Изобретение относится к области авиационной техники и касается создания скоростных комбинированных вертолетов и преобразуемых винтокрылов с поворотными несущими винтами, применяющих технологии вертикального взлета и посадки или короткого взлета и посадки, а также короткого взлета и вертикальной посадки для наземного, корабельного или аэродромного, но и палубного базирования.
Известен скоростной вертолет мод. Sikorsky S-97 «Raider» (США), выполненный по двухвинтовой соосной схеме с соосными несущими и задним толкающим винтами (технология Х2), который имеет силовую установку с двумя газотурбинными двигателями, передающими крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущие соосные и задний толкающий винты, последний из которых установлен на конце хвостовой балки за вертикальным двухкилевым оперением, смонтированным на консолях горизонтального оперения, трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие хвостового оперения, двух газотурбинных двигателей, главного редуктора и валов трансмиссии, передающих мощность четырехлопастным соосным несущим и шестилопастному толкающему винтам, обеспечивающими как перемещение вверх-вниз, вперед-назад, влево-вправо, так и его поступательный горизонтальный полет. Вращение несущих соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность силовой установки, позволяющая при непродолжительном времени висения достигать полезной нагрузки 2200 кг при взлетном его весе 12 т. Скоростной вертолет мод. Sikorsky S-97, имея крейсерские скорости полета до 463 км/ч, дальность полета до 1300 км и практический потолок 7600 м, может применяться при транспортно-десантных операциях.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем двухвинтовой соосной схемы и с задним толкающим винтом, используемым только на крейсерских режимах полета, имеет большой объем регламентных работ, малую весовую отдачу и радиус действия; вторая - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования; третья - это то, что соосное расположение винтов создает вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования; четвертая - это то, что в вертолете двухвинтовой соосной схемы с полужестким креплением лопастей имеет место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту. Все это и ограничивает возможность дальнейшего повышения скороподъемности, а также скорости и дальности полета, но и показателей транспортной и топливной эффективности.
Известен скоростной винтокрыл мод. Lockheed АН-56 «Cheyenne» (США), выполненный по одновинтовой схеме с четырехлопастными несущим и рулевым винтами, который имеет силовую установку, включающую один газотурбинный двигатель, передающий крутящий момент через главный редуктор и систему соединительных валов трансмиссии как на несущий винт и на конце горизонтального оперения хвостовой рулевой винт, так и на конце хвостовой балки трехлопастной толкающий винт, вертикальное оперение, смонтированное под хвостовой балкой, оснащенное на конце килевой его поверхности амортизационной стойкой заднего колеса трехопорного колесного шасси, снабженного и главными боковыми опорами с передними колесами, убирающимися в боковые обтекатели низкорасположенного крыла умеренного размаха.
Признаки, совпадающие - наличие крыла, хвостового оперения и одного газотурбинного двигателя мощностью 3435 л.с., главного редуктора и валов трансмиссии, передающих мощность как четырехлопастным несущему (D=15,56 м) и рулевому (d=3,04 м) винтам, так и толкающему винту (d=3,04 м), обеспечивающими соответственно как перемещение вверх-вниз, вперед-назад, влево-вправо, так и его поступательный горизонтальный полет. Несущий винт предназначен только для создания подъемной силы, поступательное движение в горизонтальной плоскости обеспечивает толкающий винт. Вращение несущего, рулевого и толкающего винтов - синхронизирующее. Взлетная тяговооруженность силовой установки (СУ), позволяющая при продолжительном времени висения иметь целевую нагрузку 1000 кг при взлетном его весе 8006 кг. Скоростной винтокрыл мод. Lockheed AH-56A, имея максимальные скорости полета до 407 км/ч, дальность полета до 1400 км и практический потолок 7925 м, может применяться для эскортирования десантно-транспортных вертолетов.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с рулевым винтом и на конце хвостовой балки с отдельным толкающим винтом, используемым только на крейсерских режимах полета, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, большую массу хвостовой балки и валов трансмиссии, малую весовую отдачу и радиус действия; вторая - это то, что СУ включает один газотурбинный двигатель и тем самым снижает надежность крейсерского полета при его отказе; третья - это то, что в вертолете одновинтовой схемы имеют место непроизводительные средние затраты 12-16% мощности СУ на привод рулевого винта, необходимость длинной хвостовой балки, агрегатов хвостовой трансмиссии и опасность, создаваемая рулевым винтом, смонтированным на конце горизонтального оперения, для наземного персонала; четвертая - это то, что вес рулевого и толкающего винтов вместе с хвостовой балкой и агрегатами трансмиссии составляет до 18% веса пустого винтокрыла и имеет тенденцию к увеличению с ростом взлетного его веса; пятая - это то, что крыло и хвостовое оперение не имеют механизации и поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущего винта с автоматом перекоса и при авторотации последнего не позволяет использовать его для продольно-поперечного управления. Все это ограничивает возможность дальнейшего повышения скорости полета и дальности действия, а также показателей транспортной и топливной эффективности.
