1. ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к области сбора геофизических данных. Более конкретно, изобретение относится к оборудованию для анализа геологических слоев под морским дном. В частности, изобретение относится к отрасли нефтеразведки, используя сейсмический способ, но может применяться в любой области, используя систему для получения геофизических данных в морской среде.
Более конкретно, изобретение относит к методике оценки скорости звука в воде в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн.
2. ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
В этом документе рассматриваются конкретные проблемы, существующие в области сбора сейсмических данных для целей нефтеразведки. Настоящее изобретение, конечно, не ограничено этой определенной областью применения, но представляет интерес для любой методики, которая должна справиться со связанными с ней вопросами или проблемами.
В операции сбора сейсмических данных в полевых условиях традиционно используют сети сейсмических датчиков, таких как акселерометры, геофоны или гидрофоны. В контексте сбора сейсмических данных в морской среде эти датчики распределены вдоль кабелей и формируют линейные акустические антенны, обычно называемые "стримерами" или "сейсмоприемными стримерами". Сеть сейсмоприемных стримеров буксируется судном, предназначенным для сейсморазведки.
Сейсмический способ основан на анализе отраженных сейсмоволн. Таким образом, чтобы собрать геофизические данные в морской среде, один или несколько погруженных в воду сейсмических источников активируются, чтобы распространить серию сейсмоволн. Ударная волна, формируемая сейсмическим источником, проходит через столб воды и облучает ультразвуком различные слои морского дна. Часть сейсмоволн (то есть акустических сигналов) отражается и обнаруживается датчиками (например, гидрофонами), распределенными по длине сейсмических стримеров. Эти акустические сигналы обрабатываются и ретранслируются телеметрическими устройствами от сейсмических стримеров до станции управления, расположенной на судне, где сигналы обрабатываются и сохраняются в памяти.
Связанная с этой операцией проблема заключается в расположении сейсмических стримеров. Действительно, важно точно определить местоположение стримеров, в особенности для:
- контроля позиции датчиков (гидрофонов), чтобы получить удовлетворительную точность изображения морского дна в зоне исследования; и
- обнаружения перемещений стримеров относительно друг друга (стримеры часто подвергаются различному внешнему воздействию переменной величины, такому как ветер, волны, течения) и
- контроля перемещения стримеров.
На практике это нацелено на выполнение анализа морского дна с минимальным числом проходов судна в исследуемой области. С этой целью число стримеров, реализованных в акустической сети, в основном, является избыточным. Эта проблема локализации стримеров, таким образом, особенно заметна из-за длины стримеров, которая может лежать в диапазоне от 6 до 15 километров.
Управление положением стримеров основано на применении управляющих навигационных устройств (обычно называемыми "сейсмоприемниками"), установленных равномерно (например, через каждые 300 метров) вдоль сейсмических стримеров.
Сейсмоприемники известного уровня техники используются только для контроля глубины погружения стримеров. Сегодня сейсмоприемники используются для управления глубиной погружения и боковым смещением стримеров.
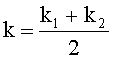
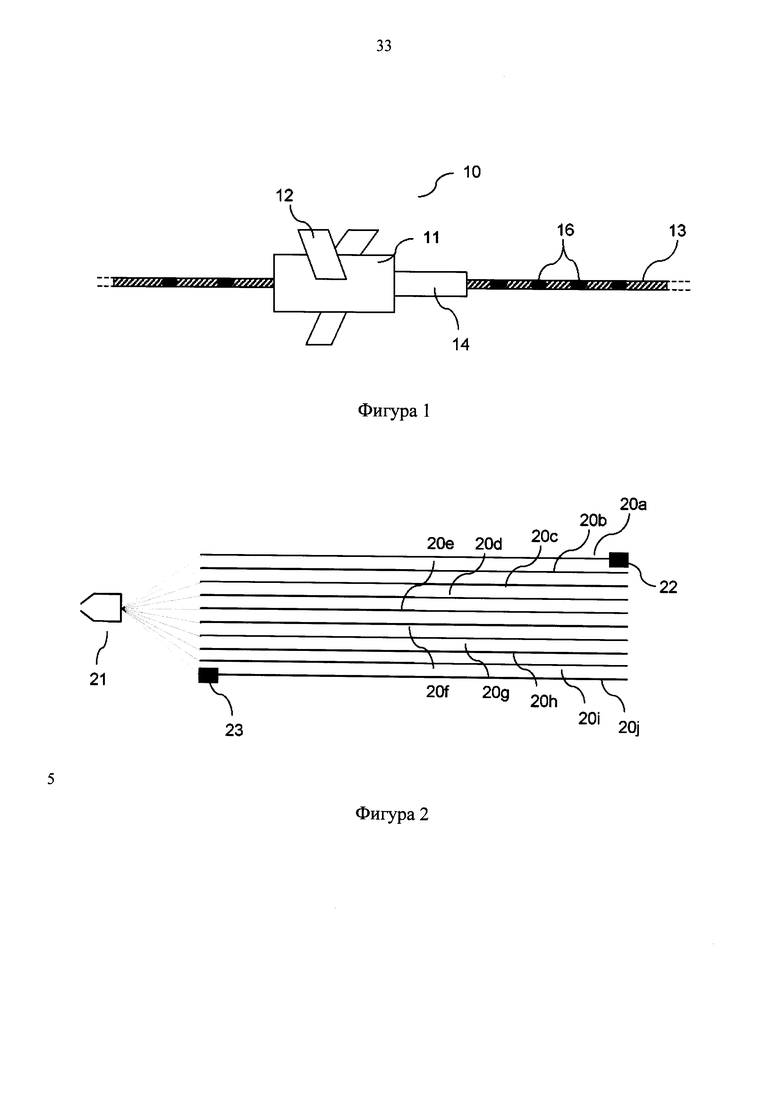
На фигуре 1 показана конфигурация части стримера 13, который содержит ряд датчиков (гидрофонов) 16, электроакустические преобразователи 14 (описанные ниже более подробно) и сейсмоприемники 10, распределенные по его длине.
Стример 13 в сборе содержит (по длине) множество частей, представленных на фигуре 1, включая большое число датчиков (гидрофонов) 16 и ряд электроакустических преобразователей 14.
Каждый сейсмоприемник 10 может быть связан с электроакустическим преобразователем 14 и содержит корпус 11, оборудованный по меньшей мере одним моторизованным поворотным крылом 12, позволяющим управлять боковым перемещением стримера 13 и управлять глубиной погружения стримера 13.
Управление сейсмоприемниками выполняется локально или системой управления, расположенной на борту судна.
Акустический узел известен как преобразователь 14 с соответствующей электроникой. Сейсмоприемник 10 может быть связан с акустическим узлом, чтобы позволить этому акустическому узлу непосредственно управлять связанным с ним стримером 13.
