Область техники, к которой относится изобретение
Настоящее изобретение направлено на способ и систему для того, чтобы определять изменения во времени, по фазе и частоте в станции-повторителе сигналов, расположенной в удаленном и недоступном узле, функционально ассоциированной с набором наземных приемо-передающих баз в известных геодезических позициях, а также для того, чтобы определять временные изменения вследствие распространения сигналов в среде, получать измерения расстояния, навигационное и географическое позиционирование относительно недоступного повторителя и получать временную синхронизацию посредством измерений, скорректированных на предмет изменений по частоте (задержек по фазе) и во времени в удаленном повторителе сигналов. Это предложение предоставляет инновационное решение для удаленного определения изменений во времени и времен перемещения сигнала в способе приема и повторной передачи посредством станций-повторителей или транспондеров, работающих при недоступных условиях, и дополнительных изменений во времени, вызываемых посредством распространения сигнала в передающей среде, в которой работает система.
Предшествующий уровень техники
Эхо-сигнал, полученный из сигнала, отправленного ранее и повторно передаваемого, используется для того, чтобы измерять расстояния до удаленных объектов. Точность определений полностью зависит от сведений и коррекции временных эффектов, которые возникают в повторителе, вызываемых посредством четырех главных факторов: (a) скорость распространения в передающей среде, (b) распространение в кабелях и контрольно-измерительных приборах в ходе передачи, (c) распространение в кабелях и в аппаратуре при конечном приеме и (d) при повторной передаче посредством удаленного объекта (повторителя), расстояние до которого должно быть определено.
Модели, описывающие (a), в общем, известны для распространения в различных средах (земной ионосфере и тропосфере), а также в пространстве (J.W. Marini "Correction of satellite tracking data for the arbitrary tropospheric profile", Radio Sci., 7, 223-231, 1974 год; J.A. Klobuchar "Design and characteristics of the GPS ionospheric time delay algorithm for single frequency users", em PLANS '86 - Position Location and Navigation Symposium, Лас Вегас, штат Невада, 4-7 ноября 1986 года, Record (A87-41351 18-17), New York, Institute of Electrical and Electronics Engineers, стр. 280-286, 1986 год; S.M. Hunt и др. "Equatorial atmospheric and ionospheric modeling at Kwajalein missile range", Lincoln Laboratory Journal, издание 12, стр. 45-64, 2000 год; S.M. Honma, Y. Tamura и M.J. Reid "Tropospheric delay calibrations for VERA", Publ. Astron.Soc. Japan, издание 60, стр. 951-960, 2008 год; T.S. Radovanovic "Adjustment of satellite-based ranging observations for precise positioning and deformation monitoring", PhD dissertation, Department of Geomatics Engineering, University of Calgary, Canada, UCCGR Reports Nr. 20166, 2002 год, и ссылочные материалы из них). После соответствующего выбора модели эффект распространения для временных изменений должен вычисляться как функция от расстояния и угла возвышения, через который наблюдается повторитель, которые являются параметрами, также заранее неизвестными.
Факторы (b) и (c) измеряются непосредственно, экспериментально с высокой точностью.
Тем не менее, фактор (d) является неопределенным, поскольку удаленный объект является недоступным для прямых измерений, и он подвержен изменениям внутренних характеристик распространения сигнала, которые могут изменяться во времени или для каждой последовательности сигналов, используемых для того, чтобы определять его расстояние. Помимо этого другие временные изменения вследствие доплеровских эффектов и временные изменения, прогнозированные посредством относительности, могут становиться важными для повторителей, транспортируемых посредством спутников или космических кораблей, перемещающихся быстро относительно системы координат, содержащей точки, из которых расстояния от удаленного объекта должны становиться определенными. Другие временные изменения могут рассматриваться как вызываемые посредством релятивистских эффектов, когда спутник (удаленный объект) перемещается по другому гравитационному потенциалу относительно геоида (Ashby, N. "Relativity and the global positioning system", Physics Today, 55, стр. 41-47, 2002 год; Larson, K.M. и др. "An assessment of relativistic effects for low Earth orbiters: the GRACE satellites", Metrologia, 44, стр. 484-490, 2007).
С другой стороны, при использовании метеора в качестве отражающих транспондеров, задержки по фазе могут вызываться посредством рассеяния сигнала в ионизированных следах (Wislez J.-M. "Forward Scattering of Radio Waves of Meteor Trails", Proceedings of the International Meteor Conference, Brandenburg, Alemanha, стр. 99-117, 1995 год).
Электромагнитные сигналы, к примеру радиосигналы, могут отправляться на большие расстояния посредством линий передачи. Эти линии связи принимают передачу, обнаруживают ее, усиливают или нет и повторно передают радиосигналы в интересующих направлениях.
Эти технологии являются общеизвестными и общедоступными, и по этой причине они не описываются в данном документе. Удаленная беспроводная передача информации выполняется посредством известных технологий с использованием электромагнитных волн в качестве несущих. Электромагнитные радиоволны наиболее широко используются. В данный момент, беспроводные технологии на основе электромагнитных волн расширяются до полос частот, соответствующих инфракрасному, видимому, ультрафиолетовому и рентгеновскому диапазону.
Линии связи используются для связи на больших расстояниях. Линии связи принимают и повторно передают сигналы на одной частоте или на различных частотах. Линии связи могут быть естественными, такие как отражения электромагнитных радиоволн в земной ионосфере или посредством рассеяния в неоднородностях ионосферы или тропосферы, и посредством отражения в ионизированных метеорных следах в верхних слоях атмосферы, в числе прочего.
Реализовано и используется огромное число вариантов искусственных линий связи, а именно, множество повторителей, ретрансляторов, в общем указанных в качестве транспондеров, установленных на земле или в пространстве, на борту платформы в искусственном спутнике. В ретрансляционных линиях электромагнитные волны испытывают задержки по фазе, вызываемые посредством электронных устройств, через которые распространяется сигнал. Для многих вариантов применения этот эффект не приводит к серьезным последствиям для сигналов, которые транспортируются. Они задерживаются все вместе в течение определенных отрезков времени независимо от пользователя. Это представляет собой случай беспроводных повторных передач аудио и видео.
Тем не менее, в вариантах применения для многосторонней связи, к примеру в мобильных сотовых телефонах, в цифровой связи, требуется синхронизм сигналов в линиях связи. Стандарты опорного времени и частоты должны быть общими и синхронизироваться в каждой линии связи сети беспроводной связи. Использование атомных стандартов частоты и времени в каждой линии связи представляет собой решение. Тем не менее, этот вариант не всегда может быть практичным при том, что, безусловно, он является дорогим.
