1. ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к области сбора геофизических данных. Более конкретно, изобретение относится к оборудованию для анализа геологических слоев под морским дном. В частности, изобретение относится к отрасли нефтеразведки, используя сейсмический способ, но может примениться в любой области, используя систему для получения геофизических данных в морской среде.
В частности, изобретение относится к методике определения расстояния от узла до поверхности между опорной поверхностью (такой как морская поверхность или дно океана) и, по меньшей мере, одним узлом в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн.
2. ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
В этом документе рассматриваются конкретные проблемы, существующие в области сбора сейсмических данных для отрасли нефтеразведки. Настоящее изобретение, конечно, не ограничено этой определенной областью применения, но представляет интерес для любой методики, которая должна справиться со связанными с ней вопросами или проблемами.
В операции сбора сейсмических данных в полевых условиях традиционно используют сети сейсмических датчиков, таких как акселерометры, геофоны или гидрофоны. В контексте сбора сейсмических данных в морской среде эти датчики распределены вдоль кабелей и формируют линейные акустические антенны, обычно называемые "стримерами" или "сейсмоприемными стримерами". Сеть сейсмоприемных стримеров буксируется судном, предназначенным для сейсморазведки.
Сейсмический способ основан на анализе отраженных сейсмоволн. Таким образом, чтобы собрать геофизические данные в морской среде один или несколько погруженных в воду сейсмических источников, активируются, чтобы распространить серию сейсмоволн. Ударная волна, формируемая сейсмическим источником, проходит через столб воды и облучает ультразвуком различные слои морского дна. Часть сейсмоволн (то есть акустических сигналов) отражается и обнаруживается датчиками (например, гидрофонами), распределенными по длине сейсмических стримеров. Эти акустические сигналы обрабатываются и ретранслируются телеметрическими устройствами от сейсмических стримеров до станции управления, расположенной на судне, где сигналы обрабатываются и сохраняются в памяти.
Связанная с этой операцией проблема заключается в расположении сейсмических стримеров. Действительно, важно точно определить местоположение стримеров, в особенности, для:
- контроля позиции датчиков (гидрофонов), чтобы получить удовлетворительную точность изображения морского дна в зоне исследования; и
- обнаружение перемещений стримеров относительно друг друга (стримеры часто подвергаются различному, внешнему воздействию переменной величины, такой как ветер, волны, течения); и
- контроля перемещения стримеров.
Управление позиций стримеров основано на применении управляющих навигационных устройств (обычно называемыми "сейсмоприемниками"), установленных равномерно (например, через каждые 300 метров) вдоль сейсмических стримеров.
Сейсмоприемники известного уровня техники используются только для контроля глубины погружения стримеров. Сегодня сейсмоприемники используются для управления глубиной погружения и боковым положением стримеров.
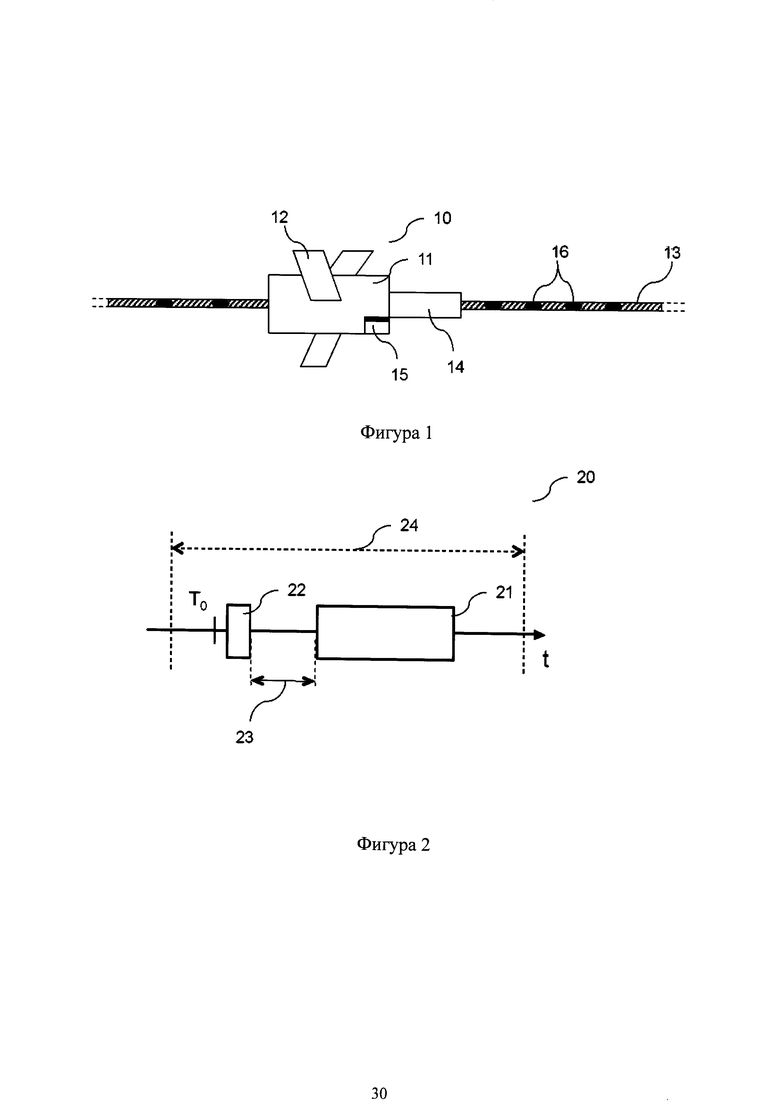
На фигуре 1 показана конфигурация части стримера 13, который содержит ряд датчиков (гидрофонов) 16, электроакустические преобразователи 14 (описанные ниже более подробно) и сейсмоприемники 10 распределенные по его длине.
Стример 13 содержит (по длине) множество частей, представленных на фигуре 1, включая большое число датчиков (гидрофонов) 16 и ряд электроакустических преобразователей 14.
Каждый сейсмоприемник 10 может быть связан с электроакустическим преобразователем 14 и содержит корпус 11, оборудованный, по меньшей мере, одним моторизованным поворотным крылом 12, позволяющим управлять боковым перемещением стримера 13 и управлять глубиной погружения стримера 13.
Управление сейсмоприемниками выполняется локально или системой управления, расположенной на борту судна.
Акустический узел обычно известен как преобразователь 14 с соответствующей электроникой. Сейсмоприемник 10 может быть связан с акустическим узлом, чтобы позволить этому акустическому узлу непосредственно управлять связанным с ним стримером 13.
Для управления движением в боковом направлении электроакустические преобразователи 14 позволяют оценивать расстояния между акустическими узлами (называемые здесь ниже "межузловыми расстояниями"), размещенными вдоль двух различных стримеров 13, вблизи или на расстоянии друг от друга. Более конкретно, электроакустический преобразователь 14 первого стримера посылает несколько первых акустических последовательностей и также получает несколько вторых акустических последовательностей, прибывающих от второго электроакустического преобразователя 14 второго стримера, находящегося вблизи или на расстоянии от указанного первого стримера. Чтобы оценить межузловое расстояние, данные, полученные преобразователем 14 от акустического узла, затем обрабатываются локально электронным модулем (не показан на фигуре 1), связанным с преобразователем 14, или обрабатываются системой управления, расположенной на судне.
Преобразователи 14 являются приемопередатчиками акустических последовательностей (то есть акустических сигналов в виде модулируемых битов), используемых для определения расстояния между смежными узлами, расположенными на различных стримерах, формируя, таким образом, сетку межузловых расстояний, чтобы знать точное боковое расположение всех стримеров.
