Изобретение относится к области нетрадиционной энергетики, в частности к способам преобразования кинетической энергии текучей среды во вращательное движение крыла и к установкам для его осуществления, и может быть использовано как источник электрической, тепловой и механической энергии в гидро- и ветроустановках.
В связи с ухудшением экологии Земли, удорожанием энергоносителей и постоянно растущим дефицитом энергоресурсов, приобретает большое значение использование такого возобновляемого источника энергии, как естественное течение равнинных рек путем создания бесплотинных гидроэнергетических станций, не нарушающих их русла.
Скорость течения рек на равнинных участках составляет примерно от 0,2 - 0,4 до 3 м/с. Преимущественно, среднеклиматическая скорость течения составляет около 1 м/с. При таких низких скоростях течения использование традиционных преобразователей кинетической энергии потока воды в механическую - гидротурбин - является неэффективным. Например, для получения 1 кВт энергии при скорости потока 1 м/с необходима гидротурбина диаметром не менее 3,5 м, которая перекрывает примерно 10 м2 поперечного сечения русла реки. Затраты на изготовление, монтаж и эксплуатацию столь громоздкой установки слишком велики и не окупаются в процессе ее эксплуатации.
Снижение габаритов, а следовательно, и стоимости гидротурбин возможно при больших скоростях потока, поэтому они и нашли свое применение в напорных и рукавных конструкциях.
Проблема использования такого возобновляемого источника энергии, как свободный поток текучей среды состоит в повышении эффективности конструкций, преобразующих кинетическую энергию потока в другие виды энергии без нарушения экологии.
Широко известен способ преобразования кинетической энергии текучей среды во вращательное движение крыла (см., например, патент AU N 522160). Этот способ заключается в том, что крыло, помещенное в поток текучей среды, под действием гидродинамических сил вращается по круговой орбите, ось которой перпендикулярна этому потоку. Продольная ось крыла установлена параллельно оси круговой орбиты. В процессе движения крыла по круговой орбиты на одной полуокружности угол атаки крыла выдерживают с одним знаком, а на другой угол атаки крыла изменяют на противоположный. При этом используются небольшие углы атаки, например 8-10o, т.е. не превышающие "критических" значений для стационарного режима обтекания крыла.
Однако изменение углов атаки производят так, что на части дуги круговой орбиты, на которой крыло движется против направления движения потока текучей среды и на части дуги круговой орбиты, на которой крыло движется по направлению движения этого потока (это в сумме составляет, примерно, от 1/4 до 1/3 части круговой орбиты) возникает значительный отрицательный вращающий момент, который тормозит движение крыла и, таким образом, снижает эффективность преобразования кинетической энергии текучей среды во вращательное движение крыла.
Кроме того, использование небольших углов атаки не позволяет эффективно преобразовывать кинетическую энергию текучей среды в другие виды энергии и не дает возможность использовать потоки с малыми скоростями.
Известно устройство, осуществляющее вышеописанный способ (см. там же патент AU N 522160). Оно содержит неподвижную ось, установленную в потоке текучей среды перпендикулярно направлению его движения; крыло, продольная ось которого параллельна указанной неподвижной оси, шарнирно связанное с этой неподвижной осью с помощью стержня, причем крыло снабжено устройством управления его углом атаки, выполненным в виде крыловидного элемента, снабженного собственным приводом для управления его угловым положением относительно крыла.
Однако устройство управления углом атаки крыла, выполненное в виде крыловидного элемента с осью его поворота, расположенной в хвостовой части профиля крыла, предназначено для получения только небольших величин углов атаки крыла. Оно не может быть использовано для получения больших значений углов атаки крыла, т. к. крыловидный элемент при большом угле отклонения относительно крыла попадет в зону "затенения крылом", т.е. в зону разрежения и эффективность его становится недостаточной, чтобы уравновесить крыло на больших углах атаки. Кроме того, такое расположение крыловидного элемента относительно крыла при больших углах атаки способствует быстрому образованию отрыва присоединенного потока как по углам атаки, так и по времени.
Таким образом, установка с таким устройством управления углом атаки крыла не эффективна для преобразования кинетической энергии текучей среды во вращательное движение крыла.
Известен другой способ преобразования кинетической энергии текучей среды во вращательное движение крыла (см., например, патент AU PCT/AU90/00600). Этот способ в основном аналогичен описанному выше за исключением того, что предполагает производить изменение углов атаки крыла, движущегося по круговой орбите в точках 0 и 180o.
Он имеет те же недостатки, что и описанный выше способ, согласно патенту AU N 522160. Кроме того, мгновенное изменение углов атаки на противоположное значение практически неосуществимо, с другой стороны, сокращение до минимума времени перестановки крыловидного элемента относительно крыла для изменения его углов атаки приводит к снижению эффективности преобразования кинетической энергии текучей среды во вращательное движение крыла.
Известно устройство, осуществляющее вышеописанный способ (см., тот же патент AU PCT/AU90/00600). Устройство содержит те же элементы, что и установка согласно патенту, описанному выше. Дополнительно предложен вариант, в котором крыло снабжено управляемым закрылком в сочетании с неуправляемым крыловидным элементом.
Однако и это устройство управления углом атаки крыла, выполненное в виде управляемого закрылка в сочетании с неуправляемым крыловидным элементом, предназначено также для получения только небольших величин углов атаки крыла. Оно также не может быть использовано для получения больших значений углов атаки крыла, крыловидный элемент находится в зоне "затенения закрылком", т. е. в зоне разрежения, что также способствует быстрому образованию отрыва присоединенного потока. Таким образом, установка и с таким вариантом устройства управления углом атаки крыла также не эффективна для преобразования кинетической энергии текучей среды во вращательное движение крыла.
