Предлагаемое изобретение относится к технике космической связи и может быть использовано в космической системе поиска и спасания для приема и обработки сигналов от среднеорбитальных космических аппаратов системы КОСПАС-САРСАТ, оборудованных приемоответчиками (ретрансляторами) сигналов аварийных радиобуев (далее АРБ-406) с целью получения достоверной информации о факте и типе аварии, персональном номере и координатах АРБ-406 и передачи ее в Российский международный координационный центр системы КОСПАС-САРСАТ (далее КЦС).
В настоящее время спутниковая система КОСПАС-САРСАТ модернизируется путем установки поисково-спасательных ретрансляторов на борту космических аппаратов - российских ГЛОНАСС, американских GPS и европейских Galileo с высотой орбит от 19 тыс. до 23 тыс. км. Эти новые космические элементы сформируют новый сегмент системы КОСПАС-САРСАТ - среднеорбитальную спутниковую систему поиска и спасания. Наземные станции для приема сигналов от этих ИСЗ размещаются по всему миру, так чтобы обеспечить глобальное покрытие всей Земли. На каждой такой станции предусмотрено от 4 до 8-ми антенн, каждая из которых принимает сигналы от аварийных радиобуев, переданные через один из спутников-ретрансляторов. Подсоединенные к этим антеннам аналого-цифровые приемники выделяют сигнала аварийного радиобуя достоверную информацию и измеряют время прихода и частоту сигнала аварийного радиобуя на спутник.
Известна станция приема информации от аварийных радиобуев - MEOLUT-600 (производство Honeywell, США), предназначенная для приема и обработки сигналов АРБ-406 (далее – радиобуй), ретранслированных через среднеорбитальные космические аппараты и передачи достоверных посылок в КЦС. Станция MEOLUT-600 имеет в своем составе: изменяемое число параболических антенных систем (4 – 6), на каждой антенне размещается: полосовой фильтр и малошумящий усилитель с преобразователем частоты вниз. Блок обработки сигналов модели MEOLUT 600, включает аналого-цифровые приемники (далее АЦП) для каждой антенны, навигационный приемник глобальных навигационных спутниковых систем (Глонасс, GPS и Gallileo), процессор обработки измерений полученных от АЦП и вычисляющий координаты радиобуев, интерфейс с координационным центром системы. Наведение антенны – по программе.
Описание станции MEOLUT-600 приведено на сайте фирмы производителя www.gt.honeywell.com. Устройство станции MEOLUT-600 по функционально-структурной схеме наиболее близко к предложенному техническому решению и выбрано в качестве его ближайшего аналога.
Основным недостатком станции MEOLUT-600 является низкая точность определения координат радиобуёв из-за низкой точности измерения несущей частоты радиобуя (среднее квадратичное отклонение ошибки измерения несущей частоты измеренное на MEOLUT-600 составляет 0,3 Гц) так, как на MEOLUT-600 измерения частот принимаемых сигналов радиобуёв, производятся с использованием участка сигнала посылки радиобуя длительностью 160 мс, где идет излучение сигнала радиобуя в режиме чистой несущей. Одновременно измеряется время приема сигнала (среднее квадратичное отклонение ошибки измерения времени приема сигнала, измеренное на MEOLUT-600 составляет 20 мкс). Такие точности измерения требуют одновременного приема сигнала радиобуя ретранслированных 4-мя или более спутниками в течение не менее 10 минут для обеспечения заданной точности определения местоположения радиобуёв (не хуже 5 км с вероятностью не менее 0,95 и то только, если геометрический фактор (DOP) конфигурации этих спутников не больше 1,4).
Также, в связи с тем, что с каждой станции приёма и обработки информации, видимых в определенный момент спутников обычно оказывается больше, чем количество антенных систем на ней, возникает нерешённая в MEOLUT-600 задача планирования - на какие спутники в определенный момент нужно направлять антенные системы данной станции, чтобы обеспечить возможно большую площадь, на которой можно было бы определить координаты радиобуев с точностью, не хуже заданной. Кроме того, к недостаткам известной станции приема информации MEOLUT-600 можно отнести ее высокую стоимость.
В свою очередь, предложенное техническое решение среднеорбитальной станции приема информации от радиобуёв космической системы поиска и спасания КОСПАС-САРСАТ (далее СПОИ-СО) позволяет устранить перечисленные недостатки MEOLUT и позволит предложить СПОИ-СО, обладающую высокой точностью приёма определения координат радиобуя при оптимальном количестве задействованного оборудования.
Указанный выше технический результат достигается при использовании предложенной СПОИ-СО, представляющей собой совокупность информационно-измерительных комплексов (далее ИИК), содержащих взаимосвязанные между собой средства приёма сигнала от радиобуёв через среднеорбитальные ИСЗ спутниковых навигационных систем и совокупность соответствующих средств обработки информации, взаимодействующих с антенными постами (далее АП), а также средства управления и внешнего интерфейса. В отличие от аналога, СПОИ-СО включает единый комплекс обработки и выдачи информации (далее КОВИ). КОВИ содержит основной и резервный вычислительные системные блоки (ВСБ) – высокоскоростные серверы (далее ВСБ-С) для определения координат и вектора скорости радиобуя и управления азимутально-угломестным наведением антенн, выполненных полноповоротными, на среднеорбитальные ИСЗ спутниковых навигационных систем, а также средства отображения информации. ВСБ-С КОВИ подключены через коммутатор-маршрутизатор к КЦС КОСПАС-САРСАТ, средствам отображения геоинформационных систем, а также посредством сети типа Ethernet к средствам обработки информации упомянутых ИИК для обеспечения управления их оборудованием. СПОИ-СО представляет собой совокупность стандартизированных изделий.
