Область техники, к которой относится изобретение
Настоящее изобретение относится к способу дробления материала между первой дробильной поверхностью и второй дробильной поверхностью дробилки.
Настоящее изобретение дополнительно относится к системе дробления, содержащей дробилку, имеющую первую дробильную поверхность и вторую дробильную поверхность для дробления между ними материала.
Предпосылки создания изобретения
Дробилка может быть использована для эффективного дробления материала, такого как камень, руда и так далее, на более мелкие части. Такое дробление часто является одним из этапов преобразования, например, камня, добываемого посредством взрыва в шахтах, посредством взрыва при осуществлении дорожных проектов, при разрушении зданий и так далее, в зернистый материал, который может использоваться на плавильном заводе в качестве заполняющего материала для дорожной конструкции и так далее.
Одним из примеров дробилки такого типа, которая пригодна для дробления более крупных объектов на пригодный зернистый материал, является инерционная конусная дробилка, пример которой раскрыт в патентном документе EP 2116307. В такой инерционной конусной дробилке материал дробят между наружным дробильным корпусом, которой установлен в раму, и внутренним дробильным корпусом, который установлен на дробильной головке. Дробильная головка установлена на дробильный вал. Неуравновешенный груз размещен на цилиндрической втулке, окружающей дробильный вал. Двигатель выполнен с возможностью вращения цилиндрической втулки. Такое вращение заставляет неуравновешенный груз вращаться и отклоняться к стороне, заставляя дробильный вал, дробильную головку и внутренний дробильный корпус вращаться и дробить материал, который подается в дробильную камеру, образованную между внутренним и наружным дробильными корпусами. Дробилкой можно управлять для получения требуемого состава раздробленного продукта.
Сущность изобретения
Целью настоящего изобретения является разработка эффективного способа дробления различных типов материалов.
Эта цель достигается посредством способа дробления материала между первой дробильной поверхностью и второй дробильной поверхностью дробилки, содержащего:
измерение параметра дробления и
анализ на основе измеренного параметра дробления к какому типу относится материал, дробящийся в дробилке.
Преимущество этого способа заключается в том, что сама дробилка используется в качестве измерительного инструмента для определения того к какому типу относится материал, дробящийся в конкретном случае. Следовательно, очень эффективным образом и при ограниченных инвестициях становится возможным анализировать к какому типу относится материал, дробящийся в настоящий момент в дробилке.
В соответствии с одним вариантом осуществления этап анализа того к какому типу относится материал, дробящийся в дробилке, включает в себя анализ того какой по меньшей мере из двух материалов дробится в дробилке. Преимущество этого варианта осуществления заключается в том, что если два различных материала дробятся в дробилке, работа дробильной установки может быть соответственно адаптирована для получения эффективной характеристики для такого соответствующего типа материала.
В соответствии с одним вариантом осуществления способ дополнительно содержит после анализа того к какому типу относится материал, дробящийся в дробилке, определение того, произошло ли или нет изменение дробящегося материала. Преимущество этого варианта осуществления заключается в том, что изменения в дробящемся материале могут быть определены автоматически, для того чтобы могли быть приняты подходящие меры для соответственной адаптации процесса дробления.
В соответствии с одним вариантом осуществления способ дополнительно содержит выбор местоположения по меньшей мере из двух альтернативных местоположений, к которому раздробленный материал должен быть направлен на основании анализа того к какому типу относится материал, дробящийся в дробилке. Преимущество этого варианта осуществления заключается в том, что раздробленный материал может быть автоматически направлен к соответствующему местоположению по меньшей мере из двух возможных местоположений на основании того к какому типу материала относится раздробленный материал.
В соответствии с одним вариантом осуществления способ дополнительно содержит выбор значения по меньшей мере для одного рабочего параметра дробилки по меньшей мере из двух альтернативных значений рабочего параметра дробилки на основании анализа того к какому типу относится материал, дробящийся в дробилке. Преимуществом этого варианта осуществления является то, что после определения того к какому типу относится материал, дробящийся в дробилке, дробилкой можно управлять для дробления рассматриваемого материал наиболее подходящим образом, принимая во внимание предполагаемое использование рассматриваемого материала.
В соответствии с одним вариантом осуществления способ дополнительно содержит выбор значения по меньшей мере для одного рабочего параметра расположенного на выходе оборудования, обрабатывающего раздробленный материал, выходящий из дробилки, по меньшей мере из двух альтернативных значений рабочего параметра на основе анализа того к какому типу относится материал, дробящийся в дробилке. Преимущество этого варианта осуществления заключается в том, что дополнительная обработка раздробленного материала в мельнице, флотационном устройстве, сите или в другом выходном оборудовании, получающем раздробленный материал из дробилки, может быть выполнена как можно более эффективно, используя информацию о типе материала, который дробится.
В соответствии с одним вариантом осуществления параметр дробления включает в себя потребление мощности дробилкой. Преимущество этого варианта осуществления заключается в том, что потребляемая мощность легко измеряется и часто обеспечивает соответствующую информацию о дробящемся материале.
