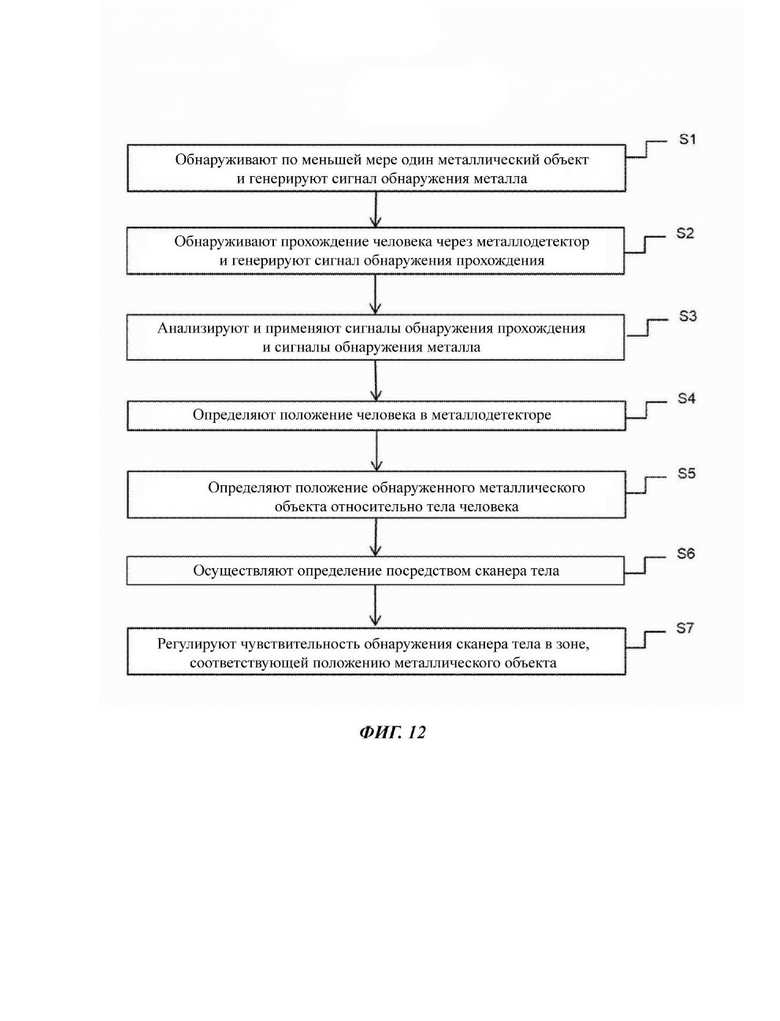
Фиг. 12 - схема последовательности, иллюстрирующая этапы способа обнаружения несомых человеком несанкционированных объектов по одному варианту осуществления изобретения.
Осуществление изобретения
Для улучшения обнаружения искомых объектов, которые могут быть замаскированы на теле человека, в настоящем изобретении предложена система обнаружения несомых людьми запрещенных объектов, согласно изобретению содержащая металлодетектор 100, содержащий преобразователи 141, 142, 143, по меньшей мере один барьер 130 обнаружения прохождения в металлодетекторе 100 и центральный блок 50, анализирующий сигналы, поступающие от барьеров 130 обнаружения прохождения и преобразователей 140, для определения на их основе части тела человека, на которой размещен указанный металлический объект М1, М2, М3.
Сначала будет раскрыта конструкция металлодетекторов 100, проиллюстрированных на Фиг. 1а, 1b, 1с и 1d.
Металлодетектор 100 индукционного типа предпочтительно образован арочным детектором, при этом последний содержит две вертикальные стойки или панели 110, 120, на которые установлена горизонтальная балка 160, как проиллюстрировано на Фиг. 1b.
Центральный блок 50 может быть размещен в любом месте в системе, например, в кожухе детектор 100, обычно на балке 160. Центральный блок 50 может, в частности, содержать процессор, микропроцессор, компьютер типа микроконтроллера, выполненные с возможностью исполнения инструкций.
Металлодетектор 100 образует канал или проход 102, по которому должен пройти человек для пересечения арочного детектора. Данный канал или проход 102 обрамлен двумя боковыми панелями 110, 120.
Боковые панели 110, 120 вмещают средства 140, образующие металлодетектор. Средства 140 предпочтительно образованы катушками, размещенными в соответствующих панелях 110, 120.
Технология металлообнаружения на основе катушек хорошо известна специалистам в данной области техники. Поэтому она не будет подробно описана ниже.
При этом следует напомнить, что металлодетекторы индукционного типа обычно содержат по меньшей мере одну передающую катушку, размещенную на одной стороне прохода 102, и по меньшей мере одну приемную катушку, размещенную на противоположной стороне прохода 102. Передающая катушка работает на переменном электрическом токе контролируемой частоты, предпочтительно - в каком-либо диапазоне определенных и контролируемых частот, с возможностью создания магнитного поля, обычно от 100 Гц до 50 кГц. Приемная катушка выполнена с возможностью обнаружения возмущений магнитного поля из-за присутствия металлического объекта в проходе 102 и перемещения данного металлического объекта в проходе 102, например, уменьшения амплитуды магнитного поля, или изменения фазы сигнала, например, из-за вихревых токов, возникающих на металлическом объекте.
На практике, каждая из передающих и приемных катушек предпочтительно образована множеством элементарных катушек или витков, охватывающих соответствующую часть арочного детектора по высоте для обеспечения возможности распознания положения обнаруженных искомых металлических объектов и, тем самым, определения местоположения этих искомых объектов по высоте.
Кроме того, каждая из катушек предпочтительно является попеременно передающей и приемной.
Фиг. 1 а изображает первый альтернативный вариант осуществления, в котором средства 140 образованы тремя катушечными преобразователями 141, 142, 143, распределенными между боковыми панелями 110, 120 по схеме, при которой по меньшей мере одна катушка 141 расположена в боковой панели 120, а две катушки 142, 143 - в противоположной боковой панели 110.
Кроме того, две катушки 142 и 143, расположенные в одной и той же боковой панели 110 или 120, продольно разнесены.
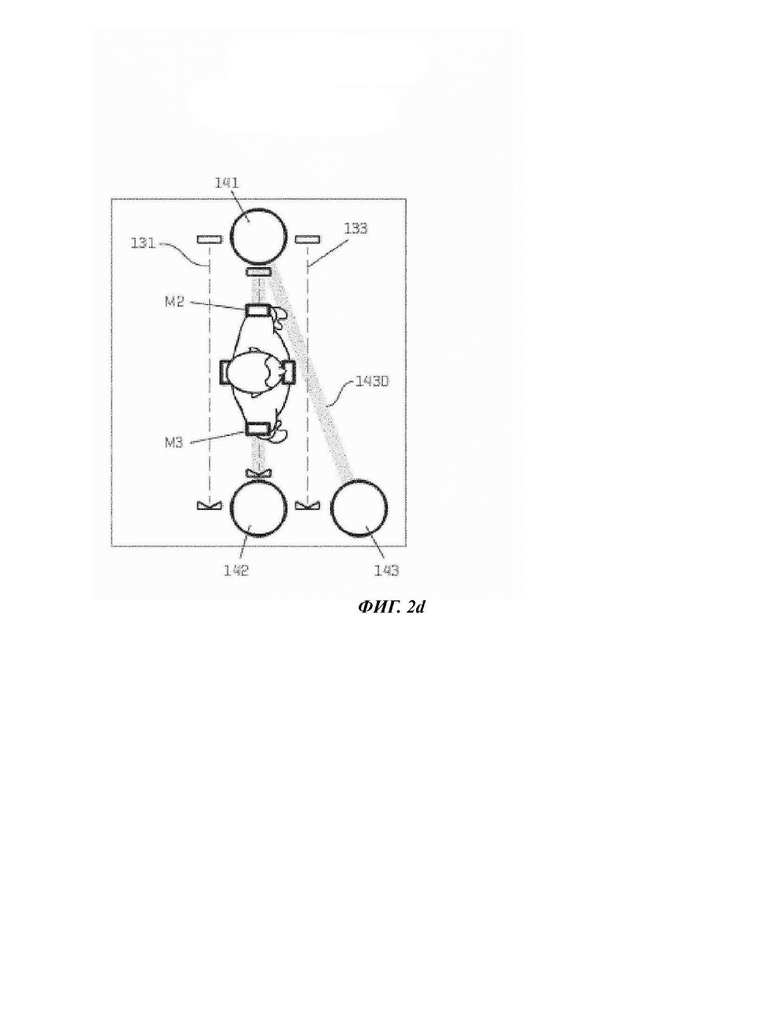
Как будет разъяснено ниже, данная конфигурация позволяет обнаруживать металл с определением местоположения металла в трех измерениях. Возможность определения местоположения в трех измерениях обеспечена за счет того, что человек последовательно пересекает несколько предпочтительных линий обнаружения, соответствующих воображаемым линиям, соединяющим центры соответственно передающих и приемных катушек. Так, если произвольно принять, что катушка 141, расположенная на одной стороне детектора 100, является передающей, а две катушки 142 и 143, расположенные на противоположной стороне детектора 100, являются приемными, то человек, перемещающийся в детекторе 100, последовательно пересекает первую предпочтительную линию 141D, соединяющую преобразователи 141 и 142 и проходящую поперечно направлению движения в металлодетекторе, а затем вторую предпочтительную линию 143D, соединяющую преобразователи 141 и 143 и ориентированную по косой к направлению движения в металлодетекторе.
Фиг. 1 b изображает альтернативный вариант осуществления, в котором средства 140 образованы четырьмя катушечными преобразователями 141, 142, 143 и 144, распределенными между боковыми панелями 110, 120 по схеме, при которой две катушки 141 и 144 расположены в боковой панели 120 и две катушки 142, 143-в противоположной боковой панели 110.
Две катушки 141 и 144, расположенные в одной и той же боковой панели 120, продольно разнесены. Две катушки 142 и 143, расположенные в другой одной и той же боковой панели 110, также продольно разнесены.
Данная конфигурация позволяет обнаруживать металл с определением местоположения металла в трех измерениях. Возможность определения местоположения в трех измерениях обеспечена за счет того, что человек последовательно пересекает несколько предпочтительных линий обнаружения, соответствующих воображаемым линиям, соединяющим центры соответственно передающих и приемных катушек. Так, если произвольно принять, что катушка
141, расположенная на одной стороне детектора 100, является передающей, а две катушки 142 и 143, расположенные на противоположной стороне детектора 100, являются приемными, то человек, перемещающийся в детекторе 100, последовательно пересекает первую поперечную предпочтительную линию 141D, соединяющую преобразователи 142 и 141, а затем вторую косую (проходящую по косой) предпочтительную линию 143D, соединяющую преобразователи 141 и 143. Аналогичным образом, если произвольно принять, что катушка 144, расположенная на одной стороне детектора 100, является передающей, а две катушки 142 и 143, расположенные на противоположной стороне детектора 100, являются приемными, то человек, перемещающийся в детекторе 100, последовательно пересекает косую предпочтительную линию 142D, соединяющую преобразователи 144 и 142, а затем поперечную предпочтительную линию 144D, соединяющую преобразователи 144 и 143.
Преобразователи 142 и 143 предпочтительно расположены так, что они обращены соответственно к преобразователям 141 и 144.
Также следует напомнить, что каждый из четырех преобразователей 141, 142, 143 и 144 выполнен с возможностью работы попеременно в режиме передачи или в режиме приема.
