ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к авиационной технике и представляет собой летательный аппарат, совмещающий в себе преимущества мультикоптера и автожира.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны автожиры с «прыжковым» взлетом за счет изменения шага несущего (основного) винта (ротора), с раскруткой ротора от вспомогательных двигателей (патент РФ на изобретение № 2673933).
Недостаток известного автожира состоит в том, что для взлета ему требуется взлетно-посадочная полоса либо, если полоса не используется, на раскрутку ротора перед взлетом требуется значительное время. Кроме того, известный автожир характеризуются неустойчивым поведением в момент взлета за счет перекладки вспомогательных двигателей или их отключения во время взлета.
Также известны летательные аппараты трикоптеры, квадрокоптеры, гексакоптеры и мультикоптеры в целом обладающие рядом важных преимуществ по сравнению с другими видами летательных аппаратов (способность к вертикальному взлету и посадке, способность к висению), но имеют серьезный недостаток, заключающийся в том, что при возникновении электрической или механической неисправности высока вероятность падения аппарата с необратимыми последствиями. При этом, падение мультикоптеров (особенно тяжелых) с большой высоты представляет опасность не только для них самих, но и для людей.
Для предотвращения подобных происшествий в квадрокоптерах применяются двигатели значительно большей мощности (2-4 раза) либо увеличивается число движителей, тоже как минимум вдвое от необходимого. Это теоретически позволяет произвести посадку в случае потери четверти подъёмной силы (отказ одного двигателя квадрокоптера). В аварийной ситуации отключают двигатель, расположенный напротив аварийного с выводом на максимум двух исправных двигателей. Однако это приводит к повышенной нагрузке на электрическую и механическую системы, что также может привести к выходу из строя как минимум одного из исправных двигателей.
Также в качестве средств спасения мультикоптеров рассматривается парашют. Однако, использование парашютов для спасения мультикоптеров недостаточно эффективно, поскольку наибольшее число аварийных ситуаций возникает на взлетно-посадочных режимах полета, связанных с малыми высотами и скоростями, не позволяющими воспользоваться парашютами. Также стоит отметить, что парашют является паразитной нагрузкой, ухудшающей летно-технические характеристики (ЛТХ) аппарата.
Описанные выше особенности значительно ограничивают возможность применения мультикоптеров в качестве транспортных средств высокой грузоподъемности (более 50 кг).
Вместе с тем, известно, что автожиры (в отличие как от вертолетов, так и от квадрокоптеров) в меньшей степени подвержены упомянутым недостаткам и способны совершить посадку даже при полной остановке двигателей (потере радиосигнала, разрядке аккумулятора и т.п.). Это обеспечивается за счет того, что основной винт (ротор), приводимый в движение за счет набегающего потока воздуха (в этом состоит отличие автожиров от вертолетов, у которых ротор приводится в движение двигателем), способен вращаться по инерции и под действием набегающего потока, тем самым поддерживая управляемое снижение аппарата, после остановки двигателя. Вместе с тем, автожиры лишены главных достоинств мультикоптеров и не способны к висению длительное время. Способность автожиров к вертикальному взлету и посадке также ограничены.
Поскольку предлагаемое решение относится к области аппаратов обладающих авторотиующим несущим винтом с изменяемым шагом приводим формулу расчета диаметра и таблицу с основными параметрами автожиров с вертикальным (прыжковым) взлетом.
Одним из основных параметров при расчете автожиров является диаметр основного винта. Выбрав нагрузку на основной винт (нагрузку на единицу поверхности ометаемого диска) w (кг/м2) и зная приблизительно взлетную массу автожира, можно определить диаметр основного винта
 ,
,
где G - масса аппарата,
w - нагрузка на единицу поверхности ометаемого диска.
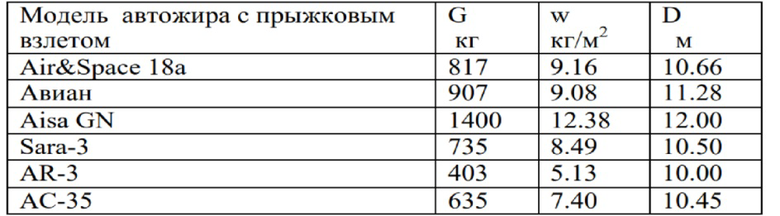
Таблица параметров автожиров
Значения w для автожиров лежат в пределах 7-12 кг/м2.
Для вертолетов значение w значительно выше и может составлять 35-40 кг/м2.
Учитывая, что ротор не является основным и единственным средством взлета и посадки, на летательном аппарате по изобретению предлагается применение высоконагруженного авторотирующего винта с изменяемым шагом в качестве средства спасения квадрокоптера, что позволит значительно уменьшить диаметр основного винта.
