Область техники
Изобретение относится к области радиотехники и предназначено для использования в создаваемом в настоящее время международной организацией КОСПАС-САРСАТ среднеорбитальном сегменте космической системы поиска и спасения терпящих бедствия судов, летательных аппаратов, отдельных людей или групп [1, 2, 3].
Уровень техники
Среднеорбитальный сегмент этой системы имеет существенные преимущества перед эксплуатируемыми в настоящее время низкоорбитальным и геостационарным сегментами - высокую оперативность, глобальность и возможность независимого определения координат терпящих бедствие.
Вместе с тем, этот сегмент имеет и существенный недостаток - большие ошибки определения координат терпящих бедствие при использовании существующих аварийных радиобуев, которыми в настоящее время оснащены более 500 тысяч судов, самолетов, вертолетов и проводится бурное оснащение различных туристических групп, альпинистов, геологов, лесников, охотников и других людей, находящихся и работающих в сложных и опасных условиях. Замена этих буев на новые требует огромных затрат и длительного времени. Большие ошибки определения координат при использовании существующих буев связаны с их узкой полосой частот излучаемых буями сигналов которая не должна быть больше 1,6 кГц, что не позволяет получить хорошую точность измерения псевдодальностей.
Кратковременность (всего 160 мс) излучения буем чистой несущей и существенно худшие геометрические факторы в среднеорбитальном сегменте по равнению с низкоорбитальным не позволяют получить достаточную точность измерения частоты сигнала буя для того, чтобы получить достаточную точность измерения псевдоскорости, при использовании доплеровского метода определения координат.
Раскрытие изобретения
Предлагаемое изобретение позволяет устранить этот недостаток за счет существенного (в 4,5 раза) уменьшения ошибок измерения частоты сигналов посылок радиобуев.
Это позволяет, как показывают расчеты и моделирование, получить требуемую точность определения координат. Ошибка определения координат радиобуя не превышает 5 км с вероятностью 95%, в любой момент времени в любой точке земного шара.
При этом большинстве случаев точность определения координат будет значительно (в 2-3 раза) лучше.
Существенное повышение точности измерения частоты сигналов радиобуев в предлагаемом способе получается за счет использования для измерения частоты всей длительности сигнала посылки радиобуя (440 мс) вместо использования только немодулированной части этой посылки (160 мс).
Технический результат заявленного изобретения заключается в повышении точности измерений частоты сигналов радиобуев.
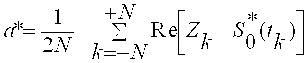
Технический результат достигается тем, способ измерения частоты сигналов посылок радиобуев в космической системе поиска и спасания, отличающийся тем, что измерения частоты сигналов посылок излучаемых радиобуями, ретранслированными спутниками-ретрансляторами и принимаемых наземной станцией, производят с использованием всей длительности сигналов посылок и всей энергии их, для чего на наземной станции усиливают принятые сигналы и переносят их спектр в область нулевых частот, производят их преобразование в цифровой формат, полученные комплексные цифровые отсчеты принятого сигнала 
 - частота сигнала
- частота сигнала 












где 


где




производят комплексное перемножение цифровых отсчетов 


Δ
Также в способе измерения частот сигналов используют суммирование сигналов нескольких посылок того же радиобуя, для чего комплексные цифровые отсчеты обнаруженных, но не достоверных посылок сигналов суммируют с комплексными цифровыми отсчетами других обнаруженных посылок сигналов, частоты и времени прихода 25 бита которых находятся в диапазонах возможных значений для этого радиобуя, после суммирования двух, трех или более посылок сигналов суммарный сигнал используют для получения достоверной информации I(n)посылки радиобуя для формирования опорных сигналов.
Основная идея способа состоит в следующем:
1. Восстановление чистой несущей на всей длине посылки буя, посредством фазовой модуляции принятого сигнала посылки достоверной информации, выделенной из нее, взятой с обратным знаком (ре-модуляции).
2. Измерении частоты этой ре-модулированной посылки оптимальным алгоритмом, дающим потенциальную точность измерения [4]:
где
Т - длительность сигнала;