Наиболее близким к предлагаемому изобретению является вертолет-самолет-амфибия (Россия) [патент РФ №2310583], выполненный по трехвинтовой ярусной схеме с двумя винтами в поворотных кольцевых каналах на консолях крыла и над ними несущий винт, концы лопастей которого отогнуты в противоположную сторону его вращения, снабжен силовой установкой с двумя газотурбинными двигателями, передающими крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущий и нижние винты на крыле, и имеет на конце хвостовой балки за двухкилевым хвостовым оперением газовые струйные рули путевого и продольного управления, трехопорное убирающееся колесное шасси, с носовой и главными боковыми опорами.
Признаки, совпадающие - наличие на пилоне несущего двухлопастного несущего винта, имеющего S-образную форму в плане, и под ним на консолях высокорасположенного крыла двух поворотных кольцевых каналов, имеющих диапазон поворота от -5° до +95°, снабженных тянущими винтами, создающими горизонтальную и соответствующим их отклонением на угол 90° - вертикальную тягу или наклонную тягу - на угол 30° соответственно при вертикальном взлете и посадке или коротком взлете и посадке с перегрузочным (на 20%) взлетным весом и оснащенных в их центре редукторами винтов. Последние связаны соединительными валами с главным редуктором, приводимым двумя газотурбинными двигателями, которые снабжены газоотводящими системами для газовых струйных рулей путевого и продольного управления, смонтированных на конце хвостовой балки за двухкилевым хвостовым оперением.
Причины, препятствующие поставленной задаче: первая - это то, что ярусное расположение двух винтов в поворотных кольцевых каналах на консолях высокорасположенного крыла и над ними несущего винта предопределяет увеличение его габаритных размеров по высоте, затрудняющих его базирование и эксплуатацию на кораблях. Это также приводит и к уменьшению габаритных размеров поворотных кольцевых каналов, и, как следствие, винты выполнены небольшого диаметра. Поэтому при создании ими вертикальной тяги, образуя малую сметаемую площадь, вызывают значительную нагрузку на нее и большую скорость отбрасываемого воздушного потока от поверхности, ухудшающего взаимовлияние винтов, особенно, при путевой балансировке. Вторая - это то, что винты, смонтированные на консолях высокорасположенного крыла в поворотных кольцевых каналах, имеют близкое расположение их линий вертикальной тяги от центра масс, что осложняет продольную управляемость как на вертолетных, так и на переходных режимах полета. Третья - это то, что газотурбинные двигатели снабжены газовыми рулями путевого и продольного управления. Подобная схема увеличивает сложность и массу конструкции, приводит к необходимости увеличения длины хвостовой балки с газоотводящей удлинительной сопловой трубкой и к взаимовлиянию путевого и продольного управления, приводящие к запаздыванию путевого управления на 0,5-1 секунды по сравнению с управлением рулевым винтом. Кроме того, затраты мощности, требуемой для парирования реактивного момента несущего винта реактивными соплами, составляют 10-17% от мощности, потребной для вращения несущего винта на висении. Все это ограничивает возможность повышения путевой и продольной управляемости и, следовательно, сверхманевренности при висении, а также дальнейшего повышения взлетного веса и полезной нагрузки, дальности полета и показателей транспортной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном вертолете-самолете-амфибии исключения управляемых поверхностей и увеличения полезной нагрузки, повышения взлетного веса и увеличения весовой отдачи, уменьшения потребной мощности на путевую балансировку при висении и улучшения путевой и продольной управляемости, повышения скорости и дальности полета.
