Изобретение относится к технике связи и может использоваться для определения координат радиопередатчиков с использованием глобальных навигационных систем (ГНС).
Возможность определения координат радиопередатчиков предоставляет ряд преимуществ для владельца передатчика, связанных, как с обеспечением безопасности, так и с возможностью его ориентации на местности.
Известны способы самоопределения координат передатчика, основанные на использовании таких ГНС, как ГЛОНАСС и НАВСТАР [1-4], с последующей передачей информации о координатах по каналу связи.
Однако реализация таких способов определения координат передатчика не всегда возможна особенно в чрезвычайных ситуациях при выходе из строя навигационного оборудования, оборудования каналов связи или в случае иных техногенных катастроф, в частности авиационных.
Для подобных ситуаций был разработан ряд других способов определения координат передатчиков [5-7], на основе которых была создана международная спутниковая система спасения КОСПАС-САРСАТ, инициаторами создания которой явились Советский Союз, США, Канада и Франция [5]. Система спасения КОСПАС-САРСАТ основана на использовании сети космических аппаратов с полярными орбитами высотой 850 км над поверхностью Земли. С сентября 1982 г. по декабрь 2001 г. при использовании системы КОСПАС-САРСАТ было спасено 15700 человек в 4500 поисково-спасательных операциях (ПСО) по всему миру [8].
Одним из широко применяемых способов определения координат в системе спасения КОСПАС-САРСАТ является способ [7] - аналог предлагаемого способа, основанный на использовании доплеровского смещения частоты сигнала. Такое смещение частоты сигнала обусловлено перемещением позиции спутника относительно позиции радиопередатчика, сигнализирующего о возникновении чрезвычайной ситуации. Однако радиопередатчики связных и спасательных систем не всегда обладают высокой стабильностью, обеспечивающей высокое качество частотных измерений, присущих навигационным системам [2, 4]. Указанный факт, в ряде случаев, может привести к низкому качеству частотных измерений, а как следствие, к снижению точности определения координат. К другим недостаткам способа-аналога относятся возможное наличие неоднозначных решений системы навигационных уравнений для передатчиков, симметрично расположенных относительно траектории движения наблюдающей приемной позиции системы КОСПАС-САРСАТ [6, 7], и ограниченность района наблюдения.
Указанные недостатки, в ряде случаев, затрудняют реализацию поисково-спасательных операций. Так, например, в сентябре 1990 года пассажирский самолет Боинг 727 Перуанских авиалиний потерпел крушение в районе острова Ньюфаундленд [9]. Ряд самолетов и кораблей приняли участие в поисках, но в течение примерно недельных поисков не было обнаружено даже признаков наличия обломков крушения, из чего было сделано заключение об утрате надежды найти выживших в авиакатастрофе [10]. Только два месяца спустя, после бесплодных поисков с использованием авиации в течение 610 часов, официальные лица высказали смутное предположение о месте, где мог приводниться авиалайнер [11]. Сигналы от аварийного радиопередатчика непрерывно принимались приемной позицией системы КОСПАС-САРСАТ и локальным терминалом системы [9], однако избранные стратегия обработки и способ определения координат [7], не позволили определить координаты источника с требуемым качеством. Возможно это произошло вследствие совокупности низкого качества сигнала передатчика, сложной помеховой обстановки и отсутствия постоянного контроля сигнала, не позволившего применить более сложные алгоритмы обработки.
Наиболее близким к предлагаемому способу определения координат радиопередатчиков по совокупности используемых действий над сигналом является способ [12], основанный на использовании разностей времен прихода (РВП) сигнала (на пространственно разнесенных позициях, расположенных на земной поверхности) для определения координат (более точного, чем в аналогах), принятый за прототип.
Согласно этому способу:
1. Измеряют времена прихода сигнала на нескольких разнесенных приемных позициях, расположенных на земной поверхности, относительно спутниковых временных шкал различных позиций ГНС, соответствующих указанным разнесенным позициям.
2. Генерируют, соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на одной общей приемной позиции,
3. Измеряют разности временных шкал между различными позициями ГНС на указанной общей приемной позиции, вызванные различием опорных сигналов для различных позиций ГНС.
4. Передают на указанную общую приемную позицию измерения времен прихода сигнала.
5. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения РВП сигнала.
6. Компенсируют вклад погрешностей режима селективного доступа в погрешность измерения РВП сигнала.
7. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
8. Определяют координаты радиопередатчиков по нескольким РВП сигнала.
По существу способ, описанный выше [12], реализует разностно-дальномерный способ определения координат радиопередатчиков [13] с получением измерений РВП сигнала по измерениям времен прихода сигнала на разнесенных приемных позициях, расположенных на земной поверхности. При этом синхронизация измерений времен прихода сигнала обеспечивается использованием на каждой из указанных разнесенных позиций индивидуального навигационного РПУ как формирователя шкалы времени.
Подобное формирование шкал времени на разнесенных позициях хотя и является эффективным способом синхронизации временных шкал [2], но, как справедливо отмечено в [12], приводит к возникновению их рассогласования как в силу использования различных позиций ГНС различными навигационными РПУ (это обусловлено различием условий наблюдения, естественными и искусственными преградами, такими как лес, горы, здания и сооружения, многолучевостью распространения радиоволн и т.д.), так и в силу режима селективного доступа к сигналам ГНС, в частности в ГНС НАВСТАР [14]. Пятая и шестая операции в способе-прототипе позволяют существенно снизить влияние указанных факторов на качество определения координат, однако исключить полностью их влияние при используемом в прототипе формировании шкал времени и последующей их корректировке нельзя.
Определение координат радиопередатчика реализуется по результатам измерения времен прибытия, удовлетворяющих модели наблюдения
 ,
,
где  - измерение времени прибытия k-го сигнала на i-ю приемную позицию (ПП);
- измерение времени прибытия k-го сигнала на i-ю приемную позицию (ПП);  - неизвестный наблюдателю момент излучения радиопередатчиком k-го сигнала;
- неизвестный наблюдателю момент излучения радиопередатчиком k-го сигнала;  - неизвестная наблюдателю дальность от радиопередатчика до i-й ПП; c - скорость света;
- неизвестная наблюдателю дальность от радиопередатчика до i-й ПП; c - скорость света;  - погрешность измерения времени прибытия, включающая как флюктуационную составляющую, так и указанное выше возможное смещение временных шкал на ПП.
- погрешность измерения времени прибытия, включающая как флюктуационную составляющую, так и указанное выше возможное смещение временных шкал на ПП.
При переходе к разностным измерениям РВП  для, соответственно, i-й ПП и j-й ПП устраняется зависимость от неопределенного параметра
для, соответственно, i-й ПП и j-й ПП устраняется зависимость от неопределенного параметра 

что позволяет выделить из РВП разности дальностей  , традиционно используемые в качестве навигационных параметров [1, 2].
, традиционно используемые в качестве навигационных параметров [1, 2].
Совокупность разностей дальностей, полученных при одновременном приеме системой из (M+1) ПП в течение K моментов наблюдения, связана с искомыми координатами радиопередатчика системой из (M×K) уравнений

где rj(k) - вектор заданных координат xj, yj, zj положения j-й ПП  в k-й момент наблюдения; x(k) - вектор искомых координат x, y, z положения радиопередатчика в k-й момент наблюдения.
в k-й момент наблюдения; x(k) - вектор искомых координат x, y, z положения радиопередатчика в k-й момент наблюдения.
При выполнении соответствующих условий наблюдаемости [13, 15] решение системы (3) для измерений разностей дальности (РД), полученных из разностных измерений (2), задает оценку искомых координат положения радиопередатчика разностно-дальномерным методом (РДМ). Например, при однократном измерении времени прихода сигнала одновременно четырьмя ПП может быть определена оценка местоположения радиопередатчика в трехмерных координатах. Для неподвижных ПП и неподвижного объекта повторные измерения для k=1, 2,... не изменяют условий наблюдаемости (не снижают требований к количеству используемых ПП), но создают статистическую избыточность, повышающую потенциальную точность определения.
Даже в случае подвижных наземных ПП их перемещение за время наблюдения, как правило, достаточно мало (по сравнению с размером базы системы), что не обеспечивает существенного улучшения наблюдаемости по сравнению со статическим случаем.
При использовании информации о нахождении радиопередатчика на известной поверхности, например на земной поверхности, с известной моделью, размерность задачи уменьшается на одно неизвестное, что позволяет ослабить требования к указанным выше условиям наблюдения [16].
По сравнению с аналогами [5-7] способ-прототип обладает более высокой точностью определения координат радиопередатчиков, поскольку разностно-дальномерный способ имеет меньший коэффициент геометрического фактора снижения точности определения местоположения [13], к тому же в прототипе имеет место более высокое качество первичных измерений, обусловленное, в том числе, предпринятыми мерами по обеспечению временной синхронизации.
Однако указанные выше недостатки и локальность зоны наблюдения (малый радиус), определяемая расположением наземных приемных позиций, могут также привести к потере объектов при ПСО, как в приведенном выше примере. Указанная локальность зоны наблюдения ведет к необходимости взаимодействия между собой различных промежуточных инстанций до перехода к фазе спасения терпящих бедствие, а это неизбежно ведет к потере времени и снижению оперативности поисково-спасательной операции.
Техническим результатом изобретения является повышение точности определения координат и оперативности их доведения до потребителя за счет использования в качестве разнесенных приемных позиций спутниковых позиций ГНС и, за счет осуществления измерений времен прихода сигнала относительно первичных временных шкал ГНС с последующей передачей результатов измерений на пункты наблюдения и поиска.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием глобальных навигационных систем (ГНС), включающем измерение времени прихода сигнала относительно спутникового времени ГНС на нескольких разнесенных приемных позициях, генерацию, соответствующих спутниковым позициям ГНС временных шкал по опорным сигналам различных позиций ГНС на одной общей приемной позиции, измерение разности временных шкал между различными позициями ГНС на указанной общей приемной позиции, передачу на нее измерений времен прихода сигнала, корректировку временных шкал для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода (РВП) сигнала, измерение РВП сигнала посредством сравнения между собой измерений времен прихода сигнала, определение координат радиопередатчиков по нескольким РВП сигнала, согласно изобретению сигнал радиопередатчика одновременно принимают на нескольких спутниковых позициях ГНС, на указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика, времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал, результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения, сформированные сигналы кодируют, модулируют и передают на упомянутую выше общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС, на общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС, из декодированных сигналов выделяют результаты измерений времен прихода сигнала, из принятых, демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС, прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала, а координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Другим техническим результатом изобретения является передача результатов измерений совместно (в одном канале связи) с сигналом навигационного сообщения за счет использования резервных позиций навигационного сообщения.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению результаты измерений времен прихода сигнала формируют как сигнал сообщения, размещаемого на резервных позициях сигнала навигационного сообщения, сформированный таким образом сигнал кодируют, модулируют и передают в составе навигационного сигнала, а результаты измерений времен прихода сигнала выделяют из используемых при формировании резервных позиций сигнала навигационного сообщения.
