1. ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Область изобретения относится к сбору геофизических данных. Это также относится к оборудованию, требуемому для изучения морского дна и свойств осадочных пород.
Более конкретно, изобретение относится к способу для оценки расстояния между узлами в сети акустических узлов, расположенных вдоль буксированных акустических линейных антенн.
В частности, изобретение может быть применено к области разведки нефтяных месторождений, используя сейсмический способ (морская нефтеразведка), но может также представлять интерес для любой другой области, где требуется система, выполняющая сбор геофизических данных в морской среде.
2. ИЗВЕСТНЫЕ ТЕХНОЛОГИИ
Ниже в этом документе описываются проблемы, возникающие при сборе сейсмических данных для промышленной нефтеразведки. Изобретение, конечно, не ограничено этой конкретной областью применения, но представляет интерес для любого способа, который связан с аналогичными или подобными проблемами и задачами.
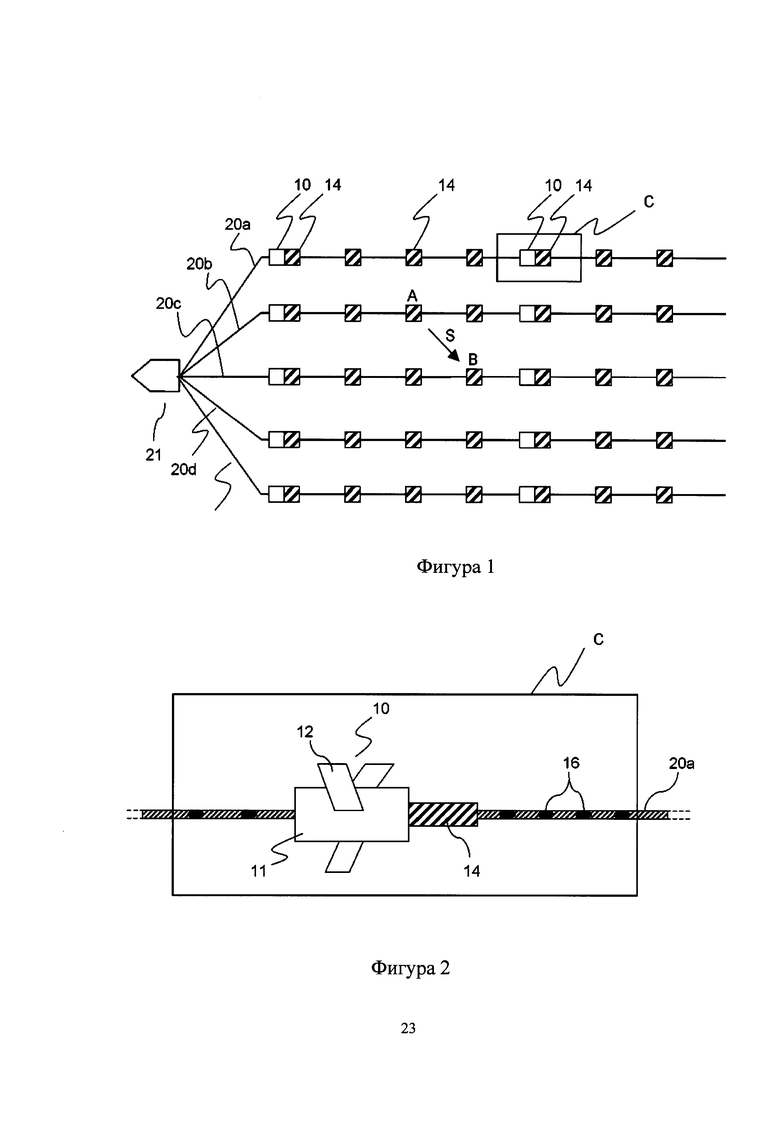
В операции получения сейсмических данных на месте разведки традиционно используют сети датчиков (ниже определяемые как "гидрофоны" для сбора данных в морской среде). Гидрофоны распределяются вдоль кабелей и формируют линейные акустические антенны, обычно называемые "стримерами" или "сейсмическими стримерами". Как показано на фигуре 1, сеть сейсмических стримеров от 20а до 20е буксируется сейсмическим судном 21. Гидрофоны обозначены цифровой позицией 16 на фигуре 2, которая подробно иллюстрирует блок C фигуры 1 (то есть часть стримера, которая обозначена позицией 20а).
Сейсмический способ основан на анализе отраженных сейсмических волн. Таким образом, чтобы собрать геофизические данные в морской среде, активируется один или несколько затопленных сейсмических источников, распространяющие всенаправленные пачки сейсмических волн. Волна давления, генерируемая сейсмическим источником, проходит через столб воды и облучает ультразвуком различные уровни морского дна. Часть сейсмических волн (т.е. акустические сигналы) отражаются и обнаруживаются гидрофонами, распределенными по длине сейсмических стримеров. Эти акустические сигналы обрабатываются и ретранслируются телеметрией от сейсмических стримеров до станции оператора, расположенной на сейсмическом судне, где выполняется обработка необработанных данных.
Известная проблема в этом контексте состоит в локализации сейсмических стримеров. Действительно, важно точно определить местоположение стримеров, в частности для:
- контроля положения гидрофонов (распределенных вдоль сейсмических стримеров), чтобы получить удовлетворительную точность изображения морского дна в зоне разведки;
обнаружение перемещений стримеров относительно друг друга (стримеры часто подвергаются различному естественному внешнему воздействию переменной величины, такому как ветер, волны, течения); и
- контроль навигации стримеров, в частности, в ситуации обхода препятствия (например, танкера).
Практически, задача нацелена на выполнение анализа морского дна с минимальным числом проходов судна через интересующую исследователей область. С этой целью число стримеров, установленных в акустической сети, как правило, является достаточно большим. Таким образом, вышеуказанная задача локализации стримеров, в основном, зависит от длины стримеров, которая, например, может изменяться от 6 до 15 километров.
Управление положением стримеров состоит в использовании управляющих навигационных устройств, обычно называемых "птицами" (белые квадраты, обозначенные позицией 10 на фигуре 1). Они устанавливаются равномерно (например, через каждые 300 метров) вдоль сейсмических стримеров. Функция этих «птиц» состоит в поддержании определенного интервала между стримерами. Иными словами, птицы используются для управления глубиной погружения и боковым положением стримеров. С этой целью, и как показано на фигуре 2, каждая птица 10 имеет тело 11, оборудованное ссылкой вращающимися крыльями 12 с механическим приводом (или в более общем смысле средствами механического перемещения), позволяющими изменить положение стримеров относительно друг друга (это называется управлением по горизонтали) и управлению стримерами пол погружению (это называется управлением по вертикали).
Чтобы выполнить локализацию сейсмических стримеров (позволяющую точное горизонтальное управление стримеров с помощью птиц), вдоль стримеров распределены акустические узлы. Эти акустические узлы представлены заштрихованными квадратами, обозначенные позицией 14 на фигурах 1 и 2. Как показано на фигуре 1, одни акустические узлы 14 сети связаны с птицей 10 (как показано на фигуре 2), а другие с ней не связаны.
В акустических узлах 14 под водой используются акустические средства связи, в дальнейшем именуемые электроакустическими преобразователями, позволяющими оценивать расстояния между акустическими узлами (ниже называемые "расстояниями между узлами"). Более конкретно, эти преобразователи представляют собой передатчики и приемники акустических сигналов, которые могут использоваться для оценки расстояния между узлами, разделяющим два акустических узла (действующие как узел передатчика и узел приемника соответственно), расположенные на двух различных стримерах (которые могут быть смежными или несмежными), в зависимости от прохождения акустическим сигналом расстояния, измеряемого между этими двумя узлами (т.е. время прохождения акустического сигнала от узла передатчика до узла приемника). Таким образом, в акустической сети это формирует петли интервалов между узлами, позволяя знать точное горизонтальное расположение всех стримеров.
Здесь преобразователь означает либо единственное электроакустическое устройство, состоящее из приемопередатчика (излучатель/приемник) акустических сигналов, либо комбинацию передающего устройства (например, гидролокатор) и приемного устройства (например, датчик давления (гидрофон) или датчик движения (акселерометр, геофон и т.д.).