Современное решение по такой синхронизации линий связи получается посредством стандартов времени, привязанных к GPS-спутникам или к аналогичным созвездиям спутников геопозиционирования. Они известны как GPS-синхросигналы, которые обеспечивают точность и стабильность порядка сотен наносекунд, т.е. на достаточном уровне для того, чтобы гарантировать опорный уровень для электронных схем, работающих в линиях связи (T.A. Clark и R.H. Hambly ""Improving the performance of low cost GPS timing receivers", 38th Annual Precise Time and Time Interval (PTTI) Meeting, Рестон, Вирджиния, США, 7 декабря 2006 года).
Вычисления, требуемые для того, чтобы определять расстояния на основе эхо-сигналов для передаваемых и принимаемых сигналов, обязательно ассоциированы с точными сведениями по задержкам по фазе или временным изменениям, которые возникают в линиях связи, а также по задержкам, вызываемым посредством сред распространения, чтобы получать временные корректировки распространения сигналов, транспортируемых из источника в назначение, проходящих через ретрансляционную линию.
Удаленное определение временных изменений в повторителях и временных изменений вследствие распространения сигнала в средах представляет собой условия, по существу, необходимые для того, чтобы обеспечивать практическую осуществимость использования систем и способов для географического и пространственного позиционирования с использованием опорных передатчиков и приемников на земле и транспондеров в пространстве, как аналитически описано в статье авторов P. L. Kaufmann и др. "Non recursive algorithm for remote geolocation using ranging measurements", Math. Problems in Engineering, v. 2006 год, стр. 1-9, статья ID79389, DOI:10.1155/MPE/2006/79389, 2006 год.
Определение временных изменений в повторителе и изменений вследствие эффектов распространения является важным для того, чтобы обеспечивать практическую осуществимость корректной работы принципов, раскрытых в патенте на изобретение PI9101270-8 "System and process of geographic positioning and navigation", выданном 30 сентября 1997 года, и в его дополнительном свидетельстве C19101270-8, поданном 17.05.2002; в патенте на изобретение PI03003968-4 "System and process of geographic and space positioning", поданном 8 октября 2003 года, соответствующем PCT/BR2004/000190 "Geographic and space positioning system and process", поданному 4 октября 2004 года, что к настоящему моменту привело к следующим выданным патентам: US752877B2, 05.05.09; RU2635934C2 27.08.09; и AU 2004277511, 26.11.2010.
Задержки по фазе, вызываемые посредством компонентов линий связи, преобразователей, кабелей и электронных схем, в передаче и приеме сигналов на земле, могут точно измеряться в лаборатории и приспосабливаться для данных, повторно передаваемых посредством линии связи. Тем не менее, непрерывное использование и удаленное и недоступное местоположение заданной линии связи, например, в спутнике, подвергает риску поддержание заранее определенных задержек и приводит к невозможности их коррекции для обновления. В случае транспондеров в спутниках релятивистские временные эффекты будут зависеть от их позиции в пространстве. В случае повторения посредством повторной передачи в метеорных следах временные эффекты будут зависеть от направления, в котором они возникают в небе. С другой стороны, множество транспондеров содержат внутренние процессоры, которые приводят к запаздываниям сигнала, которые могут быть различными для каждой последовательности повторно передаваемых сигналов. Сложности возрастают при добавлении незначительных физических эффектов для изменения фазы сигнала, таких как эффект вследствие температурных изменений электронных схем в повторителе.
В спутниках также должны учитываться доплеровские эффекты и прочее, вызываемые посредством относительности и посредством гравитационного потенциала. Эти непредсказуемые эффекты изменения фазы должны быть приняты во внимание, чтобы гарантировать определения расстояния посредством отражения сигналов (или посредством повторной передачи). Изменения во времени, вызываемые посредством распространения сигнала в средах, могут становиться значительными и должны зависеть от приспосабливаемых моделей и от углов обзора повторителей, которые должны быть определены. Определение этих изменений является необходимым условием для того, чтобы обеспечивать осуществимость применения систем и способов геопозиционирования, навигации и распространения во времени с использованием наземных ориентиров и транспондеров в пространстве, как упомянуто выше.
Сущность изобретения
С учетом функциональных требований систем передачи беспроводных сигналов с использованием удаленной и недоступной станции-повторителя, а также необходимости обычного точного и мгновенного определения географического позиционирования вышеуказанной удаленной станции, настоящее изобретение имеет целью определять и предоставлять способ и систему, относительно простые в реализации и экономически осуществимые, с тем чтобы предоставлять корректное и мгновенное определение временных изменений, задержек по фазе и сдвигов частоты, при повторной передаче и распространении сигналов, которые могут содержать аудио, видео и другую информацию, такую как кодированные сигналы времени, связанные с удаленной и недоступной станцией-повторителем, в общем, перемещающейся в пространстве.
Согласно решению, предложенному посредством настоящего изобретения, можно определять, в любой момент времени, корректное географическое и пространственное позиционирование и регулирование индикации времени относительно станции-повторителя, удаленной и недоступной, из определения изменений во времени при повторной передаче и распространении сигналов, которые удаленная станция, расположенная на большом расстоянии и имеющая транспондер (приемо-передатчик или повторитель), принимает из стационарного передатчика сигналов, расположенного в известном и доступном узле.
Согласно изобретению способ для того, чтобы определять временные изменения и задержки по фазе в станции-повторителе сигналов, удаленной и недоступной, и временные задержки вследствие распространения сигнала, содержит один первый этап, чтобы устанавливать четыре опорных базы на земле в известных географических позициях, видимых со станции-повторителя. Следующий этап состоит в испускании, в опорный момент времени посредством передающего устройства, предоставляемого в одной из вышеуказанных опорных баз, указанной в данном документе в качестве центральной базы, кодированного сигнала времени, содержащего идентификатор опорной базы, которая испускает его, и момента времени испускания; и этап, чтобы принимать, посредством приемного устройства, установленного в каждой из четырех опорных баз, кодированный сигнал, который принят и повторно передан посредством станции-повторителя.