Другим техническим результатом изобретения является повышение оперативности доставки результатов измерений времен прихода сигнала на пункты наблюдения и поиска за счет не зависимой от навигационного сигнала передачи результатов измерений.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению сформированный сигнал кодируют, модулируют и передают независимо от навигационного сигнала в режимах фазового, кодового, фазокодового или частотного уплотнения с навигационным сигналом.
Другим техническим результатом изобретения является повышение точности определения координат за счет повышения точности измерений времен прихода сигнала.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению положения на временных шкалах принятых и сгенерированных синхропрекодеров сигнала радиопередатчика сравнивают в результате нахождения аргумента максимума взаимной корреляционной функции указанных сигналов.
Другим техническим результатом изобретения является повышение точности определения координат за счет периодического повтора измерений.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению для радиопередатчиков периодически повторяющихся сигналов синхропрекодер сигнала радиопередатчика генерируют периодически с периодом, кратным периоду повторения сигнала радиопередатчика, и с такой же периодичностью измеряют времена прихода сигнала радиопередатчиков.
Другим техническим результатом изобретения является повышение точности определения координат и расширение площади поиска за счет дополнительного привлечения частотных измерений.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению посредством сравнения частот принятого и сгенерированного синхропрекодера сигнала радиопередатчика измеряют частоты приема сигнала радиопередатчика, формируемые сигналы сообщения дополняют результатами измерений частоты приема сигнала радиопередатчика, из декодированных сигналов дополнительно выделяют результаты измерений частот приема сигнала, измеряют разности частот приема (РЧП) сигнала посредством сравнения между собой полученных измерений частот приема сигнала, а координаты радиопередатчика определяют как по разностям времен прихода сигнала, так и по разностям частот приема сигнала.
Другим техническим результатом изобретения является повышение точности определения координат за счет периодического привлечения частотных измерений.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению для радиопередатчиков периодически повторяющихся сигналов, синхропрекодер сигнала радиопередатчика генерируют периодически с периодом, кратным периоду повторения сигнала радиопередатчика, и с такой же периодичностью измеряют времена прихода и частоты приема сигналов радиопередатчиков.
Другим техническим результатом изобретения является повышение точности определения координат за счет совместного частотно-временного оценивания.
Технический результат достигнут тем, что в способе определения координат радиопередатчиков с использованием ГНС, согласно изобретению положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика, а также их частоты сравнивают в результате нахождения аргументов максимума двумерной взаимной корреляционной функции указанных сигналов.
Другим техническим результатом изобретения является устройство для реализации способа, повышающее точность определения координат и оперативность их доведения до потребителя за счет использования в качестве разнесенных приемных позиций спутниковых позиций ГНС и за счет осуществления измерений времен прихода сигнала относительно первичных временных шкал ГНС с последующей передачей результатов измерений на пункты наблюдения и поиска.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, содержащем средства генерации меток времени, подключенные к входам средств измерения времени прихода сигнала, навигационный приемник (НП), расположенные на нескольких разнесенных приемных позициях средства передачи результатов измерений и средства приема сигнала радиопередатчика, соединенные с другими входами соответствующих средств измерения времени прихода сигнала относительно спутникового времени ГНС и расположенные на общей приемной позиции средства приема результатов измерений, устройство корректировки временных шкал и измерения РВП, выход которого подключен к устройству определения координат радиопередатчиков, согласно изобретению в качестве разнесенных приемных позиций используются навигационные космические аппараты (НКА) ГНС, а в качестве средств генерации меток времени - генераторы меток времени соответствующих НКА, при этом выходы указанных генераторов подключены к третьим входам соответствующих средств измерения времени прихода сигнала через соответствующие генераторы синхропрекодера сигнала радиопередатчика, выходы соответствующих средств измерения времени прихода сигнала связаны с входами соответствующих средств передачи результатов измерений через соответствующие каждому из них, последовательно включенные формирователь сигнала, устройство кодирования и модулятор, между соответствующими, каждой из используемых приемных позиций ГНС, средствами приема результатов измерений и входами устройства корректировки временных шкал и измерения РВП последовательно включены демодулятор, устройство декодирования и устройство выделения результатов измерений, между выходом НП и вторым входом устройства определения координат радиопередатчиков, расположенными на общей приемной позиции, последовательно подключены устройство выделения параметров движения НКА и устройство прогноза параметров движения НКА, другой вход устройства прогноза связан с устройством определения координат радиопередатчиков для получения информации о времени начала, продолжительности и шаге прогноза, при этом выход НП соединен также с дополнительным входом устройства корректировки временных шкал и измерения РВП.
Другим техническим результатом изобретения является устройство для реализации способа определения координат радиопередатчиков с использованием ГНС, повышающее точность определения координат за счет повышения точности измерений времен прихода сигнала.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, согласно изобретению в качестве средств измерения времени прихода сигнала используют устройства определения аргумента максимума взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика.
Другим техническим результатом изобретения является устройство для реализации способа, увеличивающее длительность возможного времени наблюдения и размеры региона наблюдения.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, согласно изобретению между средствами приема сигнала радиопередатчика и дополнительными входами соответствующих формирователей сигнала включены средства измерения частоты приема сигнала, другие входы которых связаны с соответствующими генераторами синхропрекодера сигнала радиопередатчика, при этом в устройстве корректировки временных шкал и измерения РВП выполняют также измерения РЧП.
Другим техническим результатом изобретения является устройство для реализации способа, повышающее точность определения координат за счет совместного частотно-временного оценивания.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, согласно изобретению, в качестве средств измерения времени прихода сигнала на НКА ГНС используют устройства определения аргумента максимума двумерной взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика, при этом второй выход указанного устройства связан с дополнительным входом формирователя сигнала для передачи аргумента максимума указанной функции по оси частот.
Другим техническим результатом изобретения является устройство для реализации способа, совмещающее результаты измерений с сигналом навигационного сообщения за счет использования резервных позиций навигационного сообщения, что исключает необходимость в дополнительном канале связи для передачи результатов измерений.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, содержащем средства генерации меток времени, подключенные к входам средств измерения времени прихода сигнала, навигационный приемник, расположенные на нескольких разнесенных приемных позициях средства передачи результатов измерений и средства приема сигнала радиопередатчика, соединенные с другими входами соответствующих средств измерения времени прихода сигнала относительно спутникового времени ГНС и расположенные на общей приемной позиции средства приема результатов измерений, устройство корректировки временных шкал и измерения РВП, соединенное с устройством определения координат радиопередатчиков, согласно изобретению в качестве разнесенных приемных позиций используются навигационные космические аппараты (НКА) ГНС, в качестве средств генерации меток времени - генераторы меток времени соответствующих НКА, выходы которых подключены к входам средств измерения времени прихода сигнала через соответствующие генераторы синхропрекодера, а в качестве средств передачи результатов измерений - передатчики навигационного сигнала соответствующих НКА, выходы соответствующих средств измерения времени прихода сигнала связаны с указанными передатчиками по дополнительному входу формирователей навигационного сигнала через последовательно соединенные устройство кодирования и модулятор навигационного сигнала с размещением результатов измерений в резервных полях навигационного сообщения, между выходом навигационного приемника и входом устройства определения координат радиопередатчиков, расположенными на общей приемной позиции, включено устройство корректировки временных шкал и измерения РВП, а между выходом навигационного приемника и вторым входом устройства определения координат радиопередатчиков последовательно подключены устройство выделения параметров движения НКА и устройство прогноза параметров движения НКА, другой вход которого связан с устройством определения координат радиопередатчиков для получения информации о времени начала, продолжительности и шаге прогноза.
Другим техническим результатом изобретения является устройство для реализации способа c совмещением результатов измерений с сигналом навигационного сообщения, повышающее точность определения координат за счет повышения точности измерений времен прихода сигнала.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, согласно изобретению в качестве средств измерения времени прихода сигнала используют устройства определения аргумента максимума взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика.
Другим техническим результатом изобретения является устройство для реализации способа c совмещением результатов измерений с сигналом навигационного сообщения, повышающее точность определения координат и увеличивающее длительность возможного времени наблюдения и размеры региона наблюдения.
Технический результат достигнут тем, что в устройстве, реализующем способ определения координат радиопередатчиков с использованием ГНС, согласно изобретению в качестве средств измерения времени прихода сигнала используют устройства определения аргумента максимума двумерной взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика, при этом второй выход указанного устройства связан с дополнительным входом формирователя сигнала для передачи аргумента максимума указанной функции по оси частот.
На фигуре 1 представлен принцип реализации предложенного способа определения координат радиопередатчиков с использованием ГНС.
На фигуре 2 представлена структурная схема устройства, в котором реализуется предложенный способ определения координат радиопередатчиков с использованием ГНС.
На фигуре 3 представлена структурная схема первого варианта устройства корректировки временных шкал и измерения РВП.
На фигуре 4 представлена структурная схема второго варианта устройства, в котором реализуется предложенный способ.
На фигуре 5 представлена структурная схема третьего варианта устройства, в котором реализуется предложенный способ.
На фигуре 6 представлена структурная схема четвертого варианта устройства, в котором реализуется предложенный способ.
На фигуре 7 представлена структурная схема пятого варианта устройства, в котором реализуется предложенный способ.
На фигуре 8 представлена структурная схема второго варианта устройства корректировки временных шкал и измерения РВП (используемого в пятом, шестом и седьмом вариантах устройства для реализации предложенного способа определения координат радиопередатчиков с использованием ГНС).
На фигуре 9 представлена структурная схема шестого варианта устройства, в котором реализуется предложенный способ.
На фигуре 10 представлена структурная схема седьмого варианта устройства, в котором реализуется предложенный способ.
Согласно предлагаемому способу определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал.
4. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
5. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
6. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
7. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала.
8. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
9. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
10. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
11. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
12. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
13. Прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала.
14. Координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Использование в качестве приемных позиций, на которых осуществляют измерение времен прихода сигнала, нескольких разнесенных спутниковых позиций ГНС позволяет практически полностью исключить нестационарное рассогласование временных шкал, присущее прототипу, поскольку при формировании временных шкал на каждой из указанных позиций используются опорные сигналы рубидиевых или цезиевых стандартов частоты и времени [1-3, 14].
Более того, использование в качестве приемных позиций баллистических группировок ГНС типа НАВСТАР и ГЛОНАСС для определения координат передатчиков посредством решения обратной навигационной задачи с использованием системы уравнений (3) позволяет в несколько раз повысить точность определения местоположения по сравнению с прототипом, эксплуатирующим наземные приемные позиции, за счет многократно большего расстояния между приемными позициями в предлагаемом способе (расстояние между НКА систем типа НАВСТАР, ГЛОНАСС и ГАЛИЛЕО превышает 20 тысяч километров [1, 14]) и существенно более лучшего геометрического фактора точности [17].
Генерация синхропрекодера сигнала радиопередатчика (под понятием синхропрекодера [24-26, 36] подразумевается совокупность участков сигнала с априорно известной и регулярно используемой при передаче структурой сообщения, используемой для осуществления функций синхронизации по несущей, тактовой и кадровой частотам и т.п.) на используемых спутниковых позициях ГНС позволяет произвести измерение времени прихода сигнала радиопередатчика посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика с использованием прецизионных временных шкал соответствующих спутниковых позиций ГНС, что также ведет к повышению точности определения координат передатчиков и позволяет передавать только измеренные параметры с исключением необходимости передачи самих сигналов, как это требуется при традиционной реализации разностно-дальномерного способа определения местоположения [13].