Как правило, каждый акустический узел включает электроакустический преобразователь, который используется как узел передатчика и узел приемника (для передачи и приема, акустических сигналов, соответственно). В альтернативном воплощении первый набор узлов действует только как узел передатчика, и второй набор узлов действует только как узел приемника. Третий набор узлов (каждый из которых действует поочередно как узел передатчика и узел приемника) может также использоваться в комбинации с первыми и вторыми наборами узлов.
Расстояние dAB между двумя узлами A и B, как правило, может оцениваться на основе следующей формулы: dAB=c*tAB, где:
- узел А действует как узел передатчика, который передает
акустический сигнал C на узел B, действующий как узел приемника (см. пример на фигуре 1, где акустический сигнал C показан стрелкой между узлами, обозначенными как А и В);
- tAB обозначает продолжительность распространения (время пробега) между моментом излучения и моментом приема акустического сигнала, переданного от узла передатчика на узел приемника В (предполагая, что узел приемника и узел передатчика синхронизированы); и
- с обозначает "измеренное" или "предполагаемое" значение скорости
звука акустического сигнала.
Вычисление расстояния может быть выполнено любой навигационной системой (для размещения набора гидрофонов) или системой управления узлами (для предоставления полезной информации птицам для горизонтального привода), или непосредственно акустическими узлами (если они оборудованы электроникой, предназначенной для этого вычисления). Акустические узлы синхронизируются системой управления узлами через шину проводной связи, размещенной в стримерах.
В известных способах для оценки расстояния между узлами скорость звука с предполагается постоянной в вертикальной плоскости. Однако практически дело обстоит не так. Скорость звука в океане в значительной степени зависит от температуры, давления и минерализации воды и, таким образом, почти всегда зависит от рассматриваемой глубины (z); в этом случае мы говорим о профиле скорости звука (SSP)c(z).
Форма профиля скорости звука в области, где выполняется сейсмическая разведка, может изменить акустические пути звука. Звук не будет следовать по прямой линии (как предполагается в описанном выше способе оценки расстояния), но образуется кривая траектория луча из-за явлений преломления (согласно закону Декарта-Шелла). Действительно, в неравномерной среде звуковые лучи могут преломляться) из-за изменения скорости звука и, более точно, из-за ее градиента. Фронты звуковой волны преломляются к уровню, где скорость звука ниже, и преломление будет более выраженным, если изменение в скорости звука происходит быстро.
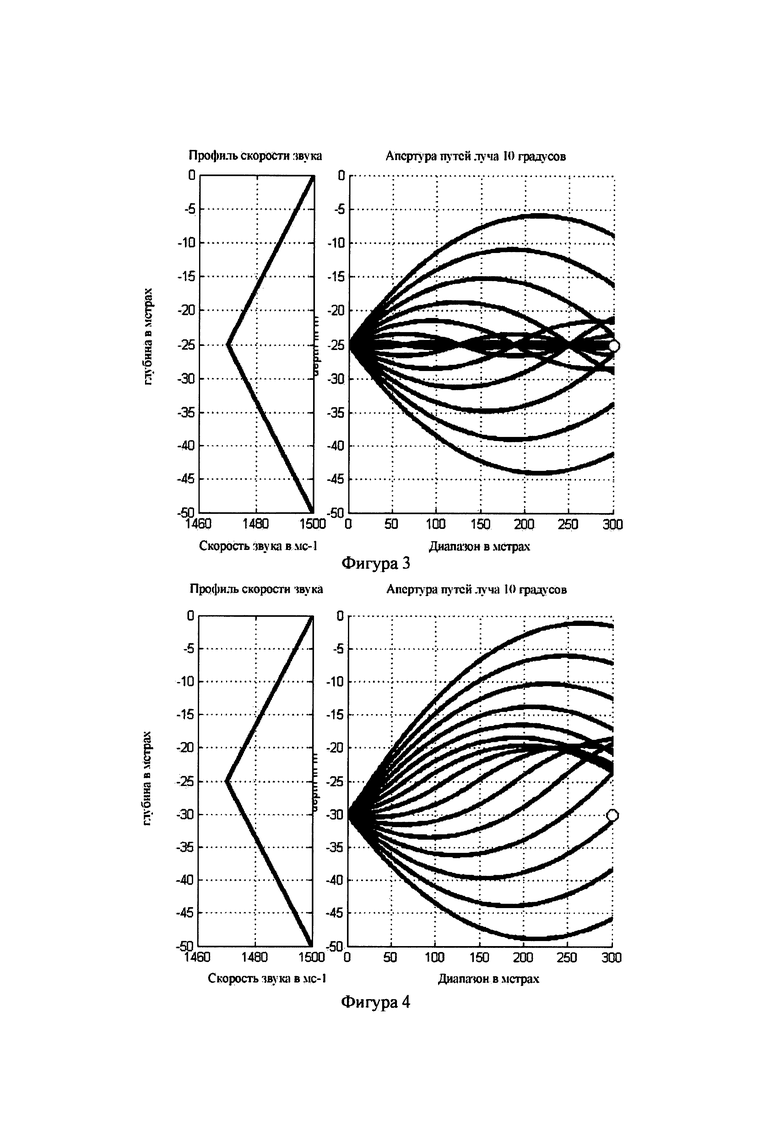
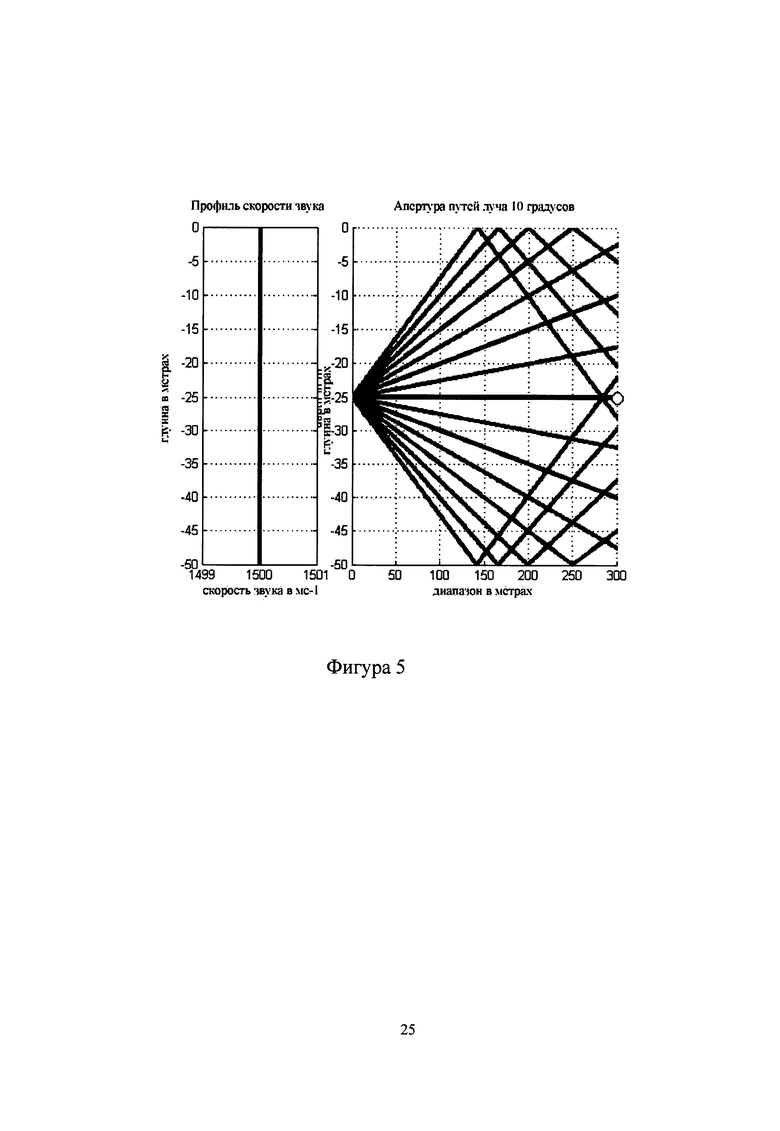
Фигуры 3-5 иллюстрируют влияние градиента скорости звука в канале. На каждой из этих фигур левая часть представляет профиль скорости звука, а правая часть представляет соответствующие пути луча, полученные способом трассировки пути луча для числовой апертуры 10° и расстояния 300 метров. Эти фигуры позволяют сравнить пути луча, сопровождаемые звуком в двух средах.