Для горизонтального движения электроакустические преобразователи 14 позволяют оценивать расстояния между акустическими узлами (называемые здесь также "межузловыми расстояниями"), размещенными вдоль двух различных стримеров 13, вблизи или на расстоянии друг от друга. Более конкретно, электроакустический преобразователь 14 первого стримера посылает несколько первых акустических последовательностей и также получает несколько вторых акустических последовательностей, прибывающих от второго электроакустического преобразователя 14 второго стримера, находящегося вблизи или на расстоянии от указанного первого стримера. Чтобы оценить межузловое расстояние, данные, полученные преобразователем 14 от акустического узла, затем обрабатываются локально электронным модулем (не показан на фигуре 1), связанным с преобразователем 14, или обрабатываются системой управления, расположенной на судне.
Преобразователи 14 являются передатчиками и приемниками акустических последовательностей (то есть акустических сигналов в виде модулируемых битов), используемых для определения расстояния между смежными узлами, расположенными на различных стримерах, формируя, таким образом, сетку межузловых расстояний, чтобы знать точное боковое расположение всех стримеров.
Здесь под преобразователем подразумевается либо одиночное электроакустическое устройство, состоящее из приемопередатчика (излучатель/приемник) акустических сигналов, или комбинация из передающего устройства (например, акустического повторителя сигналов) и приемного устройства приемника (например, гидрофона или акселерометра, геофона…).
Обычно, каждый узел содержит электроакустический преобразователь, позволяющий ему поочередно действовать как передающий узел и как приемный узел (для передачи и приема соответственно акустических сигналов). В альтернативном варианте воплощения первый набор узлов действует только как передающие узлы и второй набор узлов действует только как приемные узлы. Третий набор узлов (каждый из которых действует как передающий узел и приемные узлы) также может использоваться в комбинации с первым и вторым наборами узлов.
Расстояние между двумя синхронизируемыми узлами А и В обычно оценивается на основе следующей формулы:
dAB=k×tAB,
где
dAB - расстояние, разделяющее передающий узел А от приемного узла В акустического сигнала;
tAB - длительность распространения акустической последовательности между моментами излучения акустического сигнала передающим узлом (А) и приема сигнала узлом В;
k - «измеренная» или «оцененная» скорость звука.
Как уже было отмечено выше, данные сейсмоприемниками обрабатываются локально или системой управления, расположенной на борту судна.
В настоящее время широко известен способ измерения скорости распространения звука в воде (или просто звуковой скорости) акустических сигналов, переданных в акустической сети, с помощью измерителей скорости звука (скоростемеров). Фактически, измерения скорости звука, используемые в навигационной системе, как правило, выполняются с помощью двух измерителей скорости звука, каждый из которых размещен на двух различных концах сети стримеров, обеспечивая, таким образом, "измеренные величины" (также называемые "истинными значениями"). Например, на фигуре 2 показана сеть десяти стримеров от 20а до 20j, буксируемых судном 21, на котором расположена централизованная система (не показана), содержащая навигационную систему и систему управления. Два скоростемера 22, 23 расположены на двух концах стримера 20а и 20j набора стримеров, буксируемых судном, причем первый стример 22 расположен около судна, а второй стример 23 расположен на расстоянии от судна. Оценка скорости звука выполняется навигационной системой в каждой точке, соответствующей позиции акустического узла, наблюдением за историей реальных измерений скорости звука, обеспечиваемой скоростемерами с учетом скорости движения судна.
Недостаток этого известного способа заключается в том, что, если один из этих двух скоростемеров выходит из строя, необходимо извлечь стример (в котором находится этот скоростемер) из воды, чтобы заменить или восстановить дефектный скоростемер.
Другой недостаток этого известного способа заключается в том, что для оценки скорости распространения акустических сигналов навигационная система должна предполагать, что взвешенная величина скорости звука в данной фиксированной точке остается постоянной с течением времени (по оси стримеров). Однако из-за значительной длины стримеров и низкой скорости судна может пройти несколько часов между измерением скорости звука, выполненным в этой заданной точке, и проходом акустического узла через эту точку. Скорость акустической волны в воде вообще может быть параметром, который быстро изменяется, особенно вместе с температурой, давлением и соленостью воды. Таким образом, этот способ оценки обеспечивает величины скорости звука, которые не всегда надежны. На основе принципа, что средняя скорость распространения звука в морской воде равна 1500 м·с-1, изобретатели нашли, что ошибка в величине скорости, оцененной для каждого акустического узла, может часто достигать нескольких процентов, таким образом, вызывая ошибку в измерении длительности распространения и, следовательно, в измерении расстояния между узлами, которое может достигнуть тех же самых процентов. Из этого следует, что локальные датчики (гидрофоны), распределенные вдоль сейсмических стримеров, не обладают достаточной точностью.
Другой недостаток этого известного способа состоит в том, что скорость звука, измеренная скоростемером в данной точке, рассматривается как постоянная величина в поперечном плане к оси стримеров (измерения с перекрестием). Например, для сети из десяти стримеров, отделенных друг от друга на расстояние 100 метров, предполагается, что скорость звука является постоянной по ширине сети, то есть 1000 метров. Таким образом, аппроксимация скорости звука линейной или полиномиальной интерполяцией при измерении каждым скоростемером выполняется в поперечном плане к оси стримеров, что также делает ненадежными расчетные значения скорости звука.
Кроме того, независимо от навигационной системы сейсмоприемники, размещенные вдоль стримеров, содержат встроенную электронику, используемую для обеспечения местной обратной связи (чтобы управлять расстояниями между узлами акустической сети). Как отмечено выше, эти расстояния между узлами определены как функция длительности распространения переданных акустических сигналов, измеренных узлами сети, и расчетным значением скорости звука, или навигационной системой, или оператором через систему управления. Следовательно, ошибка в этом расчетном значении скорости звука может вызвать ошибку в обратной связи узлов между собой.
Другой известный способ оценки скорости звука сигнала состоит в измерении линейной длительности распространения между двумя узлами, размещенными в том же самом стримере, и от знания расстояния, разделяющего эти два узла, при выводе расчетного значения скорости звука. Однако линейное измерение длительности распространения требует структуры узла с электроакустическим преобразователем, отделенным от стримера (то есть размещенным вне узла). Следовательно, такой способ не может быть реализован в сети стримеров с преобразователями, встроенными в стримеры. Действительно, из-за присутствия металлических элементов на некоторых из стримеров всенаправленная конфигурация излучения преобразователей сделана квазивсенаправленной или направленной перпендикулярно к оси стримеров, делая невозможным измерения длительности распространения.
Следует напомнить, что вышеупомянутая проблема описана применительно к определенной области сейсмической разведки в морской среде, но этот способ может быть применен в других областях.
3. ЦЕЛИ ИЗОБРЕТЕНИЯ
Изобретение по меньшей мере в одном варианте воплощения нацелено на преодоление недостатков известного уровня техники.
Более конкретно, целью по меньшей мере одного варианта воплощения изобретения является обеспечить методику оценки скорости звука сигнала акустических узлов в сети акустических узлов, которая гарантирует условие получения надежных величин скоростей звука, используемых навигационной системой, чтобы контролировать позицию датчиков (гидрофонов).
Другой целью по меньшей мере одного варианта воплощения изобретения является обеспечение методики такого типа, который позволяет избежать использования скоростемеров в акустической сети.
Еще одной целью по меньшей мере одного варианта воплощения изобретения является обеспечение методики, которая позволяет уточнить величины скорости звука, измеренной скоростемерами сети.