При увеличении w до близких к вертолётным 30 получим для аппарата G = 500 кг D = 4,6 м, что вдвое меньше потребного диаметра винта для автожира.
Уменьшение диаметра основного винта в свою очередь приведет к возрастанию максимальной горизонтальной скорости без эффекта заваливания на бок (присуще всем автожирам), за счет увеличения частоты вращения основного винта (ротора).
Уменьшение диаметра авторотирующего несущего винта позволит вписать его габариты в габариты мультикоптера (например, квадрокоптера) позволяя использовать все его преимущества.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача изобретения состоит в создании летательного аппарата, который совмещал бы в себе преимущества мультикоптеров и автожиров.
Технический результат состоит в том, что за счет введения в конструкцию высоконагруженного авторотирующего винта с возможностью поддерживать обороты в режимах полета на малых (околонулевых) скоростях, при которых авторотация невозможна, удается минимизировать последствия выхода из строя движителей мультикоптера, и повысить дальность полета мультикоптера за счет частичной разгрузки двигательной системы в режимах полета с высокой горизонтальной скоростью.
Указанная задача решена благодаря тому, что предлагаемый летательный аппарат содержит:
корпус,
несущий винт, расположенный над корпусом, и
по меньшей мере два поворотных движителя, расположенных снизу от несущего винта, в котором упомянутый несущий винт выполнен авторотирующим с возможностью принудительной раскрутки на низких скоростях горизонтального полета, при взлете, посадке и/или в режиме висения, упомянутые поворотные движители расположены на поворотных опорах с возможностью плавного изменения угла между направлением тяги и вертикалью, упомянутый несущий винт выполнен с возможностью изменения шага, при этом его диаметр подобран таким образом, чтобы обеспечивать нагрузку на единицу ометаемого диска больше 20 кг/м2.
Несущий винт (ротор) предназначен для обеспечения страховки (уменьшения скорости падения) летательного аппарата в случае выхода из строя одного или нескольких несущих движителей. Его конструкция обеспечивает вращение относительно оси за счет набегающего потока воздуха (в режиме авторотации) на высоких скоростях горизонтального полета и одновременно создание аэродинамической подъемной силы, аналогично винтам автожиров.
Количество лопастей основного винта может быть различным, предпочтительно две или одна. В случае двух и более лопастей их параметры (угол атаки и др.) могут регулироваться независимо друг от друга. В случае одной лопасти сложной формы, становится возможным изготовить ее из композитных материалов как единое целое без швов, что может обеспечить снижение веса и повышение прочности.
Летательный аппарат может дополнительно содержать в себе маломощный двигатель, обеспечивающий возможность принудительной раскрутки на низких скоростях горизонтального полета, при взлете, посадке и/или в режиме висения. Альтернативно, основной винт может принудительно раскручиваться от несущих двигателей через систему отбора крутящего момента.
В частном случае для дальних полетов возможно использование в качестве подъемных двигателей не винтовые, а реактивные и или газотурбинные. В этом случае целесообразно применять однолопастный ротор. Взлет в этом случае проводится аналогично тому, как описано в настоящем тексте. После набора горизонтальной скорости и перевода поворотных движителей в режим горизонтальной тяги, производится остановка вращения ротора с фиксацией вдоль продольной оси аппарата и прижатием к корпусу аппарата. Перед посадкой производится расфиксирование и раскрутка ротора с использованием маломощного привода на начальном этапе. После выхода ротора на режим авторотации производится посадка. В этом варианте можно достичь больших скоростей полета с сохранением безопасности при малых скоростях и посадке и взлете.
Вышеупомянутый несущий винт может быть установлен на подвижной балке, выполненной с возможностью изменения расстояния между плоскостью вращения и верхом вышеупомянутого корпуса. Это позволяет повысить безопасность пилотируемых летательных аппаратов: на взлетном поле расстояние увеличивают, чтобы винт случайно не задел пилота или персонал, а также для повышения устойчивости аппарата во взлетно-посадочном режиме, после взлета расстояние уменьшают для улучшения летных характеристик.
Также несущий винт может быть выполнен с возможностью перемещения оси вращения в продольном направлении. Это позволяет при необходимости располагать ось вращения ближе к центру масс летательного аппарата (расположение которого может меняться в зависимости от распределения груза/ веса пилота и т.п.), чтобы сбалансировать нагрузку на несущие движители и улучшить летные характеристики.
Летательный аппарат может быть дополнительно оснащен резервуаром для сжатого рабочего тела (газа, незамерзающей жидкости), а вышеупомянутый основной винт — соплами для истечения рабочего тела, выполненными с возможностью включения в аварийном режиме полета. За счет истечения рабочего тела (газа) из дополнительного резервуара через сопла, расположенные на лопастях ротора можно на некоторое время увеличить число оборотов несущего винта для осуществления посадки, либо экстренного взлета, либо взлета с перегрузом.
