Настоящее изобретение относится к способу и системе расчета взлетного веса летательного аппарата.
Детали летательного аппарата обычно подвергаются усталостному повреждению в ходе своего срока службы.
Детали, подвергаемые серьезному усталостному повреждению, конструируются с использованием спектра нагружения, соответствующего заданным полетным маневрам, выполняемым в течение заданных продолжительностей времени.
Другими словами, наиболее важные детали конструируются с учетом усталости на основе спектра нагружения и выпускаются с заданной усталостной долговечностью.
Существует необходимость в индустрии определять фактическую эксплуатационную усталость составляющих деталей летательного аппарата, с тем чтобы безопасно определять остаточный срок службы относительно усталостной долговечности, для которой они были сконструированы.
Одним из основных параметров для расчета фактической усталости составляющих деталей летательного аппарата является взлетный вес летательного аппарата.
По взлетному весу можно рассчитывать вес в различных полетных условиях, от которых зависят положения самолета в воздухе, оказывающие влияние на усталостное повреждение составляющих деталей.
Взлетный вес летательного аппарата обычно рассчитывается добавлением веса полезного груза, топлива и экипажа к весу летательного аппарата без нагрузки.
Существует необходимость в рамках индустрии в более точном способе расчета взлетного веса летательного аппарата, с тем чтобы более точно определять фактическую усталость составляющих деталей летательного аппарата.
Цель настоящего изобретения состоит в том, чтобы обеспечить способ расчета взлетного веса летательного аппарата, как заявлено в пункте 1 формулы изобретения.