Дополнительной целью по меньшей мере одного варианта воплощения изобретения является обеспечить простую и недорогую систему, позволяющую достичь указанных целей.
4. КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Конкретный вариант воплощения изобретения предлагает способ для оценки скорости звука в воде в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором между узлами сети передается множество акустических сигналов, указанный способ отличается тем, что он содержит следующие стадии:
- получение двух предопределенных расстояний, каждое из которых разделяет пару узлов, размещенных вдоль одной и той же первой линейной акустической антенны;
- для каждой пары из первых и вторых узлов получение:
- первой длительности распространения акустического сигнала, переданного между указанным первым узлом и третьим узлом, размещенным вдоль второй линейной акустической антенны;
- второй длительности распространения акустического сигнала, переданного между указанным вторым узлом и указанным третьим узлом;
- оценку указанной скорости звука в воде как функции указанных двух предопределенных расстояний и указанной первой и второй длительности распространения, полученной для каждой пары узлов.
Таким образом, этот конкретный вариант воплощения основан на совершенно новом изобретательском решении, которое позволяет либо избежать использования скоростемеров в акустической сети, либо позволяет уточнить величины скорости звука, измеренной скоростемерами, используемыми в акустической сети.
Этот конкретный вариант воплощения также является более надежным, чем известное техническое решение на основе скоростемеров. Фактически, если в известном техническом решении один из этих двух скоростемеров выходит из строя, необходимо извлечь из воды стример (в котором этот скоростемер содержится). В предложенном решении, если узел не может выполнить способ, другие узлы в состоянии сделать это без необходимости извлечения стримера.
Согласно одному конкретному признаку изобретения способ содержит следующие стадии:
a) получение первой пары первой группы узлов, причем каждая первая группа узлов включает одну из указанных пар первых и вторых узлов и соответствующий третий узел и каждая первая группа узлов связана с треугольником, имеющим в качестве вершин указанные первый, второй и третий узлы, при этом третий узел является общим для указанной первой группы узлов;
b) получение для каждой первой группы узлов:
- указанной первой длительности распространения акустического сигнала, передаваемого между указанными третьим и первым узлами;
- указанной второй длительности распространения акустического сигнала, передаваемого между указанными третьим и вторым узлами;
- предопределенного расстояния, разделяющего указанные первый и второй узлы;
c) оценку указанной скорости звука в воде как функции первой и второй длительности распространения и предопределенного расстояния, полученного для каждой первой группы узлов, предполагая, что вершины этих двух треугольников, проходящие через указанный третий узел и связанные с первой парой первой группы узлов, равны.
Общий принцип этого конкретного варианта воплощения заключается в формировании нескольких групп узлов, составляющих два треугольника и определяющих скорость звука на общем уровне узла на основе предпосылки, что вершины этих двух треугольников, проходящие через общий третий узел, равны.
Согласно одному полезному признаку изобретения первые группы узла содержат общий узел, расположенный вдоль указанной первой линейной акустической антенны.
Таким образом, эти два полученных треугольника, ABD и BCD, содержат, помимо общего узла D (который расположен вдоль первой линейной акустической антенны), общий узел В (который расположен вдоль второй линейной акустической антенны), снижая, таким образом, объем вычислений, требуемых для оценки скорости звука.
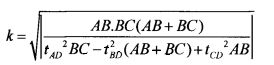
Преимущественно указанная стадия оценки указанной скорости звука в воде вычисляется на основе следующей формулы:
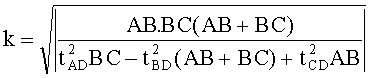
где
k - предполагаемая скорость распространения звука в воде;
АВ - первое предопределенное расстояние, разделяющее первый узел А и второй узел В первой группы узлов ABD;
ВС - первое предопределенное расстояние, разделяющее первый узел В и второй узел С первой группы узлов BCD;
tAD - первая длительность распространения акустического сигнала, переданного между третьим узлом D и первым узлом А для первой группы узлов ABD;
tCD - вторая длительность распространения акустического сигнала, переданного между третьим узлом D и вторым узлом С для первой группы узлов BCD;
tВD - вторая длительность распространения акустического сигнала, переданного между третьим узлом D и вторым узлом В для первой группы узлов ABD, или первая длительность распространения акустического сигнала, переданного между третьим узлом D и первым узлом В для первой группы узлов BCD.
Полезно, если указанная вторая линейная акустическая антенна примыкает к указанной первой линейной акустической антенне.
Это повышает точность измерений длительности распространения сигнала, гарантируя, таким образом, условие надежной оценки скорости звука. Действительно, расстояния между узлами (между узлами, размещенными вдоль различных линейных акустических антенн) являются небольшими, и соответствующая длительность распространения (между этими узлами) также является небольшой.
Преимущественно указанные стадии (а), (b) и (с) выполняются по меньшей мере для двух первых пар первых групп узлов, позволяя получить первую оценку указанной скорости распространения звука для каждой из указанных первых пар. Указанный способ содержит стадию определения окончательной оценки указанной скорости распространения звука в воде в зависимости от указанных первых оценок.
Далее, получая первые оценки скорости звука с несколькими парами групп узлов, можно выполнить обработку (статистический анализ) этих оценок, чтобы уточнить окончательную оценку. В случае среднего числа набора полученных оценок, например, чем больше число оценок, тем меньше стандартное отклонение.
Согласно одному полезному признаку способ содержит следующие стадии:
а') получение второй пары второй группы узлов, причем каждая вторая группа узлов содержит указанный третий узел, четвертый узел и пятый узел, расположенные вдоль третьей линейной акустической антенны, при этом каждая вторая группа узлов связана с треугольником, имеющим в качестве вершин указанные третий, четвертый и пятый узлы;
b') получение для каждой второй группы узлов:
- третьей длительности распространения акустического сигнала, переданного между указанным третьим узлом и указанным четвертым узлом;
- четвертой длительности распространения акустического сигнала, переданного между указанным третьим узлом и указанным пятым узлом;
- предопределенного расстояния, разделяющего указанные четвертый и пятый узлы;
с') оценку скорости распространения звука в воде в зависимости от третьей и четвертой длительности распространения и указанного второго предопределенного расстояния, полученного для каждой второй группы узлов, предполагая, что вершины этих двух треугольников, проходящие через указанный третий узел и связанные со второй парой второй группы узлов, равны;
указанные стадии (а), (b) и (с) позволяют получить первую оценку указанной скорости распространения звука в воде и указанные стадии (а'), (b') и (с') позволяют получить вторую оценку указанной скорости распространения звука в воде, при этом указанный способ содержит стадию определения окончательной оценки указанной скорости распространения звука в воде в зависимости от указанных первой и второй оценок.
Еще одна пара групп узлов может быть сформирована из вторых и третьих линейных акустических антенн, позволяя получить вторую оценку в дополнение к первой оценке скорости распространения звука, полученной с помощью групп узлов, расположенных вдоль первой и второй линейных акустических антенн. Это гарантирует получение надежной величины скорости звука.