Резервуар может быть размещен в любом удобном месте, например, внутри упомянутой подвижной балки или внутри лопастей вышеупомянутого основного винта.
Вышеупомянутый несущий винт может быть выполнен таким образом, чтобы его аэродинамическое качество могло изменяться в зависимости от необходимости, например, лопасти вышеупомянутого несущего винта выполнены телескопическими с возможностью удлинения при возникновении аварийной ситуации.
Для увеличения эффективности несущего винта концы его лопастей могут быть дополнительно снабжены аэродинамическими законцовками.
Поворотные движители летательного аппарата по изобретению расположены и функционируют аналогично несущим винтам мультикоптеров во всех режимах полета: при взлете, посадке, висении, при горизонтальном полете и маневрировании.
Предпочтительно, когда параметры поворотных движителей могут меняться независимо друг от друга, например, предпочтительно, когда поворотные движители выполнены с возможностью плавного изменения силы тяги независимо друг от друга или с возможностью плавного изменения угла между направлением силы тяги и курсом независимо друг от друга. В одной из частных форм выполнения, по меньшей мере, один из вышеупомянутых поворотных движителей может менять направление силы тяги таким образом, чтобы работать фактически в тянущем или толкающем режиме.
Принцип действия поворотных движителей может быть различным, например, вышеупомянутые движители могут представлять собой двигатели с воздушным винтом, реактивные или газотурбинные двигатели.
В случае, когда поворотные движители представляют собой двигатели с воздушным винтом, последний может быть дополнительно защищен экраном из металлической сетки.
Количество поворотных движителей в летательном аппарате может варьировать. Предпочтительно, летательный аппарат содержит от трех до восьми вышеупомянутых движителей. Еще более предпочтительно летательный аппарат содержит две группы поворотных движителей, при этом первая группа расположена ближе к передней части корпуса, а вторая группа – ближе к задней части корпуса.
Хотя предлагаемый летательный аппарат, имеет возможность садиться и взлетать, по существу, вертикально за счет поворотных движителей, тем не менее, он может быть дополнительно оснащен колесными опорами, имеющими привод, обеспечивающими передвижение по земле.
Для снижения сопротивления воздуха, особенно на больших горизонтальных скоростях полета, предпочтительно выполнять корпус летательного аппарата обтекаемой формы. Поворотные опоры, на которых размещены поворотные движители могут быть выполнены в форме укороченных крыльев также для снижения сопротивления и/или для создания аэродинамической подъемной силы.
Предпочтительно, когда вышеупомянутые опоры выполнены с возможностью поворота в широком диапазоне, например, с возможностью поворота от +90 градусов -90 градусов. В этом случае угол атаки между вектором тяги движителей, прикрепленных к опорам и курсом также может меняться в широких пределах и, так чтобы соответственно менять скорость движения летательного аппарата в горизонтальном и вертикальном направлениях.
Летательный аппарат может быть дополнительно оснащен различными элементами оперения, в частности, он может дополнительно содержать горизонтальный и/или вертикальный стабилизатор, и/или рули направления и/или рули высоты.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
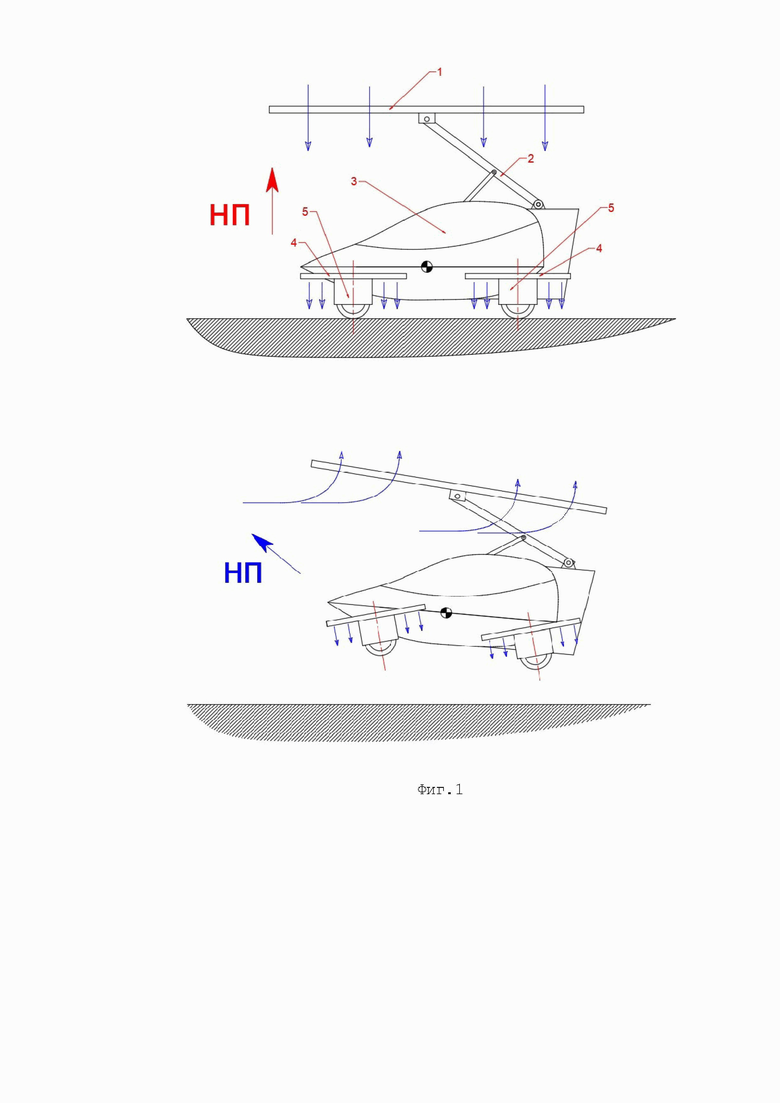
На фиг. 1 схематично показан летательный аппарат, вид сбоку. Сверху показана ориентация основного винта 1 и поворотных винтов 4 перед взлетом, снизу - непосредственно после взлета при низкой или близкой к нулевой горизонтальной скорости полета.