Задачей настоящего изобретения является создание такого способа преобразования кинетической энергии текучей среды во вращательное движение крыла и установки для его осуществления, которые бы за счет использования эффектов нестационарного режима обтекания крыла, обеспечили бы значительное повышение эффективности преобразования кинетической энергии текучей среды в другие виды энергии.
Эта задача решается тем, что в способе преобразования кинетической энергии текучей среды во вращательное движение крыла, заключающемся в том, что в текучую среду устанавливают неподвижную ось перпендикулярно направлению движения потока этой текучей среды, на некотором расстоянии от этой оси помещают крыло, собственная продольная ось которого параллельна неподвижной оси, вокруг которой это крыло под действием гидродинамических сил, действующих на него, совершает вращательное движение по круговой орбите и колебательное движение вокруг собственной продольной оси, согласно изобретению при движении крыла по дуге круговой орбиты, обращенной к потоку текучей среды, величину угла атаки крыла выдерживают постоянной с одним знаком, а при движении крыла по противоположной дуге круговой орбиты, знак постоянной величины угла атаки крыла изменяют также на противоположный, причем на дуге круговой орбиты, на которой крыло движется против направления движения потока текучей среды, и на дуге круговой орбиты, на которой крыло движется по направлению движения этого потока, значение угла атаки устанавливают равным нулю.
Это дает возможность повысить эффективность преобразования кинетической энергии текучей среды во вращательное движение крыла.
Возможно, при движении крыла по круговой орбите постоянную величину его угла атаки устанавливать выше "критической" величины стационарного режима обтекания для выбранного профиля и формы крыла.
Это позволяет в несколько раз повысить эффективность преобразования кинетической энергии текучей среды во вращательное движение крыла.
Расстояние продольной оси крыла от неподвижной оси устанавливают в зависимости от величины хорды крыла: чем больше хорда крыла, тем больше расстояние продольной оси от неподвижной оси.
Это позволяет обеспечить эффективную работу крыла на больших углах атаки (20-40o и более).
Целесообразно, величину окружной скорости крыла выбирать больше скорости потока.
Это обеспечивает эффективный режим преобразования кинетической энергии текучей среды во вращательное движение крыла.
Эта задача решается также тем, что в установке для преобразования кинетической энергии текучей среды во вращательное движение крыла, содержащей неподвижную ось, установленную в потоке текучей среды перпендикулярно направлению его движения, крыло, продольная ось которого параллельна указанной неподвижной оси, шарнирно связанное с этой неподвижной осью с помощью по меньшей мере одного стержня, причем крыло снабжено устройством управления его углом атаки, выполненным в виде крыловидного элемента, снабженного собственным приводом для управления его угловым положением относительно крыла, согласно изобретению привод управления угловым положением крыловидного элемента относительно крыла обеспечивает угол атаки крыла при его движении по дуге круговой орбиты, обращенной к потоку текучей среды, постоянным с одним знаком, по противоположной дуге с обратным знаком, а при переходе крыла с одной дуги на другую - равным нулю.
Это позволяет преобразовать кинетическую энергию текучей среды в другие виды энергии.
Целесообразно, чтобы привод для управления угловым положением крыловидного элемента относительно крыла обеспечил диапазон углов атаки крыла выше 20-40o.
Это позволяет получать углы атаки крыла выше "критических" величин стационарного режима обтекания выбранного профиля и формы крыла, что обеспечивает значительное повышение эффективности преобразования кинетической энергии текучей среды во вращательное движение крыла.
Возможно крыло и/или крыловидный элемент снабжены закрылком, связанным с приводом.
Это позволяет достигнуть оптимальной эффективности установки.
Возможно, чтобы привод для управления угловым положением крыловидного элемента относительно крыла содержал кулачковый механизм, кулачок которого закреплен на неподвижной оси, а коромысло установлено на стержне и связано с рычагом, имеющим два плеча, ось которого совпадает с центром шарнирного соединения стержня с крылом и на этой же оси установлен кулисный механизм, имеющий кулису и два ползуна, причем один ползун связан с плечом двуплечего рычага и с рычагом, который установлен на той же оси и связан с крыловидным элементом, а второй ползун связан со стержнем и с крылом.
Это позволяет получать необходимые углы атаки крыла во время его движения по круговой орбите.