Дополнительной целью настоящего изобретения является разработка системы дробления, которая эффективна при дроблении материалов различных типов.
Эта цель достигается посредством системы дробления, содержащей дробилку, имеющую первую дробильную поверхность и вторую дробильную поверхность для дробления между ними материала, причем система дробления дополнительно содержит систему управления, выполненную с возможностью измерения по меньшей мере одного параметра дробления и анализа на основе по меньшей мере одного параметра дробления к какому типу относится материал, дробящийся в дробилке.
Преимущество этой системы дробления заключается в том, что сама дробилка становится измерительным инструментом для определения того к какому типу относится материал, дробящийся в дробилке. На основе такой информации полученная характеристика дробления и установочная величина системы дробления могут подвергаться управлению более эффективно. Более того, работа расположенного на выходе обрабатывающего устройства, такого как мельница или флотационное устройство, размещенное для дополнительной обработки раздробленного материала, выходящего из дробилки, также может подвергаться управлению на основе информации о том к какому типу относится дробящийся материал.
В соответствии с одним вариантом осуществления система дробления дополнительно содержит станцию сбора материала, размещенную для сбора материала, раздробленного в дробилке, причем система управления адаптирована для управления станцией сбора материала на основе типа материала, который дробится в дробилке. Преимущество этого варианта осуществления заключается в том, что различные материалы различных типов могут быть направлены в различные местоположения по выбору для дальнейшей обработки различными способами.
В соответствии с одним вариантом осуществления система управления выполнена с возможностью управления по меньшей мере одним рабочим параметром дробилки на основе определенного типа материала, который дробится в дробилке. Преимущество этого варианта осуществления заключается в том, что процедура дробления может быть оптимизирована для материала, дробящегося в конкретном случае.
В соответствии с одним вариантом осуществления дробилка является дробилкой, выбранной среди гирационных дробилок и щековых дробилок. Преимущество этого варианта осуществления заключается в том, что гирационные дробилки и щековые дробилки пригодны для дробления различных типов материалов. Более того, дробили этих типов могут подвергаться управлению для дробления различных типов материалов двумя различными образами.
В соответствии с одним вариантом осуществления дробилка является инерционной конусной дробилкой. Инерционная конусная дробилка легко управляется для дробления двух различных типов материалов двумя различными образами. Следовательно, при инерционной конусной дробилке два материала, очень отличающихся друг от друга своими свойствами, могут быть раздроблены в одной и той же дробилке, и система дробления способна определить какой из двух таких материалов дробится в конкретном случае.
Дополнительные цели и отличительные признаки настоящего изобретения очевидны из последующего подробного описания и формулы изобретения.
Краткое описание чертежей
Далее изобретение описано более подробно со ссылкой на сопроводительные чертежи, на которых:
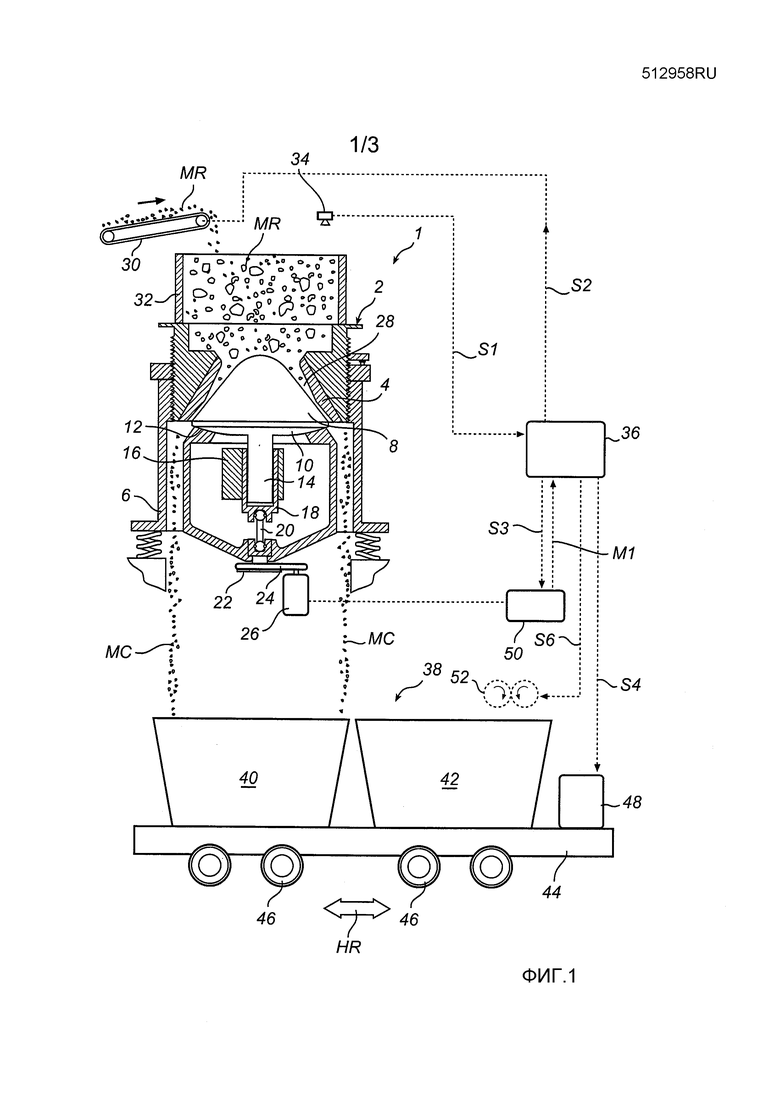
Фиг.1 представляет собой схематический вид сбоку системы дробления в соответствии с первым вариантом осуществления.