Настоящее изобретение также относится к системе для расчета взлетного веса летательного аппарата, как заявлено в пункте 9 формулы изобретения.
Предпочтительный неограничивающий вариант осуществления настоящего изобретения далее будет описан в качестве примера со ссылкой на прилагаемые чертежи, на которых:
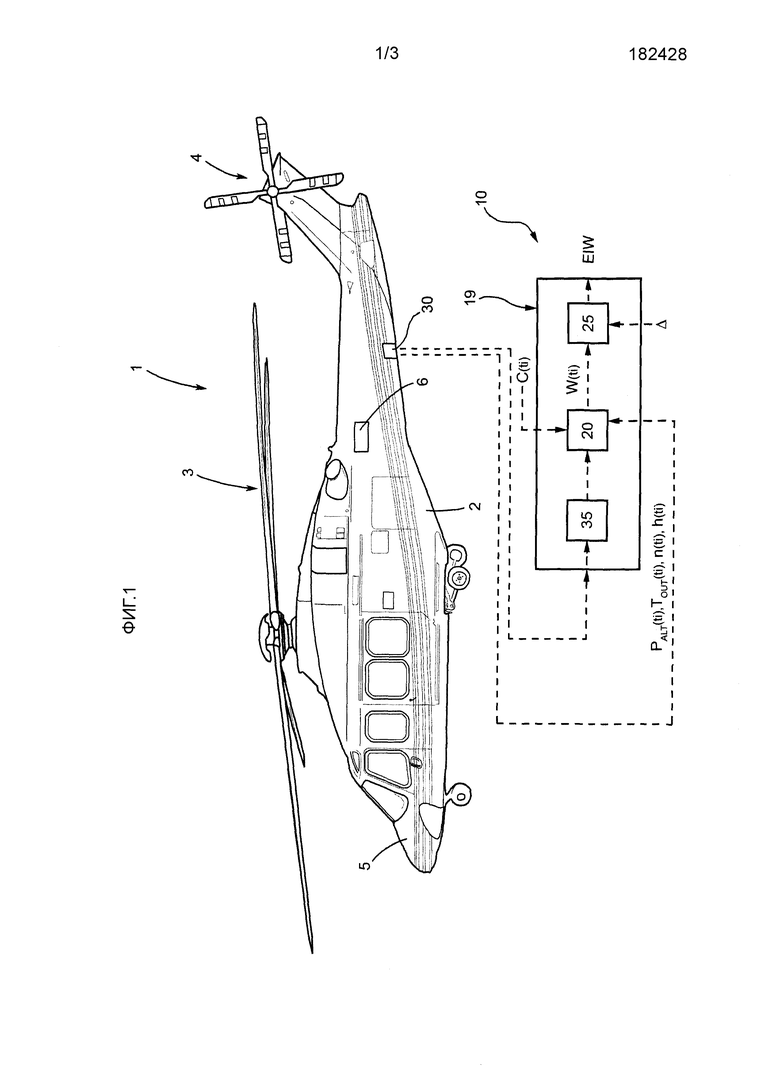
фиг.1 показывает летательный аппарат, в частности вертолет, содержащий систему расчета взлетного веса в соответствии с настоящим изобретением, и реализующую способ расчета взлетного веса согласно настоящему изобретению;
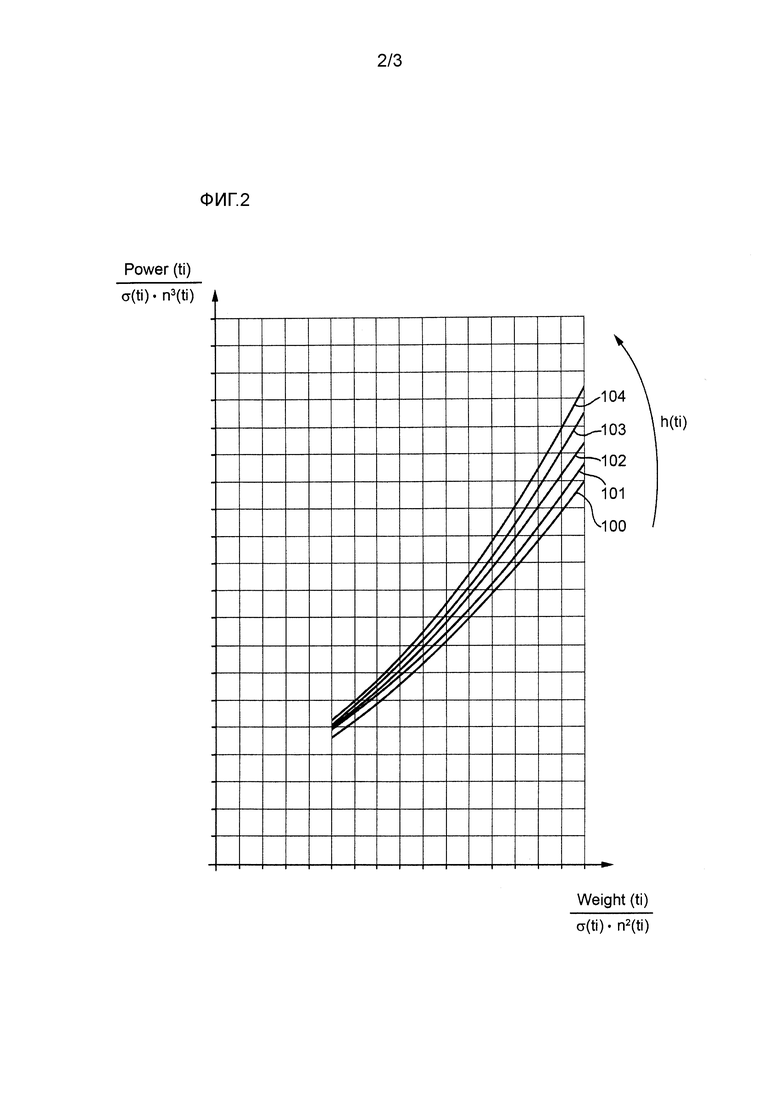
фиг.2 показывает характеристическую кривую, применяемую в системе по фиг.1;
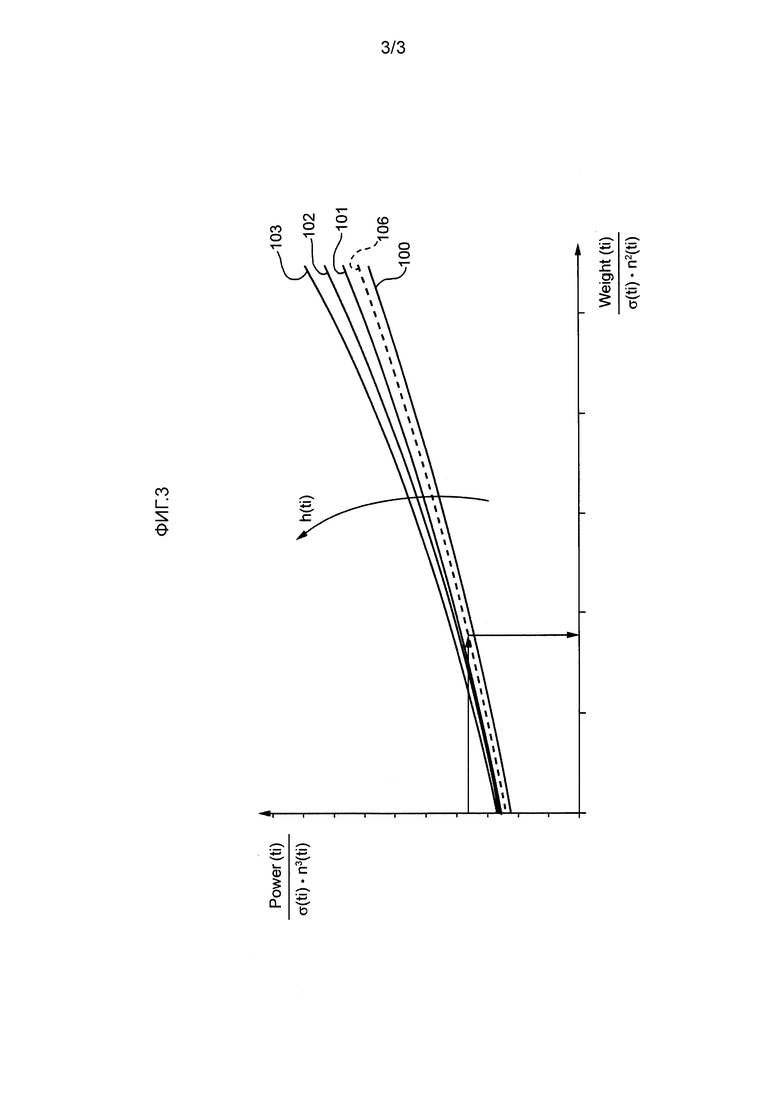
фиг.3 показывает интерполяцию характеристической кривой по фиг.2.
Номер 1 на фиг.1 указывает летательный аппарат - в показанном примере вертолет.
Вертолет 1 содержит фюзеляж 2 с носом 5; два двигателя 6 (просто схематично показанные на фиг.1); и несущий винт 3, установленный на верхнюю часть фюзеляжа 2 для создания подъемной силы и силы тяги, требуемых для подъема и приведения в движение вертолета 1.
Номер 10 на фиг.1 указывает систему для расчета взлетного веса вертолета 1.
Система 10 преимущественно содержит:
- каскад 20 регистрации для регистрации значений W(t1), W(t2), W(t3),..., W(ti),..., W(tn), связанных с весом вертолета 1 в некотором количестве соответствующих моментов времени t1, t2, t3,..., ti,..., tn, в которые вертолет 1 находится в горизонтальном полете; и
- каскад 25 расчета для расчета взлетного веса EIW вертолета 1 на основе значений W(t1), W(t2), W(t3),..., W(ti),..., W(tn).
В последующем описании, горизонтальный полет подразумевается означающим состояние, в котором вертолет летит на, по существу, постоянной высоте и скорости или осуществляет висение.