В дальнейшем патентуемое изобретение поясняется конкретными примерами его выполнения и прилагаемыми чертежами, на которых:
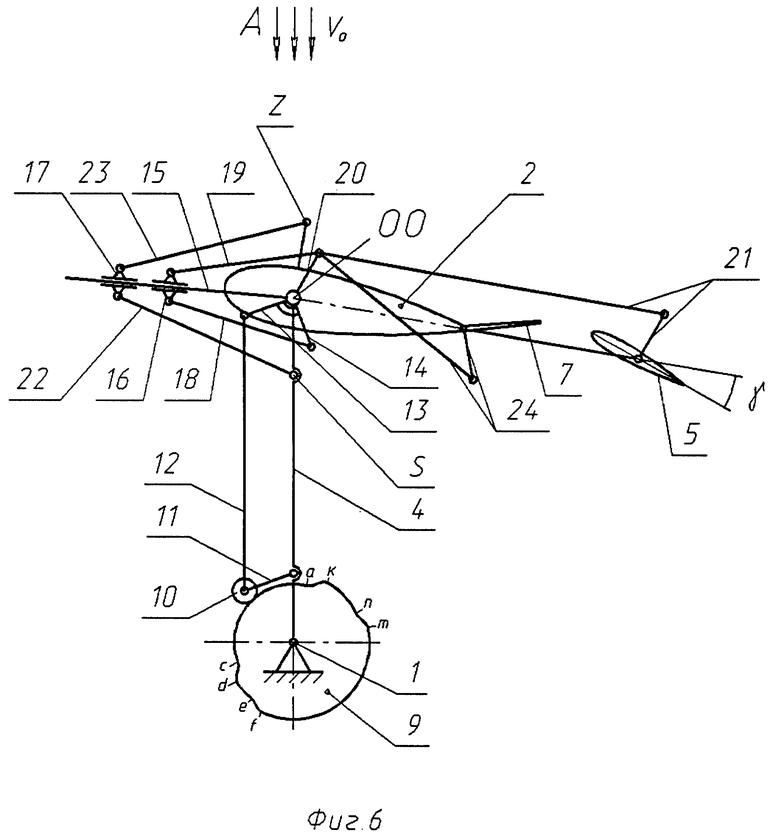
фиг. 1 изображает в общем виде крыло с крыловидным элементом в потоке текучей среды согласно изобретению;
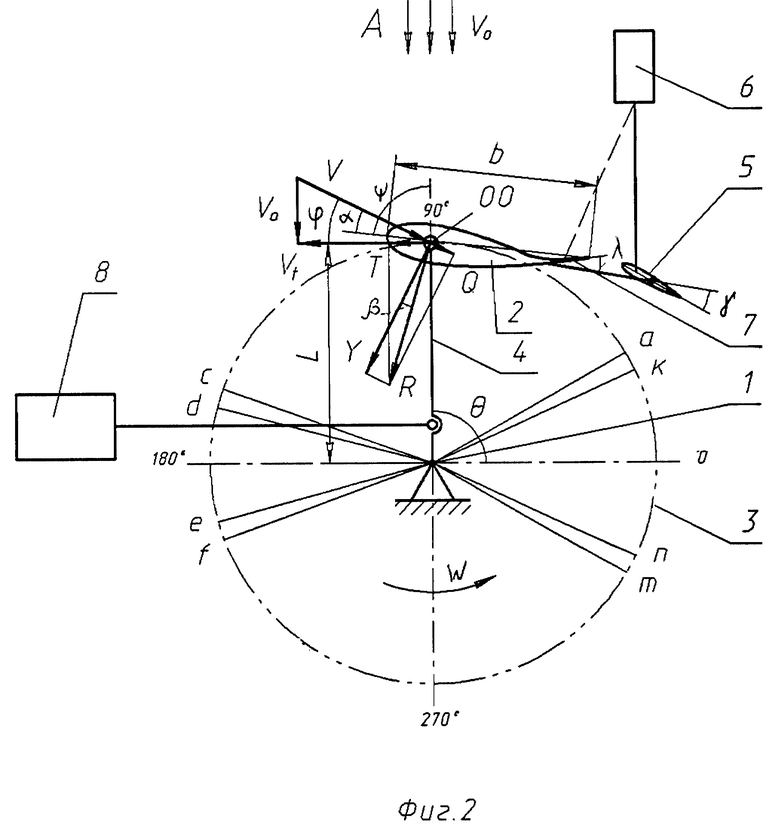
фиг. 2 изображает принципиальную схему установки для преобразования кинетической энергии текучей среды в другой вид энергии и векторы скоростей крыла и сил, действующих на него во время движения, согласно изобретению;
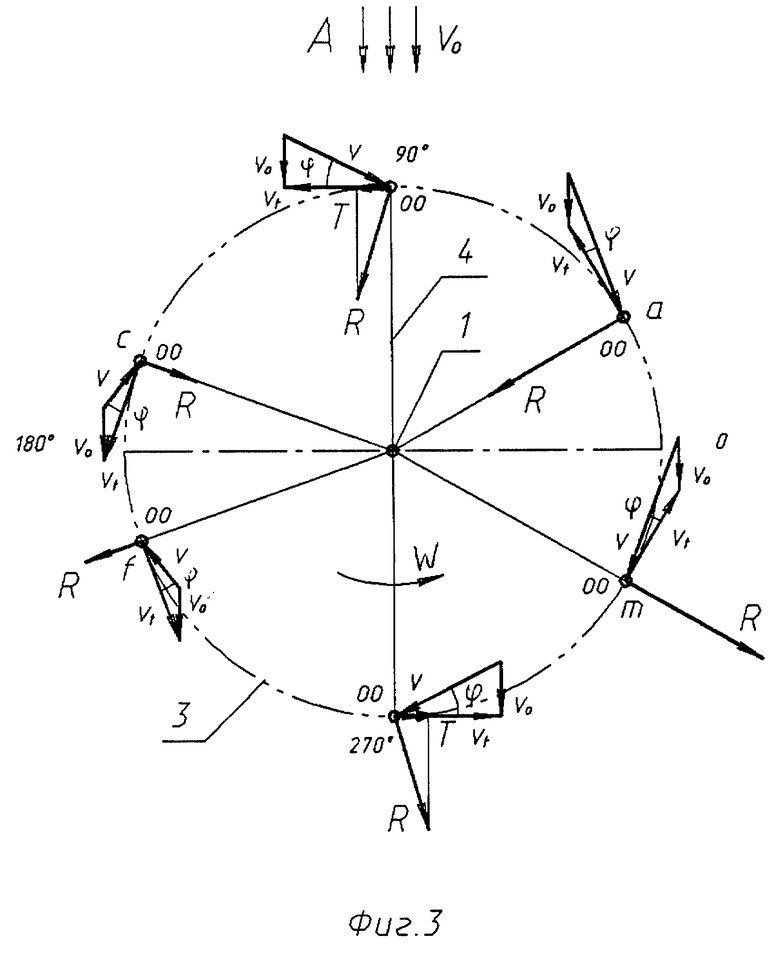
фиг. 3 изображает диаграмму векторов потока текучей среды, окружной скорости крыла, набегающего на него потока, гидродинамической силы, действующей на крыло, и ее проекции на направление вектора окружной скорости крыла, согласно изобретению;
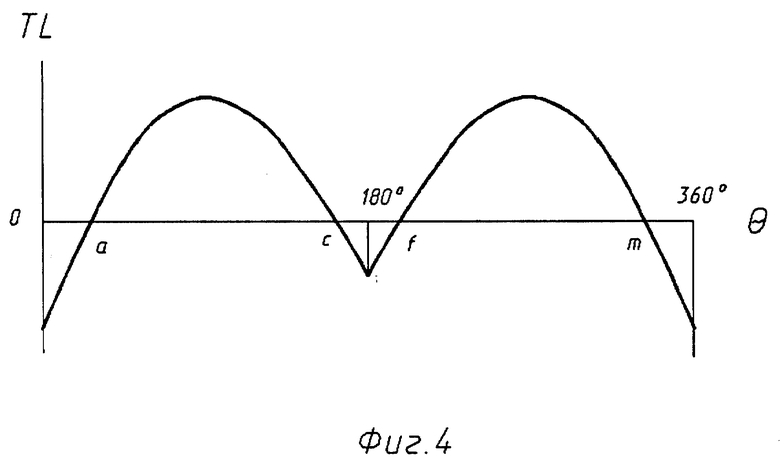
фиг. 4 изображает график зависимости крутящего момента от положения крыла на круговой орбите за один оборот согласно изобретению;
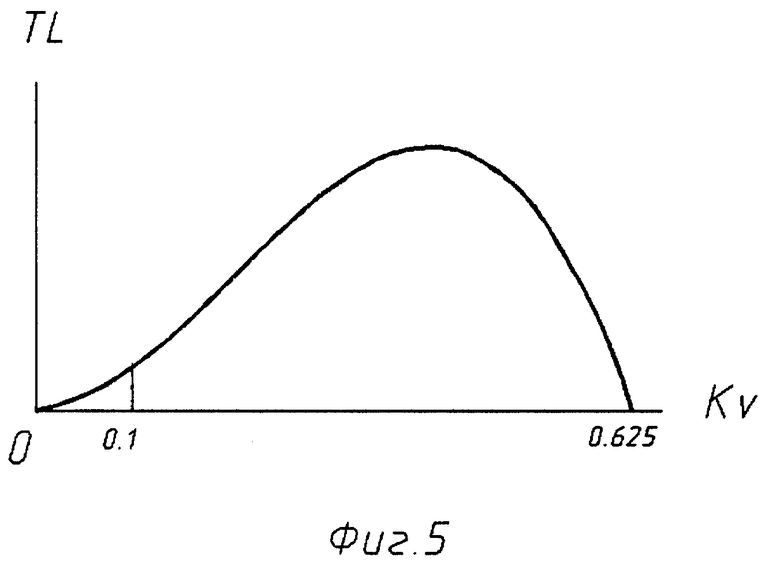
фиг. 5 изображает график зависимости среднего крутящего момента от коэффициента скорости согласно изобретению;
фиг. 6 изображает кинематическую схему одного из вариантов выполнения привода для управления угловым положением крыловидного элемента относительно крыла согласно изобретению.
Патентуемый способ преобразования кинетической энергии текучей среды во вращательное движение крыла заключается в следующем.