Как видно из Фиг. 1а и 1b, преобразователи 141, 142, 143 и 144 выполнены в виде катушек, навитых на соответствующие стойки.
Ширина D каждой стойки преобразователей 141, 142, 143 и 144 на Фиг. 1а и 1b предпочтительно составляет от 140 до 300 мм, промежуток L между двумя соседними стойками 141 и 144 или 142 и 143 предпочтительно больше ширины D в 1.5 - 3 раза, а именно - составляет от 210 мм до 900 мм, а расстояние между центрами пар преобразователей, таким образом, составляет от 350 мм до 1200 мм, при этом поперечное расстояние W между стойками двух противоположных преобразователей 141 и 142 или 144 и 143 предпочтительно составляет от 680 до 820 мм.
Таким образом, угол, образованный между поперечными линиями 141D и 144D обнаружения, соединяющими пары противоположных преобразователей 141 и 142 с одной стороны и 144 и 143 с другой стороны, и косыми линиями 142D и 143D обнаружения, соединяющими пары расположенных по диагонали преобразователей, составляет от 15° до 60° или обычно порядка 30° - 45°.
Данный угол важен, в частности, для обеспечения возможности определения местоположения искомых металлических объектов по ширине тела человека, то есть определения того, расположены ли искомые металлические объекты на правой или на левой стороне тела человека. Образуя линии 142D и 143D обнаружения, проходящие по косой к направлению движения человека, данный угол задает линии (142/144, 143/141, 144/142, 141/143) обнаружения, пересекаемые первыми или последними одной из сторон тела человека.
В свою очередь, определение местоположения искомых металлических объектов на передней или на задней стороне тела человека осуществляют, в частности, тогда, когда передняя или задняя часть тела человека пересекает поперечные линии 141D и 144D (141/142, 143/144, 142/141, 144/143) обнаружения.
При этом центральный блок 50 применяет все данные, полученные всеми приемными преобразователями 141, 142, 143 и 144, для указания местоположения искомых металлических объектов на левой / правой, передней / задней сторонах тела. Разумеется, обнаруженные металлические объекты, независимо от того, где они расположены - на левой или на правой, на передней или на задней стороне тела человека, оказывают влияние при пересечении линии обнаружения, будь то поперечной или проходящей по косой.
Фиг. 1 с изображает альтернативный вариант осуществления, схожий с вариантами на Фиг. 1а и 1b, но вместо стоечных преобразователей 141, 144 и 142, 143 на Фиг. 1а и 1b содержащий панельные преобразователи. На Фиг. 1 с необязательный вариант стремя панельными преобразователями 141, 142, 143 представлен сплошными линиями. Необязательный вариант с четырьмя панельными преобразователями 141, 142, 143, 144 также представлен в виде четырех преобразователей 144 пунктирными линиями.
Ширина D каждой панели преобразователей 141, 142, 143 и 144, представленной на Фиг. 1с, предпочтительно составляет от 140 до 600 мм. Значения промежутка L между преобразователями, поперечное расстояние W между преобразователями и угол между образованными таким образом поперечными и косыми линиями обнаружения, указанные для Фиг. 1а и 1b, также применимы к Фиг. 1с.
Боковые панели 110, 120 также вмещают средства 130, образующие барьеры обнаружения прохождения, распределенные продольно по пути перемещения в проходе 102.
Барьеры 130 обнаружения прохождения могут быть сформированы по любой известной технологии, в качестве неограничивающего примера - в виде оптических барьеров.
Частный вариант осуществления на Фиг. 1 содержит три следующих друг за другом барьера 131, 132 и 133 обнаружения прохождения вдоль пути перемещения в металлодетекторе 100.
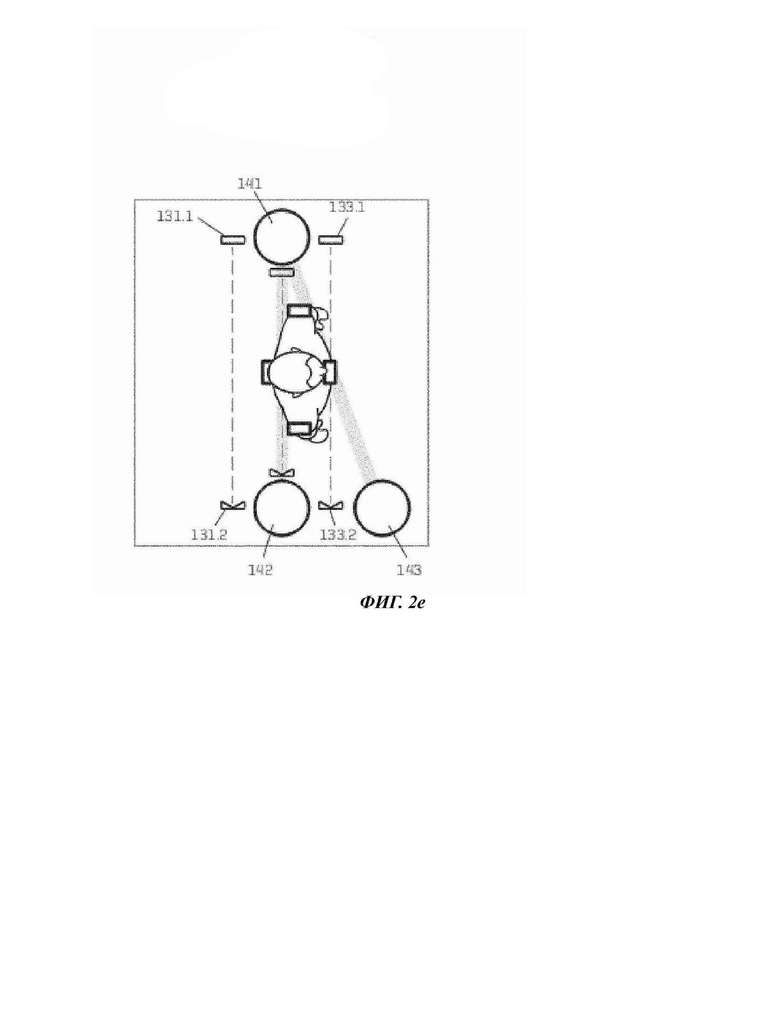
На практике, каждый барьер обнаружения прохождения может содержать передатчики 131.1, 132.1, 133.1, размещенный в одной из панелей 110 или 120, и приемники 131.2, 132.2, 133.2, размещенные друг напротив друга в противоположных панелях 120 или 110. Приемник принимает сигнал от расположенного напротив передатчика, если между данным приемником и данным передатчиком отсутствует препятствие. При этом приемник не принимает сигнал, испущенный противоположным передатчиком, когда между передатчиком и приемником стоит человек.
Соответствующие сигналы, принимаемые приемниками 131.2, 132.2, 133.2, когда человек перемещается по каналу 102, проиллюстрированы на Фиг. 4а, 4b и 4с и на Фиг. 7а, 7b и 7с.
Как видно из Фиг. 4а, 4b и 4с, а также из Фиг. 7а, 7b и 7с, происходит последовательное изменение состояния на выходе приемников 131.2, 132.2, 133.2 в соответствии с положительной или отрицательной логикой в ходе продвижения человека в проходе 102.
Расположение барьеров 130, 131, 132 и 133 обнаружения прохождения и металлодетекторных преобразователей 140, 141, 142 и 143 относительно друг друга может быть предметом разных вариантов осуществления и не ограничено вариантами осуществления, проиллюстрированными на прилагаемых фигурах. Например, следует отметить, что расположение охранных барьеров на Фиг. 1а, 1b и 1с отлично от проиллюстрированного на Фиг. 2 и 5.
В варианте осуществления, схематически представленном на Фиг. 1, преобразователи 141 и 142 размещены друг напротив друга по обе стороны прохода 102 в соответствующих панелях 110, 120 на одном и том же продольном уровне в направлении прохождения в проходе 102. Они задают основную поперечную линию 141 D обнаружения. Третий преобразователь 143 расположен со смещением дальше по направлению прохождения в проходе 102 относительно преобразователя 142 в той же панели 110. Он задает, в комбинации с преобразователем 141, основную косую линию 143D обнаружения. Аналогичным образом, четвертый преобразователь 144 расположен со смещением дальше по направлению прохождения в проходе 102 относительно преобразователя 141 в той же панели 120 и обращен к преобразователю 143. Он задает, в комбинации с преобразователем 143, основную поперечную линию 144D обнаружения и задает, в комбинации с преобразователем 142, косую линию 142D обнаружения.
По меньшей мере один барьер 130 обнаружения прохождения предпочтительно совпадает в продольном положении с парой преобразователей
140 и, как следствие, с предпочтительной поперечной линией 141D или 144D обнаружения. Как видно из Фиг. 1 и 5, барьер 131 совпадает с парой преобразователей 141 - 142, а барьер 133 совпадает с парой преобразователей 143 - 144. Как видно из Фиг. 2, барьер 132 совпадает с парой преобразователей
141 -142.
Кроме того, по меньшей мере один барьер 130 обнаружения прохождения предпочтительно совпадает в продольном положении с точкой пересечения двух косых линий 142D и 143D обнаружения. Как видно из Фиг. 1 и 5, барьер 132 совпадает с точкой пересечения двух косых линий 142D и 143D обнаружения.
В варианте осуществления, схематически представленном на Фиг. 1, первый барьер 131 обнаружения прохождения, образованный передатчиком 131.1 и приемником 131.2, расположен у пары преобразователей 141 и 142, то есть на входе металлодетектора 100. Центральный барьер 132 обнаружения прохождения, образованный передатчиком 132.1 и приемником 132.2, расположен между парой преобразователей 141 и 142 и третьим преобразователем 143 или парой преобразователей 143 и 144. Третий барьер 133 обнаружения прохождения, образованный передатчиком 133.1 и приемником 133.2, расположен у преобразователей 143 и 144.
