Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу наблюдения за движущимся телом, подвергаемым колебанию или т.п.
Уровень техники
[0002] Традиционно, когда изображение объекта (далее в данном документе "движущегося тела"), который движется по предварительно определенному физическому закону (например, с постоянной скоростью), захватывается в качестве объекта наблюдения посредством устройства, такого как CCD–камера, трудно находить движущееся тело, так как движущееся тело скрыто в фоновом шуме, например, если движущееся тело находится на дальнем расстоянии или является небольшим, или если яркость движущегося тела является слабой. В частности, так как скорость движущегося тела является неизвестной, невозможно изменять ориентацию камеры в соответствии с движущимся телом, даже если выполняется длинная экспозиция. Следовательно, размытость из–за движения движущегося тела возникает в поле обзора, так что изображение движущегося тела не может быть получено.
[0003] В отношении вышеописанной проблемы патентная литература 1 предлагает способ обнаружения движущегося тела, который устраняет шум с помощью изображений полученных во временной последовательности. Этот способ использует множество изображений, полученных с постоянным интервалом, и выполняет следующие процессы для каждой последовательности последовательных изображений. (a) Предположим, что движущееся тело выполняет равномерное движение с некоторой скоростью, изображения сдвигаются с предполагаемой скоростью и накладываются друг на друга, слегка яркий фрагмент, который является обычным для данных в одной и той же позиции, обнаруживается, и S/N–соотношение (соотношение сигнал–шум) улучшается. (b) Предполагаемая скорость изменяется во всем ожидаемом диапазоне скорости движущегося тела, и процесс (a), описанный выше, повторяется. Скорость и позиция, в которой яркая точка обнаруживается, получается в качестве результата обнаружения. (c) Из результатов, полученных посредством процессов (a) и (b) для каждой последовательности изображений, те, которые согласуются друг с другом (для которых позиции и скорости не являются прерываемыми), объединяются в качестве одного и того же движущегося тела.
Список ссылок
Патентная литература
[0004] Патентная литература 1: Японская выложенная патентная заявка № 2014–51211
Сущность изобретения
Техническая проблема
[0005] Способ обнаружения движущегося тела в патентной литературе 1, описанный выше, использует так называемый способ наложения и может обнаруживать позицию движущегося тела с помощью ряда изображений. Однако, этот способ не может распознавать траекторию или поведение движущегося тела. Например, даже если N изображений используются в способе наложения, только позиция движущегося тела в n–ом (n<N) изображении может быть обнаружена, а позиция движущегося тела в каждом из оставшихся (N–1) изображений не может быть обнаружена. Следовательно, использование способа наложения предоставляет только очень скудную информацию с точки зрения времени.
[0006] Настоящее изобретение было выполнено в виду проблем, описанных выше, и задачей настоящего изобретения является предоставление способа наблюдения за движущимся телом, который может точно обнаруживать движущееся тело с помощью способа наложения.
Решение проблемы
[0007] Аспект настоящего изобретения является способом наблюдения за движущимся телом, содержащим: получение изображений временной последовательности, захватываемых с предварительно определенным временным интервалом; получение расчетной позиции движущегося тела в изображениях временной последовательности на основе расчетного движения движущегося тела; извлечение изображений, каждое включает в себя расчетную позицию движущегося тела, из множества изображений изображений временной последовательности, в качестве извлеченного изображения; формирование шаблонного изображения посредством наложения извлеченных изображений таким образом, что контрольные точки движущегося тела в извлеченных изображениях совпадают друг с другом; и идентификацию позиции движущегося тела, по меньшей мере, в одном изображении изображений временной последовательности, посредством выполнения сопоставления с шаблоном с помощью шаблонного изображения, по меньшей мере, для одного изображения из изображений временной последовательности.
[0008] Каждая из контрольных точек движущегося тела в наложении извлеченных изображений может быть расчетной позицией движущегося тела.
[0009] Каждое пиксельное значение в шаблонном изображении может быть задано в любое значение из среднего пиксельного значения, медианы и моды соответствующего пиксела в извлеченных изображениях.
[0010] Способ наблюдения за движущимся телом может дополнительно содержать бинаризацию каждого пиксельного значения изображениях временной последовательности или извлеченных изображениях; и вычисление центра тяжести движущегося тела в каждом из бинаризированных изображений временной последовательности или каждом из бинаризированных извлеченных изображений. В этом случае, каждая из контрольных точек движущегося тела в наложении извлеченных изображений может быть центром тяжести движущегося тела.
[0011] Способ наблюдения за движущимся телом может дополнительно содержать бинаризацию каждого пиксельного значения в изображениях временной последовательности или извлеченных изображениях; и вычисление позиции с максимальной яркостью для движущегося тела посредством аппроксимации нормальной функции к двум одномерным распределениям, полученным посредством интегрирования пиксельного распределения для движущегося тела в каждом из бинаризированных извлеченных изображений в предварительно определенных двух направлениях. В этом случае, каждая из контрольных точек движущегося тела в наложении извлеченных изображений может быть позицией с максимальной яркостью для движущегося тела.
[0012] Движущееся тело может быть мусором на земной орбите или микроорганизмом в жидкости.
Полезные результаты изобретения
[0013] Согласно настоящему изобретению, является возможным предоставлять способ наблюдения за движущимся телом, который может точно обнаруживать движущееся тело с помощью способа наложения.