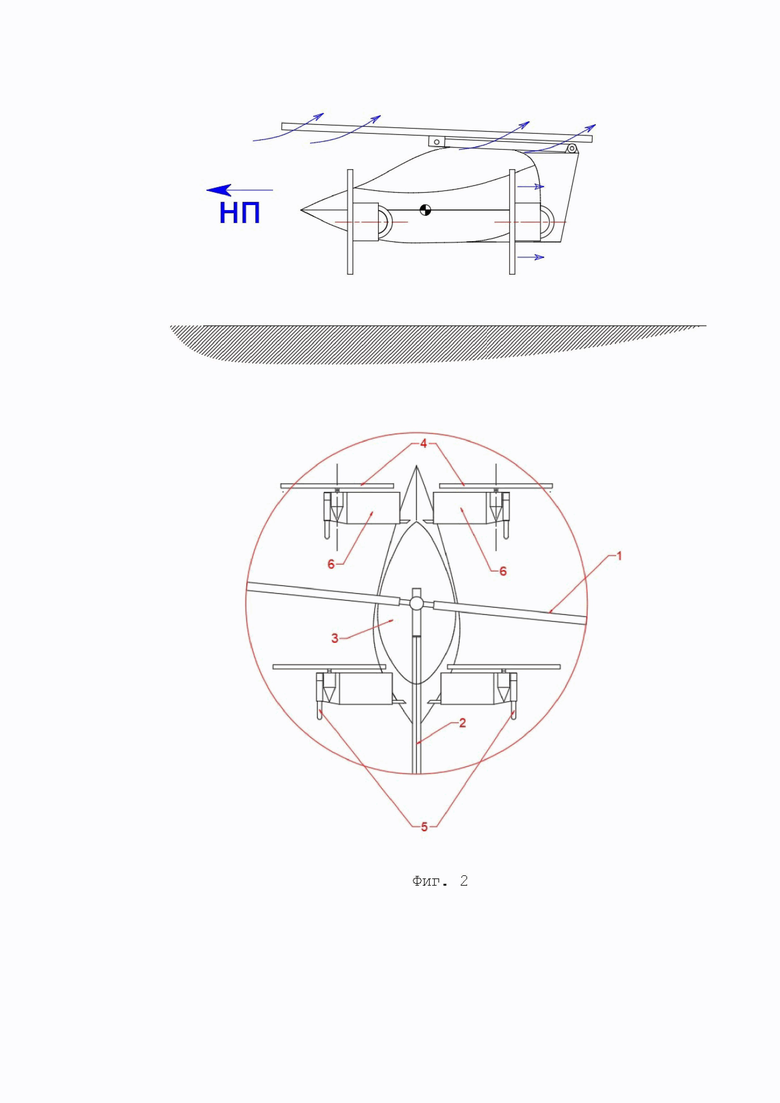
На фиг. 2 схематично показан летательный аппарат, вид сбоку (изображение сверху) и сверху (изображение снизу). Показана ориентация основного винта 1 и поворотных винтов 4 при высокой горизонтальной скорости полета, когда набегающий поток воздуха обеспечивает вращение основного винта 1 в режиме авторотации. Окружностью большого радиуса (изображение снизу) условно показана траектория, которую описывают концы лопастей основноговинта.