Как можно видеть в левой части этих фигур, первая среда (фигура 5) является столбом воды глубиной 50 м с постоянной скоростью звука, а вторая среда (фигуры 3 и 4) является средой, состоящей из водного столба глубиной от 25 до 50 метров с постоянным градиентом скорости звука.
Как можно видеть в правой части этих фигур, глубина источника (узел передатчика) составляет 25 м на фигуре 3, и 30 м на фигурах 3 и 4. Звук будет следовать за прямыми путями в первом случае (фигура 5) и криволинейными путями во втором случае (фигуры 3 и 4) в зависимости от глубины.
На криволинейном пути расстояние вдоль пути будет более важным фактором, чем в случае прямой линии. Таким образом, расстояние между узлами, полученное предыдущим способом (предполагая постоянный профиль скорости звука), будет завышен, что является синонимом недостаточной точности локализации или смещения в результате локализации (локализация стримеров на основе расстояний между узлами, полученными с множества пар акустических узлов).
Как описано выше, значение звуковой скорости, которое используется в известных способах для оценки расстояния между узлами, предполагается постоянным в вертикальной плоскости, что обычно является неправильным предположением. Кроме того, условия окружающей среды (температура, давление или минерализация воды), могут изменяться быстрыми темпами в зависимости от положения стримеров и условий погоды (волнение моря, влияние солнца, течения и т.д.). Форма профиля скорости звука, таким образом, может привести к явлению преломления, которое изгибает пути луча. Классическая формула, используемая для оценки расстояния между узлами (dAB=c·tAB) больше не является приемлемой, и tAB времени пробега будет временем пробега по кривой (т.е. LAB длины дуги), а не на прямой линии.
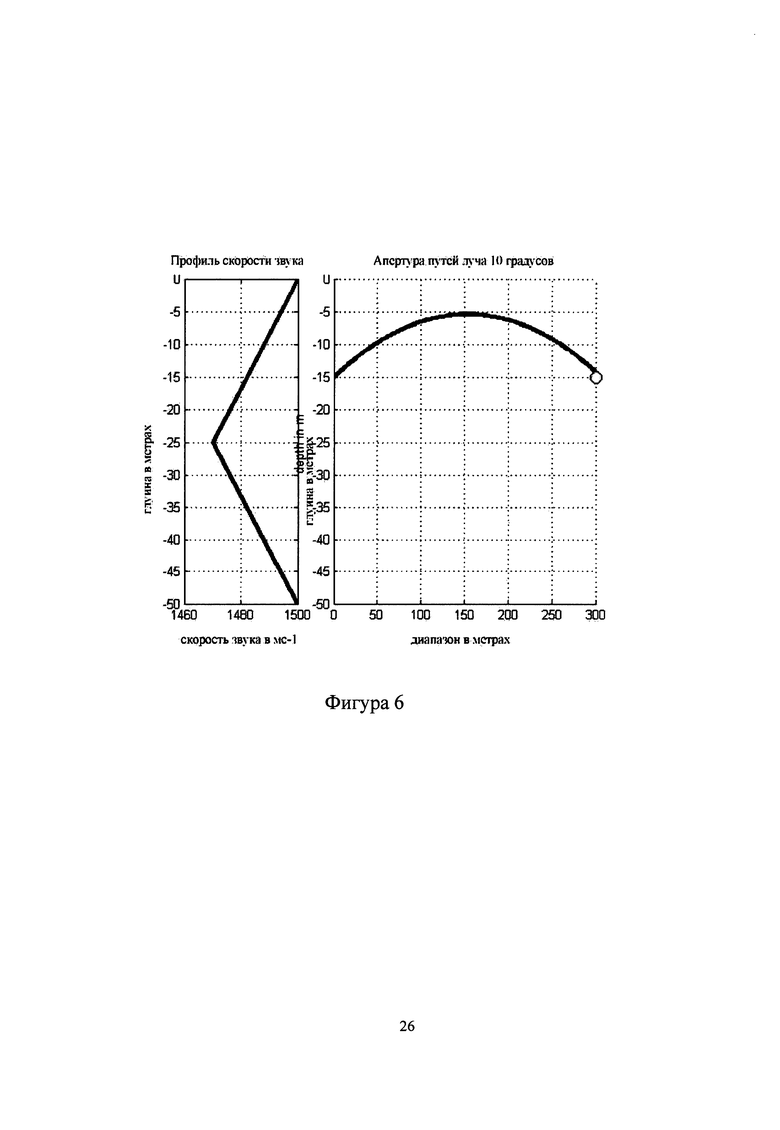
Предположение постоянной звуковой скорости приводит к ошибке в оценке предполагаемого расстояния между двумя соседними узлами. Например, для расстояния dAB=300 м это приводит к ошибке 0,5 мс-1 (классическое значение для измерителя скорости звука), что эквивалентно ошибке расстояния между узлами 10 см. С другой стороны, принимая, например, профиль скорости звука левой части фигуре 6 (столб воды 50 м и минимум глубины 25 м при скорости звука с постоянным градиентом), и источник на глубине 15 м, в правой части фигуре 6 показан прямой путь (полученный способом трассировки пути луча при числовой апертуре 10° и расстоянии 300 метров). Длина прямого пути равна 300,70 м, что соответствует ошибке 70 см на расстоянии между узлами, предполагая постоянную скорость звука 1482 мс-1 (на глубине 15 м) и реальном расстоянии 300 м.
Кроме того, если эти два рассматриваемые узла A и B находятся на разной глубине, путь луча от узла A до узла B и путь от узла B до узла A может отличаться и, таким образом, время пробега может отличаться в зависимости от пути сигнала.
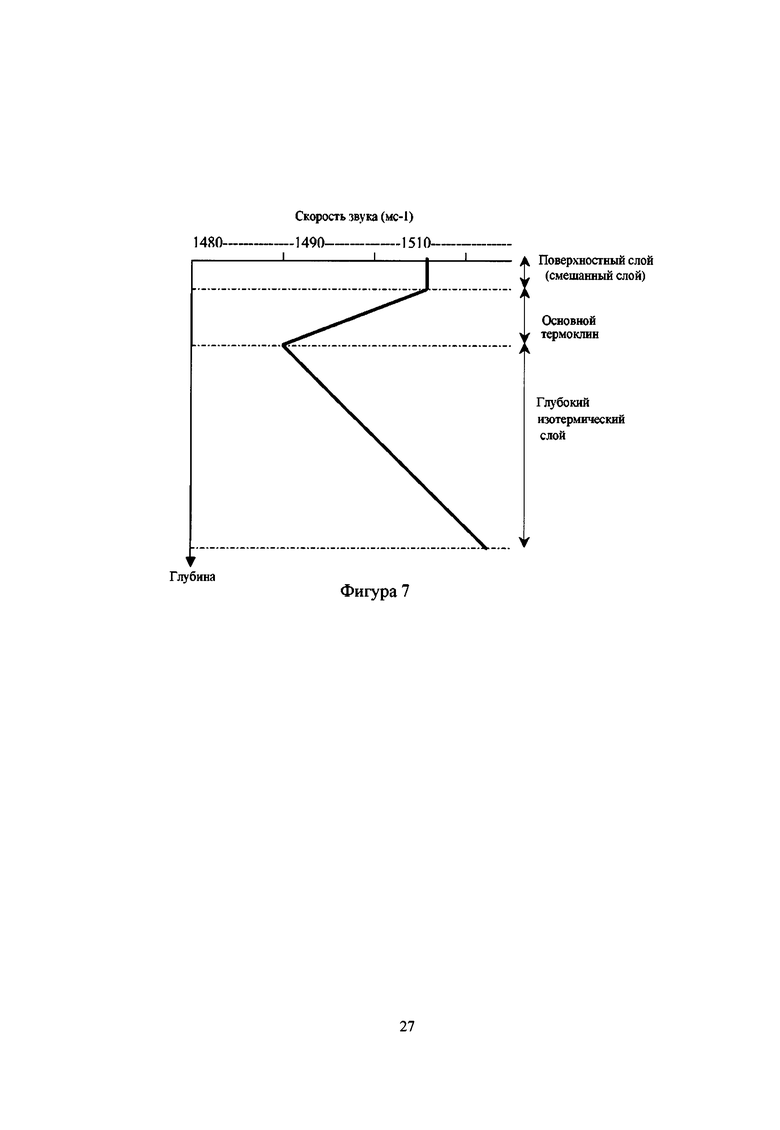
Как показано на фигуре 7, в теплом океане типичный профиль скорости звука имеет три части, соответствующие трем уровням водного столба: поверхностный слой (смешанный уровень), основной термоклин (слой в океане со значительным вертикальным отрицательным градиентом температуры) и глубокий изотермический уровень. Смешанный уровень может быть несколько метров толщиной, но может также расширяться на несколько десятков метром (в зависимости от сезонов, солнца, волнения моря, течения и т.д.). Смешанный уровень может исчезнуть в более холодных водах. Скорость звука является почти постоянной для смешанного уровня, но не для основного термоклина и глубокого изотермического уровня. Тенденция в области сбора сейсмических данных состоит в том, чтобы увеличить глубину погружения стримера, позволяя разместить стример (и акустические узлы) под смешанным уровнем (и поэтому, в основном, под термоклином) и, таким образом, усилить явления преломления. Как описано выше, это явление преломление вызывают ошибку, если для оценки расстояния между узлами используется классическая формула.