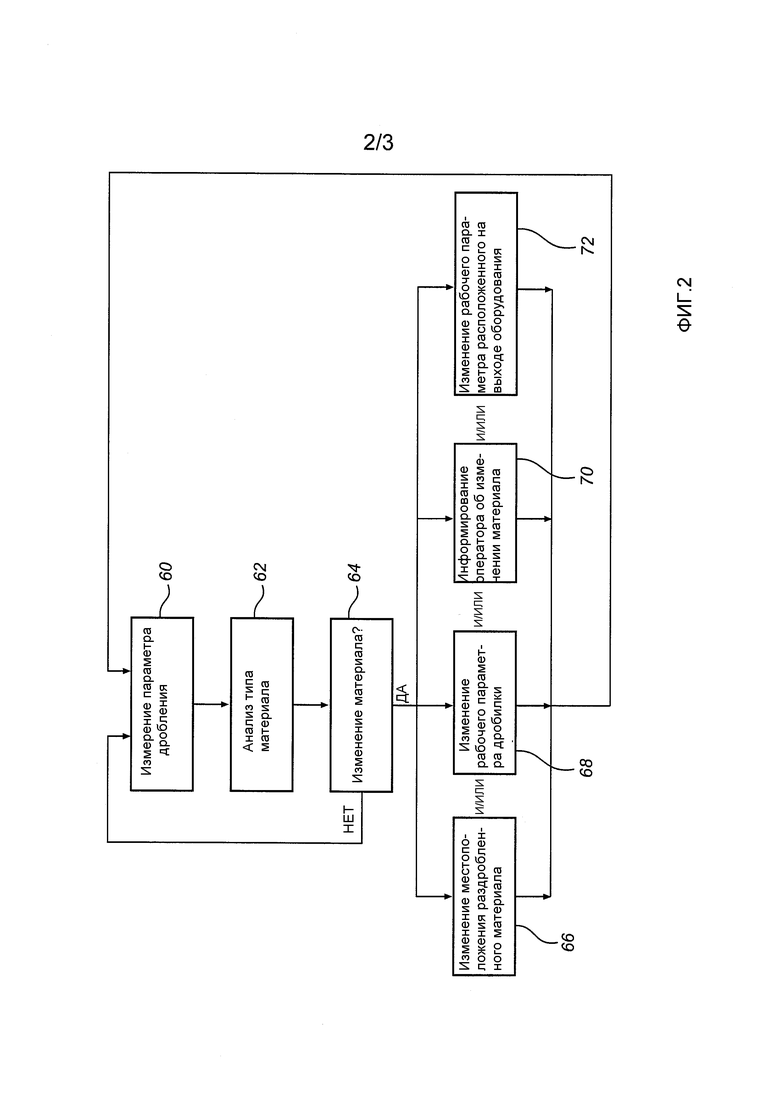
Фиг.2 представляет собой блок-схему, показывающую способ работы системы дробления.
Фиг.3 представляет собой схематический вид сбоку системы дробления в соответствии со вторым вариантом осуществления.
Описание предпочтительных вариантов осуществления
На Фиг.1 схематически показана система дробления 1 в соответствии с первым вариантом осуществления. Система дробления 1 содержит гирационную дробилку 2, которая является дробилкой инерционного конусного типа. Дробилка 2 содержит первую дробильную поверхность в форме наружного дробильного корпуса 4, который установлен в раме 6, и вторую дробильную поверхность в форме внутреннего дробильного корпуса 8, который установлен на дробильную головку 10. Дробильная головка 10 опирается на сферический подшипник 12. Дробильная головка 10 установлена на дробильный вал 14. Неуравновешенный груз 16 расположен на цилиндрической втулке 18, окружающей дробильный вал 14. Цилиндрическая втулка 18 соединена со шкивом 22 через ведущий вал 20. Шкив 22 соединен с двигателем 26 дробилки через приводной ремень 24. Двигатель 26 дробилки выполнен с возможностью вращения шкива 22 и, следовательно, цилиндрической втулки 18. Такое вращение втулки 18 заставляет неуравновешенный груз 16 вращаться и отклоняться к стороне, заставляя дробильный вал 14, дробильную головку 10 и внутренний дробильный корпус 8 перемещаться по окружности и дробить материал, который подается в дробильную камеру 28, образованную между наружным и внутренним дробильными корпусами 4, 8. Сила дробления, действующая на материал MR в дробильной камере 28, взаимосвязана с числом оборотов в минуту (об/мин), при которых двигатель 26 дробилки 26 вращает цилиндрическую втулку 18 и неуравновешенный груз 16, причем большее число оборотов в минуту приводит к большей силе дробления.