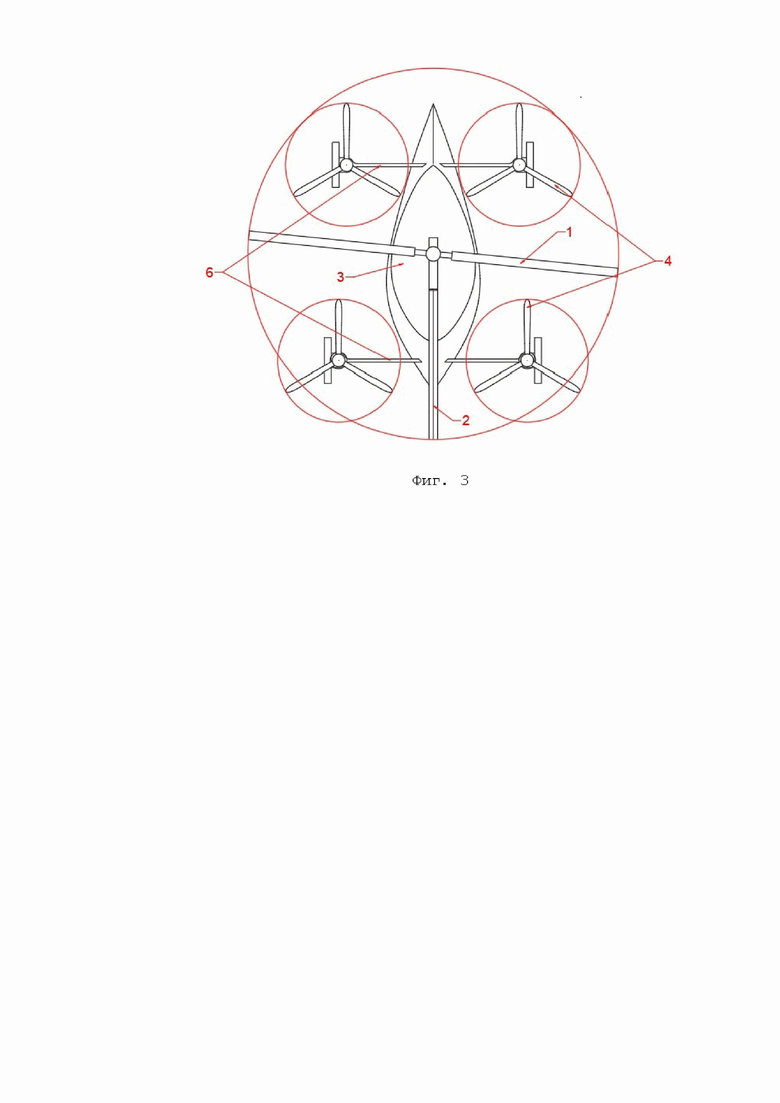
На фиг. 3 схематично показан летательный аппарат сверху. Окружностями показаны траектории, которые описывают концы несущего винта и поворотных винтов.
Позициями 1-6 обозначены следующие элементы:
1 - несущий винт,
2 - подвижная балка,
3 – корпус,
4 - поворотный движитель,
5 – колеса,
6 - поворотные опоры.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Летательный аппарат по изобретению, изображенный на фиг. 1-3 в целом построен на основе квадрокоптера с закрытым обитаемым корпусом - кабиной 3.
Поворотные двигатели квадрокоптера установлены по бокам корпуса на концах поворотных опор 6. Опоры 6 выполнены в виде укороченных крыльев для создания дополнительной подъёмной силы.
Летательный аппарат оснащен мотор-колесами 5 для передвижения по земле.
Несущий винт 1 представляет собой двухлопастный винт. В целях безопасности и для улучшения летных характеристик он соединен с корпусом 3 посредством подвижной балки 2.
Балка 2 позволяет поднимать плоскость вращения несущего винта 1 на безопасную высоту, что обеспечивает посадку высадку экипажа и пассажиров при вращающемся основной винте 1.
Кроме того, балка 2 может быть резервуаром для хранения воздуха под высоким давлением для дополнительной раскрутки основного винта 1 при полном отказе двигательной установки квадрокоптера.
Балка 2, перемещаясь поступательно одновременно меняет свой угол в угломестной плоскости относительно продольной оси аппарата, что позволяет сохранять положение оси несущего винта 1 неподвижным относительно центра масс аппарата. Перед посадкой экипажа производится подъем несущего винта 1 с помощью балки 2 и открытие фонаря.
После фиксации экипажа и пассажиров в креслах и закрытия фонаря производится руление к выбранной точке старта с помощью колес 5.
Руление может осуществляться с опущенным или с поднятым несущим винтом 1 по желанию пилота. Несущий винт 1 в процессе руления неподвижен и зафиксирован.
В частном случае габариты аппарата в положении руления меньше или сопоставимы с габаритами автомобиля руление может осуществляется по дорогам общего пользования.
