Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации и спутниковый способ навигации, и может быть использовано при осуществлении навигации ЛА, в том числе навигации высокодинамичных ЛА в сложных навигационных условиях, характеризующихся повышенным уровнем изменчивости состава рабочего созвездия (СРС) навигационных спутников.
Известен спутниковый способ навигации ЛА по N навигационным спутникам Земли (НС), формирующим рабочее созвездие, который включает прием сигналов на борту ЛА и вычисление по упомянутым сигналам навигационных параметров ЛА, например [1, 2]. Однако в ряде ситуаций, обусловленных нестандартными условиями приема спутниковых сигналов, например при пропадании сигналов спутников из-за наличия частичных затенений приемной спутниковой антенны или вследствие крена и/или тангажа ЛА, точность спутниковых навигационных определений существенно падает и при некоторых значениях указанных факторов спутниковые местоопределения становятся невозможными, так как в зону радиовидимости спутниковой антенны ЛА попадает недостаточное количество НС. При восстановлении горизонтального полета ЛА (при уменьшении углов крена и тангажа) в спутниковой аппаратуре происходит снова поиск рабочих спутников, слежение за ними, выделение информации и измерение навигационных параметров, по которым определяются псевдодальности и псевдоскорости относительно каждого радиовидимого НС. Такой режим работы спутниковой аппаратуры обладает дополнительным уменьшением времени непрерывных местоопределений, что отрицательно сказывается на выполнении ЛА целевых задач. Кроме того, при изменении состава рабочего созвездия при кренах и/или тангажах ЛА в оценках координат появляются разрывы непрерывности второго рода, скачки, что усложняет работу устройств, на вход которых подаются данные навигационных местоопределений.
Одним из способов повышения точности навигационных определений ЛА в обозначенных нештатных ситуациях является комплексное использование спутникового способа навигации (ССН) и инерциального способа навигации (ИСН), осуществляемого инерциальной системой на борту ЛА [3-6].
В патенте [3] фирмы «Лазекс» решается задача повышения точности инерциально-спутниковой системы в условиях отсутствия достаточного количества радиовидимых навигационных спутников или при возможном неустойчивом радиоконтакте со спутниками радионавигационной системы. Кроме того, достигается также повышение показателя непрерывности навигации при продолжительном отсутствии сигналов спутников и повышение отказоустойчивости системы за счет алгоритмического резервирования. Указанные эффекты достигаются за счет коррекции данных от инерциальных датчиков по результатам спутниковых измерений на интервалах доступности и полноты и использовании спрогнозированных значений отсутствующих в результатах измерений псевдодальностей на основе альманаха спутников и уточненных на предыдущем этапе значений текущих характеристик движения ЛА, полученных инерциально-спутниковым способом навигации.
Недостатками такого способа являются отсутствие возможности управления составом рабочего созвездия с учетом угловой ориентации ЛА в пространстве (в дальнейшем «ориентации») и недостаточно точное представление корреляционной матрицы погрешностей этого способа комплексирования информации спутникового способа навигации и инерциального способа навигации, что приводит к снижению точности и достоверности навигационных определений.
Кроме того, в патенте [3] использованы различающиеся алгоритмы решения навигационной задачи при полном и неполном рабочих созвездиях навигационных спутников. При достаточном количестве НС в рабочем созвездии, N≥4, сигналы которых принимаются с допустимой точностью, для комплексирования измерений от спутниковой системы с измерениями от инерциальных датчиков используются данные в виде координат ЛА и скоростей их изменения. При неполном рабочем созвездии НС, N<4, расчет координат ЛА производится путем добавления к измеренным псевдодальностям, соответствующим «радиовидимым» НС, спрогнозированных псевдодальностей до тех НС, которые на текущий момент времени по каким-либо причинам, вызвавшим нештатную ситуацию, не приняты спутниковым приемником. Наличие таких двух различных алгоритмов решения задачи комплексирования данных по ССН и ИСН в рамках одного вычислительного комплекса приводит к усложнению программного обеспечения и к дополнительным скачкам координат на выходе инерциально-спутниковой навигационной системы. Этих недостатков лишены решения, предложенные в патентах [4-6].
В патентах [4-6] при комплексировании данных от спутниковой системы и инерциальных датчиков используются данные от спутниковой системы при любом составе рабочего созвездия. Координаты и скорости их изменения определяются в результате совместной обработки всей имеющейся информации, поступающей от спутников и от инерциальных датчиков. Однако и этим способам присущи недостатки, такие как отсутствие возможности управления рабочим созвездием НС с учетом угловой ориентации ЛА и недостаточно точное представление этого способа (в виде корреляционной матрицы погрешности) при комплексирования информации ССН и ИСН, что приводит к уменьшению точности и достоверности навигационных определений.