В поток текучей среды, например жидкости, либо газа, показанный стрелкой A (фиг. 1, 2), движущейся со скоростью V0, устанавливают неподвижную ось 1 перпендикулярно направлению движения этого потока. На некотором расстоянии от этой оси 1 помещают крыло 2, собственная продольная ось OO которого параллельна неподвижной оси 1, вокруг которой это крыло 2 под действием гидродинамических сил R, действующих на него, совершает вращательное движение по круговой орбите 3, например, против часовой стрелки с угловой скоростью W (как показано на фиг. 2) и колебательное движение вокруг собственной продольной оси OO.
При движении крыла 2 по дуге круговой орбиты 3, обращенной к потоку A текучей среды, величину угла α атаки крыла 2 выдерживают постоянной с одним знаком, например, положительным, а при движении крыла 2 по противоположной дуге круговой орбиты 3, знак постоянной величины угла α атаки крыла 2 изменяют также на противоположный, например отрицательный. На дуге круговой орбиты 3, на которой крыло 2 движется против направления движения потока A текучей среды, и на дуге круговой орбиты 3, на которой крыло 2 движется по направлению движения этого потока, значение угла α атаки устанавливают равным нулю.
При движении крыла 2 по круговой орбите 3 величину его угла α атаки можно установить выше "критической" величины стационарного режима обтекания для выбранного профиля и формы крыла 2.