Краткое описание чертежей
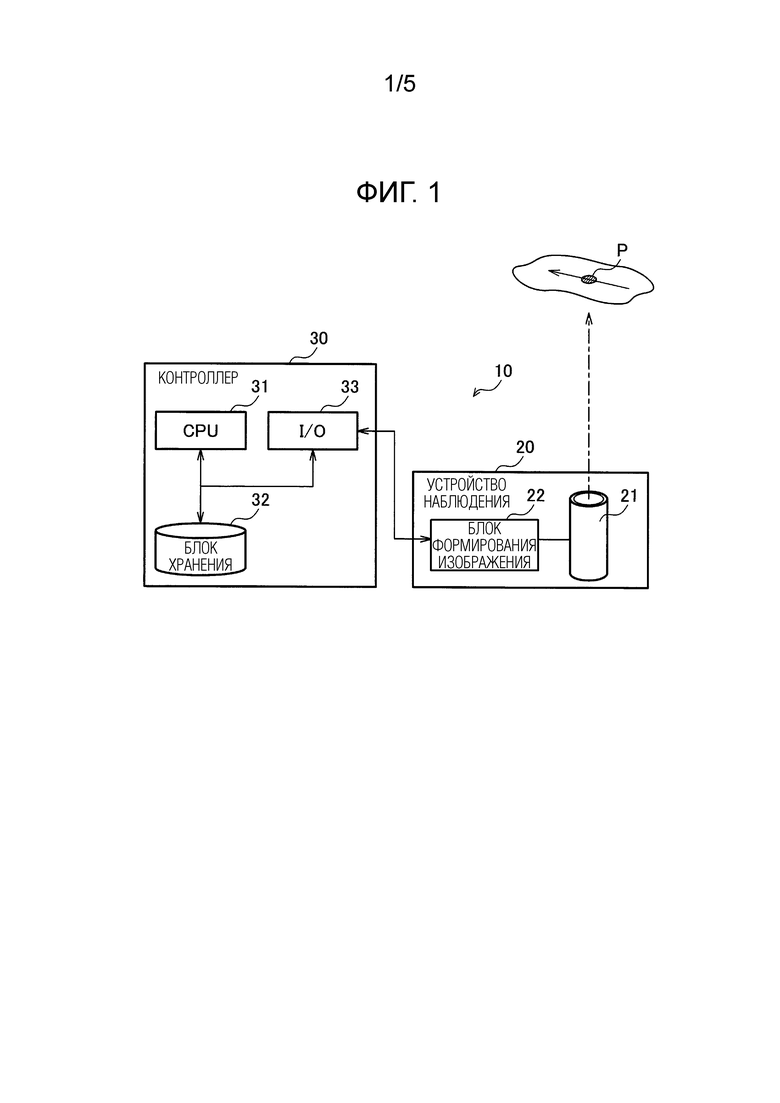
[0014] Фиг. 1 – это блок–схема устройства наблюдения за движущимся телом согласно варианту осуществления настоящего изобретения.
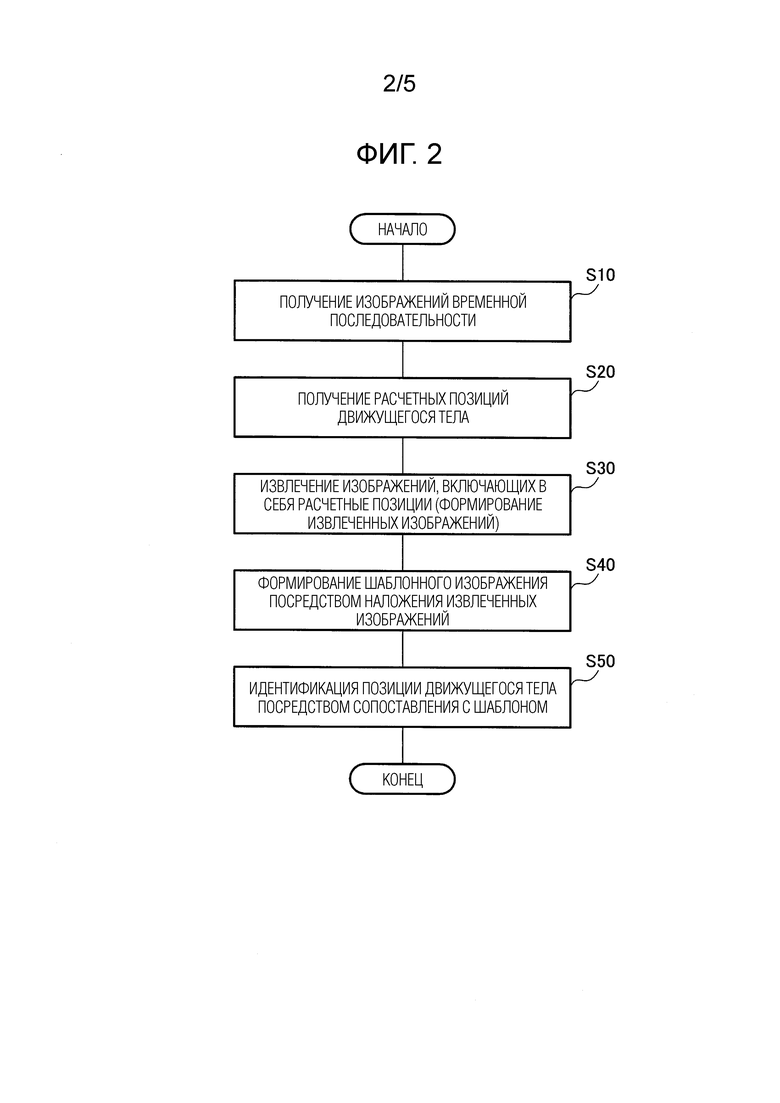
Фиг. 2 – это блок–схема последовательности операций способа наблюдения за движущимся телом согласно варианту осуществления.