3. ОБЪЕКТЫ ИЗОБРЕТЕНИЯ
Изобретение, по крайней мере в одном воплощении, нацелено на преодоление различных указанных недостатков предшествующей технологии.
Более конкретно целью по меньшей мере одного варианта воплощения изобретения является обеспечить способ для оценки расстояния между узлами, который является более точным, чем известное техническое решение, обсужденное выше.
Дополнительной целью по меньшей мере одного варианта воплощения изобретения, является обеспечить способ такого типа, который прост в реализации и экономически выгоден.
4. КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В конкретном воплощении изобретение предлагает способ для оценки расстояния между узлами передатчика и приемника, принадлежащих сети, включающей множество узлов, расположенных вдоль буксируемых акустических линейных антенн, при этом акустический сигнал передается от узла передатчика до узла приемника через подводный акустический канал. Способ включает стадию оценки расстояния как функции оценки профиля скорости звука подводного акустического канала, причем указанный профиль скорости звука зависит от глубины погружения устройства.
Это конкретное воплощении является совершенно новым и изобретательским решением, потому что оно учитывает свойства среды, представленные, в частности, профилем скорости звука подводного акустического канала (между узлом передатчика и узлом приемника). Таким образом, этот способ для оценки расстояния между узлами более точен, чем обсужденное выше известное решение, и ликвидирует (или, по меньшей мере, уменьшает) потенциальное смещение, вызванное явлениями преломления.
В первом варианте воплощения указанная процедура оценки расстояния между узлами включает следующие стадии:
- получение времени пробега акустического сигнала от узла передатчика до узла приемника, глубины погружения узлов передатчика и приемника, скорости звука на глубине погружения узла передатчика и указанной оценки профиля скорости звука;
- определение приблизительно точного, соответствующего пути по прямой линии между узлом передатчика и узлом приемника как функции времени пробега и скорости звука на глубине погружения узла передатчика; оценку распространения звука между узлом передатчика и узлом приемника, используя модель распространения звука и знание глубины погружения узла передатчика и узла приемника, а также приблизительно точного и оценку профиля скорости звука, причем указанная стадия оценки распространения звука обеспечивает длину пути дуги между узлом передатчика и узлом приемника; и
- определение оценки расстояния, как разности между указанным приблизительно точным расстоянием между узлами и ошибкой оценки расстояния, определенной как разность между сказанной длиной дуги и указанными приблизительно точным расстоянием между узлами.
Этот первый вариант воплощения включает определение приблизительно точного расстояния известному способу (предполагая постоянную скорость звука в канале), и последующее исправление ошибки в этом приблизительном расстоянии между узлами. Ошибка определяется, используя модель распространения звука (например, модель теории луча) и среди других предположений, оценку профиля скорости звука подводного акустического канала.
Мы предполагаем, что длина пути дуги, обеспечиваемая на стадии оценки распространения звука (когда конец пути расположен на прямой линии примерно на расстояния между узлами от узла передатчика), приблизительно равным длине реального пути дуги (чей конец расположен на прямой линии на истинном расстояния между узлами от узла передатчика).
Согласно конкретному признаку стадия получения оценки профиля скорости звука выполняется, используя по меньшей мере один способ из группы, включающей:
- способ обращения по меньшей мере к одной базе данных профилей скорости звука; и
- способ прямого измерения, используя измерительное устройство и/или акустический способ.
Иными словами, оценка профиля скорости звука может быть получена простым стандартным способом.
Согласно одному конкретному признаку стадия получения оценки профиля скорости звука выполняется способом косвенного измерения, используя процесс инверсии, который извлекает оценку профиля скорости звука по меньшей мере из одного искаженного акустического сигнала при передаче акустических сигналов между несколькими узлами через указанный подводный акустический канал.
Таким образом, оценка профиля скорости звука может быть получена, используя процесс инверсии. Это более точный процесс, чем обращение к базам данных, не требует измерительного устройства и соответствует профилю скорости звука между двумя узлами рассматриваемой пары узлов.
Согласно одному конкретному признаку указанный процесс инверсии позволяет извлечь оценку профиля скорости звука из искаженного акустического сигнала, вытекающего из указанного акустического сигнала, передаваемого между указанным узлом передатчика и указанным узлом приемника через указанный подводный акустический канал.
Таким образом, используются только одна пара узлов (пара узлов, для которых получена оценка расстояния между узлами).
Согласно одному конкретному признаку, по меньшей мере, выполняются две итерации указанного процесса инверсии, используя пространственное разнесение и по меньшей мере две различные пары узлов и/или временное разнесение, используя те же самые пары узлов по меньшей мере в двух различных моментах времени, причем каждая итерация обеспечивает промежуточную оценку профиля скорости звука, а стадия получения оценки профиля скорости звука включает стадию объединения промежуточных оценок профиля скорости звука, чтобы получить конечную оценку профиля скорости звука.
Чем больше число итераций (и, соответственно, число промежуточных оценок), тем точнее конечная оценка профиля скорости звука.
Согласно одному конкретному признаку, указанные по меньшей мере две различные пары узлов имеют различные глубины, причем первая и вторая пары узлов определяются как расположенные на различной глубине, если узел передатчика первой пары не находится на той же самой глубине, что и узел передатчика второй пары, и/или если узел приемника первой пары не находится на той же самой глубине, что и узел приемника второй пары.
Это позволяет сделать выборку вертикального столба воды, которая дает лучшие результаты для конечной оценки профиля скорости звука.
Во втором варианте воплощения изобретения указанная стадия оценки расстояния между узлами включает стадию использования процесса инверсии, который извлекает оценку профиля скорости звука и оценку расстояния из искаженного акустического сигнала, вытекающего из указанного акустического сигнала, передаваемого между указанным узлом передатчика и указанным узлом приемника через указанный подводный акустический канал.
Во втором варианте воплощения изобретения, в противоположность первому воплощению, не делается никакого предположения относительно профиля скорости звука, и не требуется никакой предшествующей стадии оценки распространения звука (профиль скорости звука инвертирован как расстояния между узлами). Поэтому, логически, оценка профиля скорости звука и оценка расстояния являются более точными.
В третьем варианте воплощения указанная стадия оценки расстояния между узлами включает следующие стадии:
- получение указанной оценки профиля скорости звука; и
использование процесса инверсии, который извлекает оценку расстояния между узлами из искаженного акустического сигнала, вытекающего из указанного акустического сигнала, передаваемого между указанным узлом передатчика и указанным узлом приемника через указанный подводный акустический канал, и из знания указанной оценки профиля скорости звука.
В этом третьем варианте воплощения, как и в первом варианте воплощения, имеется предположение относительно профиля скорости звука, но в противоположность первому воплощению, здесь не требуется предшествующей стадии оценки распространения звука (расстояние между узлами инвертировано). Поэтому оценка расстояния является более точной. Третье воплощение экономически более выгодно, чем второе воплощение с точки зрения времени вычисления.
Согласно еще одному конкретному признаку (третьему варианту воплощения), стадия получения оценки профиля скорости звука выполняется, используя по меньшей мере один способ из группы включающей:
- способы обращения по меньшей мере к одной базе данных профилей скорости звука; и
- способы прямого измерения, используя измерительное устройство и/или акустический способ.