Оборудование ИИК включает активную антенную систему (далее ААС), шкаф управления и аппаратную стойку. В состав ААС входит АП с параболической полноповоротной двухосной антенной, внешним приёмным устройством (далее ВПУ), содержащим облучатели и малошумящие усилители (далее МШУ) со встроенными полосовыми фильтрами, и системой наведения, а также коммутационный шкаф. Шкаф управления содержит промышленные контроллеры и соединён с коммутационным шкафом. В аппаратной стойке расположены основной и резервный аналого-цифровые приёмники сигнала от среднеорбитальных ИСЗ (далее АЦПРМ-СО) и основной и резервный вычислительные системные блоки (далее ВСБ).
К расположенным в аппаратной стойке ВСБ подключены шкаф управления, коммутатор-маршрутизатор ИИК и жидкокристаллическая консоль, а так же основной и резервный АЦПРМ-СО. Шкаф управления подключён к ВСБ через шину типа Profibus. Коммутатор-маршрутизатор ИИК обеспечивает соединение с упомянутым коммутатором КОВИ. АЦПРМ-СО включает канал приёма сигналов от радиобуёв и канал приёма навигационного сигнала и соединён с ВПУ АП. АЦПРМ-СО для уменьшения ошибок измерения частоты принимаемых сигналов радиобуев, вызванных собственными шумами приемников спутников-ретрансляторов и наземных станций, производит измерение частоты сигнала радиобуя с использованием всей длительности сигнала посылки радиобуя 440 мс, а не только по участку чистой несущей длительностью 160 мс, и соответственно всей энергии сигнала. Для этого производится модуляция принятых СПОИ-СО сигналов радиобуев достоверной цифровой информацией, заложенной в сигналы, передаваемые тем же самым радиобуем, и выделенной из принятого сигнала в процессе его демодуляции и декодирования, взятой с обратным знаком (ремодуляция сигнала). Это преобразует весь принятый сигнал посылки этого радиобуя в немодулированную синусоиду, чем и обеспечивается получение минимально возможной ошибки измерения частоты радиобуя. Такой способ измерения частоты сигнала является новым (заявка на изобретение №2015119699) и позволяет повысить точность измерения частоты, по крайней мере, в 4-6 раза, что позволяет во столько же раз повысить точность определения координат радиобуев.
КОВИ подключён через коммутатор-маршрутизатор данного комплекса к, вышеописанным ИИК-ам. Число ИИК-ов на СПОИ-СО может варьироваться, в зависимости от размеров и расположения территории обслуживаемой СПОИ-СО и возможности размещения на ней достаточного количества АП. К КОВИ могут быть подключены, как находящиеся в непосредственной видимости, так и удаленные ИИК-и. Оборудование КОВИ представляет собой серверную стойку, на которой размещены упомянутые основной и резервный ВСБ-С. К ВСБ-С подключен навигационный приёмник, коммутатор-маршрутизатор и жидкокристаллическая консоль. Средства отображения геоинформационных систем СПОИ-СО включают мультимедийный проектор, подключённый к серверу упомянутого КОВИ, экран и средства отображения спутниковых карт, например карт Google или Яндекс.
Способ управления наведением антенн СПОИ-СО предусматривает наведение в определённый момент времени M антенн СПОИ-СО на M аппаратов, выбранных из N среднеорбитальных ИСЗ, причём M < N. В отличие от аналога, используют геоинформационную систему, в которой на карту земной поверхности нанесена сетка с равностоящими друг от друга узлами. Для узлов геоинформационной системы и выбранных среднеорбитальных ИСЗ, рассчитывают контрольный параметр, например, точность определения координат радиобуя. Выбирают узлы с уровнем контрольного параметра не меньше заданного. Совокупность таких узлов образует некоторую группу, границы которой образуют границы мгновенной зоны обслуживания для данного созвездия из M среднеорбитальных ИСЗ, видимого СПОИ-СО в заданный момент времени. Повторяют вышеописанные расчеты для всех возможных сочетаний из N видимых СПОИ-СО ИСЗ по M возможным. Сравнивают количество узлов зоны обслуживания в упомянутых группах и выбирают для наведения M антенн СПОИ-СО в течение заданного временного интервала созвездие из M среднеорбитальных космических аппаратов с наибольшим числом узлов зоны обслуживания в упомянутой группе. Возможным вариантом описанного алгоритма является вариант, в котором выбирают группу из М ИСЗ в которой точность определения координат в заданной зоне максимальна.