Прибыв на точку старта, несущий винт 1 выводят в максимально верхнее положение, обеспечивая устойчивость при возникновении аварийной ситуации.
Перед взлетом маломощным вспомогательным двигателем несущий винт раскручивают до примерно 150 % от рабочих оборотов. При этом питание двигателя раскрутки несущего винта 1 может производится от наземного источника питания. 150 % рабочих оборотов гарантируют что аппарат к моменту падения оборотов до 100 % в аварийной ситуации либо наберет достаточную высоту для горизонтального полета, который может быть продолжен на исправных несущих движителях, либо совершит посадку.
В экстренных случаях взлет может производится без раскрутки несущего винта.
До момента взлета лопастям несущего винта 1 придают около нулевые значения угла атаки. При этом подъёмная сила, создаваемая несущим винтом близка к нулю, однако и сопротивление вращению тоже весьма незначительное, что с одной стороны позволяет использовать для раскрутки маломощный привод (например, электромотор), а с другой стороны позволяет «запасти» значительную энергию, которая в аварийной ситуации может быть быстро конвертирована в подъемную силу при увеличении угла атаки
лопастей.
Взлет осуществляют за счет включения двигателей, приводящих во вращение поворотные винты 4, создающие вертикальную подъемную силу.
Взлет происходит, по существу, вертикально до высоты безопасного перехода к горизонтальному полету.
В процессе подъема лопастям несущего винта 1 могут придать положительные углы атаки для увеличения общей подъёмной силы и скороподъемность.
При возникновении аварийной ситуации на влете (например, в случае отказа одного или нескольких поворотных движителей 4) лопастям несущего винта 1 придают положительные углы атаки для компенсации потери подъёмной силы. В случае необходимости задействуется система подачи сжатого воздуха в лопасти несущего винта 1 для поддержания оборотов достаточных для компенсации потери подъемной силы. Пилотом принимается решение о прекращении полета или о продолжении полета в зависимости от размеров потери подъёмной силы на поворотных движителях 4.
В случае возникновения аварийной ситуации на посадке или в горизонтальном полете алгоритм действий аналогичен.
По мере набора высоты поворотные движители 4 на поворотных опорах 6 поворачивают для возникновения горизонтальной составляющей тяги и набора горизонтальной скорости. Аппарат движется с дифферентом на хвост, тем самым обеспечивая авторотацию основного винта. По мере набора скорости дифферент уменьшается, и подъёмная сила на несущем винте 1 увеличивается, позволяя провести дальнейшее изменение угла установки двигателей с переходом их к только горизонтальной тяге. Также, по мере набора скорости балку 2 перемещают с уменьшением до нуля угла между балкой 2 и продольной осью аппарата, что позволяет максимально приблизить плоскость вращения несущего винта к центру масс аппарата. Смещение плоскости вращения несущего винта максимально близко к центру масс и приведении этой плоскости к параллельности с плоскостью движения минимизируют аэродинамическое сопротивление, что позволит повысить ЛТХ.
В крейсерском режиме шаг несущего винта 1 и его подъёмная сила незначительны для уменьшения аэродинамического сопротивления и поддержания высоких оборотов, достаточных для совершения посадки в случае отказа несущих движителей 4.
Посадка, висение и движение с малыми скоростями осуществляется переводом поворотных движителей в положение вертикальной тяги. Одновременно с этим уменьшают угол атаки на лопастях несущего винта 1 для сохранения безопасных (высоких) оборотов позволяющих провести посадку в случае возникновения аварийной ситуации.
При посадке шаг несущего винта 1 управляет подъёмной силой также, как и при взлете, и в случае штатной работы поворотных винтов может оставаться близким к нулю. При возникновении аварийной ситуации в зависимости от высоты и соответственно вертикальной скорости снижения производится перевод шага винта на положительные значения для компенсации потери подъемной силы.
В случае продолжительного висения или движения со скоростью, не обеспечивающей нормальные обороты несущего винта в режиме авторотации возможна подкрутка несущего винта вспомогательным двигателем.
Таким образом, как будет понятно из описания выше, благодаря несущему винту 1 можно практически мгновенно купировать почти любую аварийную ситуацию за счет увеличения угла атаки лопастей несущего винта 1 и, соответственно, подъёмной силы. В то же время в крейсерском режиме несущий винт 1 при минимальном угле атаки лопастей обеспечивает дополнительную аэродинамическую подъемную силу, что позволяет экономить энергию на раскрутку поворотных винтов.
По сравнению с автожирами предлагаемый летательный аппарат обладает следующими преимуществами:
1) возможность вертикального взлета без раскрутки несущего винта в случае экстренной ситуации;
2) меньший диаметр несущего винта позволяющий производить посадку на меньшие площадки;
3) возможность продолжительного висения и движения с малой скоростью без потери высоты;
4) увеличенная скорость в горизонтальном полете.
