1. ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретения относится к сбору геофизических данных. Изобретение охватывает оборудование, требуемое для изучения морского дна и свойств его осадочных слоев.
Более конкретно, изобретение относится к способу управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн.
В частности, изобретение может быть применено к области разведки нефтяных месторождений, используя сейсмический способ (морская нефтеразведка), но может также представлять интерес для любой другой области, где требуется система, выполняющая сбор геофизических данных в морской среде.
2. ИЗВЕСТНЫЕ ТЕХНОЛОГИИ
Ниже в этом документе описываются проблемы, возникающие при сборе сейсмических данных для промышленной нефтеразведки. Конечно, изобретение не ограничено этой конкретной областью применения, но также представляет интерес для любой методики, связанной с аналогичными или подобными проблемами и задачами.
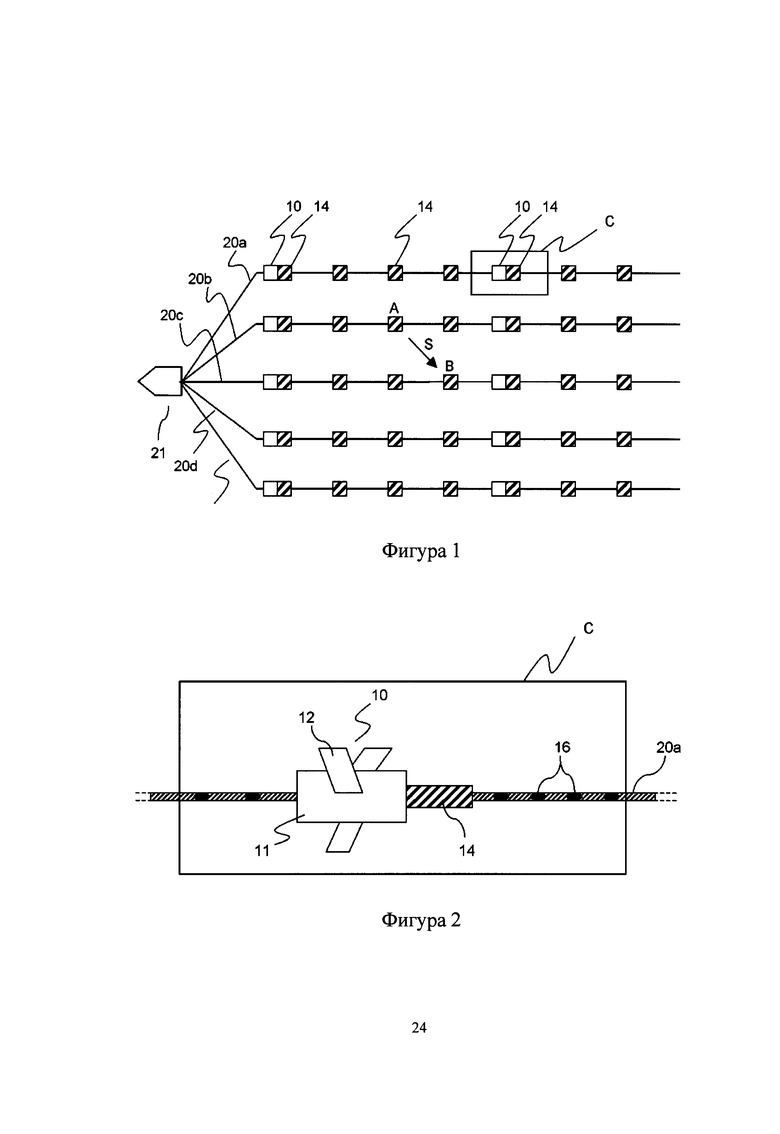
В операции сбора сейсмических данных на месте сейсмической разведки традиционно используют сети датчики (ниже называемые "гидрофонами" для сбора данных в морской среде). Гидрофоны распределяются вдоль кабелей и формируют линейные акустические антенны, обычно называемые "стримерами" или "сейсмическими стримерами". Как показано на фигуре 1, сеть сейсмических стримеров 20а-20е буксируется сейсмическим судном 21. Гидрофоны обозначены позицией 16 на фигуре 2, которая подробно иллюстрирует блок С фигуры 1 (то есть часть стримера, которая обозначена позицией 20а).
Сейсмический способ основан на анализе отраженных сейсмических волн. Таким образом, чтобы собрать геофизические данные в морской среде, активируется один или несколько затопленных сейсмических источников, распространяющих всенаправленные пачки сейсмических волн. Волна давления, формируемая сейсмическим источником, проходит через столб воды и облучает ультразвуком различные уровни морского дна. Часть сейсмических волн (т.е. акустические сигналы) отражаются и обнаруживаются гидрофонами, распределенными по длине сейсмических стримеров. Эти акустические сигналы обрабатываются и ретранслируются телеметрией от сейсмических стримеров до станции оператора, расположенной на сейсмическом судне, где выполняется обработка необработанных данных.
Известная проблема в этом контексте состоит в локализации сейсмических стримеров. Действительно, важно точно определить местоположение стримеров, в частности, для:
- контроля положения гидрофонов (распределенных вдоль сейсмических стримеров), чтобы получить удовлетворительную точность изображения морского дна в зоне разведки;
- обнаружение перемещений стримеров относительно друг друга (стримеры часто подвергаются различному естественному внешнему воздействию переменной величины, такому как ветер, волны, течения); и
- контроль навигации стримеров, в частности, в ситуации обхода препятствия (например, танкера).
Практически, задача нацелена на выполнение анализа морского дна с минимальным числом проходов судна через интересующую исследователей область. С этой целью, число стримеров, установленных в акустической сети, как правило, является достаточно большим. Таким образом, вышеуказанная задача локализации стримеров, в основном, зависит от длины стримеров, которая, например, может изменяться от 6 до 15 километров.
Управление положением стримеров состоит в использовании управляющих навигационных устройств, обычно называемых "птицами" (белые квадраты, обозначенные позицией 10 на фигуре 1). Они устанавливаются равномерно (например, через каждые 300 метров) вдоль сейсмических стримеров. Функция этих «птиц» состоит в поддержании определенного интервала между стримерами. Иными словами, птицы используются для управления глубиной погружения и боковым положением стримеров. С этой целью, и как показано на фигуре 2, каждая птица 10 имеет тело 11, оборудованное вращающимися крыльями 12 с механическим приводом (или в более общем смысле средствами механического перемещения), позволяющими изменить положение стримеров относительно друг друга (это называется управлением по горизонтали) и управлению стримерами по погружению (это называется управлением по вертикали).
Чтобы выполнить локализацию сейсмических стримеров (позволяющую точное горизонтальное управление стримерами с помощью птиц), вдоль стримеров распределены акустические узлы. Эти акустические узлы представлены заштрихованными квадратами, обозначенные позицией 14 на фигурах 1 и 2. Как показано на фигуре 1, одни акустические узлы 14 сети связаны с птицей 10 (как показано на фигуре 2), а другие с ней не связаны.
В акустических узлах 14 используются подводные акустические средства связи, в дальнейшем именуемые электроакустическими преобразователями, позволяющими оценивать расстояния между акустическими узлами (ниже называемые "межузловыми расстояниями"). Более конкретно, эти преобразователи представляют собой передатчики и приемники акустических сигналов, которые могут использоваться для оценки расстояния между узлами, разделяющим два акустических узла (действующие как узел передатчика и как узел приемника соответственно), расположенные на двух различных стримерах (которые могут быть смежными или несмежными), в зависимости от прохождения акустическим сигналом расстояния, измеряемого между этими двумя узлами (т.е. время прохождения акустического сигнала от узла передатчика до узла приемника). Таким образом, в акустической сети это формирует ячейки между узлами, позволяя знать точное горизонтальное расположение всех стримеров.
Здесь преобразователь означает либо единственное электроакустическое устройство, состоящее из приемопередатчика (излучатель/приемник) акустических сигналов, либо комбинацию передающего устройства (например, гидролокатор) и приемного устройства (например, датчик давления (гидрофон) или датчик движения (акселерометр, геофон и т.д.).
Как правило, каждый акустический узел включает электроакустический преобразователь, который используется как узел передатчика и узел приемника (для передачи и приема, акустических сигналов, соответственно). В альтернативном воплощении первый набор узлов действует только как узел передатчика, и второй набор узлов действует только как узел приемника. Третий набор узлов (каждый из которых действует поочередно как узел передатчика и узел приемника) также может использоваться в комбинации с первыми и вторыми наборами узлов.