Конвейер 30 подачи материала предусмотрен для перемещения дробимого материала MR в гирационную дробилку 2 и для падения дробимого материала MR в бункер 32, расположенный над дробильной камерой 28. Датчик 34 уровня расположен над бункером 32 для измерения количества дробимого материала MR, который находится в бункере 32. Система управления 36 получает сигнал S1 от датчика 34 уровня, показывающий количество материала, находящегося в бункере 32. На основе такого сигнала система управления 36 посылает управляющий сигнал S2 к конвейеру 30 подачи материала для подачи необходимого количества материала MR в бункер 32 для поддерживания постоянного уровня материала MR в бункере 32. Обычно система управления 36 управляет конвейером 30 подачи материала так, чтобы бункер 32 был заполнен материалом MR.
После дробления в дробильной камере 28 раздробленный материал MC падает вертикально вниз из дробилки 2. Под дробилкой 2 расположена станция 38 сбора материала для сбора раздробленного материала MC. В варианте осуществления изобретения, показанном на фиг.1, станция 38 сбора материала схематически показана как станция, содержащая первый сборный контейнер 40 для сбора раздробленного материала первого типа и второй сборный контейнер 42 для сбора раздробленного материала второго типа. В варианте осуществления, показанном на фиг.1, первый и второй сборные контейнеры 40, 42 расположены на трейлере 44, который имеет колеса 46 и приводной двигатель 48 для горизонтального перемещения трейлера 44, как показано стрелкой HR. Приводной двигатель 48 может перемещать трейлер 44 между первым местоположением, которое показано на фиг.1, в котором первый сборный контейнер 40 расположен под дробилкой 2 для сбора раздробленного материала MC, и вторым местоположением, в котором второй сборный контейнер 42 расположен под дробилкой 2 для сбора раздробленного материала MC. Очевидно, что хотя на фиг.1 показаны первый и второй сборные контейнеры 40, 42, станция 38 сбора материала с таким же успехом может содержать один или более контейнеров, перемещающих раздробленный материал к каждому из двух или более местоположений. Кроме того, станция 38 сбора материала в качестве дополнительной альтернативы также может содержать сборный бункер, собирающий раздробленный материал MC. Из такого бункера собранный раздробленный материал MC может транспортироваться, по меньшей мере, в каждое из двух различных местоположений.
Система управления 36 выполнена с возможностью передачи сигнала S3 к регулятору 50 двигателя для того, чтобы двигатель 26 дробилки заставлял цилиндрическую втулку 18 и, следовательно, неуравновешенный груз 16 вращаться с определенным числом об/мин, например 500 об/мин, для достижения требуемой силы дробления в дробильной камере 28. Регулятор 50 двигателя управляет мощностью, подаваемой к двигателю 26 дробилки, чтобы заставлять цилиндрическую втулку 18 и, следовательно, неуравновешенный груз 16 вращаться с требуемым числом об/мин.
Регулятор 50 двигателя выполнен с возможностью передачи измерительного сигнала M1 к системе управления 36. Измерительный сигнал M1 содержит информацию о мощности, например, в киловаттах (кВт), которую потребляет двигатель 26 дробилки для вращения цилиндрической втулки 18 при определенных об/мин, например при 500 об/мин.
Система управления 36 осуществляет анализ информации, полученной от регулятора 50 двигателя для определения того к какому типу относится материал, дробящийся в настоящий момент в дробилке 2. Например, на железном руднике может существовать два или больше типов руды: первый тип руды, являющейся высококачественной относительно содержания в ней железа, которую относительно трудно дробить, и второй тип руды, являющейся низкокачественной относительно содержания в ней железа, которую относительно легко дробить. При первом типе руды достаточно умеренного дробления материала, например от среднего размера, составляющего 100 мм, до среднего размера, составляющего 10 мм, для подготовки первого типа руды к использованию в производстве железа. С другой стороны, при втором типе руды перед использованием руды второго типа в производстве железа должен выполняться процесс обогащения. Такое обогащение выполняется материалом относительно тонкого измельчения. Следовательно, при втором типе руды подходит сильное дробление материала, например от среднего размера, составляющего 100 мм, до среднего размера, составляющего 4 мм, для подготовки второго типа руды для обогащения. Часто трудно понять какой тип материала, первый или второй тип руды, подается в настоящий момент в дробилку 2 из конвейера 30.