Отличительными признаками предлагаемого изобретения от указанного выше известного вертолета-самолета-амфибии, наиболее близкого к нему, являются наличие того, что он выполнен по технологии многорежимных аэродинамической и газодинамической реактивной систем управления балансировкой по тангажу, крену и курсу с компенсацией реактивного крутящего момента, обеспечивающих сверхманевренность, и концепции тандемного расположения тянущих движительно-несущих одновинтовой и двухвинтовой систем, снабжен возможностью преобразования его полетной конфигурации с вертолета трехвинтовой несущей схемы с разновеликими несущими винтами, имеющего в одновинтовой и двухвинтовой системах соответственно передний винт большего диаметра и задние винты меньшего диаметра, в полетную конфигурацию винтокрыла, имеющего раздельные движительно-несущую и движительную соответственно одновинтовую систему и расположенную на конце хвостовой балки - двухвинтовую, и в полетную конфигурацию крылатого автожира, имеющего раздельные движительную систему с задними винтами и несущие системы, включающие соответственно передний несущий винт и крыло, расположенные соответственно в направлении полета спереди и сзади центра масс с обеспечением равновесия соответствующих подъемных сил и моментов от двух несущих систем - переднего винта и плоскостей крыла, но и обратно; поворотные кольцевые каналы двухвинтовой системы, смонтированные с отклонением вверх и по бортам хвостовой баки, имеющие на их выходе горизонтальные аэродинамические поверхности, последние, выполненные в виде стабилизатора с положительным углом поперечного V, снабжены подфюзеляжным килем, имеющим на конце в обтекателе его законцовки амортизационную стойку заднего колеса, образует в поперечной плоскости Y-образное хвостовое оперение, консоли низкорасположенного крыла, расположенные в поперечной плоскости параллельно консолям стабилизатора, имеющие стреловидность по передней кромке, оснащены закрылками, задняя кромка которых в плане размещена перпендикулярно плоскости симметрии, образуя с задней кромкой стреловидных концевых частей крыла соответствующие V-образные изломы, в плане и снабжены обтекателями, имеющими бортовые выступы с отсеками для убирающихся главных стоек шасси, причем отклонение закрылок выполняется автоматически на минимальный и максимальный угол и изменяется соответственно от скорости, высоты полета и на режиме аварийной посадки с авторотирующими винтами, меньшие задние винты, имеющие одинаковое направление вращения между собой и противоположное с большим несущим винтом оснащены независимыми узлами поворота их кольцевых каналов, снабжены в каждом конечном положении поворота возможностью синфазного и дифференциального ускоренного отклонения кольцевых каналов с винтами от их линий вертикальной и горизонтальной тяги соответственно вперед-назад и вверх-вниз, газодинамическая реактивная система, включающаяся автоматически при повороте от линии горизонтальной тяги задних винтов на угол более 20° и использующая выдув газа в горизонтальной плоскости через четыре управляемых сопла-клапана, смонтированных в передних и задних окончаниях продолговатых гондол, расположенных на законцовках крыла и вынесенных за переднюю и заднюю кромки последнего, обеспечивает возможность только попарного синфазного и дифференциального выдува соответственно только с двух передних или с двух задних и только с одной или с другой диагонально расположенной пары, каждый газотурбинный двигатель, имеющий степень сжатия воздуха (πк) не менее 15,0 в статических условиях в его компрессоре высокого давления, который оснащен системами отвода части объема сжатого воздуха и доставки его потока по трубопроводам газовоздушного тракта, проложенного к крылу и в носке каждой его консоли к управляемым соплам-клапанам, при этом для автоматизации и безопасности процесса разгона каждого газотурбинного двигателя в систему его управления включен автомат приемистости, программирующий подачу топлива при разгоне в зависимости от параметров рабочего процесса двигателя либо просто в зависимости от времени необходимого запаздывания, исключающие перегрев деталей газовоздушного тракта, неустойчивую работу компрессора, срыв пламени в камере сгорания из-за переобогащения топливной смеси, каждая лопасть большего несущего винта наряду с изгибом ее конца, выполненного в виде законцовки с передней кромкой прямой переменной стреловидности и отогнутой вниз от ее конца по линии отгиба от дальней точки сопряжения передней кромки до точки сопряжения задней кромки на участке изгиба в плане законцовки, задняя кромка которой образует с задней кромкой лопасти V-образный излом в плане, передний больший и задние меньшие несущие винты, размещенные соответственно в направлении полета спереди и сзади от центра масс, имеют на вертолетных режимах полета расстояния от вертикальных их осей до центра масс соответственно меньшее и большее, величины которых определяются из соотношения: T1×l1=t2×L2, кгс·м, где: Т1 и t2 - вертикальная тяга переднего и задних соответственно большего и меньших несущих винтов, кгс; l1 и L2 - меньшее и большее расстояния от вертикальных осей соответственно большего и меньших несущих винтов до центра масс, м.