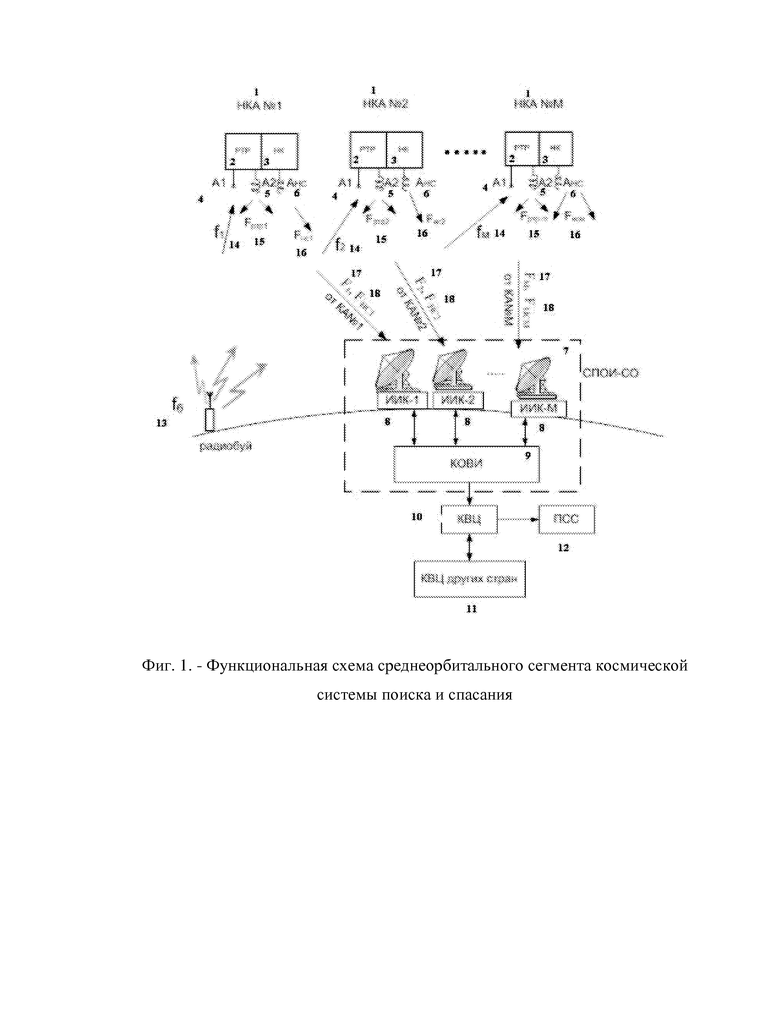
Для лучшего понимания сути и полезности предлагаемого способа приведем краткое описание схемы проведения измерений частоты сигнала посылок радиобуев и использования этих измерений для определения координат радиобуев среднеорбитальным космическим сегментом поиска и спасания. На фигуре 1изображена функциональная схема сегмента, где обозначено:
1. НКА № 1…№ М - космические аппараты глобальных навигационных спутниковых систем - ГЛОНАСС, GPS, Gallileo;
2. РТР - ретрансляторы сигналов, излучаемых радиобуями;
3. НК - навигационные комплексы - аппаратура, служащая для формирования и передачи сигналов, излучаемых НКА;
4. А1- приемные антенны сигналов радиобуев;
5. А2 - передающие антенны ретранслированных сигналов радиобуев;
6. Анс - антенны навигационных сигналов;
7. СПОИ-СО - станция приема и обработки информации среднеорбитального сегмента;