После завершения вышеуказанных этапов способ переходит к вычислению разности по меньшей мере двух позиций для станции-повторителя для идентичного передаваемого кодированного сигнала, причем это вычисление выполняется с использованием по меньшей мере двух отдельных наборов из трех опорных баз, при том, что известно, что вышеуказанная разность зависит от значения изменения во времени, по фазе или частоте, приписанного станции-повторителю. Различные значения для временных изменений затем приписываются систематически и произвольно, и для каждого из этих приспосабливаемых значений вычисляются различные значения для разностей между двумя позициями. Как выше указано для разностей между каждыми двумя соответствующими позициями для станции-повторителя, можно идентифицировать, какое значение, приписанное временным изменениям в повторителе, формирует минимальную разность для двух позиций, вычисленных для станции-повторителя. Вычисления, отвлекаемые на эту фазу способа, выполняются в итеративной форме, например, посредством последовательных приближений с применением различных значений для временных изменений, которые могут происходить при прохождении сигнала посредством станции-повторителя до тех пор, пока не будет идентифицировано значение, для которого разность между двумя вычисленными позициями для повторителя становится минимальной. Это значение задает изменение во времени, по частоте или фазе в станции-повторителе, выведенное из минимума, найденного для разности позиций для повторителя. Расстояния от четырех баз до повторителя теперь могут быть скорректированы с применением временного изменения, которое определено. Далее значение временного изменения может быть использовано для того, чтобы определять корректную позицию повторителя. Идентичный итеративный способ может включать в себя другие временные изменения вследствие характеристик скоростей распространения сигналов передающей среды, приспосабливаемых согласно известным моделям распространения, и с использованием углов возвышения, под которыми повторитель наблюдается из баз, найденных с использованием идентичной итеративной процедуры.
В одном возможном варианте применения способа дополнительно предоставляется еще один этап для того, чтобы определять координаты станции-повторителя с коррекцией изменения во времени, по частоте или фазе для соответствующего момента времени.
В другом варианте применения способа сигналы времени распространяются в другие точки на земле с известными географическими позициями, чтобы синхронизировать их соответствующие генераторы синхросигналов.
Краткое описание чертежей
Настоящее изобретение описывается со ссылкой на прилагаемые чертежи, предоставляемые в пределах объема для иллюстрации, а именно:
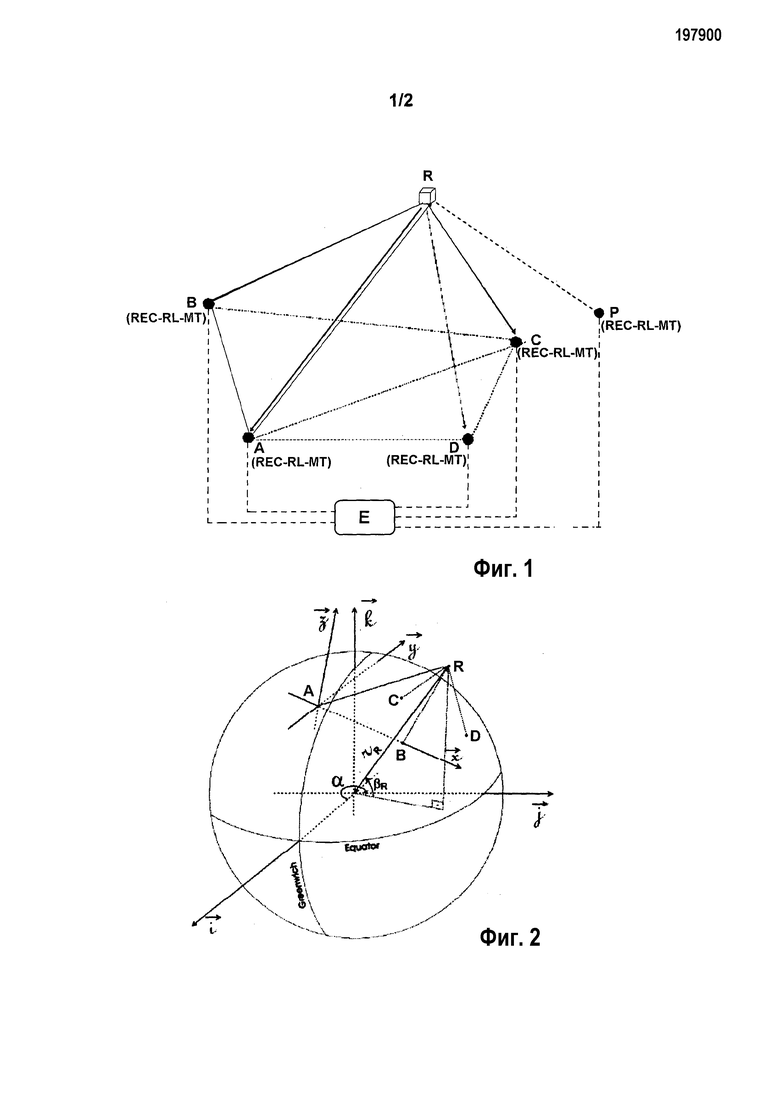
Фиг. 1 является схематичным видом в перспективе, иллюстрирующим пространственное позиционирование повторителя сигналов, удаленного и недоступного относительно четырех баз, установленных на земле в известных географических позициях, причем по меньшей мере одна из них содержит передатчик кодированных сигналов, которые должны быть приняты и повторно переданы посредством станции-повторителя в пространстве, при этом четыре базы содержат приемники сигналов, повторно передаваемых посредством станции-повторителя, при том, что позиция, помеченная как P, указывает цель, координаты которой известны или должны быть определены, в зависимости от варианта применения, который описывается далее.
Четыре базы имеют свои собственные средства связи с центральной станцией обработки, в которую они отправляют разности времен между сигналом времени, повторно передаваемым посредством повторителя, и своими соответствующими синхросигналами. Для простоты, центральная станция обработки может быть идентичной опорной базой, в которой передаются и сигналы времени.
