Изобретение относится к области гидроакустических навигационных систем и может быть использовано для мобильного навигационного обеспечения подводных роботов, в том числе работающих в ледовых условиях.
Известен способ навигации подводного объекта посредством гидроакустической навигационной системы (патент РФ №2444759, МПК G01S 15/08, 2012 г.). В нем для вычисления координат используют базу из М гидроакустических приемоответчиков, размещенных на дрейфующих станциях по водной поверхности и донных станциях на морском дне.
Недостатками способа являются: ограничение района дальностью связи подводного робота с отдельным приемоответчиком; ограничение мобильности, вызванное значительными временными затратами на развертывание и свертывание навигационной системы; увеличение стоимости навигационной системы за счет необходимости применения нескольких сложных автономных систем, какими являются дрейфующие по водной поверхности и донные гидроакустические приемоответчики.
Также известен способ навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна (патент РФ №2344435, МПК G01S 3/80, 2009 г.). В нем для определения координат используют один опорный гидроакустический маяк, буксируемый обеспечивающим судном, которое перемещают в соответствии с движениями подводного робота. Оценка координат производиться путем комплексной обработки данных бортовой системы счисления пути и сигналов гидроакустической навигационной системы.
Этот способ навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна, по своему функциональному назначению, по своей технической сущности и достигаемому результату наиболее близок заявленному и принят за прототип.
Недостатки прототипа:
- необходимость перемещать опорный гидроакустический маяк в соответствии с движением автономного подводного робота вдоль его трассы;
- необходимость в установке на борту подводного робота координат его стартовой точки.
Указанные недостатки вносят существенные трудности в применение подводных роботов в ледовых условиях ввиду того, что возможности перемещения опорного маяка ограничены, а всплытие для повторной установки стартовых координат в случае потери навигации часто затруднительно или невозможно.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа навигационного обеспечения подводного робота с использованием одного опорного гидроакустического маяка, обладающего высокой надежностью; точностью, достаточной для успешного исполнения миссии подводного робота; совместимостью с существующими на сегодняшний день подводными роботами; мобильностью.
Технический результат достигается тем, что для навигации подводного робота используется один опорный гидроакустический маяк, координаты которого уточняют средствами спутниковых систем навигации и передают по гидроакустическому каналу на борт подводного робота, по ходу движения которого производят измерения скорости, курса и глубины, с использованием соответствующих датчиков принимают навигационные сигналы, излучаемые опорным гидроакустическим маяком, измеряют время распространения сигнала от маяка до подводного робота; согласно изобретению на борту подводного робота инициализируют набор предполагаемых положений: точек, географические координаты которых равномерно разбросаны вокруг области погружения; изначально каждое положение считают равновероятным; количество предполагаемых положений выбирают исходя из вычислительных возможностей аппаратуры подводного робота и требуемого уровня точности определения местоположения; в момент приема подводным роботом навигационного сигнала от опорного маяка производят детерминированный сдвиг каждого предполагаемого положения в соответствии с данными курса и скорости относительно предыдущего события (начало движения, прием навигационного сигнала); дополнительно к детерминированному сдвигу добавляют нормально распределенное случайное смещение, параметры которого равны оценочным параметрам ошибки измерения скорости и курса; производят пересчет вероятностей каждого предполагаемого положения согласно измерительным данным о курсе, скорости и времени распространения; вычисляют как математическое ожидание всех предполагаемых положений итоговую оценку координат подводного робота; добавляют к результату информацию о глубине подводного робота; формируют новый набор предполагаемых положений в зависимости от новых значений вероятностей; передают по гидроакустическому каналу данные, полученные на борту подводного робота, содержащие оценку его координат в составе обратного навигационного сигнала на опорный гидроакустический маяк, затем по проводной или беспроводной линии связи на обеспечивающее судно или береговой пункт управления, где отображают траекторию движения подводного робота в реальном масштабе времени.