Расстояние dAB между двумя узлами А и В, как правило, может оцениваться на основе следующей формулы: dAB=с*tAB, где:
- узел А действует как узел передатчика, который передает акустический сигнал С на узел В, действующий как узел приемника (см. пример на фигуре 1, где акустический сигнал С показан стрелкой между узлами, обозначенными как А и В);
- tAB обозначает продолжительность распространения (время пробега) между моментом передачи и моментом приема акустического сигнала, переданного от узла передатчика на узел приемника В (предполагая, что узел приемника и узел передатчика синхронизированы); и
- с обозначает "измеренное" или "предполагаемое" значение скорости звука акустического сигнала.
Вычисление межузлового расстояния может быть выполнено любой навигационной системой (для размещения набора гидрофонов), или системой управления узлами (для предоставления полезной информации птицам для управления по горизонтали), или непосредственно акустическими узлами (в случае, если они оборудованы электроникой, предназначенной для этого вычисления). Акустические узлы дополнительно синхронизируются системой управления узлами через шину проводной связи, размещенной в стримерах.
В известных способах сеть акустических узлов задана предопределенным расположением (также называемым геометрией сети узлов), которое определяется самостоятельно, например, предопределенными горизонтальными расстояниями между акустическими узлами и предопределенной глубиной погружения каждого акустического узла (иными словами, предопределенное расположение представляет собой предопределенную сетку акустических узлов, каждый из которых занимает предопределенное положение вдоль одного из стримеров и каждый расположен на предопределенной глубине погружения). Ожидаемые акустические характеристики сети акустических узлов не рассматриваются, и глобальная стратегия (с точки зрения уровней излучаемых сигналов, средств обработки сигналов, стратегии возбуждения узлов в сети) не принимает во внимание свойства среды (которые влияют на пропускную способность акустические канала).
Основной недостаток этих известных способов заключается в том, что свойства среды (также называемые условиями окружающей среды) не принимаются во внимание при определении акустической производительности сети (например, чтобы предсказать снижение реальной акустической производительности сети по сравнению с ожидаемыми акустическими характеристиками), как без учета сейсмической разведки (т.е. при подготовке к ней), так и во время сейсмической разведки. Кроме того, ничего не предложено с точки зрения изменения схемы расположения узлов (перед разведкой) и никакой корректировки параметров сети узлов (во время разведки), если не получены ожидаемые акустические характеристики (характеристики, не отражающие свойства канала).
К сожалению, практически ожидаемые акустические характеристики едва ли могут быть получены, потому что условия окружающей среды (профиль скорости звука, батиметрия и природа грунтовых слоев) в области, где выполняется сейсмическая разведка, могут изменить акустические пути звука.
В частности, в известных способах скорость звука предполагается постоянной в вертикальной плоскости. Однако практически имеет место другое явление. Скорость звука в океане в значительной степени зависит от температуры, давления и минерализации воды и, таким образом, почти всегда зависит от глубины (z), на которой проводится разведка, в этом случае мы говорим о профиле скорости звука (SSP).