По сравнению с мультикоптерами предлагаемый летательный аппарат обладает следующими преимуществами:
1) безопасность во всех режимах полета,
2) возможность использования менее мощных двигателей.
3) увеличенная дальность полета.
Кроме того, что при использовании аппаратов, построенных по предлагаемой схеме, появляется возможность придания более аэродинамичной формы корпусу аппарата поскольку движение осуществляется с дифферентом на корму, а не на нос, как на существующих мультикоптерах. Это в свою очередь повышает скорость и дальность полета летательного аппарата по сравнению с мультикоптерами.
Изобретение относится к авиационной технике, в частности к конструкциям летательных аппаратов, совмещающих в себе преимущества мультикоптера и автожира. Летательный аппарат содержит корпус, несущий винт, расположенный над корпусом, и по меньшей мере два поворотных движителя, расположенных снизу от основного винта. Несущий винт выполнен авторотирующим с возможностью принудительной раскрутки на низких скоростях горизонтального полета, при взлете, посадке и/или в режиме висения. Поворотные движители расположены на поворотных опорах с возможностью плавного изменения угла между направлением тяги и вертикалью. Несущий винт выполнен с возможностью изменения шага, при этом его диаметр подобран таким образом, чтобы обеспечивать нагрузку на единицу ометаемого диска больше 20 кг/м2. Поворотные винты выполнены с возможностью обеспечивать необходимую подъемную силу для взлета летательного аппарата. 24 з.п. ф-лы, 3 ил.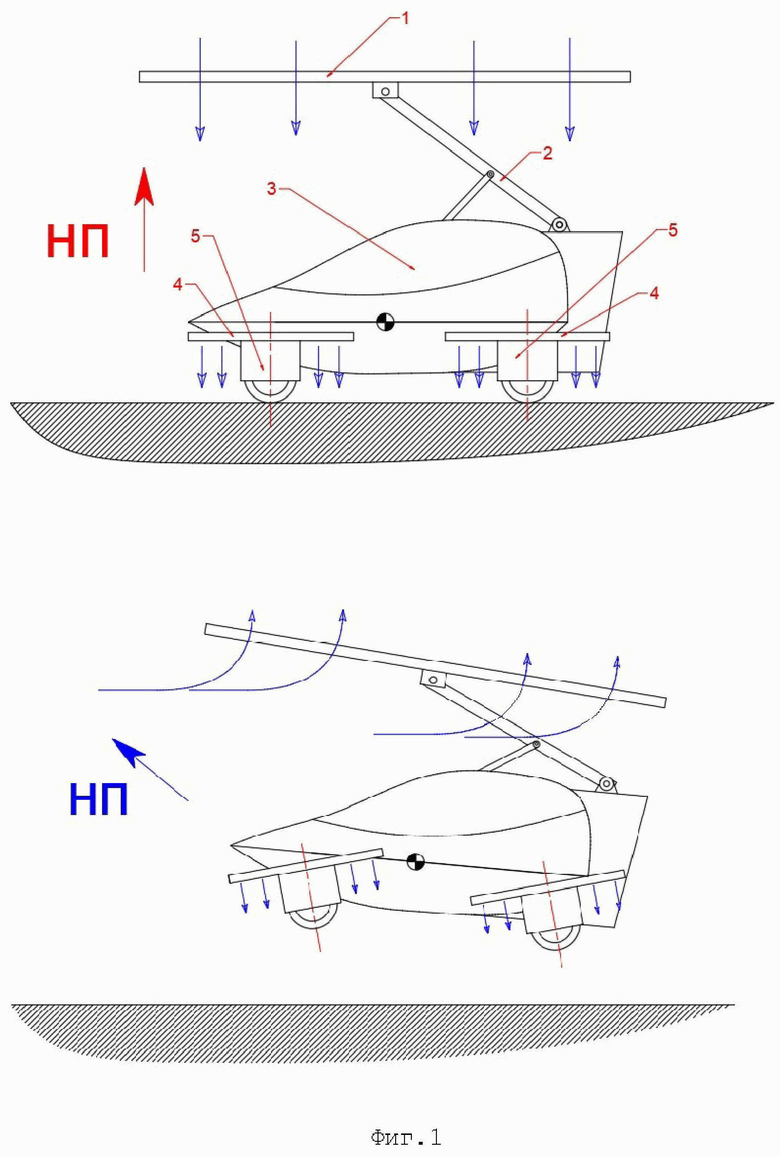
1. Летательный аппарат, содержащий:
корпус,
несущий винт, расположенный над корпусом, и
по меньшей мере два поворотных движителя, расположенных снизу от основного винта, в котором упомянутый несущий винт выполнен авторотирующим с возможностью принудительной раскрутки на низких скоростях горизонтального полета, при взлете, посадке и/или в режиме висения,
упомянутые поворотные движители расположены на поворотных опорах с возможностью плавного изменения угла между направлением тяги и вертикалью,
упомянутые поворотные движители выполнены с возможностью обеспечивать достаточную подъемную силу для взлета,
упомянутый несущий винт выполнен с возможностью изменения шага, при этом его диаметр подобран таким образом, чтобы обеспечивать нагрузку на единицу ометаемого диска больше 20 кг/м2.