Система управления 36 может сравнивать потребление мощности, измеренное регулятором 50 двигателя с набором значений по мощности, относящихся к различным материалам, которые имеются в руднике. Набор значений по мощности может содержать матрицу возможных материалов и соответствующую мощность, потребляемую при различных об/мин. Пример показан в таблице 1:
Мощность, потребляемая высококачественной и низкокачественной рудой при различных об/мин
Система управления 36 использует дробилку 2 в качестве измерительного инструмента для определения того какой тип руды дробится в настоящий момент в дробилке 2. Если, например, система управления 36 отправила сигнал S3 к регулятору 50 двигателя, дающему команду на 500 об/мин, и измеренная мощность в сигнале M1 составляет 200 кВт, тогда система управления 36 может определить, что материал MR, находящийся в настоящий момент в дробилке 2, является низкокачественным рудным материалом. Система управления 36 может затем послать сигнал S4 к приводному двигателю 48 станции 38 сбора материала для того, чтобы приводной двигатель 48 перемещал трейлер 44 в такое местоположение, в котором первый сборный контейнер 40 располагается под дробилкой 2 и собирает раздробленный материал MC, как показано на фиг.1. Если в дальнейшем измеренная мощность увеличивается до 400 кВт все еще при 500 об/мин двигателя 26 дробилки, тогда система управления 36 может определить, что материал MR, подаваемый в настоящий момент в дробилку 2, является высококачественным материалом. В ответ на такой вывод система управления 36 может послать сигнал S4 к приводному двигателю 48 станции 38 сбора материала с тем, чтобы приводной двигатель 48 перемещал трейлер 44 в такому местоположению, в котором второй сборный контейнер 42 располагается под дробилкой 2 и собирает раздробленный материал MC. Следовательно, система управления 36 использует дробилку 2 в качестве измерительного инструмента для определения того к какому типу относится материал, дробящийся в настоящий момент в дробилке 2, и управляет станцией 38 сбора материала для сбора раздробленного материала MC, представляющего собой руду низкокачественного типа, в первом сборном контейнере 40 и сбора раздробленного материала MC, представляющего собой высококачественную руду, во втором сборном контейнере 42.
Более того, система управления 36 также может использовать информацию, полученную от регулятора 50 двигателя для управления того, каким образом материал должен быть раздроблен. Как описывалось ранее, желательно дробить высококачественный рудный материал до среднего размера, составляющего около 10 мм, и низкокачественный рудный материал до среднего размера, составляющего около 4 мм. С этой целью для достижения эффективного дробления до требуемых размеров дробление низкокачественного рудного материала может быть выполнено при 600 об/мин. Следовательно, обращаясь к таблице 1, если система управления 36 передала сигнал S3 к регулятору 50 двигателя для выполнения дробления при 500 об/мин для высококачественного рудного материала, и мощность уменьшается от 400 кВт до 200 кВт, тогда система управления 36 может определить, что в настоящий момент в дробилку 2 подается низкокачественный рудный материал. В ответ на такой вывод система управления 36 может отправить сигнал S3 к регулятору 50 двигателя для того, чтобы число об/мин двигателя дробилки увеличилось до 600 об/мин для достижения эффективного дробления низкокачественного рудного материала. В соответствии с одним вариантом осуществления одновременно с этим система управления 36 может отправить сигнал S4 к станции 38 сбора материала для сбора такого низкокачественного рудного материала в первый сборный контейнер 40 в соответствии с принципами, описанными выше в настоящем документе. Затем, если мощность увеличивается от 400 кВт до 800 кВт, тогда система управления 36 может, как показано в таблице 1, определить, что в настоящий момент в дробилку 2 подается высококачественный рудный материал. В ответ на такой вывод система управления 36 может отправить сигнал S3 к регулятору 50 двигателя для того, чтобы число об/мин двигателя 26 дробилки было уменьшено до 500 об/мин для достижения эффективного дробления высококачественного рудного материала. Сигнал S4 может быть послан к станции 38 сбора материала для сбора высококачественного рудного материала во второй сборный контейнер 42. Следовательно, система управления 36 использует дробилку 2 в качестве измерительного инструмента для определения того, к какому типу относится материал, дробящийся в дробилке 2. На основе такой информации система управления 36 может управлять местоположением раздробленного материала MC, то есть первым или вторым сборным контейнером 40, 42, и/или управлять рабочим параметром дробилки, то есть дроблением при 500 или 600 об/мин, влияя на дробление материала.
Более того, система управления 36 может также использовать информацию, полученную от регулятора 50 двигателя для управления работой расположенных на выходе устройств, то есть оборудования, которое в дальнейшем должно обрабатывать раздробленный материал MC. Примеры таких расположенных на выходе устройств включают в себя мельницы для тонкого измельчения, мельницы, сетки, флотационные устройства и так далее. На фиг.1 схематически показана вальцовая мельница 52. Раздробленный материал MC также может обрабатываться в вальцовой мельнице 52 сразу после покидания дробилки 2 или после того как раздробленный материал MC был перемещен от дробилки для дальнейшей обработки. На основе определения типа материала, дробимого в дробилке 2, система управления 36 может отправить сигнал S6 для управления по меньшей мере одним рабочим параметром, таким как мощность двигателя, число об/мин или зазор между роликами мельницы 52. Например, система управления 36 может отправить сигнал S6 к мельнице 52 и выдать указание мельнице 52 перемалывать раздробленный материал MC при первом числе об/мин мельницы в случае, когда было определено, что раздробленный материал MC является низкокачественным рудным материалом, и перемалывать раздробленный материал MC при втором числе об/мин мельницы, отличающемся от первого числа об/мин, в случае, когда было определено, что раздробленный материал MC является высококачественным рудным материалом.