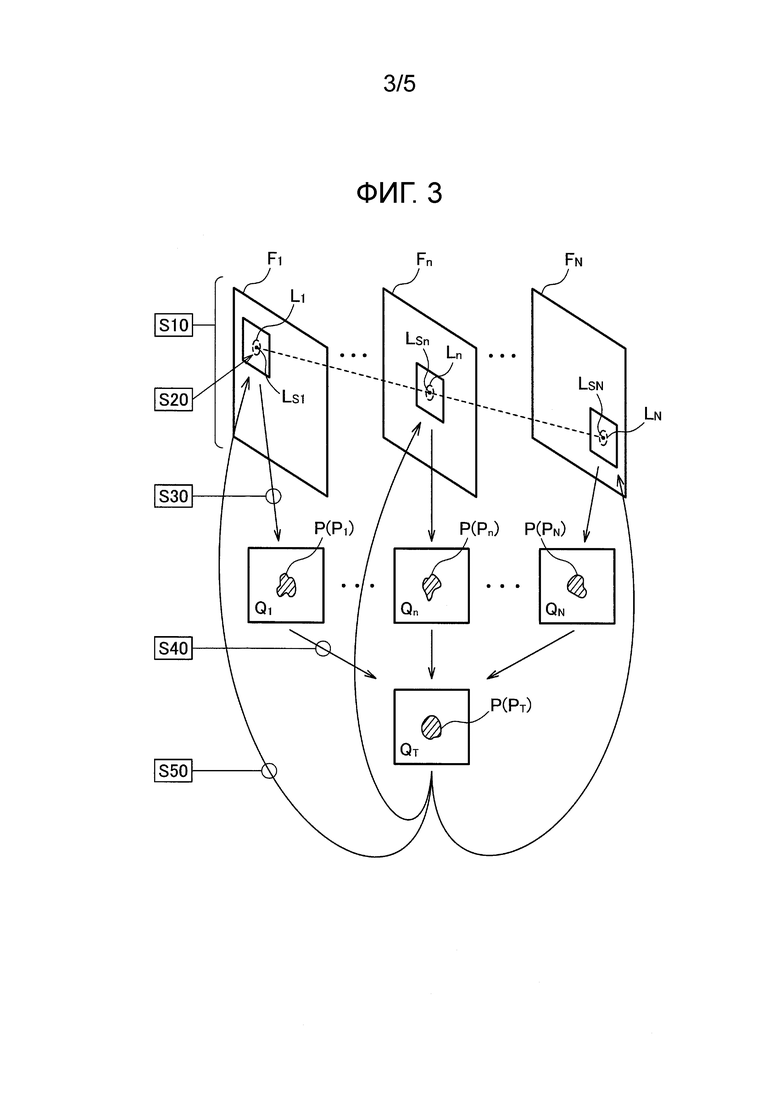
Фиг. 3 – это пояснительная схема каждого этапа способа наблюдения за движущимся телом согласно варианту осуществления.
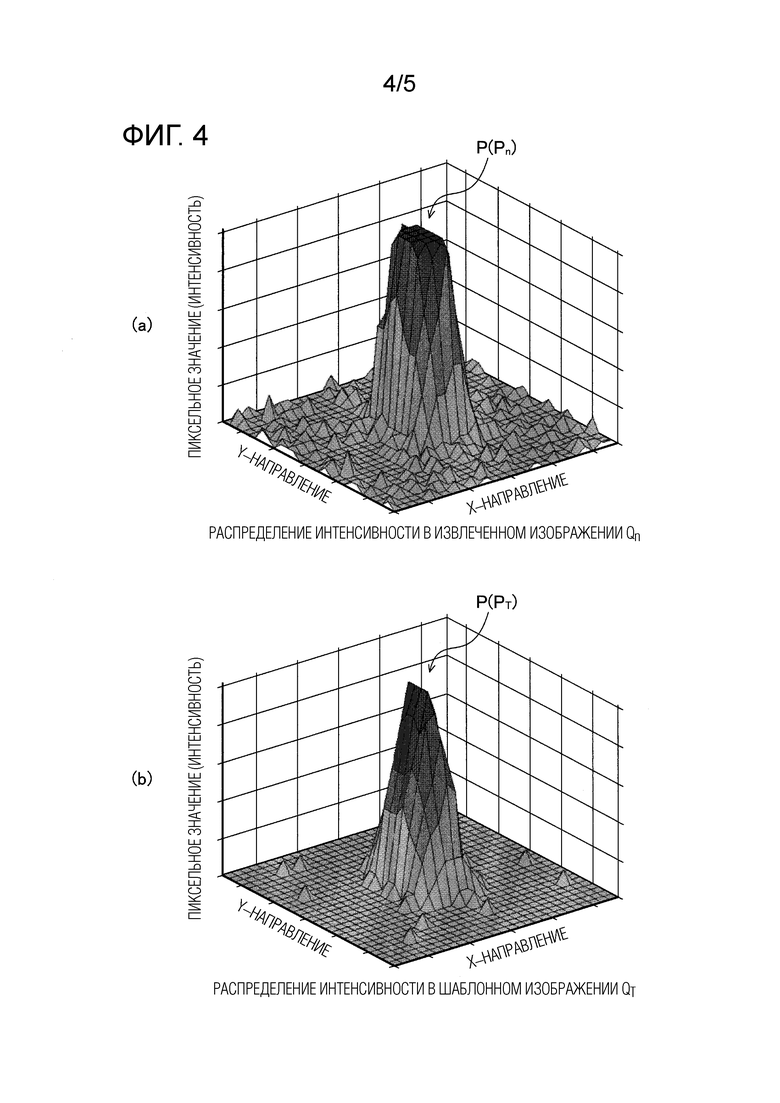
Фиг. 4 являются, соответственно, примером распределения интенсивности в изображении, полученном посредством способа наблюдения за движущимся телом согласно варианту осуществления, где фиг. 4(a) иллюстрирует распределение интенсивности в извлеченном изображении, а фиг. 4(b) иллюстрирует распределение интенсивности в шаблонном изображении QT.