Здесь под преобразователем подразумевается либо одиночное электроакустическое устройство, состоящее из приемопередатчика (излучатель/приемник) акустических сигналов, или комбинация из передающего устройства (например, акустического повторителя сигналов) и приемного устройства приемника (например, гидрофона) или акселерометра, геофона…).
Обычно каждый узел содержит электроакустический преобразователь, позволяющий ему поочередно действовать как передающий узел и как приемный узел (для передачи и приема, соответственно, акустических сигналов). В альтернативном варианте воплощения первый набор узлов действует только как передающие узлы, и второй набор узлов действует только как приемные узлы. Третий набор узлов (каждый из которых действует как передающий узел и приемные узлы) также может использоваться в комбинации с первыми и вторыми наборами узлов.
Для управления глубиной погружения каждый сейсмоприемник 10 снабжена одним или несколькими датчиками давления 15 так же как связанным с ними электронным модулем (не показан), которые обеспечивают обратную связь, чтобы измерить отклонения и погрузить стримеры на заданную глубину.
Однако измерение погружения сейсмических стримеров с такими датчиками давления может вызвать проблемы, учитывая их уязвимость в морской среде. Фактически, датчики давления подвергаются различным воздействиям, которые влияют на их точность и даже на их работу следующим образом:
- появление трещин, электрохимической или электролитической коррозии, которая может вызвать ошибочные измерения давления (и, вследствие этого, ошибочную глубину погружения) и/или проникновение морской воды в сейсмоприемники из-за повреждения тонкой чувствительной диафрагмы, которая больше не является водонепроницаемой;
- появление морских отложений на чувствительной диафрагме, что может вызвать уменьшение времени реакции и изменить характеристики погружения сейсмоприемника;
- изменение точности измерения во времени из-за изменения температуры, что требует постоянной корректировки шага градуировки.
Представляется особенно ценным сделать измерение глубины погружения акустических узлов без обязательного обращения к датчикам давления.
Следует напомнить, что вышеупомянутая проблема описана применительно к области сейсмической разведки в морской среде, но это может быть применена и к другим областям.
3. ПРЕДМЕТ ИЗОБРЕТЕНИЯ
Изобретение, по меньшей мере, в одном варианте воплощения, нацелено на преодоление этого недостатка известного уровня техники.
Более конкретно, целью, по меньшей мере, одного варианта воплощения изобретения является обеспечить методику измерения расстояния от узла до поверхности между опорной поверхностью и акустическим узлом (например, как расстояние погружения (или глубина)) в сети акустических узлов, что позволяет преодолеть нежелательные эффекты, связанные с использованием датчиков давления.
По меньшей мере, один вариант воплощения изобретения также нацелен на обеспечение методики, которая не требует использования датчиков давления.
Дополнительная цель, по меньшей мере, одного варианта воплощения изобретения состоит в обеспечении такой методики, которая проста в реализации и обеспечивает низкие производственные затраты.
Цель еще одного определенного варианта воплощения состоит в сокращении эксплуатационных расходов, связанных со средствами, способствующими управлению позиций стримеров.
Еще одной целью, по меньшей мере, одного варианта воплощения изобретения является создание методики контроля качества измерения расстояния от узла до поверхности, связанного с датчиками давления. Таким образом, настоящее изобретение стремится увеличивать надежность измерений расстояния от узла до поверхности и, в частности, улучшить управление глубиной погружения стримеров.
4. КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Конкретный вариант воплощения изобретения предлагает способ получения первого расстояния от узла до поверхности между опорной поверхностью и первым узлом, принадлежащим сети, содержащей множество узлов, расположенных вдоль буксируемых линейных акустических антенн, и в котором множество акустических последовательностей передается между узлами, при этом каждая переданная акустическая последовательность используется для оценки, по меньшей мере, одного межузлового расстояния как функции длительности распространения между узлом отправителя и, по меньшей мере, одним узлом приемника указанной акустической последовательности. Способ содержит:
- излучение указанным первым узлом акустического сигнала в момент подачи сигнала;
- измерение, по меньшей мере, одним вторым узлом:
* первой длительности распространения между указанным моментом излучения и моментом приема отраженной сейсмоволны в результате отражения указанного акустического сигнала от опорной поверхности;
* второй длительности распространения между указанным моментом излучения и моментом приема данного акустического сигнала без отражения указанного акустического сигнала от опорной поверхности;
- получение, по меньшей мере, одной первой величины первого расстояния от узла до поверхности, каждая величина как функция указанных первой и второй длительностей распространения.
Общий принцип этого конкретного варианта воплощения изобретения состоит в передаче первым узлом данного акустического сигнала, отраженная сейсмоволна которого, являющаяся результатом отражения от опорной поверхности, регенерируется вторым узлом, чтобы оценить расстояние от узла до поверхности. Более точно, каждая величина расстояния от узла до поверхности получена на основе двух измерений длительности распространения, выполненных вторым узлом: первой длительности распространения отраженной сейсмоволны сигнала, посланного первым узлом, и второй длительностью распространения сигнала непосредственно посланным первым узлом. Таким образом, этот конкретный вариант воплощения основан на совершенно новом изобретательском подходе, использующем в своих интересах тот факт, что, по меньшей мере, одна величина первого расстояния от узла до поверхности может быть получена, не обращаясь к специализированным устройствам (таким как датчики давления в случае оценки глубины).
Преимущественно, указанные узлы содержат преобразователи, используемые для передачи акустических последовательностей, и указанные стадии измерения первой и второй длительностей распространения выполняются указанными преобразователями.
Таким образом, путем повторного использования электроакустических преобразователей, которые обычно измеряют межузловые расстояния (то есть расстояниям различного характера от расстояния первого от узла до поверхности), в этом конкретном варианте воплощения позволяют снизить затраты на управление линейными акустическими антеннами при погружении. Иными словами, при таком способе использование преобразователей оптимизировано, поскольку они могут использоваться как для определения межузловых расстояний, так и для измерения расстояний от узла до поверхности.
Преимущественно, указанные узлы встраиваются в буксируемые линейные акустические антенны.
По сравнению с другим техническим решением, состоящим в соединении узлов со стримерами как внешними спутниковыми устройствами (например, каждый узел соединен со стримером кабелем), настоящее решение (узлы, встроенные в стримеры) имеет несколько преимуществ: облегчена транспортировка, весь блок (стример и узел) более компактен, дешевле в производстве и монтаже, узлы лучше защищены (спутниковые устройства могут быть подвергнуты столкновению со стримерами).
Преимущественно, способ дополнительно содержит стадию получения величины второго расстояния от узла до поверхности между опорной поверхностью и указанным, по меньшей мере, одним вторым узлом. Первая величина указанного первого расстояния от узла до поверхности является функцией:
* величины указанного второго расстояния от узла до поверхности;
* указанной первой и второй длительности распространения; и
* величиной акустической скорости звука.
Таким образом, помимо первой величины первого расстояния от узла до поверхности, можно получить одну или несколько дальнейших величин первого расстояния от узла до поверхности простым способом (только четыре параметра:
второе расстояние от узла до поверхности, первая и вторая длительность распространения и акустическая скорости звука), обеспечивая, таким образом, средство с повышенной точностью полученных величин расстояния.
Кроме того, в случаях, где не может быть получена никакая первая величина, способ все еще позволяет обеспечивать величину первого расстояния от узла до поверхности, даже если первый узел не может выполнить измерение длительности распространения первой отраженной сейсмоволны.