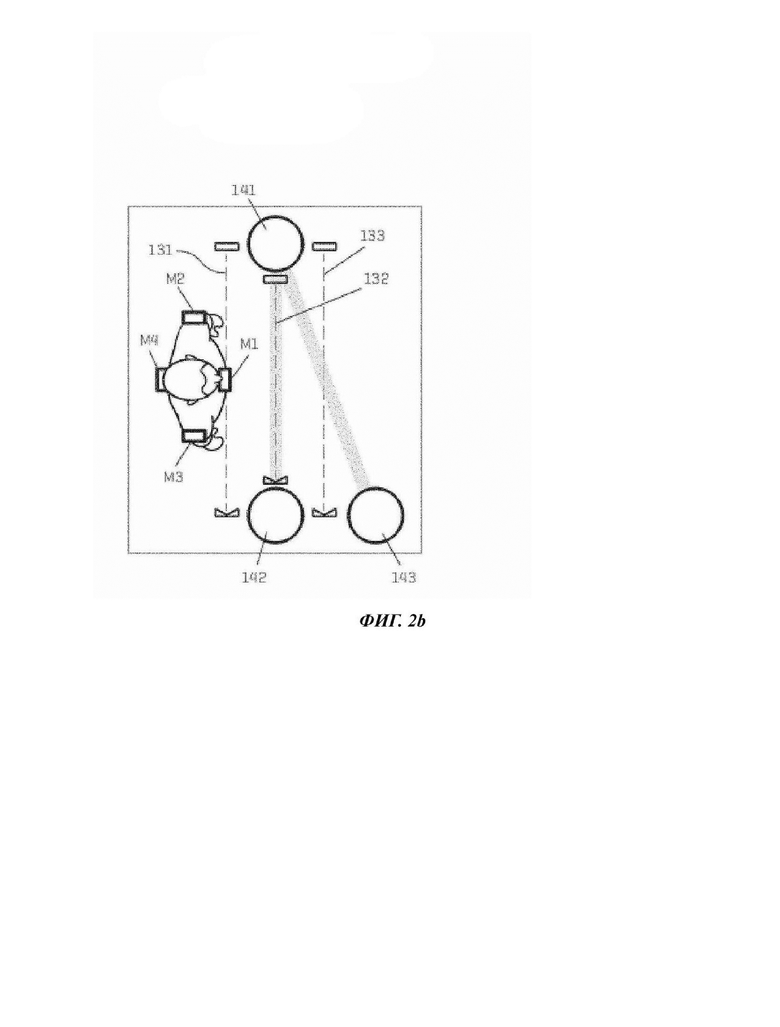
Как сказано выше, расположение барьеров 131, 132 и 133 обнаружения прохождения относительно преобразователей 140 может быть предметом альтернативных вариантов осуществления. В варианте осуществления на Фиг. 2 первый барьер 131 обнаружения прохождения, образованный передатчиком 131.1 и приемником 131.2, расположен по ходу движения перед парой преобразователей 141 и 142 на входе металлодетектора 100, центральный барьер 132 обнаружения прохождения, образованный передатчиком 132.1 и приемником 132.2, расположен у пары преобразователей 141 и 142, а третий барьер 133 обнаружения прохождения, образованный передатчиком 133.1 и приемником 133.2, расположен между парой преобразователей 141 и 142 и расположенными за ними по ходу движения преобразователями 143 и 144.
Для улучшения определения положения металлических объектов М1, М2, М3, М4, несомых человеком, досматриваемым системой, центральный блок 50 выполнен с возможностью анализа и применения сигналов, поступающих от барьеров 130 обнаружения прохождения, и сигналов, поступающие от преобразователей 140, и определения, на основе их комбинированного применения, относительного положения металлического объекта(-ов) М1, М2, М3, М4 на теле человека.
Следует отметить, что сигналы, поступающие от указанных по меньшей мере трех преобразователей 141, 142, 143 позволяют, за счет наличия поперечных и косых линий обнаружения, определять положение металлического объекта на теле человека по его ширине, то есть определять, расположен ли металлический объект скорее на правой или на левой стороне тела человека. При этом эти линии обнаружения сами по себе не обеспечивают возможность определения положения металлического объекта в направлении в глубину, то есть определения того, расположен ли обнаруженный преобразователями металлический объект на передней или на задней стороне тела человека.
При этом сигналы, поступающие от барьеров 130 обнаружения прохождения, обеспечивают возможность определения центральным блоком 50 положения человека относительно преобразователей 140, а именно - положения передней стороны тела человека. Таким образом, барьеры 130 обнаружения прохождения обеспечивают возможность определения центральным блоком 50 ориентира для передней стороны тела человека, то есть установления границы начала тела человека.
Например, если детектор 100 содержит барьер 132 обнаружения прохождения у первой пары противоположных друг другу преобразователей 141, 142 (в направлении прохождения человека в детекторе 100), то когда человека проходит через детектор 100, барьер 132 обнаруживает его прохождение и генерирует сигнал обнаружения прохождения. На его основе центральный блок 50 определяет положение, в момент времени t, передней стороны тела человека. Если указанная первая пара преобразователей 141, 142 не обнаружит какой-либо металлический объект в момент времени t, соответствующий прохождению передней стороны тела человека, центральный блок 50 определяет на основании этого то, что человек не несет какой-либо металлический объект М1 на передней стороне тела. При этом в случае обнаружения металлического объекта М1-М4 первой парой преобразователей 141, 142 в момент, отстоящий от момента времени t сигнала обнаружения прохождения, сгенерированного барьером 132, центральный блок 50 определяет на основании этого то, что металлический объект М4 расположен на задней стороне тела человека, а не на его передней стороне.
Та же логика применима в случае, когда первый барьер 130 обнаружения прохождения расположен со смещением относительно первого преобразователя, с учетом сдвига по времени из-за расстояния, в направлении прохождения человека, между барьером 130 обнаружения и парой преобразователей 141, 142.
В одном варианте осуществления детектор 100 содержит несколько барьеров 131, 132, 133 обнаружения прохождения. Данный вариант осуществления позволяет дополнительно улучшить определение положения металлических объектов М1-М4 на теле человека, в частности - при пересечении косых линий обнаружения и возможной поперечной линии обнаружения, образованных между двумя другими парами расположенных друг напротив друга преобразователей 143, 144, а также подтверждать обнаружение металлических объектов М1-М4 и определять их местоположение на теле человека (см., в частности, схему последовательности на Фиг. 8, этапы 208/226 и 216/234).
Далее на примерах Фиг. 2, 3 и 4 будут раскрыты основные этапы предлагаемого способа с применением металлодетектора с тремя индукционными преобразователями 141, 142 и 143 того типа, что проиллюстрирован на Фиг. 1а.
Три преобразователя 141, 142 и 143 в комбинации обеспечивают возможность распознания в пространстве местоположения обнаруженных металлических объектов.
При этом, и как раскрыто выше, анализ изменения сигналов, поступающих от барьеров 130 обнаружения прохождения, представленных на Фиг. 4а, 4b и 4с, позволяющий определять положение человека в металлодетекторе 100 и, следовательно, относительно преобразователей 140, в комбинации с анализом сигналов, поступающих от металлодетекторных преобразователей 140, обеспечивает возможность как обнаружения металлического объекта, несомого человеком, так и определения в трех измерениях местоположения данного объекта на теле человека.
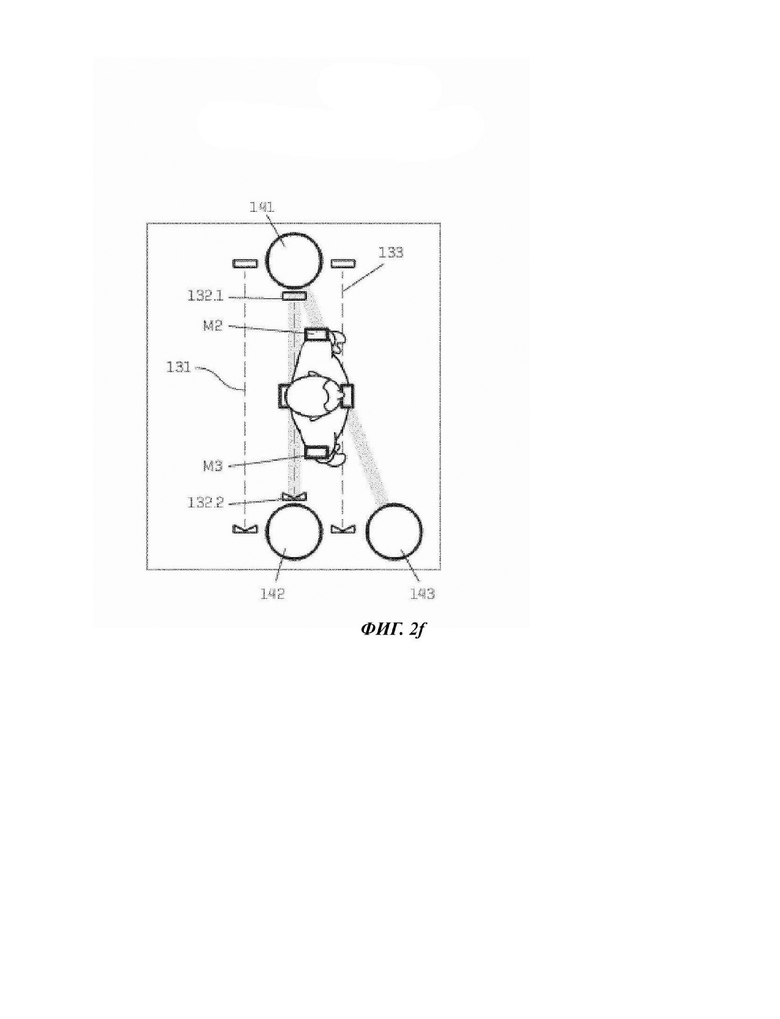
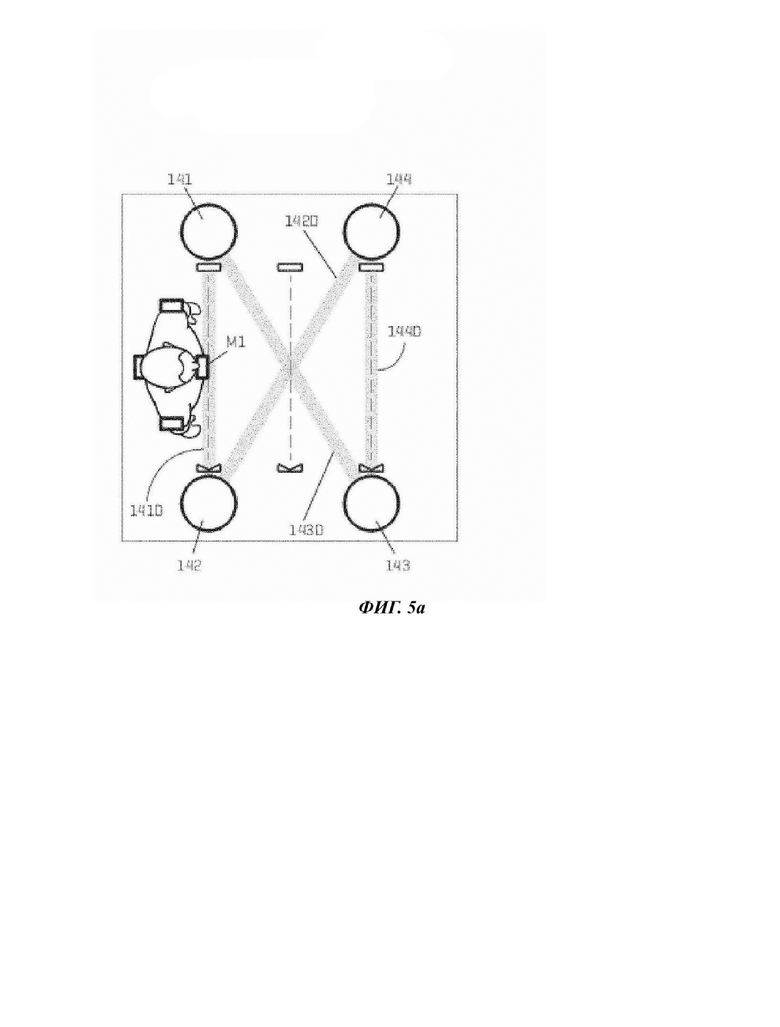
Фиг. 2, 3 и 4 условно иллюстрируют случай прохождения через предлагаемый арочный металлодетектор 100 человека, несущего металлические объекты М1 на передней стороне, М4 на задней стороне, а также М2 и М3 на левой и правой сторонах тела.
S1, S2, S3 и S4 на Фиг. 3а обозначают 4 составляющие сигнала, поступающие от приемного преобразователя 142, связанного с передающим преобразователем 141, во время последовательного прохождения масс М1, М2, М3 и М4 через поперечную линию 141D обнаружения.