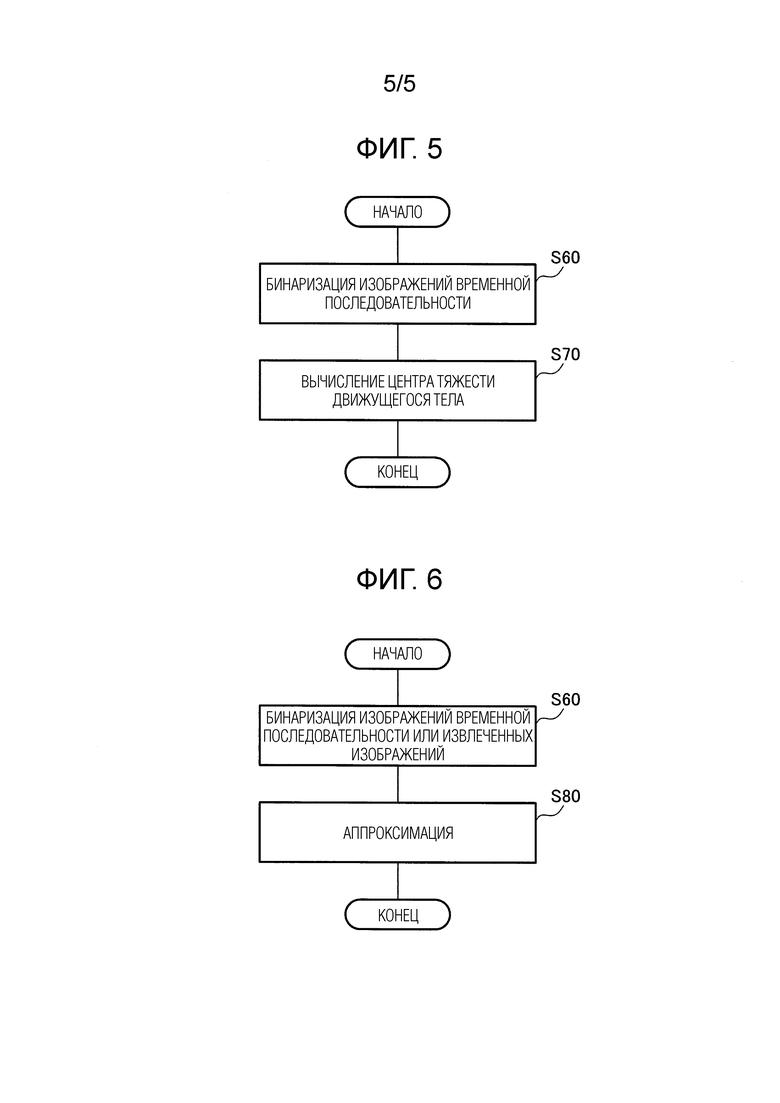
Фиг. 5 – это блок–схема последовательности операций согласно первой модификации варианта осуществления.
Фиг. 6 – это блок–схема последовательности операций согласно второй модификации варианта осуществления.
Описание вариантов осуществления
[0015] Вариант осуществления настоящего изобретения будет описан ниже со ссылкой на сопровождающие чертежи. Фиг. 1 – это блок–схема устройства наблюдения за движущимся телом согласно настоящему варианту осуществления. Как иллюстрировано на фиг. 1, устройство 10 наблюдения за движущимся телом включает в себя устройство 20 наблюдения и контроллер 30. Устройство 20 наблюдения включает в себя оптическую систему 21 и блок 22 формирования изображения. Оптическая система 21 формирует оптическое изображение, включающее в себя движущееся тело P, которое является объектом наблюдения, и является телескопом или микроскопом, например. Блок 22 формирования изображения получает оптическое изображение, сформированное посредством оптической системы 21, в качестве данных изображения и является CCD–камерой, например. Контроллер 30 включает в себя CPU (процессор) 31, блок 32 хранения и блок ввода/вывода (I/O) 33. CPU 31 выполняет различные типы вычислений с помощью программы и данных, сохраненных в блоке 32 хранения, например. Блок 32 хранения хранит в себе программу согласно настоящему варианту осуществления и различные типы данных и конфигурируется посредством полупроводниковой памяти, накопителя на жестком диске (HDD) или т.п. Например, блок 32 хранения также хранит в себе данные изображения, отправленные от устройства 20 наблюдения. Блок 33 ввода/вывода выполняет обмен данными, инструкцией и т.п. с внешним устройством и соединяется с блоком 22 формирования изображения устройства 20 наблюдения в настоящем варианте осуществления. Следовательно, данные изображения, полученные посредством блока 22 формирования изображения, сохраняются в блоке 32 хранения посредством обмена данными между блоком 22 формирования изображения и блоком 33 ввода/вывода и используются для вычисления посредством CPU 31.
[0016] Фиг. 2 – это блок–схема последовательности операций способа наблюдения за движущимся телом согласно настоящему варианту осуществления. Фиг. 3 – это пояснительная схема каждого этапа способа наблюдения за движущимся телом согласно настоящему варианту осуществления. Как иллюстрировано на фиг. 2 и 3, способ наблюдения за движущимся телом согласно настоящему варианту осуществления включает в себя этап получения изображения (этап S10), этап оценки позиции (этап S20), этап извлечения изображения (этап S30), этап формирования шаблона (этап S40) и этап идентификации позиции (этап S50).
[0017] Движущееся тело P, которое является объектом наблюдения, является мусором на земной орбите, например. На земной орбите движутся искусственные спутники с различными целями, например, военный спутник, спутник связи, научный спутник, спутник наблюдения и навигационный спутник. Когда эти искусственные спутники становятся более нефункционирующими вследствие поломки, или окончания их ролей и окончания их срока службы, они остаются на орбите, как они есть, чтобы становиться мусором (также называемым "космической пылью" или "космическим мусором"), которые движутся по орбите во многих случаях. Дополнительно, остатки ракет или т.п., используемых для запуска искусственных спутников или т.п., также остаются на орбите в качестве мусора.
[0018] В настоящее время, количество мусора, которое вращается на орбите Земли, достигает нескольких тысяч единиц или более и входит в стадию саморазмножения, в которой количество мусора увеличивается за счет естественного столкновения. Имеется вероятность того, что этот мусор сталкивается с искусственным спутником, который используется, когда спутник движется по орбите, или искусственным спутником, который запускается, и, следовательно, требуется способ наблюдения с высокой точностью.
[0019] Объект наблюдения в настоящем варианте осуществления не ограничивается мусором, описанным выше. Т.е., способ наблюдения за движущимся телом может быть применен к объекту с неустойчивостью формы в изображениях, получаемых с предварительно определенным временным интервалом, в качестве объекта наблюдения. Следовательно, движущееся тело P может быть микроорганизмом в жидкости, такой как химический агент (например, неподвижным микроорганизмом). В этом случае, микроскоп используется в качестве оптической системы 21. Неустойчивость вызывается вследствие того, что движущееся тело находится на дальнем расстоянии, размер движущегося тела является небольшим, или яркость движущегося тела является слабой, например.
[0020] Этап получения изображения (этап S10) получает множество (например, N) изображений Fn временной последовательности (n=1 до N), включающих в себя движущееся тело P, которые захватываются с предварительно определенным временным интервалом. В настоящем варианте осуществления устройство 20 наблюдения для устройства 10 наблюдения за движущимся телом захватывает множество (например, N) изображений, включающих в себя движущееся тело P, с предварительно определенным временным интервалом и вводит данные изображений для этих изображений в контроллер 30 (блок 32 хранения) устройства 10 наблюдения за движущимся телом в качестве изображений F1 по FN временной последовательности.
[0021] После того как каждое изображение Fn временной последовательности получено, процесс удаления яркого пиксела, такого как звезда, который может вызывать ложное обнаружение, может быть выполнен для каждого изображения Fn временной последовательности. Например, является возможным удалять шумовую составляющую звезды, включенную в сигнал изображения, посредством преобразования изображений в соответствии с направлением движения и интервалом перемещения звезды, наложения изображений друг на друга и вычитания пиксельных значений одних и тех же пикселов, которые накладываются друг на друга.
[0022] Этап расчета позиции (этап S20) получает расчетные позиции Ln (n=1 по N) движущегося тела P в изображениях Fn временной последовательности (n=1 по N) на основе расчетного движения движущегося тела P. Например, предположим, что движение движущегося тела P является равномерным линейным движением, расчетное движение может быть представлено следующей формулой 1.
 … Формула (1)
… Формула (1)
Здесь, PosX(k) представляет координату X расчетной позиции Lk движущегося тела P в изображении Fk временной последовательности (с номером кадра k), PosY(k) представляет координату Y расчетной позиции Lk движущегося тела P в изображении Fk временной последовательности, VelX представляет составляющую X–направления скорости движущегося тела P в изображении Fn временной последовательности, VelY представляет составляющую Y–направления скорости движущегося тела P в изображении Fn временной последовательности, а k представляет положительное целое число, которое равно или меньше N и не является n. PosX(n) и PosY(n) являются X–координатой и Y–координатой расчетной позиции Ln движущегося тела P в изображении Fn временной последовательности, соответственно, и выбираются из любого изображения из полученных изображений временной последовательности. Расчетная позиция Ln может быть найдена по ссылке из истории наблюдения за движущимся телом P, сохраненной в блоке 32 хранения, или может быть вычислена снова вместе с расчетной скоростью движения движущегося тела P. В последнем случае, например, в то время как расчетная скорость движения движущегося тела P последовательно изменяется в диапазоне (–VelX, –VelY) до (VelX, VelY), изображения накладываются друг на друга. Скорость во время, когда степень совпадения между кандидатами для движущегося тела P в изображениях является высокой, задается в качестве расчетной скорости движения, и кандидаты задаются в качестве движущегося тела P.
[0023] Предположим, что движущееся тело P выполняет круговое движение, его расчетное движение представляется следующей формулой 2 или 3. Эти круговые движения, каждое, представляют круговую орбиту с небольшим радиусом изгиба, который может быть аппроксимирован посредством линии либо в X–направлении, либо в Y–направлении. Здесь, A представляет X–координату центра круговой орбиты, описанной выше, а B представляет Y–координату центра круговой орбиты, описанной выше. Формула 2 представляет случай, когда VelX ≤ VelY, а формула 3 представляет случай, когда VelX > VelY.

[0024] Расчетное движение движущегося тела P не ограничивается равномерным линейным движением или круговым движением, описанным выше, и может быть изменено на любое движение, чтобы соответствовать объекту наблюдения.
[0025] Этап извлечения изображения (этап S30) извлекает (обрезает) изображение, которое включает в себя расчетную позицию Ln движущегося тела P, из изображений Fn временной последовательности (n=1 до N) в качестве извлеченного изображения Qn. Извлеченное изображение Qn может иметь любой размер, пока он меньше размера изображений Fn временной последовательности. Число изображений Fn временной последовательности, которые являются объектами извлечения, является любым множественным числом. Когда это число увеличивается, достоверность формы движущегося тела P в шаблонном изображении QT, описанном позже, увеличивается. С другой стороны, когда это число увеличивается, темп обработки контроллера 30 снижается. Следовательно, желательно, чтобы число изображений временной последовательности, используемых для извлечения, было подходящим значением, определенным с учетом этих обстоятельств. В настоящем варианте осуществления, для удобства описания, извлеченное изображение Qn предполагается извлекать из всех полученных N изображений.
[0026] Этап формирования шаблона (этап S40) формирует шаблонное изображение QT посредством наложения друг на друга (наложения) извлеченных изображений Qn таким образом, что контрольные точки движущегося тела P совпадают друг с другом. Каждая контрольная точка является расчетной позицией Ln на извлеченном изображении Qn, например. Расчетная позиция Ln уже была получена на этапе расчета позиции (этап S20). Следовательно, контроллер 30 может формировать шаблонное изображение QT без выполнения вновь процесса вычисления. Шаблонное изображение QT формируется посредством вычисления средних значений для пиксельных значений соответствующих извлеченных изображений Qn. Например, в случае, когда извлеченное изображение Qn имеет размер Mx×My, каждое пиксельное значение T(i, j) в шаблонном изображении QT вычисляется по следующей формуле 4.
 … Формула (4)
… Формула (4)
Здесь, TQn(i, j) является пиксельным значением в позиции (i, j) в извлеченном изображении Qn. Т.е., распределение интенсивности пикселов, которые представляют движущееся тело P в шаблонном изображении QT (т.е., движущееся тело PT), является средним значением распределений интенсивности пикселов, которые представляют движущееся тело P в извлеченных изображениях Q1–QN (т.е., движущиеся тела P1–PN).