Измерение разности временных шкал между различными позициями ГНС на общей приемной позиции обусловлено возможностью совместного использования нескольких разнесенных спутниковых позиций различных ГНС, например таких как НАВСТАР и ГЛОНАСС, временные шкалы которых смещены между собой [1, 14].
Поскольку смещение временных шкал, определяемое спецификациями ГНС [1, 14], является стационарным, то последующая коррекция позволяет исключить погрешность смещения временных шкал.
Помимо повышения точности определения местоположения, предложенный способ определения координат радиопередатчиков с использованием ГНС при его использовании для систем спасения типа КОСПАС-САРСАТ предоставляет практически глобальное расширение зоны контроля с возможностью оперативного доведения информации о чрезвычайном происшествии до соответствующих служб с исключением ситуаций, подобных событиям в районе острова Ньюфаундленд [9-10], когда объект крушения не был оперативно обнаружен.
Согласно второму варианту предлагаемого способа, совмещающему передачу результатов измерений с сигналом навигационного сообщения за счет использования резервных позиций навигационного сообщения:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал
4. Результаты измерений времен прихода сигнала формируют как сигналы сообщения, размещаемого на резервных позициях сигнала навигационного сообщения.
5. Сформированные таким образом сигналы кодируют, модулируют и передают в составе навигационного сигнала на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
6. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
7. Результаты измерений времен прихода сигнала выделяют из используемых при формировании резервных позиций сигнала навигационного сообщения.
8. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
9. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
10. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
11. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
12. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
13. Прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала.
14. Координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Такой вариант способа определения координат радиопередатчиков с использованием ГНС позволяет исключить необходимость в дополнительном канале связи.
Однако низкая пропускная способность такого варианта способа может привести к повышению вероятности пропуска чрезвычайного происшествия в сезон штормов, в частности, в регионах, подобных району мыса Горн.
Согласно третьему варианту способа определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал
4. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
5. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС независимо от навигационного сигнала в режимах фазового, кодового, фазо-кодового или частотного уплотнения с навигационным сигналом.
6. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
7. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала.
8. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
9. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
10. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
11. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
12. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
13. Прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала.
14. Координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Третий вариант способа определения координат радиопередатчиков с использованием ГНС позволяет повысить оперативность доставки результатов измерений времен прихода сигнала на пункты наблюдения и поиска за счет независимой от навигационного сигнала передачи результатов измерений в режимах фазового, кодового, фазокодового или частотного уплотнения с навигационным сигналом. Повышение оперативности доставки в третьем варианте способа обеспечивается исключением зависимости пропускной способности канала связи от количества резервных полей в навигационном сигнале используемых ГНС. Данный вариант способа практически исключает пропуск чрезвычайного происшествия.
Согласно четвертому варианту способа определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал, при этом положения на временных шкалах принятых и сгенерированных синхропрекодеров сигнала радиопередатчика, сравнивают в результате нахождения аргумента максимума взаимной корреляционной функции указанных сигналов.
4. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
5. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
6. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
7. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала.
8. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
9. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
10. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
11. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
12. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
13. Прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала.
14. Координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Четвертый вариант способа определения координат радиопередатчиков с использованием ГНС позволяет повысить точность определения координат за счет повышения точности измерений времен прихода сигнала положения на временных шкалах принятых и сгенерированных синхропрекодеров сигнала радиопередатчика как результата нахождения аргумента максимума взаимной корреляционной функции указанных сигналов, поскольку такая оценка времен прихода сигнала является максимально правдоподобной оценкой, достигающей нижней границы Крамера-Рао [7, 18-19].
Способ и устройство для реализации таких кросскорреляционных измерений запатентован ФГУП ГКБ "Связь" [20].
Согласно пятому варианту способа определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, для радиопередатчиков периодически повторяющихся сигналов, синхропрекодер сигнала радиопередатчика генерируют периодически с периодом, кратным периоду повторения сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют периодически посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал с периодом кратным периоду повторения сигнала радиопередатчика.
4. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
5. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
6. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
7. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала.
8. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
9. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
10. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
11. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
12. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
13. Прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала.
14. Координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Пятый вариант способа определения координат радиопередатчиков с использованием ГНС позволяет повысить точность определения координат как за счет увеличения объема наблюдений, создающего статистическую избыточность в системе уравнений (3), так и за счет улучшения условий наблюдаемости вследствие изменения ориентации баз локации, вызванного перемещением приемных позиций НКА ГНС [1-3, 13, 19].
Согласно шестому варианту способа определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал
4. Посредством сравнения частот принятого и сгенерированного синхропрекодера сигнала радиопередатчика измеряют частоты приема сигнала радиопередатчика
5. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
6. Формируемые сигналы сообщения дополняют результатами измерений частоты приема сигнала радиопередатчика.
7. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
8. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
9. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала.
10. Из декодированных сигналов дополнительно выделяют результаты измерений частот приема сигнала.
11. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
12. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
13. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
14. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
15. Измеряют разности частот приема (РЧП) сигнала посредством сравнения между собой полученных измерений частот приема сигнала.
16. Из принятых, демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
17. Прогнозируют полученные параметры движения на моменты измерений времен прихода и частот приема сигнала.
18. Координаты радиопередатчика с использованием результатов прогноза движения используемых спутниковых позиций ГНС определяют как по разностям времен прихода сигнала, так и по разностям частот приема сигнала.
Шестой вариант способа определения координат радиопередатчиков с использованием ГНС позволяет повысить точность определения координат за счет одновременного использования поверхностей положения соответствующих измерениям разнородных физических величин (времени и частоты).
Расширение площади поиска в шестом варианте способа определения координат радиопередатчиков с использованием ГНС достигается за счет возможного сокращения используемых приемных позиций ГНС при дополнительном привлечении к определению координат частотных измерений.
В действительности, при одновременных измерениях на каждой приемной позиции НКА ГНС как времени прибытия (1) сигнала, так и частоты принятого сигнала, удовлетворяющей модели наблюдения

где  - измерение на i-й приемной позиции ГНС несущей частоты принятого k-го сигнала;
- измерение на i-й приемной позиции ГНС несущей частоты принятого k-го сигнала;  - несущая частота излученного k-го сигнала искомого радиопередатчика;
- несущая частота излученного k-го сигнала искомого радиопередатчика;  - неизвестная наблюдателю радиальная скорость между радиопередатчиком и i-й приемной позиции ГНС (всюду далее «·»
- неизвестная наблюдателю радиальная скорость между радиопередатчиком и i-й приемной позиции ГНС (всюду далее «·» над величиной означает дифференцирование по времени); ηi(k) - погрешность измерения частоты принятого сигнала.
над величиной означает дифференцирование по времени); ηi(k) - погрешность измерения частоты принятого сигнала.
Радиальная скорость, входящая в (4), связана с вектором координат радиопередатчика соотношением

где операция «·» - обозначает скалярное произведение векторов.
Если величина частоты априорно известна наблюдателю и достаточно стабильна, то измерения (4) могут быть преобразованы к виду (5) и уравнения вида (5) могут использоваться наряду с уравнениями (3) для формирования навигационной системы, объединяющей РД и радиально-скоростные уравнения. В других случаях, когда величина частоты недостаточно стабильна, целесообразен переход к разностным частотным измерениям, аналогичным (2), где

Следует отметить, что при переходе к разностным измерениям вида (6) по сравнению с непосредственным использованием частотных измерений (4) для каждого момента наблюдения получается на одно уравнение меньше, кроме того, увеличивается дисперсия (в равноточном случае - удваивается) единичных измерений. С другой стороны, при переходе от (4) к (6) существенно снижается чувствительность к погрешностям в задании , поэтому выбор между прямым или разностным использованием частотных измерений осуществляется в каждом конкретном случае в зависимости от баланса указанных факторов погрешностей.
Объединяя уравнения (6), задающие разность радиальных скоростей, с РД уравнениями (3), имеем для K моментного наблюдения М+1 позиционной системой 2×М×K независимых уравнений:

При этом шестой вариант предлагаемого способа определения координат позволяет, например, при наблюдении радиопередатчика уже двумя приемными позициями ГНС и указанном выше использовании априорной поверхности получить оценку местоположения неподвижного радиопередатчика даже по одномоментному наблюдению. Совместная область наблюдения для двух приемных позиций будет существенно больше по площади, чем для трех и более, поскольку геометрическое место точек сферического многоугольника, полученного в результате пересечения на земной поверхности двух разнесенных в пространстве зон наблюдения существенно больше по площади, чем геометрическое место точек сферического многоугольника, полученного в результате пересечения на земной поверхности трех и более разнесенных в пространстве зон наблюдения, что и приводит к возможности расширения площади поиска радиопередатчиков в данном варианте способа.
Согласно седьмому варианту способа определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, для радиопередатчиков периодически повторяющихся сигналов, синхропрекодер сигнала радиопередатчика генерируют периодически с периодом кратным периоду повторения сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют периодически посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал с периодом кратным периоду повторения сигнала радиопередатчика.
4. Посредством сравнения частот принятого и сгенерированного синхропрекодера сигнала радиопередатчика с периодом, кратным периоду повторения сигнала радиопередатчика, измеряют частоты приема сигнала радиопередатчика
5. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
6. Формируемые сигналы сообщения дополняют результатами измерений частоты приема сигнала радиопередатчика.
7. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
8. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
9. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала.
10. Из декодированных сигналов дополнительно выделяют результаты измерений частот приема сигнала.
11. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
12. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
13. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
14. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
15. Измеряют разности частот приема (РЧП) сигнала посредством сравнения между собой полученных измерений частот приема сигнала.
16. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
17. Прогнозируют полученные параметры движения на моменты измерений времен прихода и частот приема сигнала.
18. Координаты радиопередатчика с использованием результатов прогноза движения используемых спутниковых позиций ГНС определяют как по разностям времен прихода сигнала, так и по разностям частот приема сигнала.
Седьмой вариант способа определения координат радиопередатчиков с использованием ГНС, по сравнению с шестым вариантом, позволяет повысить точность определения координат как за счет увеличения объема наблюдений, создающего статистическую избыточность в системе уравнений (7), так и за счет улучшения условий наблюдаемости вследствие изменения ориентации баз локации, вызванного перемещением приемных позиций НКА ГНС [1-3, 13, 19].
Седьмой вариант способа определения координат радиопередатчиков позволяет также по совокупности моментов наблюдения оценивать траекторию подвижного объекта.
Согласно восьмому варианту способа определения координат радиопередатчиков с использованием ГНС:
1. Сигнал радиопередатчика одновременно принимают на нескольких разнесенных спутниковых позициях ГНС.
2. На указанных позициях с привязкой к временной шкале, соответствующей позиции приема сигнала, генерируют синхропрекодер сигнала радиопередатчика.
3. Времена прихода сигнала радиопередатчика измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал, при этом положения на временных шкалах принятых и сгенерированных синхропрекодеров сигнала радиопередатчика сравнивают в результате нахождения аргумента максимума двумерной взаимной корреляционной функции указанных сигналов с одновременной оценкой частот приема сигналов.