Общим недостатком известных способов является отсутствие учета влияния изменения СРС НС на работу алгоритма совместной обработки данных инерциального и спутникового способов навигации, что вызывает снижение точности оценивания координат ЛА в сложных навигационных условиях, например в широком диапазоне изменения углов ориентации. При изменении СРС НС оценивание координат ЛА спутниковым способом навигации сопровождается скачкообразными переходными процессами, приводящими к снижению точности и непрерывности оценивания координат ЛА комплексным инерциально-спутниковым способом навигации.
Способ инерциально-спутниковой навигации, защищенный патентом [4], является прототипом заявляемого изобретения. Способ-прототип [4], состоит в том, что производится совместная обработка входных данных о положении ЛА, формируемых независимо инерциальными датчиками, вырабатывающими векторы угловой скорости и ускорения ЛА, барометрическим высотомером и спутниковым приемником глобальной навигационной спутниковой системы с известным альманахом спутников и определяемым в полете ЛА составом рабочего созвездия спутников, при этом во входной обработке формируют данные о положении ЛА инерциальным способом, вычисляя их на основе показаний инерциальных датчиков и баровысотомера, параллельно выделяют данные о положении ЛА, определяемые спутниковым способом в спутниковом приемнике, а в выходной обработке на основе упомянутых оценок инерциального и спутникового способов выполняют оценку ошибок инерциального способа с помощью расширенного фильтра Калмана (ФК), а далее выполняют коррекцию ошибок инерциального способа во входной обработке и определяют уточненное положение ЛА в виде разности оценок положения ЛА, определенных инерциальным способом, и упомянутых оценок ошибок инерциального способа.
Так как в прототипе не указано конкретно, в каких характеристиках проводится оценка положения ЛА спутниковым способом, то будем считать, что в общем случае оценка положения может производиться в любых данных, формируемых спутниковым способом.
Серьезным недостатком способа-прототипа, как и перечисленных выше аналогов, является отсутствие учета влияния изменения состава рабочего созвездия на работу алгоритма совместной обработки данных инерциального и спутникового способов навигации, приводящее к снижению точности оценивания координат ЛА в сложных навигационных условиях.
Задачей заявляемого способа является повышение точности оценивания координат ЛА в сложных навигационных условиях благодаря тому, что выполняется формирование данных рабочего созвездия спутников на основе информации об ориентации ЛА.
Кроме того, непрерывное формирование данных СРС с учетом ориентации ЛА облегчает условия поиска сигналов НС в спутниковом способе навигации, дополнительно решает задачу ускорения переходных процессов на выходе спутникового приемника, что повышает непрерывность спутниковых измерений, а также обеспечивает многофункциональность способа, исключая необходимость дополнительного сглаживания и фильтрации навигационных данных у потребителей инерциально-спутниковых измерений.
Поставленная задача решаются следующим образом.
Предлагается способ инерциально-спутниковой навигации ЛА, состоящий в том, что производится совместная обработка входных данных о положении ЛА, формируемых независимо инерциальными датчиками (ИД), вырабатывающими векторы угловой скорости и ускорения ЛА, барометрическим высотомером и спутниковым приемником с известным альманахом спутников и определяемым в полете ЛА составом рабочего созвездия спутников, при этом во входной обработке формируют оценки данных о положении ЛА инерциальным способом, вычисляя их на основе показаний ИД и баровысотомера, параллельно выделяют оценки положения ЛА, определяемые спутниковым способом в спутниковом приемнике, а в выходной обработке на основе упомянутых оценок инерциального и спутникового способов выполняют оценку ошибок инерциального способа с помощью расширенного фильтра Калмана, а далее выполняют коррекцию ошибок инерциального способа во входной обработке и определяют уточненное положение ЛА в виде разности оценок положения ЛА, определенных инерциальным способом, и упомянутых оценок ошибок инерциального способа, кроме того, между входной и выходной обработками производят промежуточную обработку, включающую формирование данных рабочего созвездия на основе уточненного положения ЛА и информации об ориентации ЛА, альманахе спутников, диаграмме направленности антенны спутникового приемника, а также формирование корреляционной матрицы ошибок измерений спутникового приемника на основе данных рабочего созвездия спутников, а затем в выходной обработке выполняют оценку ошибок инерциального способа с учетом ориентации ЛА.
Предлагается вариант способа, раскрывающий конкретный состав и порядок выполняемых действий, который состоит в том, что во входной обработке при формировании оценок положения ЛА инерциальным способом вычисляют элементы оператора преобразования из связанной системы координат (ССК) ЛА в навигационную систему координат (НСК), используя измерение вектора угловой скорости, и корректируют упомянутые элементы оператора с помощью оценок ошибок инерциального способа на выходе фильтра Калмана, вычисляют вектор ускорения в НСК, используя откорректированный оператор преобразования, затем вычисляют скорости и координаты ЛА, параллельно во входной обработке при формировании данных рабочего созвездия выделяют из оценок положения ЛА спутниковым способом измерения псевдодальностей и псевдоскоростей, а также отношения сигнал/шум, а в промежуточной обработке проводят выбор рабочего созвездия спутников, исключая близкие к горизонту спутники, на основе информации об альманахе спутников и уточненных оценок параметров ЛА, проводят формирование векторов направления на спутники, используя информацию об ориентации ЛА в виде откорректированного оператора преобразования, а затем определяют весовые коэффициенты спутников, сопоставляя направления на спутники и диаграмму направленности антенны спутникового приемника, а далее формируют корреляционную матрицу ошибок спутникового способа с учетом весовых коэффициентов и отношений сигнал/шум для спутников рабочего созвездия, причем при вычислении оценок ошибок инерциального способа с помощью фильтра Калмана используют упомянутую корреляционную матрицу (КМ) ошибок спутникового способа.
