Изобретение относится к весоизмерительной технике и может быть использовано для определения массы груза, поднимаемого вертолетом.
Известен способ и устройство для оценки мгновенной массы винтокрылого летательного аппарата, имеющего силовую установку, приводящую во вращение, по меньшей мере, один несущий винт и противовращающий ротор, а также имеющего множество датчиков. При этом в методе для определения измеренной мгновенной массы самолета используются функциональные, летные и рабочие характеристики самолета (Заявка № US 2017010148 А1, дата приоритета 29.05.2015, дата публикации 28.012020).
Недостатком известного метода оценки мгновенной массы винтокрылого летательного аппарата является необходимость использования множества характеристик, снижающих оперативность оценки.
Известен способ расчета взлетного веса летательного аппарата, выполненного с возможностью висения, содержащий этапы, на которых регистрируют необходимую мощность висения в первый и второй момент времени, получают значения величин, связанных с давлением на высоте полета, с температурой, с частотой вращения двигателя, и используют характеристическую кривую висения для расчета значений полетного веса летательного аппарата в первый и второй момент времени (Патент РФ №2593174 С2, дата приоритета 30.11.2011, дата публикации 27.07.2016, авторы: МАНЧИН Сиро и др., IT).
Недостатком известного способа расчета взлетного веса является его сложность, а также продолжительность способа.
Известен метод контроля массы летательного аппарата вертикального взлета, принятый в качестве прототипа, при котором с помощью закрепленных на фюзеляже устройств формируют сигнал, характеризующий расстояние между фюзеляжем и лопастями, и по нему определяют массу вертолета (Публикация № ЕР 0502811 (А2), МПК G01G 19/07, дата приоритета 06.03.1991, дата публикации 09.09.01992, авторы: DANIELL BLACKBURNE JOHNG и др., US, прототип).
Недостаток прототипа заключается в малой точности, сложности и дороговизне средства измерения, реализующего известный метод.
Технической проблемой, на решение которой направлено изобретение, является оперативное обеспечение возможности контроля общей массы летательного аппарата вертикального взлета в процессе его вертикального полета с грузом.
Сущность изобретения заключается в том, что общая масса летательного аппарата вертикального взлета определяется как произведение массы летательного аппарата вертикального взлета с известной размещенной на его борту массой на отношение суммы вертикального ускорения летательного аппарата вертикального взлета с известной размещенной на его борту массой в заданном интервале высот на конкретном режиме работы двигательно-винтового комплекса летательного аппарата вертикального взлета и ускорения свободного падения к сумме вертикального ускорения летательного аппарата вертикального взлета с неизвестной размещенной на его борту массой в том же заданном интервале высот на том же конкретном режиме работы двигательно-винтового комплекса летательного аппарата вертикального взлета и ускорения свободного падения.
Новизна изобретения состоит в том, что измеряя вертикальное ускорение летательного аппарата вертикального взлета с известной массой при вертикальном взлете в заданном интервале высот с заданным законом управления двигательно-винтовым комплексом и вертикальное ускорение летательного аппарата вертикального взлета с неизвестной массой при вертикальном взлете в заданном интервале высот с заданным законом управления двигательно-винтовым комплексом, определяют неизвестную общую массу летательного аппарата вертикального взлета.