Преимущественно указанные стадии (а'), b') и с') выполнены по меньшей мере для двух вторых пар второй группы узлов, позволяя получить вторую оценку указанной скорости распространения звука в воде для каждой из указанных вторых пар. Кроме того, указанный способ содержит стадию определения окончательной оценки указанной скорости распространения звука в зависимости от указанной первой оценки или оценок и указанной второй оценки.
Получая далее вторые оценки скорости звука с несколькими парами групп узлов, можно еще более повысить точность окончательной оценки скорости звука.
Согласно одному полезному признаку изобретения указанные первая и третья линейные акустические антенны не расположены на стороне указанной второй линейной акустической антенны.
В случае ненулевого радиуса кривизны линейных акустических антенн возможная ошибка оценки скорости звука, полученная с первых групп узлов, расположенных вдоль первой и второй антенн, компенсирует возможную ошибку оценки скорости звука, полученной от вторых групп узлов, расположенных вдоль второй и третьей антенн.
В основном, способ реализуется устройством, принадлежащем группе, включающей указанный третий узел и централизованную систему.
В другом варианте воплощения изобретения предлагается продукт компьютерной программы, включающий команды для реализации вышеупомянутого способа (в любом из его различных вариантов воплощения), когда указанная программа выполняется на компьютере.
В другом варианте воплощения изобретения предлагается машиночитаемая память, хранящая компьютерную программу, содержащую ряд команд, выполняемых компьютером, чтобы реализовать вышеупомянутый способ (в любом из его различных вариантов воплощения).
В еще одном варианте воплощения изобретения предлагается устройство для оценки скорости распространения звука в воде в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором множество акустических сигналов передаются между узлами. Устройство содержит:
- средство для получения двух предопределенных расстояний, каждое из которых разделяет пару узлов, размещенных вдоль одной и той же первой линейной акустической антенны;
- средство получения для каждой пары первого и второго узла:
- первой длительности распространения акустического сигнала, переданного между указанным первым узлом и третьим узлом, размещенным вдоль второй линейной акустической антенны;
- второй длительности распространения акустического сигнала, переданного между указанным вторым узлом и указанным третьим узлом;
- средство для оценки указанной скорости распространения звука в воде как функции указанных двух предопределенных расстояний и указанных первой и второй длительности распространения, полученной для каждой пары узлов.
5. СПИСОК ЧЕРТЕЖЕЙ
Другие признаки и преимущества вариантов воплощения изобретения станут ясными из следующего описания, включающего не ограничивающий изобретение пример его осуществления, и из приложенных чертежей, на которых:
- уже описанная выше фигура 1 со ссылками на известный уровень техники представляет собой пример структуры акустического узла, расположенного вдоль стримера;
- уже описанная выше фигура 2 со ссылками на известный уровень техники представляет собой пример сети акустических стримеров, буксируемых судном в процессе сейсмической разведки в морской среде;
- фигура 3 - примерная сеть акустических узлов, в которых реализуется способ оценки согласно конкретному варианту воплощения изобретения;
- фигура 4 - упрощенное схематическое представление, иллюстрирующее способ вычисления скорости распространения звука согласно первому варианту воплощения изобретения;
- фигура 5 - упрощенное схематическое представление, иллюстрирующее способ вычисления скорости распространения звука согласно второму варианту воплощения изобретения;
- фигура 6 - общая блок-схема алгоритма для выполнения способа оценки согласно одному конкретному варианту воплощения изобретения;
- фигура 7 - схема устройства для оценки скорости звука согласно одному конкретному варианту воплощения изобретения.
6. ПОДРОБНОЕ ОПИСАНИЕ
На всех фигурах настоящего документа идентичные элементы и стадии обозначены одними и теми же цифровыми позициями.
Фигуры 1 и 2 уже были описаны выше в связи с известным уровнем техники.
Фигура 3 иллюстрирует пример сети 30 из акустических узлов, в которых реализован способ оценки согласно одному конкретному варианту воплощения изобретения.
Более подробно, представленная здесь сеть иллюстрирует акустическую систему связи, содержащую набор из трех стримеров 31, 32, 33, расположенных по кривой, или при наличии боковых течений, на каждом из которых расположены три акустических узла: узлы, обозначенные как 31а, 31b, 31с для стримера 31, узлы 32а, 32b, 32с для стримера 32 и узлы 33а, 33b, 33с для стримера 33. Каждый узел может поочередно работать как передающий узел и как приемный узел и имеет электроакустический преобразователь для передачи и приема акустических сигналов. Подразумевается, что каждый передающий узел посылает акустический сигнал (обозначен стрелкой на чертеже) по квазивсенаправленной диаграмме излучения, которая позволяет достичь максимального количества акустических узлов в пределах сети. Узел 32b здесь используется как приемный узел, а узлы 31а, 31b, 31с, 33а, 33b, 33с, расположенные вдоль этих двух стримеров 31 и 33 по обеим сторонам стримера 32, используются как передающие узлы.
Следует отметить, что число акустических узлов, показанных на фигуре 3, также как число стримеров, сознательно ограничено просто из соображений ясности изложения, чтобы не перегружать излишними деталями чертежи и описание. Однако понятно, что изобретение может быть реализовано в контексте использования акустической сети, содержащей большее число узлов и стримеров. Кроме того, некоторые акустические узлы сети не должны быть обязательно оборудованы сейсмоприемником 10 для регулирования стримеров (как показано на фигуре 1) и иметь только электроакустический преобразователь 14 и связанный с ним электронный модуль (не показан), который позволяет передавать и получать акустические последовательности.
Акустическая сеть основана на времени, частоте и пространственном режиме доступа (то есть время, частота и пространственное выделение).
Принцип выделения времени - принцип подразделения имеющегося времени на несколько временных интервалов или «времена речи», которые выделены различным узлам сети: каждый узел сети имеет циклическое время речи, в течение которого он передает свой акустический сигнал. Когда узел передает акустический сигнал, все другие узлы могут его слушать.
Принцип выделения частоты заключается в использовании зон кратной гармонической частоты для излучения акустических сигналов, причем каждая полоса частот выделяется определенным узлам сети.
Мы вызываем пространственным выделением тот факт, что два удаленных узла могут излучать сигналы в одно и то же время и в одной и той же ширине полосы частот, если две акустических последовательности прибывают в различные моменты в приемники. Следовательно, не возникает никаких помех между акустическими последовательностями, и приемник в состоянии обработать каждый сигнал независимо.
Некоторые сейсмоприемники 10 могут содержать встроенную электронику, используемую для создания обратной связи, чтобы управлять расстояниями между узлами акустической сети. Расстояния между узлами определяются в зависимости от длительности распространения акустических сигналов, переданных от каждого узла 31а, 31b, 31с, 33а, 33b, 33с к узлу 32, размещенному в стримере 32, и величина скорости звука получается способом оценки согласно изобретению (принцип которого объяснен ниже).
Фигуре 4 - упрощенное схематическое представление, иллюстрирующее способ вычисления скорости распространения звука согласно первому варианту воплощения изобретения.