Благодаря наличию этих признаков в скоростном винтокрыле обеспечивается возможность преобразования полетной его конфигурации с вертолета трехвинтовой несущей схемы с несущими разновеликими передним и задними винтами в винтокрыл для управления пропульсивной тягой несущего большего винта совместно с двумя задними винтами и подъемной силой несущего винта совместно с крылом и обратно. При вертикальном взлете, посадке и висении парирование остаточного реактивного момента, образуемого от несущих винтов различного диаметра, осуществляется с помощью газодинамических управляемых сопел-клапанов путевого управления, создающих в горизонтальной плоскости реактивную силу, которая уравновешивает реактивный момент. Например, при вращении несущего винта против часовой стрелки при виде сверху парирование обеспечивается выдувом только из двух диагонально расположенных сопел-клапанов, размещенных по полету спереди слева и справа сзади, что создает две противоположно направленные реактивные силы на законцовках крыла и обеспечивает газодинамическое путевое управление. Для этого каждый газотурбинный двигатель СУ снабжен системой для отвода части объема сжатого воздуха к управляемым соплам-клапанам, смонтированным в передних и задних окончаниях продолговатых гондол на крыле. Это позволяет наряду с автоматом перекоса лопастей несущего винта как улучшить продольно-поперечное, так и, исключая конструкцию рулевого винта, улучшить путевое управление, а также снизить аэродинамическое сопротивление и уменьшить длину и массу хвостовой балки, но и достичь на вертолетных режимах полета сверхманевренности, особенно, при совместном использовании дифференциального отклонения винтов в поворотных кольцевых каналах и частичного парирования реактивного момента при балансировке по курсу, но и снизить в 1,8-2,2 раза непроизводительные затраты и достичь уровня до 5-7% мощности СУ. Стабилизатор, имеющий положительный угол поперечного V и на консолях наряду с винтами в поворотных кольцевых каналах, снабжен подфюзеляжным килем, оснащенным в обтекателе законцовки килевой поверхности амортизационной стойкой заднего колеса и образующим в поперечной плоскости Y-образное хвостовое оперение, смонтированное на конце хвостовой балки. Возможно преобразование полетной его конфигурации и с винтокрыла, имеющего в несущей и движительной системах винты с жестким креплением лопастей и гасителем колебаний как передний несущий винт большего диаметра, смонтированный на выходном валу главного редуктора, так и задние меньшие винты в поворотных кольцевых каналах, смонтированных па стабилизаторе, в крылатый автожир с несущими системами - авторотирующим большим винтом и плоскостями крыла, расположенными соответственно в направлении полета спереди и сзади центра масс с обеспечением равновесия соответствующих подъемных сил и моментов несущих переднего винта и плоскостей крыла и с движительной системой - только задними меньшими винтами в поворотных кольцевых каналах. При этом 20% мощности СУ полностью расходуется для привода только задних меньших винтов, что позволяет достичь больших скоростей полета до 480-500 км/ч. Это также позволяет снизить удельный расход топлива и весьма повысить дальность действия, топливную и экономическую эффективность.
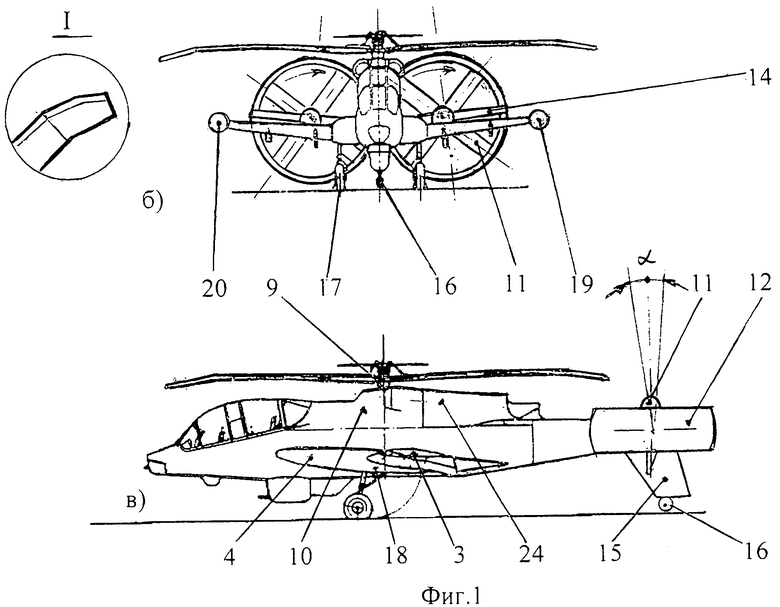
Предлагаемое изобретение скоростного сверхманевренного винтокрыла (ССВК) и варианты возможного его использования в условиях различной полетной конфигурации иллюстрируются общими видами, представленными на фиг.1.
На фиг.1 изображен ССВК на общих видах сверху, спереди и сбоку с расположением винтов в поворотных кольцевых каналах и несущего винта для различных вариантов его использования: а) в полетной конфигурации крылатого автожира с одновинтовой несущей схемой для создания подъемной силы совместно с крылом и маршевой тяги только задними винтами; б) в полетной конфигурации винтокрыла с одновинтовой движительно-несущей системой для создания подъемной и пропульсивной силы совместно с крылом и маршевой тяги задними винтами; в) в полетной конфигурации вертолета трехвинтовой несущей схемы 1+2 с разновеликими передним и задними несущими винтами, размещенными соответственно большего над фюзеляжем и двух меньших в кольцевых каналах - на конце и по бортам хвостовой балки.