Предлагается также вариант способа, в котором дополнительно проводят целевое управление поиском спутников рабочего созвездия путем формирования команд поиска спутников, при этом упомянутое формирование команд осуществляют после формирования данных рабочего созвездия спутников с учетом ориентации ЛА, а упомянутые команды поиска используют для управления режимом спутникового приемника через его управляющий вход.
Суть заявляемого способа поясняется с помощью Фиг.1, 2 и 3.
На Фиг.1 представлена блок-схема основной последовательности операций предложенного способа с промежуточной обработкой данных.
На Фиг.2 раскрыт вариант последовательности операций предложенного способа во входной и промежуточной обработке данных.
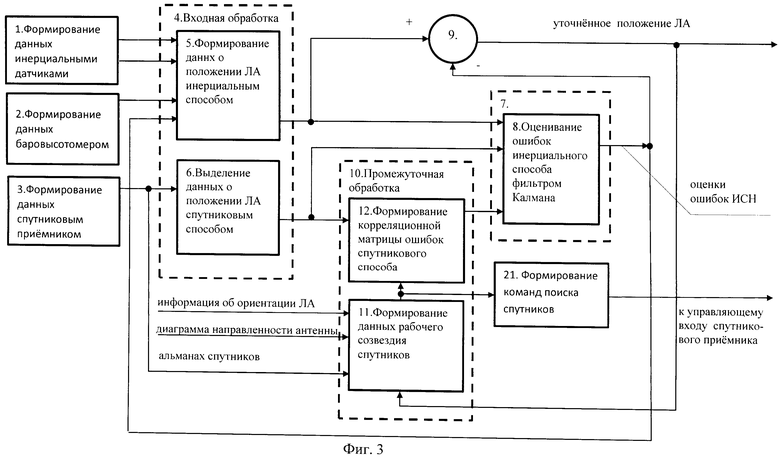
На Фиг.3 представлен вариант способа с управлением режимом спутникового приемника.
Способ согласно Фиг.1 включает характерные для способа-прототипа операции: формирование входных данных инерциальными датчиками (ИД) 1, баровысотомером (БВ) 2 и спутниковым приемником (СПР) 3, входную обработку упомянутых данных 4, включающую в себя формирование данных о положении ЛА инерциальным способом навигации 5 и выделение данных о положении ЛА спутниковым способом 6, а также выходную обработку 7, в которой на основе упомянутых оценок инерциального и спутникового способов выполняют оценивание ошибок ИСН с помощью расширенного фильтра Калмана 8, а далее проводят коррекцию ошибок инерциального способа во входной обработке при формировании оценок положения ЛА инерциальным способом навигации и определяют уточненное положение ЛА 9 в виде разности оценок положения ЛА, определенных ИСН, и упомянутых оценок ошибок ИСН.
Предложены новые операции, реализующие заявленный способ. Новизна способа состоит в том, что (см. Фиг.1) между входной 4 и выходной 7 обработками вводят промежуточную обработку 10, включающую в себя формирование данных рабочего созвездия НС 11 на основе уточненного положения ЛА и информации об ориентации ЛА, альманахе спутников, диаграмме направленности антенны спутникового приемника, а далее проводят формирование корреляционной матрицы ошибок спутникового способа навигации 12 на основе данных рабочего созвездия спутников.
В прототипе и аналогах выбор рабочего созвездия выполняется на основе альманаха и уточненного положения ЛА. При этом определяются спутники, видимые в данной точке поверхности Земли, и производится поиск и измерение параметров спутниковых сигналов. Так как антенна спутниковой системы ЛА предназначена для обслуживания верхней полусферы [1, 2], изменение ориентации ЛА (например, при крене) приводит к нарушению приема сигналов некоторых спутников, срыву слежения и появлению аномальных ошибок в спутниковых данных.
Использование информации об ориентации ЛА и диаграмме направленности антенны позволяет оценить качество данных рабочего созвездия спутников и выделить спутники с надежным приемом сигналов, обладающие в связи с этим большей предпочтительностью при использовании в обработке данных.