Система 10 предпочтительно также содержит:
- каскад 30 сбора данных для получения полетных параметров, таких как угол крена, угол тангажа, производная угла крена, производная угла тангажа, производная угла рыскания, истинная скорость полета вертолета 1, коэффициент нагрузки, измеренная радаром высота, вертикальная скорость, прямое ускорение вертолета, индикация шасси на земле, мощность и частота вращения двигателей 6, частота вращения несущего винта и измеренная барометром высота по давлению; и
- каскад 35 распознавания полетных условий, который, на основе полученных полетных параметров, определяет, находится или нет вертолет 1 в горизонтальном полете.
Каскад 30 сбора данных предназначен для получения полетных параметров с заданной частотой, например 3 Гц.
Каскад 35 распознавания предназначен для анализа полетных параметров, полученных каскадом 30 сбора данных, и для определения стабильного горизонтального полета вертолета 1, когда некоторые из параметров, полученных каскадом 30 сбора данных, остаются ниже соответственных пороговых значений на дольше, чем заданный временной интервал.
В описанном варианте осуществления, каскад 35 распознавания предназначен для определения стабильного висения вертолета 1, когда в течение по меньшей мере временного интервала ∆t:
- угол крена находится ниже порогового значения, например, в десять градусов;
- угол тангажа находится ниже порогового значения, например, в десять градусов;
- вертикальная скорость ниже порогового значения, например, 50 футов в минуту;
- измеренная радаром высота находится между нижним пороговым значением и верхним пороговым значением, например, 5 и 100 футами;
- истинная скорость полета вертолета 1 ниже 10 узлов.
В описанном примере, временной интервал ∆t равен по меньшей мере трем секундам.