На фиг.2 схематически показан способ дробления материала. На первом этапе 60 измеряется параметр дробления, такой как мощность, потребляемая двигателем 26 дробилки для поддержания определенного числа об/мин дробилки 2.
На втором этапе 62 измеренный параметр дробления анализируется для определения того к какому типу относится дробящийся материал. Такой анализ может быть основан, например, на проиллюстрированной выше таблице 1 или на математическом выражении, кривой или тому подобном, что показывает отношение между параметром дробления и типом дробимого материала.
На третьем этапе 64 определяется, изменился ли тип материала, который подвергается дроблению в дробилке 2. Если ответ на такой вопрос - "НЕТ", тогда этап 60 и этапы 62 и 64 просто повторяются. Если ответ на такой вопрос - "ДА", тогда начинаются этапы 66, 68, 70 и 72.
На первом альтернативном четвертом этапе 66 изменяется местоположение раздробленного материала. Такое изменение местоположения может включать в себя управление конвейером или трейлером 44 так, чтобы изменение дробимого материала, например, от низкокачественной руды до высококачественной руды, также включало в себя изменение местоположения раздробленного материала MC, от местоположения для низкокачественной руды до местоположения высококачественной руды.
На втором альтернативном четвертом этапе 68 рабочий параметр дробилки изменяют после определения того, что дробимый материал изменился. Таким рабочим параметром дробилки может быть число об/мин двигателя 26 дробилки, ширина зазора между наружным дробильным корпусом 4 и внутренним дробильным корпусом 8 или другой параметр, влияющий на свойства раздробленного материала.
На третьем альтернативном четвертом этапе 70 осуществляется информирование оператора об изменении типа материала, дробящегося в дробилке.
На четвертом альтернативном четвертом этапе 72 рабочий параметр расположенного на выходе оборудования, такого как расположенное на выходе устройство в форме, например, мельницы 52, обрабатывающей раздробленный материал MC, выходящий из дробилки 2, изменяют после определения того, что дробимый материал изменился. Следовательно, дробилка 2 может быть использована в качестве измерительного инструмента, и информация, полученная от дробилки 2, касающаяся того, материал какого типа дробится в определенном случае, используется для управления одним или более расположенными на выходе устройствами 52, дополнительно обрабатывающими раздробленный материал MC, выходящий из дробилки 2.
Четыре альтернативных четвертых этапа 66, 68, 70 и 72 могут быть выполнены в любой комбинации. Следовательно, в соответствии с одним примером, второй альтернативный четвертый этап 68, то есть изменение рабочего параметра дробилки, может быть объединен с информированием оператора в соответствии с этапом 70 и управлением параметром расположенного на выходе устройства в соответствии с этапом 72. В соответствии с другим примером первый альтернативный четвертый этап 66 является единственным выполняемым этапом.
На фиг.3 схематически показана система дробления 101 в соответствии со вторым вариантом осуществления. Система дробления 101 содержит щековую дробилку 102. Пример щековой дробилки описан в американском патентном документе US 6932289. Щековая дробилка 102 содержит первую дробильную поверхность в форме неподвижной дробильной пластины 104, которая установлена в раме 106, и вторую дробильную поверхность в форме подвижной дробильной пластины 108, которая установлена на подвижную щеку 110. Подвижная щека 110 соединена с колесом 112, имеющим эксцентриковый вал 114 и распорную плиту 116. Распорная плита 116 соединена с гидравлическим цилиндром 118, дающим возможность управления зазором GP между неподвижной дробильной пластиной 104 и подвижной дробильной пластиной 108. Двигатель 126 дробилки выполнен с возможностью вращения, посредством приводного ремня 124, колеса 112 и эксцентрикового вала 114, чтобы заставлять подвижную щеку 110 "перемалывать" материал MR, подаваемый от конвейера 130 подачи материала в дробильную камеру 128, образованную между дробильными пластинами 104, 108.
После дробления в дробильной камере 128 раздробленный материал MC падает вертикально вниз из дробилки 102. Станция 138 сбора материала расположена под дробилкой 102 для сбора раздробленного материала MC. В варианте осуществления, показанном на фиг.3, станция 138 сбора материала содержит конвейер 144, который может быть повернут, как показано стрелкой TA, между первым местоположением, показанным на фиг.3, в котором раздробленный материал MC направляют к первому местоположению 140 материала, и вторым местоположением, в котором раздробленный материал MC направляют ко второму местоположению 142 материала.
Система управления 136 выполнена с возможностью отправки управляющего сигнала S3 к регулятору 150 двигателя для того, чтобы двигатель 126 дробилки заставлял подвижную щеку 110 колебаться с определенной частотой. Такая частота может быть различной для различных материалов или быть одинаковой для всех типов материалов.