Таким образом, формирование корреляционной матрицы ошибок спутникового способа 12 выполняется с учетом этой предпочтительности, зависящей от ориентации ЛА. Элементы корреляционной матрицы ошибок составляются с учетом каждого видимого спутника. Обычно оценка предпочтительности спутников проводится в виде присваиваемых коэффициентов, например "весовых коэффициентов". В результате в фильтре Калмана используются данные промежуточной обработки 10 в виде элементов корреляционной матрицы ошибок спутникового способа 12. Это влияет на общий результат оценивания ошибок ИСН, при этом данные спутников с ненадежным приемом сигналов и, соответственно, большими ошибками обрабатываются в фильтре Калмана с малым весом.
Таким образом, учет ориентации ЛА и введение промежуточной обработки позволяет уточнить положение ЛА, определяемое комплексным инерциально-спутниковым способом.
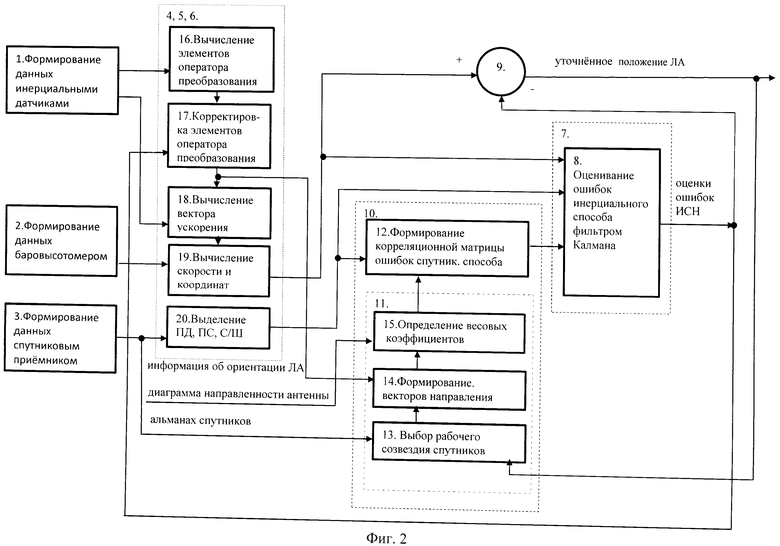
На Фиг.2 представлено возможное выполнение новых операций варианта способа. Согласно Фиг.2 в этом варианте используются характерные для способа-прототипа операции: формирование входных данных инерциальными датчиками 1, баровысотомером 2 и спутниковым приемником 3, входная обработка упомянутых данных 4, включающая в себя формирование оценок положения ЛА инерциальным способом 5 и выделение оценок положения ЛА спутниковым способом 6, а также выходная обработка 7, в которой на основе упомянутых оценок инерциального и спутникового способов выполняют оценивание ошибок инерциального способа с помощью расширенного фильтра Калмана 8, и далее проводят коррекцию ошибок инерциального способа во входной обработке при формировании оценок положения ЛА инерциальным способом навигации и определяют уточненное положение ЛА 9 в виде разности оценок положения ЛА, определенных ИСН, и упомянутых оценок ошибок ИСН.
Формирование данных рабочего созвездия НС 11 выполняется следующими последовательными операциями: выбор рабочего созвездия спутников 13 с помощью данных альманаха спутников, уточненного положения ЛА 9 и допустимого угла места НС относительно горизонта ЛА (горизонтальной плоскости в точке расположения ЛА). Далее - формирование векторов направления выбранных НС 14 на основе информации об ориентации ЛА и определение весовых коэффициентов НС 15 на основе диаграммы направленности антенны спутникового приемника. Весовые коэффициенты используются далее для формирования корреляционной матрицы ошибок измерений спутникового способа 12 на основе данных спутникового приемника об отношении сигнал/шум.
Кроме того, на Фиг.2 раскрыто содержание традиционных для ИСН операций входной обработки 4: формирование оценок положения ЛА инерциальным способом 5 включает в себя вычисление элементов оператора преобразования координат в НСК 16, корректировку элементов оператора преобразования координат в НСК 17, вычисление вектора ускорения в НСК 18 и вычисление скорости и координат 19.
При выделении данных о положении ЛА спутниковым способом 6 целесообразно в предложенном способе производить выделение псевдодальностей (ПД), псевдоскоростей (ПС) и отношений сигнал/шум (С/Ш) спутникового приемника 20.
Существенная новизна предлагаемого варианта способа на Фиг.2 по сравнению с вариантом на Фиг.1 заключается в использовании оператора преобразования, вычисляемого и корректируемого в 16 и 17, для формирования векторов направления на спутники 14 и определения весовых коэффициентов 15, зависящих от диаграммы направленности антенны, уточненного положения ЛА и ориентации ЛА. Использование информации об ориентации ЛА и о диаграмме направленности антенны позволяет оценить качество данных рабочего созвездия спутников с помощью весовых коэффициентов и выделить спутники с надежным приемом сигналов.