Расстояние L продольной оси OO крыла 2 от неподвижной оси 1 устанавливают в зависимости от величины хорды b крыла 2 и чем больше хорда b крыла 2, тем больше расстояние L продольной его оси OO от неподвижной оси 1.
Уменьшение хорды b крыла 2 или непропорциональное увеличение расстояния L продольной оси OO крыла 2 от неподвижной оси 1 приводит к преждевременному срыву потока с крыла 2 при его движении с углом α атаки - по величине выше "критического" для стационарного режима обтекания, что снижает эффективность преобразования кинетической энергии текучей среды во вращательное движение крыла 2, а нарушение пропорциональности между хордой b крыла 2 и расстоянием L исключает возможность применения больших углов α атаки.
Величину окружной скорости Vt крыла 2 выбирают больше скорости Vo потока A текучей среды.
Угол α атаки крыла 2 выдерживают постоянным любым из известных способов, например путем изменения угла ψ между хордой b крыла 2 и направлением движения потока A текучей среды.
Рассмотрим движение крыла 2 с угловой скоростью W по круговой орбите 3 - против часовой стрелки, как показано на фиг. 2.
Тогда при движении крыла 2 по дуге "ас" круговой орбиты 3, обращенной к потоку A, и по противоположной дуге "fm" - крыло движется поперек потока A текучей среды, по дуге "cf" крыло движется по потоку A, а по дуге "ma" - против этого потока A.
В процессе движения крыла 2 по дуге "ac" круговой орбиты 3, обращенной к потоку A текучей среды, т.е. от положения "a" к положению "c", величину угла α атаки крыла 2 выдерживают постоянной с одним знаком.
На дуге "cd" круговой орбиты 3 угол α атаки крыла 2 изменяют до нуля.
По дуге "de" круговой орбиты 3 крыло 2 движется с нулевым углом α атаки.
На дуге "ef" круговой орбиты 3 угол α атаки крыла 2 изменяют от нуля до первоначально установленного величины, но с обратным знаком.
При движении крыла 2 по противоположной дуге "fm" круговой орбиты 3 величину угла α атаки крыла 2 выдерживают постоянной.
Далее на дуге "mn""круговой орбиты 3 угол α атаки крыла 2 изменяют до нуля и по дуге "nk" круговой орбиты 3 крыло 2 движется с нулевым углом α атаки.
Затем на дуге "ka" круговой орбиты 3 угол α атаки крыла 2 изменяют от нуля до первоначально установленного величины.
После чего цикл движения крыла 2 по круговой орбите 3 повторяют.
Заявляемая установка (фиг. 1, 2), осуществляющая патентуемый способ преобразования кинетической энергии текучей среды во вращательное движение крыла 2, содержит неподвижную ось 1, установленную в потоке A текучей среды перпендикулярно направлению его движения, по меньшей мере одно крыло 2, продольная ось OO которого параллельна указанной неподвижной оси 1, шарнирно связанное с этой неподвижной осью 1 с помощью стержня 4 длиной L. Крыло 2 имеет возможность совершать под действием гидродинамических сил R вращательное движение по круговой орбите 3 и колебательное движение вокруг собственной продольной оси OO с помощью устройства управления его углом α атаки.
Хотя на фигурах представлено одно крыло 2, следует иметь в виду, что их может быть и больше, например два, три и т.д.
Устройство управления углом α атаки крыла 2 выполнено в виде крыловидного элемента 5, который снабжен собственным приводом 6 для управления его угловым положением относительно крыла 2.
На крыле 2 может быть установлен управляемый закрылок 7. Управление может осуществляться либо от его собственного привода, либо от привода 6 крыловидного элемента 5, что значительно проще.
Следует учесть, что закрылком 7 может быть снабжено не только крыло 2, но и крыловидный элемент 5, либо и крыло 2 и крыловидный элемент 5 одновременно, однако эти варианты не показаны. И в этом случаи управление закрылком 7 может осуществляться либо от его собственного привода, либо от привода 6 крыловидного элемента 5.
Преобразователь 8 предназначен для преобразования вращательного движения крыла 2 в другие виды энергии, например электрическую, тепловую, механическую и т.д.
Хотя на фигурах представлен один крыловидный элемент 5, следует иметь в виду, что их может быть и больше, например два и т.д.
Заявляемая установка работает следующим образом.
Рассмотрим движение крыла 2 с угловой скоростью W по круговой орбите 3 - против часовой стрелки, как показано на фиг. 2.
При движении крыла 2 по дуге "ас", обращенной к потоку A, и по противоположной дуге "fm" - крыло 2 движется поперек потока A текущей среды, по дуге "cf" крыло 2 движется по потоку A, а по дуге "ma" - против этого потока A.
На векторной диаграмме фиг. 3 в общем виде условно представлено изменение направлений и величин суммарного вектора V набегающего на крыло 2 потока, например, в точке OO, при движении его по круговой орбите 3 с угловой скоростью W в потоке A текучей среды, движущейся со скоростью Vo; гидродинамической силы R, действующей на крыло 2, и ее проекции T на направление вектора окружной скорости Vt крыла 2, которая определяет вращающий момент T•L.
Так при движении крыла 2 по дуге "ас", обращенной к потоку A текучей среды, т.е. от положения "а" к положению "с", вектор V направлен со стороны выпуклой части дуги, относительно направления движения потока A, а при движении крыла 2 по противоположной дуге "fm" круговой орбиты 3, т.е. от положения "f" к положению "m", вектор V направлен со стороны вогнутой части дуги, относительно направления движения потока A. В соответствии с этим для получения положительного вращающего момента T•L на выпуклой и вогнутой дугах круговой орбиты 3 изменяют и знак угла α атаки крыла 2 на противоположный.