4. Результаты измерений времен прихода и частот приема сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения.
5. Сформированные сигналы кодируют, модулируют и передают на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС.
6. На общей приемной позиции принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС.
7. Из декодированных сигналов выделяют результаты измерений времен прихода и частот приема сигнала.
8. Генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС на указанной общей приемной позиции.
9. Измеряют разности временных шкал между различными позициями ГНС на общей приемной позиции.
10. Корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения разностей времен прихода.
11. Измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала.
12. Измеряют разности частот приема (РЧП) сигнала посредством сравнения между собой полученных измерений частот приема сигнала.
13. Из принятых демодулированных и декодированных навигационных сигналов на общей приемной позиции выделяют информацию о параметрах движения используемых спутниковых позиций ГНС.
14. Прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала.
15. Координаты радиопередатчика по разностям времен прихода сигнала определяют с использованием результатов прогноза движения используемых спутниковых позиций ГНС.
Восьмой вариант способа определения координат радиопередатчиков с использованием ГНС позволяет повысить точность определения координат за счет совместного оценивания измерений времен прихода и частот приема как результата нахождения аргумента максимума двумерной взаимной корреляционной функции указанных сигналов, поскольку такая совместная оценка времен прихода и частот приема сигнала позволяет исключить ряд составляющих погрешности измерений [7, 18-19].
В частности, в работе [20] представлена реализация устройства совместного оценивания РВП и РЧП на основе нахождения аргумента максимума двумерной взаимной корреляционной функции сигналов, а в работах [21-22] теоретически и экспериментально показана возможность повышения точности измерений при таком совместном оценивания РВП и РЧП.
Устройство, реализующее предложенный способ определения координат радиопередатчиков с использованием ГНС (фиг.2), содержит навигационный приемник (НП) 1 и расположенные на нескольких разнесенных приемных позициях (в качестве которых используются соответствующие им навигационные космические аппараты - НКА1, НКА2, ..., НКАN - глобальных навигационных систем) последовательно соединенные средства приема сигнала радиопередатчика 2, средства измерения времени прихода сигнала относительно спутникового времени ГНС 3, формирователь сигнала 4, устройство кодирования 5, модулятор 6 и средства передачи результатов измерений 7, при этом соответствующие каждому из НКА средства измерения времени прихода сигнала 3 другими входами подключены к расположенным на НКА средствам генерации меток времени 8 (в качестве которых используются генераторы меток времени соответствующих НКА), а третьи входы средства измерения времени прихода сигнала 3 связаны с генераторами меток времени 8 через соответствующие им генераторы синхропрекодера сигнала радиопередатчика 9. Расположенные на общей приемной позиции средства приема результатов измерений 10 соединены с соответствующими им входами устройства корректировки временных шкал и измерения РВП 11 через последовательно включенные демодуляторы 12, устройства декодирования 13 и устройства выделения результатов измерений 14. Выход устройства 11 подключен к устройству определения координат радиопередатчиков 15. Между выходом навигационного приемника 1 и вторым входом устройства 15, расположенными на общей приемной позиции, последовательно включены устройство выделения параметров движения НКА 16 и устройство прогноза параметров движения НКА 17. Другой вход устройства прогноза 17 связан с устройством определения координат радиопередатчиков 15. Выход НП 1 соединен также с дополнительным входом устройства 11.
Устройство выделения результатов измерений 14 обеспечивает выделение декодированных данных о временах прихода сигнала из потока сообщений, а также преобразование указанных данных к формату необходимому для устройства 11 и может быть реализовано на основе типового демультиплексора [23]. На основе одной из разновидностей демультиплексоров [23], выделяющих определенную конкретную информацию из потока уплотненных во времени данных, может быть реализовано и устройство выделения параметров движения НКА 16. Примеры реализации большинства используемых в предлагаемом устройстве средств приема, передачи, формирования, генерации, модуляции, демодуляции, кодирования, декодирования и выделения информации широко представлены в литературе [23-26]. Примеры реализации измерителей моментов времени и частоты приема широко представлены в работах [20-22, 27-32].
Устройство 11 может быть реализовано на основе (N-1) трехвходовых устройств вычитания 18 с двумя вычитающими входами (смотри фиг.3), все выходы устройства вычитания 18 объединяются мультиплексором данных 19. На первые входы устройств 18 при этом подаются данные от соответствующих им устройств выделения результатов измерений 14, на вторые входы, обеспечивающие вычитание, подаются данные, содержащие информацию о необходимости и номинале корректировки временных шкал через соответствующий демультиплексор 20, а на третьи входы, обеспечивающие вычитание, подаются данные от другого устройства выделения результатов измерений. Каждое из устройств 18 таким образом обеспечивает получение соответствующих РВП с корректировкой, при необходимости, временных шкал. Такая необходимость может возникнуть, например, если в качестве первой из разнесенных приемных позиций используется один из НКА системы ГЛОНАСС, а в качестве другой из разнесенных приемных позиций - один из НКА системы НАВСТАР, расхождение временных шкал которых может составлять величину порядка 12 секунд [1-4, 14]. Устройство прогноза параметров движения НКА 17 может быть реализовано на основе арифметико-логического устройства [23], исполняющего алгоритмы прогноза параметров движения НКА, которые представлены в [1, 3-4, 14, 35]. Устройство определения координат радиопередатчиков 15 может быть создано на основе другого арифметико-логического устройства [23], реализующего решение системы уравнений (3). Указанные устройства также могут быть реализованы на основе компьютера с соответствующим комплектом программного обеспечения.
В другом варианте описанного выше устройства (смотри Фигуру 4), реализующего предложенный способ определения координат радиопередатчиков с использованием ГНС, в качестве средств измерения времени прихода сигнала 3 используют устройства определения аргумента максимума взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика 21.
Первый вариант предлагаемого устройства (смотри Фигуру 2), реализующего способ определения координат радиопередатчиков с использованием ГНС, работает следующим образом.
Сигнал от искомого радиопередатчика, например от радиобуя АРБ-406 системы спасения КОСПАС-САРСАТ, принимается средствами приема сигнала радиопередатчика 2 навигационных космических аппаратов НКА1, НКА2, ..., НКАN глобальных навигационных систем типа ГЛОНАСС и НАВСТАР, с которых указанный радиопередатчик доступен для наблюдения. При этом на каждом из указанных НКА1, НКА2, ..., НКАN генераторами синхропрекодера сигнала радиопередатчика 9 генерируются синхропрекодеры сигнала радиопередатчика, соответствующие спецификации сигнала (например, для радиобуя АРБ-406 в соответствии со спецификацией [33]), с привязкой к первичной временной шкале каждого из соответствующих НКА, обеспечиваемой связью генераторов синхропрекодера 9 со средствами генерации меток времени 8. Времена прихода сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал соответствующими средствами измерения времени прихода сигнала относительно спутникового времени ГНС 3, для чего на одни из входов которых подается принятый сигнал радиопередатчика, а на третьи входы - сгенерированные синхропрекодеры сигнала радиопередатчика. Формирование шкалы времени в средствах измерения 3 при этом обеспечивается подачей на их вторые входы меток времени от соответствующих средств генерации меток времени 8. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения в соответствующих формирователях сигнала 4. Привязка сигналов формируемых сообщений к периоду навигационного сообщения обеспечивается связью указанных формирователей 4 с соответствующими средствами генерации меток времени 8. Сформированные сигналы последовательно кодируют, модулируют и передают (последовательно соединенными устройствами кодирования 5, модуляторами 6 и средствами передачи результатов измерений 7) на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС. В качестве такой приемной позиции может выступать как стационарный наземный объект, так и любое транспортное средство, оснащенное соответствующими техническими средствами. На указанной общей приемной позиции по соответствующим каждому из НКА1, НКА2, ..., НКАN N каналам приема принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС соответствующими N цепочками последовательно включенных средств приема результатов измерений 10, демодуляторов 12 и устройств декодирования 13. В зависимости от вида используемого уплотнения сигналов при реализации их передачи с НКА1, НКА2, ..., НКАN средства приема результатов измерений 10 обеспечивают фазовое, кодовое, фазокодовое или частотное разуплотнение принимаемых сигналов. Из декодированных сигналов выделяют результаты измерений времен прихода сигнала соответствующими устройствами выделения результатов измерений 14. С выходов устройств 14 результаты измерений времен прихода сигнала подаются на соответствующие входы устройства 11. Одновременно в навигационном приемнике 1, также расположенном на указанной общей приемной позиции, генерируют, соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС и измеряют разности временных шкал между различными позициями ГНС. Измеренные разности временных шкал между различными позициями ГНС с выхода НП 1 подаются на соответствующий вход устройства 11, в котором, при необходимости, корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения РВП так, как указано выше. Одновременно с необходимой коррекцией временных шкал в устройстве 11 измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала и с выхода устройства 11 подают на вход устройства определения координат радиопередатчиков 15. Из принятых демодулированных и декодированных НП 1 навигационных сигналов устройством выделения параметров движения НКА 16 из потока информации с выхода НП 1 через соответствующее соединение выделяют информацию о параметрах движения используемых спутниковых позиций ГНС. С выхода устройства 16 выделенная информация подается на вход устройства прогноза параметров движения НКА 17, в котором прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала с учетом поступающей на другой вход устройства прогноза 17 информации о времени начала, продолжительности и шаге прогноза из устройства определения координат радиопередатчиков 15. Прогноз параметров движения НКА выполняется в соответствии с алгоритмами прогноза параметров движения НКА, описанными, в частности, в работах [1, 3-4, 14, 35]. С выхода устройства прогноза 17 результаты прогноза передаются в устройство определения координат радиопередатчиков 15, в котором с использованием полученных измерений РВП и результатов прогноза параметров движения используемых НКА определяют координаты радиопередатчика, например, в результате решения системы уравнений (3).
Работа второго варианта предлагаемого устройства (фиг.4), реализующего способ определения координат радиопередатчиков с использованием ГНС, отличается от работы первого тем, что времена прихода сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют в результате нахождения аргумента максимума взаимной корреляционной функции указанных сигналов так, как это описано, например, в работах [20-22, 33]. Повышение за счет этого точности измерений времен прихода сигнала [20-22] приводит в итоге к увеличению точности определения координат радиопередатчиков.
В третьем варианте описанного выше устройства (фиг.5), реализующем предложенный способ определения координат радиопередатчиков с использованием ГНС (в отличие от первого варианта), между средствами приема сигнала радиопередатчика 2 и дополнительными входами соответствующих формирователей сигнала 4 дополнительно включены средства измерения частоты приема сигнала 22. Другие входы средств 22 связаны с соответствующими генераторами синхропрекодера сигнала радиопередатчика 9.
Третий вариант предлагаемого устройства (фиг.5), реализующего способ определения координат радиопередатчиков с использованием ГНС, работает следующим образом.