Существенными отличительными от способа-прототипа признаками являются: 1) на борту подводного робота не производится установка координат его стартовой точки; 2) не производится счисление траектории движения подводного робота по данным датчиков скорости, курса и глубины; 3) нет необходимости в перемещении опорного гидроакустического маяка в соответствии с движениями подводного робота и, как следствие, в привязке пункта управления к обеспечивающему судну; 4) измеряется только время распространения навигационного сигнала между опорным маяком и аппаратом, следовательно, нет необходимости в предварительной оценке величины скорости звука в районе работы подводного робота; 5) вычисление координат подводного робота производится на основе набора предполагаемых положений с использованием вероятностной оценки.
Обзор известных изобретений показал, что заявленный способ обладает новым свойством, позволяющим подводному роботу без установки координат точки старта по ходу движения определить свое местоположение (решить задачу локализации) и затем продолжить выполнение миссии с сохранением надежной точности навигации.
Сущность изобретения поясняется чертежом, где на фиг.1 изображена структурная схема реализации способа навигации подводного робота с использованием одномаяковой системы с распределением оборудования на борту подводного робота и обеспечивающего судна или берегового пункта управления.
На борту подводного робота установлена аппаратура: 1 - бортовая навигационная система, в состав которой входят: датчик скорости (лаг Доплера), компас для определения курса, и датчик глубины; 2 - блок вычисления позиции, который может быть реализован как программно, так и программно-аппартно; 3 - приемник навигационных сигналов, в состав которого входят: устройство обработки навигационного сигнала для выделения координатной информации, измеритель времени распространения сигнала между роботом и аппаратом; 4 - передатчик навигационных сигналов, содержащий информацию о текущих координатах подводного робота.
На опорном гидроакустическом маяке установлены: 5 - приемник навигационных сигналов, включающий устройство обработки навигационных сигналов для выделения координатной информации; 6 - передатчик навигационных сигналов, содержащий информацию о текущих координатах опорного маяка; 7 - аппаратура связи с обеспечивающим судном или береговым пунктом управления; 8 - приемник GPS для определения текущих координат.
Способ навигации подводного робота с использованием одномаяковой системы реализуется следующим образом.
Подводный робот посредством судовых средств опускают в воду, предварительно зафиксировав на борту координаты точки его погружения. Затем в области погружения устанавливают опорный гидроакустический маяк и определяют его координаты с помощью приемника GPS 8. На борту подводного робота в блоке вычисления позиции 2 инициализируют начальные предполагаемые положения робота:
1. Создают два массива хр [xp1..xpnpart], yp [yp1..ypnpart] содержащие координаты предполагаемых положений робота (npart - число позиций) в локальной координатной системе подводного робота.
2. Инициализируют созданные массивы координатами точек, равномерно распределенных в пределах радиуса R вокруг точки погружения.
3. Создают массив вероятностей предполагаемых положений p [p1..pnpart].
4. Все предполагаемые положения в начальный момент времени равновероятно могут быть реальной позицией аппарата. Поэтому массив вероятностей предполагаемых положений p заполняют значениями 1/npart.
5. Вычисляют вектор с [c1..cnpart] который содержит кумулятивную функцию вероятностей p.
6. Вычисляют стартовое положение как математическое ожидание всех предполагаемых положений.
Затем подводный робот начинает выполнение миссии. Через передатчик навигационных сигналов 6 излучают навигационный сигнал. Этот сигнал принимается приемником 3, который вычисляет время распространения и выделяет данные о координатах маяка, передавая полученную информацию в вычислитель 2. Бортовая навигационная система 1 непрерывно снабжает блок 2 данными о курсе и скорости.
Внутри блока вычисления позиции 2 выполняют следующий алгоритм:
Шаг первый: ресемплинг. Каждое предполагаемое положение 1..npart заменяют новым:
a) Генерируют случайное число r в диапазоне [0..1] по равномерному закону
b) Производят поиск первого элемента с [c1..cnpart] удовлетворяющего условию:

с) Координаты нового предполагаемого положения принимают (xp(i), yp(i))
Шаг второй. Детерминированный сдвиг:
a) Производят детерминированный сдвиг предполагаемых положений:
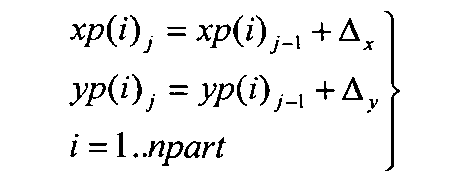
где xp(i)j-1, yp(i)j-1 - координаты i-го предполагаемого положения; Δ это смещение, которое рассчитывается по формуле:
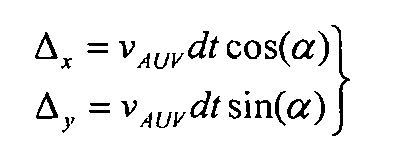
где νAUV - скорость подводного робота; dt - время, прошедшее между двумя событиями (начало движения, прием навигационного сигнала); α - курс подводного робота.