2. Летательный аппарат по п. 1, в котором вышеупомянутый несущий винт имеет две лопасти.
3. Летательный аппарат по п. 1, в котором вышеупомянутый несущий винт имеет одну лопасть.
4. Летательный аппарат по п. 1, в котором вышеупомянутый несущий винт установлен на подвижной балке, выполненной с возможностью изменения расстояния между плоскостью вращения и верхом вышеупомянутого корпуса.
5. Летательный аппарат по п. 1, в котором вышеупомянутый несущий винт выполнен с возможностью перемещения оси вращения в продольном направлении.
6. Летательный аппарат по п. 1, характеризующийся тем, что он дополнительно содержит резервуар для рабочего тела под давлением, а вышеупомянутый несущий винт снабжен соплами, при этом резервуар и сопла выполнены с возможностью дополнительной раскрутки несущего винта при возникновении аварийной ситуации за счет реактивного момента от истечения рабочего тела через сопла.
7. Летательный аппарат по п. 6, в котором вышеупомянутый резервуар размещен внутри упомянутой подвижной балки.
8. Летательный аппарат по п. 6, в котором вышеупомянутый резервуар размещен внутри лопастей вышеупомянутого несущего винта.
9. Летательный аппарат по п. 1, характеризующийся тем, что он дополнительно содержит маломощный двигатель, возможностью принудительной раскрутки на низких скоростях горизонтального полета, при взлете, посадке и/или в режиме висения.
10. Летательный аппарат по п. 1, в котором лопасти вышеупомянутого несущего винта выполнены телескопическими с возможностью удлинения и укорочения в продольном направлении.
11. Летательный аппарат по п. 1, в котором лопасти вышеупомянутого несущего винта дополнительно снабжены аэродинамическими законцовками.
12. Летательный аппарат по п. 1, в котором вышеупомянутые поворотные движители выполнены с возможностью плавного изменения силы тяги независимо друг от друга.
13. Летательный аппарат по п. 1, в котором вышеупомянутые поворотные движители выполнены с возможностью плавного изменения угла между направлением силы тяги и курсом независимо друг от друга.
14. Летательный аппарат по п. 1, в котором по меньшей мере один из вышеупомянутых поворотных движителей выполнен с возможностью работы в тянущем или толкающем режиме.
15. Летательный аппарат по п. 1, в котором вышеупомянутые поворотные движители представляют собой двигатели с воздушным винтом.
16. Летательный аппарат по п. 1, в котором вышеупомянутые поворотные движители представляют собой реактивные или газотурбинные двигатели.
17. Летательный аппарат по п. 15, в котором винты упомянутых поворотных движителей защищены посредством экранов из металлической сетки.
18. Летательный аппарат по п. 1, который содержит от трех до восьми вышеупомянутых поворотных движителей.
19. Летательный аппарат по п. 1, который содержит две группы вышеупомянутых поворотных движителей, при этом первая группа поворотных движителей расположена ближе к передней части вышеупомянутого корпуса, а вторая группа – ближе к его задней части.
20. Летательный аппарат по п. 1, характеризующийся тем, что он снабжен колесными опорами, имеющими привод, обеспечивающий передвижение по земле.
21. Летательный аппарат по п. 1, в котором корпус выполнен обтекаемой формы.
22. Летательный аппарат по п. 1, в котором вышеупомянутые поворотные опоры выполнены в виде укороченных крыльев.
23. Летательный аппарат по п. 1, в котором вышеупомянутые поворотные опоры выполнены с возможностью поворота от +90°до -90°.
24. Летательный аппарат по п. 1, характеризующийся тем, что он дополнительно содержит горизонтальный и/или вертикальный стабилизатор.
25. Летательный аппарат по п. 1, характеризующийся тем, что он дополнительно содержит рули направления и/или высоты.
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| Дудник В.В | |||
| "Конструкция вертолетов", Ростов-на-Дону, 2005, с.17, https://studfile.net/preview/5762597/page:2/ | |||
| А.М.Загордан "Элементарная теория вертолета", изд | |||
| МО СССР, Москва, 1955, сс.61,62, https://www.t-library.net/showBook.php?id=169 | |||
| DE 102018109813 A1, 24.10.2019 | |||
| Однолопастный винт | 1990 |
|
SU1821418A1 |