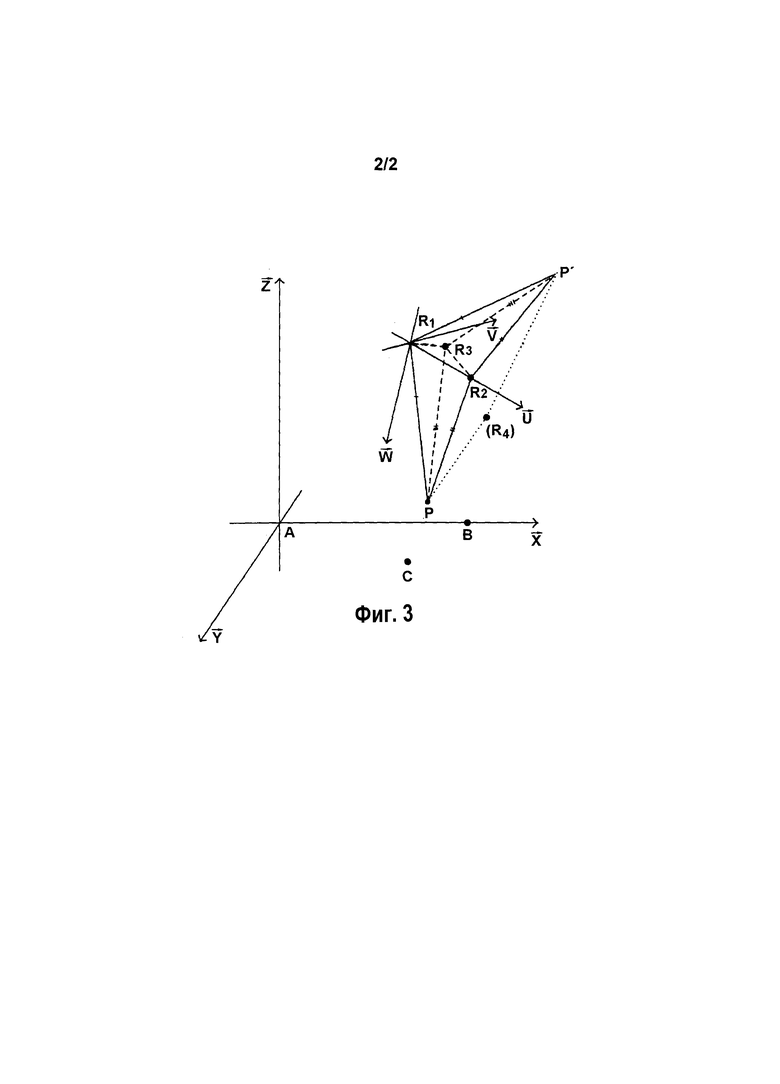
Фиг. 2 представляет схематичный вид в перспективе, иллюстрирующий систему координат, сферическую и евклидову, используемую для того, чтобы составлять уравнение для пространственного позиционирования станции-повторителя, проиллюстрированной на фиг. 1; и фиг. 3 представляет четыре различные позиции для станции-повторителя в двух системах координат, одна из которых упоминается как x, y, z, а другая упоминается как u, v, w, используемые для того, чтобы находить позицию цели P, координаты которой должны быть определены.
Подробное описание изобретения
Как упомянуто выше и проиллюстрировано на прилагаемой фиг. 1, изобретение предоставляет способ и систему для беспроводной передачи сигналов, таких как, например, цифровые аудио- или видеосигналы либо даже аналоговые сигналы, с использованием станции-повторителя R, удаленной и недоступной, которая может быть представлена посредством спутниковой платформы или другого объекта, или устройства-повторителя любого вида, способного принимать и повторно передавать, в предварительно определенных направлениях, кодированные сигналы времени.
Изобретение, представленное в данном документе, использует четыре опорные базы A, B, C и D, причем каждые три из них не являются коллинеарными, установленные на земле (см. фиг. 1) в известных географических позициях, при этом каждая из баз содержит устройства приема сигналов, таких как радиочастотные сигналы, модулированные в цифровой форме, например в аудио или видео, и принимаемые и повторно передаваемые посредством станции-повторителя R в пространстве. Кодированные сигналы времени передаются посредством одной из опорных баз A, B, C и D и повторно передаются посредством станции-повторителя R в пространстве обратно в опорные базы A, B, C и D.
Согласно предложенной системе одна из четырех опорных баз A, B, C, D содержит один передатчик T кодированных сигналов времени и один приемник REC сигналов, повторно передаваемых посредством транспондера, предоставляемого в удаленной станции-повторителе R. Для упрощения описания передатчик ассоциирован с базой A. Четыре опорных базы A, B, C, D имеют приемники, чтобы принимать кодированные сигналы времени, повторно передаваемые посредством удаленного транспондера в станции-повторителе R. За исключением базы A, которая содержит средство T передачи, другие базы имеют средства для того, чтобы передавать соответствующие разности между кодированным сигналом времени, принимаемым из удаленного транспондера, и кодированным сигналом времени, сформированным в каждом из них, в центральную базу E обработки. Для упрощения, опорная база A (здесь называемая центральной базой) может быть идентичной базой, которая передает сигналы времени. В центральной базе кодированный сигнал времени, принимаемый из удаленного транспондера, сравнивается с кодированным сигналом времени, сформированным в идентичной опорной базе. Четыре опорные базы имеют собственные прецизионные генераторы синхросигналов RL, каждый из которых синхронизирован друг с другом.
Четыре опорные базы A, B, C, D имеют собственные прецизионные генераторы синхросигналов RL и средства для того, чтобы сравнивать сигнал времени, повторно передаваемый посредством удаленного транспондера, со временем, сформированным локально. Опорные базы обрабатывают свои локальные разницы во времени и передают их в центральную базу E, которая для простоты может быть идентичной опорной базой A, которая также испускает исходную передачу сигналов. Локальные разницы во времени должны быть переданы в центральную базу посредством некоторого средства связи, такого как, например, коммерческая линия связи, или с использованием идентичной удаленной станции-повторителя для передачи данных.
Корректная позиция для пространственной станции-повторителя R должна зависеть от сведений по временным изменениям и/или задержке по фазе в станции-повторителе R и по временным изменениям и/или задержке по фазе, вызываемым посредством распространения сигнала в передающей среде, требуемым для того, чтобы корректировать разности времен, измеренные относительно каждой из трех из четырех опорных баз A, B, C и D. Оптимизация производительности системы требует сведений по задержкам по фазе, испытываемым посредством передаваемых сигналов во всех сегментах и, в частности, в кодированном сигнале времени, перемещаемом посредством станции-повторителя (транспондера) R, и задержкам по фазе, вызываемым посредством распространения.
Настоящее изобретение разрешает текущие сложности в определении, корректно и посредством экономически осуществимого средства, измерений временных изменений или задержек по фазе, например, испытываемых посредством сигнала в ретрансляционной линии в станции-повторителе R, удаленной и недоступной, и при распространении в соответствующих средах, к примеру в земной атмосфере и ионосфере, которые возникают для станций, расположенных в пространстве, на спутниковых платформах.
При применении четырех опорных баз существует несколько возможных форм для того, чтобы определять временную вариацию сигнала, принимаемого и повторно передаваемого посредством станции-повторителя или посредством транспондера. Может быть использована, например, более общая процедура с большой точностью, чтобы определять изменения во времени в станции-повторителе R, которая не зависит от расположения плоскостей, содержащих четыре опорные базы A, B, C и D.
Можно приспосабливать идентичные сферические и евклидовы системы координат, используемые в работе P.L. Kaufmann и др. (2006 год), проиллюстрированной на фиг. 2, алгоритм которой позволяет составлять уравнение для координат повторителя R, полученных для опорных баз A, B, C и D.