S10, S20, S30 и S40 на Фиг. 3b обозначают 4 составляющие сигнала, поступающие от приемного преобразователя 143, связанного с передающим преобразователем 141, во время последовательного прохождения масс М1, М2, М3 и М4 через косую линию 143D обнаружения.
Из неограничивающих примеров на прилагаемых Фиг. 2, 3 и 4 можно понять, что:
обнаружение сигнала S1 на преобразователе 142 в комбинации с сигналами, поступающими от барьера 132, при достижении человеком барьера 132 и поперечной линии 141 D обнаружения, что соответствует положению на Фиг. 2 с, позволяет обнаружить присутствие металлического объекта М1, размещенного на передней стороне тела человека;
обнаружение металла посредством сигнала S2 и S3, поступающего от преобразователя 142 при пересечении человеком поперечной линии 141D обнаружения, соединяющей передатчик 141 и приемник 142, что соответствует положению на Фиг. 2d (пересечение, обнаруженное барьером 132) позволяет сгенерировать дополнительное оповещение о присутствии металла, заранее интерпретируемое как присутствие по меньшей мере одного металлического объекта на по меньшей мере одной стороне тела человека;
обнаружение сигнала S4 на преобразователе 142 при покидании человеком барьера 132 (который, следовательно, перестает обнаруживать присутствие человека) и поперечной линии 141D обнаружения, что соответствует положению на Фиг. 2g, позволяет обнаружить присутствие металлического объекта М4, размещенного на задней стороне тела человека,
обнаружение сигнала S10 на преобразователе 143 и сигнала, поступающего от барьера 133, при достижении человеком барьера 133 и косой линии 143D обнаружения, что соответствует положению на Фиг. 2е, позволяет подтвердить присутствие металлического объекта М1 на передней стороне тела человека;
обнаружение сигнала S20 на том же преобразователе 143 при продолжении пересечения человеком барьера 133 и косой линии 143D обнаружения, как проиллюстрировано на Фиг. 2f, позволяет обнаружить присутствие металлического объекта М2 на левой стороне тела человека;
обнаружение сигнала S30 на том же преобразователе 143, когда человек все еще продолжает пересекать барьер 133 и косую линию 143D обнаружения, как проиллюстрировано на Фиг. 2h, позволяет обнаружить присутствие металлического объекта М3 на правой стороне тела человека, и
обнаружение сигнала S40 на преобразователе 143 при покидании человеком барьера 133 (который, следовательно, перестает обнаруживать присутствие человека) и косой линии 143D обнаружения, что соответствует положению на Фиг. 21, позволяет подтвердить присутствие металлического объекта М4 на задней стороне тела человека.
Высотное местоположение объектов М1, М2, М3 и М4 на теле человека определяют известным способом в зависимости от методики металлообнаружения в известных арочных детекторах, в частности - за счет разбиения катушек по высоте для создания обособленных зон обнаружения по высоте.
Выше был раскрыт пример осуществления, в котором преобразователь 141 является передающим, а преобразователи 142 и 143, размещенные на противоположной стороне, являются приемными преобразователями.
При этом возможна и обратная компоновка, а именно - с приемным преобразователем 141 и передающими преобразователями 142 и 143, размещенными на противоположной стороне.
Анализ сигналов, поступающих от преобразователей 141, 142 и 143, совместно с анализом сигналов, поступающих от барьеров 131, 132 и 133 обнаружения прохождения, осуществляют идентичным образом.
При этом, в данном случае, сигналы, проиллюстрированные на Фиг. 3а и 3b, соответствуют сигналам, принимаемым на приемнике 141, когда преобразователи 142 и 143 являются соответственно передающими преобразователями. Данные сигналы можно отличить по соответствующим особым частотам передатчиков 142 и 143.
Каждый из преобразователей 141, 142 и 143 предпочтительно выполнен с возможностью применения попеременно и последовательно в качестве передатчика и приемника. Это обеспечивает избыточность сигналов, позволяющую подтверждать обнаружение и повысить его надежность.
Фиг. 3с и 3d схематически изображают сигналы, поступающие от приемных преобразователей 142 и 143 в гипотетическом случае, когда металлический объект целиком опоясывает участок тела досматриваемого человека, например, опоясывает талию человека. Как видно из Фиг. 3с, в данном случае запуск сигнала обнаружения металлического объекта имеет место, как только барьер 132 обнаружения сгенерирует сигнал обнаружения присутствия при начале пересечения человеком барьера 132 обнаружения и поперечной линии 141D обнаружения, как проиллюстрировано на Фиг. 2с, а окончание - когда барьер 132 обнаружения перестает обнаруживать присутствие человека, то есть после того, как человек пройдет барьер 132 и поперечную линию 141D обнаружения, как проиллюстрировано на Фиг. 2g. Аналогичным образом, как видно из Фиг. 3d, запуск сигнала обнаружения металлического объекта имеет место, как только барьер 133 обнаружения сгенерирует сигнал обнаружения присутствия при начале пересечения человеком косой линии 143D обнаружения, как проиллюстрировано на Фиг. 2е, а окончание - когда барьер 133 обнаружения перестает обнаруживать присутствие человека, то есть после того, как человек пройдет барьер 133 обнаружения и косую линию 143D обнаружения, как проиллюстрировано на Фиг. 2i
Если искомый металлический объект сформирован не в виде сплошного пояса, опоясывающего человека, а в виде ряда отдельных объектов, рассредоточенных по периметру тела человека, то сигнал, поступающий от приемных преобразователей 142 и 143, будет образован серией импульсов, распределенных во времени от начала до конца пересечения барьеров 132, 133 обнаружения и поперечной 141D и косой 143D линий обнаружения, аналогично показанному на Фиг. 3а и 3b
Фиг. 5 представляет другой альтернативный вариант осуществления, в котором металлодетектор 100 содержит четыре преобразователя 141, 142, 143 и 144, образующих два передатчика и два приемника, размещенные по схеме, при которой два преобразователя расположены на первой стороне прохода 102 и два преобразователя размещены на противоположной стороне указанного прохода 102 в соответствующих боковых панелях 110 и 120, согласно Фиг. 1b.
Напомним, что преобразователи 141, 142, 143 и 144 выполнены с возможностью попеременного образования передатчика и приемника. Когда он образует передатчик, он предпочтительно взаимодействует с двумя приемниками, размещенными на противоположной стороне прохода 102. Когда он образует приемник, он предпочтительно взаимодействует с двумя передатчиками, размещенными на противоположной стороне прохода 102.
Таким образом, четыре преобразователя 141, 142, 143 и 144 образуют четыре основные зоны или линии 141D, 144D, 143d и 142D обнаружения, образованные соответственно между преобразователями 141 и 142, 144 и 143, 141 и 143, 144 и 142.
Частота сигналов, испускаемых передатчиком 140 и обнаруживаемых соответственно на двух связанных с ним приемниках предпочтительно отличается в зависимости от приемника, при этом, аналогичным образом, частота сигналов, испускаемых двумя передатчиками 140 и предназначенных для обнаружения одним и тем же приемником, отличается в зависимости от передатчика для обеспечения возможности различения исследуемой основной зоны или линии 141D, 142D, 143D или 144D обнаружения.
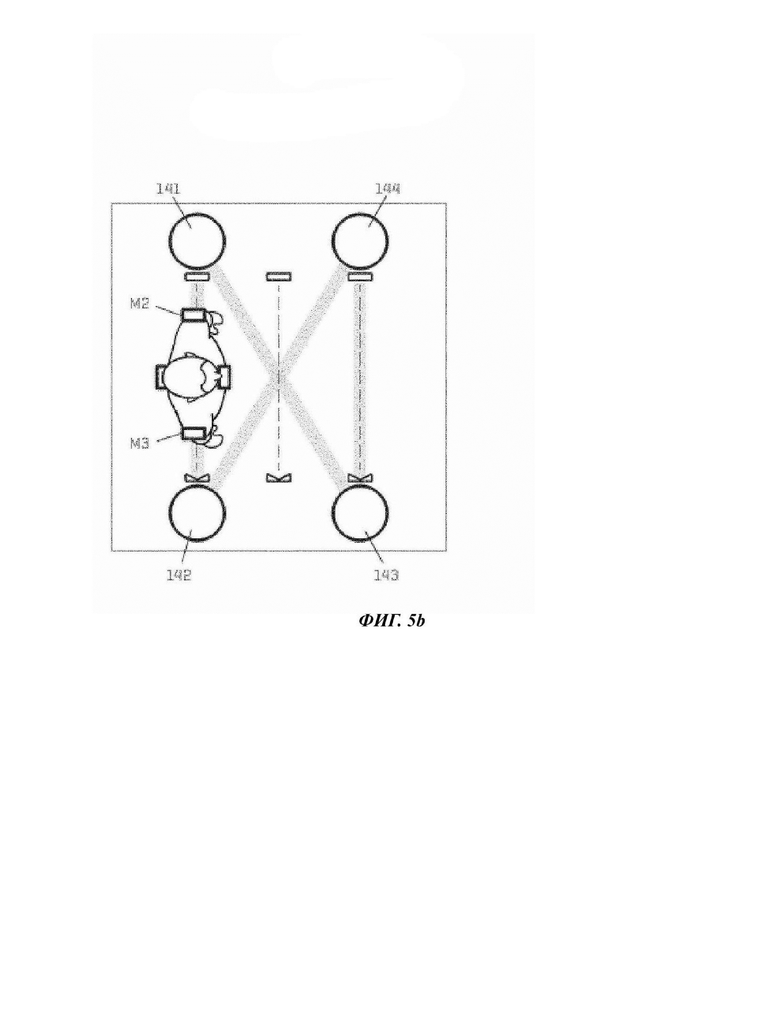
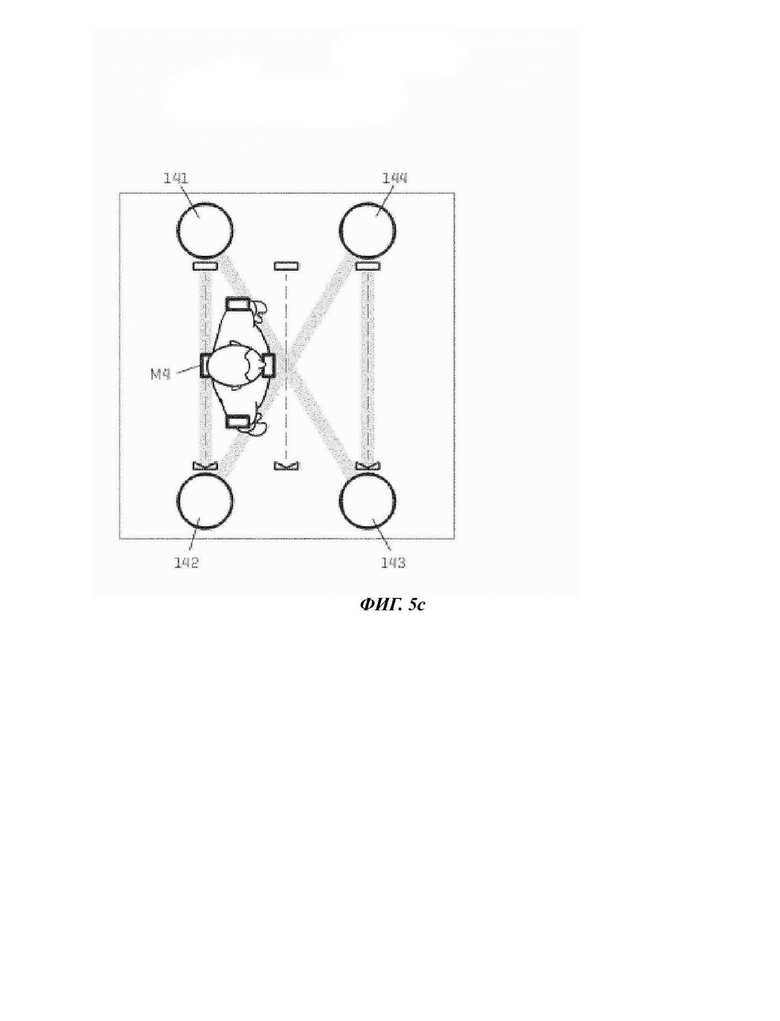
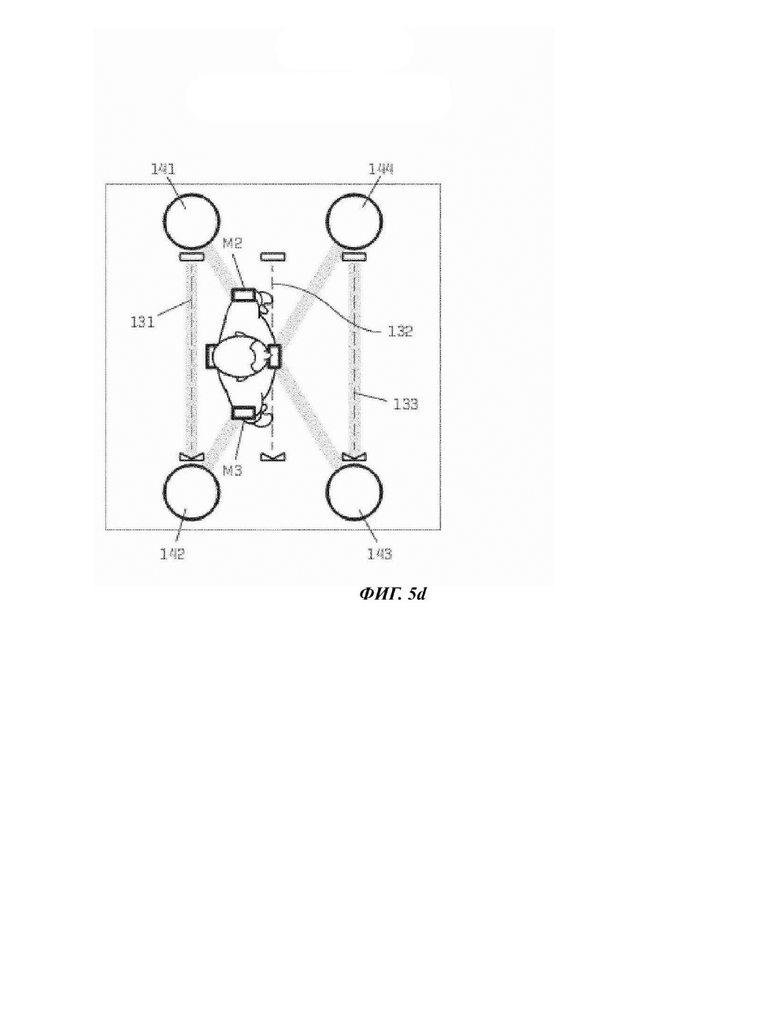
Далее будут раскрыты основные этапы предлагаемого способа с применением металлодетектора с четырьмя индукционными преобразователями 141, 142, 143, 144 того типа, что проиллюстрирован на Фиг. 1b, на примерах Фиг. 5, 6 и 7, также условно изображающих случай прохождения через предлагаемый арочный металлодетектор 100 человека, несущего металлические объекты М1 на передней стороне тела, М4 на задней стороне тела, а также М2 и М3 на левой и правой сторонах тела.