Сигнал от искомого радиопередатчика, например от радиобуя АРБ-406 системы спасения КОСПАС-САРСАТ, принимается средствами приема сигнала радиопередатчика 2 навигационных космических аппаратов НКА1, НКА2, ..., НКАN глобальных навигационных систем типа ГЛОНАСС и НАВСТАР, с которых указанный радиопередатчик доступен для наблюдения. При этом на каждом из указанных НКА1, НКА2, ..., НКАN генераторами синхропрекодера сигнала радиопередатчика 9 генерируются синхропрекодеры сигнала радиопередатчика на основе соответствующей спецификации сигнала, например [33], с привязкой к первичной временной шкале каждого из соответствующих НКА, обеспечиваемой связью генераторов синхропрекодера 9 со средствами генерации меток времени 8. Времена прихода сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал соответствующими средствами измерения времени прихода сигнала относительно спутникового времени ГНС 3, для чего на одни из входов которых подается принятый сигнал радиопередатчика, а на третьи входы - сгенерированные синхропрекодеры сигнала радиопередатчика. Формирование шкалы времени в средствах измерения 3 при этом обеспечивается подачей на их вторые входы меток времени от соответствующих средств генерации меток времени 8. Результаты измерений времен прихода сигнала формируют как сигналы сообщений, привязанных к периоду навигационного сообщения в соответствующих формирователях сигнала 4. Привязка сигналов формируемых сообщений к периоду навигационного сообщения обеспечивается связью указанных формирователей 4 с соответствующими средствами генерации меток времени 8. Посредством сравнения частот принятого и сгенерированного синхропрекодера сигнала радиопередатчика средствами измерения частоты приема сигнала 22 измеряют частоты приема сигнала радиопередатчика, при этом результаты измерений подают на дополнительный вход формирователей 4. Формируемые сигналы сообщения дополняют результатами измерений частот приема сигнала радиопередатчика (например, посредством мультиплексирования во времени). Сформированные сигналы последовательно кодируют, модулируют и передают (последовательно соединенными устройствами кодирования 5, модуляторами 6 и средствами передачи результатов измерений 7) на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС. В качестве такой приемной позиции может выступать как стационарный наземный объект, так и любое транспортное средство, оснащенное соответствующими техническими средствами. На указанной общей приемной позиции по соответствующим каждому из НКА1, НКА2, ..., НКАN N каналам приема принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций ГНС соответствующими N цепочками последовательно включенных средств приема результатов измерений 10, демодуляторов 12 и устройств декодирования 13. В зависимости от вида используемого уплотнения сигналов при реализации их передачи с НКА1, НКА2, ..., НКАN средства приема результатов измерений 10 обеспечивают прием и фазовое, кодовое, фазокодовое или частотное разуплотнение принимаемых сигналов. Из декодированных сигналов выделяют результаты измерений времен прихода и частоты приема сигнала соответствующими устройствами выделения результатов измерений 14. С выходов устройств 14 результаты измерений времен прихода и частот приема сигнала подаются на соответствующие входы устройства 11. Одновременно в навигационном приемнике 1, также расположенном на указанной общей приемной позиции, генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС и измеряют разности временных шкал между различными позициями ГНС. Измеренные разности временных шкал между различными позициями ГНС с выхода НП 1 подаются на соответствующий вход устройства 11, в котором, при необходимости, корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения РВП так, как указано выше. Одновременно с необходимой коррекцией временных шкал в устройстве 11 измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала и с выхода устройства 11 подают на вход устройства определения координат радиопередатчиков 15. РЧП сигнала при временном мультиплексировании результатов измерения времени и частоты измеряют в том же устройстве 11 посредством сравнения между собой измерений частот приема сигнала выделенных устройством 14 на другом временном отрезке. Из принятых демодулированных и декодированных НП 1 навигационных сигналов устройством выделения параметров движения НКА 16 из потока информации с выхода НП 1 через соответствующее соединение выделяют информацию о параметрах движения используемых спутниковых позиций ГНС. С выхода устройства 16 выделенная информация подается на вход устройства прогноза параметров движения НКА 17, в котором прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала с учетом поступающей на другой вход устройства прогноза 17 информации о времени начала, продолжительности и шаге прогноза из устройства определения координат радиопередатчиков 15. Прогноз параметров движения НКА выполняется в соответствии с алгоритмами прогноза параметров движения НКА, описанными, в частности, в работах [1, 3-4, 14, 35]. С выхода устройства прогноза 17 результаты прогноза передаются в устройство определения координат радиопередатчиков 15, в котором с использованием полученных измерений РВП, РЧП и результатов прогноза параметров движения используемых спутниковых позиций ГНС определяют координаты радиопередатчика, например, посредством решения системы уравнений (7).
В четвертом варианте описанного выше устройства (фиг.6), реализующем предложенный способ определения координат радиопередатчиков с использованием ГНС (в отличие от первого варианта), в качестве средств измерения времени прихода сигнала 3 используют устройства определения аргумента максимума двумерной взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика 23, а аргумент максимума указанной функции по оси частот через второй выход указанного устройства 23 передают на дополнительный вход формирователя сигнала 4.
Работа четвертого варианта предлагаемого устройства (фиг.6), реализующего способ определения координат радиопередатчиков с использованием ГНС, отличается от работы третьего тем, что времена прихода и частоты приема сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют в результате нахождения аргумента максимума двумерной взаимной корреляционной функции указанных сигналов устройством 23 так, как это описано, например, в работах [20-22], при этом аргумент максимума указанной функции по оси времени как результат измерения времени прихода сигнала передают с выхода устройства 23 на вход формирователя сигнала 4, а аргумент максимума указанной функции по оси частот как результат измерения частоты приема сигнала через второй выход указанного устройства 23 передают на дополнительный вход формирователя сигнала 4. Повышение точности измерений времен прихода сигнала [20-22] за счет такой реализации процесса измерений приводит в итоге к увеличению точности определения координат радиопередатчиков.
Пятый вариант устройства, реализующего предложенный способ определения координат радиопередатчиков с использованием ГНС (фиг.7), содержит расположенные на нескольких разнесенных приемных позициях (в качестве которых используются соответствующие им навигационные космические аппараты - НКА1, НКА2, ..., НКАN - глобальных навигационных систем) последовательно соединенные средства приема сигнала радиопередатчика 2, средства измерения времени прихода сигнала относительно спутникового времени ГНС 3, формирователь навигационного сигнала 24, устройство кодирования навигационного сигнала 25, модулятор навигационного сигнала 26 и средства передачи навигационного сигнала 27, при этом соответствующие каждому из НКА средства измерения времени прихода сигнала 3 другими входами подключены к расположенным на НКА средствам генерации меток времени 8 (в качестве которых используются генераторы меток времени соответствующих НКА), а третьи входы средства измерения времени прихода сигнала 3 связаны с генераторами меток времени 8 через соответствующие им генераторы синхропрекодера сигнала радиопередатчика 9. Расположенный на общей приемной позиции НП 1 подключен к устройству определения координат радиопередатчиков 15 через устройство 11. Между выходом НП 1 и вторым входом устройства 15, расположенными на общей приемной позиции, последовательно включены устройство выделения параметров движения НКА 16 и устройство прогноза параметров движения НКА 17. Другой вход устройство прогноза 17 связан с устройством определения координат 15.
Устройство 11 в пятом варианте предлагаемого устройства реализуется, как показано на фиг.8, в виде последовательно соединенных демультиплексора 20, устройства вычитания 18 и мультиплексора данных 19.
Пятый вариант предлагаемого устройства (фиг.7), реализующего способ определения координат радиопередатчиков с использованием ГНС, работает следующим образом.
Сигнал от искомого радиопередатчика, например от радиобуя АРБ-406 системы спасения КОСПАС-САРСАТ, в смеси с шумом принимается средствами приема сигнала радиопередатчика 2 навигационных космических аппаратов НКА1, НКА2, ..., НКАN глобальных навигационных систем типа ГЛОНАСС и НАВСТАР, с которых указанный радиопередатчик доступен для наблюдения. При этом на каждом из указанных НКА1, НКА2, ..., НКАN генераторами синхропрекодера сигнала радиопередатчика 9 генерируются синхропрекодеры сигнала радиопередатчика на основе соответствующей спецификации сигнала, например [33], с привязкой к первичной временной шкале каждого из соответствующих НКА, обеспечиваемой связью генераторов синхропрекодера 9 со средствами генерации меток времени 8. Времена прихода сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют посредством сравнения положения принятого и сгенерированного синхропрекодера сигнала радиопередатчика на каждой из соответствующих временных шкал соответствующими средствами измерения времени прихода сигнала относительно спутникового времени ГНС 3, для чего на одни из входов которых подается принятый сигнал радиопередатчика, а на третьи входы - сгенерированные синхропрекодеры сигнала радиопередатчика. Формирование шкалы времени в средствах измерения 3 при этом обеспечивается подачей на их вторые входы меток времени от соответствующих средств генерации меток времени 8. Результаты измерений времен прихода сигнала формируют как сигналы сообщения, размещаемого на резервных позициях сигнала навигационного сообщения, в соответствующих формирователях навигационного сигнала 24. Сформированные сигналы последовательно кодируют, модулируют и передают (последовательно соединенными устройствами кодирования навигационного сигнала 25, модуляторами навигационного сигнала 26 и средствами передачи навигационного сигнала 27) на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС. В качестве такой приемной позиции может выступать как стационарный наземный объект, так и любое транспортное средство, оснащенное соответствующими техническими средствами. На указанной общей приемной позиции по соответствующим каждому из НКА1, НКА2, ..., НКАN N каналам приема навигационного приемника 1 принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций. Одновременно в НП 1 генерируют, соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС и измеряют разности временных шкал между различными позициями ГНС. Измеренные разности временных шкал между различными позициями ГНС с выхода НП 1 подаются в потоке навигационного сообщения на вход устройства 11, в котором, при необходимости, корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения РВП так, как указано выше. Демультиплексором 20, входящим в состав устройства 11, из декодированного потока навигационного сообщения выделяют также и результаты измерений времен прихода сигнала. С выходов устройств 14 результаты измерений времен прихода сигнала подаются на соответствующие входы устройства 11. Одновременно с необходимой коррекцией временных шкал в устройстве 11 измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала и с выхода устройства 11 подают на вход устройства определения координат 15. Из принятых, демодулированных и декодированных НП 1 навигационных сигналов устройством выделения параметров движения НКА 16 из потока навигационного сообщения с выхода НП 1 через соответствующее соединение выделяют информацию о параметрах движения используемых спутниковых позиций ГНС. С выхода устройства 16 выделенная информация подается на вход устройства прогноза 17, в котором прогнозируют полученные параметры движения НКА на моменты измерений времен прихода сигнала с учетом поступающей на другой вход устройства прогноза 17 информации о времени начала, продолжительности и шаге прогноза из устройства определения координат 15. Прогноз параметров движения НКА выполняется в соответствии с алгоритмами прогноза параметров движения НКА, описанными, в частности, в работах [1, 3-4, 14, 35]. С выхода устройства прогноза 17 результаты прогноза передаются в устройство определения координат 15, в котором с использованием полученных измерений РВП и результатов прогноза параметров движения используемых НКА определяют координаты радиопередатчика, например, посредством решения системы уравнений (3).