В зависимости от формы профиля скорости звука (SSP) в области, где выполняется сейсмическая разведка, звук не будет обязательно следовать по прямой линии (как предполагается в описанном выше способе оценки расстояния), но образуется кривая траектория луча из-за явлений преломления (согласно закону Декарта-Шелла). Действительно, в неравномерной среде звуковые лучи могут преломляться) из-за изменения скорости звука и, более точно, из-за градиента скорости звука. Фронты звуковой волны преломляются к уровню, где скорость звука ниже, и преломление будет более выраженным, если изменение скорости звука происходит быстро.
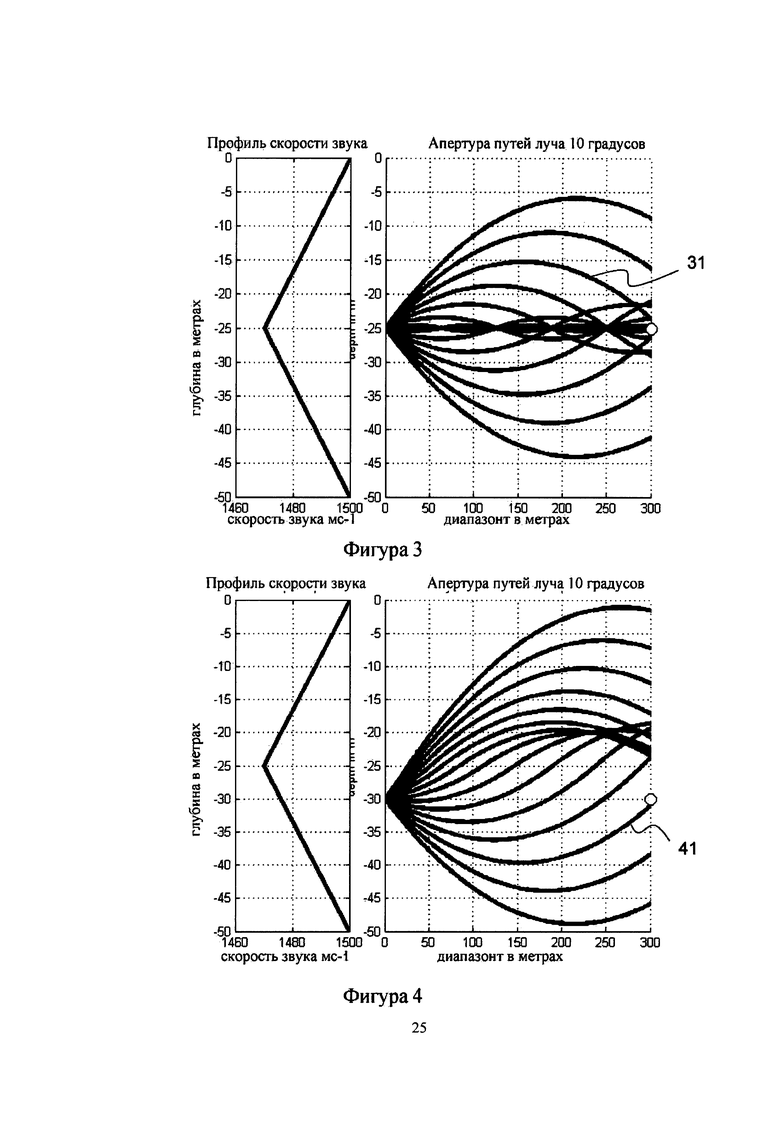
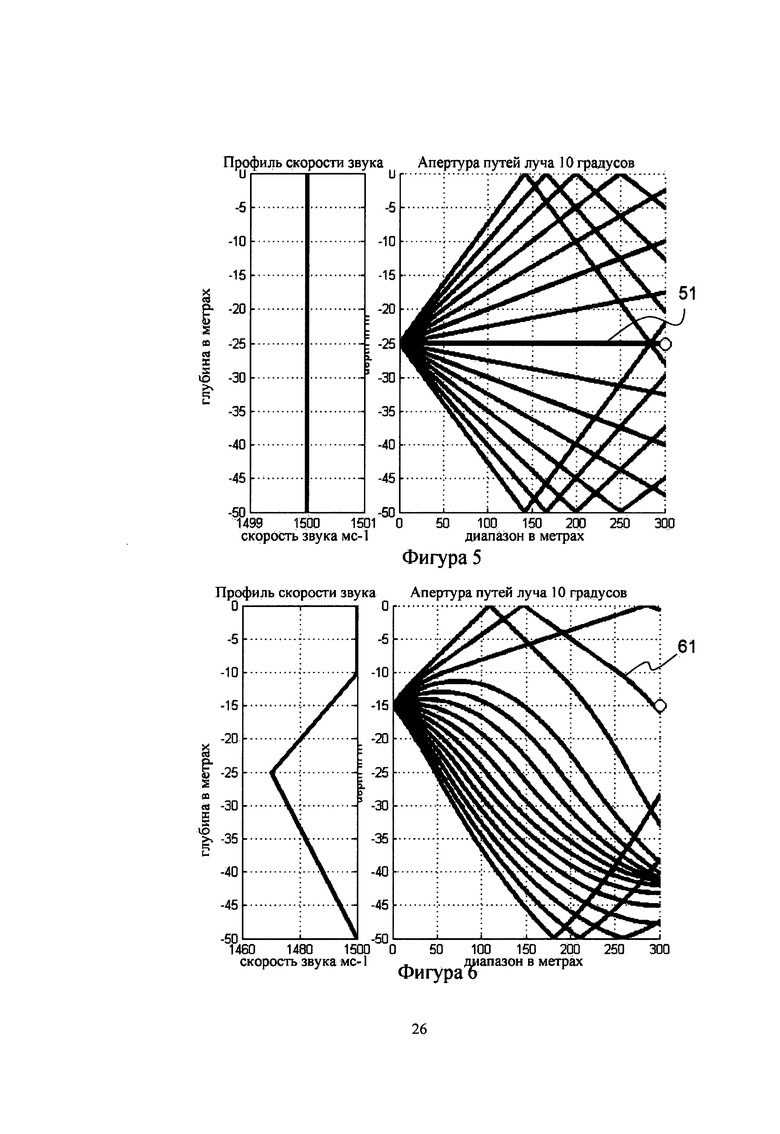
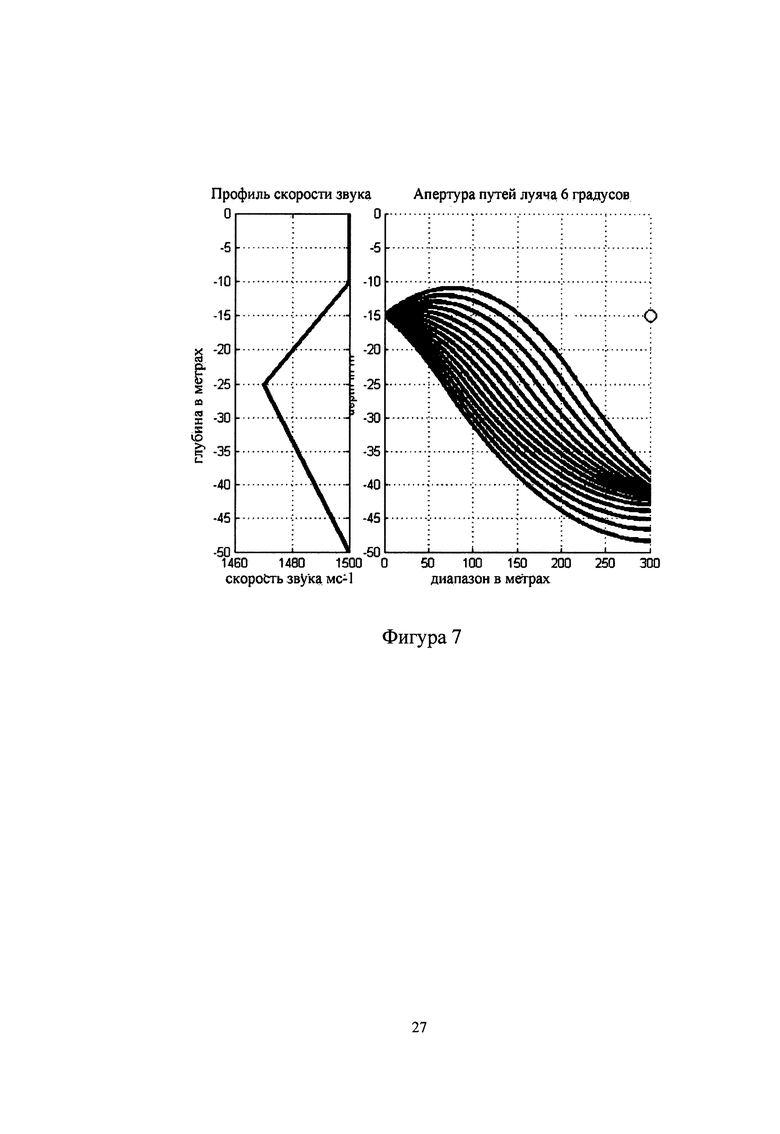
Фигуры 3-7 иллюстрируют эффекты градиента скорости звука в канале. На каждой из этих фигур левая часть представляет профиль скорости звука, а правая часть представляет соответствующие пути луча, полученные способом трассировки пути луча для апертуры возбуждения 10° и расстояния 300 метров, (фигуры 3-6) или с апертурой возбуждения 6° (фигура 7). Эти фигуры позволяют сравнить пути луча, сопровождаемые звуком в трех средах. Как можно видеть в левой части этих фигур, первая среда (фигура 5) является столбом воды глубиной 50 м с постоянной скоростью звука, а вторая среда (фигуры 3 и 4) является средой, состоящей из водного столба с минимальной толщиной 25 метров с постоянным градиентом скорости звука, и третья среда (фигуры 6 и 7) является средой, состоящей из водяного столба глубиной 50 метров и смешанного слоя толщиной 10 метров (постоянная скорость звука) с минимальной глубиной 25 метров и скоростью звука с постоянным градиентом.
Как можно видеть в правой части этих фигур глубина источника (узла передатчика), равная 25 метрам на фигурах 3 и 5, 30 метрам на фигуре 4 и 15 метрам на фигурах 6 и 7.
Звук будет следовать прямыми путями в первой среде (фигура 5), и по сильно изогнутой траектории во второй и третьей средах, в зависимости от глубины (фигуры 3, 4, 6 и 7). Мы можем видеть, что на фигурах 3 и 4 имеется прямой путь, если узел приемника имеет глубину 30 метров между узлом передатчика и узлом приемника. Напротив, на фигуре 6, если узел приемника имеет глубину 15 метров, нет никакого прямого пути, но только отраженный от поверхности путь между узлом передатчика и узлом приемника. На фигуре 7, если узел приемника имеет глубину 15 метров, вообще нет никакого пути между узлом передатчика и узлом приемника (при апертуре возбуждения 6°).
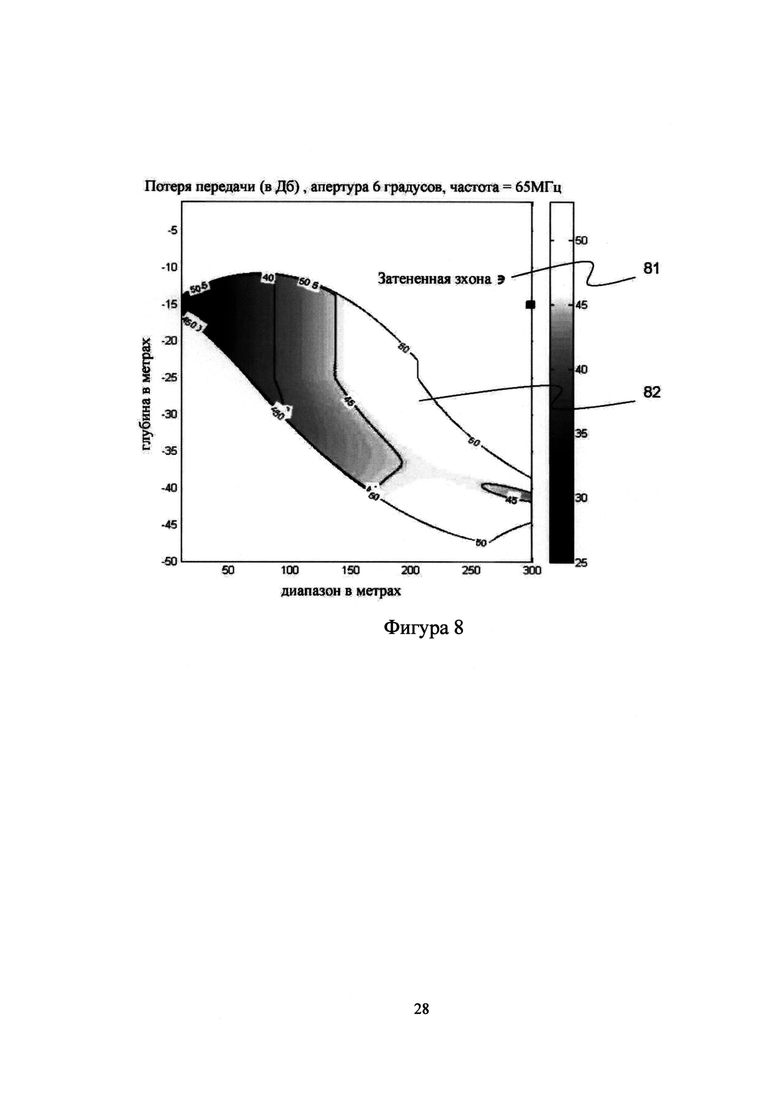
На фигуре 8 представлен пример потери передачи по каналу фигуры 7. Более точно в правой части фигуры 8 показаны отличительные коды (используемые на левой стороне фигуры 8), связанные с различными величинами потери передачи (в децибелах). В левой части фигуры 8 представлена вычисленная величина потери передачи для каждой точки, соответствующей месту приема, определяемому глубиной и горизонтальным расстоянием от узла передатчика. На левой стороне фигуры 8 показаны две основные зоны: зона тени 81, включающая точки, где нет никакого пути между узлом передатчика и этой точкой (белая зона на фигуре), и зону приема, включающую точки для обозначения пути между узлом передатчика и этой точкой (полутоновая часть на фигуре).