Фиг. 6а представляет сигнал S1, S2, S3, S4, поступающий от приемного преобразователя 142, когда обращенный к нему преобразователь 141 является передающим преобразователем.
Фиг. 6b представляет сигнал S10, S20, S30, S40, поступающий от приемного преобразователя 143, когда расположенный по диагонали преобразователь 141 является передающим преобразователем.
Фиг. 6с представляет сигнал S11, S21, S31, S41, поступающий от приемного преобразователя 142, когда расположенный по диагонали преобразователь 144 является передающим преобразователем.
Фиг. 6d представляет сигнал S12, S22, S32, S42, поступающий от приемного преобразователя 143, когда обращенный к нему преобразователь 144 является передающим преобразователем.
Напомним, что в варианте осуществления на Фиг. 5 указанные четыре преобразователя 141, 142, 143 и 144 связаны с тремя следующими друг за другом барьерами 131, 132 и 133 обнаружения прохождения вдоль пути перемещения в металлодетекторе 100.
В частном неограничивающем варианте осуществления на Фиг. 5, входной барьер 131 совпадает с поперечной линией 141D обнаружения и парой преобразователей 141 и 142, выходной барьер 133 совпадает с поперечной линией 144D обнаружения и парой преобразователей 143 и 144, а промежуточный барьер 132 совпадает с точкой пересечения двух косых линий 143D и 144D обнаружения.
Барьеры 130 обнаружения прохождения, как и в предыдущем варианте, могут быть сформированы по любой известной технологии, в качестве неограничивающего примера - в виде оптических барьеров.
На практике, каждый барьер обнаружения прохождения может содержать, как и на Фиг. 2, передатчик 131.1, 132.1, 133.1, размещенный в одной из панелей 110 или 120, и приемник 131.2, 132.2, 133.2, размещенные друг напротив друга в противоположной панели 120 или 110. Приемник принимает сигнал от расположенного напротив передатчика, если между данным приемником и данным передатчиком отсутствует препятствие. При этом приемник не принимает сигнал, испущенный обращенным к нему передатчиком, когда между передатчиком и приемником стоит человек.
Соответствующие сигналы, принимаемые на приемниках 131.2, 132.2,133.2, когда человек перемещается по каналу 102, проиллюстрированы на Фиг. 7а, 7b и 7с.
Как видно из Фиг. 7а, 7b и 7 с, происходит последовательное изменение состояния на выходе приемников 131.2, 132.2, 133.2 в соответствии с положительной или отрицательной логикой в ходе продвижения человека в проходе 102.
Относительное расположение барьеров 131, 132 и 133 обнаружения прохождения и металлодетекторных преобразователей 140 может быть предметом разных вариантов осуществления и не ограничено размещением на Фиг. 5.
В частности, следует понимать, что в неограничивающих примерах на прилагаемых Фиг. 5, 6 и 7:
возможность обнаружения металлического объекта М1, несомого человеком на передней стороне тела, обеспечена за счет барьеров 131 и 133 обнаружения прохождения (в комбинации с сигналами S1, S10, S11 и S12), сигналы которых позволяют центральному блоку 50 определить то, что человек достиг и начинает пересекать линии 141D и 144D обнаружения, образованные соответственно между парой преобразователей 141 и 142 и парой преобразователей 143 и 144 (эти положения представлены на Фиг. 5а и 5f и соответствуют пересечению барьеров 131 и 133 прохода), а также то, что человек достиг пересечения линий 142D и 143D обнаружения и центрального барьера 132 прохода, как показано на Фиг. 5d;
металлический объект М2 на левой стороне тела человека может быть обнаружен (сигнал S20, S21) при пересечении человеком первой косой линии 143D обнаружения, образованной между преобразователями 141 и 143 (данное положение представлено на Фиг. 5 с1) или при пересечении человеком второй косой линии 142D обнаружения, образованной между преобразователями 142 и 144 (данное положение представлено на Фиг. 5е). В данном случае, также может быть обнаружен металлический объект М2 на левой стороне тела человека (сигнал S2, S22) при пересечении поперечных линий 141D и 144D обнаружения, совпадающих с барьерами 131 и 133, как проиллюстрировано на Фиг. 5b и 5g;
• металлический объект М3 на правой стороне тела человека может быть обнаружен (сигнал S30, S31) при пересечении человеком первой линии 142D обнаружения, образованной между преобразователями 142 и 144 (данное положение также представлено на Фиг. 5d), или при пересечении человеком второй косой линии 143D обнаружения, образованной между преобразователями 141 и 143 (данное положение представлено на Фиг. 5е); объект М3, расположенный на правой стороне тела человека, также может быть обнаружен (сигнал S3, S32) при пересечении данным объектом поперечных линий 141D и 144D обнаружения, как показано на Фиг. 5b и 5g, и
металлический объект М4, несомый человеком на задней стороне тела, может быть обнаружен благодаря наличию барьеров 131 и 133 обнаружения прохождения (в комбинации с сигналами S4, S42), сигналы которых позволяют центральному блоку 50 определять то, что человек покидает линии 141D и 144D обнаружения, образованные соответственно между парой преобразователей 141 и 142 и парой преобразователей 143 и 144 (данные положения также соответствуют пересечению барьеров 131 и 133 прохода, проиллюстрированному на Фиг. 5с и 5h), а также (сигнал S40, S41) при достижении человеком пересечения линий 142D и 143D обнаружения и центрального барьера 132 прохода (Фиг. 5е).
Напомним, что, как и на Фиг. 2, высотное местоположение объектов М1, М2, М3 и М4 на теле человека определяют известным способом в зависимости от методики металлообнаружения в известных арочных детекторах, в частности - за счет разбиения катушек по высоте для создания обособленных зон обнаружения по высоте.
Фиг. 6е, 6f, 6g и 6h схематически изображают сигналы, поступающие от приемных преобразователей 142, 143, когда преобразователи 141 и 144 представляют собой последовательно передающие преобразователи, в гипотетическом случае, когда металлический объект целиком опоясывает участок тела досматриваемого человека, например, опоясывает талию человека. Как видно из Фиг. 6е - 6h, в данном случае преобразователи 142 и 143 запускают сигнал обнаружения металлического объекта, когда человек начинает пересекать соответствующую линию обнаружения и завершают данный сигнал обнаружения после того, как человек пройдет соответствующую линию обнаружения.
Если искомый металлический объект сформирован не в виде сплошного пояса, опоясывающего человека, а в виде ряда отдельных объектов, рассредоточенных по периметру тела человека, то сигнал, поступающий от приемных преобразователей 142 и 143 будет образован серией импульсов, распределенных во времени от начала до конца пересечения барьера обнаружения и поперечных 141D, 144D и косых 142D, 143D линий обнаружения, как и на Фиг. 6а, 6b, 6с и 6d.
Из приведенного выше описания будет понятно, что предлагаемое устройство, объединяющее в себя металлодетектор 100, содержащий по меньшей мере три преобразователя 140, 141, 142 и 143 или 144 обнаружения, и барьеры 130, 131, 132 и 133 обнаружения прохождения, обеспечивает, путем поиска совпадения между сигналами, поступающими от металлодетектора 100, образованного преобразователями 140, и сигналами, поступающими от барьеров 130 обнаружения прохождения, или интерпретации сигналов, поступающих от преобразователей 140, на основе сигналов, поступающих от барьеров 130 обнаружения прохождения, что позволяет определять положение человека в проходе 102, возможность распознания положения обнаруженного металлического объекта, как в направлении по ширине прохода, поперечном направлению движения, обычно на левой или на правой стороне тела человека, так и в направлении в глубину, продольном и параллельном направлению движения, обычно на передней или на задней стороне тела человека.