Иными словами, оценка профиля скорости звука может быть получена простым стандартным способом.
Согласно одному конкретному признаку (любого из второго и третьего варианта воплощения), указанная стадия расстояния между узлами включает следующие стадии:
- получение времени пробега акустического сигнала от узла передатчика до узла приемника, глубины погружения узла передатчика, скорости звука на глубине погружения узла передатчика;
- определение приблизительно точного, соответствующего пути по прямой линии между узлом передатчика и узлом приемника как функции времени пробега и скорости звука на глубине погружения узла передатчика; и
- указанный процесс инверсии инициализируется с указанным приблизительно точным расстоянием между узлами.
Иными словами, процесс инверсии (который извлекает оценку расстояния) инициализируется с приблизительно точным расстоянием между узлами, определенным простым известным способом, предполагающим постоянную скорость звука в канале).
Согласно одному конкретному признаку (любого из первого, второго и третьего воплощений), способ осуществляется указанным узлом приемника или централизованной системой.
В еще одном воплощении изобретение относится к продукту компьютерной программы, включающей команды программного кода для выполнения вышеупомянутого способа (в любом из его различных воплощений), когда указанная программа выполняется на компьютере или процессоре.
В еще одном воплощении изобретение относится к постоянному машиночитаемому носителю, хранящему программу, которая при ее выполнении компьютером или процессором, инициирует компьютер или процессор выполнять вышеупомянутый способ (в любом из его различных воплощений).
В еще одном воплощении изобретение предлагает устройство для оценки расстояния между узлом передатчика и узлом приемника, принадлежащим сети, включающей множество узлов, расположенных вдоль буксируемых акустических линейных антенн, при этом акустический сигнал передается от узла передатчика до узла приемника через подводный акустический канал, отличающееся тем, что устройство включает средство для оценки расстояния между узлами как функции оценки профиля скорости звука подводного акустического канала, причем указанный профиль скорости звука определяется в зависимости от глубины.
5. ПЕРЕЧЕНЬ ФИГУР
Другие признаки и преимущества изобретения станут понятными из последующего описания, снабженного примерами и ссылками на приложенные чертежи, на которых:
Фигура 1, уже описанная в связи с известным уровнем техники, представляет пример сети сейсмических стримеров, буксируемых сейсмическим судном;
Фигура 2, уже описанная в связи с известным уровнем техники, подробно иллюстрирует блок, обозначенный как С на фигуре 1 (т.е. часть стримера);
Фигуры 3-6, уже описанные в связи с известным уровнем техники, каждая представляет профиль скорости звука (левая часть фигуры) и соответствующие пути луча (правая часть фигуры);
Фигура 7, уже описанная в связи с известным уровнем техники, представляет пример профиля скорости звука, типичного для теплого района океана;
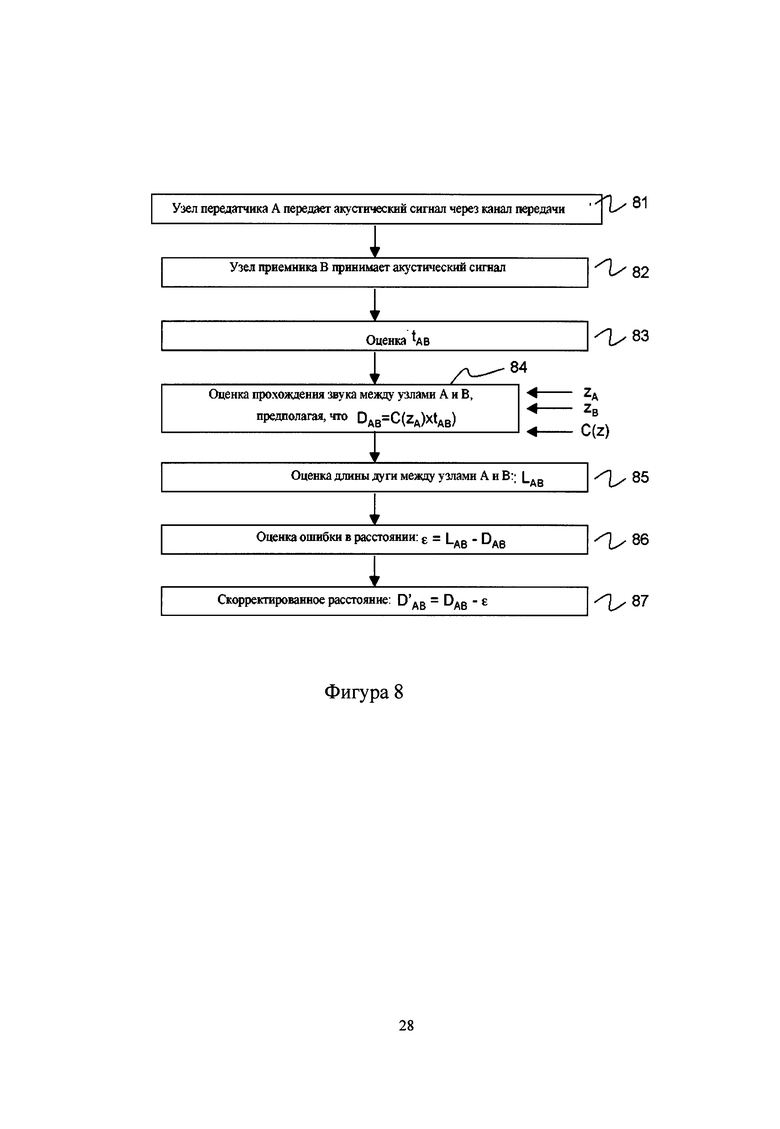
Фигура 8 - блок-схема первого воплощения способа согласно изобретению;
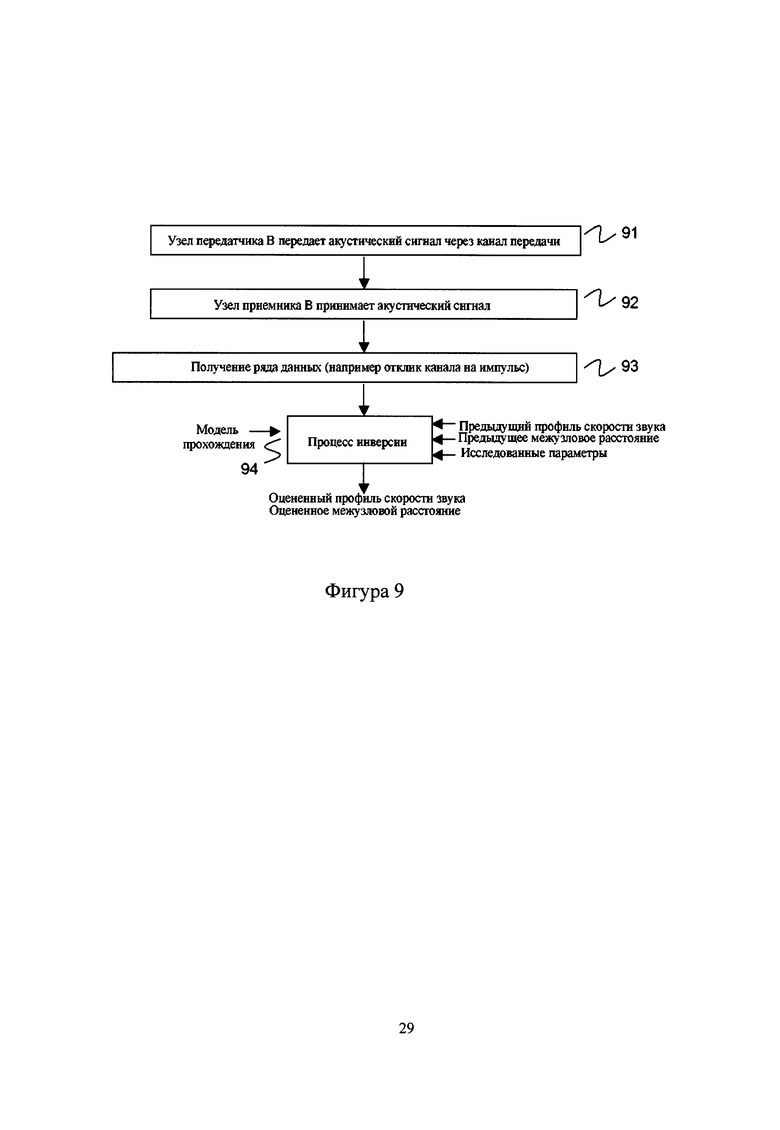
Фигура 9 - блок-схема второго воплощения способа согласно изобретению;
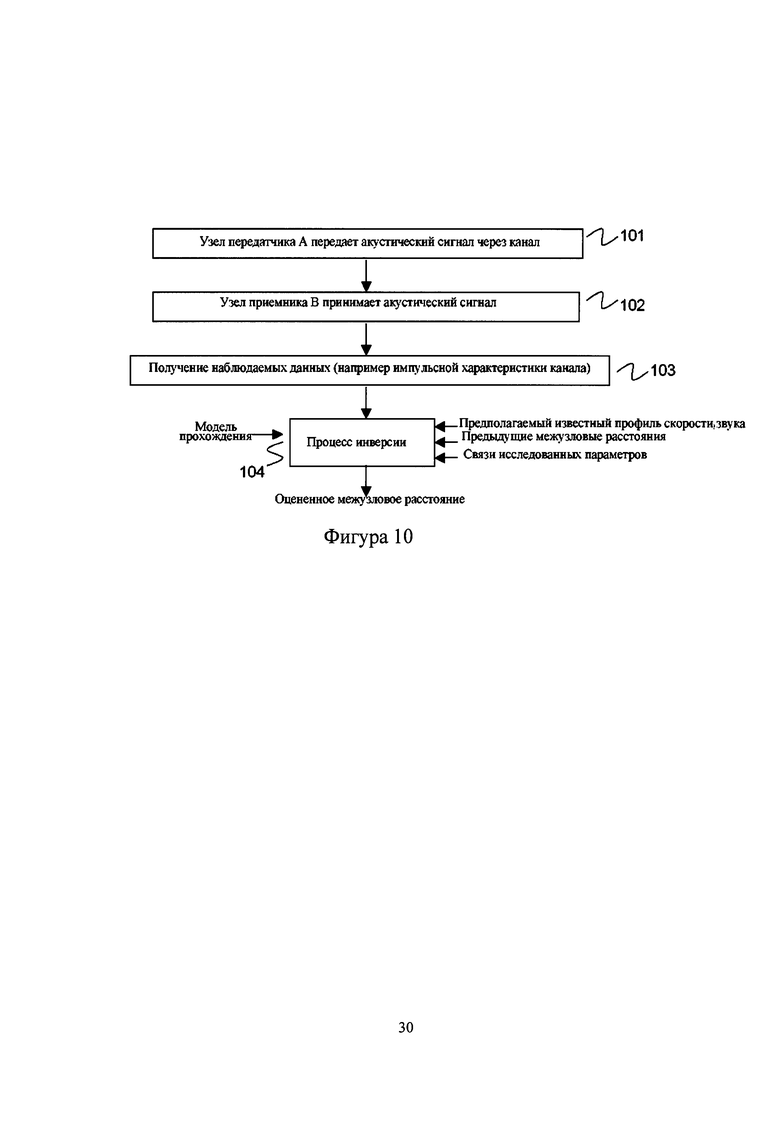
Фигура 10 - блок-схема третьего воплощения способа согласно изобретению;
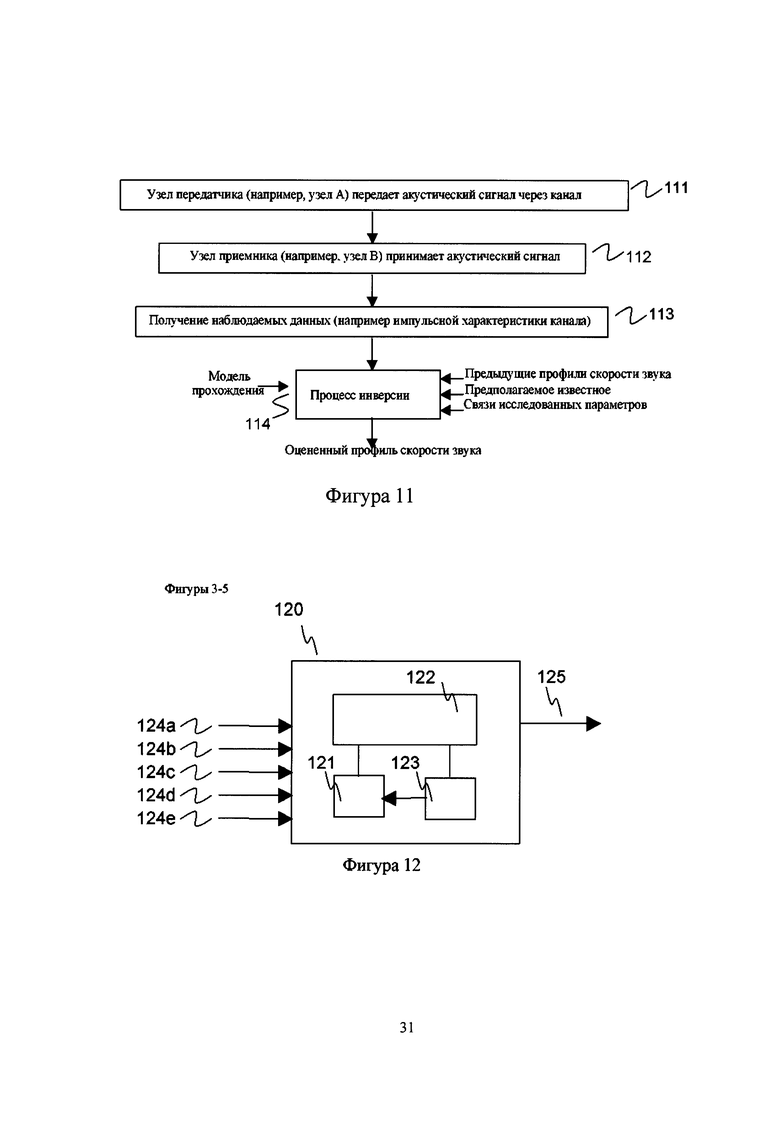
Фигура 11 - блок-схема процесса инверсии, обеспечивающего оценку профиля скорости звука, используемого как вход в первом воплощении на фигуре 8; и
Фигура 12 - упрощенная структура устройства оценки согласно конкретному воплощению изобретения.
6. ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигуры 1-7 уже описаны выше, как связанные с предшествующим уровнем техники.
В последующем описании это рассматривается, как пример оценки расстояния между узлом передатчика A и узлом приемника B, показанное на фигуре 1 и принадлежащее сети узлов 14, расположенных вдоль сейсмических стримеров 20а-20е.
На фигуре 8 представлено первое воплощение способа согласно изобретению.
На стадии 81 узел передатчика передает акустический сигнал на узел приемника B через подводный акустический канал.
На стадии 82 узел приемника В получает акустический сигнал.
Стадия 83 состоит в измерении времени пробега tAB между узлом передатчика A и узлом приемника В.
На стадии 84 из знания скорости звука C(ZA) на глубине погружения ZA узла A, определяется приблизительно точное расстояние DAB между узлами А и В, используя следующую классическую формулу: DAB=C(ZA)*tAB.
Точно так же, на стадии 84, зная глубины погружения узлов А и В (ZA и zB соответственно, которые могут отличаться друг от друга), приблизительно точные расстояния DAB (см. выше) и оценку профиля скорости звука C(z), мы оцениваем распространение звука между узлами А и В (используя модель распространения звука, например, теорию модели луча; и соответствующий способ вызывают "способом трассировки пути луча"), т.е. мы оцениваем форму (которая является дугой) реального пути между узлами А и В (длина LAB этой дуги оценивается на стадии 85).
Вместо теории модели луча могут использоваться другие модели распространения звука для оценки полученного сигнала в узле В, например, параболическое уравнение, интеграция числа волн или нормальных режимов (выбор зависит от рассматриваемой частоты, глубины воды, зависимости от диапазона и т.д.).
Ниже описываются различные способы получения оценки профиля скорости звука C(z).
На стадии 85, оценивается длина дуги (реального пути) LAB между узлами А и В. На стадии 86, зная длину дуги LAB, мы можем вычислить ошибку оценки расстояния: ε=LAB-DAB.
Наконец, на стадии 87 мы можем определить скорректированное расстояние D'AB, т.е. оценку расстояния между узлами А и В, вычисляя: D'AB=DAB-ε.