Как отмечено выше, ожидаемые акустические характеристики сети акустических узлов едва ли могут быть получены, поскольку акустические пути звука изменяются (преломляются) в зависимости от профиля скорости звука (который является одним из свойств среды области, где выполняется сейсмическая разведка). Действительно, реальные акустические характеристики могут отличаться от ожидаемых, потому что между узлом передатчика и узлом приемника (расположенных согласно предопределенной схеме) нет никакого прямого пути, но имеются криволинейные пути (см. фигуры 3 и 4), пути отраженных лучей (см. фигуру 6), или вообще нет никаких путей (см. фигуру 7). Кроме того, если эти два узла А и В, рассматриваются не на одной и той же глубине, путь луча от узла А к узлу В и тот же путь от узла В к узлу А может отличаться и, таким образом, время пробега может изменяться в зависимости от пути сигнала.
Когда путь является криволинейным, расстояние вдоль этого пути будет более важным, чем в случае прямой линии. Таким образом, межузловое расстояние, полученное по классической формуле (dAB=c*tAB) с учетом постоянного профиля скорости звука, будет переоценено, что является синонимом недостаточной точности локализации или сдвига в результате локализации (локализация стримеров на основе расстояний между узлами, полученными с множества пар акустических узлов).
Когда путь является отраженным, если он не идентифицируется как таковой, то расстояние между узлами потенциально будет завышено. Кроме того, отраженные пути (особенно в случае нижнего отражения) часто ослабляются, уменьшая, таким образом, отношение сигнал/шум в узле приемника, и могут влиять на корреляцию между полученным сигналом и переданным сигналом.
В теплом океане типичный профиль скорости звука имеет три части, соответствующие трем слоям водного столба: поверхностный слой (смешанный уровень), основной термоклин и глубокий изотермический слой. Смешанный слой может быть толщиной в несколько метров, но может также расширяться на несколько десятков метром (в зависимости от сезона, солнца, волнения моря, течения и т.д.). Смешанный слой может исчезнуть в более холодных водах. Для смешанного слоя скорость звука является почти постоянной, но это не относится к основному термоклину и глубокому изотермическому слою. Тенденция в области сбора сейсмических данных состоит в том, чтобы увеличить глубину погружения стримера, позволяя разместить стример (и акустические узлы) под смешанным слоем (и поэтому, в основном, под термоклином) и, таким образом, усилить явления преломления.
Реальные акустические характеристики сети акустических узлов не всегда соответствуют ожидаемым также потому, что, в зависимости от батиметрии, пути отражений от дна океана могут достичь узла приемника с более или менее значительной разницей во времени, и величина нижнего отраженного пути будет непосредственно зависеть от типа дна (песок, ил, камни) и от толщины осадочных пород в месте проведения сейсмической разведки.
Кроме того, на мелководье нижний отраженный луч (эхо) может быть очень мощным (в зависимости от свойств донных отложений) и иметь малую разницу во времени с путем прохождения прямого луча. Это может мешать обнаружению объекта и искажать данные прямого пути.
3. ОБЪЕКТЫ ИЗОБРЕТЕНИЯ
Изобретение, по меньшей мере, в одном варианте воплощения, в частности, нацелено на преодоление указанных недостатков предшествующей технологии.
Более конкретно, объектом, по меньшей мере, одного варианта воплощения изобретения является обеспечение способа управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн.
По меньшей мере, еще одним объектом одного варианта воплощения изобретения является создание способа такого типа, который позволяет оптимизировать акустические характеристики сети акустических узлов, до и/или во время сейсмической разведки.
Дополнительным объектом, по меньшей мере, одного варианта воплощения изобретения является обеспечить способ такого типа, который прост в реализации и экономически выгоден.
4. КРАТКОЕ СОДЕРЖАНИЕ ИЗОБРЕТЕНИЯ
В конкретном воплощении изобретения предлагается способ управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн, причем сети акустических узлов настроены на определение межузловых расстояний, позволяя определить местоположение акустических линейных антенн, отличающийся тем, что способ содержит следующие стадии:
- определение расположения сети акустических узлов;
- получение, по меньшей мере, одного свойства морской среды, относящегося к области выполнения разведки с сетью акустических узлов;
- определение акустических характеристик сети акустических узлов, используя модель распространения звука для определения, по меньшей мере, одного свойства морской среды и для определения схемы расположения.
Это конкретное воплощение является совершенно новым и изобретательским решением, потому что оно учитывает свойства среды (в области выполнения разведки), чтобы управлять акустическими характеристиками сети акустических узлов.
Согласно одному конкретному признаку, заданная схема расположения определяется, по меньшей мере, определенными горизонтальными расстояниями между акустическими узлами и определенной глубиной погружения каждого акустического узла.
Схема расположения может также быть определена дополнительными параметрами.
Согласно конкретному признаку, шаг определения количества акустических характеристик, по меньшей мере, для одной данной пары узлов, включающих узел передатчика и узел приемника, содержит следующие стадии:
- оценку свойств распространения акустического сигнала через:
подводный акустический канал между узлом передатчика и узлом приемника данной пары узлов, используя указанную модель распространения звука и знание:
- определение глубины погружения узла передатчика и узла
приемника и расстояние по горизонтали между узлом передатчика и узлом приемника, и
- определение, по меньшей мере, одного свойства морской среды,
включая, по меньшей мере, оценку профиля скорости звука подводного акустического канала;
- связь величины акустической характеристики с данной парой
узлов как функции, по меньшей мере, одного результата стадии оценки свойств распространения.
Как подробно описано ниже, значение акустической характеристики, например, "плохо" или "допустимо", является величиной ниже, выше или равной заданному порогу (предопределенной чувствительности).
Чем больше число пар узлов, характеристики которых определяются количественно, тем лучше определение акустических характеристик сети.
Согласно одному конкретному признаку, по меньшей мере, один результат стадии оценки свойств распространения принадлежит группе, содержащей:
- первую информацию, относящуюся, по меньшей мере, к одному
пути, существующим между узлом передатчика и узлом приемника данной пары узлов;
- вторую информацию, относящуюся, по меньшей мере, к одному пути, существующим между узлом передатчика и узлом приемника данной пары узлов; и
- третью информацию, относящуюся к корреляции уровня искажения многолучевого пути.
Можно использовать одно или все эти сведения, и другую нужную информацию.
Согласно одному конкретному признаку, по меньшей мере, одно свойство морской среды принадлежит группе, содержащей:
- профили скорости звука, в зависимости от глубины;
- батиметрические характеристики;
- свойства донных отложений.
Можно использовать одно или все эти свойства и другие характеристики.
Согласно еще одному конкретному признаку, стадия получения, по меньшей мере, одного свойства морской среды выполняется, используя, по меньшей мере, один способ, принадлежащий группе, содержащей:
- способы обращения, по меньшей мере, к одной базе данных;
- способы прямого измерения, используя измерительное устройство и/или акустический способ; и
- способы косвенного измерения, используя процесс инверсии.
Согласно одному конкретному признаку, способ включает стадию улучшения акустических характеристик сети акустических узлов как функции, по меньшей мере, одного результата стадии определения количества.
Таким образом, после определения количества можно приступить к соответствующим действиям, чтобы улучшить акустические характеристики сети акустических узлов.
Согласно одному конкретному признаку, на стадии улучшения акустических характеристик учитывается значение акустической характеристики, связанное, по меньшей мере, с одной заданной парой узлов.
В первом варианте воплощения стадия улучшения акустических характеристик сети акустических узлов включает стадию изменения заданной схемы расположения как функции, по меньшей мере, одного результата стадии определения количества.
В этом первом варианте воплощения мы предполагаем изменение заданной схемы расположения.
Согласно одному конкретному признаку в первом варианте воплощения способ выполняется перед проведением разведки.
Действительно, легче изменить схему расположения перед разведкой. Во втором варианте воплощения стадия улучшения акустических характеристик сети акустических узлов включает стадию корректировки, по меньшей мере, одного параметра сети акустических узлов без изменения заданной схемы расположения, как функции результата стадии определения количества.
Этот второй вариант воплощения является особенно подходящим, когда схема расположения не может быть изменена. Однако можно объединить первый и второй варианты воплощения, т.е. изменить схему расположения и скорректировать один или несколько других параметров сети акустических узлов.
Согласно одному конкретному признаку второго варианта воплощения, по меньшей мере, один параметр сети акустических узлов принадлежит группе, содержащей:
- уровни излучения акустических сигналов, передаваемых акустическими узлами;
- свойства акустических сигналов, передаваемых акустическими узлами;
- время и/или способы совместного использования частоты,
используемой акустическими узлами и оказывающей влияние на длительность акустического цикла;
- способы обработки сигналов, используемые акустическими узлами для обработки полученных акустических сигналов.
Можно использовать один, несколько или все эти свойства среды, или даже другие свойства.
Согласно одному конкретному признаку второго варианта воплощения, способ выполняется во время проведения разведки.
Действительно, трудно изменить схему расположения во время проведения разведки.