Шестой вариант устройства, реализующего предложенный способ определения координат радиопередатчиков с использованием ГНС (фиг.9), содержит расположенные на нескольких разнесенных приемных позициях (в качестве которых используются соответствующие им навигационные космические аппараты - НКА1, НКА2, ..., НКАN - глобальных навигационных систем) последовательно соединенные средства приема сигнала радиопередатчика 2, средства измерения времени прихода сигнала относительно спутникового времени ГНС 3, в качестве которых используют устройства определения аргумента максимума взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика 21, формирователь навигационного сигнала 24, устройство кодирования навигационного сигнала 25, модулятор навигационного сигнала 26 и средства передачи навигационного сигнала 27, при этом соответствующие каждому из НКА средства измерения времени прихода сигнала 3 другими входами подключены к расположенным на НКА средствам генерации меток времени 8 (в качестве которых используются генераторы меток времени соответствующих НКА), а третьи входы средства измерения времени прихода сигнала 3 связаны с генераторами меток времени 8 через соответствующие им генераторы синхропрекодера сигнала радиопередатчика 9. Расположенный на общей приемной позиции навигационный приемник (НП) 1 подключен к устройству определения координат 15 через устройство 11. Между выходом НП 1 и вторым входом устройства 15, расположенными на общей приемной позиции, последовательно включены устройство выделения параметров движения НКА 16 и устройство прогноза параметров движения НКА 17. Другой вход устройство прогноза 17 связан с устройством определения координат радиопередатчиков 15.
Шестой вариант предлагаемого устройства (фиг.9), реализующего способ определения координат радиопередатчиков с использованием ГНС, работает следующим образом.
Сигнал от искомого радиопередатчика, например от радиобуя АРБ-406 системы спасения КОСПАС-САРСАТ, принимается средствами приема сигнала радиопередатчика 2 навигационных космических аппаратов НКА1, НКА2, ..., НКАN глобальных навигационных систем типа ГЛОНАСС и НАВСТАР, с которых указанный радиопередатчик доступен для наблюдения. При этом на каждом из указанных НКА1, НКА2, ..., НКАN генераторами синхропрекодера сигнала радиопередатчика 9 генерируются синхропрекодеры сигнала радиопередатчика на основе соответствующей спецификации сигнала, например [33], с привязкой к первичной временной шкале каждого из соответствующих НКА, обеспечиваемой связью генераторов синхропрекодера 9 со средствами генерации меток времени 8. Времена прихода сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют в результате нахождения аргумента максимума взаимной корреляционной функции указанных сигналов так, как это описано, например, в работах [20-22, 33], для чего на одни из входов устройств 21 подается принятый сигнал радиопередатчика, а на третьи входы - сгенерированные синхропрекодеры сигнала радиопередатчика. Повышение за счет использования таких измерителей, точности измерений времен прихода сигнала [20-22] приводит в итоге к увеличению точности определения координат радиопередатчиков. Формирование шкалы времени в устройствах 21 при этом обеспечивается подачей на их вторые входы меток времени от соответствующих средств генерации меток времени 8. Результаты измерений времен прихода сигнала формируют как сигналы сообщения, размещаемого на резервных позициях сигнала навигационного сообщения, в соответствующих формирователях навигационного сигнала 24. Сформированные сигналы последовательно кодируют, модулируют и передают (последовательно соединенными устройствами кодирования навигационного сигнала 25, модуляторами навигационного сигнала 26 и средствами передачи навигационного сигнала 27) на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС. В качестве такой приемной позиции может выступать как стационарный наземный объект, так и любое транспортное средство, оснащенное соответствующими техническими средствами. На указанной общей приемной позиции по, соответствующим каждому из НКА1, НКА2, ..., НКАN N каналам приема навигационного приемника 1 принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций. Одновременно в НП 1 генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС и измеряют разности временных шкал между различными позициями ГНС. Измеренные разности временных шкал между различными позициями ГНС с выхода НП 1 подаются в потоке навигационного сообщения на вход устройства 11, в котором, при необходимости, корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения РВП так, как указано выше. Демультиплексором 20, входящим в состав устройства 11, из декодированного потока навигационного сообщения выделяют также и результаты измерений времен прихода сигнала. С выходов устройств 14 результаты измерений времен прихода сигнала подаются на соответствующие входы устройства 11. Одновременно с необходимой коррекцией временных шкал в устройстве 11 измеряют РВП сигнала посредством сравнения между собой измерений времен прихода сигнала и с выхода устройства 11 подают на вход устройства определения координат 15. Из принятых демодулированных и декодированных НП 1 навигационных сигналов устройством выделения параметров движения НКА 16 из потока навигационного сообщения с выхода НП 1 через соответствующее соединение выделяют информацию о параметрах движения используемых НКА. С выхода устройства 16 выделенная информация подается на вход устройства прогноза параметров движения НКА 17, в котором прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала с учетом поступающей на другой вход устройства прогноза 17 информации из устройства определения координат 15 о времени начала, продолжительности и шаге прогноза. Прогноз параметров движения НКА выполняется в соответствии с алгоритмами прогноза параметров движения НКА, описанными, в частности, в работах [1, 3-4, 14, 35]. С выхода устройства прогноза 17 результаты прогноза передаются в устройство определения координат 15, в котором с использованием полученных измерений РВП и результатов прогноза параметров движения используемых НКА определяют координаты радиопередатчика, например, посредством решения системы уравнений (3).
Седьмой вариант устройства, реализующего предложенный способ определения координат радиопередатчиков с использованием ГНС (фиг.10), содержит расположенные на нескольких разнесенных приемных позициях (в качестве которых используются соответствующие им навигационные космические аппараты - НКА1, НКА2, ..., НКАN - глобальных навигационных систем) последовательно соединенные средства приема сигнала радиопередатчика 2, средства измерения времени прихода сигнала относительно спутникового времени ГНС 3 (в качестве которых используют устройства определения аргумента максимума двумерной взаимной корреляционной функции принятых и сгенерированных синхропрекодеров сигнала радиопередатчика 23, при этом аргумент максимума указанной функции по оси частот через вторые выходы указанных устройств передают на другие дополнительные входы соответствующих формирователей сигнала), формирователь навигационного сигнала 24, устройство кодирования навигационного сигнала 25, модулятор навигационного сигнала 26 и средства передачи навигационного сигнала 27, при этом соответствующие каждому из НКА средства измерения времени прихода сигнала 3 другими входами подключены к расположенным на НКА средствам генерации меток времени 8 (в качестве которых используются генераторы меток времени соответствующих НКА), а третьи входы средства измерения времени прихода сигнала 3 связаны с генераторами меток времени 8 через соответствующие им генераторы синхропрекодера сигнала радиопередатчика 9. Расположенный на общей приемной позиции навигационный приемник (НП) 1 подключен к устройству определения координат 15 через устройство 11. Между выходом НП 1 и вторым входом устройства 15, расположенными на общей приемной позиции, последовательно включены устройство выделения параметров движения НКА 16 и устройство прогноза параметров движения НКА 17. Другой вход устройства прогноза 17 связан с устройством определения координат 15.
Седьмой вариант предлагаемого устройства (фиг.10), реализующего способ определения координат радиопередатчиков с использованием ГНС, работает следующим образом.
Сигнал от искомого радиопередатчика, например от радиобуя АРБ-406 системы спасения КОСПАС-САРСАТ, принимается средствами приема сигнала радиопередатчика 2 навигационных космических аппаратов НКА1, НКА2, ..., НКАN глобальных навигационных систем типа ГЛОНАСС и НАВСТАР, с которых указанный радиопередатчик доступен для наблюдения. При этом на каждом из указанных НКА1, НКА2, ..., НКАN генераторами синхропрекодера сигнала радиопередатчика 9 генерируются синхропрекодеры сигнала радиопередатчика на основе соответствующей спецификации сигнала, например [33], с привязкой к первичной временной шкале каждого из соответствующих НКА, обеспечиваемой связью генераторов синхропрекодера 9 со средствами генерации меток времени 8. Времена прихода сигнала радиопередатчика на каждом из указанных НКА1, НКА2, ..., НКАN измеряют в результате нахождения аргумента максимума двумерной взаимной корреляционной функции указанных сигналов так, как это описано, например, в работах [20-22, 33], для чего на одни из входов устройств 23 подается принятый сигнал радиопередатчика, а на третьи входы - сгенерированные синхропрекодеры сигнала радиопередатчика, при этом аргумент максимума указанной функции по оси частот как результат измерения частоты приема сигнала через вторые выходы указанных устройств передают на другие дополнительные входы соответствующих формирователей сигнала. Повышение за счет использования таких измерителей точности измерений времен прихода сигнала [20-22] приводит в итоге к увеличению точности определения координат радиопередатчиков. Формирование шкалы времени в устройствах 21 при этом обеспечивается подачей на их вторые входы меток времени от соответствующих средств генерации меток времени 8. Результаты измерений времен прихода и частот приема сигнала формируют как сигналы сообщения, размещаемые с временным уплотнением на резервных позициях сигнала навигационного сообщения, в соответствующих формирователях навигационного сигнала 24. Сформированные сигналы последовательно кодируют, модулируют и передают (последовательно соединенными устройствами кодирования навигационного сигнала 25, модуляторами навигационного сигнала 26 и средствами передачи навигационного сигнала 27) на общую приемную позицию, с которой доступны для наблюдения и приема используемые спутниковые позиции ГНС. В качестве такой приемной позиции может выступать как стационарный наземный объект, так и любое транспортное средство, оснащенное соответствующими техническими средствами. На указанной общей приемной позиции по соответствующим каждому из НКА1, НКА2, ..., НКАN N каналам приема навигационного приемника 1 принимают, демодулируют и декодируют переданные сигналы от используемых спутниковых позиций. Одновременно в НП 1 генерируют соответствующие спутниковым позициям ГНС временные шкалы по опорным сигналам различных позиций ГНС и измеряют разности временных шкал между различными позициями ГНС. Измеренные разности временных шкал между различными позициями ГНС с выхода НП 1 подаются в потоке навигационного сообщения на вход устройства 11, в котором, при необходимости, корректируют временные шкалы для снижения вклада разностей временных шкал в погрешность измерения РВП так, как указано выше. Демультиплексором 20, входящим в состав устройства 11, из декодированного потока навигационного сообщения последовательно выделяют и уплотненные во времени результаты измерений времен прихода и частот приема сигнала искомого радиопередатчика на каждом НКА, наблюдаемом с общей приемной позиции. С выходов устройств 14 результаты измерений времен прихода и частот приема сигнала подаются на соответствующие входы устройства 11. Одновременно с необходимой коррекцией временных шкал в устройстве 11 измеряют РВП и РЧП сигнала посредством сравнения между собой измерений соответствующих времен прихода и частот приема сигнала в устройстве вычитания 18. С выхода устройства 11 РВП и РЧП сигнала, уплотненные во времени мультиплексором данных 19, передают на вход устройства определения координат 15. Из принятых демодулированных и декодированных НП 1 навигационных сигналов устройством выделения параметров движения НКА 16 из потока навигационного сообщения с выхода НП 1 через соответствующее соединение выделяют информацию о параметрах движения используемых НКА. С выхода устройства 16 выделенная информация подается на вход устройства прогноза параметров движения НКА 17, в котором прогнозируют полученные параметры движения на моменты измерений времен прихода сигнала с учетом поступающей на другой вход устройства прогноза 17 информации о времени начала, продолжительности и шаге прогноза из устройства определения координат радиопередатчиков 15. Прогноз параметров движения НКА выполняется в соответствии с алгоритмами прогноза параметров движения НКА, описанными, в частности, в работах [1, 3-4, 14, 35]. С выхода устройства прогноза 17 результаты прогноза передаются в устройство определения координат 15, в котором с использованием полученных измерений РВП и РЧП сигнала и результатов прогноза параметров движения используемых НКА определяют координаты радиопередатчика, например, посредством решения системы уравнений (7).