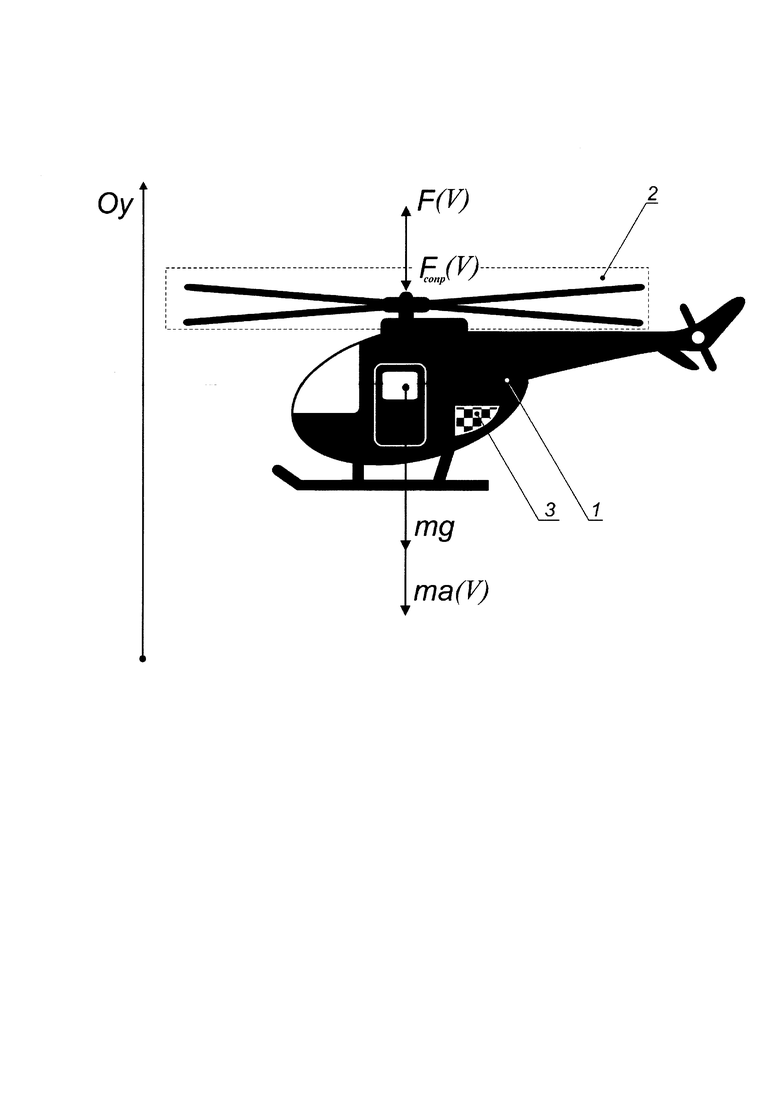
На чертеже изображена схема реализации предлагаемого динамического метода контроля общей массы взлетающего летательного аппарата вертикального взлета.
Летательный аппарат вертикального взлета 1 снабжен двигательно-винтовым комплексом 2 и грузом неизвестной массы 3.
Реализуется предлагаемый динамический метод контроля общей массы взлетающего летательного аппарата вертикального взлета следующим образом.
Двигательно-винтовой комплекс 2 сообщает при подъеме летательному аппарату вертикального взлета 1 в заданном интервале высот и размещенному в его корпусе грузу 3 некоторое ускорение. Обозначим через т массу летательного аппарата вертикального взлета с известной размещенной на его борту массой (например, массой полных баков топлива и массы пилотов), а через mгр обозначим массу неизвестного груза, размещенного в корпусе летательного аппарата вертикального взлета. Тягу двигательно-винтового комплекса в заданном интервале высот при скорости вертикального подъема V обозначим через F(V), а силу сопротивления подъему на скорости V через Fсопр(V).
Пусть на конкретном режиме работы двигательно-винтового комплекса летательный аппарат вертикального взлета массой m при вертикальном взлете в заданном интервале высот при скорости вертикального подъема V испытывает вертикальное ускорение a(V). А при вертикальном взлете вертолет массой m с загруженным в него грузом массой mгр на том же конкретном режиме работы двигательно-винтового комплекса в том же заданном интервале высот при скорости вертикального подъема V испытывает вертикальное ускорение а1(V).
Запишем при вертикальном взлете летательного аппарата вертикального взлета в заданном интервале высот на конкретном режиме работы двигательно-винтового комплекса при скорости вертикального подъема V уравнения движения летательного аппарата вертикального взлета массой m и летательного аппарата вертикального взлета массой m с размещенным в его корпусе грузом неизвестной массы mгр на основе проекции действующих сил на ось Оу:


g - ускорение свободного падения.
Так как при вертикальном взлете в заданном интервале высот при скорости вертикального подъема V режимы работы двигательно-винтового комплекса были одинаковыми (угол наклона лопастей и угол наклона несущего винта не менялся), и, соответственно, тяга двигательно-винтового комплекса F(V) при скорости вертикального подъема V развивалась каждый раз одна и та же.
Приравнивая (1) к (2), определяем неизвестную массу mгр:

Общая масса летательного аппарата вертикального взлета М, взлетающего с грузом неизвестной массы определится:

Предлагаемый динамический метод контроля общей массы летательного аппарата вертикального взлета позволит сигнализировать о превышении допустимой взлетной массы непосредственно при начале набора высоты летательным аппаратом вертикального взлета.