Как указано во вступительной части, изобретение также относится к способу обнаружения несанкционированных объектов, несомых человеком, посредством вышеуказанного устройства, содержащего усовершенствованный металлодетектор 100. В частности, данный способ включает в себя этапы, на которых осуществляют обнаружение металлических объектов, несомых человеком, с определением местоположения в трехмерном пространстве на теле человека обнаруженных металлических объектов, посредством металлодетектора 100.
Фиг. 8 схематически изображает неограничивающий пример реализации предлагаемого способа обнаружения.
Фиг. 8 изображает схему последовательности, содержащей следующие этапы:
Начальный этап 200, на котором применяют сигналы, поступающие от барьеров 130 обнаружения прохождения, и определяют положение человека относительно металлодетекторных преобразователей 140;
Этап 202, на котором применяют сигналы, поступающие от металлодетекторных преобразователей 140;
Этап 204, на котором осуществляют поиск пересечения поперечной линии 141D, 144D обнаружения;
Если оно будет найдено - этап 206, на котором выясняют, соответствует ли данное пересечение появлению на поперечной линии обнаружения одновременно с обнаружением металла;
Если да, то этап 208, на котором подтверждают обнаружение металлического объекта М1 на передней стороне тела человека;
В случае отрицательного результата на этапе 206 - этап 210, на котором осуществляют поиск человека с центром на поперечной линии обнаружения одновременно с обнаружением металла;
Если он будет найден - этап 212, на котором подтверждают обнаружение металлического объекта М2 и/или М3 на левой или правой стороне тела человека;
В случае отрицательного результата на этапе 210 - этап 214, на котором выясняют, соответствует ли данное пересечение началу или окончанию пересечения поперечной линии обнаружения одновременно с обнаружением металла;
Если да - то этап 216, на котором подтверждают обнаружение металлического объекта М4 на задней стороне тела человека;
В случае отрицательного результата на этапе 204 или 214 - этап 218, на котором осуществляют поиск пересечения косой линии 142D, 143D обнаружения;
Если оно будет найдено - этап 220, на котором выясняют, соответствует ли данное пересечение пересечению косой линии обнаружения левой стороной тела человека одновременно с обнаружением металла;
Если да - то этап 222, на котором подтверждают обнаружение металлического объекта М2 на левой стороне тела человека;
В случае отрицательного результата на этапе 220 - этап 224, на котором осуществляют поиск человека, пришедшего к пересечению двух косых линий обнаружения одновременно с обнаружением металла;
Если он будет найден - этап 226, на котором подтверждают обнаружение металлического объекта М1 на передней стороне тела человека;
В случае отрицательного результата на этапе 224 - этап 228, на котором выясняют, соответствует ли данное пересечение пересечению косой линии обнаружения правой стороной тела человека одновременно с обнаружением металла;
Если да - то этап 230, на котором подтверждают обнаружение металлического объекта М3 на правой стороне тела человека;
В случае отрицательного результата на этапе 228 - этап 232, на котором осуществляют поиск человека, покидающего пересечение двух косых линий обнаружения одновременно с обнаружением металла;
Если он будет найден - этап 234, на котором подтверждают обнаружение металлического объекта М4 на задней стороне тела человека, и
Закольцовывание на этап 204 в случае отрицательного результата по окончании этапов 218 и 232.
В зависимости от выбранной конфигурации преобразователей, могут быть выполнены не все этапы, проиллюстрированные на Фиг. 8.
Кроме того, порядок и хронология этапов, проиллюстрированных на Фиг. 8, могут быть изменены.
Предлагаемый способ может дополнительно включать в себя этапы, на которых удаляют наложенные обозначения Sx металлических объектов, идентифицированные на этапе Тх, при этом обозначение Sn по меньшей мере одного металлического объекта было четко идентифицировано ранее, если путем анализа будет определено, что наложенное обозначение Sx включает в себя обозначение Sn, для облегчения индивидуальной идентификации обозначений каждого металлического объекта.
Как сказано выше, изобретение также относится к частному варианту применения раскрытого выше металлодетектора 100, в котором металлодетектор, образующий средства обнаружения на основе индуцированного поля, встроен в сканер 10 тела, образующий средства обнаружения на основе визуализации микроволнового поля.
Прилагаемая Фиг. 9 представляет предлагаемое устройство, содержащее сканер 10 тела с встроенным в него металлодетектором 100.
Сканер 10 тела может быть выполнен в соответствии с любым известным вариантом осуществления. Поэтому он не будет описан ниже.
Суть работы сканера 10 тела состоит в измерении микроволновой энергии, отражаемой и/или поглощаемой в зависимости от свойств проверяемых материалов, в частности - от диэлектрических свойств и магнитной проницаемости.
В качестве неограничивающего примера, сканер 10 тела может соответствовать положениям документа ЕР 2202700.
Металлодетектор 100 предпочтительно размещен у входа в сканер 10 тела. Он образует канал или проход 102, по которому человек должен пройти, чтобы попасть в сканер 10 тела.
Формы встраивания металлодетектора 100 в сканер 10 тела могут быть предметом различных альтернативных вариантов осуществления.
Фиг. 10а представляет металлодетектор 100 того типа, что представлен на Фиг. 1а, с тремя стоечными преобразователи 141, 142 и 143, расположенными по ходу движения перед сканером 10 тела, содержащим передатчик 12 и приемник 14, расположенные в противоположных друг другу панелях, обрамляющих смотровую камеру сканера 10 тела.
Фиг. 10b представляет металлодетектор 100 того типа, что представлен на Фиг. 1b, с четырьмя стоечными преобразователями 141, 142, 143 и 144, расположенными по ходу движения перед сканером 10 тела, содержащим передатчик 12 и приемник 14, расположенные в противоположных друг другу панелях, обрамляющих смотровую камеру сканера 10 тела.
Фиг. 10с представляет металлодетектор 100 того типа, что представлен на Фиг. 1bc, стремя или четырьмя панельными преобразователями 141, 142, 143 и 144, расположенными по ходу движения перед сканером 10 тела, содержащим передатчик 12 и приемник 14, расположенные в противоположных друг другу панелях, обрамляющих смотровую камеру сканера 10 тела.
Фиг. 10d изображает альтернативный вариант осуществления изобретения, в котором металлодетектор 100 расположен не перед сканером 10 тела по ходу движения, а совмещен со сканером 10 тела, то есть встроен в панели сканера 10 тела, вмещающие передатчик 12 и приемник 14 и обрамляющие смотровую камеру сканера 10 тела. Металлодетектор 100, встроенный таким образом в панели сканера 10 тела, может соответствовать любому из альтернативных вариантов осуществления на Фиг. 1а - 1с, то есть может содержать три или четыре стоечных или панельных преобразователя.
Фиг. 10е изображает альтернативный вариант осуществления изобретения, в котором предложены первый металлодетектор 100, расположенный по ходу движения перед сканером 10 тела, и второй металлодетектор 100bis, совмещенный со сканером 10 тела, то есть встроенный в панели сканера 10 тела, вмещающие передатчик 12 и приемник 14 и обрамляющие смотровую камеру сканера 10 тела. Металлодетектор 100, расположенный по ходу движения перед сканером 10 тела, может соответствовать любому из альтернативных вариантов осуществления на Фиг. 1а - 1с, то есть может содержать три или четыре стоечных или панельных преобразователя. В качестве альтернативы, он может содержать только два преобразователя 140, расположенные соответственно по обе стороны канала 102, для обнаружения присутствия металлического объекта. Металлодетектор 100bis, встроенный в панели сканера 10 тела, может соответствовать любому из альтернативных вариантов осуществления на Фиг. 1а - 1с, то есть может содержать три или четыре стоечных или панельных преобразо вателя.
Один вариант осуществления, представленный на Фиг. 10е, содержащий средства 140 металлообнаружения с возможностью обнаружения в трех измерениях, совмещенные со сканером 10 тела, а также дополнительные средства 100 металлообнаружения, выполненные с возможностью обнаружения в одном измерении и расположенные по ходу движения перед сканером 10 тела, обеспечивает преимущество, состоящее в том, что данная конфигурация обеспечивает возможность применения переднего по ходу движения индукционного одномерного металлодетектора, оптимизированного для распознания присутствия или отсутствия металлических объектов, и регулирования, в зависимости от их присутствия или отсутствия, чувствительности сканера 10 тела для сведения к минимуму числа ложных тревог, и трехмерного металлодетектора, совмещенного с индукционным сканером 10 тела и оптимизированного для определения местоположения металлических объектов, для обеспечения максимальной точности определения местоположения металлических объектов.
Как сказано выше, объем изобретения включает в себя отображение результата анализа на основе индукции с целью поиска металлического объекта и результата анализа микроволновых изображений на одном и том же экране с возможностью просмотра оператором.
В одном частном варианте осуществления настоящего изобретения, в случае обнаружения на основе индуцированного поля одного или нескольких искомых объектов, заранее задают чувствительность системы 10 микроволновой визуализации на уровне «металл и диэлектрик» только в зоне (зонах), где индукционная система 100 обнаружила присутствие искомого металлического объекта(-ов), а в других зонах заранее задают чувствительность системы 10 микроволновой визуализации на уровне «диэлектрик». В случае применения одномерной индукционной системы, вышеуказанные зоны задают только по высоте, а в случае применения трехмерной индукционной системы, зоны задают по высоте, ширине и глубине.
Как указано во вступительной части, изобретение также относится к способу обнаружения несанкционированных объектов, несомых человеком, с применением вышеуказанного устройства, содержащего сканер 10 тела в комбинации с металлодетектором 100, встроенным в сканер 10 тела. В частности, способ включает в себя этапы, на которых осуществляют обнаружение металлических объектов, несомых человеком, с определением местоположения в трехмерном пространстве на теле человека обнаруженных металлических объектов, посредством металлодетектора 100 и управляют сканером 10 тела путем регулирования чувствительности сканера 10 тела, по меньшей мере, в исследуемой зоне, когда металлодетектор обнаруживает присутствие металлического объекта.
Таким образом, изобретение обеспечивает возможность сосредоточить повышенное внимание для анализа посредством сканера 10 тела на зоне, содержащей металлические объекты М1, М2, М3 и/или М4, обнаруженные металлодетектором 100, путем сосредоточения выполняемого сканером 10 тела анализа на данной исследуемой зоне.
В частности, объем изобретения включает в себя задание высокого уровня чувствительности сканера 10 тела, образующего средства анализа микроволновых изображений, когда средства обнаружения индукционного типа обнаруживают возможное присутствие искомого металлического объекта, по меньшей мере, в исследуемой зоне, выявленной металлодетектором, и напротив, задание более низкого уровня, когда средства обнаружения индукционного типа не обнаруживают возможное присутствие искомого металлического объекта.
Таким образом, согласно объему изобретения, если средства анализа индукционного типа, образованные металлодетектором 100, не обнаруживают вероятное присутствие металлических объектов, чувствительность средств анализа микроволновых изображений, образованных сканером 10 тела, можно оставить относительно низкой на уровне, достаточном для обнаружения неметаллических объектов.