Предложенное изобретение поясняется чертежами:
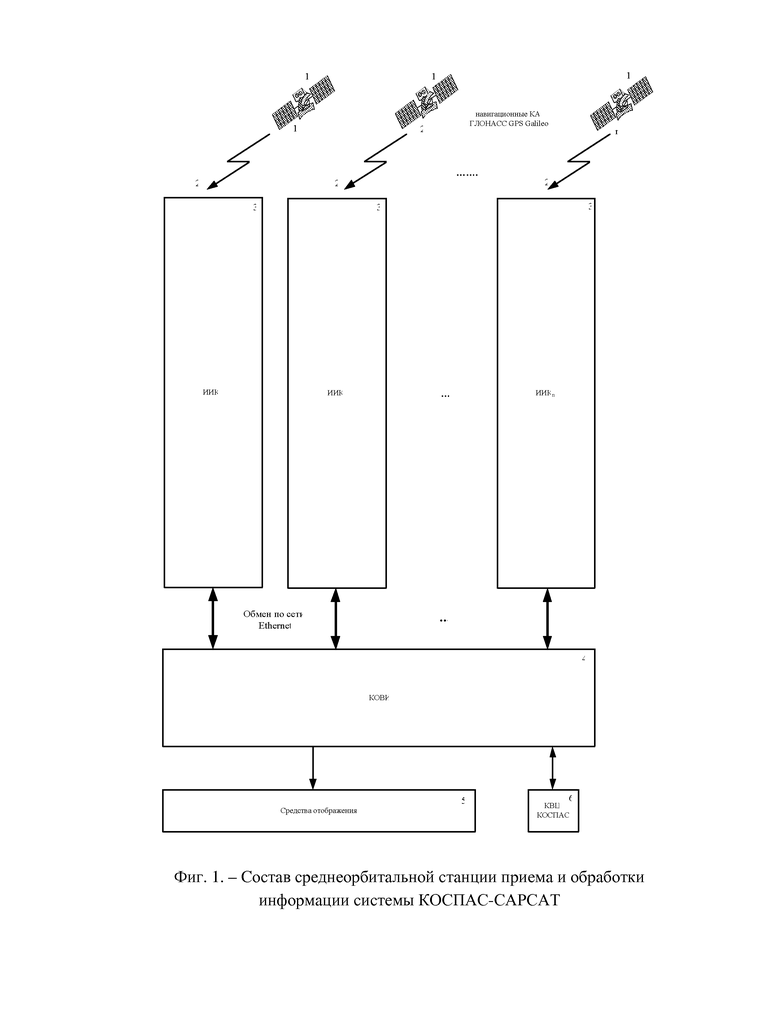
фиг. 1 – состав СПОИ-СО, где
1 – навигационные космические аппараты 1…n, 2 – передаваемые навигационные сигналы, 3 – ИИК1…m, 4 – КОВИ, 5 – средства отображения, 6 – КЦС (КВЦ) КОСПАС;
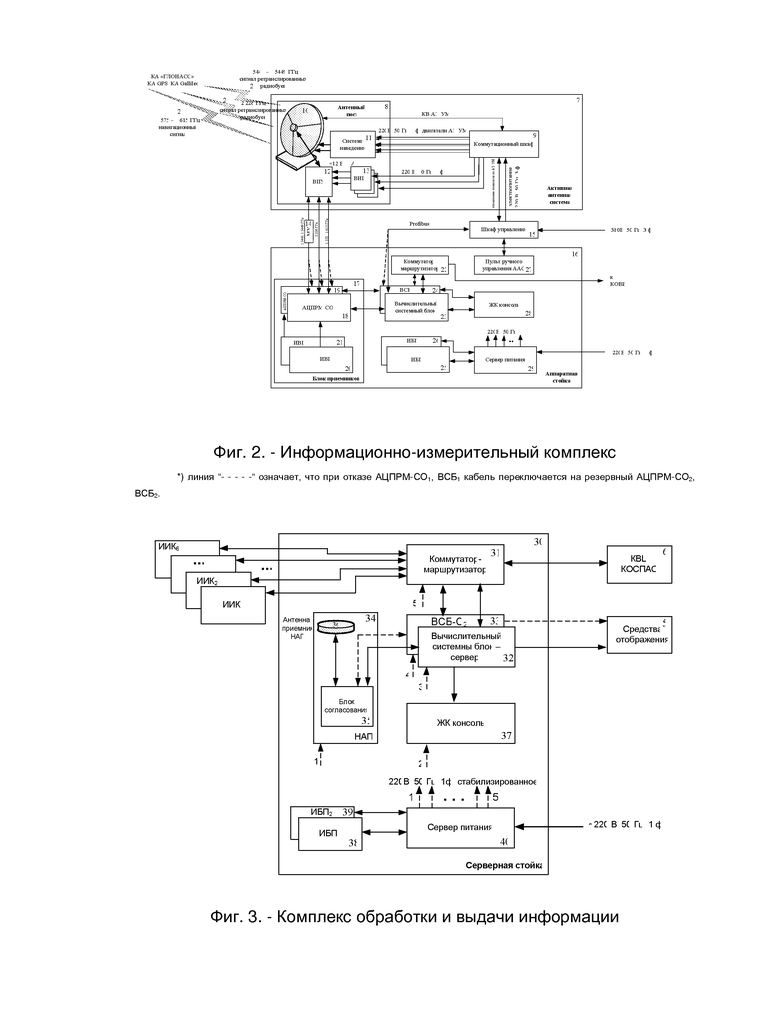
фиг. 2 – структурная схема ИИК,
где 7 – ААС, 8 – АП, 9 – коммутационный шкаф, 10 – приёмная антенна, 11 – система наведения, 12 – ВПУ, 13 – вторичный источник питания (далее ВИП), 14 – магистральный усилитель, 15 – шкаф управления, 16 – аппаратная стойка, 17 – блок приёмников, 18 – основной и 19 – резервный АЦПРМ-СО, 20 – основной и 21 – резервный источник вторичного питания (далее ИВП), 22 – коммутатор-маршрутизатор, 23 – основной и 24 – резервный ВСБ, 25 – основной и 26 – резервный ИБП, 27 – пульт ручного управления ААС, 28 – ЖК консоль, 29 – сервер питания;
фиг. 3 – структурная схема КОВИ, где
5 – средства отображения, 6 – КЦС (КВЦ) КОСПАС, 30 – серверная стойка, 31 – коммутатор-маршрутизатор, 32 – основной и 33 – резервный ВСБ-С, 34 – навигационный приёмник (далее НАП), 35 – блок согласования, 36 – антенна-приёмник, 37 – ЖК-консоль, 38 – основной и 39 – резервный ИБП, 40 – сервер питания.