Регулятор 150 двигателя выполнен с возможностью отправки сигнала M1 к системе управления 136. Измеренный сигнал M1 содержит информацию о мощности, например в кВт, которую потребляет двигатель 126 дробилки для вызывания колебаний подвижной щеки 110 с заданной частотой.
Система управления 136 осуществляет анализ информации, полученной от регулятора 150 двигателя для определения того, к какому типу относится материал, дробящийся в настоящий момент в дробилке 102 в соответствии с принципами, подобными тем, которые были описаны выше со ссылкой на фиг.1.
Система управления 136 может сравнивать потребление мощности, измеренное регулятором 150 двигателя с набором значений по мощности, типичных для различных материалов, которые могут дробиться. Различные материалы могут включать в себя материалы с различной степенью примесей, таких как глина или гравий, делая их более или менее легкими для дробления. Набор значений по мощности может содержать матрицу возможных материалов и соответствующую мощность, потребляемую при различной ширине зазора GP. В таблице 2 схематически показан пример:
Мощность, потребляемая различными материалами при различной ширине зазора
Система управления 136 использует дробилку 102 в качестве измерительного инструмента для определения того к какому типу относится материал, дробящийся в настоящий момент в дробилке 102. Если, например, измеренная мощность в сигнале M1 составляет 200 кВт, и ширина зазора GP составляет 100 мм, то система управления 136 может определить, из данных в таблице 2, что материал MR, подаваемый в настоящий момент в дробилку 102, содержит большое количество включений. Если в дальнейшем измеренная мощность повышается до 400 кВт при одной и той же ширине зазора GP, тогда система управления 136 может определить, что материал MR, подаваемый в настоящий момент в дробилку 102, содержит небольшое количество включений. В ответ на такой вывод система управления 136 может отправить сигнал S4 к приводному двигателю 148 станции 138 сбора для того, чтобы приводной двигатель 148 поворачивал конвейер 144 в такое местоположение, в котором раздробленный материал MC направляют во второе местоположение 142 материала вместо первого местоположения 140 материала. Более того, система управления 136 может отправить сигнал S5 к гидравлическому цилиндру 118 для регулировки ширины зазора GP от 100 мм до 200 мм. Следовательно, система управления 136 использует дробилку 102 в качестве измерительного инструмента для определения того какой тип материала дробится в настоящий момент в дробилке, и для управления станцией 138 сбора для направления материала с большим количеством включений к первому местоположению 140 материала, и для направления материала с небольшим количеством включений ко второму местоположению 142 материала. Система управления 136 также управляет дробилкой 102 посредством регулировки ширины зазора GP с помощью гидравлического цилиндра 118 так, чтобы каждый тип материала дробился наиболее подходящим образом применительно к предполагаемому использованию рассматриваемого раздробленного материала MC.
Следует понимать, что в объеме прилагаемой формулы изобретения возможны многочисленные модификации вариантов осуществлений, описанных выше.
Выше в настоящем документе было описано, что способ и система дробления могут быть применены к гирационной дробилке 2 инерционного конусного типа или к дробилке 102 щекового типа. Следует понимать, что настоящее изобретение также может быть применено к другим типам дробилок. Например, настоящее изобретение также может быть применено к гирационным дробилкам такого типа, который имеет неподвижный эксцентрик, которые раскрыты в американском патентном документе US 4034922.
Выше в настоящем документе было описано, что измеренный параметр дробления может включать в себя мощность, поглощаемую дробилкой. Следует понимать, что другие параметры дробления также могут измеряться для использования в качестве основы для осуществления анализа того к какому типу относится материал, дробящийся в дробилке. Примеры таких параметров дробления включают в себя гидравлическое давление дробилки, вибрации дробилки, температуру дробилки, температуру смазки, смазывающей подшипники дробилки, и так далее. Также возможно основывать анализ того к какому типу относится материал, дробящийся в дробилке, на более чем одном параметре дробления. Например, в дробилке такого типа, который описан в американском патентном документе US 4034922, анализ того к какому типу относится материал, дробящийся в дробилке, может быть основан на измеренной мощности, потребляемой для вращения эксцентрика, и измеренном гидравлическом давлении в поршне в устройстве поршня, перемещающего вал дробильной головки в вертикальном направлении.
Выше в настоящем документе было описано, что система управления 136 может управлять шириной зазора GP между неподвижной дробильной пластиной 104 и подвижной дробильной пластиной 108 в щековой дробилке 102 для различных наборов значений в зависимости от типа материала, дробящегося в щековой дробилке 102. Следует понимать, что система управления 36 может также управлять шириной зазора между наружным и внутренним дробильными корпусами 4, 8 гирационной дробилки, являющейся дробилкой инерционного конусного типа или дробилкой с неподвижным эксцентриком, для различных наборов значений в зависимости от типа материала, дробящегося в гирационной дробилке. Также другие параметры, которые влияют на характеристику дробления и/или на которые влияет тип дробящегося материала, могут подвергаться управлению на основе анализа того к какому типу относится дробящийся материал.