Технический результат заключается в оперативном осуществлении контроля общей массы взлетающего летательного аппарата вертикального взлета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВЯЗНОЙ ВОЗДУШНЫЙ ИМИТАТОР ВЕРТОЛЁТА | 2016 |
|
RU2622583C1 |
| ВИНТОВОЙ СТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ "ВИСТЛА-01" | 2005 |
|
RU2313472C2 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ - НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2317220C1 |
| ПРОТИВОПОЖАРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2483981C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| ГИДРОСАМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И ПНЕВМАТИЧЕСКОЕ ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО | 2020 |
|
RU2755561C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| СРЕДСТВА, СПОСОБ И СИСТЕМА ЗАПУСКА КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ БУКСИРУЕМОГО ПЛАНЕРА (ИХ ВАРИАНТЫ) | 1995 |
|
RU2175933C2 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2403182C1 |
Изобретение относится к области авиации, в частности к способам и системам расчета взлетного веса летательных аппаратов. Способ заключается в том, что общая масса летательного аппарата вертикального взлета определяется как произведение массы летательного аппарата вертикального взлета с известной размещенной на его борту массой на отношение суммы вертикального ускорения летательного аппарата вертикального взлета с известной размещенной на его борту массой в заданном интервале высот на конкретном режиме работы двигательно-винтового комплекса летательного аппарата вертикального взлета и ускорения свободного падения к сумме вертикального ускорения летательного аппарата вертикального взлета с неизвестной размещенной на его борту массой в том же заданном интервале высот на том же конкретном режиме работы двигательно-винтового комплекса летательного аппарата вертикального взлета и ускорения свободного падения. Технический результат заключается в оперативном обеспечении возможности контроля общей массы летательного аппарата вертикального взлета в процессе его вертикального полета с грузом. 1 ил. 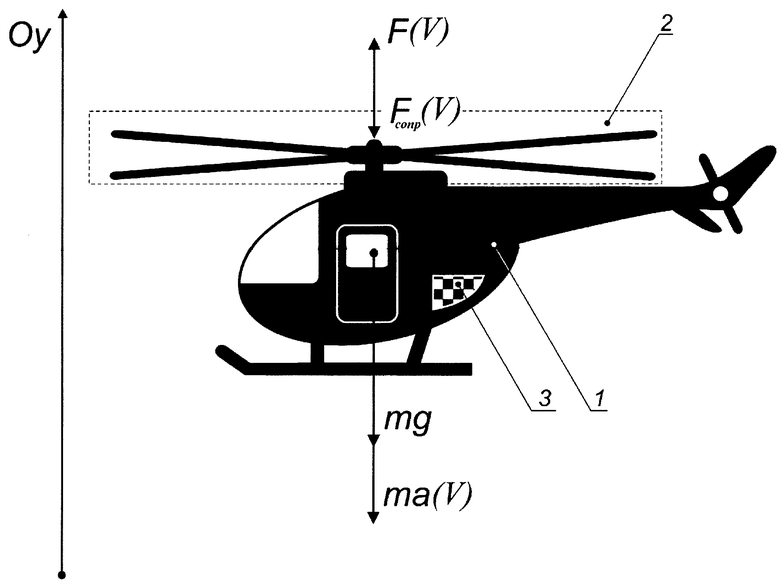
Динамический метод контроля общей массы летательного аппарата вертикального взлета, заключающийся в том, что общая масса летательного аппарата вертикального взлета определяется как произведение массы летательного аппарата вертикального взлета с известной размещенной на его борту массой на отношение суммы вертикального ускорения летательного аппарата вертикального взлета с известной размещенной на его борту массой в заданном интервале высот на конкретном режиме работы двигательно-винтового комплекса летательного аппарата вертикального взлета и ускорения свободного падения к сумме вертикального ускорения летательного аппарата вертикального взлета с неизвестной размещенной на его борту массой в том же заданном интервале высот на том же конкретном режиме работы двигательно-винтового комплекса летательного аппарата вертикального взлета и ускорения свободного падения.
| Пневмовинтовой насос для подачи сыпучих материалов | 1974 |
|
SU502811A1 |
| СПОСОБ И СИСТЕМА РАСЧЕТА ВЗЛЕТНОГО ВЕСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2593174C2 |
| US 2017010148 A1, 12.01.2017. | |||