8. ИИК-1…ИИК-М - информационно-измерительные комплексы;
9. КОВИ - комплекс обработки и выдачи информации;
10. КВЦ - координационно-вычислительный центр;
11. КВЦ других стран;
12. ПСС - поисково-спасательные службы;
13. fб - частота сигнала радиобуя;
14. f1, f2, ... fм - частоты сигналов радиобуя, приходящих на входы ретрансляторов НКА №1, НКА №2, НКА №М соответственно;
15. FРТР1, FРТР2, FРТРМ - частоты сигналов на выходах ретрансляторов, размещенных на НКА;
16. FНС1, FНС2, FНСМ - частоты навигационных сигналов, излучаемых НКА;
17. F1, F2, FМ - частоты сигналов ретрансляторов НКА, принимаемые СПОИ-СО;
18. FНС1, FНС2, FНСМ - частоты навигационных сигналов НКА, принимаемые СПОИ-СО.
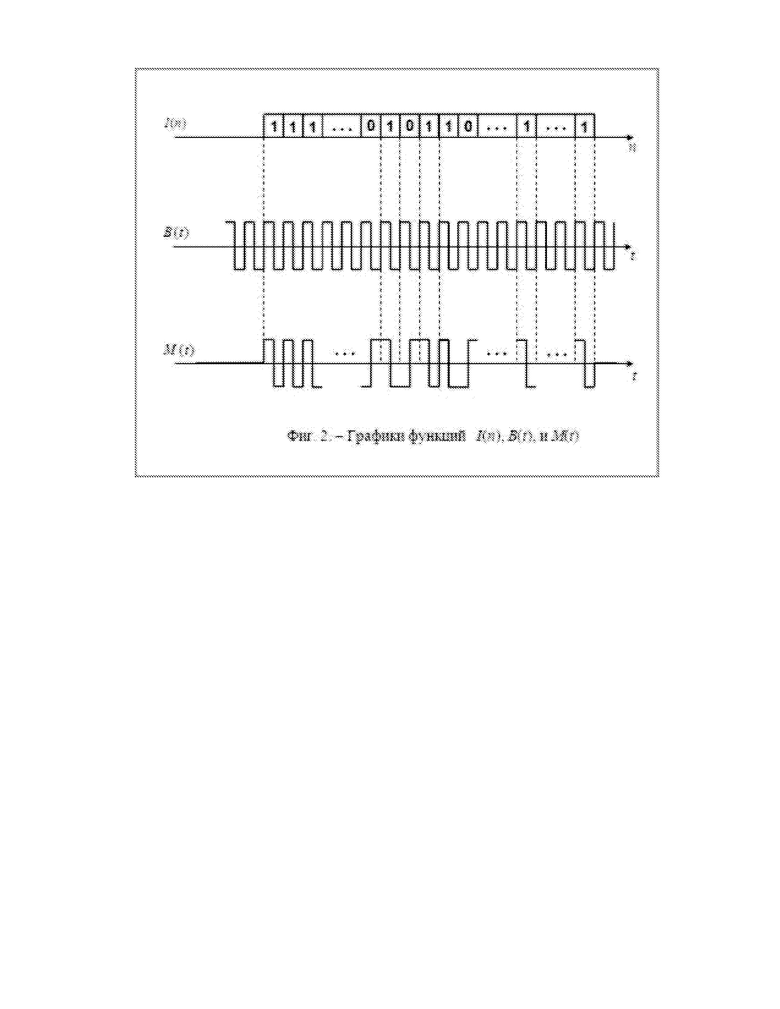
На фигуре 2 представлены графики функций I(n), B(t), и M(t).
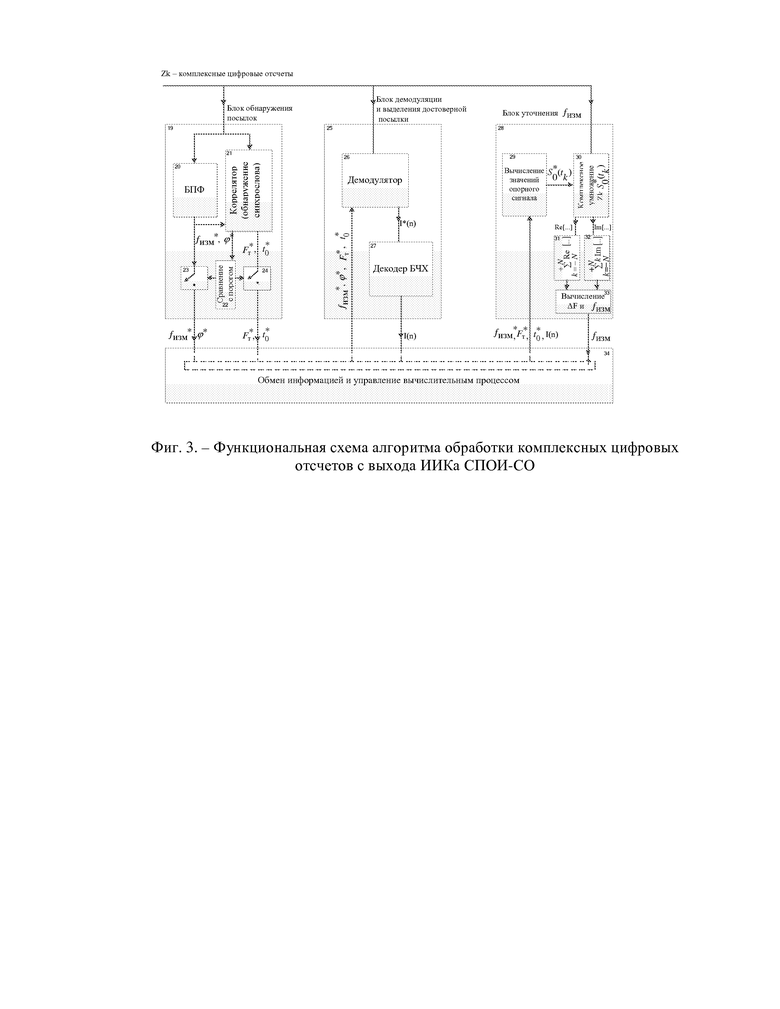
На фигуре 3 представлена Функциональная схема алгоритма обработки комплексных цифровых отсчетов с выхода ИИКа СПОИ-СО, где обозначено:
19. Блок обнаружения посылок;
20. Блок быстрого преобразования Фурье (БПФ);
21. Коррелятор;
22. Блок сравнения с порогом;
23, 24. Блоки разрешения на выдачу параметров посылки;
25. Блок демодуляции и выделения достоверной посылки;
26. Демодулятор;
27. Декодер Боуза-Чоудхури-Хоквингейма;
28. Блок уточнения частоты:
29. Блок вычислений опорного сигнала;
30. Блок комплексного умножения;
31, 32. Блоки суммирования действительной и мнимой части комплексных произведений;
33. Блок вычисления уточненного значения частоты сигнала посылки;
34. Блок обмена информацией и управления вычислительным процессом.
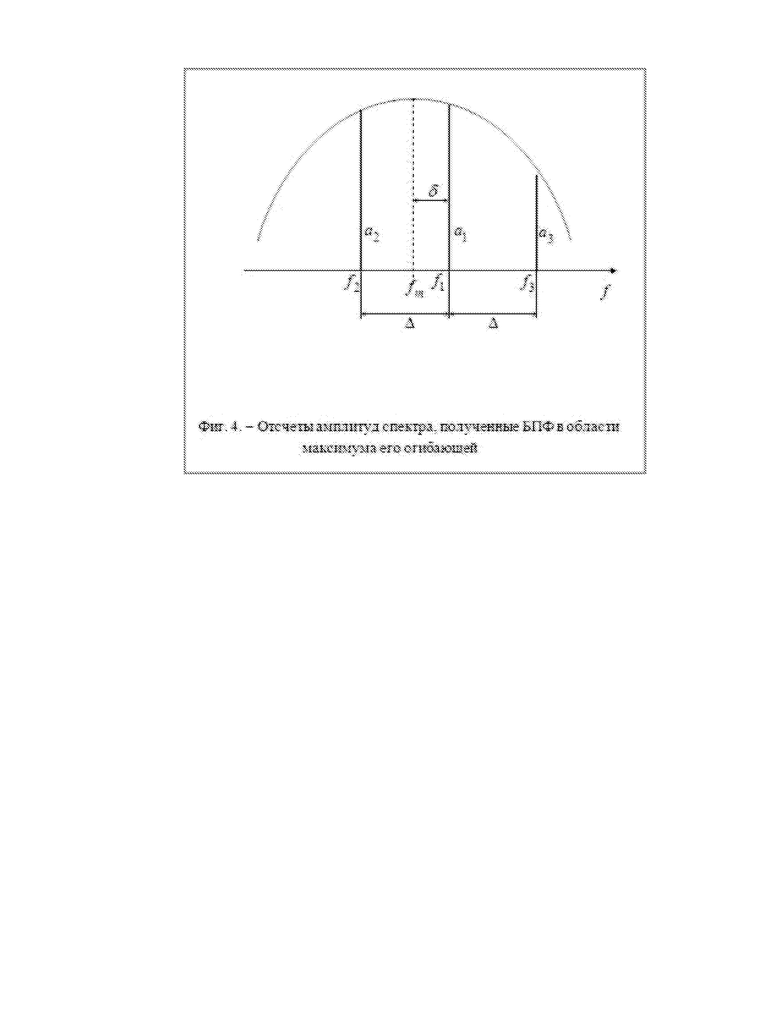
На фигуре 4 представлены отсчеты амплитуд спектра, полученные БПФ в области максимума его огибающей.
Частота сигнала посылки радиобуя приходящая на m-й НКА, описывается выражением:

где



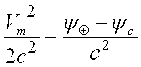
Vm- модуль относительной скорости спутника относительно буя;

с - скорость света.
В формуле (2) только одна величина фактически зависит от положения радиобуя - это 



где







К сожалению, вычислению 

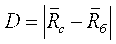
Для устранения этой неприятности, как всегда делают в навигационных радиосистемах, используют разности измерений

В качестве первого (опорного) спутника можно выбирать любой.
Подставляя в формулы (4) выражения для соответствующих
для случая неподвижного буя на поверхности Земли или с пятью неизвестными(В, L и три компонента вектора скорости радиобуя), если буй движется под действием течения, ветра и морской качки.
Для неподвижного буя достаточно иметь измерения

Используя измерения 

Ввиду малости релятивистских поправок и их близости для трех спутниковых систем (GPS, Глонасс, Galileo) их разностями в формулах (4 и 5) можно пренебречь.
Тогда получим:
где

В этой формуле 



Из изложенного следует, что для определения координат радиобуя необходимо знать только разности

Осуществление изобретения
Суть данного способа измерения частоты сигналов посылок радиобуев в космической системе поиска и спасания КОСПАС-САРСАТ на станции приема и обработки информации со среднеорбитальных ИСЗ систем «Глонасс», GPS и Gallileo которые оснащены ретрансляторами сигналов радиобуев заключается в следующем. Для уменьшения ошибок измерения частот принимаемых сигналов, вызванных собственными шумами приемников спутников-ретрансляторов и наземных станций, эти измерения производятся с использованием всей длительности сигнала посылки радиобуя (440 мс), а не только по участку длительностью 160 мс - участку излучения чистой несущей частоты радиобуя, и соответственно всей энергии сигнала.
Для этого производится модуляция принятых наземной станцией (станцией приема и обработки информации со среднеорбитальных ИСЗ систем «Глонасс», GPS и Gallileo) сигналов аварийных радиобуев достоверной цифровой информацией, заложенной в сигналы передаваемые тем же самым аварийным радиобуем и выделенной из принятого сигнала в процессе его демодуляции и декодирования, взятой с обратным знаком (ремодуляция сигнала). Это преобразует весь принятый сигнал посылки этого радиобуя в немодулированную синусоиду, чем и обеспечивается получение минимально возможной ошибки измерения его частоты.
Хотя, как было показано выше для определения координат радиобуев необходимы только разности



Здесь и далее при описании способа измерения частоты и алгоритма обработки сигнала его реализующего, с целью упрощения формул, мы будем опускать индекс «m» у сигналов и их параметров (f, 
Как указывалось выше, основная идея способа измерения FOA состоит в следующем:
- восстановлении чистой несущей на всей длине посылки буя, за счет фазовой модуляции принятого сигнала посылки достоверной информацией выделенной из посылки, с обратным знаком (ремодуляции) и измерении частоты этой ре-модулированной посылки с использованием алгоритма, дающего потенциальную точность.
Приведем подробное описание этого способа.
Входной информацией для алгоритма измерения частоты 

где



В этой формуле присутствует сигнал 


Частота сигнала


где




Частоты гетеродинов ретрансляторов, установленных на НКА, формируется из частот высокостабильных, высокоточных генераторов навигационных сигналов НКА, а частота гетеродина приемника СПОИ-СО формируется из принятой на СПОИ-СО частоты навигационного сигнала, излучаемого этим спутником, и равна:

Подставляя это значение в (8), получим:

Подставляя f=



Фаза сигнала буя 

где



где

n - номер бита этой последовательности,

где
На фигуре 2 представлены графики функций I(n), B(t) и M(t). На этих графиках моменты времени 
Алгоритм обработки комплексных цифровых отсчетов 



На фигуре 3 представлена функциональная схема алгоритма обработки отсчетов 
Блок обнаружения посылок (блок 19) состоит из двух алгоритмов, решающих задачи: обнаружения и предварительного (приближенного) измерения их параметров:
- алгоритма быстрого преобразования Фурье (блок 20, БПФ), который обнаруживает несущую частоту и фазу посылки и определяет их значения
(
- алгоритма корреляционного анализа наличия синхрослова (первые 24 бита цифровой части посылки, одинаковые для всех посылок, блок 21) и определения


Для получения более точных значений 

Используются три значения амплитуды спектральных отчетов БПФ:
- наибольшее - 

- отстоящее от него на -

- отстоящее от

Значение частоты максимум 
Аналогично вычисляется и 
Кроме этих функций блок обнаружения посылки определяет значение тактовой частоты посылки (


Полученное в результате работы алгоритмов обнаружения максимальное значение корреляционной функции сравнивается с заданным порогом (блок 22) и в случае превышения его, посылка считается обнаруженной, а ее параметры (

Полученные в результате работы блока обнаружения приближенные значения параметров посылки 

Блок обнаружения должен обнаруживать все посылки от всех буев, имеющиеся в потоке входных данных 
Блок демодуляции и выделения достоверной посылки(блок 25), используя параметры 




Распознавание посылок от одного и того же буя производится по параметрам
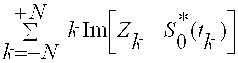
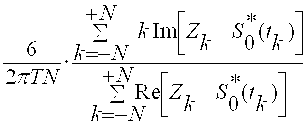
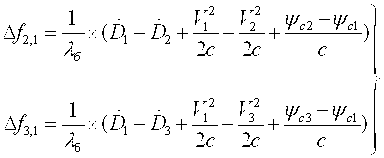
Блок уточнения


Значение

Полученная информационная последовательность

в каналах приема сигналов этого буя через другие спутники-ретрансляторы. Такое использование


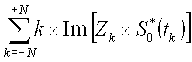
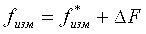
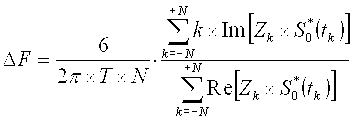
Уточненное значение
где
Δ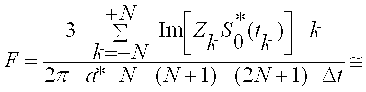
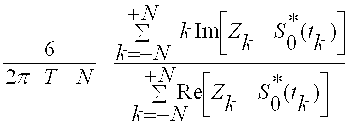
В этих формулах


(блок 33);

k-номер отсчета 
За нулевой номер (k = 0) принят момент времени




Блок 32 производит взвешенное (умноженное на k) суммирование мнимых частей комплексных произведений.
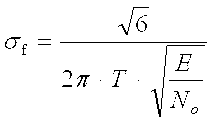
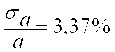
Формулы (18) и (19) дают достаточно высокую точность определения 



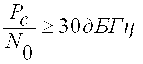




Среднеквадратическая ошибка измерения
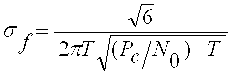
а относительная С.К.О. амплитуды посылки равна:
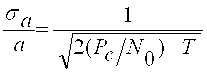
При 

При этих оценках не учтены ухудшения, вызванные не идеальностью формы моделирующего сигнала, а также возникающие из-за ошибок 






При больших


Кроме ошибок от шумов приемников на спутниках-ретрансляторах и СПОИ-СО и ошибок от нестабильностей частоты и фазы передатчиков буев, ошибки измерения FOA вызываются также нестабильностями условий распространения радиоволн в ионосфере на путях их распространения от буя до спутников, так называемые ионосферные ошибки. Ввиду разных областей ионосферы, через которые проходят пути распространения, эти ошибки только частично компенсируются, а их флюктуации на интервале длительности посылки практически независимы.
Проведенные оценки этих ошибок показали, что в периоды большой солнечной активности С.К.О. ионосферных ошибок 
Тогда суммарная величина вычисления разности

Список использованной литературы
1. А.И. Балашов, Ю.Г. Зурабов, Л.С. Пчеляков, В.И. Рогальский, В.С. Шебшаевич «Международная космическая радиотехническая система обнаружения терпящих бедствие» под ред. В.С. Шебшаевича, Москва, Радио и связь, 1987,
2. Ю.М. Урличич, Ю.Ф. Макаров, А.С. Селиванов, И.В. Никушкин, В.И. Рогальский, Ю.Г. Зурабов «История создания и перспективы развития международной космической системы поиска и определения местоположения терпящих бедствие судов и самолетов Коспас-Сарсат», Телекоммуникации и транспорт, 4-2012.
3. «MEOSARImplementationPlan (MIP) C/SR.012 (План внедрения системы СССПС (MEOSAR) 406 МГц КОСПАС-САРСАТ, ISSUE 1 - ред.10, октябрь 2014 г.
4. В.А. Котельников «Теория потенциальной помехоустойчивости», Москва, Госэнергоиздат М.-Л. 1956.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539914C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2535653C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2528405C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2013 |
|
RU2517176C1 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ ИССКУСТВЕННЫХ ИОНОСФЕРНЫХ ОБРАЗОВАНИЙ | 2013 |
|
RU2523912C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2583894C2 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
Изобретение относится к области радиотехники и предназначено для использования в среднеорбитальном сегменте космической системы поиска и спасения терпящих бедствия судов, летательных аппаратов, отдельных людей или групп. Согласно способу измерения производятся с использованием всей длительности сигнала посылки радиобуя (440 мс), а не только по участку длительностью 160 мс - участку излучения чистой несущей частоты радиобуя, и соответственно всей энергии сигнала. Для этого производится модуляция принятых наземной станцией (станцией приема и обработки информации со среднеорбитальных ИСЗ систем «Глонасс», GPS и Gallileo) сигналов аварийных радиобуев достоверной цифровой информацией, заложенной в сигналы, передаваемые тем же самым аварийным радиобуем и выделенной из принятого сигнала в процессе его демодуляции и декодирования, взятой с обратным знаком (ремодуляция сигнала). Это преобразует весь принятый сигнал посылки этого радиобуя в немодулированную синусоиду, чем и обеспечивается получение минимально возможной ошибки измерения его частоты. Технический результат заявленного изобретения заключается в повышении точности измерений частоты сигналов радиобуев. 1 з.п. ф-лы, 4 ил.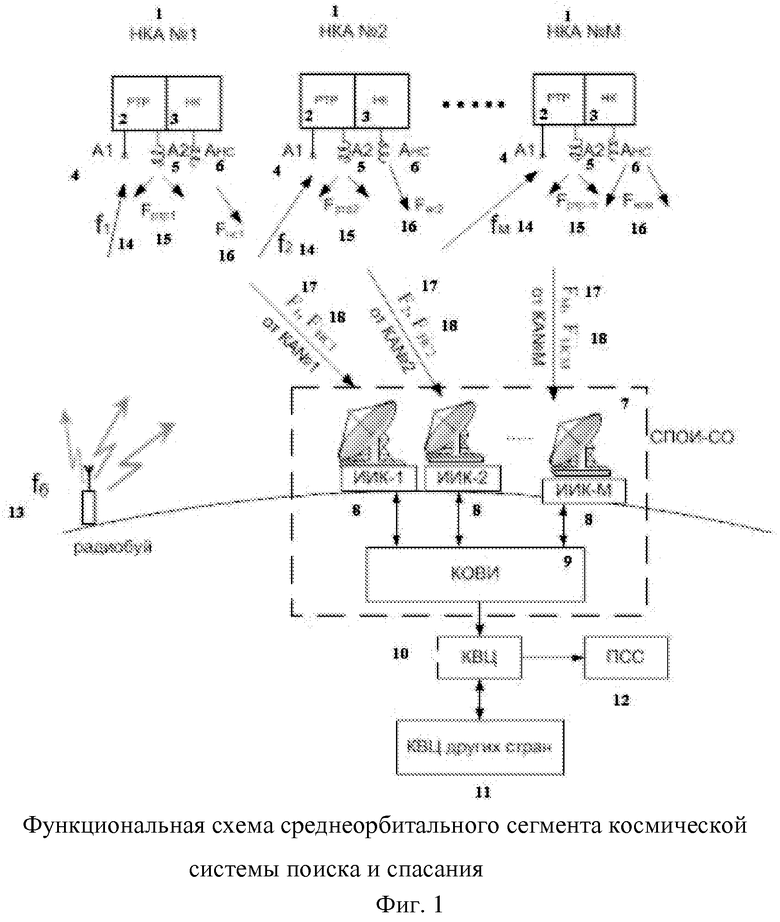
1. Способ измерения частоты сигналов посылок радиобуев в космической системе поиска и спасания, отличающийся тем, что измерения частоты сигналов посылок излучаемых радиобуями, ретранслированными спутниками-ретрансляторами и принимаемыми наземной станцией, производят с использованием всей длительности сигналов посылок и всей энергии их, для чего на наземной станции усиливают принятые сигналы и переносят их спектр в область нулевых частот, производят их преобразование в цифровой формат, полученные комплексные цифровые отсчеты принятого сигнала 

















где 





производят комплексное перемножение цифровых отсчетов 

2. Способ измерения частот сигналов по п.1, в котором используют суммирование сигналов нескольких посылок того же радиобуя, для чего комплексные цифровые отсчеты обнаруженных, но не достоверных посылок сигналов суммируют с комплексными цифровыми отсчетами других обнаруженных посылок сигналов, частоты и времени прихода 25 бита которых находятся в диапазонах возможных значений для этого радиобуя, после суммирования двух, трех или более посылок сигналов суммарный сигнал используют для получения достоверной информации I(n) посылки радиобуя для формирования опорных сигналов.
| RU 94039162 A1, 10.09.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОПЕРЕДАТЧИКОВ С ИСПОЛЬЗОВАНИЕМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2321017C2 |
| US 7881663 B2, 01.02.2011 | |||
| US 2014266871 A1, 18.09.2014. | |||