При движении крыла 2 по дуге "cf", т. е. по потоку А, и по дуге "ma", т. е. против этого потока A, на которых угол ϕ между векторами V и Vt не больше угла β между гидродинамической силой R и перпендикуляром к вектору V, вращающий момент T•L от гидродинамических сил R, действующих на крыло 2, - отрицательный, поэтому чтобы его величина была минимальной, крыло 2 должно иметь наименьшее сопротивление, т.е. на этих дугах желательно устанавливать крыло 2 с нулевым углом α атаки.
Выше изложенное иллюстрируется графиком (фиг. 4) зависимости крутящего момента T•L гидродинамической силы R, действующей на крыло 2, от угла θ при движении его по круговой орбите 3 в потоке A текучей среды, за полный оборот.
На фиг. 5 приведен график зависимости среднего крутящего момента T•L за один оборот от коэффициента скорости Kv=Vt/(Vo/K).
Практическое значение имеет режим, при котором Vt > Vo, т.е. Kv > 0,1-0,02 (при K= 10-50, соответственно, где K=Cy/Cx - "качество" крыла 2, Cy - коэффициент подъемной силы, Cx - коэффициент сопротивления). Т.к. при меньших окружных скоростях Vt работа устройства 6 управления углом α атаки крыла 2 становится неопределенной при движении крыла 2 по дуге "cf", т.е. по направлению потоку A. Кроме того, эффективность установки при этих режимах очень низка.
Максимально возможное значение коэффициента Kv скорости составляет примерно 0,625, т.е. при падении нагрузки на крыле 2 его окружная скорость Vt может превышать скорость Vo потока A текучей среды от 6,5 до 32,5 раза при K=10-50, соответственно.
В процессе движения крыла 2 (фиг. 2) по дуге "ас" круговой орбиты 3, обращенной к потоку A текучей среды, т.е. от положения "a" к положению "c", крыловидный элемент 5 устанавливают под углом γ относительно крыла 2 и создают момент, относительно оси OO шарнирного соединения крыла 2 со стержнем 4, уравновешивающий момент крыла 2 с углом α атаки. Величина угла α атаки крыла 2 определяется величиной угла γ.
Если крыло 2 снабжено управляемым закрылком 7, то последний устанавливают под углом λ относительно крыла 2 по направлению, противоположному углу γ установки крыловидного элемента 5 относительно крыла 2.
В процессе постоянного изменения угла ϕ вектора V происходит изменение моментов от крыловидного элемента 5 и крыла 2, относительно оси OO шарнирного соединения крыла 2 со стержнем 4, нарушается равновесие системы крыло - крыловидный элемент, и она поворачивается, все время стремясь к равновесному состоянию, т.е. выдерживая заданный угол α атаки крыла 2.
На дуге "cd" круговой орбиты 3 привод 6 изменяет угол γ крыловидного элемента 5 до нуля и крыло 2 устанавливается по вектору V местного потока.
Если крыло 2 снабжено управляемым закрылком 7, то последний также устанавливают под нулевым углом λ относительно крыла 2.
По дуге "de" круговой орбиты 3 крыло 2 движется с нулевым углом α атаки.
На дуге "ef" круговой орбиты 3 привод 6 изменяет угол γ крыловидного элемента от нуля до -γ, в результате на нем возникает момент, относительно оси OO шарнирного соединения крыла 2 со стержнем 4, который устанавливает крыло 2 под углом α атаки, но с обратным знаком.
Если крыло 2 снабжено управляемым закрылком 7, то последний устанавливают также под углом -λ относительно крыла 2.
При движении крыла 2 по противоположной дуге "fm" круговой орбиты 3, в процессе постоянного изменения угла ϕ вектора V, опять происходит изменение моментов на крыловидном элементе 5 и крыле 2, относительно оси OO шарнирного соединения крыла 2 со стержнем 4. Снова нарушается равновесие системы крыло - крыловидный элемент, и она опять поворачивается, все время стремясь к равновесному состоянию, т.е. опять выдерживая заданный угол α атаки крыла 2.
Далее на дуге "mn" круговой орбиты 3 привод 6 снова изменяет угол γ крыловидного элемента 5 до нуля и крыло 2 опять устанавливается по вектору V местного потока.
Если крыло 2 снабжено управляемым закрылком 7, то последний также устанавливают под нулевым углом λ относительно крыла 2.
По дуге "nk" круговой орбиты 3 крыло 2 движется с нулевым углом α атаки.
Затем на дуге "ka" круговой орбиты 3 привод 6 снова изменяет угол γ крыловидного элемента от нуля до γ, в результате чего на нем опять возникает момент, относительно оси OO шарнирного соединения крыла 2 со стержнем 4, который снова устанавливает крыло 2 с первоначально заданным углом α атаки.
Если крыло 2 снабжено управляемым закрылком 7, то последний опять устанавливают под углом λ относительно крыла 2.
После чего цикл движения крыла 2 по круговой орбите 3 повторяют.