Каскад 20 регистрации предназначен для регистрации значений W(t1), W(t2), W(t3),..., W(ti),..., W (tn) в некотором количестве моментов времени t1, t2, t3,..., ti,..., tn, в которых вертолет 1 находится в состоянии стабильного висения на соответственных разных или равных высотах h(t1), h(t2), h(t3),..., h(ti),..., h(tn).
Более точно, каскад 20 регистрации предназначен для приема параметров, полученных каскадом 30 сбора данных; для регистрации значений W(t1), W(t2), W(t3),..., W(ti),..., W(tn), связанных с весом вертолета 1, если каскад 35 распознавания определяет состояние стабильного висения вертолета 1; и для передачи значений W(t1), W(t2), W(t3),..., W(ti),..., W(tn), зарегистрированных в соответственные моменты t1, t2, t3,..., ti,..., tn, в каскад 25 расчета.
Каскад 20 регистрации предназначен для регистрации значений W(t1), W(t2), W(t3),..., W(ti),..., W(tn) для каждого состояния стабильного висения на основании:
- барометрической высоты и температуры наружного воздуха, PALT(ti) и TOUT(ti), зарегистрированных бортовыми измерительными приборами в момент времени ti и на высоте h(ti);
- коэффициента n(ti), пропорционального частоте вращения двигателе 6 в момент времени ti и на высоте h(ti);
- мощности Power(ti), создаваемой двигателями 6 в момент времени ti и на высоте h(ti); и
- некоторого количества характеристических кривых 100, 101, 102, 103, 104 (фиг.2 и 3), хранимых в каскаде 20 регистрации.
Более точно, каскад 20 регистрации регистрирует, для каждого состояния стабильного висения, следующие i-е параметры в момент времени ti и на высоте h(ti):
и
где:
 - стандартная температура на уровне моря;
- стандартная температура на уровне моря;
p0 - стандартное давление на уровне моря;
R - универсальная постоянная идеального газа; и
g - ускорение свободного падения.
Каскад 20 регистрации также регистрирует, на основе параметров δ(ti) и Ψ(ti), параметр σ(ti) в момент времени ti и на высоте h(ti):
где:
ρ0 - стандартная плотность на уровне моря.
На характеристических кривых 100, 101, 102, 103, 104 (фиг.2 и 3) ось Y показывает параметр:
в момент времени ti и на высоте h(ti); а
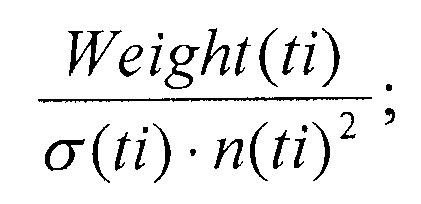
ось X - параметр:
в момент времени ti и на высоте h(ti), и при этом Weight(ti) - вес вертолета 1 в момент времени ti, полученный из характеристических кривых 100, 101, 102, 103, 104.
Характеристические кривые 100, 101, 102, 103, 104 начерчены для увеличивающихся высот h(ti) висения. Другими словами, характеристическая кривая 100 (101, 102, 103) начерчена для более низкой высоты h(i) висения, чем характеристическая кривая 101 (102, 103, 104).
Каскад 20 регистрации предназначен для интерполяции характеристической кривой 106 (фиг.3) на высоте h(ti) в случае, если таковая не совпадает с высотами, на которых начерчены характеристические кривые 100, 101, 102, 103. На фиг.3 характеристическая кривая 106 интерполируется на высоте h(ti) между высотами характеристических кривых 100 и 101.
Каскад 20 регистрации предназначен для расчета каждого значения W(t1), W(t2), W(t3),..., W(ti),..., W(tn) в соответственный момент времени ti согласно уравнению:
где поправочные значения C(t1), C(t2), C(ti),... C(tn) являются суммой:
- соответственных первых слагаемых, связанных с расходом топлива вплоть до момента времени t0, t1,..., ti,..., tn; и
- соответственных введенных экипажем вторых слагаемых, связанных с изменениями веса, например, в результате погрузки или выгрузки материала на и с вертолета 1.
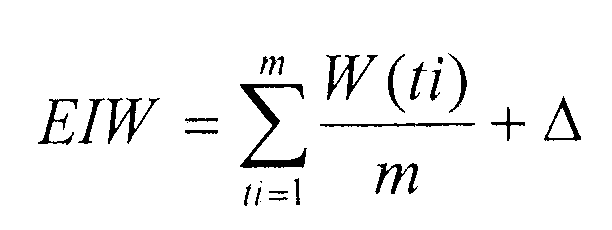
Каскад 25 расчета предназначен для расчета веса EIW вертолета 1 согласно уравнению:
где:
∆ - значение надежности, прибавляемое к расчетному весу EIW вертолета 1.