В другом варианте воплощения изобретение относится к программному коду, включенному в продукт компьютерной программы для реализации указанного способа (в любом из его различных вариантов воплощения), когда указанная программа выполняется на компьютере или процессоре.
В другом варианте воплощения изобретение относится к постоянному машиночитаемому носителю, хранящему программу, которая при ее выполнении компьютером или процессором, инициирует компьютер или процессор выполнить вышеупомянутый способ (в любом из его различных воплощений).
В еще одном варианте воплощения изобретение предлагает устройство для управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн, причем сети акустических узлов предназначены для определения межузловых расстояний, позволяя определить местоположение акустических линейных антенн. Устройство содержит:
- средства для получения определенной схемы расположения сети акустических узлов;
- средства для определения, по меньшей мере, одного свойства морской среды, относящиеся к области выполнения разведки с помощью сети акустических узлов;
- средства для определения количества акустических характеристик сети акустических узлов, используя модель распространения звука для определения, по меньшей мере, одного свойства морской среды и для определения схемы расположения узлов.
5. ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
Другие признаки и преимущества изобретения станут понятными из последующего описания, снабженного не исключающими примерами и ссылками на приложенные чертежи, на которых:
Фигура 1, уже описанная в связи с известным уровнем техники, представляет пример сети сейсмических стримеров, буксируемых сейсмическим судном;
Фигура 2, уже описанная в связи с известным уровнем техники, подробно иллюстрирует блок, обозначенный как С на фигуре 1 (т.е. часть стримера);
Фигуры 3-7, уже описанные в связи с известным уровнем техники, каждая представляет профиль скорости звука (левая часть фигуры) и соответствующие пути луча (правая часть фигуры);
Фигура 8, уже описанная в связи с известным уровнем техники, представляет пример потери передачи в канале фигуры 7;
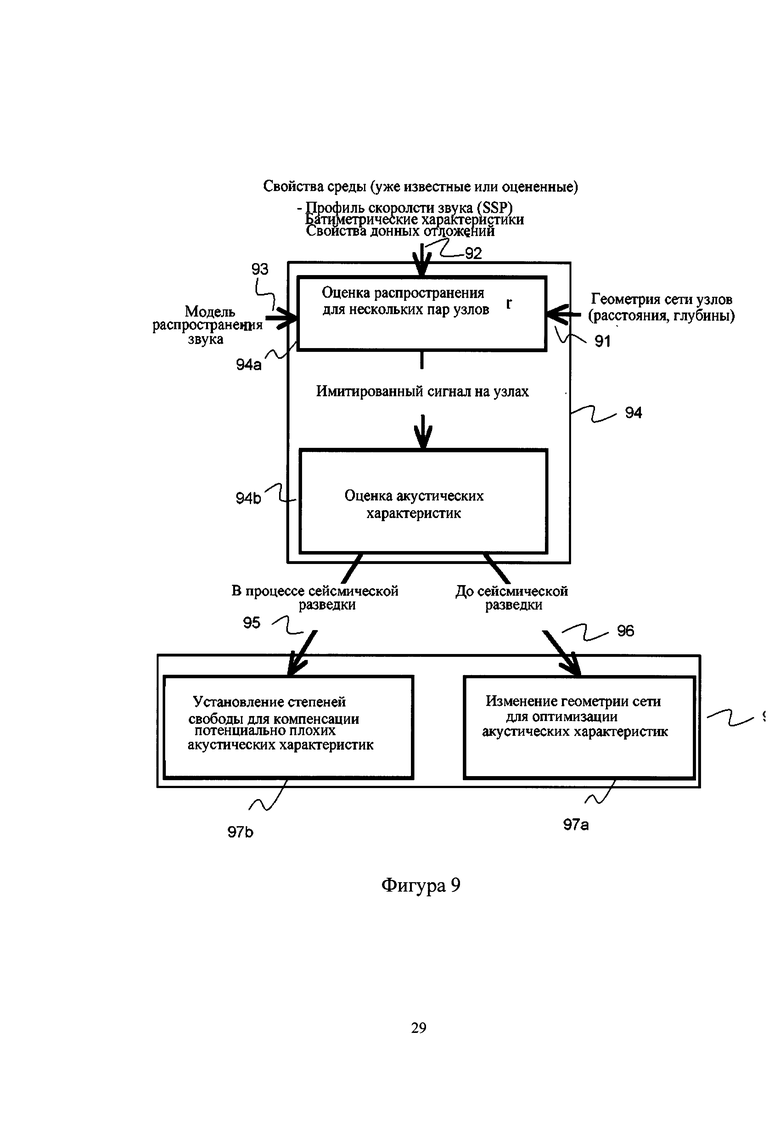
Фигура 9 - блок-схема конкретного варианта воплощения способа согласно изобретению;
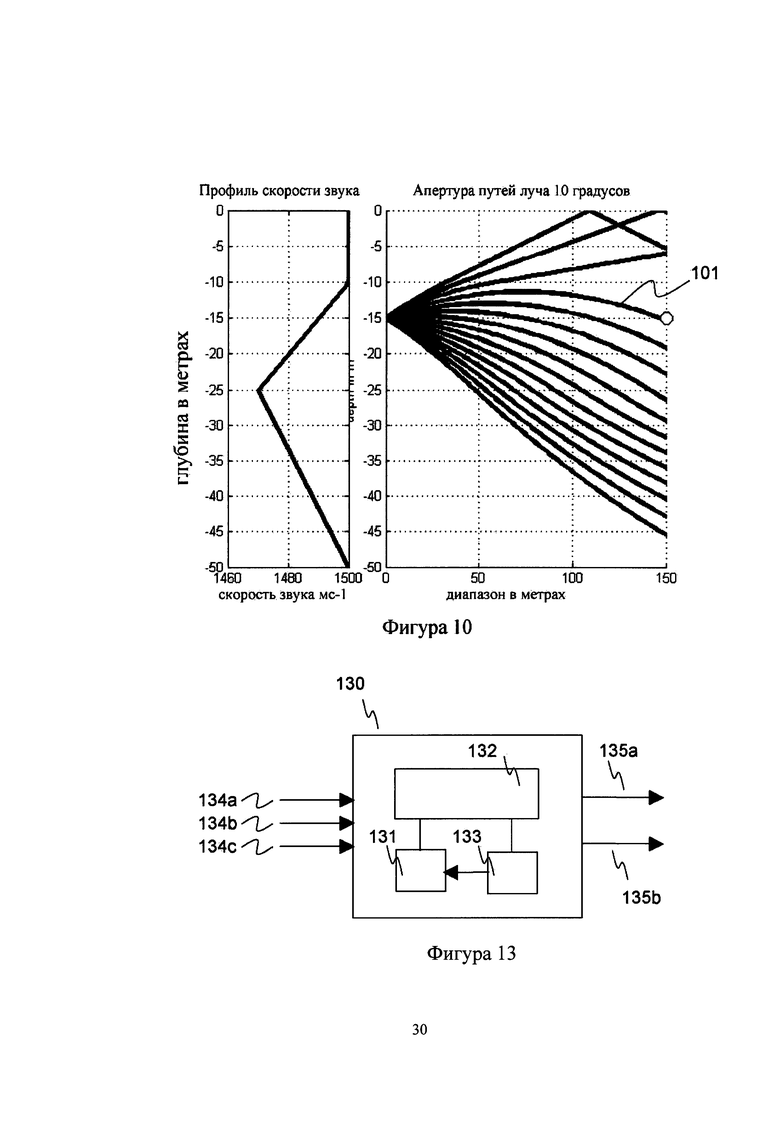
Фигура 10 представляет другой пример профиля скорости звука (левая часть фигуры) и соответствующие пути лучей (правая часть фигуры), которая отличается от фигуры 6 только тем, что расстояние в 300 метров изменено на расстояние в 150 метров;
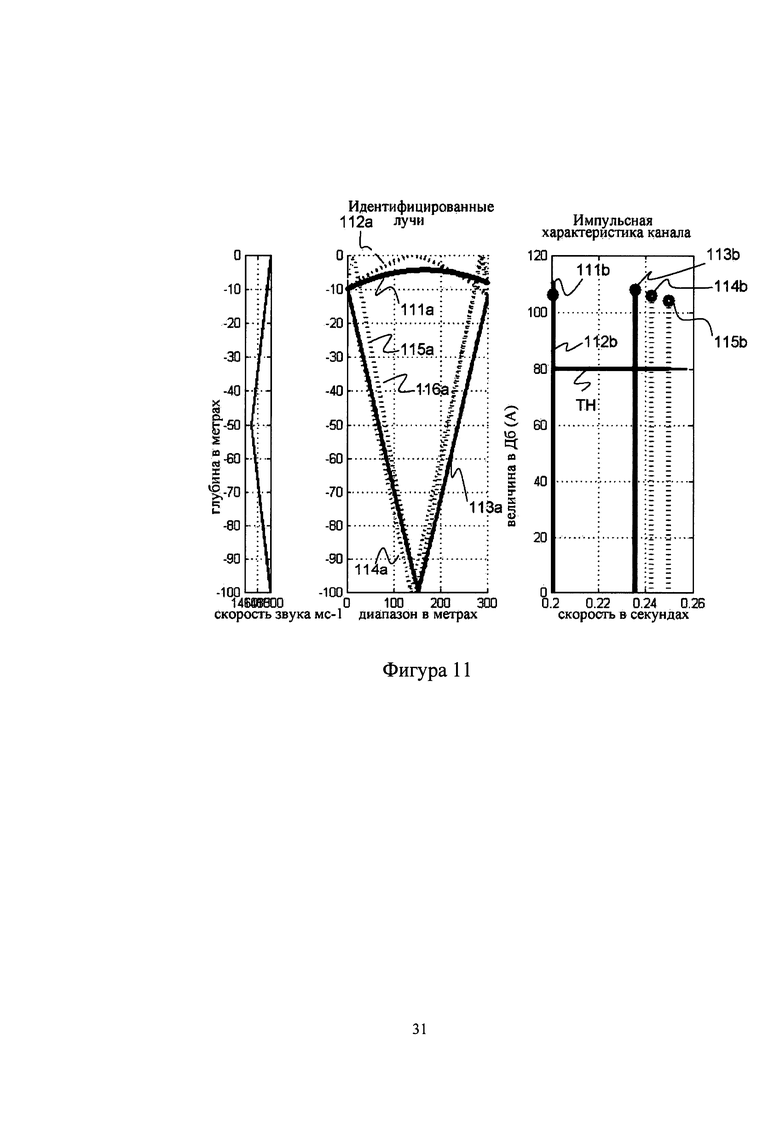
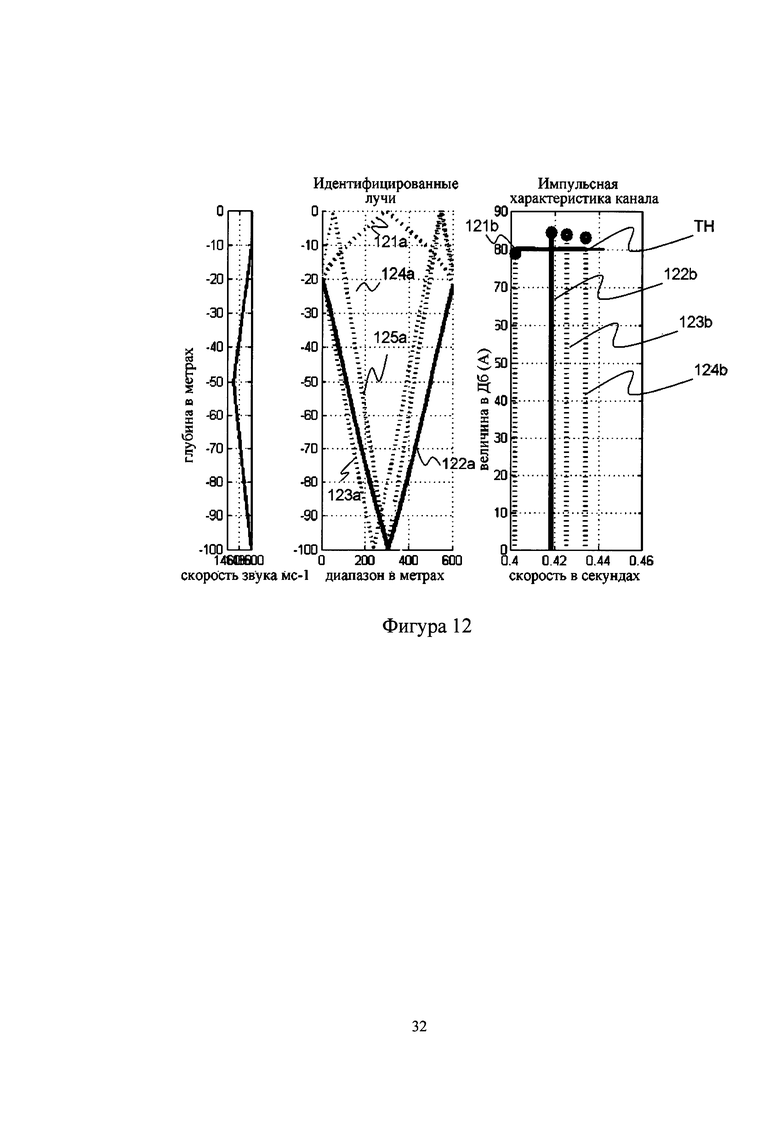
Фигуры 11 и 12 каждая представляет профиль скорости звука (левая часть фигуры), соответствующий пути луча (средняя часть фигуры) и соответствующую импульсную характеристику канала (правая часть фигуры);
Фигура 13 - упрощенная структура устройства управления согласно определяемому варианту воплощению изобретения.
6. ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигуры 1-7 уже описаны выше, как связанные с предшествующим уровнем техники.