[0027] Как иллюстрировано на фиг. 3, формы движущихся тел P1–PN в извлеченных изображениях Q1–QN всегда изменяются посредством воздействия колебания, вызванного атмосферой или т.п. Шаблонное изображение QT представляет состояние, когда такое изменение формы пресекается. Т.е., движущееся тело PT в шаблонном изображении QT имеет "среднюю" форму, полученную из движущихся тел P1–PN в извлеченных изображениях Q1–QN. Например, отдельные изменения формы, которые возникают в извлеченных изображениях Q1–QN, усредняются в шаблонном изображении QT, чтобы выглядеть как "размытость", которая имеет низкую интенсивность в профиле движущегося тела PT. Между тем, форма, общая для движущихся тел P1–PN, остается в шаблонном изображении QT, как она есть. Другими словами, движущееся тело PT включает в себя яркий фрагмент, который представляет форму, общую для движущихся тел P1–PN, и темный фрагмент, который представляет форму, которая не является общей для движущихся тел P1–PN. Следовательно, движущееся тело PT может иметь форму, близкую к оригинальной форме движущегося тела P, так что шаблонное изображение QT имеет высокую достоверность в качестве шаблона.
[0028] Как описано выше, каждое пиксельное значение в шаблонном изображении QT является средним значением для пиксельных значений в извлеченных изображениях Q1–QN. Следовательно, случайный шум, который возникает в каждом из извлеченных изображений Q1–QN, уменьшается в шаблонном изображении QT, так что S/N–соотношение (соотношение сигнал–шум) улучшается. Фиг. 4(a) иллюстрирует распределение интенсивности в извлеченном изображении Qn, а фиг. 4(b) иллюстрирует распределение интенсивности в шаблонном изображении QT. Фрагменты высокой интенсивности, которые наблюдаются в центрах распределений интенсивности на фиг. 4(a) и 4(b), представляют движущееся тело Pn и движущееся тело PT, соответственно. Как иллюстрировано на фиг. 4(a), случайный шум возникает вокруг движущегося тела Pn. Между тем, как иллюстрировано на фиг. 4(b), случайный шум, наблюдаемый на фиг. 4(a), значительно уменьшается вокруг движущегося тела PT. Дополнительно, вследствие уменьшения случайного шума, вариативность в интенсивностях, которые представляют профиль движущегося тела PT, уменьшается по сравнению с вариативностью в интенсивностях, которые представляют профиль движущегося тела Pn. Это уменьшение также способствует высокой достоверности в качестве шаблона.
[0029] Этап идентификации позиции (этап S50) идентифицирует позицию движущегося тела P в изображении временной последовательности, к которому применяется сопоставление с шаблоном, посредством выполнения сопоставления с шаблоном с помощью шаблонного изображения QT, по меньшей мере, для одного из изображений F1–FN временной последовательности. Это сопоставление с шаблоном выполняется около расчетной позиции Ln (в предварительно определенной области, включающей в себя расчетную позицию Ln), полученной на этапе оценки позиции (этап S20). Изображение, к которому сопоставление с шаблоном применяется, может быть извлеченным изображением Qn или изображением, включающим в себя расчетную позицию Ln, которая вновь извлекается (обрезается) из изображений Fn временной последовательности. В обоих случаях, пиксельные значения, которые представляют движущееся тело P (Pn) и его окружающую область, являются одинаковыми, и, следовательно, одинаковый результат получается. В последующем описании предполагается, что изображение Fn временной последовательности используется в качестве изображения, к которому сопоставление с шаблоном применяется для удобства описаний.
[0030] В сопоставлении с шаблоном степень сходства между шаблонным изображением QT и изображением Fn временной последовательности, может быть оценена посредством значения нормализованной кросс–корреляции RZNCC с нулевым средним, представленной формулой 5, например. Среднее пиксельное значение в шаблонном изображении QT в формуле 5 получается посредством формулы 6, а среднее пиксельное значение в изображении Fn временной последовательности (или изображении, извлеченном для сопоставления с шаблоном) получается посредством формулы 7.

 … Формула (6)
… Формула (6)
 … Формула (7)
… Формула (7)
Здесь, Mx и My являются количествами пикселов, которые соответственно представляют ширину и высоту шаблонного изображения QT. Nx и Ny являются количествами пикселов, которые соответственно представляют ширину и высоту изображения Fn временной последовательности. (i, j) являются координатами в каждом изображении (где 0≤i≤Mx–1, 0≤j≤My–1). T(i, j) является пиксельным значением (интенсивностью, значением яркости) в шаблонном изображении QT. T– (в формулах, T и черта над символом (полоса) над T) является средним пиксельным значением (средней интенсивностью, средним значением яркости) в шаблонном изображении QT. I(i, j) является пиксельным значением (интенсивностью, значением яркости) в изображении Fn временной последовательности. I– (в выражении, I и черта над символом (полоса) над I) является средним пиксельным значением (средней интенсивностью, средним значением яркости) в изображении Fn временной последовательности.
[0031] Посредством этого сопоставления с шаблоном позиция движущегося тела Pn в изображении Fn временной последовательности, которая является наиболее приближенной к шаблонному изображению QT, идентифицируется в качестве правильной позиции LSn (n=1 по N) движущегося тела P в изображении Fn временной последовательности. Другими словами, расчетная позиция Ln движущегося тела Pn в изображении Fn временной последовательности исправляется в идентифицированную позицию LSn посредством сопоставления с шаблоном. Идентифицированная позиция LSn движущегося тела Pn сохраняется в блоке 32 хранения (см. фиг. 1).
[0032] В настоящем варианте осуществления шаблонное изображение QT используется в качестве эталона для сравнения в сопоставлении с шаблоном. Как описано выше, шаблонное изображение QT формируется на основе так называемого способа наложения друг на друга (способа наложения) из извлеченных изображений Qn среди изображений Fn временной последовательности. Следовательно, даже если форма движущегося тела Pn, которая является объектом сравнения, всегда изменяется вследствие влияния колебания или т.п., это изменение едва ли отражается на форме движущегося тела PT в шаблонном изображении QT, тогда как это изменение сильно отражается на форме, которая является общей для движущихся тел Pn. Соответственно, шаблонное изображение QT имеет высокую достоверность в качестве шаблона, и является возможным точно идентифицировать позицию LSn движущегося тела Pn в изображении Fn временной последовательности. Т.е., согласно настоящему варианту осуществления, движущееся тело P может быть обнаружено точно посредством способа наложения друг на друга.