Другими словами, каскад 25 расчета предназначен для расчета веса EIW вертолета в качестве суммы среднего арифметического значений W(ti) и значения ∆ надежности.
Каскад 20 регистрации предпочтительно предназначен для определения неисправности, когда в данный момент времени ti+1:
Другими словами, каскад 25 расчета предназначен для определения неисправности, когда разница между двумя следующими друг за другом значениями W(ti), W(ti+1), зарегистрированными в моменты времени ti и ti+1, превышает значение ∆ надежности.
В этом случае, каскад 25 расчета отправляет сигнал неисправности в блок технического обслуживания системы 10 и/или удаляет значения W(ti+1, ti+2, …) из расчета веса EIW.
Каскады 20, 25, 35 регистрации, расчета и распознавания предпочтительно расположены на наземной станции 19, а каскад 30 сбора данных расположен на вертолете 1.
Полетные параметры, полученные каскадом 30 сбора данных, загружаются в каскад 25 расчета, например, посредством кассеты переноса данных.
Каскады 20, 25, 30, 35 регистрации, расчета, сбора данных и распознавания управляются программным обеспечением, загруженным и приведенным в исполнение системой 10.
В практическом использовании, полетные параметры получаются каскадом 30 сбора данных на заданной частоте выборки и загружаются в каскад 35 распознавания наземного базирования, который определяет, находится ли вертолет 1 на висении.
Более точно, каскад 35 распознавания определяет стабильное висение вертолета 1, когда по меньшей мере на всем протяжении интервала ∆t:
- угол крена находится ниже порогового значения, например в десять градусов;
- угол тангажа находится ниже порогового значения, например в десять градусов;
- вертикальная скорость ниже порогового значения, например 50 футов в минуту;
- измеренная радаром высота находится между нижним пороговым значением и верхним пороговым значением, например 5 и 100 футами;
- истинная скорость полета вертолета 1 ниже 10 узлов.
Для каждых момента времени ti и высоты h(ti), при которых каскад 35 распознавания определяет состояние стабильного висения, каскад 20 регистрации регистрирует значение W(ti) веса вертолета 1.
Более точно, на основе i-х значений высоты PALT(ti) по давлению и температуры TOUT(ti) на высоте h(ti) и в момент времени t(i), каскад 20 регистрации регистрирует параметры:
и
Далее, каскад 20 регистрации регистрирует параметр:
В этой точке, при заданных параметрах σ(ti), n(ti), значении Power(ti) отбора мощности и высоте h(ti), значение Weight(ti) веса может получаться из характеристических кривых 100, 101, 102, 103, 104 на фиг.2 и 3.
Каскад 20 регистрации вносит поправки в значение Weight(ti), применяя поправочные значения C(ti), связанные с расходом топлива между моментами времени ti-1 и t, операции загрузки/выгрузки материала, согласно уравнению

Значение W(ti), связанное с высотой h(ti) и моментом времени ti, отправляется в каскад 25 расчета.
Каскад 25 расчета, таким образом, принимает некоторое количество значений W(t1), W(t2), W(t3),..., W(ti),..., W(tn), связанных со значениями веса, зарегистрированными в соответственные моменты времени t1, t2, t3,..., ti,..., tn и на соответственных высотах h(t1), h(t2), h(t3),..., h(ti), h(tn).
Каскад 25 расчета рассчитывает взлетный вес EIW вертолета 1, принимая во внимание значение ∆ надежности. Более точно, взлетный вес EIW рассчитывается согласно уравнению:
Каскад 25 расчета вырабатывает сигнал, указывающий неисправность системы 10, когда в момент времени t(i+1):

В этом случае, каскад 25 расчета не учитывает значения W(ti+2), W(ti+3),..., W(tn) при расчете взлетного веса EIW вертолета 1.
Преимущества способа и системы 10 согласно настоящему изобретению будут ясны из вышеприведенного описания.
В частности, способ и система 10 согласно настоящему изобретению дает возможность расчета взлетного веса EIW вертолета 1 во время эксплуатации вертолета 1.
Взлетный вес EIW, таким образом, может эффективно использоваться, особенно в сочетании со значимой индикацией полетных маневров, фактически выполняемых вертолетом 1, для оценки фактической усталости и отсюда фактического остаточного срока службы наиболее важных составляющих деталей вертолета 1.