Изобретение позволяет ограничить обычно высокий показатель ложных тревог в результате применения средств анализа микроволновых изображений (обычно порядка 65% - 85%) только случаями предварительного обнаружения металлического объекта связанным металлодетектором индукционного типа (для которых данный показатель составляет порядка 10%), при этом общий показатель ложных тревог в результате применения предлагаемого сканера тела является относительно низким. Для остальных 90% людей, на ком средства металлообнаружения не обнаруживают металлический объект, устанавливают низкий уровень чувствительности сканера тела. Таким образом, общий показатель ложных тревог в результате применения предлагаемого сканера тела обычно находится в диапазоне от 10 до 20%.
Специалистам в данной области техники будет понятно, что регулирование чувствительности средств анализа микроволновых изображений путем повышения чувствительности указанных средств анализа микроволновых изображений, образующих сканер тела, только в случаях предварительного обнаружения металлического объекта средствами металлообнаружения позволяет значительно снизить общий показатель ложных тревог предлагаемой системы.
Учитывая то, что, по статистике, срабатывание тревожной сигнализации происходит менее чем в 10% случаев при досмотре людей с помощью индукционных металлодетекторов, по меньшей мере 90% досматриваемых людей будут проходить досмотр с помощью микроволнового сканера тела только на наличие диэлектрических (неметаллических) искомых объектов с применением микроволнового поля пониженной чувствительности, что значительно снизит общий показатель ложных тревог.
Фиг. 11 изображает схему последовательности основных этапов предлагаемого способа обнаружения с применением металлодетектора 100, встроенного в сканер 10 тела, включающего в себя следующие друг за другом этапы, на которых:
- этап 300: начинают досмотр человека. На данном этапе подлежащего досмотру человека приглашают войти в предлагаемый сканер тела с прохождением через металлодетектор 100;
- этап 310: человек начинает проходить через индуцированное поле, генерируемое металлодетектором 100, а именно - катушками 140. На данном этапе досматриваемый человек проходит/останавливается, пересекает контрольную зону с индуцированным полем (напомним, что, как сказано выше, контрольная зона с индуцированным полем может быть расположена по ходу движения перед сканером 10 тела как таковым, как проиллюстрировано на Фиг. 9 и Фиг. 10а - 10с, или охватывать зону сканера 10 тела, как проиллюстрировано на Фиг. 10d и 10е);
- этап 311: получают сигнал, соответствующий индуцированному полю;
- этап 320: анализируют сигналы, поступающие от металлодетектора 100, для определения того, был ли обнаружен искомый металлический объект или нет;
- этап 330 реализуют в случае отрицательного результата определения того, был ли обнаружен искомый объект, на этапе 320: центральный блок системы устанавливает чувствительность устройства 10 микроволновой визуализации на низкий уровень чувствительности «диэлектрик». Чувствительность устройства 10 микроволновой визуализации изменяют путем изменения параметров обработки микроволнового изображения посредством центрального блока для определения, на основе сигналов, генерируемых металлодетектором 100, того, должны ли средства 50 анализа направить инструкции генерирования тревожного сигнала (звукового и/или оптического) соответствующему устройству оповещения. В данном случае, поскольку металлодетектор 100 не обнаружил искомый металлический объект, центральный блок изменяет параметры обработки микроволнового изображения таким образом, чтобы анализ в сканере 10 тела происходил с чувствительностью визуализации в поле микроволнового контроля, соответствующей уровню не выше необходимого для обнаружения искомых диэлектрических объектов, то есть с чувствительностью ниже необходимой для обнаружения искомых металлических объектов. Установка на этот уровень позволяет снизить риск ложных тревог.
- этап 340 реализуют в случае положительного результата на этапе 320: в данном случае центральный блок устанавливает чувствительность устройства 10 микроволновой визуализации на более высокий уровень чувствительности «металл и диэлектрик». В данном случае чувствительность устройства 10 микроволновой визуализации также изменяют путем изменения параметров обработки микроволнового изображения посредством центрального блока 50. В частности, данное изменение чувствительности обеспечивает возможность обнаружения и искомых металлических объектов, и искомых диэлектрических объектов. Несмотря на то, что установка на этот уровень повышает строгость и может в определенной степени привести к возникновению ложных тревог, она необходима в связи с тем, что металлодетектор 100 обнаружил ранее по ходу движения вероятное присутствие металла (это происходит только в 10% случаев и, несмотря на то, что по своему характеру может создать риск высокого показателя ложных тревог, не приводит к возникновению существенного общего показателя рисков ложных тревог).
- этап 342: получают сигнал от средств 10 обнаружения в микроволновом поле. На данном этапе досматриваемого человека сканируют с помощью средства 10 контроля в микроволновом поле. Соответствующие данные, поступающие от средств обнаружения, собирают и анализируют.
- этап 360: на данном этапе центральный блок анализирует сигналы, поступающие от микроволновых средств 10 обнаружения, и определяет, соответствуют ли они местоположению искомого объекта. Для этого средства 50 анализа выполняют обработку микроволнового изображения с учетом чувствительности микроволновой визуализации, заданной на этапе 330 или на этапе 340 в зависимости от результата на этапе 320.
Следует понимать, что в одном альтернативном варианте осуществления этап 340, на котором изменяют чувствительность, можно, в качестве альтернативы, выполнять одновременно с этапом 342, на котором осуществляют получение, или вслед за ним, при этом изменение чувствительности соответствует изменению параметров обработки микроволнового изображения.
- этап 380, реализуемый в случае положительного результата на этапе 360: выдают сигнал тревоги и отображают положение искомых объектов на микроволновом изображении, сгенерированном центральным блоком 50. Сигнал тревоги отображают с возможностью его просмотра оператором, обычно на экране, с отображением положения обнаруженных искомых объектов. Следует отметить, что этап 380 пропускают, если этапе 360 искомый объект не обнаружен.
- этап 390: окончание досмотра человека.
В одном варианте осуществления центральный блок 50 может быть выполнен с возможностью изменения, на этапе 340, чувствительности микроволновой визуализации только в зоне микроволнового изображения, в которой металлодетектор 100 обнаружил искомый металлический объект, при этом чувствительность в других зонах микроволнового изображения оставляют без изменений. Иначе говоря, центральный блок 50 изменяет указанную чувствительность только в части микроволнового изображения, полученной на основе сигналов, поступивших от микроволновых средств 10 обнаружения, при этом указанная часть соответствует зоне, в которой металлодетектор обнаружил искомый металлический объект.
На Фиг. 10 можно заметить наличие отметок на площадке 20, 22 по существу в центре пространства, образующего сканер 10 тела. Эти отметки 20, 22 предпочтительно соответствуют контуру рисунков обувных подошв. Отметки 20, 22 предназначены для размещения в их пределах стоп человека во время его досмотра сканером 10 тела. Отметки 20, 22 позволяют гарантировать точное расположение досматриваемого человека относительно микроволновых средств 12 передачи/приема и микроволновых средств 14 передачи/приема, размещенных друг напротив друга соответственно по обе стороны образованного таким образом прохода в сканере 10 тела, являющегося продолжением расположенного перед ним по ходу движения прохода 102, образованного металлодетектором 100.
Несмотря на то, что это не показано на прилагаемых фигурах, металлодетектор 100 также может быть установлен на площадке с центральной линией или аналогичным средством, устанавливающим границы предпочтительного пути человека во время его движения в металлодетекторе 100, чтобы гарантировать точное расположение человека относительно боковых паналей 110, 120 и, следовательно, относительно средств 140 обнаружения.
Сканер 10 тела может представлять собой проходной сканер. В данном случае, пройдя досмотр в сканере 10 тела, досматриваемый человек выходит из сканера 10 тела через его конец, противоположный входу, через который он вошел в металлодетектор 100.
Сканер 10 тела также может быть закрытым на конце, противоположном входу в металлодетектор 100. В данном случае, пройдя досмотр в сканере 10 тела, досматриваемый человек выходит из сканера 10 тела, вновь проходя через металлодетектор 100.
Разумеется, настоящее изобретение не ограничено раскрытыми выше вариантами осуществления и включает в себя любой альтернативный вариант осуществления без отступления от его существа.
Как сказано выше, барьеры 130 обнаружения прохождения могут быть сформированы на основе не только оптической, но и любой другой технологии.
Обнаружение продвижения человека и его расположения в проходе 102 можно осуществлять, например, с помощью по меньшей мере одной надлежаще расположенной съемочной камеры, обеспечивающей возможность обнаружения, например, путем поэлементного анализа, последовательного прохождения человеком множества мнимых барьеров, соответствующих местоположению раскрытых выше барьеров.
Аналогичным образом, металлодетектор 100, размещенный по ходу движения перед сканером 10 тела согласно настоящему изобретению, может быть оснащен допплеровской системой или чем-либо подобным с возможностью определения места и перемещения человека в проходе 102.
Предлагаемая система содержит центральный блок, анализирующий как сигналы, поступающие от барьеров 130 обнаружения прохождения, так и сигналы, поступающие от преобразователей 140.
Центральный блок применяет сигналы, поступающие от барьеров 130 обнаружения прохождения, для определения положения человека в металлодетекторе 100 и относительно преобразователей 140. Зная положение человека относительно преобразователей 140, центральный блок может определять, при обнаружении преобразователями 140 металлического объекта, часть тела, на которой расположен указанный металлический объект.
Следует отметить, что объем изобретения включает в себя то, что расположение преобразователей 141, 142, 143, 144 и взаимодействие между ними, задаваемое путем их настройки на работу в режиме передачи или в режиме приема, задают основные линии обнаружения между двумя передающими и приемными преобразователями соответственно, некоторые из которых поперечны направлению движения в металлодетекторе 100, а другие проходят по косой или по диагонали относительно данного направления движения в металлодетекторе 100.
Кроме того, после ознакомления с вышеприведенным описанием и с прилагаемыми фигурами будет понятно, что поперечные линии обнаружения, главным образом, обеспечивают возможность обнаружения металлических объектов, несомых человеком на передней и на задней стороне его тела, если передняя сторона первой достигает указанных линий, а задняя сторона тела человека соответственно последней покидает их, а косые линии обнаружения, главным образом, обеспечивают возможность обнаружения металлических объектов, несомых человеком на левой или на правой стороне тела, если указанные стороны тела человека последовательно пересекают эти линии.
В частности, комбинация металлодетектора 100 и сканера 10 тела согласно изобретению позволяет гарантировать надежность обнаружения металлических объектов по всему телу человека, в том числе - на уровне ступней, за счет сосредоточения анализа, выполняемого сканером 10 тела, в зависимости от результатов первого исследования, выполненного металлодетектором 100.
Встраивание металлодетекторных преобразователей 141, 142, 143 и 144 может быть предметом множества вариантов осуществления.
Как сказано выше, детекторы, расположенные на одной и той же стороне прохода 102, то есть детекторы 141 и 144 с одной стороны и 142 и 143 с другой стороны, предпочтительно расположены в соответствующих боковых панелях 110, 120. Они могут быть расположены на одной и той же боковой опоре или на соответствующих опорах.
В качестве альтернативы, детекторы 141, 144 и 142, 143 могут быть расположены в соответствующих стойках.
На практике, один и тот же экран может отображать оператору результат индукционного анализа с целью поиска металлического объекта и изображения, являющиеся результатом микроволнового анализа.