Измерения, полученные посредством системы, предоставляют следующие данные согласно перечню уравнений, заданному ниже:
AR(δR)=(ΔtA-δAt-δAr-δR) (c/2)-2ΔpdAR

BR(δR)=(ΔtB-δAt-δBr-δR) c-AR(δR)- ΔpdBR-ΔpdAR
CR(δR)=(ΔtC-δAt-δCr-δR) c-AR(δR)-ΔpdCR-ΔpdAR
DR(δR)=(ΔtD-δAt-δDr-δR) c-AR(δR)-ΔpdDR-ΔpdAR,
где AR(δR), BR(δR), CR(δR) и DR(δR) представляют собой расстояния от баз A, B, C и D до позиции повторителя R, соответственно, выражаемые как функция от временных изменений сигналов, перемещаемых посредством повторителя, δR, который должен быть определен; ΔtA, ΔtB, ΔtC и ΔtD представляют собой разности времен, эффективно измеренные в базах A, B, C и D, соответственно; δAt представляет собой изменение во времени, вызываемое посредством прохождения сигнала посредством схем и кабелей при передаче из базы A, заранее измеренное и известное; δAr, δBr, δCr и δDr представляют собой изменения во времени, вызываемые при прохождении сигнала через схемы и кабели при приеме в базах A, B, C и D, соответственно, заранее измеренные и известные; и c представляет собой скорость электромагнитных волн, транспортирующих кодированные сигналы времени, таких как, например, радиоволны в вакууме, и ΔpdAR, ΔpdBR, ΔpdCR, и ΔpdDR представляют собой ошибки в расстоянии сегментов AR, BR, CR и DR, временные задержки, вызываемые посредством распространения сигналов в физических средах (атмосфере, ионосфере).
Вышеописанные ошибки в расстоянии, вызываемые посредством временных отклонений вследствие распространения в передающей среде, добавляются к отклонению расстояния вследствие изменения во времени сигнала в повторителе, δR, которое является одинаковым для четырех сегментов AR, BR, CR и DR. Координаты для станции-повторителя R, как определено для баз A, B и C, выражаются посредством алгоритма, уже разработанного в работе P. L. Kaufmann и др. (2006 год), в системе отсчета, проиллюстрированной на фиг. 2, относительно оси x, y и z, в качестве функции от сигнала при перемещении посредством повторителя, δR, который должен быть определен:
xR(δR)={[AR(δR)]2-[BR(δR)]2+AB2}/2AB
yR(δR)={[r1(δR)]2-[r2(δR)]2}/2yC}+yC/2
zR(δR)={[r1(δR)]2-[yR(δR)]2}1/2,
где:
[r1(δR)]2=[AR(δR)]2-[xR(δR)]2
[r2(δR)]2=[CR(δR)]2-[(xC-xR(δR)]2
При необходимости выражать результат в сферических координатах, широте, долготе и высоте над уровнем моря для повторителя, они могут быть выведены посредством простой обратной аналитической процедуры. С другой стороны, с использованием измерений, полученных с использованием базы D, мы получаем:
xR'(δR)={[AR(δR)]2-[BR(δR)]2+AB2}/2AB (igual R(δR))
yR'(δR)={[r1'(δR)]2-[r2'(δR)]2}/2yD}+yD/2
zR'(δR)={[r1'(δR)]2-[yR'(δR)]2}1/2,
где:
[r1'(δR)]2=[AR(δR)]2-[xR'(δR)]2 (igual a[r1(δR)]2)
[r2(δR)]2=[DR(δR)]2-[(xD-x'R(δR)]2
Две системы уравнений позволяют формулировать разности в позиции повторителя в качестве функции от времени, предназначенного для определения, согласно следующему выражению:
f(δR)=|[xR(δR), yR(δR), zR(δR)]-[x'R(δR), yR'(δR), zR'(δR)]|2=
=[xR(δR)-xR'(δR)]2+[yR(δR)-yR'(δR)]2+
+[zR(δR)-zR'(δR)]2
С использованием известных способов численного расчета, таких как итеративные процедуры, например, посредством последовательных приближений, с применением различных значений для временных изменений, которые могут происходить при прохождении сигнала посредством станции-повторителя, находится значение задержки δR по фазе в станции-повторителе R, для которой функция f(δR) предполагает минимальное значение, которое должно быть близким к искомому значению, необходимому для использования посредством системы, рассматриваемой в этом изобретении. Эта процедура может осуществляться за счет одновременного использования данных из других двух наборов опорных баз A, B, D и A, C, D с применением базы A в качестве передатчика и повышением точности определения δR.
Итеративный способ, описанный выше, может включать в себя коррекции изменений во времени вследствие скоростей распространения, отличных от c, сигналов, которые транспортируют кодированную информацию времени в средах, представленных посредством нижних и верхних слоев земной атмосферы. Эти скорости отличаются от скорости c света в вакууме, и их эффект соответствует задержкам по фазе и во времени, приводящим к большему кажущемуся расстоянию для измеренных сегментов, как описано посредством уравнений системы (1). Соответствующие временные задержки или задержки по фазе соответствуют отклонениям в соответствующих сегментах, которые могут быть вычислены одновременно посредством итеративного способа, описанного выше, с определением углов возвышения из повторителя H, при наблюдении из баз A, B, C и D, и применения модели для того, чтобы описывать соответствующие отклонения сегментов (как, например, описано в работе S.M. Hunt и др. "Equatorial atmospheric and ionospheric modeling at Kwajalein missile range", Lincoln Laboratory Journal, издание 12, стр. 45-64, 2000 год; S.M. Honma, Y. Tamura и M.J. Reid "Tropospheric delay calibrations for VERA", Publ. Astron.Soc. Japan., издание 60, стр. 951-960, 2008). Вычисления способа повторяются с применением отклонений для соответствующих сегментов вследствие эффектов распространения в земной атмосфере, добавляемых в системы уравнений (1), с получением коррекции на время перемещения в повторителе, добавляемой в коррекцию на времена распространения сигнала во всех сегментах, что дает возможность вычисления искомых координат с большой точностью. Способ и система, предложенные посредством изобретения, обеспечивают возможность удаленного определения временных изменений в линии связи, заданной посредством станции-повторителя сигналов, и временных изменений вследствие распространения сигналов в передающей среде, одновременно с измерениями расстояния, навигации, тактовой синхронизации и географического позиционирования, для каждой дискретной временной последовательности, используемой в процедуре. Чтобы вычислять скорректированные расстояния, географические координаты повторителя и целей и вариантов применения во временной синхронизации, должны использоваться аналитические процедуры, описанные в статье P. L. Kaufmann и др. "Non recursive algorithm for remote geolocation using ranging measurements", Math. Problems in Engineering, v. 2006 год, стр. 1-9, статья ID79389, DOI:10.1155/MPE/2006/79389, 2006 год.
Задержки по фазе, соответствующие опорным базам A, B, C и D, могут быть оптимально определены "на месте" и допускаются в качестве фиксированных и известных данных, с учетом того, что такие опорные базы являются неподвижными и доступными для всех процедур для верификации измерений.