Таким образом, расстояние между узлами А и В оценивается более точно.
Имеются различные способы получения оценки профиля скорости звука C(z):
- использование предварительных сведений о среде: обращение консультация к глобальным базам данных профилей скорости звука;
- использование способа прямого измерения: использование измерительного устройства (такого как батитермограф, расходный батитермограф (ХВТ), расходный измеритель скорости звука (XSV) и т.д.); или
- использование способа косвенного измерения: использование процесса инверсии (см. ниже в описания фигуры 11); или
- использование акустического способа на различных узлах расположения, чтобы использовать их потенциальные различные глубины (см. способ BroadSeis (торговая марка).
Фигура 11 - блок-схема процесса инверсии, обеспечивающего оценку профиля скорости звука C(z), чтобы использовать его как вход в первом варианте воплощения на фигуре 8.
На стадии 111 узел передатчика (например, узел А или узел близкий к узлу А) передает акустический сигнал на узел приемника (например, узел В или узел близкий к узлу В) через подводный акустический канал.
На стадии 112, узел приемника получает акустический сигнал как принятый искаженный сигнал в зависимости от свойств канала. Действительно, сигнал, излучаемый узлами, подвергается отражениям от дна и поверхности океана или преломляется благодаря градиенту скорости.
На стадии 113 мы получаем ряд данных из принятого искаженного сигнала. Например, данные могут быть импульсной характеристикой канала между этими двумя узлами.
На стадии 114 полученные данные используются для выполнения инверсии свойств среды и, в частности, профиля скорости звука, предполагая, что расстояние между узлом передатчика и узлом приемника известно и равно ранее полученному приблизительно точному расстоянию между узлами А и В (DAB=C(ZA)*tAB). - Иными словами, использование данных, извлеченных из принятого искаженного сигнала, и их согласование с моделью распространения (через процесс оптимизации функции стоимости) позволяет получить оценку профиля скорости звука. Например, если полученные данные представляют собой импульсную характеристику канала между этими двумя узлами, выполняя, таким образом, соответствующий процесс реакции на импульс (MIR), дает оценку профиля скорости звука (по сравнению с наблюдаемым импульсного ответом с моделируемыми реакциями на импульс, каждый из которых соответствует различному известному звуковому профилю скорости).
На стадии 114, процесс инверсии может быть инициирован с оценкой, полученной от баз данных глобальных профилей скорости, или используя способ прямого измерения (как описано выше).
В одном из вариантов для получения лучших результатов выполняется несколько итераций (также называемых реализациями) процесса инверсии фигуры 11, чтобы использовать пространственное разнесение (с помощью различных пар узлов) и/или временное разнесение (используя те же самые несколько узлов, по крайней мере, в двух различных моментах времени). Каждая итерация обеспечивает промежуточную оценку профиля скорости звука (например, путем вычисления среднего).
В этом варианте, если различные узлы расположены на различных глубинах, полученная выборка вертикального водного столба дает лучшие результаты для оценки профиля скорости звука. Иными словами, выгодно, если различные пары узлов расположены на различных глубинах. Мы используем следующее определение: первая и вторая пары узлов имеют различные глубины, если узел передатчика первой пары имеет глубину, отличную от глубины узла передатчика второй пары, и/или если узел приемника первой пары имеет глубину, отличную от глубины узла приемника второй пары.
Обратимся теперь к фигуре 9, на которой представлен второй вариант воплощения способа согласно изобретению (процесс инверсии, который извлекает оценку профиля скорости звука и оценку расстояния между узлами).
На стадии 91 узел передатчика А передает акустический сигнал на узел приемника В через подводный акустический канал (то есть столб воды).
На стадии 92, узел приемника В получает акустический сигнал как принятый искаженный сигнал в зависимости от свойств канала. Действительно, сигнал, излучаемый узлами, подвергается отражениям от поверхности и дна океана или преломляется из-за градиента скорости звука.
На стадии 93 мы получаем ряд данных из принятого искаженного сигнала. Например, полученные данные могут быть импульсной характеристикой канала между этими двумя узлами.
На стадии 94, полученные данные используются для выполнения инверсии свойств среды и, в частности, для оценки профиля скорости звука и оценки расстояния LAB между узлами. Иными словами, использование данных, извлеченных из принятого искаженного сигнала, и их согласование с некоторой полученной моделью распространения (через процесс оптимизации функции стоимости) позволяет получить оценку профиля скорости звука и оценку расстояния между узлами. Например, если полученные данные представляют собой реакцию на импульс канала между этими двумя узлами, выполняя, таким образом, соответствующий процесс реакции на импульс (MIR), который дает оценку профиля скорости звука и оценку расстояния между узлами (по сравнению с наблюдаемой реакцией на импульс с моделируемыми реакциями на импульс, каждый из которых соответствует нескольким известным профилям скорости звука и известным расстояниям между узлами).
На стадии 94, процесс инверсии может быть инициирован с аппроксимированным расстоянием DAB между узлами (определенным как описано для первого варианта воплощения, показанного на фигуре 8: DAB=C(ZA)*tAB), то есть расстояние между узлами оценивается из предпосылки постоянной скорости звука.
Обратимся теперь к фигуре 10, на которой представлен третий вариант воплощения способа согласно изобретению (процесс инверсии, который извлекает только оценку расстояния между узлами).
На стадии 101 узел передатчика передает акустический сигнал на узел приемника В через подводный акустический канал (то есть столб воды).
На стадии 102, узел приемника В получает акустический сигнал как искаженный принятый сигнал в зависимости от свойств канала. Действительно, сигнал, излучаемый узлами, подвергается отражениям от поверхности и дна океана или преломляется из-за градиента скорости звука.
На стадии 103 мы получаем ряд данных из принятого искаженного сигнала. Например, полученные данные могут быть импульсной характеристикой канала между этими двумя узлами.
На стадии 104 полученные данные используются для выполнения инверсии свойств среды и, в частности, для оценки расстояния между узлами, предполагая, что профиль скорости звука известен (например, путем обращения к базам данных с глобальными профилями скорости звука, или используя способ прямого измерения (подробности приведены выше. Иными словами, использование данных, извлеченных из принятого искаженного сигнала, и их согласование с моделью распространения (через процесс оптимизации функции стоимости) позволяет получить оценку расстояния между узлами. Например, если полученные данные представляют собой реакцию на импульс канала между этими двумя узлами, выполняя, таким образом, соответствующий процесс реакции на импульс (MIR), который дает оценку расстояния между узлами (по сравнению с наблюдаемой реакцией на импульс с моделируемыми реакциями на импульс, каждая из которых соответствует различному известному расстоянию между узлами).
На стадии 104 процесс инверсии может быть инициирован с аппроксимированным расстоянием Dab между узлами (определенным как описано для первого варианта воплощения, показанного на фигуре 1), то есть расстоянием между узлами оцененным на основе постоянной скорости звука.
Обратимся теперь к фигуре 12, на которой представлена упрощенная структура устройства оценки 120 (используемого для оценки расстояние между узлами) согласно конкретному варианту воплощения изобретения.
Устройство оценки 120 может быть акустическим узлом (таким как узел приемника В в приведенным выше примере), системой управления узла или навигационной системой. Устройство включает постоянную память (ROM) 123, оперативную память (RAM) 121 и процессор 122. Постоянная память 123 (постоянный машиночитаемый носитель) хранит исполняемые команды программного кода, которые выполняются процессором 122, реализуя способ изобретения (например, стадии 82-87 из фигуры 8, или стадии 92-94 из фигуры 9, или стадии 102-104 из фигуры 10).
При инициировании указанные команды программного кода передаются из постоянной памяти 123 в оперативную память 121 для их выполнения процессором 122. Аналогичным образом, оперативная память 121 включает регистры для хранения переменных и параметров, требуемых для этого выполнения. Процессор 122 получает следующую информацию (позиции 124а-124е соответственно):
- акустический сигнал (переданный узлом передатчика и
принятый узлом приемника),
- скорость звука C(ZA) в зоне погружения узла А,
- глубины погружения узлов А и В, ZA и zB соответственно,
- оценку профиля скорости звука C(z), и
- модель распространения. По командам программного кода процессор 122 выдает оценку расстояния между узлами 125.