Ниже считается, что точки А, В, С и D, соответствующие акустическим узлам 31а, 31b, 31с и 32b сети, показанным на фигуре 3, расположены вдоль стримеров 31 и 32. Однако по причине упрощения описания и вычисления скорости звука радиус кривизны каждого из стримеров 31 и 32 здесь рассматриваются как равный нулю.
Таким образом, только два стримера включены в этот конкретный вариант воплощения. В частности, цель состоит в оценке величины скорости звука в точке D во взаимодействии с этими тремя узлами А, В, С. Узел D также называют общим узлом, поскольку этот узел является общим для обоих треугольников ABD и BCD.
Будем считать UVW произвольным треугольником со сторонами UV=с, VW=a, UW=b и высотой WH=h. По известной формуле площадь этого треугольника:

где 
Но площадь треугольника также может быть записана по известной формуле как:
где с - длина основания треугольника UVW.
Из этих двух приведенных выше формул при вычислении площади треугольника UVW мы получаем следующее уравнение:
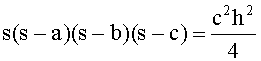
которое после упрощения приводит к следующей формуле (I):

Для треугольника ABD (первая группа узлов) вышеупомянутая формула (I) приводит к следующему уравнению:

Для треугольника BCD (вторая группа узлов) вышеупомянутая формула (I) приводит к следующему уравнению:

Согласно настоящему изобретению способ оценки состоит в поиске скорости звука для узла D, поскольку вершины треугольников ABD и BCD идентичны. В этом упрощенном схематическом представлении фигуры 4 следует отметить тот факт, что HD представляет общую высоту этих двух треугольников ABD и BCD, проходящих через узел D, поскольку радиус кривизны этих двух стримеров 31 и 32 является нулем. Таким образом, после компенсации двух выше формул мы получаем в нашем случае:

Затем, выражая расстояния между узлами, AD, BD и CD соответственно выражаются как:
AD=k·tAD,
где
k - скорость акустического сигнал в точке D [в м/с];
tAD - длительность распространения акустического сигнала между узлами А и D [в с];
BD=k·tBD,
где
k - скорость акустического сигнала в точке D [в м/с];
tBD - длительность распространения акустического сигнала между узлами В и D [в с];
CD=k·tCD,
где
k - скорость акустического сигнала в точке D [в м/с];
tCD - длительность распространения акустического сигнала между узлами С и D [в секундах].
Далее, мы имеем:

Тогда:

Установив Z=k2, мы получаем следующее полиномиальное уравнение:

Это полиномиальное уравнение в степени 2 предлагает два решения:


Согласно уравнениям (1) и (2) мы получаем следующую математическую формулу (II):

Такая формула выражает взаимосвязь между скоростью звука, которую k оценил для общего узла D, длительностью распространения акустических сигналов, переданных между узлами А и D (tAD), между узлами В и D (tBD), между узлами С и D (tCD), и расстояния AB и ВС соответственно, отделяющие узел А от узла В и узел В от узла С.
Общий узел D действует здесь как приемный узел (как показано на фигуре 3), знающий длительности распространения tAD, tBD и tCD. Действительно, узел D оборудован преобразователем (преобразователь 14 из фигуры 1) и связан с электронным модулем (не показан), которые позволяют этому узлу измерить длительности распространения tAD, tBD и tCD акустических сигналов, полученных от узлов А, В и С. Кроме того, общий узел D заранее знает расстояния АВ и ВС, поскольку они были первоначально определены в процессе установки стримера 31. Следовательно, из знания расстояний АВ и ВС и длительности распространения tAD, tBD, tCD узел D может выполнить оценку скорости звука k в окружении точки D. Иными словами, эта оценка скорости звука рассматривается как одна и та же в области нескольких групп узлов ABD и BCD.
В этом описанным выше конкретном варианте воплощения изобретения процесс вычисления скорости звука k выполняется узлом D, который взаимодействует с тремя другими узлами (А, В, С), размещенными в другом одиночном стримере. Затем получаются две группы из трех узлов (А, В, D и В, С, D), чтобы сформировать два треугольника (ABD и BCD). Две группы узлов, имеющие общий узел В, размещенный вдоль стримера 31, вычисляются для оценки скорости распространения звука, следовательно, они упрощены. Действительно, можно предположить, что узел D взаимодействует с дополнительным узлом, помещенным в этот стример 31, например узел В'. Две группы трех полученных узлов могли быть А, В, D и В', С, D, чтобы сформировать два треугольника ABD и B'CD, что означает, что требуется больше измерений длительности распространения, а именно tAD, tBD, tCD, tB'D.
Для вычисления скорости звука k в узле D можно предусмотреть вариант, в котором узел D взаимодействует более чем с тремя узлами, помещенными в тот же самый стример 31. Таким образом, могут быть сформированы другие пары групп из трех узлов, которые позволят получить несколько оценок скорости звука. Каждая сформированная пара групп узлов позволяет получить оценку скорости звука на основе приведенных выше вычислений. Скорость звука, оцененная для узла D, является средним числом из набора оценок скорости звука, приводя, таким образом, к уменьшению стандартного отклонения скорости звука и улучшая точность окончательной оценки скорости звука.
В одном варианте воплощения измерения длительности распространения сначала передаются через шину связи, встроенную непосредственно в стример, от узла D к централизованной системе управления, размещенной на судне, с тем, чтобы централизованная система берет на себя выполнение оценки скорости звука k в точке D. Оценка скорости звука не является локальной (то есть на уровне узла D), но вынесена и осуществляется на уровне центральной системы управления, что подразумевает знания расстояний между узлами. Таким образом, центральная система управления может решить уточнить или заменить величины скорости звука, измеренные и обеспеченные скоростемерами, расположенными на стримерах, используя измерения длительности распространения, обеспечиваемые узлами сети.
Мы можем отметить, что времена распространения, используемое для вычисления скорости звука, могут пройти одним путем или двумя путями. Мы называем время распространения "одним путем" в одном направлении между двумя акустическими узлами (например, от А до D или от D до А) и "двумя путями" как среднее значение двух времен распространения в обоих направлениях. Следовательно, можно предположить, что время распространения выполняется узлом А, В и С вместо D. В этом случае оценка скорости звука в местоположении акустического узла D может быть выполнена центральной системой управления.