Привод 6 (фиг. 2) для управления угловым положением крыловидного элемента 5 относительно крыла 2 в одном из вариантов его выполнения может содержать (фиг. 6): кулачковый механизм, кулачок 9 которого закреплен на неподвижной оси 1. Профиль кулачка 9 образован четырьмя дугами. Две дуги "de" и "nk" одинакового радиуса и расположены диаметрально противоположно, одна дуга "ac" имеет меньший, а другая "fm" больший радиусы. Все дуги плавно переходят одна в другую. Кулачок 9 взаимодействует с роликом 10 коромысла 11, которое установлено на стержне 4. Прижатие ролика 10 к кулачку 9 осуществляется, например, пружинами (на фиг. 6 не показано).
Коромысло 11 посредством тяги 12 связано с рычагом, имеющим два плеча 13 и 14, ось которого совпадает с осью OO. На этой же оси OO установлен кулисный механизм, имеющий кулису 15 и два ползуна 16 и 17. Один ползун 16 связан тягой 18 с плечом 14 двуплечего рычага и тягой 19 с рычагом 20, ось которого совпадает также с осью OO. Рычаг 20 связан системой рычагов 21 с крыловидным элементом 5. Второй ползун 17 связан тягой 22 со стержнем 4 в точке S и тягой 23 с крылом 2 в точке Z.
На крыле 2 может быть установлен закрылок 7. В этом случаи он также связан с рычагом 20, например, при помощи системы рычагов 24.
В процессе работы установки, т.е. при вращении крыла 2 под действием гидродинамических сил R вокруг неподвижной оси 1 с установленным на ней кулачком 9, который ориентирован относительно потока A текучей среды так, что когда крыло 2 движется по потоку A, т.е. по дуге "de" (фиг. 2), и против этого потока A, т.е. по дуге "nk", ролик 10 (фиг. 6) в то же время обкатывается по соответствующим дугам одинакового радиуса.
Коромысло 11, оперативно взаимодействующее с кулачком 9, за полный оборот попеременно занимает четыре положения: средние, когда крыло 2 движется по и против потока A, и крайние, когда крыло 2 движется поперек потока A. В соответствии с этим и крыловидный элемент 5 занимает относительно крыла 2 то нейтральное положение, когда крыло 2 движется по и против потока A, то отклонен на отрицательный или положительный угол γ, когда крыло 2 движется поперек потока A.
Если на крыле 2 установлен закрылок 7, то и он изменяет свое угловое положение аналогично описанному выше, но по направлению противоположному углу γ отклонения крыловидного элемента 5 относительно крыла 2.
Изменение углового положения крыловидного элемента 5 относительно крыла 2 происходит следующем образом: при переходе ролика 10 с одной дуги на другую коромысло 11 изменяет свое угловое положение и через тягу 12 изменяет положение рычага 13 и жестко связанного с ним рычага 14. В результате чего через тягу 18 перемещается ползун 16 на кулисе 15 и через тягу 19 изменяется положение рычага 20, а через систему рычагов 21 устанавливается новое положение крыловидного элемента 5 относительно крыла 2.
Сохранение углового положения крыловидного элемента 5 относительно крыла 2 при движении последнего по круговой орбите 3 на дугах "ас", "fm", "de" и "nk" и при повороте его относительно стержня 4 в следствие изменения угла ϕ вектора V на круговой орбите 3 осуществляется следующим образом: при повороте крыла 2 относительно стержня 4 точка Z также поворачивается и через тягу 23 перемещает ползун 17 по кулисе 15. Если плечи OO-Z и OO-S равные и длины тяг 22 и 23 одинаковые, то кулиса 15 всегда занимает положение биссектрисы угла Z-OO-S. С другой стороны, при движении кулисы 15 по ней перемещается ползун 16, связанный тягой 18 с плечом 14 двуплечего рычага. В результате перемещения ползуна 16 через тягу 19 изменяет свое положение рычаг 20. Если плечи рычагов 14 и 20 равны и длины тяг 18 и 19 одинаковые, то рычаг 20 сохраняет свое положение относительно крыла 2.
Т. о. на дугах "ас", "fm", "de" и "nk" крыловидный элемент 5 сохраняет свое установленное угловое положение относительно крыла 2 вне зависимости от углового положения хорды b крыла 2.
Равенство плеч OO-Z и OO-S, длин тяг 22 и 23, а также плеч рычагов 14 и 20 и длин тяг 18 и 19 необязательно и приведено в описании исключительно для простоты понимания работы привода. Следует иметь в виду, что в пропорциональности длин рычагов и тяг возможны и другие варианты конкретного выполнения, необходимо только, чтобы на дугах "ac", "fm", "de" и "nk" крыловидный элемент 5 сохранял свое установленное угловое положение относительно крыла 2 вне зависимости от углового положения хорды b крыла 2.
Патентуемый способ преобразования кинетической энергии текучей среды во вращательное движение крыла и установка для его осуществления могут быть успешно применены при использовании таких возобновляемых источников энергии, какими являются энергия ветра и естественное течение рек, морей, океанов и т.п.
Впервые в мире создано устройство, использующее преимущества нестационарного режима обтекания крыла, что дает реальную возможность снимать значительно большую (в несколько раз !) полезную нагрузку с единицы площади рабочего органа (крыла).
Использование заявляемого способа дает значительную экономию энергетических ресурсов.
Особенно важное значение приобретает использование заявляемой установки на равнинных реках, имеющих невысокую скорость течения, где в настоящее время без строительства плотин не могут быть использованы современные гидротурбины.
В тоже время высокая эффективность устройств, использующих нестационарный режим обтекания крыла, позволяет создавать экономически целесообразные установки при скоростях течения 0,2-0,5 м/с.
Установки могут работать также подо льдом.