Таким образом, формирование корреляционной матрицы ошибок спутникового способа 12 выполняется с учетом весовых коэффициентов, зависящих от ориентации ЛА. Благодаря этому данные спутников с ненадежным приемом сигналов и, соответственно, большими ошибками обрабатываются в ФК с малым весом.
В варианте способа на Фиг.3 дополнительно включена операция формирования команд поиска спутников 21. Эта операция использует данные рабочего созвездия спутников и создает на управляющем входе спутникового приемника команды поиска спутников с надежным приемом сигналов. При этом поиск спутников со слабым или искаженным сигналом из-за пространственной ориентации антенны сигналами не производится. Например, при больших углах крена возможен захват ложных сигналов, отраженных от поверхности Земли. Таким образом, исключается возможность появления аномальных ошибок в спутниковых данных.
Ниже приводится математическое описание работы предложенного способа.
При формировании входных данных ИД 1, установленными на корпусе ЛА, вырабатываются вектор угловых скоростей и вектор ускорений в связанной системе координат, например крен-тангаж-рысканье (Roll-Pitch-Yaw - RPY). Для преобразования вектора ускорений в навигационную систему координат НСК, например Север-Восток-низ (North-East-down - NED), необходимо вычислить элементы оператора преобразования координат в НСК 16 и выполнить данное преобразование. С этой целью можно применить матрицу направляющих косинусов или кватернион преобразования [8].
Матрица направляющих косинусов вычисляется путем решения дифференциального уравнения (Пуассона) [7], в котором используется вектор угловой скорости, измеренный ИД 1. Кватернион преобразования также получается путем решения аналогичного дифференциального уравнения, содержащего вектор угловой скорости.
При наличии матрицы направляющих косинусов 


где Ψ - вектор оценок ошибок угловой ориентации, определенный в ФК; Ψ=(ΔαΔβΔγ)T; [Ψ×] - матрица векторного произведения:
При использовании кватерниона 









Так как преобразование координат всегда выполняется в бортовой инерциальной системе, его можно также использовать при формировании векторов направлений НС 14 в ССК ЛА и последующим определением весовых коэффициентов 15 с учетом влияния диаграммы направленности антенны.
После корректировки элементов оператора преобразования 17 вычисляется вектор ускорения в навигационной системе координат 18 и выполняется интегрирование (вычисление скорости и координат 19) преобразованного вектора ускорений 
Спутниковый приемник 3 вырабатывает псевдодальности, псевдоскорости, отношения сигнал/шум. Эти операции показаны на Фиг.1: выделение данных о положении ЛА спутниковым способом 6, а также на Фиг.2: выделение ПД, ПС и отношений С/Ш 6 (20). Промежуточная обработка 10 согласно Фиг.2 включает в себя формирование данных рабочего созвездия спутников 11 (в том числе формирование векторов направления НС 14 и определение весовых коэффициентов 15 и формирование корреляционной матрицы ошибок ССН 12).
При формировании векторов направления НС 14 с помощью альманаха НС и уточненного положения ЛА вычисляются углы места γ и азимута α доступных спутников в навигационной системе координат (эта операция не отличается от действий, выполняемых в обычном спутниковом приемнике [1]). Угол места спутника в навигационной системе координат отсчитывается относительно горизонта, а угол азимута - относительно направления на Север. Спутники с малым углом места γ (например, менее 5 градусов) в навигационной системе координат отбраковываются. Направление на спутник в навигационной системе координат при этом характеризуется вектором:
Nn=[cosγ cosα cosγ sinα -sinγ].
Затем формируются векторы направлений НС 14 в связанной системе координат с помощью транспонированной матрицы 
При определении весовых коэффициентов 15 используются данные о диаграмме направленности антенны спутникового приемника с известными характеристиками. Если диаграмма направленности антенны задана в координатах азимут - угол места, тогда необходимо вычислить эти углы в связанной системе координат ССК. Например, если вектор направления 
При этом коэффициент усиления антенны Kант в направлении на спутник Nb, сравнивается с порогом и в контролируемом рабочем созвездии оставляются спутники, для которых коэффициент усиления антенны превышает порог. Для оставшихся в контролируемом рабочем созвездии спутников коэффициент усиления антенны определяет информационный вес данного спутника при решении навигационной задачи.
При формировании корреляционной матрицы ошибок ССН 12 учитываются шумовые ошибки измерений ПД и ПС в спутниковом приемнике, а также упомянутая величина Kант.
Оценка точности измерений ПД по отношению к шумовой ошибке в спутниковом приемнике выполняется с помощью формулы для расчета дисперсии ошибки измерения [9]:
где Δf - полоса пропускания системы слежения за задержкой дальномерного кода; τ - длительность элементарного символа кода; B - полоса пропускания спутникового приемника; Q - отношение сигнал/шум, т.е. отношение мощностей сигнала спутника и шума в полосе 1 Гц (величина Q измеряется в дБ Гц).