Использование: для обнаружения несомых людьми запрещенных объектов. Сущность изобретения заключается в том, что система обнаружения несомых людьми запрещенных объектов содержит металлодетектор, содержащий по меньшей мере три преобразователя, размещенных по обеим сторонам прохода, при этом два из указанных преобразователей расположены на одной и той же стороне прохода и разнесены продольно в направлении движения по проходу, а третий преобразователь расположен на противоположной стороне прохода с возможностью осуществления тремя преобразователями в комбинации распознания в пространстве местоположения обнаруженных металлических объектов. Технический результат: обеспечение возможности определения места расположения металлического объекта, обнаруженного на теле человека, а также обеспечение возможности повышения точности и скорости досмотра. 2 н. и 17 з.п. ф-лы, 12 ил.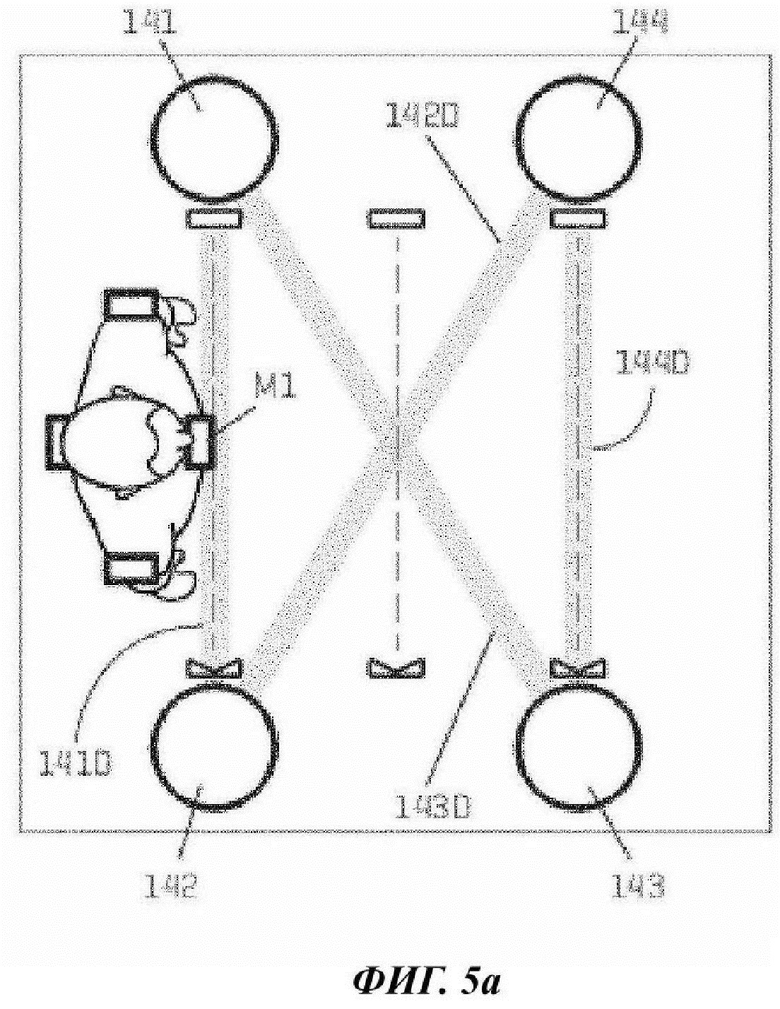
1. Система обнаружения несомых людьми запрещенных объектов, содержащая металлодетектор (100), содержащий:
- две панели (110, 120), образующие проход,
- по меньшей мере три преобразователя (141, 142, 143), размещенных в панелях (110, 120) и расположенных по обе стороны прохода (102), при этом два из указанных преобразователей (142, 143) размещены в первой из указанных панелей (110) и продольно разнесены по направлению движения в проходе (102), а третий преобразователь (141) расположен на противоположной стороне прохода (102) во второй из указанных панелей (120) так, что по меньшей мере три преобразователя (141, 142, 143) в комбинации обеспечивают возможность распознания в пространстве местоположения по меньшей мере одного обнаруженного металлического объекта (М1, М2, М3, М4),
- по меньшей мере два барьера (130) обнаружения прохождения, выполненных с возможностью генерирования сигнала обнаружения при прохождении человека через металлодетектор (100), и
- центральный блок (50), выполненный с возможностью анализа и применения сигналов от по меньшей мере одного барьера (130) обнаружения прохождения в металлодетекторе (100) и сигналов от указанных по меньшей мере трех преобразователей (140), определения положения человека в металлодетекторе (100) относительно преобразователей (140) в момент времени, когда по меньшей мере один преобразователь (141, 142, 143, 144) генерирует сигнал для обнаружения металлического объекта, и определения на их основе положения обнаруженного металлического объекта (М1, М2, М3, М4) относительно тела человека.
2. Система по п. 1, в которой указанные по меньшей мере три преобразователя (141, 142, 143) расположены в любой из следующих конфигураций: передатчик и два приемника, например, размещенные по схеме, при которой передатчик (141) размещен в первой панели (110), а два соответствующих приемника (142, 143) размещены во второй панели (120); два передатчика и приемник, например, размещенные по схеме, при которой два передатчика (142, 143) размещены в первой панели (110), а приемник (141) размещен во второй панели (120); два передатчика и два приемника, например, размещенные по схеме, при которой два преобразователя (141, 144) размещены в первой панели (110) и два преобразователя (142, 143) размещены во второй панели (120); при этом каждый из преобразователей (141, 142, 143, 144) выполнен с возможностью работы попеременно в качестве передатчика и/или приемника; при этом каждый из металлодетекторных преобразователей (141, 142, 143, 144) выполнен с возможностью работы попеременно в качестве передатчика и/или приемника.
3. Система по любому из пп. 1 или 2, в которой центральный блок (50) выполнен с возможностью распознания положения обнаруженного металлического объекта (М1, М2, М3) как в направлении по ширине прохода (102), поперечном направлению движения, обычно на левой или на правой стороне тела человека, так и в направлении в глубину, параллельном направлению движения, обычно на передней или на задней стороне тела человека.
4. Система по любому из пп. 1-3, в которой каждый преобразователь (141, 142, 143, 144) сформирован из по меньшей мере одной катушки.
5. Система по любому из пп. 1-4, в которой барьеры (130) обнаружения прохождения включают в себя оптические барьеры.
6. Система по любому из пп. 1-5, в которой металлодетектор (100) содержит три барьера (131, 132, 133) обнаружения прохождения, рассредоточенных продольно вдоль прохода (102) в металлодетекторе (100) и связанных с преобразователями (141, 142, 143, 144) с возможностью определения положения человека в проходе (102) относительно преобразователей (141, 142, 143, 144).
7. Система по любому из пп. 1-6, в которой барьеры (131, 132, 133) обнаружения прохождения содержат детекторы, размещенные в боковых панелях (110, 120), обрамляющих проход (102).
8. Система по любому из пп. 1-7, в которой по меньшей мере один барьер (130) обнаружения прохождения продольно совпадает с парой преобразователей (140).
9. Система по любому из пп. 1-8, в которой по меньшей мере один барьер (130) обнаружения прохождения продольно совпадает с центром косой линии обнаружения, соединяющей два соответствующих преобразователя (141, 143).
10. Система по любому из пп. 1-9, в которой преобразователи (141, 142, 143, 144) взаимодействуют в группах по трое.
11. Система по п. 10, в которой в каждой группе из трех преобразователей один преобразователь работает в качестве передатчика или приемника, а остальные два преобразователя выполняют ответную функцию приема или передачи.
12. Система по любому из пп. 1-11, в которой пара преобразователей (141, 142) размещены друг напротив друга по обе стороны прохода (102) в соответствующих боковых панелях (110, 120) на одном и том же продольном уровне в направлении прохождения в проходе (102), при этом третий преобразователь (143) расположен со смещением дальше по направлению прохождения в проходе (102) относительно вышеуказанной пары преобразователей (141, 142), при этом по меньшей мере один барьер (132) обнаружения прохождения расположен на том же продольном уровне, что и пара преобразователей (141, 142).
13. Система по любому из пп. 1-12, содержащая четыре преобразователя (141, 142, 143, 144), связанных со следующими друг за другом барьерами (131, 132, 133) обнаружения прохождения вдоль пути перемещения в металлодетекторе (100), при этом один барьер (132) обнаружения прохождения расположен у пары преобразователей (141, 142), а другой барьер обнаружения прохождения расположен в точке пересечения двух косых линий обнаружения, соединяющих соответствующие пары металлодетекторных преобразователей (140).
14. Система по любому из пп. 1-13, в которой указанные по меньшей мере три преобразователя расположены так, что они задают две предпочтительные линии обнаружения между каждой парой преобразователей, размещенных на противоположных сторонах прохода, при этом угол между линиями составляет от 15° до 60°, предпочтительно от 30° до 45°.
15. Система по любому из пп. 1-14, дополнительно содержащая сканер (10) тела, содержащий средства (10) обнаружения на основе микроволновой визуализации, выполненные с возможностью генерирования микроволнового изображения, при этом металлодетектор (100) расположен перед сканером (10) тела по направлению движения.
16. Система по п. 15, в которой центральный блок (50) выполнен с возможностью регулирования чувствительности средств (10) обнаружения на основе микроволновой визуализации в случае обнаружения вероятного присутствия по меньшей мере одного металлического объекта металлодетектором (100) и определения положения обнаруженного металлического объекта (М1, М2, М3, М4) относительно тела человека таким образом, чтобы указанная чувствительность в одной или нескольких исследуемых зонах, соответствующих положению указанного по меньшей мере одного металлического объекта, была выше, чем в остальных частях микроволнового изображения.
17. Система по п. 16, в которой центральный блок (50) выполнен с возможностью регулирования чувствительности средств (10) обнаружения на основе микроволновой визуализации так, чтобы указанная чувствительность в исследуемой зоне (зонах) была выше, чем в остальных частях микроволнового изображения.
18. Способ обнаружения запрещенных объектов (М1, М2, М3), несомых человеком, включающий в себя этапы, на которых:
- S1: обнаруживают (204, 220, 228) по меньшей мере один металлический объект (М1, М2, М3), несомый человеком, проходящим через систему по любому из пп. 1-17, и генерируют сигнал обнаружения металла;
- S2: обнаруживают прохождение человека через металлодетектор (100) и генерируют сигнал обнаружения прохождения;
- S3: анализируют и применяют сигналы обнаружения прохождения и сигналы обнаружения металла;
- S4: определяют положение человека в металлодетекторе (100) относительно преобразователей (140) металлодетектора в момент времени генерирования сигнала обнаружения металла;
- S5: определяют (208, 212, 216, 222, 226, 230, 234) положение обнаруженного металлического объекта (М1, М2, М3, М4) относительно тела человека.
19. Способ по п. 18, дополнительно включающий в себя этапы, на которых:
- S6: осуществляют обнаружение посредством сканера тела для генерирования микроволнового изображения, и
- S7: после выполнения этапа S5, регулируют чувствительность обнаружения сканера тела так, чтобы указанная чувствительность в одной или нескольких исследуемых зонах, соответствующих положению металлического объекта, была выше, чем в остальных частях микроволнового изображения.
| EP 1750148 A1, 07.02.2007 | |||
| СИСТЕМА ОХЛАЖДЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202700C2 |
| EP 1750147 B1, 09.04.2014 | |||
| ОПРАВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЧАСТЕЙ КРЫЛА ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА | 1988 |
|
SU1750149A1 |
| МНОГОДОРОЖЕЧНЫЙ БЛОК МАГНИТНЫХ ГОЛОВОК | 0 |
|
SU174394A1 |
| СИСТЕМА И СПОСОБ ДОСМОТРА СУБЪЕКТА | 2010 |
|
RU2517779C2 |