Например, величина акустической скорости звука обеспечивается системой управления узла или одним или несколькими скоростемерами (например, два скоростемера, расположенные на двух самых дальних стримерах из набора стримеров, буксируемых судном, одним скоростемером, расположенным около судна и другим в противоположном конце судна).
Посредством примеров величина второго расстояния от узла до поверхности может быть получена путем:
- измерения давления, выполняемого датчиком давления, находящимся во втором узле; и/или
- предопределенной установкой величины, например, определяемой пользователем в системе управления узла; и/или
- первой длительности распространения и/или второй длительности распространения, полученной в варианте воплощения способа согласно настоящему изобретению для второго узла.
Преимущественно, способ содержит стадию использования взвешенного среднего числа, по меньшей мере, двух первых величин первого расстояния от узла до поверхности, полученного на указанной стадии получения сигнала, как критерий функций качества отраженной сейсмоволны.
Следовательно, результирующая величина первого расстояния от узла до поверхности будет более точной.
Преимущественно, способ дополнительно содержит стадии:
- получения второй величины первого расстояния от узла до поверхности, в результате измерения давления,
- анализ уровня качества, сравнивая указанную вторую величину первого расстояния от узла до поверхности, по меньшей мере, с указанной одной первой величиной первого расстояния от узла до поверхности. Таким образом, можно выполнить контроль качества, используя измерения расстояния от узла до поверхности, полученные от датчиков давления (первая величина первого расстояния от узла до поверхности, полученная, используя управление качеством второй величины первого расстояния от узла до поверхности с помощью датчиков давления). В альтернативном варианте воплощения также можно выполнить контроль качества, используя измерения расстояния от узла до поверхности, полученные по настоящему изобретению (вторая величина первого расстояния от узла до поверхности получена от датчика давления, используя управление качеством первой величины первого расстояния от узла до поверхности, полученного благодаря изобретению).
Следовательно, это позволяет увеличить надежность измерений расстояния от узла до поверхности, в частности, улучшить управление глубиной погружения линейных акустических антенн.
Преимущественно, способ содержит стадию фильтрования отраженной сейсмоволны, полученной вторым узлом, применяя временное окно, чтобы сохранить только сейсмоволну, отраженную указанной опорной поверхностью.
Таким образом, описываемое техническое решение может быть реализовано, даже если данный акустический сигнал отражен только одной или несколькими поверхностями помимо опорной поверхности. Например, данный акустический сигнал отражается морской поверхностью, как опорной поверхностью, и дном океана, как другая поверхность.
Преимущественно, указанная опорная поверхность принадлежит группе, содержащей морскую поверхность и дно океана.
Преимущественно, указанный данный акустический сигнал является одним из указанных акустических последовательностей или импульсного акустического сигнала, который предшествует или следует за одной из указанных акустических последовательностей в предопределенном периоде времени передачи, который выделен первому узлу. Указанный данный акустический сигнал сопровождается интервалом времени прослушивания.
Таким образом, период времени передачи, обычно используемый для передачи акустической последовательности, используется для передачи акустического сигнала, требуемого для данного варианта воплощения способа.
Преимущественно, указанная стадия получения, по меньшей мере, одна первая величина первого расстояния от узла до поверхности выполняется указанным, по меньшей мере, одним вторым узлом или системой управления узлов сети.
Таким образом, первая и вторая величины первого расстояния от узла до поверхности могут быть оценены либо локально в каждом узле, либо на уровне системы управления, которая отделена от линейных акустических антенн.
Другой вариант воплощения изобретения относится к продукту компьютерной программы, содержащей кодированные команды для того, чтобы реализовать вышеупомянутый способ (в любом из его различных вариантов воплощения), когда указанная программа выполняется на компьютере.
Другой вариант воплощения изобретения относится к средствам машиночитаемой памяти, хранящим компьютерную программу, содержащую ряд команд, выполняемых компьютером, чтобы реализовать вышеупомянутый способ (в любом из его различных вариантов воплощения).
В еще одном варианте воплощения изобретения предлагается устройство для определения расстояния от узла до поверхности между опорной поверхностью и первым узлом, принадлежащим к сети, содержащей множество узлов, расположенных вдоль буксируемых линейных акустических антенн, и в котором множество акустических последовательностей передается между узлами, причем каждая переданная акустическая последовательность используется для оценки, по меньшей мере, одного межузлового расстояния, как функции длительности распространения между передающим узлом и, по меньшей мере, одним приемным узлом указанной акустической последовательности. Указанный второй узел содержит:
- средства для получения:
* первой длительности распространения между моментом излучения данного акустического сигнала и моментом приема отраженной сейсмоволны в результате отражения указанного акустического сигнала от опорной поверхности;