Все стадии вышеуказанного способа оценки могут быть реализованы одинаково хорошо:
- выполнением команд программного кода, выполняемых
перепрограммируемым вычислительным устройством, таким как PC, DSP (цифровой сигнальный процессор) или микроконтроллер. Эти команды программного кода могут быть сохранены в постоянном машиночитаемом носителе, который может быть съемным (например, гибкий диск, CD-ROM или DVD-ROM) или несъемным устройством памяти; или
- специализируемым узлом или компонентом, таким как FPGA (вентильная матрица, программируемая пользователем), ASIC (специализированная интегральная схема) или любым специализированным аппаратным компонентом.
Предлагается способ для оценки межузлового расстояния между узлом передатчика (А) и узлом приемника (В), принадлежащих сети, включающей множество узлов, расположенных вдоль буксируемых акустических линейных антенн (20а-20е), причем акустический сигнал передается от узла передатчика до узла приемника через подводный акустический канал. Способ включает стадию оценки расстояния между узлами как функцию оценки профиля скорости звука подводного акустического канала, при этом указанный профиль скорости звука зависит от глубины погружения устройства. 3 н. и 10 з.п. ф-лы, 11 ил.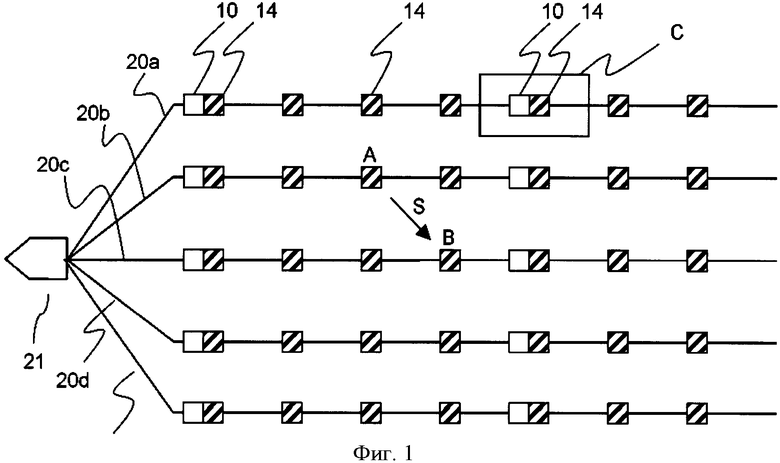
1. Способ для оценки межузлового расстояния между узлом передатчика и узлом приемника, принадлежащим сети, содержащей множество узлов, расположенных вдоль буксируемых акустических линейных антенн, с использованием передачи акустического сигнала от узла передатчика до узла приемника через подводный акустический канал и оценки межузлового расстояния как функции оценки профиля скорости звука подводного акустического канала, при этом указанный профиль скорости звука зависит от глубины, включающий следующие стадии:
- получение времени пробега акустического сигнала от узла передатчика до узла приемника, глубин погружения узла передатчика и узла приемника, скорости звука на глубине погружения узла передатчика и указанной оценки профиля скорости звука;
- определение межузлового расстояния, соответствующего пути по прямой линии между узлом передатчика и узлом приемника, как функции времени пробега и скорости звука на глубине погружения узла передатчика;
- оценку распространения звука между узлом передатчика и узлом приемника, используя модель распространения звука с использованием известной глубины погружения узла передатчика и узла приемника, определение расстояния между узлами и оценку профиля скорости звука, при этом указанная стадия оценки распространения звука обеспечивает длину пути дуги между узлом передатчика и узлом приемника; и
- оценку межузлового расстояния как разность между указанным расстоянием между узлами и ошибкой оценки расстояния, определенного как разность между указанной длиной дуги и указанным расстоянием между узлами.
2. Способ по п. 1, в котором стадия получения оценки профиля скорости звука выполняется, используя по меньшей мере один способ из группы, включающей:
- обращение по меньшей мере к одной базе данных профилей скорости звука; и
- прямое измерение, используя измерительное устройство и/или акустический способ.
3. Способ по п. 1, в котором стадия получения оценки профиля скорости звука выполняется путем косвенного измерения с использованием процесса инверсии, включающего извлечение оценки профиля скорости звука по меньшей мере из одного искаженного акустического сигнала, вытекающего из акустического сигнала, передаваемого между несколькими узлами через указанный подводный акустический канал.
4. Способ по п. 3, в котором указанный процесс инверсии включает извлечение оценки профиля скорости звука из искаженного акустического сигнала, вытекающего из указанного акустического сигнала, передаваемого между указанным узлом передатчика и указанным узлом приемника через указанный подводный акустический канал.
5. Способ по п. 3, в котором по меньшей мере две итерации указанного процесса инверсии выполняют с использованием пространственного разнесения по меньшей мере двух различных пар узлов и/или временного разнесения, используя те же самые пары узлов по меньшей мере в двух различных моментах времени, причем каждая итерация обеспечивает промежуточную оценку профиля скорости звука, а оценка профиля скорости звука включает стадию объединения промежуточных оценок профиля скорости звука для получения конечной оценки профиля скорости звука.
6. Способ по п. 5, в котором указанные по меньшей мере две различные пары узлов расположены на различных глубинах, при этом первая и вторая пары узлов определяются как имеющие различные глубины, если узел передатчика первой пары не находится на той же самой глубине, что и узел передатчика второй пары, и/или если узел приемника первой пары не находится на той же самой глубине, что и узел приемника второй пары.
7. Способ по п. 1, в котором указанная оценка межузлового расстояния включает стадию использования процесса инверсии, включающего извлечение оценки профиля скорости звука и оценку расстояния между узлами из искаженного акустического сигнала, вытекающего из указанного акустического сигнала, передаваемого между указанным узлом передатчика и указанным узлом приемника через указанный подводный акустический канал.
8. Способ по п. 1, в котором указанная оценка межузлового расстояния включает следующие стадии:
- получение указанной оценки профиля скорости звука; и
- использование процесса инверсии для извлечения оценки расстояния между узлами из искаженного акустического сигнала, вытекающего из указанного акустического сигнала, передаваемого между указанным узлом передатчика и указанным узлом приемника через указанный подводный акустический канал, и известной указанной оценки профиля скорости звука.
9. Способ по п. 8, в котором получение оценки профиля скорости звука осуществляют с использованием по меньшей мере одного способа из группы, включающей:
- обращение по меньшей мере к одной базе данных профилей скорости звука; и
- прямое измерение с использованием измерительного устройства и/или акустического способа.
10. Способ по п. 8, в котором оценка межузлового расстояния включает следующие стадии:
- получение времени пробега акустического сигнала от узла передатчика до узла приемника, глубины погружения узла передатчика, скорости звука на глубине погружения узла передатчика;
- определение межузлового расстояния, соответствующего пути по прямой линии между узлом передатчика и узлом приемника, как функции времени пробега и скорости звука на глубине погружения узла передатчика;
- и в котором указанный процесс инверсии инициирован с указанным расстоянием между узлами.
11. Способ по п. 1, в котором реализация способа осуществляется указанным узлом приемника или централизованной системой.
12. Постоянный машиночитаемый носитель, хранящий программу, которая при выполнении этой программы компьютером или процессором выполняет способ для оценки межузлового расстояния междоузлия между узлом передатчика и узлом приемника, принадлежащим сети, согласно пп. 1-11.
13. Устройство для оценки межузлового расстояния между узлом передатчика и узлом приемника, принадлежащим сети, включающей множество узлов, расположенных вдоль буксируемых акустических линейных антенн, выполнено с возможностью передачи акустического сигнала от узла передатчика до узла приемника через подводный акустический канал, а также средства для оценки расстояния между узлами как функции оценки профиля скорости звука, зависящего от глубины погружения по подводному акустическому каналу, выполненное с возможностью осуществления способа по пп. 1-11.
| СПОСОБ ДЕКОРИРОВАНИЯ СИЛИКАТОБЕТОННОЙ ПАНЕЛИ | 2010 |
|
RU2443562C1 |
| US2005058022 A1, 17.03.0205 | |||
| US2007091719 A1, 26.04.2007 | |||
| US4992990 A, 12.02.1991 | |||
| А.М | |||
| Тюрин, А.П | |||
| Сташкевич, Э.С | |||
| Таранов | |||
| Основы гидроакустики | |||
| "Судостроение", Ленинград, 1966, стр.138-146. | |||