При оснащении НКА измерителями времени прихода сигнала, например от радиобуев АРБ-406, и другими техническими средствами, согласно изобретению, будет обеспечена передача результатов измерения любому потребителю, оснащенному описанными выше средствами приема и обработки измерений и навигационной информации.
Такой потребитель сможет оперативно и с высокой точностью определить координаты терпящих бедствие и сразу же попытаться прийти к ним на помощь.
В частности, в результате оснащения такими средствами морских судов можно существенно повысить безопасность мореплавания, поскольку каждое такое морское судно сможет прийти на помощь терпящим бедствие в радиусе более двух тысяч миль без потери времени на взаимодействие с промежуточными инстанциями.
Источники информации
1. Глобальная навигационная спутниковая система ГЛОНАСС, Интерфейсный контрольный документ, редакция 5.0, М., КНИЦ МО РФ, 2002 г.
2. Одуан К., Гино Б., Измерение времени. Основы GPS, М., Техносфера, 2002
3. Глобальная навигационная спутниковая система ГЛОНАСС, под ред. В.Н.Харисова, издание 2-е, исправленное, М., ИРПЖР, 1999, - 560 с., ил.
4. Tsui J,B.Y., Fundamentals of Global Positioning System Receivers: A Software Approach, John Wiley & Sons, Inc., 2000, - 255 с., ил. (аналоги).
5. Werstiuk, H. (1983) COSPAS-SARSAT: A system overview, Proceedings of the Intern. Electrical and Electronics Conf., Toronto, Sept, 1983, p.169-171.
6. Aksnes, K., etc., E. (1988) A precise multipass method for satellite Doppler positioning. Celestial Mechanics, 44, 4, p.317-338 (аналог).
7. El-Hennawey M.S. Carter C.R. Total Information Processor for 121.5/243 MHz SARSAT Signal, IEEE Trans. on AES v.29, July 1993 p.866-877 (аналоги).
8. Сведения о системе Коспас-Сарсат, Информационный бюллетень системы Коспас-Сарсат №16 (Август 2003).
9. Canadian Press (1990) Signals snarl search for downed jet. The Hamilton Spectator (Wed., Sept. 12, 1990), Al and A4.
10. Staff (1990) Plane search ends. The Hamilton Spectator (20.09.90) A4.
11. Canadian Press (1990) Pilot error blamed in ditching of plane. The Hamilton Spectator (Fri., Nov. 2, 1990).
12. US Patent No.6266012, Kangas A., Use of global positioning system in locating a radio transmitter, G01S 01/24, 1998 (Способ и устройство-прототип).
13. Torrieri Don J. Statistical theory of passive location systems. // IEEE Trans., vol. AES-20, No. 2, March 1984, pp. 183-198.
14. Global Positioning System Standard Positioning Service Performance Standard, October 2001, US DoD, Washington.
15. Ho K.C., Chan Y.Y., Solution and performance analysis of geolocation by TDOA. IEEE Trans. on AES, vol. 29, no 4 (Oct.1993), pp.1311-1322.
16. Ho K.C., Chan Y.Y., Geolocation of a known altitude object from TDOA and FDOA measurements. IEEE Trans. on AES, vol.33, no 3 (1997), pp.770-783.
17. Yarlagadda R., Ali I., Al-Dhahir N., and Hershey J., GPS GDOP Metric, IEE Proceedings on Radar, Sonar, and Navigation, pp.259-264, October 2000.
18. Moura Jose M.F., etc., Passive Systems Theory with Narrow-band and linear Constrraints: Part 1 - Spatial Diversity, IEEE Journal on Ocean Engineering, vol.OE-3, pp.5-13, No. 1 Jan. 1978.
19. Бендат Дж., Пирсол А., Прикладной анализ случайных данных, М., Мир, 1989.
20. Подчиненко Н.Е., Скрипкин А.А., Щербачев В.А. Патент на изобретение РФ №2256192, Способ измерения разностей времени прихода и частоты приема сигналов и устройство для его реализации, М., ФИПС, 2005 г.
21. Подчиненко Н.Е., Скрипкин А.А., Турунтаев О.В., Щербачев В.А. Метод совместного оценивания разностей времени прихода и частоты приема сигналов, Высокие информационные технологии в науке и производстве, Часть 1, Сборник материалов региональной научно-практической конференции, с.56-58, Издательство Ростовского университета, - 118 с., 2005 г.