Скоростной сверхманевренный винтокрыл, представленный на фиг.1, содержит фюзеляж 1, имеет плавно образованную тонкую хвостовую балку 2 и крыло 3, имеющее положительный угол поперечного V, обтекатели 4 и наивыгоднейший профиль, обеспечивающий необходимый и достаточный прирост подъемной силы с крейсерского полета на переходный и взлетно-посадочный режимы. В носовой части фюзеляжа 1 размещена (например, в ССВК-штурмовике) двухместная кабина 5 экипажа с отдельными кабинами штурмана-оператора и летчика, сиденья которых расположены уступом. Низкорасположенное крыло 3 с углом стреловидности по передней кромке (χ=25°) оснащено только закрылками 6, отклоняющимися вниз на 20° автоматически, в зависимости от скорости и высоты полета. Во время аварийной посадки на режиме авторотации для разгрузки крыла 3 закрылки 6 автоматически отклоняются на 45°.
Стреловидные концевые части 7 крыла 3, выполненные отклоняющимися вверх и складывающимися (наравне с двумя лопастями несущего винта) для удобства размещения на палубе и возможности эксплуатации на кораблях. В трехвинтовой несущей схеме винты с жестким креплением лопастей и гасителем колебаний, как передний больший винт 8, смонтированный на выходном валу, проходящему внутри полого вертикального корпуса 9, главного редуктора расположенного в обтекателе 10, так и задние меньшие винты 11 в поворотных кольцевых каналах 12, имеющих на выходе аэродинамические поверхности 13, выполненные в виде стабилизатора 14. Последний имеет положительный угол поперечного V, снабжен подфюзеляжным килем 15, образующим в поперечной плоскости Y-образное хвостовое оперение, смонтированное на конце хвостовой балки 2. Подфюзеляжный киль 15 оснащен в обтекателе законцовки килевой его поверхности амортизационной стойкой заднего колеса 16, образуя трехопорную схему колесного шасси, имеющего главные колеса 17, убирающиеся в левый и правый обтекатели 4 бортового выступа 18. Газодинамическая реактивная система (ГДРС) имеет четыре управляемых сопла-клапана 19-22, смонтированных в передних и задних окончаниях продолговатых гондол 23, расположенных на законцовках крыла 3 и вынесенных за кромки последнего, выполнена с возможностью обеспечения только попарного синфазного и дифференциального выдува в горизонтальной плоскости соответственно только с двух передних 19-20 (при торможении) или с двух задних 21-22 (при ускорении) и только с одной или с другой диагонально расположенной пары при путевом управлении. Поэтому на вертолетных режимах полета парирование остаточного реактивного момента, образуемого от несущих переднего 8 и задних 11 винтов различного диаметра, обеспечивается выдувом только из двух диагонально расположенных сопел-клапанов 19 и 22. Включение ГДРС производится автоматически при повороте задних винтов на угол более 20°. Имеется согласование совместной работы ГДРС и поворота винтов 11 в кольцевых каналах 12, включая и ускоренное.
Силовая установка, включающая два газотурбинных двигателя (ГТД) 24, расположенные в обтекаемых мотогондолах по обе стороны от плоскости симметрии, выступающих за обводы фюзеляжа 1. Для улучшения взлетно-посадочных характеристик и уменьшения вибрации от четырехлопастного несущих винтов на режиме висения концы лопастей несущего большего винта 8 имеют шумопонижающие стреловидные законцовки, отогнутые вниз и противоположную сторону вращения винтов, формирующие каждую противолежащую пару в S-образную форму в плане (см. фиг.1а). Мощность от ГТД передается несущему 8 и задним винтам 11, посредством системы трансмиссии (на фиг.1 не показаны), связанной с главным редуктором и редукторами винтов 11. Выходной вал первого с несущим винтом 8, смонтированный на выходном валу главного редуктора, а выходные валы вторых редукторов с задними винтами 11 в поворотных кольцевых каналах 12, способных отклоняться в вертикальной плоскости в диапазоне от -6° до +96° совместно со стабилизатором 14 (см. фиг.1а и 1в). Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет, посадку и висение, предопределяет в горизонтальном его полете управление по курсу обеспечивать дифференциальным изменением тяги задних винтов 11 и использовать в ГДРС реактивную тягу задних сопел-клапанов 21-22 в качестве источника пропульсивной тяги крылатого автожира. При этом муфтами сцепления возможно отключение любого избыточного ГТД. В случае отказа двух ГТД возможна его посадка в конфигурации крылатого автожира на режиме авторотации несущих винтов 8 и 11.