Решение, предложенное посредством настоящего изобретения, обеспечивает экономическую возможность, с высокой степенью точности, определения задержек по фазе и временных изменений при прохождении кодированных сигналов времени посредством станции-повторителя R (при приеме и повторной передаче), в удаленном и недоступном местоположении, а также изменений во времени, вызываемых посредством эффектов распространения в передающей среде.
Временные эффекты в кодированных сигналах времени при прохождении через станцию-повторитель R и временные эффекты, вызываемые посредством распространения сигнала под другим углом возвышения, являются неизвестными и не могут быть определены только с помощью трех опорных баз в системе, которая задает только одну позицию для повторителя R.
Способ, предложенный в данном документе, также может включать в себя этапы для того, чтобы: испускать, из вышеуказанной опорной базы в последовательные моменты времени, кодированные сигналы и получать последовательные координаты для станции-повторителя R, скорректированные в функции изменений во времени, по фазе и частоте, при повторной передаче вышеуказанного упомянутого последовательного кодированного сигнала, чтобы обеспечивать возможность навигации станции-повторителя R, при проведении вычислений координат для повторителя, показанных выше, с помощью системы уравнений (2), в которую вводятся изменения во времени (δR) и ΔpdAR, ΔpdBR, ΔpdCR и ΔpdDR, определенные согласно настоящему изобретению; повторно передавать, посредством станции-повторителя R, кодированные сигналы времени в другие цели, географические координаты которых известны (одна из них представлена в этой заявке посредством точки P на фиг. 1); определять разность между кодированным сигналом времени, который поступает в цель P, и временем, сформированным посредством собственного синхросигнала, Δ'p, что обеспечивает коррекцию синхронизма согласно уравнению (P.L. Kaufmann и др., 2006 год):
Δ'p=(AR/c)+(PR/c)+δAt+δPr+δR+ΔpdPR+ΔpdAR
где AR и PR являются измеренными сегментами, δAt и δPr являются временными изменениями, заранее определенными и известными в передатчике и в цели P с известной позицией, соответственно, δR и ΔpdPR являются изменениями во времени, определенными посредством настоящего изобретения. Синхронизация или временная корректировка представляет собой Δ'p-Δp, где Δp является разностью времен, теоретически спрогнозированной для позиции P.
Другой возможный этап заключается в том, чтобы повторно передавать, посредством станции-повторителя R, кодированные сигналы времени в другие цели с неизвестной позицией (аналогично представленные посредством точки P на фиг. 1), причем их генераторы синхросигналов синхронизированы с генераторами синхросигналов, установленными в четырех опорных базах, A, B, C, D; получать расстояния от станции-повторителя R до других целей, скорректированные на предмет временных изменений при повторной передаче и при распространении; и определять координаты для целей по меньшей мере в три последовательных момента времени с применением коррекций во времени, по частоте и фазе. Следовательно, можно вычислять расстояние от станции-повторителя R до опорных баз A, B, C, D и до целей с позициями, которые должны быть определены, с коррекциями изменений во времени при повторной передаче и при распространении, в позициях повторителя R в четыре различных момента времени, причем эти позиции не находятся на прямой линии в пространстве, однозначно задавая, в любой системе координат в пространстве, посредством четырех последовательных измерений, пространственную позицию цели, которую предложено определять. Аналитическое решение для того, чтобы выполнять эти вычисления, может следовать, например, алгоритму, опубликованному в работе P.L. Kaufmann и др. (2006 год), повторяющему процедуры, выражаемые посредством уравнений (1), (2) и (3) относительно одного набора из трех опорных баз, которые включают в себя базу A, в которой находится передатчик, в течение четырех вышеуказанных моментов времени, получающему четыре сферы с различными радиусами, все из которых центрированы на повторителе, в позициях и различные моменты времени, соответственно. Перехват сфер предоставляет позицию цели P, координаты которой становятся определенными. Практическая процедура проиллюстрирована на фиг. 3 (после P.L. Kaufmann и др., 2006 год), в которой цель P с позицией, которая должна быть определена (A, x, y, z), находится относительно четырех различных позиций повторителя R1, R2, R3 и R4, представляет собой последнюю позицию в случае, когда поверхность самой планеты не может быть использована в качестве четвертой опорной поверхности. Операции осуществляются посредством добавления другой системы координат в качестве функции от позиций повторителя в R1, R2, R3 и R4 (см. фиг. 3), (R1, u, v, w), в которой координаты u, v и w цели составляют решение для системы. В работе P.L. Kaufmann и др. (2006 год) показано то, что для позиций трех повторителей находятся два решения:
uP=(PR1 2-PR2 2+R1R2 2)/2R1R2
vp=[(ρ1 2-ρ2 2)/2 vR3]+vR3/2
wP=±(ρ1 2-vp 2)1/2 ,
где ρ1 2=PR1 2-uP 2 e ρ2 2=PR3 2-(uR3-uP)2.
Неопределенность в сигнале wP исключается посредством применения четвертой сферы, чтобы задавать только одну позицию. Это может быть перехватом с поверхностью планеты, взятой в качестве четвертой опорной поверхности, или посредством добавления одной четвертой позиции для станции-повторителя R4 (см. фиг. 3), формирующей соответствующую четвертую сферу с радиусом PR4.
Найденное с использованием известных аналитических процедур решение по позиции может быть преобразовано в систему (A, x, y, z) посредством определения позиции P (xP, yP, zP) в этой системе координат. В случае, если есть интерес к выражению результатов в сферических координатах (широта, долгота, высота над уровнем моря станции-повторителя), они могут быть найдены с использованием известных аналитических процедур, выведенных из простых известных операций.
Техническое решение, предложенное посредством настоящего изобретения, позволяет выбирать опорное время или час для того, чтобы выполнять измерения, если существует синхронизм между генераторами синхросигналов, предоставляемыми в опорных базах и/или в целях с позициями, которые должны быть определены.
Предложенное техническое решение дает возможность: определения географических и пространственных позиций целей, расположенных на расстояниях, которые находятся в пределах линии видимости при наблюдении из повторителя R в пространстве; прогнозирования для применения большего числа неподвижных опорных баз A, B, C, D, покрывающих большие географические протяженности, с использованием идентичного повторителя R в пространстве; прогнозирования для применения нескольких станций-повторителей R в пространстве с расширением области на наземной поверхности, которая может исследоваться, с тем чтобы задавать геопозиционирование целей; вычисления географической позиции целей с помощью четырех транспондеров в пространстве, отстоящих на определенное расстояние друг от друга, с одним взаимодействием между сигналами времени; и обеспечения выполнения сотен последовательных измерений в минуту времени для одной или более целей, стационарных или мобильных, с использованием одной станции-повторителя R в пространстве.