[0033] Как описано выше, согласно настоящему варианту осуществления, позиция LSn движущегося тела Pn идентифицируется (корректируется) в каждом из изображений Fn временной последовательности. Следовательно, посредством соединения позиций движущегося тела P в соответствующих изображениях друг с другом, является возможным распознавать траекторию или поведение движущегося тела P, которое является объектом наблюдения. Т.е., даже если используется способ наложения, может быть получена детальная информация относительно позиции движущегося тела P в течение времени наблюдения.
[0034] Каждое пиксельное значение в шаблонном изображении QT может быть медианой или модой интенсивностей (пиксельных значений) соответствующего пиксела в извлеченных изображениях Qn, используемых для формирования шаблонного изображения QT.
[0035] Способ наблюдения за движущимся телом согласно настоящему варианту осуществления может включать в себя следующий процесс. Фиг. 5 – это блок–схема последовательности операций согласно первой модификации настоящего варианта осуществления. Как иллюстрировано на фиг. 5, способ наблюдения за движущимся телом может включать в себя этап бинаризации (этап S60) и этап вычисления центра тяжести (этап S70). Каждый из этапов выполняется посредством устройства 10 наблюдения за движущимся телом, иллюстрированного на фиг. 1.
[0036] Этап бинаризации (этап S60) бинаризирует каждое пиксельное значение в изображениях Fn временной последовательности (n=1 по N) или извлеченных изображениях Qn (n=1 по N) с помощью предварительно определенного порогового значения. В качестве порогового значения значение, которое является предварительно определенным кратным для значения фонового шума, полученного из истории наблюдения, например, может быть применено. Этап бинаризации (этап S60) получает бинаризированные извлеченные изображения Qn. Этап вычисления центра тяжести (этап S70) вычисляет центр тяжести движущегося тела Pn в каждом изображении Fn временной последовательности или каждом извлеченном изображении Qn, которое было бинаризировано.
[0037] Этап формирования шаблона (этап S40) в первой модификации использует центры тяжести, полученные на этап вычисления центра тяжести (этап S70), в качестве контрольных точек движущихся тел Pn, когда извлеченные изображения Qn накладываются друг на друга. Т.е., на этапе формирования шаблона (этап S4), извлеченные изображения Qn накладываются друг на друга, чтобы вынуждать центры тяжести совпадать друг с другом, тем самым, формируя шаблонное изображение QT. После этого, этап идентификации позиции (этап S50) выполняется с помощью каждого из бинаризированных изображений.
[0038] Фиг. 6 – это блок–схема последовательности операций согласно второй модификации настоящего варианта осуществления. Как иллюстрировано на фиг. 6, способ наблюдения за движущимся телом может включать в себя этап бинаризации (этап S60) согласно первой модификации и этапу аппроксимации (этап S80). Как и в первой модификации, каждый из этапов согласно второй модификации также выполняется посредством устройства 10 наблюдения за движущимся телом, иллюстрированного на фиг. 1.
[0039] Как описано выше, извлеченные изображения Qn, которые были бинаризированы, получаются на этапе бинаризации (этап S60). Этап аппроксимации (этап S80) подгоняет нормальную функцию к двум одномерным распределениям, полученным посредством интегрирования пиксельного распределения движущегося тела Pn в каждом извлеченном изображении Qn, которое было бинаризировано в предварительно определенных двух направлениях. Соответственно, позиция с максимальной яркостью движущегося тела Pn (позиция максимальной яркости) вычисляется.
[0040] Посредством этапа бинаризации (этап S60) пикселы в извлеченном изображении Qn классифицируются в пикселы с пиксельным значением, равным 1, которое представляет движущееся тело Pn, и пикселами с пиксельным значением, равным 0, которое представляет фон для движущегося тела Pn. Следовательно, на этапе аппроксимации (этап S80), одномерное распределение в X–направлении, полученное посредством интегрирования двухмерного распределения этих пикселов в Y–направлении, вычисляется, и одномерное распределение в Y–направлении, полученное посредством интегрирования этого двухмерного распределения в X–направлении, также вычисляется. Нормальная функция аппроксимируется к этим двум одномерным распределениям, тем самым, вычисляя позицию с максимальной яркостью для движущегося тела Pn (позицию максимальной яркости).
[0041] Этап формирования шаблона (этап S40) во второй модификации использует позиции максимальной яркости, полученные на этапе аппроксимации (этап S80), в качестве контрольных точек движущихся тел Pn, когда извлеченные изображения Qn накладываются друг на друга. Т.е., на этапе формирования шаблона (этап S40), извлеченные изображения Qn накладываются друг на друга, чтобы вынуждать позиции максимальной яркости совпадать друг с другом, тем самым, формируя шаблонное изображение QT. После этого, этап идентификации позиции (этап S50) выполняется с помощью каждого из бинаризированных изображений.