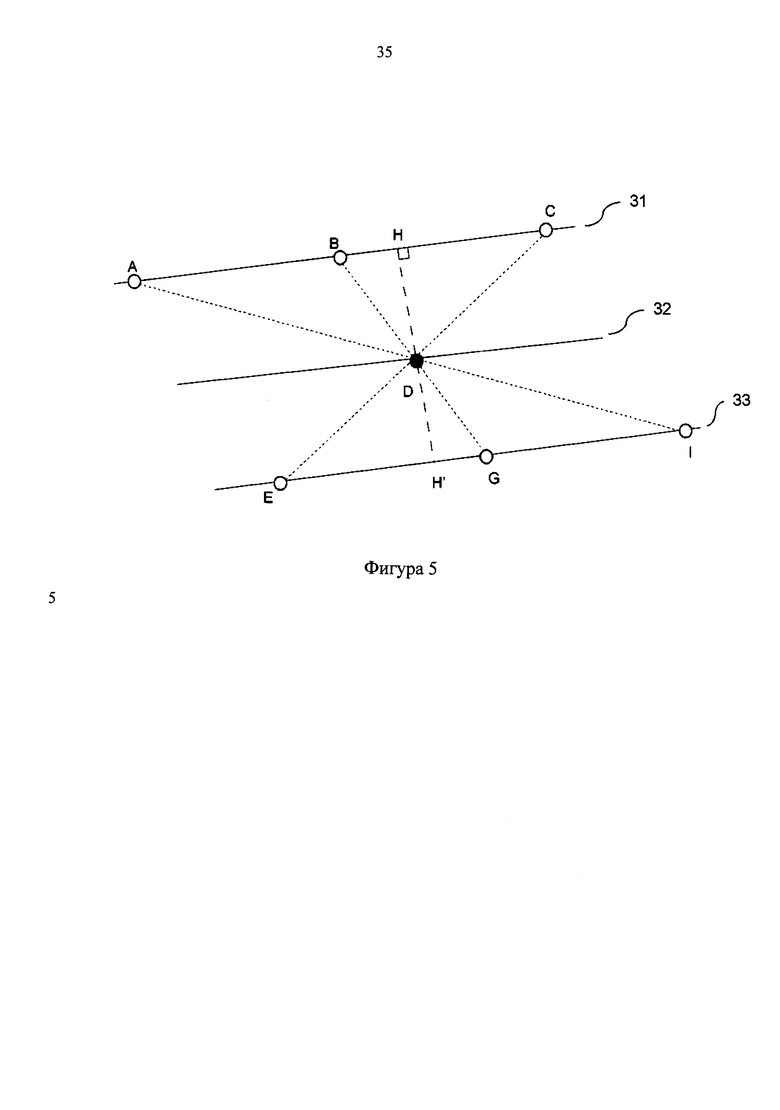
Фигура 5 - упрощенное схематическое представление, иллюстрирующее способ вычисления скорости распространения звука согласно второму варианту воплощения изобретения.
В этом конкретном варианте воплощения вычисление скорости звука k выполняется узлом D, который взаимодействует с шестью узлами, расположенными вдоль двух стримеров 31, 33: три узла А, В, С расположены вдоль стримера 31 и три узла Е, G, I расположены вдоль стримера 33. Эти два стримера 31 и 33 размещены по обеим сторонам стримера 32, где общим узлом является узел D. Таким образом, в противоположность конкретному варианту воплощения фигуры 4, дополнительный стример, содержащий ряд из трех узлов, включен в процесс вычисления скорости звука для узла D.
По причинам упрощения описания и вычисления скорости звука радиус кривизны каждого из стримеров 31, 32, 33 здесь рассматривается как нулевая величина.
HD представляет вершины треугольников ABD и BCD, проходящие через узел D, и H'D представляют вершины треугольников EGD и GID, проходящие через узел D.
Треугольники ABD и BCD соответствуют первым двум узлам группы А, В, D и В, С, D. Путем применения формулы (II), используемой в этом варианте воплощения в качестве фигуры 4 для треугольников ABD и BCD, мы получаем следующее:

Треугольники EGD и GID соответствуют второй паре узлов группы Е, G, D и G, I, D. На основе того же рассуждения, что и на фигуре 4 с высотой H'D, вышеупомянутая формула (II) для треугольников EGD и GID становится:
Окончательная оценка скорости звука, вычисленной в точке D, является средним оценок скоростей звука, полученных для первых и вторых пар групп узлов, а именно:
Уменьшая стандартное отклонение скорости звука, можно улучшить точность скорости звука, оцененной узлом D.
Этот конкретный вариант воплощения является особенно надежным, когда мы имеем дело с возможными ситуациями, в которых стримеры имеют ненулевой радиус кривизны. Практически стримеры могут столкнуться с боковым течением или сменой направления (кривой курса) судна, например, и возникнуть ошибка в расчетном значении скорости звука. Это основано на условии одинаковых радиусов кривизны стримеров: таким образом, увеличенная ошибка, полученная при первом вычислении скорости звука на основе стримера 31 (k1), компенсирует ошибку, полученную при вычислении скорости звука на основе стримера 33 (k2), и наоборот. Следовательно, даже в случае ненулевого радиуса кривизны стримеров оценка скорости звука остается точной.
Следует отметить то, что стримеры 31, 33, включенные в способ вычисления скорости звука и показанные на фигурах 4 и 5, примыкают к стримеру 32, где выполняется вычисление скорости звука. Следует также отметить, что изобретение не ограничено таким вариантом воплощения, и оно также может быть реализовано в акустической сети, включающей несмежные стримеры или комбинацию смежных и несмежных стримеров по отношению к стримеру, где выполняется вычисление скорости звука. В случае оценки, выполненной для пары (пар) групп узлов, размещенных в смежных стримерах, это повышает точность измерений длительности распространения сигнала (стримеры отделены друг от друга на относительно короткое расстояние), гарантируя, таким образом, условие получения более точных величин скоростей звука.
Фигура 6 - общая блок-схема алгоритма 60, по которому реализуется способ оценки согласно одному конкретному варианту воплощения изобретения.
На стадии 61 получены первые две группы из трех узлов. Каждый узел группы содержит первый общий узел (например, узел D), расположенный вдоль первого стримера. Каждая группа узлов первой пары содержит второй узел (А или В) и третий узел (В или С), расположенный вдоль второго стримера и связанный с треугольником (ABD или BCD), имеющим в качестве вершин первый, второй и третий узлы.
На стадии 62 первая длительность распространения акустического сигнала, переданного между первым и вторым узлами, вторая длительность распространения акустического сигнала, переданного между первым и третьим узлами, так же как предопределенное расстояние, разделяющее вторые и третьи узлы, получены для каждой группы узлов, сформированной на предыдущей стадии.
На стадии 63 первая оценка скорости акустического сигнала, обозначенная как k1, выполняется для первого узла (D) в зависимости от первой и второй длительности распространения и предопределенного расстояния, разделяющего второй и третий узлы, на основе принципа, описанного на фигуре 4. Этот принцип основан на предпосылке, что вершины этих двух треугольников (ABD и BCD), проходящие через первый узел D и связанные с двумя группами узлов, равны.
Следовательно, стадии 61-63 охватывают первую пару групп узлов, для которых получена первая оценка (k1) скорости звука.
Стадии 64-66 охватывают вторую пару групп из трех узлов, для которых получена вторая оценка (k2) скорости звука. Стадии 64-66 могут выполняться параллельно со стадиями 61-63.
На стадии 64 получена вторая пара групп из трех узлов. Каждая группа узлов также содержит первый общий узел (D), расположенный вдоль первого стримера. Каждая группа узлов этой второй пары содержит четвертый узел (Е или G) и пятый узел (G или I), расположенный вдоль третьего стримера и связанный с треугольником (EGD или GID), имеющим в качестве вершин первый, второй и третий узлы.
На стадии 65 третья длительность распространения акустического сигнала, переданного между первыми и четвертыми узлами, вторая длительность распространения акустического сигнала, переданного между первыми и четвертыми узлами, так же как предопределенное расстояние, разделяющее четвертый и пятый узлы, получена для каждой группы узлов, сформированной на предыдущей стадии 64.