В последующем описании рассматривается пример управления акустическими характеристиками сети акустических узлов 14, показанных на фигуре 1 и расположенных вдоль сейсмических стримеров 20а-20е.
Обратимся теперь к фигуре 9, на которой представлено конкретное воплощение способа управления согласно изобретению.
На стадии 91 мы получаем схему расположения сети узлов (также называемую геометрией сети узлов), определяемую, например, горизонтальными расстояниями между акустическими узлами и предопределенной глубиной погружения каждого акустического узла.
На стадии 92 мы получаем свойства морской среды (профили скорости звука, батиметрические характеристики, свойства донных слоев и т.д.) относящиеся к области выполнения разведки с помощью сети акустических узлов.
Как подробно описано ниже, способ управления согласно изобретению может быть реализован до проведения сейсмической разведка (т.е. при подготовке к ней) и/или во время сейсмической разведки.
В первом случае (т.е. перед разведкой), есть много способов получения свойства среды:
- для профиля скорости звука (SSP): предварительные знания
о среде (глобальные базы данных), прямое измерение (с помощью системы типа батитермограф (ХВТ (расходный батитермограф (ХВТ), расходный измеритель скорости звука (XSV) и т.д.); или
- использование способа косвенного измерения, используя процесс инверсии;
- для батиметрии (батиметрических характеристик):
гидролокатор бокового обзора, однолучевой эхолот, многолучевой эхолот;
- для свойств донных отложений: эхолот донных отложений или сейсмическая система сбора данных.
Во втором случае (т.е. во время разведки), также имеется несколько способов получения свойства среды:
- для профиля скорости звука (SSP): прямое точное измерение (используя систему, такую как батитермограф (ХВТ (расходный батитермограф), прибор для измерения CTD (глубины, температуры и электропроводимости воды) и т.д.) или прямое непрерывное измерение (по важным пространственным и временным слоям) (используя измеритель профиля скорости звука, который непрерывно перемещается в водной среде по синусоиде или выполняя свободное падение (например, перемещающийся измеритель профиля MVP);
- для батиметрии (батиметрических характеристик):
непрерывное измерение глубины воды эхолотом, гидролокатором бокового обзора, многолучевым эхолотом и т.д.;
- для донных отложений свойств: непрерывное исследование с профилометром дна, эхолотом отложений или системой сбора сейсмических данных.
На стадии 93 мы получаем модель распространения звука, например, модель теории луча (соответствующий способ называют "способом трассировки пути луча"). Могут использоваться и другие модели распространения звука, чтобы оценить сигнал, принятый в узле приемника, в частности, параболическое уравнение, интеграция по волновым числам или нормальные режимы (выбор зависит от рассматриваемой частоты, глубина воды, зависимости от диапазона).
На стадии 94 мы определяем количество акустических характеристик сети узлов, используя результаты стадий 91, 92 и 93. Точнее, в конкретном варианте воплощения фигуры 9 стадия 94 состоит из двух стадий 94а и 94b.