Например, для GPS τ=1 мкс. При Q=40 дБ Гц, Δf=1 Гц и B=15 МГц имеем среднеквадратичное значение ошибки измерения ПД 2 нс или 0,6 м.
С целью определения информационного веса данного спутника при решении навигационной задачи дополнительно используется функциональное преобразование величины Kант, например, вида:

где 
После вычисления 
При формировании значений диагональных элементов корреляционной матрицы ошибок ССН 12, соответствующих ошибкам ПС, поступают аналогично. Если параметры системы слежения за несущей (системы ФАПЧ) в спутниковом приемнике оптимизированы при действии шума, то полоса пропускания контура второго порядка определяется из выражения 
где Δfω - полоса пропускания системы ФАПЧ.
С целью определения информационного веса данного спутника при решении навигационной задачи дополнительно используется функциональное преобразование величины Kант аналогичное приведенному ранее.

где a 2 - масштабный коэффициент (в общем случае отличный от a 1), обеспечивающий выключение спутника из решения ФК при малых значениях Kант.
После вычисления 
Корреляционная матрица ошибок ССН 12 совместно с результатами операций 19 и 20 используется в выходной обработке 7 в алгоритме оценивания ошибок инерциального способа расширенным фильтром Калмана 8. Ошибки измерения положения объекта X инерциальным способом описываются векторным дифференциальным уравнением [8]:
где X - вектор состояния ошибок измерения координат инерциальной системой; U - вектор погрешностей инерциальных датчиков; F - матрица системы дифференциальных уравнений; W - матрица преобразования.
Упомянутый вектор состояния содержит ошибки измерения положения, скорости и угловой ориентации:
X=(Δx Δy Δz Δvx Δvy Δyz Δα Δβ Δγ)T,
где Δx, Δy, Δz - ошибки измерения координат в НСК, причем ось x направлена на Север, ось y - на Восток, ось z - вниз; Δvx, Δvy, Δvz - ошибки измерения скорости; Δα, Δβ, Δγ - ошибки угловой ориентации ИНС.
Матрица системы дифференциальных уравнений выбирается в зависимости от класса инерциальной навигационной системы. В системах тактического класса при ограниченной точности датчиков угловой скорости не учитывают угловую скорость вращения Земли [8]. Тогда матрица имеет вид:
где µ=(R+h)-1; η=-tgB(R+h)-1; R - радиус Земли; h - высота расположения ЛА над поверхностью Земли; В - широта ЛА.
Вектор U содержит ошибки датчиков ускорений и угловых скоростей в связанной системе координат
U=(Δa x1 Δa y1 Δa z1 Δωx1 Δωy1 Δωz1)T.
Матрица преобразования равна
Дифференциальное уравнение для вектора X дополняется дифференциальными уравнениями для вектора ошибок инерциальных датчиков U, а также уравнениями для ошибки измерения времени t и скорости ухода часов νt спутникового приемника. В результате образуется новый n-мерный вектор состояния: Y=(XTUTtvt)T.
Разностное уравнение состояния в дискретном времени i имеет вид:
Y(i+1)=ФY(i)+V(i),
где V(i) - n-мерный вектор дискретного белого шума с известной корреляционной матрицей Qv;
Уравнение наблюдения содержит измеряемые спутниковым приемником 3 навигационные параметры - псевдодальности и псевдоскорости - и поэтому имеет вид:
Z(i)=(ZПД(i)ZПС(i))T,
где ZПД(i) - вектор измерений ПД; ZПС(i) - вектор измерения ПС.
Вектор ПД состоит из m элементов вида:


Вектор ПС также содержит m элементов вида

где νx(i), νy(i) и νz(i) - элементы вектора скорости, измеренного инерциальным способом; 



Оптимальная оценка вектора состояния 
где 




элементы вектора 

K(i) - оптимальный коэффициент усиления.
Величина K(i) определяется выражениями:

P-(i)=ФР(i-1)ФТ+Qν,
где Р(i) и Р-(i) - корреляционные матрицы ошибок фильтрации и экстраполяции вектора состояния объекта; 
Измерения ИСН используются при формировании значений уточненных положения и скорости ЛА. При этом из измерений ИСН вычитаются значения соответствующих оценок ошибок ИСН (ошибки измерения положения и скорости), содержащиеся в оценке вектора состояния 

Для отбракованных в связанной системе координат спутников, не вошедших в контролируемое рабочее созвездие, также фиксируется 3-я компонента вектора Nb-n3. Для этих спутников в спутниковый приемник с целью его вычислительной разгрузки передается команда запрета поиска сигнала. Вместе с тем, эта компонента продолжает вычисляться. Кроме того, вычисляется ее первая разность. Текущее значение компоненты n3 в сумме с первой разностью (n3+Δn3) дает прогнозируемое (экстраполированное) значение, которое сравнивается с нулевым (или близким к нему) порогом и в случае превышения порога в спутниковый приемник передается команда разрешения поиска сигнала данного спутника. Предложенные операции позволяют выполнять целенаправленный поиск сигналов спутников с учетом угловой ориентации ЛА, что ускоряет обнаружение сигналов и формирование соответствующих измерений, т.е. повышает непрерывность измерений.