Более того, способ и система 10 согласно изобретению предусматривают легкое измерение фактического взлетного веса вертолета 1, без необходимости в бортовых датчиках нагрузки.
В заключение, еще один важный момент, на который нужно обратить внимание, состоит в том, что, в режиме стабильного висения, мощность Power(ti), необходимая для полета, по существу используется для подъема веса вертолета 1.
Характеристические кривые 100, 101, 102, 103, 104 поэтому легки для вычерчивания и обычно показаны в руководстве по эксплуатации вертолета 1.
Посредством применения измерения мощности Power(ti), отбираемой в режиме стабильного висения на высоте h(ti), способ согласно изобретению чрезвычайно легок для реализации с использованием характеристических кривых 100, 101, 102, 103, 104.
Ясно, что изменения могут быть произведены в отношении способа и системы 1, как описанные в материалах настоящей заявки, однако, не выходя из объема настоящего изобретения.
В заключение, летательный аппарат может быть конвертопланом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МЕТОД КОНТРОЛЯ ОБЩЕЙ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2021 |
|
RU2778700C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ВЫПОЛНЕННОГО С ВОЗМОЖНОСТЬЮ ВИСЕНИЯ | 2010 |
|
RU2529573C2 |
| СКОРОСТНОЙ СВЕРХМАНЕВРЕННЫЙ ВИНТОКРЫЛ | 2012 |
|
RU2480379C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ВЕРТОЛЕТА | 2013 |
|
RU2543111C1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АГРЕГАТОВ НЕСУЩЕЙ СИСТЕМЫ ВЕРТОЛЕТА ДЛЯ ПРОДЛЕНИЯ РЕСУРСА | 2001 |
|
RU2181334C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ В ПОЛЕТЕ ИЗГИБНЫХ НАПРЯЖЕНИЙ НА ВАЛУ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА С ТОРСИОННОЙ ВТУЛКОЙ НЕСУЩЕГО ВИНТА | 2016 |
|
RU2631557C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2022 |
|
RU2797468C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ И УПРАВЛЕНИЯ ЭНЕРГИЕЙ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ГИБРИДНОЙ СИСТЕМОЙ ПРИВОДА ВИНТА | 2018 |
|
RU2694695C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
Изобретение относится к области авиации, в частности к способам и системам расчета взлетного веса летательных аппаратов. Способ расчета взлетного веса летательного аппарата, выполненного с возможностью висения, содержит этапы, на которых регистрируют необходимую мощность висения в первый и второй момент времени, получают третьи значения второй величины, связанной с давлением на высоте полета, получают четвертые значения третьей величины, связанной с температурой на высоте полета, получают пятые значения четвертой величины, связанной с частотой вращения двигателя, рассчитывают шестые значения пятой величины, связанной с относительной плотностью на высоте полета в упомянутые первый и второй моменты времени. Используют характеристическую кривую висения для расчета седьмого и восьмого значений полетного веса летательного аппарата в первый и второй момент времени. Достигается возможность точного расчета взлетного веса. 2 н. и 8 з.п. ф-лы, 3 ил.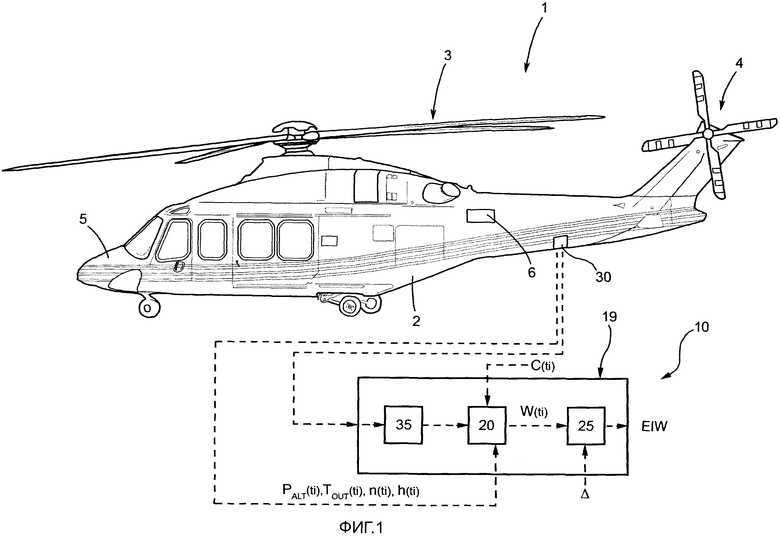
1. Способ расчета взлетного веса (EIW) летательного аппарата, выполненного с возможностью висения, отличающийся тем, что содержит этапы, на которых:
- регистрируют по меньшей мере одно первое и одно второе значение (W(t1), W(t2), W(t3), W(ti), ..., W(tn)) первой величины, связанной с взлетным весом упомянутого летательного аппарата в по меньшей мере один первый момент времени и второй момент времени, в которые упомянутый летательный аппарат находится в состоянии стабильного висения; и
- рассчитывают взлетный вес упомянутого летательного аппарата на основе упомянутых первого и второго значений;
упомянутый этап регистрации содержит этапы, на которых:
- регистрируют необходимую мощность (Power (t1), Power (t2), Power (t3), ..., Power (ti), Power(tn)) висения в упомянутые первый и второй момент времени; и
- получают третьи значения второй величины, связанной с давлением на высоте полета в упомянутые первый и второй момент времени;
- получают четвертые значения третьей величины, связанной с температурой на высоте полета в упомянутые первый и второй момент времени;
- получают пятые значения (n(t1), n(t2), ..., n(ti), ..., n(tn)) четвертой величины, связанной с частотой вращения двигателя упомянутого летательного аппарата в упомянутые первый и второй момент времени;
- рассчитывают, на основе упомянутых третьего, четвертого и пятого значений, шестые значения (σ(t1), σ(t2), ..., σ(ti), ..., σ(tn)) пятой величины, связанной с относительной плотностью на высоте полета в упомянутые первый и второй моменты времени;
- используют характеристическую кривую висения для расчета седьмого и восьмого значений полетного веса (Weight(t1), Weight(t2), Weight(t3), ..., Weight(ti), ..., Weight(tn)) упомянутого летательного аппарата в упомянутые первый и второй момент времени;
упомянутая характеристическая кривая показывает закономерность первого параметра, связанного с упомянутой необходимой мощностью висения, в зависимости от второго параметра, связанного с упомянутым полетным весом упомянутого летательного аппарата;
упомянутый первый параметр имеет значение:
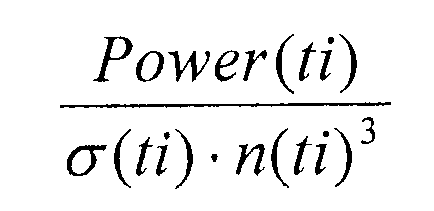
где значения σ(ti) - упомянутые шестые значения, а
n(ti) - упомянутые пятые значения;
упомянутый второй параметр имеет значение:
упомянутый этап регистрации дополнительно содержит этапы, на которых:
- вносят поправку в упомянутые седьмое и восьмое значения полетных весов в упомянутые первый и второй момент времени первым и вторым поправочными значениями (C(t1), C(t2), C(t3), ..., C(ti), C(tn)), согласно формуле:

где W(t1), W(t2), ... W(ti), ..., W(tn) - упомянутые первое и второе значения;
упомянутые первое и второе поправочные значения содержат по меньшей мере одно первое слагаемое, связанное с расходом топлива упомянутого летательного аппарата вплоть до первого момента времени и второго момента времени;
упомянутый этап расчета дополнительно содержит этап, на котором рассчитывают упомянутый взлетный вес согласно уравнению:
где ∆ - значение надежности.
2. Способ по п.1, отличающийся тем, что упомянутый этап регистрации содержит подэтапы, на которых:
- регистрируют упомянутое первое значение упомянутой первой величины на первой высоте; и
- регистрируют упомянутое второе значение упомянутой первой величины на второй высоте, отличной от упомянутой первой высоты.
3. Способ по п.1 или 2, отличающийся тем, что содержит этапы, на которых:
- получают некоторые количество полетных параметров;
- идентифицируют состояние стабильного горизонтального полета упомянутого летательного аппарата на основе упомянутых полетных параметров; и
- выполняют упомянутый этап регистрации, если упомянутый летательный аппарат находится в состоянии стабильного горизонтального полета.
4. Способ по п.1 или 2, отличающийся тем, что упомянутое количество полетных параметров содержит угол крена, угол тангажа, вертикальную скорость, измеренную радаром высоту и истинную скорость полета упомянутого летательного аппарата;
упомянутый этап идентификации содержит этап, на котором определяют, что в течение по меньшей мере заданного временного интервала:
- упомянутый угол крена находится ниже соответственного порогового значения;
- упомянутый угол тангажа находится ниже соответственного порогового значения;
- упомянутая вертикальная скорость находится ниже соответственного порогового значения;
- упомянутая измеренная радаром высота находится между соответственными пороговыми значениями; и
- упомянутая истинная скорость полета находится ниже соответственного порогового значения.