22. Подчиненко Н.Е., Скрипкин А.А., Щербачев В.А. Снижение методической погрешности при цифровом корреляционном измерении разностных задержек и частотных сдвигов, // Радиоконтроль, 2005, Выпуск 8, с.64-73.
23. Точи Р. Дж., и др., Цифровые системы, М., ИД Вильямс, 2004, 1024 с.
24. Скляр Б., Цифровая связь: Теоретические основы и практическое применение, - 2-е издание, М., ИД Вильямс, 2003, 1104 с.
25. Спилкер Дж. Цифровая спутниковая связь М., Связь, 1979, 592 с.
26. Feher K. Digital communications: Satellite/Earth stations Engineering New-York, Prentice-Hall, 1983.
27. Ратхор Т.С., Цифровые измерения. Методы и схемотехника, М., Техносфера, 2004
28. Подчиненко Н.Е., Скрипкин А.А., Щербачев В.А., Патент на изобретение РФ №2183839, Способ измерения частоты синусоидальных сигналов и устройство для его реализации, М., ФИПС, 2002 г.
29. Боташев Б.М., Скрипкин А.А., Патент на изобретение РФ №2233452, Способ извлечения информации о допплеровском сдвиге частоты несущей сигнала и устройство для его осуществления, М., ФИПС, 2004 г.
30. Подчиненко Н.Е., Скрипкин А.А., Щербачев В.А., Патент РФ №2234810, Способ извлечения информации о допплеровском сдвиге частоты несущей сигнала и устройство для его реализации, М., ФИПС,, 2004 г.
31. Tretter S. A., Estimating the Frequency of a Noisy Sinusoid by Linear Regression, IEEE Trans. on Inform. Theory, v.IT-31, No.6, pp.832-835, Nov. 1985.
32. S.M.Kay, A fast and accurate single frequency estimator, IEEE Trans. on Acoustics, Speech and Signal Processing, v.37, no. 12, pp.1987-1990, 1989.
33. Jacovitti G. and Scarano G., Discrete time techniques for time delay estimation, IEEE Trans. Signal Processing, vol.41, pp.525-533, Feb. 1993.
34. Specification for COSPAS-SARSAT 406 MHz distress beacons C/S T.001 Issue 3 - Revision 4 October 2002, COSPAS-SARSAT.
35. Pratap Misra, Per Enge, Global Positioning System Signals, Measurements and Performance, Lincoln, Massachusetts, Ganga-Jamuna Press, 2004, 390 p.
36. E. Serpedin, A. etc., Blind Channel and Carrier Frequency Offset/Doppler Estimation Using Periodic Modulation Precoders, IEEE Trans. on Signal Processing, vol.48, no. 8, August 2000.
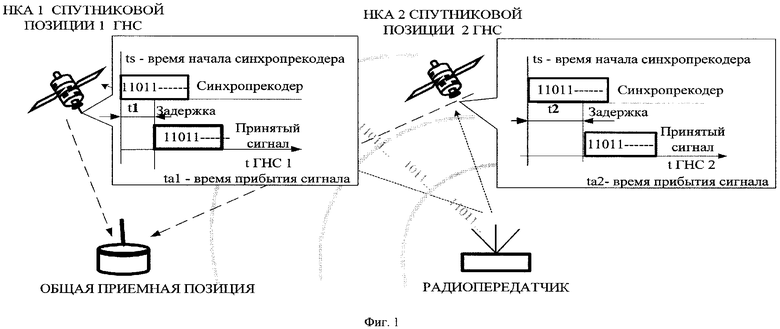
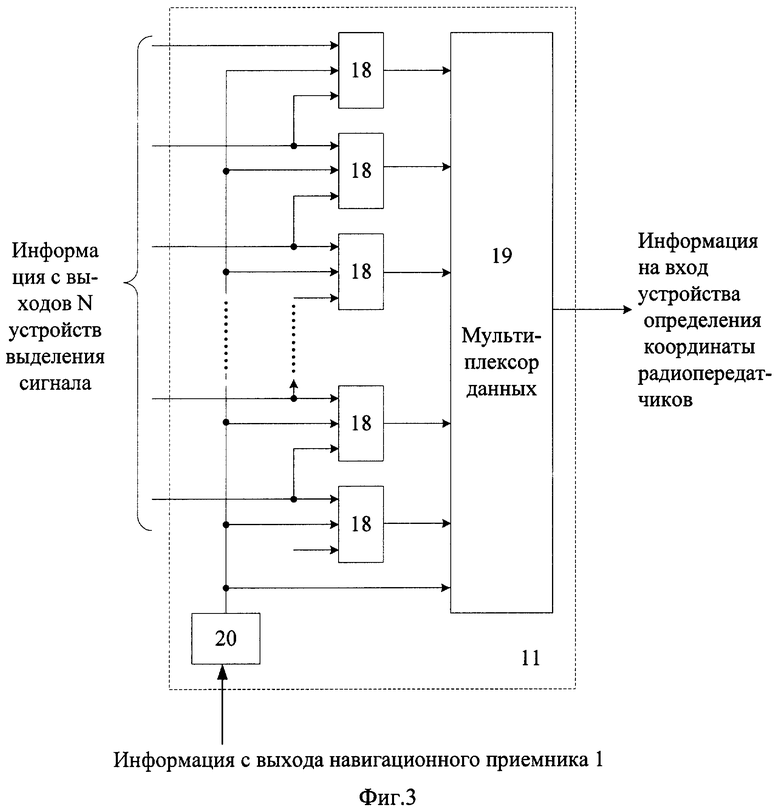
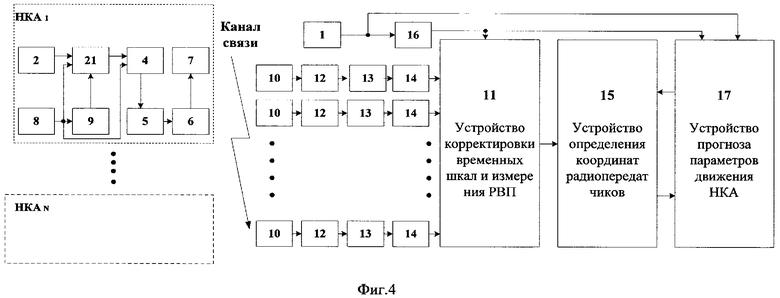
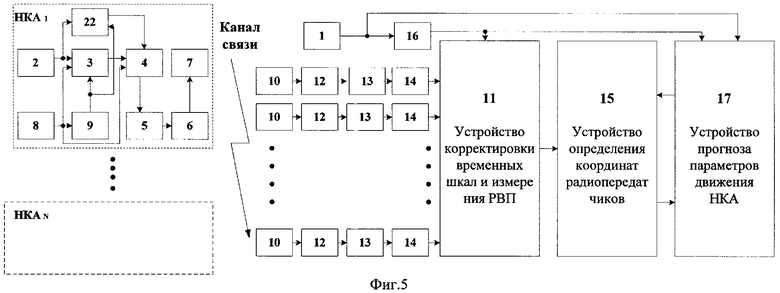
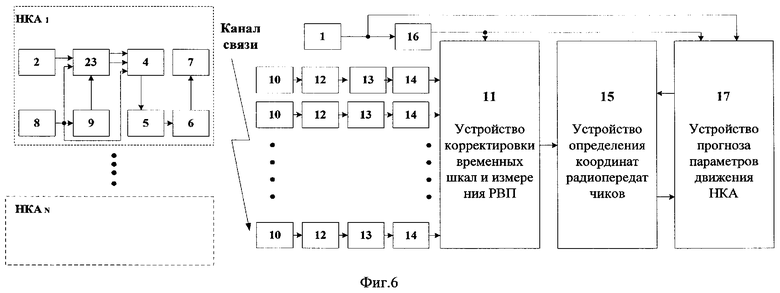
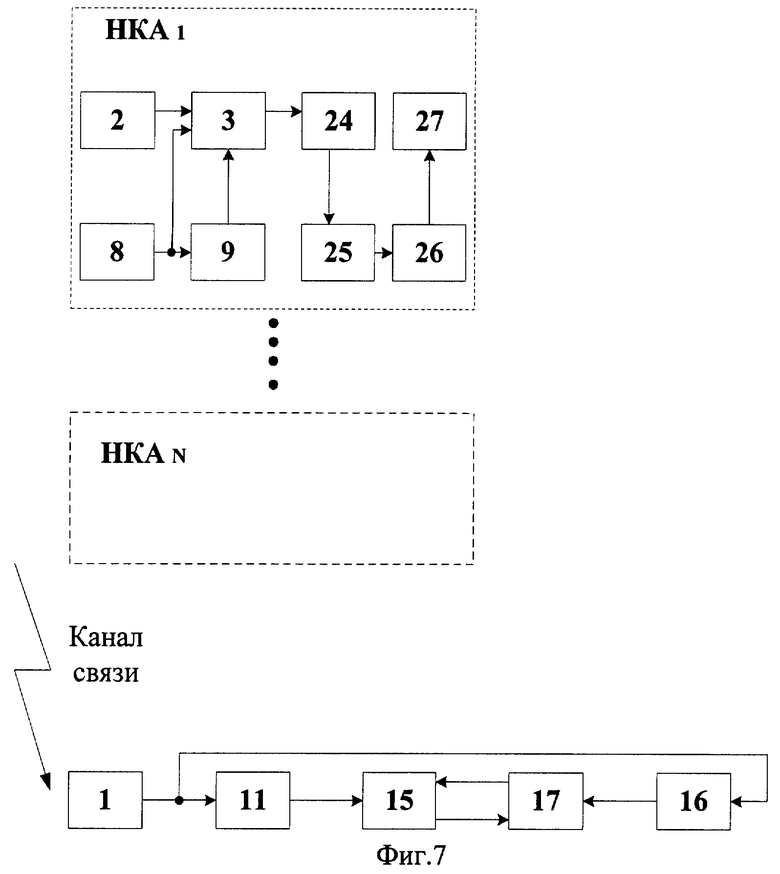
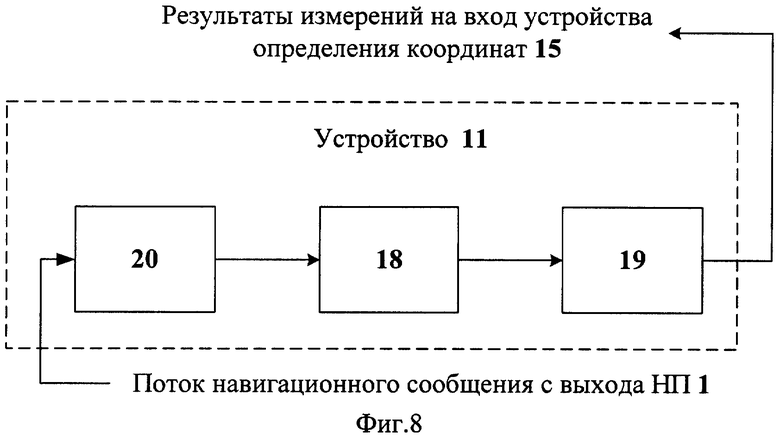
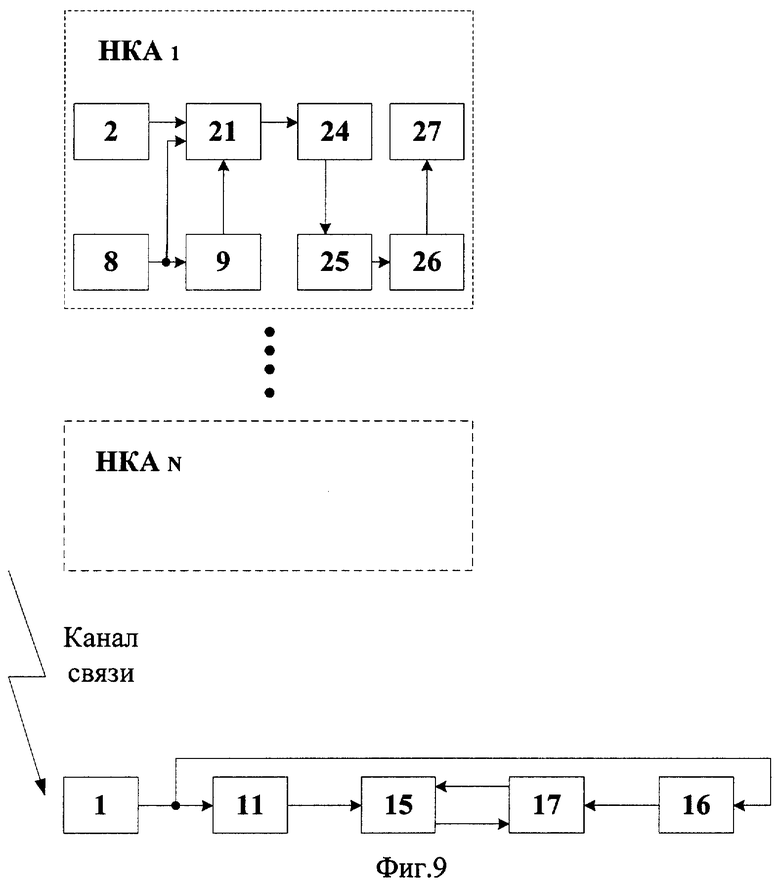
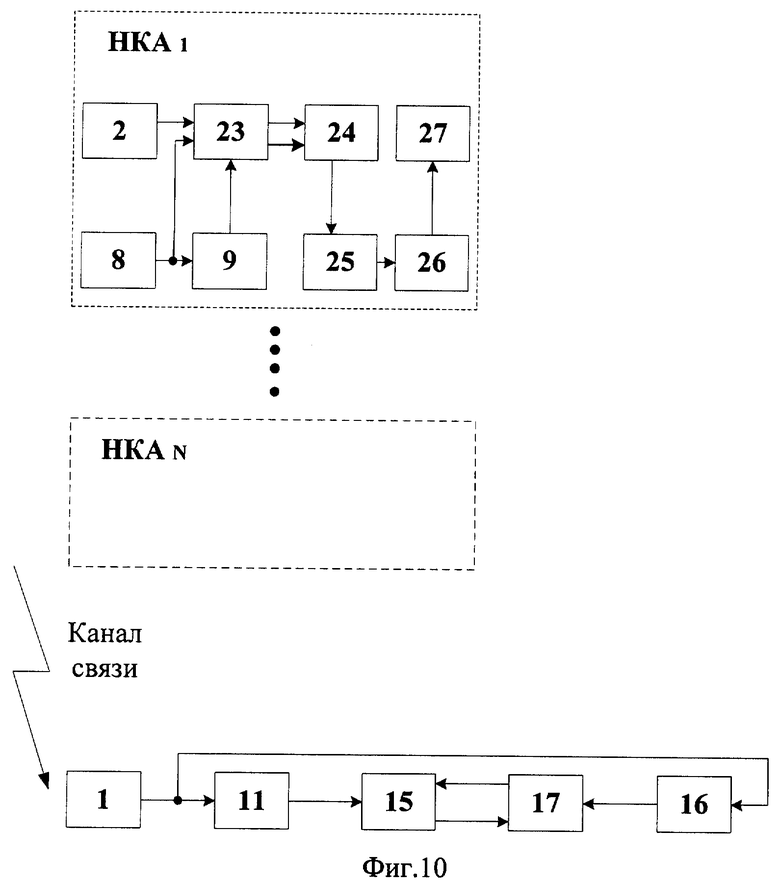
Изобретение относится к технике связи и может использоваться для определения координат радиопередатчиков с использованием глобальных навигационных систем (ГНС). Достигаемый технический результат заключается в повышении точности определения координат, расширении зоны поиска и оперативности их доведения до потребителя. Указанный результат получают за счет использования в качестве разнесенных приемных позиций спутниковых позиций ГНС и за счет осуществления измерений времен прихода сигнала относительно первичных временных шкал ГНС с последующей передачей результатов измерений на пункты наблюдения и поиска. При оснащении навигационных космических аппаратов ГНС типа ГЛОНАСС и НАВСТАР измерителями времени прихода сигнала, например, от радиобуев АРБ-406 с передачей результатов измерения любому потребителю, оснащенному средствами приема и обработки измерений и навигационной информации, потребитель сможет оперативно и с высокой точностью определить координаты терпящих бедствие и сразу же попытаться прийти к ним на помощь. 3 н. и 12 з.п. ф-лы, 10 ил.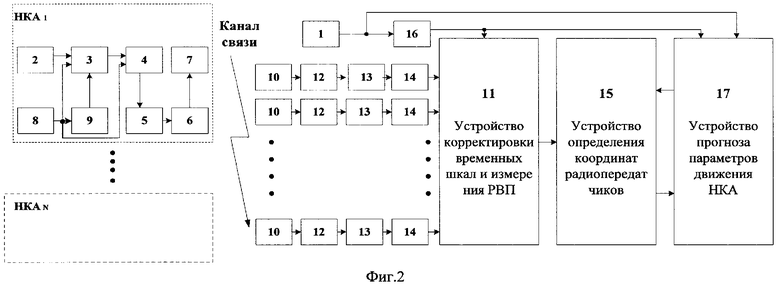
| US 6266012 B1, 24.07.2001 | |||
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
| Тахометр | 1933 |
|
SU35444A1 |
| СПОСОБ КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257616C1 |
| US 6138026 А, 24.10.2000 | |||
| ТУРБИНА, ДЕЙСТВУЮЩАЯ ГОРЕНИЕМ ПОРОХА | 1929 |
|
SU20882A1 |