Группа изобретений относится к способу дробления материалов различных типов и устройству для его осуществления. Способ дробления материала между первой дробильной поверхностью и второй дробильной поверхностью дробилки заключается в том, что измеряют параметр дробления и на основе измеренного параметра дробления анализируют к какому типу относится материал, дробящийся в дробилке. Система дробления содержит дробилку, имеющую первую дробильную поверхность и вторую дробильную поверхность для дробления между ними материала, систему управления, выполненную с возможностью измерения по меньшей мере одного параметра дробления и анализа на основе по меньшей мере одного параметра дробления к какому типу относится материал, дробящийся в дробилке. Способ и устройство посредством анализа параметров дробления обеспечивают возможность определения типа материала, дробящегося в конкретный момент времени. 2 н. и 12 з.п. ф-лы, 2 табл., 3 ил.
1. Способ дробления материала между первой дробильной поверхностью (4; 104) и второй дробильной поверхностью (8; 108) дробилки (2; 102), содержащий:
- измерение параметра дробления и
- анализ на основе измеренного параметра дробления к какому типу относится материал, дробящийся в дробилке (2; 102).
2. Способ по п.1, в котором этап анализа того к какому типу относится материал, дробящийся в дробилке (2; 102), включает в себя анализ того какой по меньшей мере из двух материалов дробится в дробилке (2; 102).
3. Способ по п.1 или 2, причем способ, дополнительно содержащий после анализа того к какому типу относится материал, дробящийся в дробилке (2; 102), выявление, произошло ли или нет изменение дробимого материала.
4. Способ по п.1 или 2, дополнительно содержащий выбор местоположения по меньшей мере из двух альтернативных местоположений (40, 42; 140, 142), в которое раздробленный материал должен быть направлен на основе анализа того к какому типу относится материал, дробящийся в дробилке (2; 102).
5. Способ по п.1 или 2, дополнительно содержащий выбор набора значений по меньшей мере для одного рабочего параметра дробилки на основе анализа того к какому типу относится материал, дробящийся в дробилке (2; 102).
6. Способ по п.1 или 2, дополнительно содержащий выбор значения по меньшей мере для одного рабочего параметра, расположенного на выходе оборудования (52), обрабатывающего раздробленный материал (MC), выходящий из дробилки (2), по меньшей мере из двух альтернативных значений рабочего параметра на основе того к какому типу относится материал, дробящийся в дробилке (2; 102).
7. Способ по п.1 или 2, в котором параметр дробления включает в себя потребление мощности дробилки.
8. Система дробления, содержащая дробилку (2; 102), имеющую первую дробильную поверхность (4; 104) и вторую дробильную поверхность (8; 108) для дробления между ними материала, отличающаяся тем, что система дробления (1; 101) дополнительно содержит систему управления (36; 136), выполненную с возможностью измерения по меньшей мере одного параметра дробления и анализа на основе по меньшей мере одного параметра дробления к какому типу относится материал, дробящийся в дробилке (2; 102).
9. Система дробления по п.8, в которой система управления (36; 136) выполнена с возможностью определения, произошло ли или нет изменение дробящегося материала.
10. Система дробления по п.8 или 9, дополнительно содержащая станцию (38; 138) сбора материала, сконструированную для сбора материала, раздробленного в дробилке (2; 102), причем система управления (36; 136) выполнена с возможностью управления станцией (38; 138) сбора материала на основе типа материала, дробящегося в дробилке (2; 102).
11. Система дробления по п.8 или 9, в которой система управления (36; 136) дополнительно выполнена с возможностью управления по меньшей мере одним рабочим параметром дробилки (2; 102) на основе проанализированного типа материала, дробящегося в дробилке (2; 102).
12. Система дробления по п.8 или 9, в которой система управления (36) дополнительно выполнена с возможностью управления по меньшей мере одним рабочим параметром расположенного на выходе устройства (52), обрабатывающего раздробленный материал (MC), выходящий из дробилки (2), на основе проанализированного типа материала, дробящегося в дробилке (2).
13. Система дробления по п.8 или 9, в которой дробилка является дробилкой, выбранной среди гирационных дробилок (2) и щековых дробилок (102).
14. Система дробления по п.13, в которой дробилка является инерционной конусной дробилкой (2).
| СПОСОБ ПОЛУЧЕНИЯ ПРОИЗВОДНЫХ ФИЗОСТИГМИНА (ВАРИАНТЫ) | 1993 |
|
RU2116307C1 |
| Способ регулирования комплекса дробления | 1985 |
|
SU1235533A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ В МЕЛЬНИЧНОМ АГРЕГАТЕ | 2006 |
|
RU2300798C1 |
| US 6932289 B2, 23.08.2005 | |||
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ МОКРОГО САМОИЗМЕЛЬЧЕНИЯ МАТЕРИАЛОВ В МЕЛЬНИЧНОМ АГРЕГАТЕ | 2000 |
|
RU2184615C2 |
| Способ контроля работы мукомольного вальцового станка | 1987 |
|
SU1576203A1 |