Представленные в данном документе способ и система могут применяться к любому виду транспондеров или повторителей электромагнитных волн, в общем, в пространстве, будь то искусственные или естественные, активные или пассивные.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ГЕОГРАФИЧЕСКОГО И ПРОСТРАНСТВЕННОГО ПОЗИЦИОНИРОВАНИЯ | 2004 |
|
RU2365934C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАЗЫСКИВАЕМЫХ ТРАНСПОНДЕРОВ ИЗ МНОЖЕСТВА ПАССИВНЫХ ТРАНСПОНДЕРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497147C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОРРЕКЦИЙ ЧАСОВ | 2012 |
|
RU2574333C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО РОБОТА С ИСПОЛЬЗОВАНИЕМ ОДНОМАЯКОВОЙ СИСТЕМЫ | 2014 |
|
RU2556326C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486537C2 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2486538C2 |
Изобретение относится к радиотехнике и может использоваться в системах определения местоположения. Технический результат состоит в повышении точности определения временных изменений при повторной передаче. Для этого решение включает в себя использование четырех опорных баз (A, B, C, D) на земле в известных позициях с кодированным сигналом времени, передаваемым посредством одного из них, который повторно передается посредством станции-повторителя и принимается посредством каждой из опорных баз. С использованием двух отдельных наборов из трех опорных баз можно вычислять разности между двумя позициями для станции-повторителя (R), назначаемые последующим изменениям во времени, по фазе или частоте, а также временным изменениям вследствие распространения сигнала в передающей среде, для соответствующих углов возвышения, найденных для повторителя. Затем можно идентифицировать то, какие значения, приписанные временным изменениям, формируют минимальную разность между двумя соответствующими позициями станции-повторителя (R). Идентифицированное временное изменение может использоваться для корректного определения станции-повторителя и ее использования в надлежащих вариантах применения. 2 н. и 13 з.п. ф-лы, 3 ил.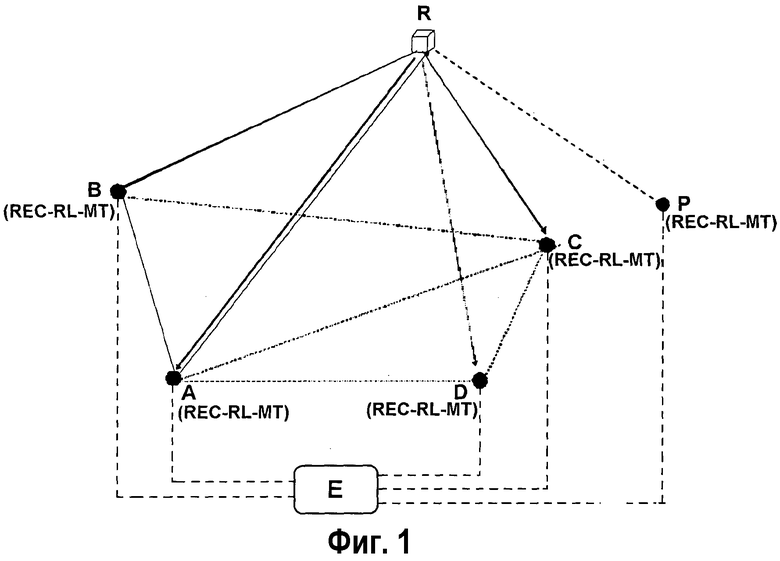
1. Способ для определения временных изменений при повторной передаче и распространении сигналов, для измерения расстояний, синхронизирования исполнительных механизмов и выполнения геопривязки, отличающийся тем, что он содержит этапы, на которых:
a - устанавливают четыре опорные базы (A, B, C, D) на земле, причем каждые три из них не являются коллинеарными, в известных географических позициях, видимых со станции-повторителя (R);
b - испускают, в опорный момент времени и из передающего устройства (T), предоставленного в одной из вышеуказанных опорных баз, один кодированный сигнал времени, содержащий идентификатор испускающей опорной базы и момента времени испускания;
c - принимают, в приемном устройстве (REC), установленном в каждой из четырех опорных баз (A, B, C, D), кодированный сигнал, принимаемый и повторно передаваемый посредством станции-повторителя (R);
d - систематически приписывают различные произвольные значения изменения во времени, по фазе или частоте, для повторителя (R) и вычисляют, для каждого приписанного временного изменения, одну соответствующую разность позиций для станции-повторителя (R), полученную с использованием двух отдельных наборов из трех опорных баз (A, B, C и A, B, D; A, B, C и B, C, D; A, B, D и B, C, D);
e - идентифицируют то, какое из приписанных значений для временных изменений в повторителе (R) приводит к минимальной разности между двумя позициями станции-повторителя (R), полученной с использованием двух отдельных наборов из трех опорных баз (A, B, C и A, B, D; A, B, C и B, C, D; A, B, D и B, C, D); и
f - используют временное изменение, найденное на этапе "e", для того чтобы определять позицию повторителя (R).
2. Способ по п. 1, отличающийся тем, что разностные позиции для станции-повторителя (R) вычисляются алгебраически с приписыванием определенных значений вышеупомянутому временному изменению при достаточно высоком числе значений, достаточном для идентифицирования так называемого минимального значения сравнительных разностей.
3. Способ по п. 2, отличающийся тем, что реализация итеративных вычислений разностей между позициями станции-повторителя включает в себя и корректирует эффект, вызываемый посредством временных изменений вследствие характеристики распространения сигнала передающей среды, в которой работает система, с применением известных моделей распространения и с использованием углов возвышения для станции-повторителя (R) при наблюдении из различных баз (A, B, C, D), чтобы определять точную и окончательную позицию станции-повторителя (R).
4. Способ по п. 3, отличающийся также тем, что он включает в себя еще один этап, на котором: определяют координаты станции-повторителя (R) с коррекциями изменений во времени, по частоте или фазе для данного опорного момента времени.
5. Способ по любому из пп. 3 или 4, отличающийся также тем, что он включает в себя еще один этап, на котором распространяют сигналы времени в другие точки на земле, с известными географическими позициями, для синхронизации соответствующих синхросигналов.