* второй длительности распространения между указанным моментом излучения и моментом приема данного акустического сигнала без отражения указанного акустического сигнала от опорной поверхности;
- средства для получения, по меньшей мере, одной величины расстояния от узла до поверхности, как функции указанных первой и второй длительностей распространения.
5. СПИСОК ФИГУР
Другие признаки и преимущества вариантов воплощения изобретения станут ясными из следующего описания, включающего не ограничивающий изобретение пример его осуществления, и из приложенных чертежей, на которых:
- Уже описанная выше фигура 1 со ссылками на известный уровень техники представляет пример структуры акустического узла, расположенного вдоль стримера;
- Фигура 2 представляет схему синхронизации акустического сигнала, переданного акустическим узлом согласно одному варианту воплощения изобретения;
- Фигура 3 иллюстрирует схему соединений, в которой реализован способ определения расстояния погружения акустического узла согласно одному варианту воплощения изобретения;
- Фигура 4 представляет схему синхронизации акустических сигналов, полученных акустическим узлом по прямому пути передачи, и непрямой путь передачи согласно одному варианту воплощения изобретения;
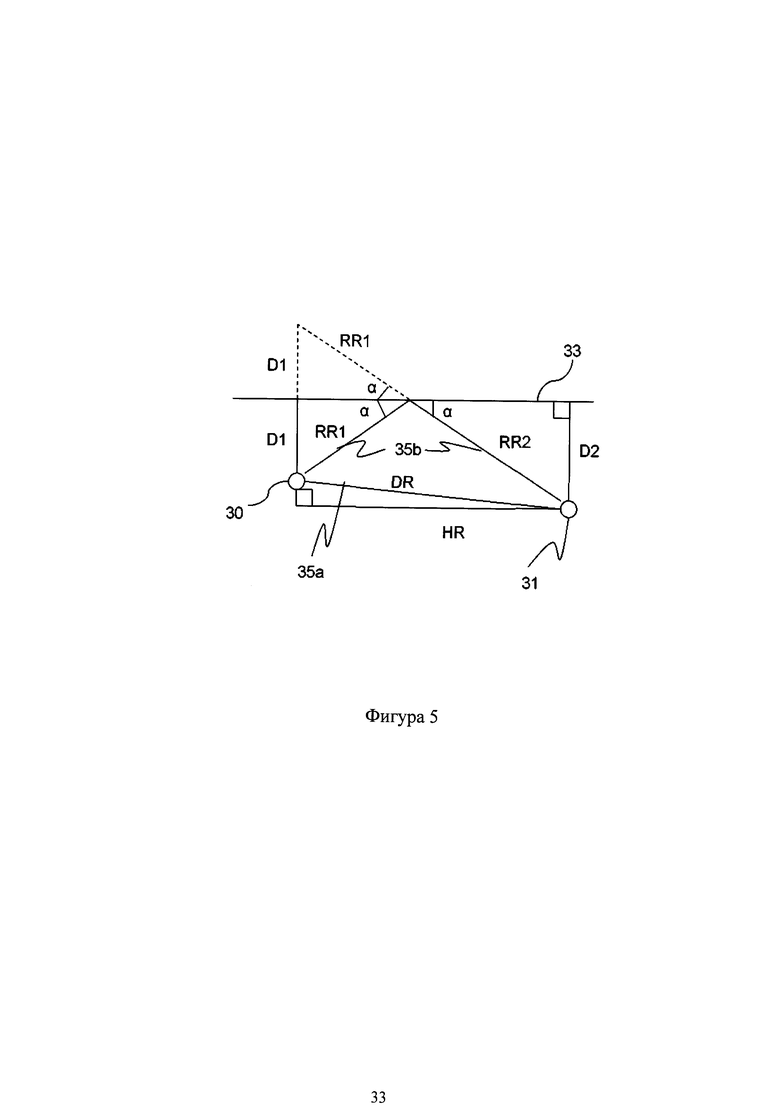
- Фигура 5 - математическое вычисление, иллюстрирующее расчет глубины погружения акустического узла в контексте конкретного варианта воплощения, представленного на фигуре 3;
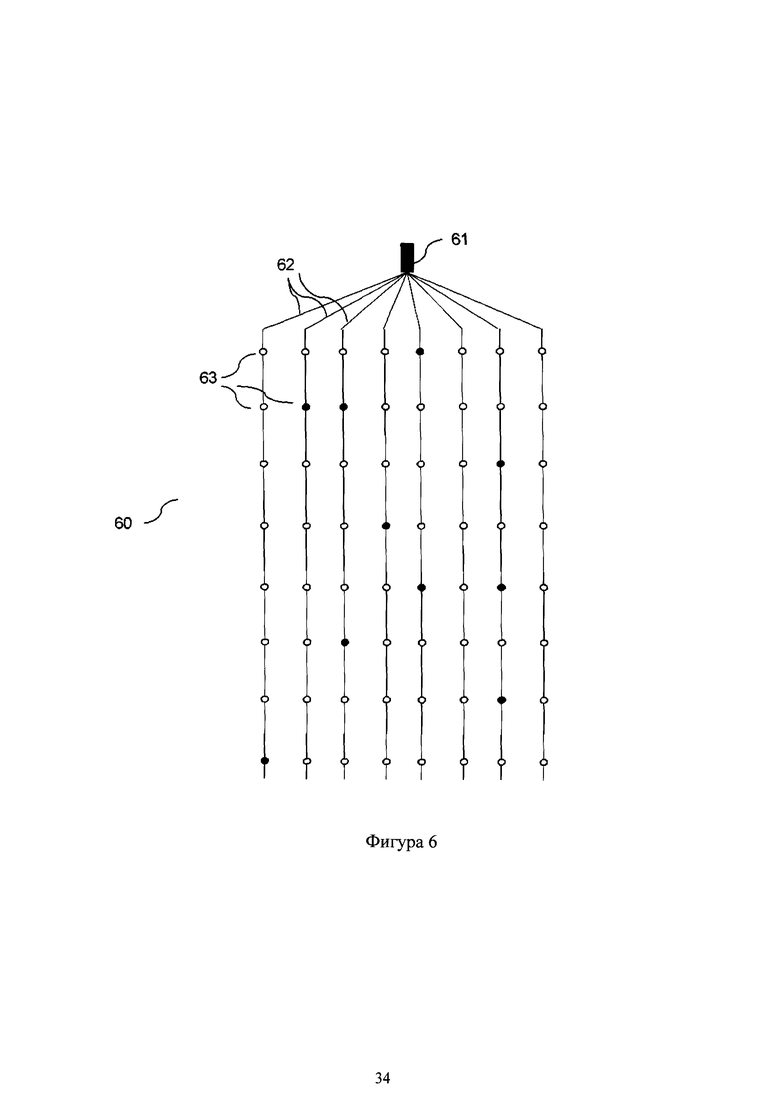
- Фигура 6 иллюстрирует пример сети акустических узлов, в которых можно реализовать способ для получения величины глубины погружения согласно одному варианту воплощения, совместимому с изобретением.
6. ПОДРОБНОЕ ОПИСАНИЕ
На всех фигурах настоящего документа идентичные элементы и стадии обозначены одними и теми же цифровыми позициями.
Фигура 1, уже описанная со ссылками на известный уровень техники, иллюстрирует схематический пример акустического узла (преобразователь 14 и соответствующая электроника), связанного с сейсмоприемником 10, расположенный вдоль стримера 13.
Следует отметить, что в сети акустических узлов, таких как сеть, показанная на фигуре 6 в качестве примера, все узлы не обязательно оборудованы моторизованными поворотными крыльями 12 для привода стримером. Фактически, некоторые акустические узлы сети могут содержать только электроакустический преобразователь 14 со связанным с ним электронным модулем (не показан), чтобы обработать акустические данные, прибывающие от других узлов, помещенных в различные стримеры. Преобразователь здесь составляет часть стримера. Он также может быть отдельным устройством (на чертеже не показан).
Фигура 2 представляет схему синхронизации акустического сигнала 20, переданного акустическим узлом согласно одному варианту воплощения изобретения.
Этот акустический сигнал 20 содержит:
- последовательность модулируемых битов 21 акустического характера, состоящих из данных каждого типа и называемых далее в описании акустической последовательностью;
- импульсный акустический сигнал 22, такой как акустический свисток, звонок или любой сигнал с короткой длительностью, сопровождаемой временем прослушивания 23 (также называемый тектоническим окном времени прослушивания).
В альтернативном варианте воплощения последовательность модулируемых битов 21 и импульсный акустический сигнал 22 - один и тот же сигнал.
Акустическая последовательность 21 обычно используется для оценки межузлового расстояния между передающим узлом и, по меньшей мере, одним приемным узлом, помещенным в смежные стримеры, чтобы распределить сеть стримеров и управлять их положением в случае необходимости. Чтобы оценить межузловое расстояние, узел, получающий акустическую последовательность 21, измеряет длительность распространения между моментами излучения и приема акустической последовательности 21 от начала отсчета во времени акустической последовательности 21 относительно общего опорного времени (набор узлов сети синхронизируется, и известно речевое время каждого узла отправителя). Межузловое расстояние между узлами передачи и приема затем оценивается по следующему уравнению:
UAB=k.tAB,
в котором:
UAB - расстояние, разделяющее передающий узел А от приемного узла В;
tAB - длительность распространения акустической последовательности между моментами излучения (узел А) и приема (узел В);
k - предопределенная величина акустической скорости звука в разведываемой среде.
Акустический сигнал 20 также содержит сигнал, предназначенный для определения глубины погружения узлом от морской поверхности. Этот сигнал состоится из импульсного акустического сигнала 22, сопровождаемого временем прослушивания 23.
В определенном варианте воплощения, описанном ниже более подробно, этот сигнал может также использоваться для определения расстояния от узла до поверхности дна океана.
Следует отметить, что сигнал, содержащий импульсный акустический сигнал 22, сопровождается временем прослушивания 23, может следовать за акустической последовательностью 21, как показано на фигуре 2, или, напротив, может быть передан перед передачей акустической последовательности 21.
Дополнительно отметим, что можно предусмотреть конкретный вариант воплощения, когда передающим узлом акустического сигнала 20 не посылается никакой акустической последовательности 21, но только сигнал 22, используемый для определения расстояния от узла до поверхности (импульсный акустический сигнал 22, сопровождаемый временем прослушивания 23 на фигуре 2).
Время прослушивания 23 служит для включения узла приемника акустического сигнала 20, чтобы прослушать и обнаружить отраженную сейсмоволну, вызванную отражением импульсного сигнала 22 от морской поверхности. Детали о принципе определения глубины погружения между узлом и морской поверхностью объяснены ниже со ссылкой на фигуры 3-6.
Что касается сети акустических узлов, то каждый узел поочередно используется как передающий узел и как приемный узел и имеет только один электроакустический преобразователь для передачи и приема акустических сигналов.
Согласно еще одному варианту воплощения может также быть предусмотрена другая конфигурация с передающим узлом, который выполняет только функцию посылки сигнала (как пингер) и приемный узел, который выполняет только функцию приема сигнала (как гидрофон, используемый в стримере). Однако здесь должно быть известно расстояние между пингером и гидрофоном.
Акустическая сеть основана на временном, частотном и пространственном режиме доступа (то есть временное, частотное и пространственное выделение).
Принцип выделения по времени состоит в разделении доступного времени на несколько отрезков или интервалов «времени выступления», которые выделены различным узлам сети: каждый узел сети имеет цикл «времени выступления», в течение которого он передает свою акустическую последовательность.
Таким образом, согласно изобретению, когда узел передает акустический сигнал 20 в течение своего времени выступления 24, все другие узлы могут его слушать. Кроме того, когда узел не намерен передавать акустическую последовательность 21, его импульсный акустический сигнал 22 и время прослушивания 23 должны быть посланы в течение времени выступления, выделенного передающему узлу.
Принцип частотного выделения состоит в использовании зон кратной гармонической частоты для излучения акустических сигналов, причем каждая полоса частот выделяется определенным узлам сети.
Мы называем «пространственное выделение» тот факт, что два удаленных узла могут излучать одновременно и в той же самой полосе частот, если две акустических последовательности прибывают в различные моменты времени на приемные узлы. Следовательно, не возникает никаких помех между акустическими последовательностями, и каждый приемный узел может обрабатывать сигналы независимо.
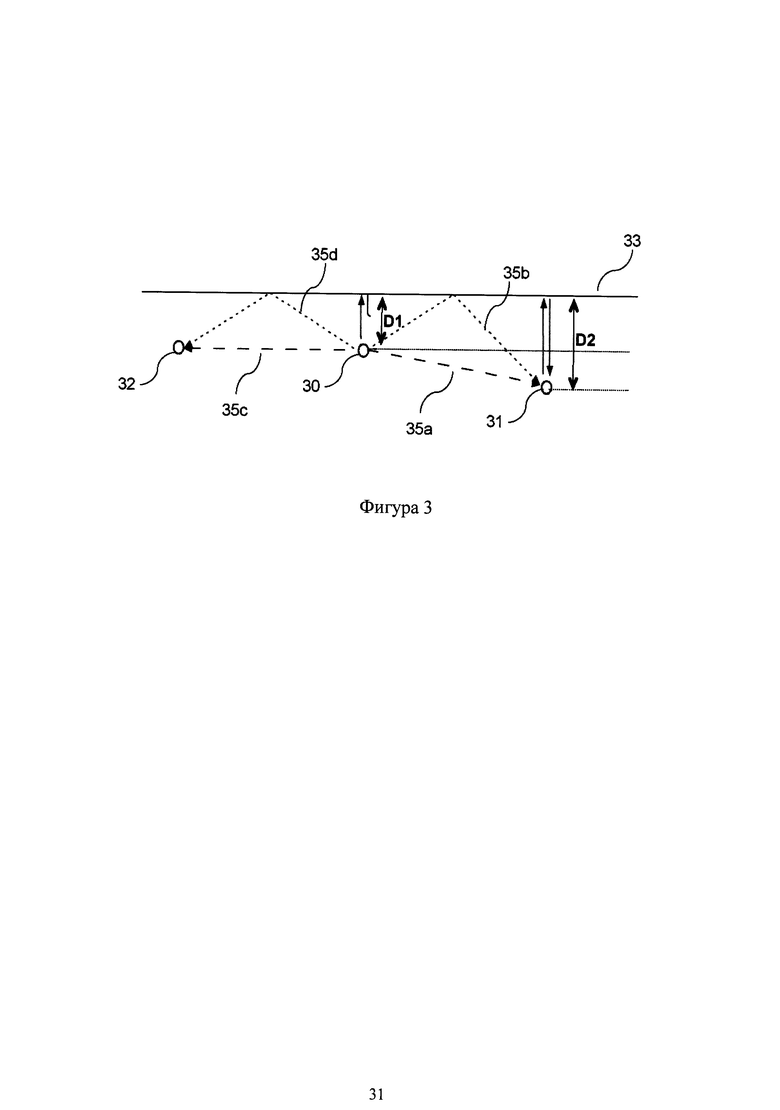
На фигуре 3 представлена схема связи, в которой реализуется заявленный способ, чтобы определить расстояние (или глубину) погружения акустического узла согласно одному варианту воплощения изобретения.
На этой фигуре рассматривается акустическая сеть, в которой определяется глубина акустического узла 30. Глубина данного узла - расстояние, отделяющее данный узел от морской поверхности 33.
Сеть фигуры 3 содержит два смежных узла 31, 32, расположенных с обеих сторон узла 30. Например, эти три узла 30, 31 и 32 погружены в воду приблизительно на десять метров ниже уровня моря 33.
На первой стадии узел 30 посылает многонаправленный акустический сигнал 20, например, в течение «времени выступления» и на полосе частот, зарезервированной с этой целью.
Если передающий узел 30 обнаружит отраженную сейсмоволну посланного акустического сигнала, эта отраженная сейсмоволна, вызванная отражением этого акустического сигнала морской поверхностью 33 (водно-воздушная поверхность раздела фактически действует как отражающая поверхность для акустических волн), передающий узел 30 может измерить длительность распространения между моментом излучения акустического сигнала и моментом приема отраженной сейсмоволны этого акустического сигнала. Более точно, длительность распространения, измеренная передающим узлом 30, является промежутком времени между моментом излучения импульсного акустического сигнала 22 и моментом приема отраженной сейсмоволны импульсного акустического сигнала, от начала отсчета по времени импульсного акустического сигнала относительно общего опорного времени.
В первом случае (локальные вычисления), передающий узел 30 выводит свою собственную глубину как функцию взвешенной длительности распространения и предопределенной величина акустической скорости звука (k) в морской среде, в которой перемещается данный узел.
Следует отметить, что акустическое измерение погружения относительно нечувствительно к ошибкам измерения скорости звука в контексте типичных погружений стримера (то есть на глубину приблизительно 10 метров). Фактически, ошибка измерения скорости звука 1 м/с приводит к ошибке измерения глубины менее 1 сантиметра.
Во втором случае (внешние вычисления), передающий узел 30 передает через проводную шину, соединенную со стримером, длительность распространения, ранее измеренную системой управления узла, которая обеспечивает вычисление глубины передающего узла 30.
Это первое измерение глубины, называется далее двухсторонним измерением погружения: оно характеризуется измерением длительности распространения по пути возврата сигнала между передающим узлом и отражающей поверхностью, выполненного передающим узлом.
Отметим, что всенаправленная диаграмма излучения электроакустического преобразователя, используемого узлами, не приводит к использованию этого вида преобразователя для реализации двухстороннего измерения погружения, которое скорее нуждается в направленной диаграмме излучения.
Когда двухстороннее измерение погружения не позволяет получить первое измерение глубины, используется другое измерение погружения (принцип которого описан ниже), чтобы преодолеть этот недостаток.