[0042] Настоящее изобретение не ограничивается вариантом осуществления, описанным выше, и определяется объемом формулы изобретения, и настоящее изобретение включает в себя все виды модификаций с эквивалентными значениями и в рамках описаний в рамках формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2013 |
|
RU2589736C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2597882C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2013 |
|
RU2618927C2 |
| ПРОЕКЦИЯ С ДВОЙНЫМ НАЛОЖЕНИЕМ | 2011 |
|
RU2575981C2 |
| КОДЕР, ДЕКОДЕР, СПОСОБ КОДИРОВАНИЯ И СПОСОБ ДЕКОДИРОВАНИЯ | 2024 |
|
RU2839119C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СВЕТОФОРОВ И СПОСОБ ОБНАРУЖЕНИЯ СВЕТОФОРОВ | 2014 |
|
RU2643861C1 |
| СИСТЕМА И СПОСОБ ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2020 |
|
RU2817290C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2020 |
|
RU2819086C2 |
| Устройство и способ для передачи потока битов | 2020 |
|
RU2830599C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КОДИРОВАНИЯ ВИДЕО | 2024 |
|
RU2831745C1 |
Изобретение относится к способу наблюдения за движущимся телом. Технический результат заключается в обеспечении точного обнаружения движущегося тела с помощью способа наложения. Такой результат достигается тем, что способ наблюдения за движущимся телом включает в себя получение изображений Fn временной последовательности, захватываемых с предварительно определенным временным интервалом (этап S10), получение расчетной позиции Ln движущегося тела P в изображении Fn временной последовательности на основе расчетного движения движущегося тела P (этап S20), извлечение изображения, включающего в себя расчетную позицию Ln движущегося тела P из изображений изображений Fn временной последовательности, в качестве извлеченного изображения Qn (этап S30), формирование шаблонного изображения QT посредством наложения извлеченных изображений Qn таким образом, что контрольные точки движущегося тела P в извлеченных изображениях совпадают друг с другом (этап S40), и идентификацию позиции LSn движущегося тела P в каждом из изображений Fn временной последовательности посредством выполнения сопоставления с шаблоном с помощью шаблонного изображения QT, по меньшей мере, для одного из изображений Fn временной последовательности (этап S50). 5 з.п. ф-лы, 6 ил.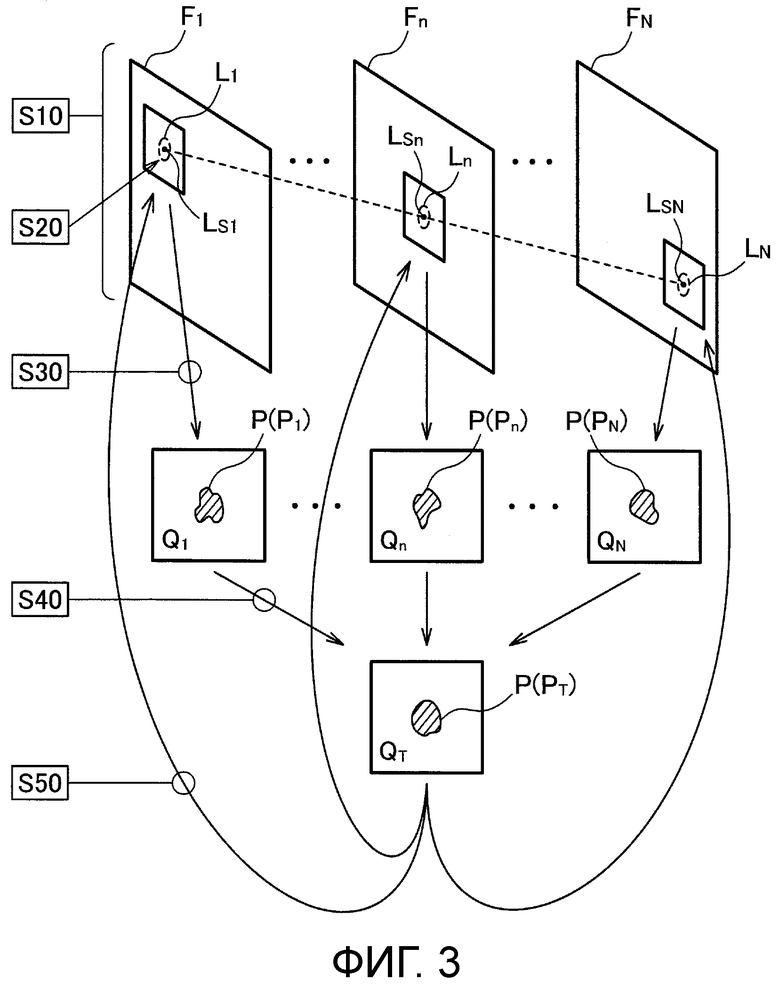
1. Способ наблюдения за движущимся телом, содержащий этапы, на которых:
получают изображения временной последовательности, захватываемые с предварительно определенным временным интервалом;
получают расчетную позицию движущегося тела в каждом из изображений временной последовательности на основе расчетного движения движущегося тела, предположенного заранее;
извлекают изображения, каждое включает в себя расчетную позицию движущегося тела, из множества изображений из изображений временной последовательности, в качестве извлеченных изображений;
формируют шаблонное изображение посредством наложения извлеченных изображений таким образом, что контрольные точки движущегося тела в извлеченных изображениях совпадают друг с другом; и
идентифицируют позицию движущегося тела в по меньшей мере одном изображении из изображений временной последовательности посредством выполнения сопоставления с шаблоном с помощью шаблонного изображения для по меньшей мере одного изображения из изображений временной последовательности.
2. Способ наблюдения за движущимся телом по п. 1, в котором каждая из контрольных точек движущегося тела в наложении извлеченных изображений является расчетной позицией движущегося тела.
3. Способ наблюдения за движущимся телом по п. 2, в котором каждое пиксельное значение в шаблонном изображении устанавливается в любое одно из среднего пиксельного значения, медианы и моды соответствующего пиксела в извлеченных изображениях.
4. Способ наблюдения за движущимся телом по п. 1, дополнительно содержащий этапы, на которых:
бинаризируют каждое пиксельное значение в изображениях временной последовательности или извлеченных изображениях; и
вычисляют центр тяжести движущегося тела в каждом из бинаризированных изображений временной последовательности или в каждом из бинаризированных извлеченных изображений, при этом
каждая из контрольных точек движущегося тела в наложении извлеченных изображений является центром тяжести движущегося тела.
5. Способ наблюдения за движущимся телом по п. 1, дополнительно содержащий этапы, на которых:
бинаризируют каждое пиксельное значение в изображениях временной последовательности или извлеченных изображениях; и
вычисляют позицию максимальной яркости движущегося тела посредством аппроксимации нормальной функции к двум одномерным распределениям, полученным посредством интегрирования пиксельного распределения движущегося тела в каждом из бинаризированных извлеченных изображений в предварительно определенных двух направлениях, при этом
каждая из контрольных точек движущегося тела в наложении извлеченных изображений является позицией максимальной яркости движущегося тела.
6. Способ наблюдения за движущимся телом по п. 1, в котором движущееся тело является мусором на земной орбите или микроорганизмом в жидкости.
| JP 2008113071 A, 15.05.2008 | |||
| СПОСОБ ОБНАРУЖЕНИЯ КОСМИЧЕСКИХ ОБЛОМКОВ | 2011 |
|
RU2536349C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2013 |
|
RU2589736C1 |
| US 20150235380 A1, 20.08.2015. | |||