Таким образом, выше показана новизна и полезность предложенного способа.
Подчеркнем, что новизна способа состоит, в первую очередь, в предложенной принципиально новой операции - промежуточной обработке, учитывающей изменение ориентации ЛА в пространстве, что достигается формированием данных о рабочем созвездии спутников как функции ориентации ЛА, а далее с помощью этих данных формирования корреляционной матрицы ошибок спутникового способа, уточнение которой, в свою очередь, позволяет увеличить точность оценивания ошибок в фильтре Калмана и определять уточненное положение ЛА.
Кроме того, показана целесообразность использования в комплексном способе в качестве данных, формируемых спутниковым способом, псевдодальности, псевдоскорости и отношения сигнал/шум на входе спутникового приемника. Это позволяет обеспечить непрерывность оценок способа при составе рабочего созвездия менее четырех спутников.
Предложено формировать изменяющиеся данные рабочего созвездия путем определения векторов направления на спутники и весовых коэффициентов для каждого спутника.
Показана также возможность активного управления составом рабочего созвездия путем воздействия на вход спутникового приемника команд поиска спутников, принимаемых антенной в зависимости от ориентации ЛА, что сокращает переходные процессы в спутниковом приемнике.
При отработке способа и испытаниях системы в качестве бортовых и наземных приемников использовались приемные модули типа «JNS100» и «Legacy» фирмы «Javad GNSS», выполненные с кодовыми и фазовыми выходами. В качестве вычислительных устройств использовались стандартные модули типа СМ420 фирмы «Ampro». В качестве линии передачи данных использовался канал серийно выпускаемой аппаратуры «ЛККС-А-2000» производства фирмы «СПЕКТР».
Результаты испытаний показали, что использование предложенных способа и системы повышает на 35-40% точность определения координат при выполнении посадки ЛА.
Источники информации
1. Сетевые спутниковые радионавигационные системы / Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. Под ред. B.C. Шебшаевича. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993. - 408 с.
2. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. - 4-е изд., перераб. и доп. - М.: Радиотехника. - 800 с.
3. Патент РФ 2334199, кл. G01C 23/00, заявл. 19.03.2007, опубл. 20.09.2008.
4. Patent EP 1837627 A2, кл. G01C 21/28, заявл. 07.03.2007, опубл. 26.09.2007.
5. Patent EP 202637 A2, кл. G01C 21/16, заявл. 12.08.2008, опубл. 18.02.2009.
6. Patent USA №7,873,472 B2, кл. G01C 21/00, заявл. 11.02.2010, опубл. 18.01.2011.
7. Г. Корн, Т. Корн. Справочник по математике. "Наука", 1973.
8. D.H. Titterton, J.L. Weston. Strapdown Inertial Navigation Technology. Second Edition, MIT, 2007.
9. Радиоавтоматика: учеб. пособие для студ. высш. учеб. заведений / А.И. Соколов, Ю.С. Юрченко. - М.: Издательский центр «Академия», 2011. - 272 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2015 |
|
RU2595328C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| ОТКАЗОУСТОЙЧИВАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА С ИЗБЫТОЧНЫМ КОЛИЧЕСТВОМ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2014 |
|
RU2570358C1 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации и спутниковый способ навигации, и может быть использовано при осуществлении навигации ЛА, в том числе навигации высокодинамичных ЛА в сложных навигационных условиях, характеризующихся повышенным уровнем изменчивости состава рабочего созвездия навигационных спутников. Способ состоит в том, что между входной и выходной обработками данных инерциальных датчиков и спутникового приемника с использованием для комплексной обработки фильтра Калмана производят промежуточную обработку, учитывающую ориентацию ЛА в пространстве. Она включает: формирование данных рабочего созвездия на основе уточненного положения ЛА и информации об ориентации ЛА, альманахе спутников, диаграмме направленности антенны спутникового приемника, а также формирование корреляционной матрицы ошибок измерений спутникового приемника на основе данных рабочего созвездия спутников. Предложен вариант способа, в котором в промежуточной обработке проводят выбор рабочего созвездия спутников, формирование векторов направления на спутники, определяют весовые коэффициенты спутников, сопоставляя направления на спутники и диаграмму направленности антенны спутникового приемника, и формируют корреляционную матрицу ошибок спутникового способа с учетом весовых коэффициентов и отношений сигнал/шум для спутников рабочего созвездия. Предложен вариант способа с целевым управлением поиском рабочего созвездия спутников. Результатом использования способа является оценивание координат ЛА с большей точностью и непрерывностью. 2 з.п. ф-лы, 3 ил.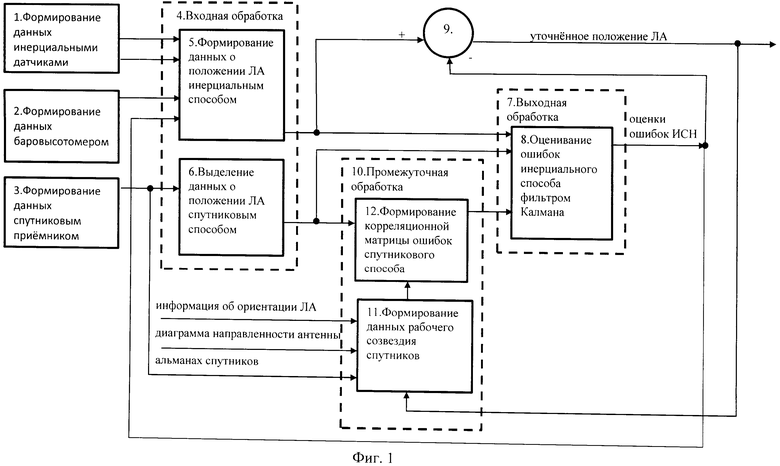