Например, в случае небольших глубин, время распространения между моментом излучения импульсного акустического сигнала и моментом приема отраженной сейсмоволны настолько мало, что измерение длительности распространения единственным передающим узлом не всегда возможно из-за известных явлений, относящихся к волнам-спутникам преобразователя. Кроме того, длительность распространения может быть неизмеримой, если образуется масса пузырьков (например, из-за следа судна), между морской поверхностью и узлом.
В этих двух последних случаях передающий узел 30 не обнаруживает поверхностной отраженной сейсмоволны, но глубина акустического узла 30 может быть определена другим узлом сети, например, смежным акустическим узлом 31 или 32, если этот другой узел получил импульсный акустический сигнал 22 (отраженный или нет, как описано ниже более подробно), посланный передающим узлом 30.
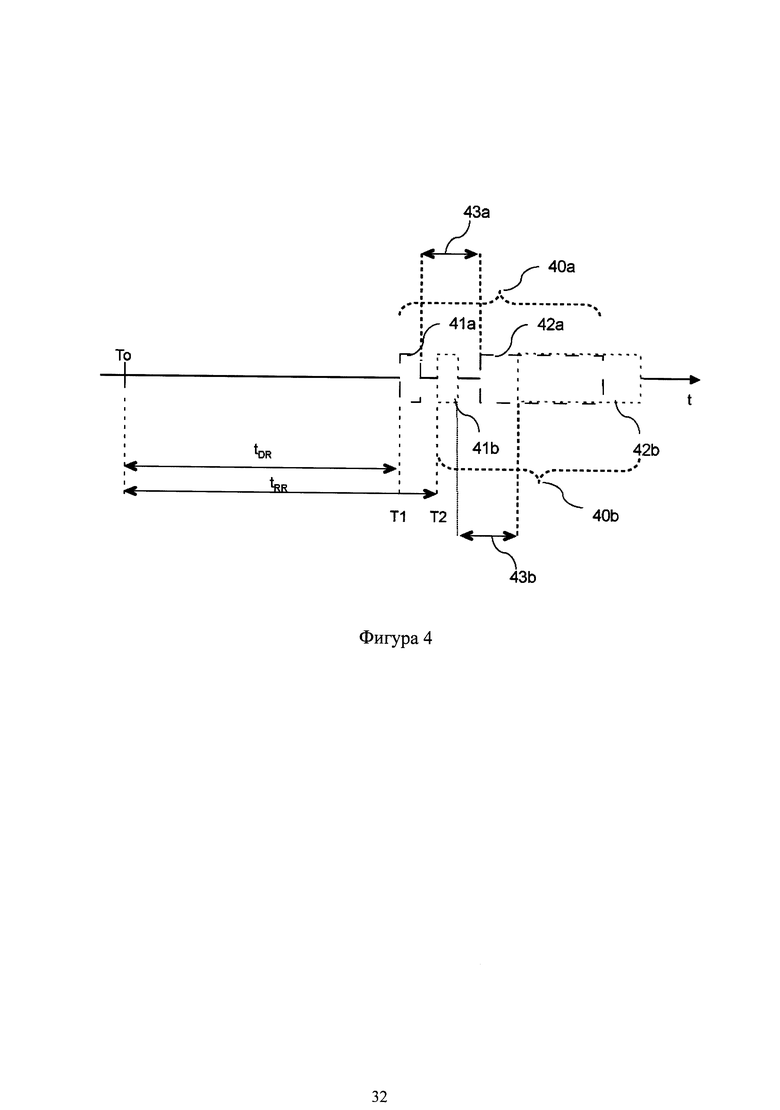
Узел 31, действуя как приемный узел, обнаруживает акустический сигнал 20 и, следовательно, импульсный акустический сигнал 22, посланный передающим узлом 30. Приемные узлы 31 затем измеряют первую длительность распространения сигнала между моментом излучения и моментом приема импульсного акустического сигнала 22, и этот импульсный акустический сигнал 22 проходит по прямому пути передачи (показано пунктирной линией 35а). Этот сигнал упоминается как "прямой звуковой импульс". Более конкретно, и как показано на фигуре 4, длительность распространения, измеренная приемным узлом 31, является длительностью (tDR), между моментом излучения (Т0) импульсного акустического сигнала 22 и моментом приема (T1) импульсного акустического сигнала 22.
Затем, приемный узел 31 обнаруживает отраженную сейсмоволну акустического сигнала 20 и, следовательно, импульсного акустического сигнала 22, посланного передающим узлом 30, - это отраженная сейсмоволна, вызванная отражением акустического сигнала 20 от морской поверхности 33. Как показано на фигуре 4, приемный узел 31 затем измеряет вторую длительность распространения (tRR) между моментом излучения (Т0) импульсного акустического сигнала 22 и моментом приема (T2) отраженной сейсмоволны импульсного акустического сигнала 22. Эта отраженная сейсмоволна соответствует акустическому импульсивному сигналу, полученному от передающего узла 30 по непрямому пути передачи (представленному пунктирной линией 35b). Этот сигнал упоминается как "отраженный звуковой импульс".
В первом случае от первой и второй длительностей распространения (tDR, tRR), ранее измеренных приемным узлом 31, последний может сам определить глубину передающего узла 30 в соответствии с условиями, упомянутыми ниже со ссылкой на фигуру 5.
Во втором случае, приемный узел 31 передает величины первой и второй длительностей распространения, ранее измеренных блоком управления системы, которая берет на себя задачу определения глубины передающего узла 30 в соответствии с условиями, упомянутыми ниже со ссылкой на фигуру 5.
Приведенные выше рассуждения относительно приемного узла 31 могут быть применены к узлу приемника 32 и к прямым и непрямым путям передачи 35с и 35d.
Это второе измерение глубины называется здесь односторонним измерением погружения: оно характеризуется измерением, выполненным соседним узлом (31 или 32) указанного передающего узла 30, длительностью распространения отраженного сигнала и длительностью распространения прямого сигнала.
Следует отметить, что число акустических узлов, показанных на фигуре 3, сознательно ограничено просто из соображений ясности, чтобы не перегружать излишними деталями фигуры и описание. Однако понятно, что изобретение может быть реализовано в контексте заявки с большим числом узлов (особенно, если нужно сделать измерения глубины более точными), как показано на фигуре 6. Кроме того, описание фигуры 3 рассматривает вариант воплощения только с узлами, смежными передающему узлу. Понятно, что изобретение может быть реализовано в контексте заявки с узлами, которые не являются смежными передающему узлу.
Фигура 4, уже частично описанная со ссылкой на фигуру 3, представляет собой схему синхронизации акустических сигналов, полученных акустическим узлом (31 или 32), по прямому пути передачи и косвенному пути передачи, согласно одному варианту воплощения изобретения.
Акустический сигнал 40а соответствует акустическому сигналу, посланному передающим узлом 30 и полученному непосредственно приемным узлом (31 или 32) без какого-либо отражения сигнала на морской поверхности 33. Он включает импульсный акустический сигнал 41а, сопровождаемый временем слушания 43а и акустической последовательностью 42а.
Акустический сигнал 40b соответствует акустическому сигналу, посланным передающим узлом 30 и полученным приемным узлом (31 или 32) по непрямому пути передачи. Иными словами, сигнал 40b представляет собой отраженную сейсмоволну, вызванную отражениями от морской поверхности или в общем смысле опорной поверхностью акустического сигнала. Он содержит отраженную сейсмоволну импульсного акустического сигнала 41b, сопровождаемого временем прослушивания 43b и отраженной сейсмоволной акустической последовательности 42b.
Время прослушивания 43а включает режим приема сигналов 40а и 40b, чтобы обнаружить отраженную сейсмоволну 41b импульсного акустического сигнала 22, посланного передающим узлом.