6. Способ по любому из пп. 3 или 4, отличающийся также тем, что он включает в себя следующие этапы, на которых:
- испускают, из упомянутой опорной базы и в последовательные моменты времени, кодированные сигналы и получают последовательные координаты для станции-повторителя (R), скорректированные с учетом изменений во времени, по частоте или фазе при повторной передаче и распространении упомянутых кодированных сигналов времени, чтобы определять навигацию станции-повторителя (R);
- повторно передают, посредством станции-повторителя (R), кодированные сигналы времени в другие цели с неизвестными географическими позициями, каждая из которых имеет собственные генераторы синхросигналов, синхронизированные с генераторами синхросигналов, установленными в четырех опорных базах (A, B, C, D);
- получают расстояния от станции-повторителя (R) до других целей, скорректированные на предмет изменений во времени при повторной передаче и при распространении в передающей среде; и
- определяют координаты целей посредством измерения разностей времен по меньшей мере в три последовательных момента времени при применении изменений во времени, по фазе или частоте.
7. Способ по п. 6, отличающийся также тем, что он содержит этап, на котором:
- вычисляют расстояние от станции-повторителя (R) до опорных баз (A, B, C, D) и до целей с географическими позициями, которые должны быть определены, с коррекциями изменений во времени в станции-повторителе (R) и с коррекциями, вызываемыми посредством распространения сигнала в передающей среде, для позиций станции-повторителя (R) в четыре различных момента времени, причем эти позиции не располагаются вдоль одной прямой линии, с однозначным заданием, в данной произвольно выбранной системе координат в пространстве посредством четырех последовательных измерений, пространственного позиционирования целей, поиск местоположения которых выполняется.
8. Система для определения временных изменений при повторной передаче и распространении сигналов, предназначенных для измерения расстояний, синхронизации исполнительных механизмов и выполнения геопривязки, из удаленной и недоступной станции-повторителя (R), содержащей транспондер, причем эта система отличается тем, что она содержит:
a - четыре опорных базы (A, B, C, D) на земле, причем каждые три из них не являются коллинеарными, в известных географических позициях, видимых со станции-повторителя (R);
b - одно передающее устройство (T), предоставленное в одной из баз (A), способное испускать, в опорный момент времени, кодированный сигнал времени, содержащий идентификатор опорной передающей базы (A) и момента времени испускания;
c - одно приемное устройство (REC), установленное в каждой из четырех опорных баз (A, B, C, D), способное принимать кодированный сигнал времени, испускаемый посредством передающего устройства (T) и принимаемый и повторно передаваемый посредством станции-повторителя (R);
d - прецизионные генераторы синхросигналов (RL), каждый из которых устанавливается в каждой из четырех опорных баз (A, B, C, D);
e - одну центральную станцию (E) обработки, которая принимает кодированный сигнал времени, повторно передаваемый посредством станции-повторителя (R), сравнивает его с кодированным сигналом времени, сформированным в испускающей опорной базе (A), и назначает различные произвольные значения для изменений во времени, по фазе или частоте для станции-повторителя (R), вычисляет, для каждого из назначенных временных изменений, соответствующую разность между позициями для станции-повторителя (R), полученную с использованием двух отдельных наборов из трех ориентиров (A, B, C и A, B, D; A, B, C и B, C, D; A, B, D и B, C, D), идентифицирует то, какое значение, назначаемое временному изменению в повторителе (R), приводит к минимальной разности между двумя позициями, найденными для станции-повторителя (R), и обрабатывает соответствующее временное изменение, чтобы определять позицию станции-повторителя (R); и
f - одно средство или устройство передачи (MT), предоставленное в каждой из трех опорных баз (B, C, D), отличное от передатчика, который формирует кодированный сигнал времени, при этом каждое средство или устройство передачи (MT) перенаправляет в центральную станцию (E) обработки разность времен между кодированным сигналом времени, принимаемым из транспондера в станции-повторителе (R), и соответствующим кодированным сигналом времени, сформированным в каждой из вышеупомянутых трех опорных баз (B, C, D).
9. Система по п. 8, отличающаяся тем, что центральная станция (E) обработки задается в испускающей опорной базе (A), содержащей передатчик (T).
10. Система по п. 8, отличающаяся тем, что центральная станция (E) обработки может алгебраически вычислять разности между позициями станции-повторителя (R) с назначением определенных значений для временных изменений, при достаточном числе назначений для обеспечения идентификации минимального значения для сравнительных разностей.
11. Система по п. 10, отличающаяся тем, что повторение итеративных вычислений разностей между позициями станции-повторителя (R), обработанными посредством центральной станции (E) обработки, включает в себя характеристики скоростей распространения сигнала в передающей среде, в которой они распространяются, полученные из известных моделей и углов возвышения станции-повторителя (R) при наблюдении из различных опорных баз (A, B, C, D).
12. Система по п. 11, отличающаяся тем, что центральная база (E) обработки определяет координаты станции-повторителя (R) с коррекцией изменений во времени, по частоте или фазе для данного опорного момента времени.
13. Система по любому из пп. 11 или 12, отличающаяся тем, что она также включает в себя другие точки на земле с известными географическими позициями, в которые распространяются сигналы времени, для синхронизации соответствующих систем генераторов синхросигналов.
14. Система по любому из пп. 11 или 12, отличающаяся тем, что она также включает в себя другие цели с неизвестными географическими позициями, имеющими собственные генераторы синхросигналов, синхронизированные с генераторами синхросигналов, установленными в четырех опорных базах (A, B, C, D), при этом опорная база (A) испускает в последовательные моменты времени кодированные сигналы времени, причем центральная база (E) обработки предоставляет последовательные координаты для станции-повторителя (R), скорректированные на предмет изменений во времени, по фазе или частоте, возникающих при повторной передаче и вследствие распространения упомянутых кодированных сигналов времени, определяет навигацию станции-повторителя (R); причем упомянутые другие цели принимают кодированные сигналы времени, повторно передаваемые посредством станции-повторителя (R), при этом упомянутая центральная станция (E) обработки получает расстояния от станции-повторителя (R) до других целей, скорректированные на предмет временных изменений при повторной передаче и при распространении в передающей среде, и определяет координаты целей посредством измерения разниц во времени по меньшей мере для трех последовательных моментов времени, приспосабливает коррекцию на предмет временных изменений во времени, по фазе или частоте и для распространения в передающей среде.
15. Система по п. 14, отличающаяся тем, что центральная станция (E) обработки вычисляет расстояние от станции-повторителя (R) до опорных баз (A, B, C, D) и до целей с географическими позициями, которые должны быть определены, с коррекциями временных изменений в станции-повторителе (R), и с коррекциями, вызываемыми посредством распространения в передающей среде, позиций станции-повторителя (R) в четыре различных момента времени, причем эти позиции не находятся на идентичной прямой линии с однозначным заданием, в любой системе координат в пространстве, искомой пространственной позиции цели посредством четырех последовательных измерений.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления водной суспензии инсектофунгисидов | 1948 |
|
SU74217A1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ | 2009 |
|
RU2414726C2 |
| US7822427B1, 26.10.2010 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