СПОИ-СО (фиг. 1), включает ИИК 3 (от 4 до 7), КОВИ 4 (один комплект) и средства отображения геоинформационных систем 5 (один комплект). Составные части предлагаемого СПОИ-СО построены преимущественно из покупных стандартизованных изделий, что позволило существенно сократить стоимость и сроки разработки и изготовления СПОИ-СО. ИИК 3 и КОВИ 4 осуществляют между собой обмен информацией по сети Ethernet и могут быть расположены друг от друга на значительном расстоянии. ИИК 3 принимает от навигационных космических аппаратов 1 (ГЛОНАСС, GPS и Galileo), ретранслированные сигналы радиобуёв 21 (диапазон частот 1544,1-1544,9 МГц и 2226,0 МГц) системы КОСПАС-САРСАТ и навигационные сигналы 22 (диапазон частот 1575-1615 МГц) которые передаются в открытом коде. КОВИ 4 передаёт на средства отображения 5 данных о включившихся радиобуях и их координатах для отображения на карте Земного шара на экране, а также передаёт обработанную информацию, содержащую принятые данные о радиобуях, и вычисленных координатах места бедствия радиобуев в КЦС 6. КОВИ 4 так же осуществляет контроль за работоспособностью аппаратных единиц и программного обеспечения критичных элементов СПОИ-СО – АЦПРМ-СО 18,19, ВСБ 23, 24, ВСБ-С 32, 33. В случае сбоев в работе КОВИ 4 осуществляет переключение на резервные блоки и/или перезапускает соответствующие процессоры, а так же сообщает об этом операторам, которые могут связаться с техническими специалистами обслуживающим СПОИ-СО для ликвидации неисправности.
ИИК 3 (фиг. 2) включает ААС 7, магистральный усилитель (далее МУ) 14, шкаф управления 15 и аппаратную стойку 16. Шкаф управления 15 и аппаратная стойка 16 расположены в помещении. ААС 7 включает АП 8 и коммутационный шкаф 9.
АП 8 СПОИ-СО имеет следующие основные тактико-технические характеристики: тип антенны 10 – однозеркальная, двухдиапазонная параболическая приемная активная антенна; диаметр антенны – 3,5 м; поляризация принимаемого сигнала – левого и правого направления вращения с коэффициентом эллиптичности не более 1 дБ; рабочие частоты приема ретранслированных сигналов радиобуев - 1544,1-1544,9 МГц (поляризация левая) и 2226,5 МГц (поляризация левая), навигационного сигнала – 1575,0-1615,0 МГц (поляризация правая), коэффициент усиления антенны не менее 33 дБ на частотах 1544,1-1615,0 МГц и не менее 36 дБ на частотах 2226,5 МГц; шумовая температура при углах места более 15о не более 60 К; система наведения антенны двухосная – азимутальная и угломестная; максимальная скорость поворота антенны 1,5о/с; режимы управления – программное сопровождение по программе от ПЭВМ и ручное управление; диапазон рабочих температур от минус 40 до +50оС, допустимые ветровые нагрузки до 25 м/с (рабочая) и 50 м/с (предельная). АП 8 также имеет концевые выключатели движения (далее КВ) – возвратный и невозвратный по азимуту и углу места (всего АП содержит 8 КВ).
АП 8 содержит коммуникационный шкаф 9, соединённый со шкафом управления 15, расположенным в помещении, рядом с аппаратной стойкой 16. Коммуникационный шкаф 9 представляет собой влагозащищенную металлическую клеммную коробку, в которой осуществляется коммутация соединений кабельной сети расположенной на АП 8 с подходящей к АП 8 кабельной сетью из помещения аппаратной стойки от шкафа управления 15.
АП 8 содержит ВПУ 12 и три ВИП 13. ВПУ 12 подключено к облучателю ААС 7 и аппаратно реализовано на основе полосового фильтра и малошумящего усилителя (далее МШУ). ВПУ 12, входящее в состав АП 8, содержит три облучателя и три МШУ со встроенными фильтрами. ВПУ 12 служит для фильтрации и предварительного усиления сигналов радиобуев, ретранслированных со среднеорбитальных ИСЗ в диапазоне частот: 1544 ГГц и 2226 ГГц (канал первый, на фиг. 2 обозначение 21), а также для фильтрации и предварительного усиления навигационных сигналов систем Глонасс, GPS и Galileo в диапазоне 1565÷1615 ГГц (канал второй, на фиг. 2 обозначение 22). Электропитание МШУ осуществляется от ВИП 13 который размещается на АП 8 ВИП 13 получает электропитание 220 В/50 Гц от шкафа управления 15 через коммутационный шкаф 9. ВИПы, входящие в состав АП, представляют собой преобразователи переменного напряжения ~220 В/50 Гц в постоянное 12-14 В, 2А. Всего в состав АП входят три ВИП для электропитания трёх МШУ.
Шкаф управления 15 осуществляет формирование сигналов управления приводами АП 8 по азимуту и углу места и осуществляет электроснабжение АП 8 от внешней трёхфазной сети через её преобразователи и фильтры. Шкаф управления 15, расположенный в помещении содержит три автоматических выключателя, два фильтра помех сети электропитания, преобразователи напряжения сети ~380 В/50 Гц, 3 фазы в сеть напряжения ~220 В/50 Гц, 1 ф для электропитания обмоток асинхронных двигателей для перемещения АП 8 по азимуту и углу места, два промышленных контроллера Siemens Micromaster которые преобразуют сигналы управления перемещением АП 8 по азимуту и углу места, поступающие по шине Profibus от ВСБ 23 (24) в токовые сигналы, которые подаются на обмотки асинхронных двигателей – приводов по азимуту и углу места. В случае выхода из строя основного ВСБ 23 шкаф управления 15 можно подсоединить к резервному ВСБ 24. Промышленные контролеры шины Profibus фирмы Siemens шкафа управления 15 управляют реле через которые поступает напряжение на обмотки асинхронных двигателей приводов по азимуту и углу места и на КВ. Контролер шины Profibus представляет собой высокотехнологичное устройство, позволяющее полностью проконтролировать работу двигателей, концевых выключателе. Контроллер имеет в памяти более сотни ситуаций о различных сбоях и отказах и совместно с сервисной программой, установленной на ВСБ 23 (24) позволяет легко настроить систему управления АП 8 и устранить любые возникшие неисправности.
Автоматический выключатель отключает напряжение электропитания на АП 8 в случае увеличения входного напряжения 380В выше нормы (380В+10%) или уменьшения ниже нормы (380В-20%), соответственно. Два автоматических контроллера электросети, один по азимуту другой по углу места, выключают подачу электропитания на асинхронные двигатели соответствующего привода при кратковременных скачках напряжения сети, коротком замыкании и холостом ходе вторичной сети. Автоматические контроллеры электросети имеют три положения – включено, выключено и сбой. От АП 8 в шкаф управления 15, через коммутационный шкаф 9 поступают сигналы с КВ (возвратного и невозвратного) АП 8 по азимуту и углу места. Из шкафа управления 15 в АП 8 через коммутационный шкаф 9 поступают сигнал замыкания КВ (при достижении АП границы перемещения по азимуту (-270о, +270о) или углу места (0, 90о)).
Аппаратная стойка 16 содержит один блок приёмников 17, один пульт ручного управления ААС 27, основной и резервный ВСБ 23 (24), один коммутатор-маршрутизатор 22, одну ЖК-панель 28 с консольными переключателями, два ИБП – основной 25 и резервный 26 и один сервер питания 29. В единый блок приёмников 17 стандартной ширины 19” для установки в аппаратную стойку 16 объединены АЦПРМ-СО 15 (16) и два ИВП – основной 20 и резервный 21. Основной 18 и резервный 19 АЦПРМ-СО ИИК 1 представляют собой аналого-цифровые устройства и обеспечивают приём сигналов радиобуёв ретранслируемых на частоте 1544,1 (Gallileo), 1544,5 (GPS), 1544,9 («Глонасс») и 2226,0 МГц (GPS DASS) и навигационного сигнала 1575,0 МГц (GPS, Gallileo) и Глонасс (1575,0-1615,0 МГц). Между ВПУ 12 и АЦПРМ-СО 18 (19) при расстоянии между АП 8 и аппаратной стойкой 16, расположенной в помещении более 50-70 м устанавливается магистральный усилитель 14 для компенсации потерь сигнала в кабеле. Таким образом, блок приёмников 17 с входящим в него основным 18 и резервным 19 АЦПРМ-СО и основным 20 и резервным 21 ИВП, коммутатор-маршрутизатор 22, ВСБ (основной 23 и резервный 24), ИБП (основной 25 и резервный 26), пульт ручного управления ААС 27, ЖК консоль 28 и сервер питания 29 размещаются в аппаратной стойке 16 высотой 33U, установленной в кондиционированном помещении.
Основной 18 и резервный 19 АЦПРМ-СО, входящие в блока приёмников 17 соединены соответственно с основным 23 и резервным 24 ВСБ. Основной 23 и резервный 24 ВСБ соединены со шкафом управления 15 ААС 7. Шкаф управления 15 ААС 7 соединён с ВСБ 23 (24) по шине Profibus и содержит два идентичных канала управления приводами АП 8 по азимуту и углу места на основе промышленных контролеров Profibus фирмы Siemens. Пульт ручного управления 27 служит для ручного перемещения АП 8 по азимуту и углу места и используется для проверки работоспособности двигателей и КВ АП.
КОВИ 4 содержит следующие элементы коммутатор-маршрутизатор 31, основной 32 и резервный 33 ВСБ-С, НАП 34 в который входит антенна-приемник 36 и блок согласования 35, ЖК консоль 37, ИБП (основной 38 и резервный 40) и сервер питания 40. Все приборы КОВИ 4 размещаются в серверной стойке 30 имеющей высоту 33 U, установленной в кондиционированном помещении. Совмещенный GPS/ГЛОНАСС/Galileo НАП 34 обеспечивает КОВИ 4 эфемеридами и частотно-временными поправками навигационных ИСЗ. ВСБ-С (35, 36) КОВИ 2 рассчитывают данные для системы наведения 11 для тех навигационных ИСЗ, которые обеспечивают оптимальную зону обслуживания СПОИ-СО на каждый момент времени. Точное значение азимута и угла видимости определяют согласно заданному алгоритму. ПЭВМ оператора КОВИ 4 через коммутатор-маршрутизатор 31 соединены с основным внешним абонентом: КЦС 6 КОСПАС, являющимся потребителем аварийной информации о радиобуях. ЖК-панель 37 с консольными переключателями представляют собой устройство, включающее ЖК монитор с клавиатурой и трекболом «мышь», а также консольный переключатель, с помощью которого на экран ЖК монитора можно вывести изображение рабочего стола Windows ПЭВМ оператора КОВИ или изображение которое выводиться на мультимедийный проектор, входящий в состав средства отображения геоинформационных систем 5 СПОИ-СО.
ИИК 1 и КОВИ 4 обмениваются информацией по сети Ethernet, которая допускает значительное удаление (от сотен метров до 1-5 тыс. км) между ИИК 1 и КОВИ 4. В настоящее время в АО «Российские космические системы» расстояние между ИИК 3 и КОВИ4 составляет 200 м.
Средства отображения геоинформационных систем 5 содержат один мультимедийный проектор и один экран, на который выводится спутниковая географическая карта Земного шара (Яндекс, Google) c нанесенными на нее метками радиобуев по координатам, которые вычислены на КОВИ 4 за последние 3 ч (6, 9, 12, 15, 18 или 24 ч). Мультимедийный проектор связан с компьютером КОВИ 4 по VGA кабелю и позволяет вывести на большой экран размером 2х4 (или 6х4 м) картинку Земного шара с координатами мест срабатывания радиобуёв и данными содержащимися в посылке радиобуёв. Эта информация позволяют оператору быстро и точно определить факт и место срабатывания радиобуя, его государственную принадлежность, тип (морской, авиационный, персональный, тестовый, орбитографический и т.д.), серийный номер, и при необходимости зону ответственности поисково-спасательных служб в которой произошло включение радиобуя. Средства отображения позволяют легко определить случайные срабатывания радиобуя в режиме встроенного контроля, На спутниковых картах хорошо видны взлётно-посадочные полосы аэродромов, рядом с которыми, как правило, находятся летательные аппараты (самолеты и вертолеты), где и проходит режим встроенного контроля радиобуя перед взлётом летательного аппарата.
СПОИ-СО работает следующим образом.
ИИК 3 принимают сигналы радиобуёв, ретранслированные через среднеорбитальные ИСЗ «Глонасс», GPS и Galileo. Полноповоротная ААС 7 с рефлектором диаметра 3,5 м принимает сигналы радиобуёв, ретранслированные навигационными ИСЗ систем Глонасс, GPS и Gallileo 1. ВПУ 12 обеспечивает предварительное усиление сигнала и фильтрацию от помех. Оконечный результат времени приема сообщения радиобуя (τi) определяется как момент приема изменения фазы (сверху вниз, от значения 1,1 рад до значения минус 1,1 рад) 25-го бита информации в посылке радиобуя на входе ретранслятора навигационного ИСЗ. Сигналы двух каналов – ретранслированного сигнала радиобуя и навигационного от двух МШУ поступают на два СВЧ-входа АЦПРМ-СО 18 (19), понижаются по частоте, обрезаются по полосе и оцифровываются. Полученные 4÷7 значения несущей частоты (fi, i=4÷7) и времени приёма (τi, i=4÷7) сигнала радиобуя позволяют решить задачу определения координат места бедствия по одной переданной посылке.
Предлагаемая СПОИ-СО обеспечит повышенную точность измерения несущей частоты радиобуёв (fi) на всей длине сообщения (440 мс) радиобуя, что позволит определять местоположение одновременно не менее 150 терпящих бедствие радиобуёв с точностью не хуже 5 км (с вероятностью более 95%) во всей зоне обслуживания СПОИ-СО, в том числе в высоких широтах (выше 70-76о).
Оптимальное планирование наведения средств ААС 7 на среднеорбитальные навигационные ИСЗ для минимизации ошибки определения координат радиобуев (среднее квадратическое отклонение ошибки определения координат должно быть не более 5 км) обеспечивается КОВИ 4 СПОИ-СО, решающего следующие задачи: планирование наведения ААС 7 на ИСЗ с ретрансляторами сигналов радиобуев; определение координат и вектора скорости радиобуя – решение навигационной задачи; формирование и выдача в систему передачи информации по сети Интернет сообщений в КЦС 6; управление работой всех средств СПОИ-СО и решение задач по парированию сбоев и неисправностей в их работе. Программное обеспечение КОВИ 4 СПОИ-СО решает задачу непрерывного круглосуточного приема сигналов радиобуёв, их обработки, обмена целевой, контрольной и управляющей информацией с КЦС 6 КОСПАС.
Входной информацией ВСБ 23 (24) КОВИ 4 являются исходные данные для наведения на навигационные ИСЗ 1; информация от НАП 34 с эфемеридами и частотно-временной последовательностью; информация от системы наведения 11 о текущем положении антенной системы 10; информация о состоянии системы электропитания изделия, получаемая от ИБП 25, 26 и сервера питания 29. Наведение АП 8 на среднеорбитальный ИСЗ осуществляется в автоматизированном режиме по программе с ВСБ 23 (24) либо в ручном режиме с пульта ручного управления 27. Программное обеспечение, обеспечивающее наведения АП 8 на ИСЗ, предусматривает использование стандартных библиотек управления движением двигателей по углу места и азимуту для слежения за ИСЗ без участия оператора. Эфемериды и частотно-временные поправки навигационных ИСЗ поступают в ВСБ 23 (24) от НАП 34 либо по сети Интернет с общедоступного сайта www.celestrak.com/norad. Пульт ручного управления ААС 27 позволяет, при необходимости, вручную навести антенну на ИСЗ при первичной установке, ремонте и т.п. При достижении антенной системой 10 возвратного КВ, антенна останавливается, но может быть выведена из этого положения по программе от ВСБ 23 (24) или от пульта ручного управления 27. При достижении антенной невозвратного КВ, антенна не может быть выведена из этого положения по программе – требуется вмешательство технических специалистов обслуживающих СПОИ-СО. Выходной информацией СПОИ-СО, передаваемой потребителю в лице КЦС 6 КОСПАС, является информация о радиобуях и их координатах, а так же информация о работоспособности СПОИ-СО.
Алгоритмы, используемые ВСБ 23 (24) КОВИ СПОИ-СО, обеспечивают расчёт целеуказаний для наведения ААС 7 на среднеорбитальные навигационные ИСЗ систем Глонасс, GPS и Gallileo 1, содержащие ретрансляторы системы КОСПАС-САРСАТ, для обеспечения по максимальной по площади зоны обслуживания либо минимизации ошибки определения координат радиобуёв для зоны видимости меньшей площади. Данные алгоритм основан на решении задачи выбора из N космических аппаратов созвездия из M аппаратов, наилучшим образом подходящих для наведения антенн СПОИ-СО на среднеорбитальные ИСЗ, исходя из максимума площади зоны обслуживания системы из М среднеорбитальных космических аппаратов при вероятности определения координат радиобуя более 0,95 с ошибкой не более 5 км.
Для решения поставленной задачи на поверхности Земли вводится сетка равноотстоящих друг от друга узлов, то есть создаётся геоинформационная система, в узлах сетки будут размещены источники радиосигнала – аварийные радиобуи. Для каждого из таких узлов вычисляется вероятность того, что его координаты будут вычислены с ошибкой не более 5 км с вероятностью более 0,95, узел включается в зону обслуживания текущего созвездия при выполнении данного условия. Полученное созвездие имеет одномоментную наибольшую площадь. Для полностью развернутой группировки в большинстве случаев за 30 минут площадь обслуживания меняется не более чем на 5% (иногда на 15%). Соответственно, найдя все узлы, отвечающие условиям точности определения местоположения, можно рассчитать одномоментную площадь обслуживания созвездия. Оптимальное для наведения антенн созвездие находится путем полного перебора всех возможных созвездий – 
Таким образом, СПОИ-СО обеспечит при непрерывном круглосуточном функционировании требуемые характеристики приема радиосигналов радиобуёв на частоте 1544,1-2226,0 МГц, с навигационных искусственных спутников Земли, выделение и предварительную обработку цифровой информации радиобуев, решение навигационной задачи, определение широты и долготы радиобуя и передачу достоверной информации от радиобуя с координатами места бедствия в систему связи для передачи данных в КЦС КОСПАС для дальнейшей обработки и распространения информации поисково-спасательным службам и других стран мира.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ СИГНАЛОВ ПОСЫЛОК РАДИОБУЕВ В КОСМИЧЕСКОЙ СИСТЕМЕ ПОИСКА И СПАСАНИЯ | 2015 |
|
RU2592050C1 |
| АВТОНОМНЫЙ ПУНКТ ПРИЕМА ГЕЛИОГЕОФИЗИЧЕСКОЙ ИНФОРМАЦИИ | 2012 |
|
RU2510934C1 |
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2340004C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| МНОГОЦЕЛЕВАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2360848C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА РЕТРАНСЛЯЦИИ ДЛЯ ИНФОРМАЦИОННОГО ОБМЕНА С КОСМИЧЕСКИМИ И НАЗЕМНЫМИ АБОНЕНТАМИ | 2011 |
|
RU2503127C2 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2015 |
|
RU2595328C1 |
| ЦИФРОВОЙ КОМПЛЕКС СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ | 2016 |
|
RU2633911C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2016 |
|
RU2629000C1 |
Изобретение относится к технике связи и может использоваться в системах космической связи. Технический результат состоит в повышении надежности связи и точности определения координат радиобуев. Для этого станция приёма информации от аварийных радиобуев космической системы поиска и спасания включает единый комплекс обработки и выдачи информации, содержащий аппаратно-программные средства определения координат и вектора скорости радиобуя и управления наведением антенн, выполненных полноповоротными, на среднеорбитальные ИСЗ спутниковых навигационных систем, а также средства отображения информации. Комплекс обработки и выдачи информации подключён к средствам обработки информации упомянутого информационно-измерительного комплекса через коммутатор-маршрутизатор и сеть типа Ethernet и обеспечивает управление оборудованием данного комплекса. Способ управления наведением антенн предусматривает наведение антенн станции (системы) приёма и обработки информации в течение заданного временного интервала на созвездие из среднеорбитальных космических аппаратов с наибольшей площадью зоны обслуживания, в которой обеспечивается заданная точность определения координат радиобуев. 2 н. и 7 з.п. ф-лы, 3 ил.
1. Станция приема и обработки информации от среднеорбитального сегмента космической системы поиска и спасания, представляющая собой несколько информационно-измерительных комплексов, содержащих взаимосвязанные между собой
совокупность средств приема сигналов от среднеорбитальных ИСЗ спутниковых навигационных систем с установленными на них ретрансляторами сигналов аварийных радиобуев и
совокупность соответствующих средств обработки информации, взаимодействующих с антенными постами, а также средства управления и внешнего интерфейса, отличающаяся тем, что включает
единый комплекс обработки и выдачи информации, содержащий
основной и резервный вычислительные системные блоки - высокоскоростные серверы - для
определения координат и вектора скорости радиобуя и
управления азимутально-угломестным наведением антенн, выполненных полноповоротными, на среднеорбитальные ИСЗ спутниковых навигационных систем, а также
средства отображения информации, причем
данные вычислительные системные блоки - высокоскоростные серверы комплекса обработки и выдачи информации - подключены через коммутатор-маршрутизатор к
координационному центру космической системы поиска и спасания,
средствам отображения геоинформационных систем, а также посредством сети типа Ethernet - к средствам обработки информации упомянутого информационно-измерительного комплекса для обеспечения управления оборудованием информационно-измерительного комплекса.
2. Станция по п. 1, отличающаяся тем, что оборудование упомянутого информационно-измерительного комплекса включает
активную антенную систему, в состав которой входит указанный антенный пост с параболической полноповоротной двухосной антенной, внешним приемным устройством, содержащим облучатели и малошумящие усилители со встроенными полосовыми фильтрами, и системой наведения, а также коммутационный шкаф,
шкаф управления на базе промышленных контроллеров, соединенный с коммутационным шкафом,
аппаратную стойку, на которой расположен основной и резервный вычислительные системные блоки, к которым подключены
шкаф управления (через шину типа Profibus), коммутатор-маршрутизатор информационно-измерительного комплекса, обеспечивающий соединение с упомянутым коммутатором комплекса обработки и выдачи информации, жидкокристаллическая консоль, а также
основной и резервный аналого-цифровые приемники сигнала от среднеорбитальных ИСЗ, содержащие
канал приема сигналов от аварийных радиобуев и канал приема навигационного сигнала и соединенные с внешним приемным устройством антенного поста.
3. Станция по п. 2, отличающаяся тем, что аналого-цифровой приемник сигнала от среднеорбитальных ИСЗ информационно-измерительного комплекса обеспечивает
модуляцию принятых сигналов посылок аварийных радиобуев достоверной цифровой информацией, заложенной в сигналы, передаваемые радиобуем, и выделенной из принятых сигналов в процессе его демодуляции и декодирования, взятой с обратным знаком.
4. Станция по п. 1, отличающаяся тем, что комплекс обработки и выдачи информации подключен через
коммутатор-маршрутизатор данного комплекса к по меньшей мере четырем информационно-измерительным комплексам, аналогичным упомянутому, размещенным компактно на заданной территории или удаленным от него, то есть
минимальное количество используемых информационно-измерительных комплексов и соответственно трактов приема сигнала от аварийных радиобуев составляет четыре.
5. Станция по п. 4, отличающаяся тем, что максимальное количество используемых информационно-измерительных комплексов и соответственно трактов приема сигнала от аварийных радиобуев составляет семь.
6. Станция по п. 1, отличающаяся тем, что оборудование упомянутого комплекса обработки и выдачи информации представляет собой серверную стойку, на которой размещены
упомянутые основной и резервный высокоскоростные серверы (вычислительные системные блоки), к которым подключены навигационный приемник, коммутатор-маршрутизатор, жидкокристаллическая консоль.
7. Станция по п. 1, отличающаяся тем, что средства отображения геоинформационных систем включают мультимедийный проектор, подключенный к серверу упомянутого комплекса обработки и выдачи информации, экран и средства отображения спутниковых карт.
8. Станция по любому из предшествующих пунктов, отличающаяся тем, что представляет собой совокупность стандартизированных изделий.
9. Способ управления наведением антенн станции приема и обработки информации по любому из пп. 1-8, предусматривающий
наведение в определенный момент времени М антенн станции приема и обработки информации на М аппаратов, выбранных из N среднеорбитальных ИСЗ, причем М<N, отличающийся тем, что
используют геоинформационную систему, в которой на карту земной поверхности нанесена сетка с равностоящими друг от друга узлами,
для упомянутых узлов геоинформационной системы рассчитывают контрольный параметр, например точность, ошибку в определении координат источника радиосигнала с заданной вероятностью, определенных по измерениям, полученным от ИСЗ для каждого конкретного варианта выбора М ИСЗ из N возможных, и выбирают узлы зоны обслуживания с приемлемым заданным уровнем контрольного параметра,
формируют группу узлов зон обслуживания для каждого созвездия из М среднеорбитальных ИСЗ, видимого станцией приема и обработки информации в заданный момент времени,
сравнивают количество узлов зоны обслуживания в упомянутых группах и
выбирают для наведения М антенн станции приема и обработки информации в течение заданного временного интервала созвездие из М среднеорбитальных космических аппаратов с наибольшим числом узлов зоны обслуживания в упомянутой группе.
| 0 |
|
SU100836A1 | |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| НАВИГАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2007 |
|
RU2365061C2 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