b) Производят случайный сдвиг:
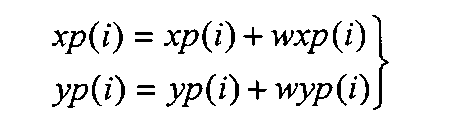
где wxpi - случайная величина, сгенерированная по нормальному закону с математическим ожиданием xpi и среднеквадратическим отклонением sigma (выбирается в зависимости от предполагаемых ошибок измерений курса и скорости подводного робота); wypi - случайная величине, сгенерированная по нормальному закону с математическим ожиданием ypi и среднеквадратическим отклонением sigma (выбирается в зависимости от предполагаемых ошибок измерений курса и скорости подводного робота).
Шаг третий. Формирование оценки координат подводного робота:
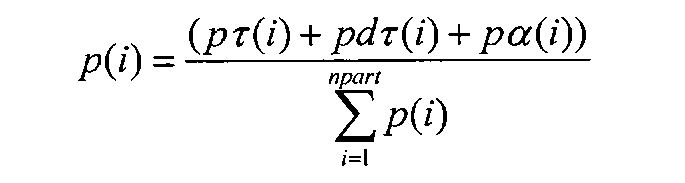
а) Производят пересчет массива вероятностей предполагаемых положений p [p1..pnpart]. Вероятность рассчитывается относительно следующих параметров:
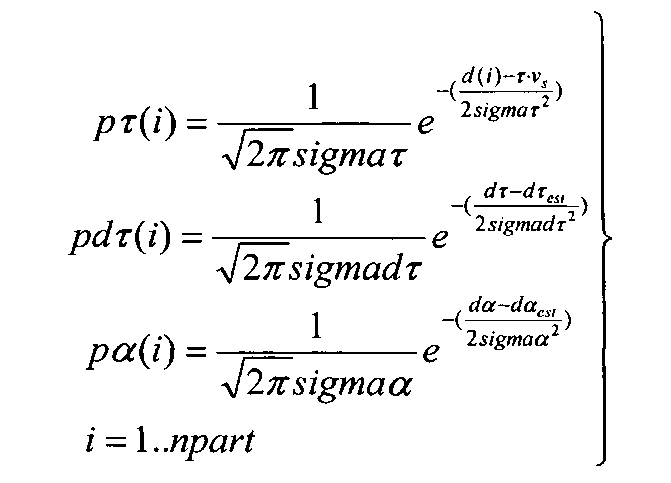
где pτ(i) - вероятность относительно измеренного времени распространения для i-го предполагаемого положения; pdτ(i) - вероятность относительно изменения времени распространения для i-го предполагаемого положения; pα(i) - вероятность относительно изменения направления движения для i-го предполагаемого положения; d(i) - расстояние между i-м предполагаемым положением и опорным маяком; vs - скорость звука в воде; τ - измеренное время распространения; sigmaτ - коэффициент среднеквадратического отклонения по τ; dτ - изменение измеренного времени распространения относительно предыдущего события; dτest - изменение вычисленного времени распространения относительно предыдущего события; sigmadτ - коэффициент среднеквадратического отклонения по dτ; dα - изменение измеренного времени распространения относительно предыдущего события; dαest - изменение вычисленного времени распространения относительно предыдущего события; sigmadα - коэффициент среднеквадратического отклонения по dα;
b) Оценивают координаты подводного робота как математическое ожидание всех предполагаемых положений:
с) Производят пересчет кумулятивной функции вероятностей p - вектор с [c1..cnpart].