Управление ССВК при различных режимах его полета обеспечивается общим (изменяющим силу тяги) и циклическим (изменяющим направление тяги) шагом несущих винтов переднего 8 и задних 11 винтов с жестким креплением лопастей и гасителем колебаний, а также работой газодинамических управляемых сопел-клапанов 19-22 с синфазным и дифференциальным их выдувом, но и синфазным и дифференциальным отклонением в каждом конечном положении поворотных кольцевых каналов 12 с аэродинамическими поверхностями 13, расположенными в зоне активного обдува винтов 11. В полетной конфигурации винтокрыла и крылатого автожира маршевая тяга обеспечивается соответственно несущим винтом 8 совместно с винтами 11 и только винтами 11, а подъемная сила создается только крылом 3 и несущим винтом 8 (см. фиг.1б). На режиме вертикального взлета, посадки и висения несущими винтами передним 8 и задними 11 (см. фиг.1в), на режиме перехода - крылом 3 и несущими винтами передним 8 и задними 11 соответственно большего и меньшего диаметра.
На вертолетных режимах его полета и на режимах вертикального взлета, посадки и висения продольно-поперечное управление осуществляется изменением направления и силы тяги несущего винта 8 автоматом перекоса. Поскольку в такой трехвинтовой несущей схеме полный момент рысканья My образуется в результате взаимодействия горизонтальных составляющих тяги несущих разновеликих винтов, создающих разворачивающий момент, то образуемый при этом остаточный реактивный момент парируется реактивными управляемыми соплами-клапанами 19 и 22 путевого управления, работающими в горизонтальной плоскости. При висении направление полета может осуществляться как у вертолета трехвинтовой несущей схемы, поворачиваясь влево-вправо, перемещаясь вверх-вниз, поступательный полет вперед-назад, влево-вправо и в любой комбинации (см. фиг.1в). С приближением к поверхности земли или палубы корабля и при полете вблизи них на вертолетных режимах полета четырехлопастные несущие больший 8 и меньшие 11 винты образуют под ССВК область уплотненного воздуха, создающего эффект воздушной подушки и тем самым повышающего их КПД. Для соответствующей посадки на поверхность земли или палубы корабля используются колеса 16 и 17 с убирающимися только главными из них.
При полете ССВК с коротким взлетом и посадкой при его максимальном взлетном весе может осуществляться как у комбинированного вертолета, т.е. винтокрыла. В этом случае его тянущие винты 11 в кольцевых каналах 12 поворачиваются вверх на угол 21-30°, а несущий винт 8, изменяя угол установки тарелки автомата перекоса, наклоняет плоскость вращения несущего винта 8, вследствие чего формируется движущая сила, создающая маршевую тягу и подъемную силу, большую подъемной силы, обеспечиваемой крылом 3. При этом 40% мощности СУ полностью расходуется для привода несущего 8 и задних винтов 11. Это позволяет увеличить полезную нагрузку в 1,625 раза и скорость крейсерского полета, так как при высоких скоростях полетная комбинация крыло 3 - тянущие винты 11 гораздо выгоднее для создания подъемной силы и маршевой тяги, чем одним несущим винтом 8. Образуемый при этом остаточный реактивный момент от несущих винтов 8 и 11 парируется управляемым соплом-клапаном 22, работающим в горизонтальной плоскости (см. фиг.1а). После набора высоты горизонтальный полет ССВК при максимальной полезной нагрузке может осуществляться так же, как у крылатого автожира. В этом случае тянущие винты 11 устанавливаются горизонтально и обеспечивают маршевую тягу, а несущий винт 8 отключается от привода двигателей СУ и он начинает авторотировать, создавая только подъемную силу, большую подъемной силы, обеспечиваемой крылом 3. Кроме того, при авторотации срыв потока на лопастях несущего винта отодвигается на более высокие скорости полета, что позволит получить скорости полета 480-500 км/ч.
Таким образом, ССВК, выполненный по концепции тандемного расположения трех винтов в подъемно-несущей и подъемно-маршевой системах соответственно по схеме 1+2, обеспечивающих возможность преобразования его полетной конфигурации, представляет собой комбинированный скоростной вертолет с ГДРС путевого управления. Выбор такой аэродинамической схемы ССВК обусловлен простотой и возможностью преобразования его полетной конфигурации с вертолета трехвинтовой несущей схемы с разновеликими несущими винтами в полетную конфигурацию как винтокрыла, так и крылатого автожира, но и обратно. При этом несущий больший винт в конфигурации вертолета и винтокрыла предназначен для создания подъемной и пропульсивной силы, поступательное же движение в горизонтальной плоскости увеличивается и винтами в поворотных кольцевых каналах. На вертолетных режимах полета такая трехвинтовая несущая схема с ГДРС и задними несущим винтами, обеспечивающими дополнительную подъемную силу, позволяют достичь при вертикальном взлете и посадке (ВВП) непроизводительных затрат до 5-7% мощности СУ, увеличить почти на 12% взлетный вес, а также увеличить полезную нагрузку (ПН) в 1,62 раза. Кроме того, это также позволит уменьшить на 12-17% длину хвостовой балки и сэкономить место взлетной площадки (ВП), что весьма важно при палубном их базировании. Это позволит для палубного ССВК-1,6 весьма улучшить максимальное соотношение ПН к используемой при этом минимальной ВП. Например, в сопоставимых по удельной нагрузке на крыло АН-56А и ССВК-1,6 (см. табл.1) имеют соответственно соотношения ПН/ВП=3,475 кг/м2 и ПН/ВП=6,386 кг/м2, последнее в 1,83 раза эффективнее, чем у скоростного винтокрыла "Lockheed АН-56А".