5. Способ по п.1 или 2, отличающийся тем, что содержит этап, на котором загружают полученные упомянутые полетные параметры в наземную станцию; и тем, что по меньшей мере один из упомянутых этапов идентификации/регистрации/расчета выполняют на упомянутой наземной станции.
6. Способ по п.1 или 2, отличающийся тем, что упомянутое первое поправочное значение содержит второе слагаемое, введенное пользователем на упомянутом летательном аппарате и связанное с изменением веса, независящим от упомянутого расхода топлива.
7. Способ по п.1 или 2, отличающийся тем, что упомянутый этап регистрации содержит этап, состоящий в том, что формируют сигнал неисправности, когда разница между упомянутым первым и вторым значением, зарегистрированными в следующие друг за другом соответственные упомянутые первый и второй моменты времени, превышает дополнительное пороговое значение.
8. Система для расчета взлетного веса (EIW) летательного аппарата, выполненного с возможностью висения, система отличается тем, что содержит:
- каскад регистрации для регистрации по меньшей мере одного первого и второго значения (W(t1), W(t2), W(t3), W(ti), …, W(tn)) величины, связанной с взлетным весом упомянутого летательного аппарата в по меньшей мере один первый и второй момент времени, в который упомянутый летательный аппарат находится в состоянии стабильного висения; и
- каскад расчета для расчета взлетного веса упомянутого летательного аппарата на основе упомянутых первого и второго значений;
упомянутый каскад регистрации является предназначенным для регистрации первого и второго значений полетного веса (Weight(t1), Weight(t2), Weight(t3), …, Weight(ti), …, Weight(tn)) на основе:
- необходимой мощности (Power(t1), Power(t2), Power(t3), …, Power(ti), …, Power(tn)) висения в упомянутый первый и второй момент времени;
- третьих значений второй величины, связанной с давлением на высоте полета в упомянутые первый и второй момент времени;
- четвертых значений третьей величины, связанной с температурой на высоте полета в упомянутые первый и второй момент времени;
- пятых значений (n(t1), n(t2), …, n(ti), …, n(tn)) четвертой величины, связанной с частотой вращения двигателя упомянутого летательного аппарата в упомянутые первый и второй момент времени; и
- некоторого количества характеристических кривых, показывающих закономерность первого параметра, связанного с упомянутой необходимой мощностью висения, в зависимости от второго параметра, связанного с упомянутым полетным весом упомянутого летательного аппарата;
упомянутый первый параметр имеет значение:
где значения σ(ti) - упомянутые шестые значения, а n(ti) - упомянутые пятые значения; упомянутый второй параметр имеет значение:
упомянутый каскад регистрации является предназначенным для внесения поправки в упомянутые первое и второе значения упомянутого полетного веса в упомянутые первый и второй момент времени первым и вторым поправочными значениями (C(t1), C(t2), C(t3), …, C(ti), …, C(tn)) согласно формуле:

где W(t1), W(t2), … W(ti), …, W(tn) - упомянутые первое и второе значения;
упомянутые первое и второе поправочные значения содержат по меньшей мере одно первое слагаемое, связанное с расходом топлива упомянутого летательного аппарата вплоть до первого момента времени и второго момента времени;
упомянутый каскад расчета является предназначенным для расчета упомянутого взлетного веса согласно уравнению:
где ∆ - значение надежности.
9. Система по п. 8, отличающаяся тем, что содержит каскад сбора данных для получения полетных параметров упомянутого летательного аппарата;
упомянутый каскад расчета является предназначенным также для расчета взлетного веса на основе упомянутых полетных параметров;
упомянутая система дополнительно содержит каскад распознавания полетных условий, предназначенный для определения, на основе полученных полетных параметров, находится или нет упомянутый летательный аппарат в стабильном горизонтальном полете.
10. Система по любому одному из пп. 8 или 9, отличающаяся тем, что упомянутый каскад расчета и/или упомянутый каскад регистрации являются наземными.
| US 5229956 A, 20.07.1993 | |||
| US 3469644 A, 30.09.1969 | |||
| US 4490802 A, 25.12.1984 | |||
| US 2004193386 A1, 30.09.2004. |