Следует отметить, что, когда приемным узлом принимаются два акустических сигнала, должно быть выполнено выделение между прямым путем и непрямым путем распространения сигнала. Можно считать, что:
- первый сигнал, полученный этим узлом, соответствует сигналу, переданному по прямому пути передачи, и второй сигнал соответствует сигналу, переданному по непрямому пути передачи; или
- более сильный сигнал соответствует сигналу, который прошел по прямому пути и менее сильный сигнал соответствует сигналу, который прошел по непрямому пути (из-за энергетических потерь, вызванных отражением сигнала от морской поверхности или морского дна).
Фигура 5 - математическое представление, иллюстрирующее способ вычисления глубины акустического узла в контексте конкретного варианта воплощения фигуры 3.
Идентичные элементы между фигурами 3 и 5 обозначены одними и теми же цифровыми позициями. Как и на фигуре 3, определяемая глубина (обозначенная позицией D1) соответствует расстоянию, разделяющему передающий узел 30 от морской поверхности 33.
Напомним, что передающий узел 30 здесь рассматривается как узел, погружаемый на небольшую глубину. Таким образом, этот передающий узел 30 не может определить свою собственную глубину D1 через двухстороннее измерение погружения. В таком случае глубина D1 должна быть определена приемным узлом 31 (или узлом 32), который вычисляет глубину передающего узла 30 на основе следующей формулы:

где
D1 - глубина между передающим узлом 30 и морской поверхностью 33, вычисленная приемным узлом 31;
D2 - глубина между узлом 31 и морской поверхностью 33, известная узлу 31;
tDR - длительность распространения прямого импульсного акустического сигнала, измеренного узлом 31 (то есть длительность распространения между моментами излучения и приема импульсного акустического сигнала);
tRR - длительность распространения отраженного импульсного акустического сигнала, измеренного узлом 31 (то есть длительность распространения между моментом излучения импульсного акустического сигнала и моментом приема отраженной сейсмоволны импульсного акустического сигнала);
k - предопределенная величина акустической скорости звука.
Фактически, в соответствии с теоремой Пифагора, мы можем написать следующие формулы: HR2=DR2-(D1-D2)2 и HR2=RR2-(D1+D2)2, при RR=RR1+RR2.
От этих двух формул мы можем вывести выражение HR2=DR2-(D1-D2)2=RR2-(D1+D2)2, которое после упрощения приводит к формуле
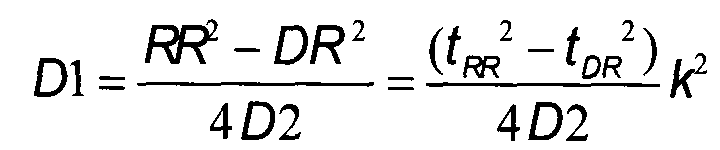 .
.
Эта формула показывает, что если передающий узел 30 не может выполнить измерение своей собственной глубины D1, достаточно иметь, по меньшей мере, один узел (что имеет место с приемным узлом 31 в данном случае), для которого глубина D2, так же как длительность распространения прямого импульсного акустического сигнала (tDR) и длительность распространения отраженного импульсного акустического сигнала (tRR) известны, чтобы вывести глубину D1.
Величина глубины D2 может быть получена, например, посредством следующих действий:
- величина набора определяется пользователем путем использования системы управления;
- измерение давления выполняется датчиком давления узла 31;
- измерение длительности распространения получается после предварительного выполнения одностороннего измерения погружения или двухстороннего измерения погружения (или путем обоих измерений) согласно способу изобретения для узла 31.
Если приемный узел 31 не имеет никакой информации о глубине D2, он все еще может определить относительное значение глубины D1 относительно передающего узла 30. Таким образом, благодаря вышеупомянутой формуле (I), знание глубины уникального узла в сети достаточно, чтобы вывести глубину, от соседа к соседу, всех оставшихся узлов сети. Например, возьмем ситуацию фигуры 3, в которой не известна глубина D2, и получено относительное значение D1. С учетом нескольких узлов 31, 32, глубина D3 которых известна, абсолютное значение D2 может быть определено формулой (I). Затем, принимая во внимание несколько узлов 30, 31, абсолютное значение D1 может быть выведено из формулы (I) как функция величины D2, определенной с узлом 32.
Иными словами, даже если передающий узел 30 не обнаруживает поверхностной отраженной сейсмоволны от своего собственного посланного сигнала, глубина D1 этого узла все еще может быть выведена одним другим узлом или несколькими другими узлами сети.
Можно предусмотреть вариант воплощения, в котором передающий узел 30 может определить свою собственную глубину (двухстороннее измерение погружения) и, по меньшей мере, другой узел также вовлекается в определение величины глубины передающего узла (одностороннее измерение погружения).
Таким образом, блок управления системы может иметь в своем распоряжении множество величин глубины (которая может быть охарактеризована относительными или абсолютными значениями), давая возможность выполнить математический процесс, чтобы уточнить измерения глубины.
Следовательно, чем большее число узлов вовлечено в процесс определения глубины узла, тем точнее величина глубины. Фактически, имея в центре управления множество величин глубины, система управления может выполнить, например, среднее значение этих величин, уменьшая, таким образом, стандартное отклонение при измерении глубины. Таким образом, повышается надежность измерения глубин. В конкретном варианте воплощения можно также предусмотреть возможность реализации взвешенной средней величины глубины, полученной для данного узла, как функции критерия качества полученной отраженной сейсмоволны сигнала. Чем выше качество отраженной сейсмоволны сигнала, тем больший вес применяется к соответствующей величине глубины.
Согласно одному варианту воплощения изобретения, можно предусмотреть выполнение контроля качества на величинах глубины, полученных измерением датчиков давления в сети. Действительно, в случае, если один узел, несколько узлов или все узлы сети оборудованы датчиками давления, величина глубины от датчика давления может быть сравнена с величиной глубины (или усредненными величинами глубины), полученными из варианта воплощения акустического погружения измерительного способа согласно изобретению (обеспечение двухсторонних измерений погружения и/или односторонних измерений погружения), чтобы утвердить или отвергнуть данные по глубине датчиков давления. Например, две отдаленные величины могут быть синонимичны ошибкам датчика давления. Это позволяет повысить надежность измерений погружения.
Фигура 6 иллюстрирует пример сети 60 из акустических узлов 63, в которой можно реализовать способ получения данных о глубине согласно одному варианту воплощения, совместимому с изобретением.
Акустические узлы 63 расположены вдоль множества стримеров 62, буксируемых катером 61, который имеет блок управления и навигационную систему. Узлы, представленные на чертеже черными точками, являются узлами сети, которые могут выполнить двухстороннее измерение погружения, а остальные узлы не способны выполнять подобные измерения.
Когда несколько узлов сети могут осуществить двухсторонние измерения погружения, система уравнений, управляемая системой управления, завышена (там больше уравнений, чем неизвестных), и неопределенность относительно измерений погружения значительно уменьшена.
Например, узел, глубина которого определяется, имеет шесть узлов, из которых четыре узла могут выполнять двухсторонние измерения погружения, чтобы получить величину глубины со стандартным отклонением, деленным на два.
С целью упрощения описания настоящего изобретения вышеупомянутое описание рассматривает только отраженную сейсмоволну, вызванную отражением импульсного акустического сигнала от морской поверхности. Однако ясно, что изобретение может быть реализовано в заявке с отраженной сейсмоволной в результате отражения акустического звукового импульса дном океана. Фактически, электроакустический преобразователь, по определению, посылает сигналы в разных направлениях, и их можно обнаружить как на поверхности, так и на дне океана. Это особенно интересно для разведки на малой глубине (также называемой мелководной конфигурацией) и особенно в головной части стримеров, чтобы избежать возможного ухудшения стримеров на дне. Чтобы отличить сигнал сейсмоволны, отраженной от морской поверхности, от сигнала сейсмоволны, отраженной от дна моря, можно предусмотреть выполнение функции тектонического окна соответствующей обработкой сигналов. Таким образом, чтобы обнаружить сейсмоволну, отраженную от дна океана, должно быть определено тектоническое окно наблюдения, чтобы исключить теоретический момент приема отраженной сейсмоволны от морской поверхности, которая зависит от средней глубины стримеров.
Предложен способ получения расстояния от узла до поверхности (D1) между опорной поверхностью (33) и первым узлом (30), принадлежащим сети, содержащей множество узлов, расположенных вдоль буксируемых линейных акустических антенн, и в котором множество акустических последовательностей передается между узлами, при этом каждая последовательность используется для оценки межузлового расстояния как функции длительности распространения последовательности между узлами. После излучения первым узлом (30) данного сигнала: первый узел измеряет первую длительности распространения первой отраженной сейсмоволны в результате первого отражения опорной поверхностью данного сигнала, и первая величина расстояния от узла до поверхности получается как функция этой первой длительности распространения; и/или второй узел (31, 32) измеряет вторую длительность распространения второй отраженной сейсмоволны в результате второго отражения данного сигнала от опорной поверхности, и вторая величина расстояния от узла до поверхности получается как функция этой второй длительности распространения. 4 н. и 9 з.п. ф-лы, 6 ил.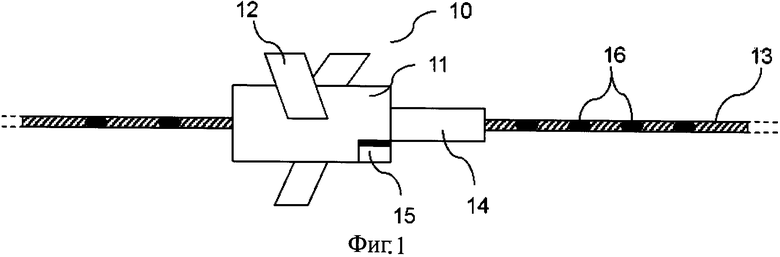
1. Способ получения первого расстояния от узла до поверхности (D1) между опорной поверхностью (33) и первым узлом (30), принадлежащим сети, содержащей множество узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором между узлами передается множество акустических последовательностей (21), причем каждая переданная акустическая последовательность используется для оценки, по меньшей мере, одного межузлового расстояния как функции длительности распространения между передающим узлом и, по меньшей мере, одним приемным узлом указанной акустической последовательности, отличающийся тем, что осуществляют:
- излучение указанным первым узлом (30) данного акустического сигнала в момент излучения (Т0);
- измерение, по меньшей мере, одним вторым узлом (31, 32):
- первой длительности распространения (tRR) между указанным моментом излучения и моментом приема (Т2) отраженной сейсмоволны в результате отражения указанного акустического сигнала от опорной поверхности;
- второй длительности распространения (tDR) между указанным моментом излучения (К) и моментом приема (Т1) данного акустического сигнала без отражения указанного акустического сигнала от опорной поверхности;
- получение, по меньшей мере, одной первой величины первого расстояния от узла до поверхности, при этом каждая величина служит как функция указанной первой (tRR) и второй (tDR) длительности распространения.
2. Способ по п.1, отличающийся тем, что указанные узлы содержат преобразователи, используемые для передачи акустических последовательностей, причем стадии измерения первой и второй длительностей распространения выполняются указанными преобразователями.
3. Способ по п.1, отличающийся тем, что указанные узлы встроены в буксируемые линейные акустические антенны.
4. Способ по пункту 1, отличающийся тем, что он дополнительно содержит стадию получения величины второго расстояния от узла до поверхности (D2) между опорной поверхностью и указанным, по меньшей мере, одним вторым узлом, а также тем, первая величина указанного первого расстояния от узла до поверхности (D1) является функцией:
- величины указанного второго расстояния от узла до поверхности (D2);
- указанных первой (tRR) и второй (tDR) длительностей распространения; и
- величины акустической скорости звука.
5. Способ по пункту 1, отличающийся тем, что он дополнительно содержит стадию реализации взвешенного среднего числа, по меньшей мере, двух первых величин первого расстояния от узла до поверхности (D1), полученной на указанной стадии получения, как функции критерия качества отраженной сейсмоволны.
6. Способ по пункту 1, отличающийся тем, что он дополнительно содержит стадии:
- получения второй величины первого расстояния от узла до поверхности (D1) в результате измерения давления; и
- анализ уровня качества, сравнивая указанную вторую величину первого расстояния от узла до поверхности (D1) с указанной, по меньшей мере, одной первой величиной первого расстояния от узла до поверхности (D1).
7. Способ по пункту 1, отличающийся тем, что он содержит стадию фильтрования отраженной сейсмоволны, полученной вторым узлом, применяя временное окно, чтобы сохранить только сейсмоволну, отраженную указанной опорной поверхностью.
8. Способ по пункту 1, отличающийся тем, что указанная опорная поверхность принадлежит группе, включающей морскую поверхность и дно океана.
9. Способ по пункту 1, отличающийся тем, что указанный данный акустический сигнал является одной из указанных акустических последовательностей (21) или импульсным акустическим сигналом (22), который предшествует или следует за одной из указанных акустических последовательностей (21) в предопределенном периоде передачи, который выделен первому узлу, и также тем, что указанный данный акустический сигнал сопровождается временем прослушивания (23).
10. Способ по пункту 1, отличающийся тем, что указанная стадия получения указанной, по меньшей мере, одной первой величины первого расстояния от узла до поверхности выполняется указанным, по меньшей мере, одним вторым узлом или системой управления узлов сети.
11. Продукт компьютерной программы, содержащий команды кода программы для реализации способа согласно, по меньшей мере, одному из пп. 1-10, когда указанная программа выполняется на компьютере.
12. Машиночитаемые средства памяти, хранящие компьютерную программу, содержащую ряд команд программы, выполняемой компьютером, для реализации способа согласно, по меньшей мере, одному из пп. 1-10.
13. Устройство для определения расстояния от узла до поверхности (D1) между опорной поверхностью (33) и первым узлом (30), принадлежащим сети, содержащей множество узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором множество акустических последовательностей (21) передается между узлами, причем каждая переданная акустическая последовательность используется для оценки, по меньшей мере, одного межузлового расстояния как функции длительности распространения между передающим узлом и, по меньшей мере, одним приемным узлом указанной акустической последовательности, содержащее:
- средства для получения:
- первой длительности распространения между моментом излучения данного акустического сигнала и моментом приема отраженной сейсмоволны в результате отражения указанного акустического сигнала от опорной поверхности;
- второй длительности распространения между указанным моментом излучения и моментом приема данного акустического сигнала без отражения указанного акустического сигнала от опорной поверхности;
- средства для получения, по меньшей мере, одной величины расстояния от узла до поверхности (D1) как функции указанных первой и второй длительностей распространения.
| US2005058022 A1, 17.03.2005 | |||
| US2007091719 A1, 26.04.2007 | |||
| US2008025146 A1, 31.01.2008 | |||
| US2009003135 A1, 01.01.2009 | |||
| US2008008042 A1, 10.01.2008 | |||
| US2006256654 A1, 16.11.2006. |