На стадии 94а для каждой из множества пар узлов (узел передатчика и узел приемника) мы оцениваем свойства распространения акустического сигнала через подводный акустический канал между узлом передатчика и узлом приемника. Стадия 94а выполняется, используя модель распространения звука (полученную на стадии 93), свойства среды (полученные на стадии 92) и определяем местоположение (используя результаты стадии 91). Результатом стадии 94а является полученный моделированный сигнал для каждого рассматриваемого узла приемника. Этот моделированный сигнал определяется, например, следующим образом:
- первой порцией информации, относящейся, по меньшей мере,
одному пути, существующим между узлом передатчика и узлом приемника. Имеются различные виды путей, например: путь по прямой линии (позиция 51 на фигуре 5, описанной выше), отраженный путь (позиция 51 на фигуре 6, описанной выше), путь по линии преломления (позиция 31 на фигурах 3, 41 и на фигуре 4, описанных выше), отсутствие какого-либо пути (см. фигуру 7, описанную выше);
- второй порцией информация, относящейся к величине, по
меньшей мере, одного пути, существующего между узлом передатчика и узлом приемника. Величина пути, например, дается потерей передачи, вычисленной для этого пути (см. фигуру 8, описанную выше), или импульсной характеристикой канала, вычисленной для этого пути (см. фигуры 11 и 12, описанные ниже); и
- третей порцией информации, относящейся к корреляции уровня искажений многолучевого пути (вычитается из импульсной характеристики канала).
На стадии 94b мы оцениваем акустические характеристики сети узлов и, более точно, акустические характеристики каждой из пар узлов, которые рассматриваются на стадии 94а, как функции первой, второй и третьей порций информации и, определяющих каждый полученный моделированный сигнал.
Например, в результате стадии 94b, мы связываем значение акустической характеристики с каждым рассматриваемым узлом из нескольких узлов, по меньшей мере, в зависимости от одного результата стадии оценки свойств распространения. Это значение акустической характеристики, например "хорошая" или "неудовлетворительная" (т.е. плохая акустическая характеристики) в зависимости от того, выполнен или нет следующий тест в рассматриваемой паре узлов: "имеет первый путь (прямолинейный или преломленный) величину больше пороговой величины".
На фигуре 11 показан случай, в котором вышеуказанный тест выполнен, а на фигуре 12 показан случай, в котором вышеуказанный тест не выполнен. На каждой из этих фигур представлен профиль скорости звука (левая часть фигуры), соответствующий пути луча (средняя часть фигуры), и соответствующая импульсная характеристика канала (правая часть фигуры).
Теперь рассмотрим фигуру 11 более подробно. Как показано в левой части фигуры 11, среда (канал) является столбом воды глубиной 100 метров, и профиль скорости звука с минимальной глубиной 50 метров с постоянным градиентом. Мы предполагаем песчаное дно. Средняя часть фигуры 11 представляет соответствующие пути луча, полученные способом трассировки пути луча для апертуры возбуждения 45°, расстояния 300 метров и глубины 10 метров для узла передатчика и узла приемника. Есть шесть путей луча: один прямой путь по линии преломления (позиция 111a) и пять отраженных путей (позиции 112а-116а). Правая часть фигуры 11 (импульсная характеристик канала) показывает величины (позиции 111b-115b) пяти этих первых путей (величины 111b и 112b наложены). Зная уровень излучения (например, 180 дБ относительно 1 µПа на метр, т.е. предполагая, что 1 дБ эквивалентен изменению давления 1 µПа в источнике излучения 1 м), направленность и чувствительность приемника, можно видеть, является ли величина (приемный слой) каждого пути больше определенного порога (также называемого чувствительностью системы), обозначенного ТН на фигуре 11 и предположительно равного 80 дБ(А). Вышеуказанный тест был выполнен в примере фигуры 11, поскольку первый путь (обозначенный позицией 111a) является величиной (позиция 111b) больше порога ТН.
Теперь рассмотрим фигуру 12 более подробно. Как показано в левой части фигуры 12, среда (канал) является столбом воды глубиной 100 метров, и профиль скорости звука глубиной 10 метров является смешанным слоем (постоянная скорость звука), и минимум глубины 50 метров для скорости звука с постоянным градиентом. Мы представляем донные отложения как толстый песчаный слой. Средняя часть фигуры 12 представляет соответствующие пути собственного луча, полученные способом трассировки пути луча для апертуры возбуждения 30°, расстояния 600 метров и глубины 20 метров для узла передатчика и узла приемника. Есть пять путей, которые проходят по пути отражения (позиции 121а-125а). В правой части фигуры 12 (импульсная характеристика канала) показаны величины (позиции 121b-124b) первых четырех этих путей. Знание уровня излучения (например, 180 дБ ссылка: 1 µПа 1 м), направленность и чувствительность приемника, можно видеть, является ли величина (принятый слой) каждого пути больше определенного порога (обозначенного как ТН и предположительно равный 80 дБ(А)). Вышеуказанный тест не выполнялся в примере фигуры 11, поскольку здесь нет никакого прямого пути (подобно прямому пути 111a на фигуре 11), и уровень пути 121а не имеет величины (позиция 121b) больше порога ТН. Таким образом, для сейсмической разведки конфигурация фигуры 11 является более привлекательной, чем конфигурация фигуры 12.
Теперь мы продолжим описание фигуры 9.
На стадии 97, мы улучшаем акустические характеристики сети узлов, используя выход со стадии 94b. Это может быть сделано до сейсмической разведки (т.е. при подготовке) (см. стрелку, обозначенную позицией 95) и/или во время проведения сейсмической разведки (см. стрелку обозначенную позицией 96).
Более точно, в конкретном варианте воплощения, показанном на фигуре 9, стадия 97 включает две стадии 97а и 97b, каждая из которых соответствует одной из двух вышеуказанных ситуаций ("перед разведкой" для стадии 97а и "во время разведки" для стадии 97b). На стадии 97а (т.е. перед разведкой), мы изменяем схему расположения (геометрию сети узлов), в зависимости от результатов стадии 94b (т.е. в зависимости от величины акустических характеристик, на стадии 94b, по отношению к рассматриваемой паре узлов). Стадия 97а позволяет определить оптимальное положение узлов (межузловые расстояния и глубины), т.е. измененную схему расположения, чтобы оптимизировать акустические характеристики сети узлов.
Например, в случае фигуры 12, поскольку значение акустической характеристики является "неудовлетворительным" (т.е. плохая акустическая характеристики), потому что вышеуказанный тест не проведен, мы можем изменить расстояние между рассматриваемой парой узлов и/или глубину одного или обоих узлов.
Согласно еще одному примеру воплощения, в случае фигуры 6 (нет никакой прямого пути, есть только отраженный путь) или в случае
фигуры 7 (вообще нет никакого пути) при межузловом расстоянии 300 метров мы можем изменить это расстояние на 150 метров. Эта новая величина приведена, например, на фигуре 8, которая показывает, что в рассматриваемом контексте точка, соответствующая этому межузловому расстоянию 150 метров, не находится в зоне тени 81. На фигуре 10 показан результат этого изменения межузлового расстояния, с прямым преломленным путем 101 (правая часть фигуры 10) между узлом передатчика и узлом приемника, причем оба расположены на глубине 15 метров.
На стадии 97b (т.е. во время разведки) мы корректируем один или несколько параметров сети узлов (также называемых степенями свободы сети узлов), без изменения заданной схемы расположения, как функции результата стадии 94b (т.е. как функции величин акустических характеристик на стадии 94b, применительно к рассматриваемым парам узлов).
В одном конкретном варианте воплощения, используя непрерывные измерения свойств среды (на стадии 92), можно получить непрерывную оценку акустических характеристик сети узлов в реальном времени, и эта непрерывная оценка может использоваться, чтобы установить определенные степени свободы сети узлов.
Например, мы можем выполнить одно или несколько следующих действий, чтобы установить определенные степени свободы сети узлов:
- увеличить уровни излучения акустических сигналов,
излучаемых акустическими узлами (что оказывает положительный эффект по энергопотреблению и надежность системы и повышает срок службы оборудования согласно закону Аррениуса);
- изменить свойства акустических сигналов, излучаемых
акустическими узлами, чтобы увеличить выигрыш в отношении сигнал-помеха при обработке сигналов, выбирая, например, сигнал с большим произведением времени-ширины полосы (что уменьшает длительность акустического цикла и затраты энергии);
- изменить стратегию возбуждения узлов в сети, изменяя совместное использование времени или частоты (что благоприятно влияет на длительность акустического цикла);
- изменить способ обработки полученных сигналов (т.е.
изменить способы обработки сигналов, используемых акустическими узлами для обработки полученных акустических сигналов): увеличить выигрыш в отношении сигнал-помеха при обработке сигналов путем использования более мощных аппаратных средств обработки сигналов (в противоположность этому, сделать время процесса более важным, также как и длительность акустического цикла).
Обратимся теперь к фигуре 13, на которой представлена упрощенная структура устройства управления 123 (для управления акустическими характеристиками сети акустических узлов) согласно одному варианту воплощения изобретения.
Устройство управления 130 может быть системой управления узлами или навигационной системой. Устройство включает постоянную память (ROM) 133, оперативную память (RAM) 131 и процессор 132. Постоянная память 133 (постоянный машиночитаемый носитель) хранит исполняемые команды программного кода, которые выполняются процессором 132, реализуя способ изобретения (например, способ фигуры 9).