1. Способ инерциально-спутниковой навигации летательных аппаратов (ЛА), состоящий в том, что производится совместная обработка входных данных о положении ЛА, формируемых независимо инерциальными датчиками, вырабатывающими векторы угловой скорости и ускорения ЛА, барометрическим высотомером и спутниковым приемником глобальной навигационной спутниковой системы с известным альманахом спутников и определяемым в полете ЛА составом рабочего созвездия спутников, при этом во входной обработке формируют данные о положении ЛА инерциальным способом, вычисляя их на основе показаний инерциальных датчиков и баровысотомера, параллельно выделяют данные о положении ЛА, определяемые спутниковым способом в спутниковом приемнике, а в выходной обработке на основе упомянутых оценок инерциального и спутникового способов выполняют оценку ошибок инерциального способа с помощью расширенного фильтра Калмана, а далее выполняют коррекцию ошибок инерциального способа во входной обработке и определяют уточненное положение ЛА в виде разности оценок положения ЛА, определенных инерциальным способом, и упомянутых оценок ошибок инерциального способа, отличающийся тем, что между входной и выходной обработками производят промежуточную обработку, включающую формирование данных рабочего созвездия на основе уточненного положения ЛА и информации об ориентации ЛА, альманахе спутников, диаграмме направленности антенны спутникового приемника, а также формирование корреляционной матрицы ошибок измерений спутникового приемника на основе данных рабочего созвездия спутников, а затем в выходной обработке выполняют оценку ошибок инерциального способа с учетом ориентации ЛА.
2. Способ по п.1, отличающийся тем, что во входной обработке при формировании оценок положения ЛА инерциальным способом вычисляют элементы оператора преобразования из связанной системы координат ЛА в навигационную систему координат, используя измерение вектора угловой скорости, и корректируют упомянутые элементы оператора с помощью оценок ошибок инерциального способа на выходе фильтра Калмана, вычисляют вектор ускорения в навигационной системе координат, используя откорректированный оператор преобразования, затем вычисляют скорости и координаты ЛА, параллельно во входной обработке при формировании данных рабочего созвездия выделяют из оценок положения ЛА спутниковым способом измерения псевдодальностей и псевдоскоростей, а также отношения сигнал/шум, а в промежуточной обработке проводят выбор рабочего созвездия спутников, исключая близкие к горизонту спутники, на основе информации об альманахе спутников и уточненных оценок параметров ЛА, проводят формирование векторов направления на спутники, используя информацию об ориентации ЛА в виде откорректированного оператора преобразования, а затем определяют весовые коэффициенты спутников, сопоставляя направления на спутники и диаграмму направленности антенны спутникового приемника, а далее формируют корреляционную матрицу ошибок спутникового способа с учетом весовых коэффициентов и отношений сигнал/шум для спутников рабочего созвездия, причем при вычислении оценок ошибок инерциального способа с помощью фильтра Калмана используют упомянутую корреляционную матрицу ошибок спутникового способа.
3. Способ по п.1, отличающийся тем, что дополнительно проводят целевое управление поиском спутников рабочего созвездия путем формирования команд поиска спутников, при этом упомянутое формирование команд осуществляют после формирования данных рабочего созвездия спутников с учетом ориентации ЛА, а упомянутые команды поиска используют для управления режимом спутникового приемника через его управляющий вход.
| Авиационное вооружение и авионика | |||
| Энциклопедия XXI века | |||
| Оружие и технологии России | |||
| - М.: Оружие и технологии | |||
| Том X, 1999 | |||
| Способ приготовления искусственной массы из продуктов конденсации фенолов с альдегидами | 1920 |
|
SU360A1 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| Сновальная машина | 1935 |
|
SU44838A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| JP 8125915 A, 17.05.1996 | |||
| US 20080180655 A1, 31.07.2008 | |||