Очевидно, освоение ССВК с улучшенными тактико-техническими показателями для авиатранспорта в современных условиях - задача многоплановая и не является технически неразрешимой. Поэтому в процессе дальнейшего развития винтокрылой авиации для труднодоступной местности, широко использующей сейчас вертолеты одновинтовой схемы, самой жизнью будет продиктована задача освоения и ССВК, которая достаточно просто и технически реализуема на базе имеющихся вертолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| МНОГОВИНТОВОЙ ТЯЖЕЛЫЙ КОНВЕРТОВИНТОКРЫЛ | 2013 |
|
RU2521121C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| БЕСПИЛОТНЫЙ ВИНТОКРЫЛ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2627963C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям скоростных комбинированных вертолетов. Скоростной сверхманевренный винтокрыл выполнен по трехвинтовой ярусной схеме с двумя винтами в поворотных кольцевых каналах, расположенных на конце хвостовой балки, и несущим винтом, концы лопастей которого отогнуты в противоположную сторону его вращения. Винтокрыл снабжен силовой установкой с двумя газотурбинными двигателями, передающими крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущий и нижние винты, газоструйными рулями путевого и продольного управления, трехопорным шасси. Винтокрыл снабжен возможностью преобразования полетной конфигурации с вертолета трехвинтовой несущей схемы с разновеликими несущими винтами в автожир, имеющий раздельные несущую систему, состоящую из несущего винта и крыла, и движительную систему с задними винтами, и в винтокрыл с движительно-несущей и движительной системами, состоящими соответственно из переднего несущего винта и двух винтов на конце балки. Достигается увеличение весовой отдачи и улучшение путевой и продольной управляемости. 3 ил., 1 табл.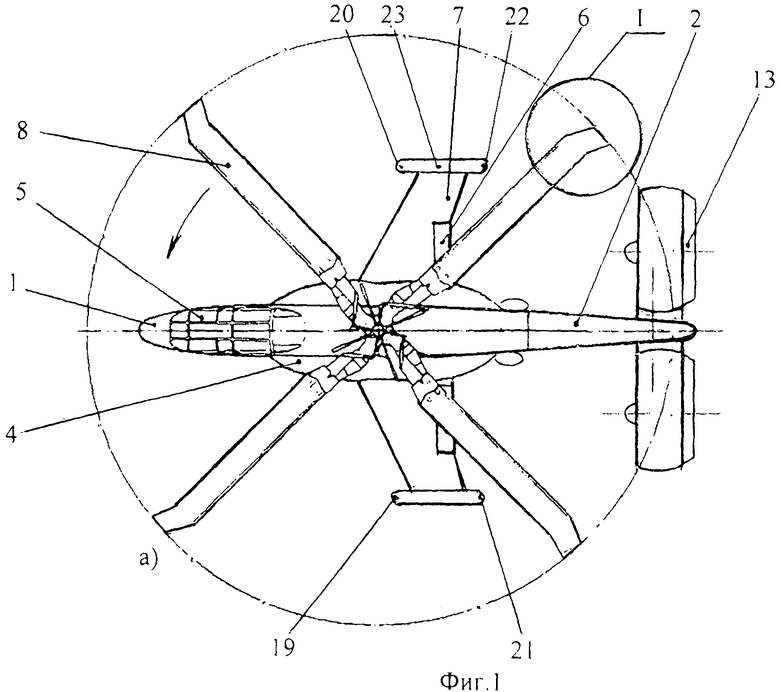
Скоростной сверхманевренный винтокрыл, выполненный по трехвинтовой ярусной схеме с двумя винтами в поворотных кольцевых каналах на консолях крыла и над ними несущий винт, концы лопастей которого отогнуты в противоположную сторону его вращения, снабжен силовой установкой с двумя газотурбинными двигателями, передающими крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущий и нижние винты на крыле, и имеет на конце хвостовой балки за двухкилевым хвостовым оперением газовые струйные рули путевого и продольного управления, трехопорное убирающееся колесное шасси, с носовой и главными боковыми опорами, отличающийся тем, что он выполнен по технологии многорежимных аэродинамической и газодинамической реактивной систем управления балансировкой по тангажу, крену и курсу с компенсацией реактивного крутящего момента, обеспечивающих сверхманевренность, и концепции тандемного расположения тянущих движительно-несущих одновинтовой и двухвинтовой систем, снабжен возможностью преобразования его полетной конфигурации с вертолета трехвинтовой несущей схемы с разновеликими несущими винтами, имеющего в одновинтовой и двухвинтовой системах соответственно передний винт большего диаметра и задние винты меньшего диаметра, в полетную конфигурацию винтокрыла, имеющего раздельные движительно-несущую и движительную соответственно одновинтовую систему и расположенную на конце хвостовой балки двухвинтовую, и в полетную конфигурацию крылатого автожира, имеющего раздельные движительную систему с задними винтами и несущие системы, включающие соответственно передний несущий винт и крыло, расположенные соответственно в направлении полета спереди и сзади центра масс, находящегося в центре равновесия соответствующих подъемных сил и моментов от двух несущих систем - переднего винта и плоскостей крыла, но и обратно; поворотные кольцевые каналы двухвинтовой системы, смонтированные с отклонением вверх и по бортам хвостовой балки, имеющие на их выходе горизонтальные аэродинамические поверхности, последние, выполненные в виде стабилизатора с положительным углом поперечного V, снабжены подфюзеляжным килем, имеющим на конце в обтекателе его законцовки амортизационную стойку заднего колеса, образует в поперечной плоскости Y-образное хвостовое оперение, консоли низкорасположенного крыла, расположенные в поперечной плоскости параллельно консолям стабилизатора, имеющие стреловидность по передней кромке, оснащены закрылками, задняя кромка которых в плане размещена перпендикулярно плоскости симметрии, образуя с задней кромкой стреловидных концевых частей крыла соответствующие V-образные изломы в плане и снабжены обтекателями, имеющими бортовые выступы с отсеками для убирающихся главных стоек шасси, причем отклонение закрылков выполняется автоматически на минимальный и максимальный угол и изменяется соответственно от скорости, высоты полета, и на режиме аварийной посадки с авторотирующими винтами, меньшие задние винты, имеющие одинаковое направление вращения между собой и противоположное с большим несущим винтом оснащены независимыми узлами поворота их кольцевых каналов, снабжены в каждом конечном положении поворота возможностью синфазного и дифференциального ускоренного отклонения кольцевых каналов с винтами от их линий вертикальной и горизонтальной тяги соответственно вперед-назад и вверх-вниз, газодинамическая реактивная система, включающаяся автоматически при повороте от линии горизонтальной тяги задних винтов на угол более 20° и использующая выдув газа в горизонтальной плоскости через четыре управляемых сопла-клапана, смонтированных в передних и задних окончаниях продолговатых гондол, расположенных на законцовках крыла и вынесенных за переднюю и заднюю кромки последнего, обеспечивает возможность только попарного синфазного и дифференциального выдува соответственно только с двух передних или с двух задних и только с одной или с другой диагонально расположенной пары, каждый газотурбинный двигатель, имеющий степень сжатия воздуха (πк) не менее 15,0 в статических условиях в его компрессоре высокого давления, который оснащен системами отвода части объема сжатого воздуха и доставки его потока по трубопроводам газовоздушного тракта, проложенного к крылу и в носке каждой его консоли к управляемым соплам-клапанам, при этом для автоматизации и безопасности процесса разгона каждого газотурбинного двигателя в систему его управления включен автомат приемистости, программирующий подачу топлива при разгоне в зависимости от параметров рабочего процесса двигателя, либо просто в зависимости от времени необходимого запаздывания, исключающие перегрев деталей газовоздушного тракта, неустойчивую работу компрессора, срыв пламени в камере сгорания из-за переобогащения топливной смеси, каждая лопасть большего несущего винта наряду с изгибом ее конца, выполненного в виде законцовки с передней кромкой прямой переменной стреловидности и отогнутой вниз от ее конца по линии отгиба от дальней точки сопряжения передней кромки до точки сопряжения задней кромки на участке изгиба в плане законцовки, задняя кромка которой образует с задней кромкой лопасти V-образный излом в плане, передний больший и задние меньшие несущие винты, размещенные соответственно в направлении полета спереди и сзади от центра масс, имеют на вертолетных режимах полета расстояния от вертикальных их осей до центра масс соответственно меньшее и большее, величины которых определяются из соотношения:
T1×l1=t2×L2, кгс·м,
где T1 и t2 - вертикальная тяга (подъемная сила) переднего и задних соответственно большего и меньших несущих винтов, кгс;
l1 и L2 - меньшее и большее расстояния от вертикальных осей соответственно большего и меньших несущих винтов до центра масс, м.
| ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2005 |
|
RU2310583C2 |
| US 201000308178 A1, 01.06.2009 | |||
| US 20060231677 A1, 19.10.2006 | |||
| Устройство для измерения ускорений | 1956 |
|
SU110715A1 |