При инициировании устройства указанные команды программного кода передаются из постоянной памяти 133 в оперативную память 131 для их выполнения процессором 132. Аналогичным образом, оперативная память 131 включает регистры для хранения переменных и параметров, требуемых для этого выполнения. Процессор 132 получает следующую информацию (позиции 134а-134е соответственно);
- модель распространения звука;
- свойства среды, и
- заданную схему расположения.
По командам программного кода, процессор 132 выдает:
- измененную схему расположения 135а и/или
- скорректированные параметры 135b сети узлов (также
называемые скорректированными степенями свободы сети узлов).
Все стадии вышеуказанного способа оценки могут быть реализованы одинаково хорошо:
- выполнением команд программного кода, выполняемых перепрограммируемым вычислительным устройством, таким как персональный компьютер, DSP (цифровой сигнальный процессор) или микроконтроллер. Эти команды программного кода могут быть сохранены в постоянном машиночитаемом носителе, который может быть съемным (например, гибкий диск, CD-ROM или DVD-ROM), или несъемным устройством памяти; или
- специализируемым узлом или компонентом, таким как FPGA (вентильная матрица, программируемая пользователем), ASIC (специализированная интегральная схема) или любым другим специализированным аппаратным компонентом.
Предлагается способ управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн, причем сети акустических узлов настроены на определение межузловых расстояний, позволяя определить местоположение акустических линейных антенн. Способ содержит следующие стадии: получение (91) заданной схемы расположения сети акустических узлов; получение (92), по меньшей мере, одного свойства морской среды, относящегося к области выполнения разведки с помощью сети акустических узлов; и определение количества (94) акустическая характеристики сети акустических узлов, используя модель распространения звука, по меньшей мере, одного свойства морской среды и заданной схемы расположения. 3 н. и 12 з.п. ф-лы, 12 ил.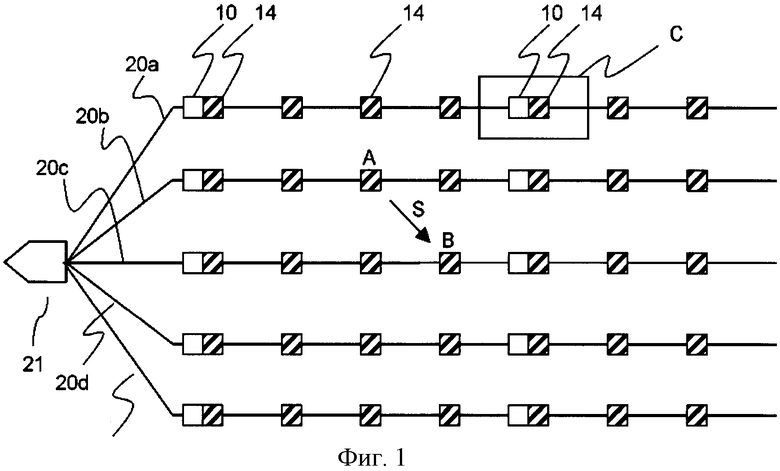
1. Способ улучшения акустических характеристик сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн, настроенная на определение межузловых расстояний, и с возможностью определения местоположения акустических линейных антенн, при этом указанный способ содержит следующие стадии:
- определение схемы расположения сети акустических узлов;
- получение, по меньшей мере, одного свойства морской среды, относящегося к области выполнения разведки с помощью сети акустических узлов;
- определение количества акустических характеристик сети акустических узлов, используя модель распространения звука для определения, по меньшей мере, одного свойства морской среды и схему расположения.
- улучшение акустических характеристик сети акустических узлов, как функции, по меньшей мере, одного результата стадии количественной оценки, при этом указанная стадия улучшения акустических характеристик сети акустических узлов содержит, по меньшей мере, одну из следующих стадий:
- модификацию заданной схемы расположения, как функции, по меньшей мере, одного результата стадии количественной оценки;
- корректировку, по меньшей мере, одного параметра сети акустических узлов без изменения заданной схемы расположения, как функции, по меньшей мере, одного результата стадии количественной оценки.
2. Способ по п. 1, в котором заданная схема расположения определяется, по меньшей мере, определением горизонтальных расстояний между акустическими узлами и глубиной погружения каждого акустического узла.
3. Способ по п. 1, в котором стадия определения количества акустических характеристик, по меньшей мере, для одной данной пары узлов, включающих узел передатчика и узел приемника, содержит следующие стадии:
- оценку свойств распространения акустического сигнала через подводный акустический канал между узлом передатчика и узлом приемника данной пары узлов, используя указанную модель распространения звука и знание:
 глубины погружения узла передатчика и узла приемника,
глубины погружения узла передатчика и узла приемника,
расстояние по горизонтали между узлом передатчика и узлом приемника, и
по меньшей мере, одно свойство морской среды, включая, по меньшей мере, оценку профиля скорости звука подводного акустического канала;
- связь величины акустической характеристики с данной парой узлов, как функции, по меньшей мере, одного результата стадии оценки свойств распространения.
4. Способ по п. 3, в котором, по меньшей мере, один результат стадии оценки свойств распространения относится к группе, содержащей:
- первую информацию, относящуюся, по меньшей мере, к одному пути, существующему между узлом передатчика и узлом приемника в данной паре узлов;
- вторую информацию, относящуюся, по меньшей мере, к величине одного пути, существующего между узлом передатчика и узлом приемника в данной паре узлов; и
- третью информацию, относящуюся к корреляции искажений многолучевого уровня.
5. Способ по п. 1, в котором, по меньшей мере, одно свойство морской среды относится к группе, содержащей:
- профили скорости звука, зависящие от глубины;
- батиметрические характеристики;
- свойства донных отложений.
6. Способ по п. 1, в котором стадия получения, по меньшей мере, одного свойства морской среды выполняется, используя, по меньшей мере, один способ, принадлежащий к группе, содержащей:
- способы обращения, по меньшей мере, к одной базе данных;
- способы прямого измерения, используя измерительное устройство и/или акустический способ; и
- способы косвенного измерения, используя процесс инверсии.
7. Способ по п. 3, который включает стадию улучшения акустических характеристик сети акустических узлов как функции, по меньшей мере, одного результата стадии определения количества.
8. Способ по п. 1, в котором стадия модификации заданной схемы расположения осуществляется до проведения разведки.
9. Способ по п. 1, в котором, по меньшей мере, один параметр сети акустических узлов принадлежит к группе, включающей:
- излучаемые уровни акустических сигналов, излучаемых акустическими узлами;
- свойства акустических сигналов, излучаемых акустическими узлами;
- способы совместного использования времени и/или частоты, реализуемые с помощью акустических узлов, которые оказывают влияние на длительность акустического цикла;
- способы обработки сигналов, реализованные с помощью акустических узлов для обработки принятых акустических сигналов.
10. Способ по п. 1, в котором стадия корректировки, по меньшей мере, одного параметра сети акустических узлов выполняется во время проведением разведки.
14. Постоянный машиночитаемый носитель, хранящий программу, которая при ее выполнении компьютером или процессором инициирует компьютер или процессор на выполнение способа улучшения акустических характеристик сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн по пп. 1-10.
15. Устройство для улучшения акустических характеристик сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн, причем сети акустических узлов настроены на определение межузловых расстояний, позволяя определить местоположение акустических линейных антенн; при этом указанное устройство включает:
- средство для получения заданной схемы расположения сети акустических узлов;
- средство для получения, по меньшей мере, одного свойства морской среды, относящегося к области выполнения разведки с помощью сети акустических узлов;
- средство для определения количества акустических характеристик сети акустических узлов, используя модель распространения звука для определения, по меньшей мере, одного свойства морской среды и для определения схемы расположения узлов;
- средство для улучшения акустических характеристик сети акустических узлов, как функции, по меньшей мере, одного результата стадии количественной оценки, причем указанное средство для улучшения акустических характеристик сети акустических узлов содержит, по меньшей мере, одно из следующих средств:
- средство для модификации заданной схемы расположения, как функции, по меньшей мере, одного результата стадии количественной оценки;
- средство для корректировки, по меньшей мере, одного параметра сети акустических узлов без изменения схемы расположения, как функции, по меньшей мере, одного результата стадии количественной оценки.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ДЕКОРИРОВАНИЯ СИЛИКАТОБЕТОННОЙ ПАНЕЛИ | 2010 |
|
RU2443562C1 |
| US2010002537 A1, 07.01.2010 | |||
| US4063213 A, 13.12.1977 | |||
| СПОСОБ ПОЛУЧЕНИЯ МОРОЖЕНОГО | 2012 |
|
RU2497370C1 |