На стадии 66 вторая оценка (k2) скорости распространения звука выполняется для первого узла (D) как функции первой и второй длительности распространения и предопределенного расстояния, разделяющего четвертый и пятый узлы, на основе принципа, описанного на фигуре 4. Этот принцип основан на предпосылке, что вершины этих двух треугольников (EGD или GID), проходящие через первый узел D и связанные с двумя группами узлов, равны.
Затем, на стадии 67 на основе первой оценки (k1), полученной в результате выполнения стадий 61, 62, 63, и второй оценки (k2) в результате выполнения стадий 64, 65, 66 окончательная оценка (kf) скорости звука определяется с помощью статистической обработки. Например, окончательная оценка представляет собой среднее первой и второй оценок.
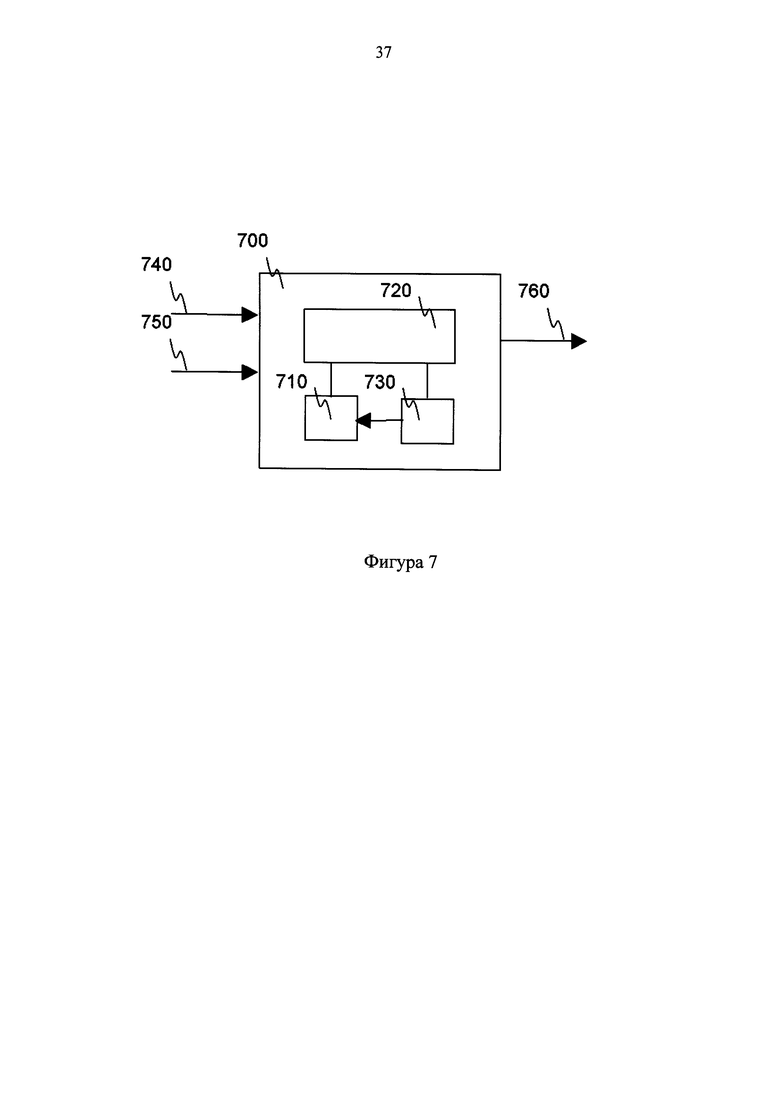
На фигуре 7 представлена упрощенная структура устройства 700, используемого для оценки скорости звука согласно одному конкретному варианту воплощения изобретения.
Устройство 700, используемое для оценки скорости звука, может быть акустическим узлом (таким как узел D на фигурах 4 и 5), блоком управления или навигационной системой.
Устройство 700 для оценки скорости звука содержит:
- постоянную память (ROM) 730;
- оперативную память (RAM) 710 и
- процессор 720.
Постоянная память 730 хранит исполняемый код программы, который при его выполнении процессором 720 включает вариант воплощения методики изобретения, т.е. правила и операции, которые описаны выше в связи с фигурой 6.
При инициализации вышеупомянутые команды кода программы передаются из постоянной памяти 730 в оперативную память 710 для их выполнения процессором 720. Оперативная память 710 включает регистры для хранения переменных и параметров, требуемых для выполнения команд. Процессор 720 получает длительность распространения 740 акустических сигналов и предопределенного расстояния 750 и в соответствии с командами вышеупомянутых программ выдает оценку скорости распространения звука 760.
Все стадии способа оценки могут выполняться с равным успехом:
- путем выполнения ряда компьютерных программ, выполняемых перепрограммируемым компьютером, таким как персональный компьютер (PC), процессор цифровых сигналов (DSP) или микроконтроллер, и результат может быть сохранен в устройстве памяти, которое является съемным (например, гибкий диск, CD-ROM или DVD-ROM) или несъемным; или
- специализированной машиной или компонентом, таким как FPGA (вентильная матрица, программируемая пользователем), ASIC (специализированная интегральная схема) или любой другой специализированный аппаратный компонент.


Способ для оценки скорости звука в воде в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором множество акустических сигналов передается между узлами, при этом способ содержит следующие стадии: получение двух предопределенных расстояний, каждое из которых разделяет пару узлов ((А, В), (В, С)), размещенных вдоль одной и той же первой линейной акустической антенны (31); для каждого узла из пары первых и вторых узлов ((А, В), (В, С)) получение первой длительности распространения акустического сигнала, переданного между указанным первым узлом и третьим узлом (D), размещенным вдоль второй линейной акустической антенны (32), и второй длительности распространения акустического сигнала, переданного между указанным вторым узлом и указанным третьим узлом (D); и оценку указанной скорости распространения звука в воде как функции указанных двух предопределенных расстояний и указанных первой и второй длительности распространения, полученных для каждой пары узлов. 3 н. и 9 з.п. ф-лы, 7 ил.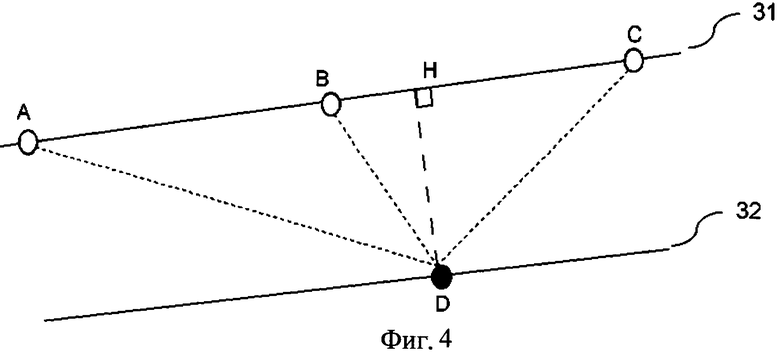
1. Способ для оценки скорости звука в воде в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором множество акустических сигналов передаются между узлами, включающий следующие стадии:
- получение (62) двух предопределенных расстояний, каждое из которых разделяет пару узлов ((А, В), (В, С)), размещенных вдоль одной и той же первой линейной акустической антенны (31);
- для каждой пары из первых и вторых узлов ((А, В), (В, С)) получение (62):
- первой длительности распространения акустического сигнала, переданного между указанным первым узлом (А) и третьим узлом (D), размещенным вдоль второй линейной акустической антенны (32);
- второй длительности распространения акустического сигнала, переданного между указанным вторым узлом и указанным третьим узлом (D);
- оценку (63) указанной скорости распространения звука в воде как функции указанных двух предопределенных расстояний и указанной первой и второй длительности распространения, полученной для каждого из пары узлов.
2. Способ по п. 1, отличающийся тем, что он содержит следующие стадии:
a) получение (61) первой пары первых групп узлов ((А, В, D), (В, С, D)), причем каждая первая группа узлов включает одну из указанных пар первых и вторых узлов ((А, В), (В, С)) и соответствующий третий узел (D) и каждая первая группа узлов связана с треугольником, имеющим в качестве вершин указанные первый, второй и третий узлы, при этом третий узел (D) является общим для указанной первой группы узлов;
b) получение (62) для каждой первой группы узлов:
- указанной первой длительности распространения акустического сигнала, передаваемого между указанными третьим и первым узлами;
- указанной второй длительности распространения акустического сигнала, передаваемого между указанными третьим и вторым узлами;
- предопределенного расстояния, разделяющего указанные первый и второй узлы;
с) оценку (63) указанной скорости распространения звука в воде как функции первой и второй длительности распространения и предопределенного расстояния, полученного для каждой первой группы узлов, предполагая, что вершины этих двух треугольников, проходящие через указанный третий узел и связанные с первой парой первых групп узлов, равны.
3. Способ по п. 2, отличающийся тем, что первые группы узлов содержат общий узел (В), расположенный вдоль указанной первой линейной акустической антенны.
4. Способ по п. 3, отличающийся тем, что указанная стадия оценки указанной скорости распространения звука под водой основана на следующей формуле:
где k - предполагаемая скорость распространения звука под водой;
АВ - первое предопределенное расстояние, разделяющее первый узел А и второй узел В первой группы узлов ABD;
ВС - первое предопределенное расстояние, разделяющее первый узел В и второй узел С первой группы узлов BCD;
tAD - первая длительность распространения акустического сигнала, переданного между третьим узлом D и первым узлом А для первой группы узлов ABD;
tCD - вторая длительность распространения акустического сигнала, переданного между третьим узлом D и вторым узлом С для первой группы узлов BCD;
tBD - вторая длительность распространения акустического сигнала, переданного между третьим узлом D и вторым узлом В для первой группы узлов ABD, или первая длительность распространения акустического сигнала, переданного между третьим узлом D и первым узлом В для первой группы узлов BCD.
5. Способ по п. 1, отличающийся тем, что указанная вторая линейная акустическая антенна (32) примыкает к указанной первой линейной акустической антенне (31).
6. Способ по п. 2, отличающийся тем, что указанные стадии (а), (b) и (с) выполняются по меньшей мере для двух первых пар первых групп узлов, позволяя получить первую оценку указанной скорости распространения звука для каждой из указанных первых пар,
и тем, что указанный способ содержит стадию определения окончательной оценки указанной скорости распространения звука в воде в зависимости от указанных первых оценок.
7. Способ по п. 2, отличающийся тем, что он содержит следующие стадии:
а′) получение (64) второй пары вторых групп узлов ((Е, G, D), (G, I, D)), причем каждая вторая группа узлов содержит указанный третий узел (D), четвертый узел и пятый узел, расположенные вдоль третьей линейной акустической антенны (33), и каждая вторая группа узлов связана с треугольником, имеющим в качестве вершин указанные третий, четвертый и пятый узлы;
b′) получение для каждой второй группы узлов (65):
- третьей длительности распространения акустического сигнала, переданного между указанным третьим узлом и указанным четвертым узлом;
- четвертой длительности распространения акустического сигнала, переданного между указанным третьим узлом и указанным пятым узлом;
- предопределенного расстояния, разделяющего указанные четвертый и пятый узлы;
с′) оценку (66) скорости распространения звука в воде как функции третьей и четвертой длительности распространения и указанного второго предопределенного расстояния, полученного для каждой второй группы узлов, предполагая, что вершины этих двух треугольников, проходящие через указанный третий узел и связанные со второй парой второй группы узлов, равны;
причем указанные стадии (а), (b) и (с) позволяют получить первую оценку указанной скорости распространения звука в воде и указанные стадии (а′), (b′) и (с′) позволяют получить вторую оценку указанной скорости распространения звука в воде;
и также тем, что указанный способ содержит стадию (66) определения окончательной оценки указанной скорости распространения звука в воде как функции указанных первой и второй оценок.
8. Способ по п. 7, отличающийся тем, что указанные стадии (а′), b′) и с′) выполняются по меньшей мере для двух вторых пар вторых групп узлов, позволяя получить вторую оценку указанной скорости распространения звука в воде для каждой из указанных вторых пар,
и тем, что указанный способ содержит стадию определения окончательной оценки указанной скорости распространения звука как функции указанной первой оценки или оценок и указанной второй оценки.
9. Способ по п. 7, отличающийся тем, что указанная первая (31) и третья (33) линейные акустические антенны не расположены на одной и той же стороне указанной второй линейной акустической антенны (32).
10. Способ по п. 1, отличающийся тем, что он выполняется устройством (700), принадлежащим группе, содержащей:
- указанный третий узел;
- центральную систему управления.
11. Машиночитаемые средства памяти, хранящие компьютерную программу, содержащую ряд программ, исполняемых компьютером, для реализации способа согласно любому из пп. 1-10.
12. Устройство (700) для оценки скорости звука в воде в сети акустических узлов, расположенных вдоль буксируемых линейных акустических антенн, в котором множество акустических сигналов передается между узлами, при этом устройство отличается тем, что оно содержит:
- средство для получения двух предопределенных расстояний, каждое из которых разделяет пару узлов, размещенных вдоль одной и той же первой линейной акустической антенны;
- средство для получения для каждого узла из пары первого и второго узлов (А, В):
- первой длительности распространения акустического сигнала, переданного между указанным первым узлом (А) и третьим узлом (D), размещенным вдоль второй линейной акустической антенны;
- второй длительности распространения акустического сигнала, переданного между указанным вторым узлом (В) и указанным третьим узлом (D);
- средства для оценки указанной скорости распространения звука в воде как функции указанных двух предопределенных расстояний и указанной первой и второй длительности распространения, полученной для каждого из пары узлов.
| WO2011014071 A2, 03.02.2011 | |||
| US2009003135 A, 01.01.2009 | |||
| ШЛАНГОВАЯ ГИДРОФОННАЯ СЕКЦИЯ БУКСИРУЕМОГО СТРИМЕРА | 1998 |
|
RU2136019C1 |
| US5142507 A, 25.08.1992. | |||