Способ, как и установки его реализующие - универсальны, так как в их могут применяться без какой-либо доработки широко распространенные в настоящее время электрогенераторы и центробежные насосы.
Особо важное значение имеет тот факт, что установки экологически чистые, т. к. абсолютно отсутствуют отходы, засоряющие окружающую среду. Вращение крыла, вызванное малоскоростным потоком, имеет настолько низкий уровень шумов, что не оказывает никакого воздействия на окружающую флору и фауну.
Изобретение относится к области нетрадиционной энергетики и может быть использовано как источник электрической, тепловой и механической энергии в гидро- и ветроустановках. Технический результат, заключающийся в значительном повышении эффективности преобразования кинетической энергии текучей среды в другие виды энергии, обеспечивается тем, что в способе преобразования кинетической энергии текучей среды во вращательное движение крыла в результате действия на крыло (2) гидродинамической силы (R) оно движется по круговой орбите (3), ось (1) которой перпендикулярна направлению движения потока (А) текучей среды, в которую оно помещено, а собственная продольная ось (OO) крыла (2) параллельна оси (1), при этом движении крыла (2) по дуге круговой орбиты (3), обращенной к потоку (А) текучей среды, величину угла (α) атаки крыла (2) выдерживают постоянной с одним знаком, а при движении крыла (2) по противоположной дуге круговой орбиты (3) знак постоянной величины угла (α) атаки крыла (2) изменяют также на противоположный, а на дуге круговой орбиты (3), на которой крыло (2) движется против направления движения потока (А) текучей среды, и на дуге круговой орбиты (3), на которой крыло (2) движется по направлению движения этого потока (А), значение угла (α) атаки устанавливают равным нулю, а в установке для преобразования кинетической энергии текучей среды во вращательное движение крыла, содержащей неподвижную ось (1), установленную в потоке (А) текучей среды перпендикулярно направлению его движения, крыло (2), продольная ось (OO) которого параллельна неподвижной оси (1), шарнирно связанное с этой неподвижной осью (1) с помощью по меньшей мере одного стержня (4), причем крыло (2) снабжено устройством управления его углом атаки, выполненным в виде крыловидного элемента (5), снабженного собственным приводом (6) для управления его угловым положением относительно крыла (2), который обеспечивает угол (α) атаки крыла (2) при его движении по дуге круговой орбиты (3), обращенной к потоку (А) текучей среды, постоянным с одним знаком, по противоположной дуге - с обратным знаком, а при переходе крыла (2) с одной дуги на другую - равным нулю. 2 с. и 7 з.п. ф-лы, 6 ил.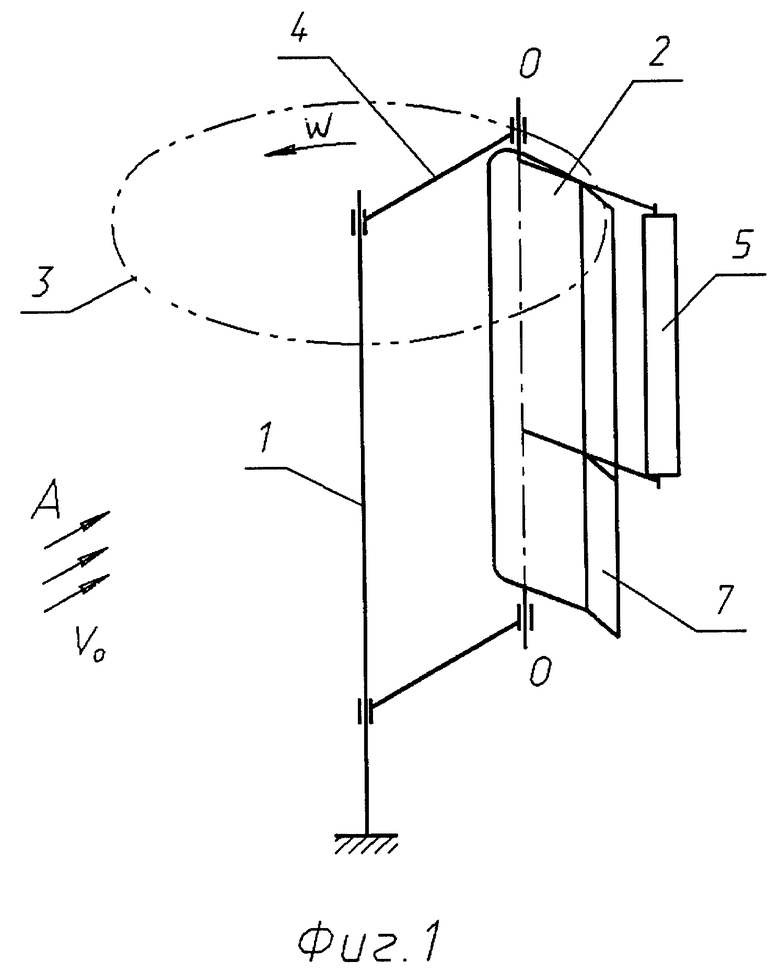
| Огнетушитель | 0 |
|
SU91A1 |
| Рабочее колесо карусельного ветродвигателя | 1983 |
|
SU1134772A1 |
| Ветроколесо | 1985 |
|
SU1281740A1 |
| Ветродвигатель | 1986 |
|
SU1364772A1 |
| DE 3616350 A1, 19.11.87 | |||
| DE 4136956 A1, 13.05.93 | |||
| Приспособление к резьбонакатному станку для удержания заготовок | 1979 |
|
SU860930A1 |