К полученной оценке добавляют данные о глубине подводного робота. Эта информация поступает в передатчик 4, затем по гидроакустическому каналу в приемник 5. Аппаратура 7 осуществляет передачу навигационной информации по проводной или беспроводной линии связи на обеспечивающее судно или береговой пункт управления.
Таким образом, заявленный способ навигации подводного робота с использованием одномаяковой системы обладает следующими преимуществами:
- Высокая надежность. Способ не требует начальной установки координат старта на борту подводного робота, что позволяет эксплуатировать робот без аварийных всплытий, вызванных потерей навигации.
- Сохранение уровня точности определения координат на протяжении всей миссии подводного робота. В способе не используется система счисления пути, главный недостаток которой накопление ошибки.
- Универсальность. Благодаря упрощенной структуре способ может быть использован для навигации любых подводных роботов, оснащенных гидроакустической приемо-передающей аппаратурой, путем простой программной (если позволяю вычислительные ресурсы робота) или программно-аппаратной модернизации.
- Мобильность. Для навигации подводного робота требуется только установка одного гидроакустического маяка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ НАВИГАЦИИ АВТОНОМНОГО ПОДВОДНОГО РОБОТА | 2013 |
|
RU2524052C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
Изобретение относится к области гидроакустических навигационных систем и может быть использовано для мобильного навигационного обеспечения подводных роботов, в том числе работающих в ледовых условиях. Технический результат - расширение функциональных возможностей. Для этого в процессе навигации подводного робота используется один опорный гидроакустический маяк, координаты которого уточняют средствами спутниковых систем навигации и передают по гидроакустическому каналу на борт подводного робота, по ходу движения которого производят измерения скорости, курса и глубины, с использованием соответствующих датчиков принимают навигационные сигналы, излучаемые опорным гидроакустическим маяком, измеряют время распространения сигнала от маяка до подводного робота; на борту подводного робота инициализируют набор предполагаемых положений: точек, географические координаты которых равномерно разбросаны вокруг области погружения; изначально каждое положение считают равновероятным; количество предполагаемых положений выбирают исходя из вычислительных возможностей аппаратуры подводного робота и требуемого уровня точности определения местоположения; в момент приема подводным роботом навигационного сигнала от опорного маяка производят детерминированный сдвиг каждого предполагаемого положения. 1 ил.
Способ навигации подводного робота с использованием одномаяковой системы, заключающийся в использовании одного опорного гидроакустического маяка, координаты которого уточняют средствами спутниковых систем навигации и передают по гидроакустическому каналу на борт подводного робота, по ходу движения которого производят измерения скорости, курса и глубины, с использованием соответствующих датчиков принимают навигационные сигналы, излучаемые опорным гидроакустическим маяком, измеряют время распространения сигнала от маяка до подводного робота; отличающийся тем, что на борту подводного робота инициализируют набор предполагаемых положений: точек, географические координаты которых равномерно разбросаны вокруг области погружения; изначально каждое положение считают равновероятным; количество предполагаемых положений выбирают исходя из вычислительных возможностей аппаратуры подводного робота и требуемого уровня точности определения местоположения; в момент приема подводным роботом навигационного сигнала от опорного маяка производят детерминированный сдвиг каждого предполагаемого положения в соответствии с данными курса и скорости относительно предыдущего события (начало движения, прием навигационного сигнала); дополнительно к детерминированному сдвигу добавляют нормально распределенное случайное смещение, параметры которого равны оценочным параметрам ошибки измерения скорости и курса; производят пересчет вероятностей каждого предполагаемого положения согласно измерительным данным о курсе, скорости и времени распространения; вычисляют как математическое ожидание всех предполагаемых положений итоговую оценку координат подводного робота; добавляют к результату информацию о глубине подводного робота; формируют новый набор предполагаемых положений в зависимости от новых значений вероятностей; передают по гидроакустическому каналу данные, полученные на борту подводного робота, содержащие оценку его координат в составе обратного навигационного сигнала, на опорный гидроакустический маяк, затем по проводной или беспроводной линии связи на обеспечивающее судно или береговой пункт управления, где отображают траекторию движения подводного робота в реальном масштабе времени.
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |

