Область техники, к которой относится изобретение
Настоящее изобретение относится к системе и способу географического и пространственного позиционирования. Изобретение обеспечивает возможность определения местоположения, траектории и уравнения движения платформы (носителя), находящейся в различных и отдельных местах в космосе, например искусственного спутника, и в то же самое время определения местоположений объектов, находящихся на земле или в пространстве, на основании концепции корреляции между разностями времен прохождения радиосигналов, которые ретранслируются космической платформой, путем использования геодезических опорных пунктов на поверхности земли. В изобретении исключена любая обработка на борту спутника, необходимы простые обнаружители (детекторы) и процессоры на объектах, местоположения которых должно быть определено. В результате одна и та же космическая платформа может быть использована для передачи данных о местоположении объектов.
Предшествующий уровень техники
Системы и способы для определения местоположений на поверхности земли для топографии или навигации разрабатывались на протяжении столетий с использованием технологий и вычислительных ресурсов, доступных на тот момент времени. Значительный технологический прогресс, достигнутый в последнем столетии, обеспечил возможность внедрения систем со значительно усложненными инструментальными средствами, таких как усовершенствованные теодолиты, более точные часы, при использовании уточненных сведений относительно небольших отклонений во вращении Земли, с особым упором на способы дистанционного определения путем использования электромагнитных волн, особенно в радиодиапазонах инфракрасных лучей и визуального контакта.
На больших расстояниях, например от сотен до тысяч километров, невозможно установить непосредственный визуальный контакт между опорным пунктом и объектами, местоположение которых должно быть определено. Были разработаны новые технологии для дистанционных географических определений местоположений объектов на поверхности Земли и в ее атмосфере. В случае подвижных объектов можно определять их перемещения и осуществлять удаленную навигацию.
Между 1950 и 1980 годами применялись системы географического позиционирования, в которых использовалась передача очень длинных радиоволн, излучаемых на очень низких частотах (очень низкая частота обычно означает диапазон 10-30 кГц) или на низких частотах (низкая частота обычно составляет около 100 кГц) передатчиками, находящимися в точно определенных геодезических местах и образующими системы, известные как «Омега» и «Лоран С». Эти сети охватывали весь мир, обеспечивая возможность приближенного определения местоположения для наземной, морской и воздушной навигации, при этом достигалась точность 5-15 км на расстояниях тысяч километров от неподвижных передатчиков. Точность способа с использованием очень низких частот и низких частот зависит от времени суток, от времени года и от солнечной и геомагнитной активностей. Такие способы ограничены только определением местоположения, при этом необходимы другие средства связи для передачи данных местоположения на центральные станции, на которых информация обрабатывается для контроля и навигации. Имеется несколько библиографических источников, в которых описаны эти системы и способы, например: Watt A.D. “VLF radio engineering”, Pergamon Press, Oxford, England, 1967; статьи: Jones T.B. “The propagation of low and very low frequency radio-waves”, NATO/AGARD Lecture Series No. 93, USA, 1978 и Herbert N.F. “Omega navigation system user's guide”, document of US Navy, Washington, DC, USA, 1978.
Начиная с восьмидесятых годов внедряются новые системы географического позиционирования с использованием радиоволн и искусственных спутников. Одна из таких систем основана на сравнении изменения частоты, известного как эффект Доплера, радиопередач, осуществляемых объектом или платформой, местоположение которой должно быть определено и движение которой обусловлено движением спутника относительно объекта, с эффектами Доплера передач из опорных пунктов, местоположения которых на земле известны. В системе используются низкоорбитальные спутники, а для определения местоположения объекта необходимо обрабатывать набор эффектов Доплера. Для каждого определения необходимо выполнять несколько измерений при различных положениях спутника. Для сообщения пользователю местоположений, обработанных в центральном пункте, необходимо использовать независимую систему связи. Точность составляет порядка метров или, даже лучше, порядка сантиметров. Известно большое количество публикаций, где раскрыт этот способ локализации, например, Kouba J. “A review or geodetic and geodynamic satellite Doppler positioning”, in “Navigation: Land, sea air & space”, published by M. Kayton, IEEE Press, New York, USA, 1990, p.44, и другие публикации применительно к спутниковой системе «Арго», услуги которой спонсируются Космическим агентством Франции, Национальным центром космических исследований и космическими агентствами США, Национальным управлением по аэронавтике и космическому пространству и Национальной администрацией по океану и атмосфере, описанной в ARGOS User's Manual, Service Argos Inc., www.argosinc.com, а также применительно к спутниковой системе «ДОРИС», описанной, например, в ежегоднике по связи, навигации и наблюдению, в связи с событием, названным днями «Дорис», которое происходило в Тулузе, Франция, 2-3 мая 2000 г, в P. Vincent et al., “Impact of the Doris precise orbit determination system on climate change studies”, 52nd International Astronautic Congress, Toulouse, France, October 1-5, 2001, или на странице Интернета: http://www.aviso.cls.fr/html/faq/doris_uk.html.
В настоящее время широко используется другая система позиционирования, которая основана на триангуляции по радиосигналам от нескольких спутников, которые одновременно располагаются выше линии горизонта, эфемериды и местоположения которых хорошо известны и постоянно обновляются. Наиболее удачной и хорошо известной системой является система глобального позиционирования GPS (Джи-пи-эс) министерства обороны США, которая состоит из 27 спутников, обращающихся по орбите с 12-часовым орбитальным периодом. Объекты являются пассивными, только принимающими сигналы от различных спутников, обрабатывающими с помощью установленных программ их местоположения совместно с данными эфемерид спутников. Точность составляет от метров до нескольких сантиметров, при военных применениях даже всего доли сантиметра. Для передачи данных местоположения внешнему пользователю необходимо использовать другие независимые сети связи. Имеется много библиографических источников относительно этой системы, особенно следует выделить Wells D. “Guide to GPS positioning”, Canadian GPS Association, N. Brunswick, Canada, 1987; Cariveau B.K. and Therkelsen K.L. “Satellite data management in DoD NAVSTAR GPS receivers”, in “Navigation: Land, sea, air & space”, published by M. Kayton, IEEE Press, New York, USA, 1990, p.120; Teasey S.P., et al. in “Navigation: Land, sea, air & space”, published by M. Kayton, IEEE Press, New York, USA, 1990, p.131; “The global positioning system - GPS primer”, by The Aerospace Corporation, Los Angeles, CA, USA, August 1997. Упомянутые выше сети и способы, в которых используются спутники для географического позиционирования, контролируются государственными агентствами или крупными компаниями, которые используют очень усложненные спутники, примером являются системы с использованием эффекта Доплера и очень сложных спутников, такие как «Навстар» из группы систем глобального позиционирования. Для этих вариантов требуются независимые системы для передачи данных местоположения и навигационных данных на управляющие или контролирующие центральные станции. Затраты на независимые услуги связи составляют значительную часть общего бюджета эксплуатационных расходов на указанные системы.
Предлагалась альтернативная система определения географического местоположения на Земле с использованием радиосигналов, излучаемых из опорных пунктов и с объектов на Земле и ретранслируемых в пространстве недолговечными отражателями, такими как ионизированные следы метеоров в атмосфере Земли (см., например, патент Бразилии PI 9101270-8 (Kaufmann Pierre) от 25 марта 1991 г, и дополнительное свидетельство С19101270-8 от 17 мая 2002 г), где отражения сигналов в пространстве направляются на трансиверы любого типа, переносимые летательными аппаратами, воздушными шарами или спутниками.
Однако в указанном изобретении требуются передачи в, по меньшей мере, двух опорных пунктах, в описании не предусмотрены и не описаны способы и этапы, которые необходимы для определения географического местоположения. Кроме того, невозможно получить частичное или полное определение траектории или орбиты устройства, которое является отражающим или ретранслирующим сигналы в космосе.
Изложение существа изобретения
Технической задачей настоящего изобретения является создание способа и системы географического и пространственного позиционирования, которые обеспечивают возможность определения местоположений, траекторий или орбит космических платформ.
Дополнительной задачей настоящего изобретения является создание системы и способа, которые обеспечивают также возможность определения географической или пространственной локализации объектов на поверхности Земли или над ней.
Раскрытие изобретения
Поставленная задача решена путем создания системы географического и пространственного позиционирования, содержащей
первый, второй и третий опорные пункты, которые являются неподвижными относительно Земли, но расположены на расстоянии друг от друга и не находятся на одной линии относительно друг друга, при этом каждый опорный пункт имеет заранее известное место,
космическую платформу, видимую из неподвижных опорных пунктов, которая перемещается в последовательные положения в зависимости от времени в соответствии с траекторией, которая наклонена относительно оси вращения Земли,
передатчик, оперативно связанный с каждым из узлов, задаваемых неподвижными опорными пунктами и космической платформой, и предназначенный для излучения импульсов на определенной частоте, при этом каждый импульс излучается в заранее определенный момент времени,
приемник, оперативно связанный с каждым неподвижным опорным пунктом и с передатчиком и предназначенный для приема указанных импульсов на траектории, охватывающей расстояние между космической платформой и неподвижным опорным пунктом, связанным с приемником,
управляющий блок, оперативно соединенный с передатчиком и с приемником и предназначенный для вычисления в момент излучения каждого импульса боковых ребер четырехгранника, вершины которого задаются тремя неподвижными опорными пунктами и космической платформой, на основании определения времени прохождения каждого импульса по указанной траектории между космической платформой и каждым неподвижным опорным пунктом, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы, когда последняя является видимой для неподвижных опорных пунктов.
Настоящая система дополнительно содержит на объекте, географическое местоположение которого должно быть определено и относительно которого космическая платформа является видимой, приемник, принимающий импульсы, излученные передатчиком и ретранслированные космической платформой, при этом приемник оперативно связан с управляющим блоком, предназначенным для вычисления прямолинейного сегмента, соединяющего объект и космическую платформу, для определения местоположения объекта с помощью последовательного пересечения нескольких сферических геометрических мест точек, каждое из которых представлено сферой, и, по меньшей мере, три из указанных сфер в определенный момент времени обозначают центр на космической платформе и радиус, соответствующий прямолинейному сегменту, задаваемому между указанной космической платформой и объектом, а число пересечений сферических геометрических мест точек является достаточным для определения единственной точки, характеризующей местоположение объекта.
Точность локализации объектов, получаемая с помощью настоящей системы, сравнима с точностью, получаемой с помощью других систем с использованием спутников, достигая 10 м вначале и улучшаясь до 1 м и менее, по мере того, как траектория используемой космической платформы постепенно определяется более точно благодаря большему числу определений, которые выполняются при использовании системы, описанной в настоящей заявке.
Согласно настоящему изобретению предложен способ географического и пространственного позиционирования, содержащий этапы, на которых
(а) предусматривают первый, второй и третий опорные пункты, которые являются неподвижными относительно Земли и расположены на расстоянии друг от друга и не находятся на одной линии относительно друг друга, при этом каждый имеет заранее известное место,
(b) используют космическую платформу, видимую для неподвижных опорных пунктов, которая перемещается в последовательные положения в зависимости от времени в соответствии с траекторией, которая наклонена относительно оси вращения Земли,
(с) используют передатчик, оперативно связанный с каждым из узлов, задаваемых неподвижными опорными пунктами и космической платформой, для излучения импульсов на определенной частоте, при этом каждый импульс излучается в заранее определенный опорный момент времени,
(d) используют приемник, оперативно связанный с каждым неподвижным опорным пунктом и с передатчиком, для приема указанных импульсов на траектории, охватывающей расстояние между космической платформой и неподвижным опорным пунктом, связанным с приемником,
(e) используют управляющий блок, оперативно связанный с передатчиком и с приемником для вычисления для момента излучения каждого импульса боковых ребер четырехгранника, вершины которого задаются тремя неподвижными опорными пунктами и космической платформой, на основании определения времени прохождения каждого импульса по указанной траектории между космической платформой и каждым неподвижным опорным пунктом, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы в то время, когда последняя является видимой для неподвижных опорных пунктов.
Для определения местоположения объекта способ географического и пространственного определения содержит дополнительные этапы, на которых на объекте используют приемник, оперативно связанный с передатчиком для приема указанных импульсов на траектории, охватывающей расстояние между космической платформой и указанным объектом, управляющий блок, предназначенный для вычисления прямолинейного сегмента, который соединяет объект с космической платформой, для определения местоположения объекта с помощью последовательного пересечения нескольких сферических геометрических мест точек, каждое из которых представляет сферу, и, по меньшей мере, три из указанных сфер в определенный момент времени обозначают центр на космической платформе и радиус, соответствующий прямолинейному сегменту, задаваемому между указанной космической платформой и объектом, а некоторое количество пересечений сферических геометрических мест точек является достаточным для определения единственной точки, характеризующей местоположение объекта.
В настоящем изобретении раскрыты операции, которые необходимы для исключения неопределенностей, присущих известным системам определения географического местоположения, путем использования отражателей или преобразователей в космосе, и эти операции могут быть распространены на объекты, расположенные над поверхностью Земли.
Если необходимо, та же самая космическая платформа, что и используемая для нахождения местоположений на Земле и в пространстве, также может быть использована для связи и передачи данных между объектами, между объектами и станцией обработки данных местоположения и наоборот, допускается вариант ее полной автономности, то есть без обязательной зависимости от других средств связи.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на прилагаемые чертежи, на которых
фиг. 1 изображает общий вид сечения поверхности Земли, представленного сферическим трехгранником, и космической платформы с показом дистанционных связей между ними и между центром Земли и геометрических мест точек объектов, находящихся на и выше сферической поверхности Земли, положение которых должно быть определено согласно изобретению;
фиг. 2 - схему диаметрального сечения Земли в области, где расположена космическая платформа, показаны на поверхности Земли и в пространстве геометрические места точек объектов, предназначенных для нахождения их местоположений согласно изобретению;
фиг. 3 - схему части траектории космической платформы и локализации геометрических мест точек объектов, находящихся на и выше поверхности Земли согласно изобретению;
фиг. 4 - блок-схему системы согласно изобретению.
Описание предпочтительного варианта осуществления изобретения
Согласно настоящему изобретению система (фиг. 1) содержит, по меньшей мере, три опорных пункта, которые являются неподвижными относительно Земли и расположены, например, на поверхности ее, т.е. первый опорный пункт А, второй опорный пункт В и третий опорный пункт С, которые расположены на расстоянии друг от друга и не находятся на одной линии относительно друг друга, и при этом каждый пункт имеет свое соответствующее, точно определенное географическое местоположение. Указанная система также содержит космическую платформу S, видимую для первого, второго и третьего неподвижных опорных пунктов А, В, С, которая перемещается в последовательные положения в зависимости от времени в соответствии с траекторией, которая наклонена относительно оси вращения Земли. Система содержит также передатчик 1, оперативно связанный с каждым из узлов, задаваемых первым, вторым и третьим опорными пунктами А, В, С и космической платформой S, и предназначенный для излучения импульсов на определенной частоте, при этом каждый импульс излучается в заранее определенный опорный момент времени, и приемник 2, оперативно связанный с каждым неподвижным опорным пунктом А, В, С и с передатчиком 1 для приема указанных импульсов на траектории, охватывающей расстояние между космической платформой S и неподвижным опорным пунктом А, В, С, связанным с приемником 2. Имеется также управляющий блок 3, оперативно связанный как с передатчиком 1, так и с приемником 2, для вычисления для момента излучения каждого импульса боковых ребер четырехгранника, вершины которого задаются тремя неподвижными опорными пунктами А, В, С и космической платформой S, на основании определения времени прохождения каждого импульса по указанной траектории между космической платформой S и каждым неподвижным опорным пунктом А, В, С, чтобы обеспечивать возможность определения соответствующего продолжения траектории космической платформы S в то время, когда последняя является видимой для неподвижных опорных пунктов А, В, С.
Передача из неподвижных опорных пунктов А, В, С на космическую платформу S происходит, например, в радиоволновом диапазоне и может осуществляться на одной и той же частоте или на различных частотах, несущих данные в кодированном виде.
В структурном варианте настоящего изобретения первый неподвижный опорный пункт А содержит передатчик 1, а каждый из первого, второго и третьего неподвижных опорных пунктов А, В, С снабжен соответствующим приемником 2 и, например, соответствующими точными часами 4, при этом часы синхронизированы с другими часами.
В этой конструкции передатчик 1 излучает импульсы на определенной частоте, каждый импульс излучается в заранее определенный опорный момент времени и содержит идентификационный признак первого неподвижного пункта А и момент излучения указанного импульса, при этом каждый импульс передается на все неподвижные опорные пункты, А, В, С с помощью устройства 5 связи, предусмотренного на космической платформе S.
В еще одном варианте осуществления настоящего изобретения второй неподвижный опорный пункт В снабжен другим передатчиком, импульсы которого принимаются другим приемником, предусмотренным на третьем неподвижном опорном пункте С. В этом варианте осуществления, например, первый неподвижный опорный пункт А не снабжен приемниками.
В этом варианте осуществления передатчик, установленный во втором неподвижном опорном пункте В, излучает импульсы на определенной частоте, при этом каждый импульс излучается в один и тот же заранее определенный опорный момент времени относительно каждого импульса, излучаемого передатчиком 1, предусмотренным на первом неподвижном опорном пункте А, и содержит идентификационный признак второго неподвижного опорного пункта В и момент излучения указанного импульса. В этом случае другой приемник, предусмотренный в третьем неподвижном опорном пункте С, принимает и идентифицирует импульсы, посылаемые вторым неподвижным опорным пунктом В и передаваемые космической платформой S, а управляющий блок вычисляет для момента излучения каждого импульса из первого и второго неподвижных опорных пунктов А, В боковые ребра четырехгранника с тремя вершинами, задаваемыми тремя неподвижными опорными пунктами А, В, С, и четвертой вершиной, задаваемой космической платформой S, на основании разностей времен между моментом излучения импульса из первого неподвижного опорного пункта А и его приемом в последующих, во втором и третьем неподвижных опорных пунктах В, С соответственно, и по разности времен между излучением импульса из второго неподвижного опорного пункта В и его приемом в третьем неподвижном опорном пункте С, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы S в то время, когда она является видимой для неподвижных опорных пунктов.
В структурном варианте настоящего решения устройство 5 связи представлено трансивером.
Поскольку в зависимости от смещения космической платформы S неподвижные опорные пункты могут занимать различные положения в качестве первого, второго и третьего неподвижного опорного пункта, в способе осуществления настоящего изобретения все неподвижные опорные пункты А, В, С снабжены одинаковыми элементами.
С помощью указанной системы позиционирования можно определять продолжения траектории космической платформы S в то время, когда она является одновременно видимой для каждого из трех неподвижных опорных пунктов А, В, С, а также уравнение движения указанной космической платформы S.
Согласно варианту воплощения настоящего изобретения (фиг. 4) каждый из первого, второго и третьего неподвижных опорных пунктов А, В, С имеет соответствующий вспомогательный управляющий блок 3, задающий соответствующее устройство связи, описанное ниже, который вычисляет указанные разности времен. Каждый управляющий блок 3 считывает показания соответствующих точных часов 4, управляет и координирует вывод информации на средство связи и запоминает, сравнивает и обрабатывает данные, принимаемые приемниками 2 соответствующих неподвижных опорных пунктов А, В, С. В этом варианте осуществления также предусмотрен центральный управляющий блок 3, который принимает данные из неподвижных опорных пунктов А, В, С.
Помимо определения продолжений траектории космической платформы S система согласно изобретению обеспечивает возможность определения географического и пространственного местоположения объектов 7, относительно которых космическая платформа является видимой.
Для такого определения местоположения каждый объект Р содержит приемник 2, принимающий импульсы, излучаемые передатчиком 1 и ретранслированные с помощью космической платформы S, и в рабочем состоянии соединенный с управляющим блоком 3, который вычисляет для каждого импульса, принятого от передатчика 1, прямолинейный сегмент, соединяющий космическую платформу S с объектом Р, чтобы обеспечивать возможность определения местоположения объекта Р с помощью последовательных пересечений нескольких сферических геометрических мест LE точек. При этом каждое геометрическое место точек представлено сферой, и, по меньшей мере, три из указанных сфер в определенный момент времени обозначают центр на космической платформе S и радиус, соответствующий прямолинейному сегменту, задаваемому между космической платформой S и объектом Р. Число пересечений сферических геометрических мест LE точек является достаточным для определения единственной точки, характеризующей местоположение объекта Р.
Согласно системе настоящего изобретения сферические геометрические места LE (фиг. 2) точек должны быть в количестве, достаточном для того, чтобы они задавали окружность при первом пересечении, две точки на этой окружности при втором пересечении и единственную точку, расположенную в пространстве при третьем пересечении, и эта точка точно обозначает местоположение соответствующего объекта Р.
Согласно настоящему изобретению географическое и пространственное позиционирование достигается в соответствии со способом, описываемым ниже.
Согласно одному способу осуществления настоящего изобретения в начальный и определенный момент или в опорный момент времени первый опорный пункт А передает, например, с помощью импульса свой идентификационный признак, кодирующий его передачу.
Этот импульс принимается устройством 5 связи, предусмотренным на космической платформе S, которая ретранслирует его к неподвижным опорным пунктам и к каждому объекту Р на той же самой частоте или на других частотах. Импульс, сформированный в неподвижном опорном пункте А и ретранслированный устройством 5 связи, принимается первым, вторым и третьим неподвижными опорными пунктами А, В, С.
Для примера, центральный управляющий блок 3 (фиг. 4) сравнивает первое опорное время, принятое из первого неподвижного опорного пункта А, с текущим временем в соответствующих неподвижных опорных пунктах А, В, С, определяя разности времен, соответствующие времени прохождения импульса первого неподвижного опорного пункта А, ретранслированного космической платформой S, к первому, ко второму и к третьему неподвижным опорным пунктам А, В, С. Три разности времен, относящиеся к соответствующим временам прохождения, обеспечивают возможность определения указанного четырехгранника с вершинами на космической платформе S и на трех неподвижных опорных пунктах А, В, С на Земле.
В другой структуре в каждое то же самое опорное время второй неподвижный опорный пункт В одновременно излучает импульс, который кодирован временем его излучения и идентификационным признаком указанного второго неподвижного опорного пункта В. Эти импульсы принимаются устройством 5 связи, предусмотренным на космической платформе S, которая ретранслирует их к неподвижным опорным пунктам и объектам 7 на тех же самых или на других частотах. Кодированные импульсы, поступившие из первого неподвижного опорного пункта А и ретранслированные устройством 5 связи, принимаются вторым и третьим неподвижными опорными пунктами В, С.
Для примера, центральное управляющее устройство 3 сравнивает первое опорное время, принятое из первого неподвижного опорного пункта А, с текущим временем в соответствующих неподвижных опорных пунктах В, С, определяя разности времен, соответствующие времени прохождения импульса от первого неподвижного опорного пункта А, ретранслированного космической платформой S, до второго и третьего неподвижных опорных пунктов В, С. Третий неподвижный опорный пункт С принимает импульс из второго неподвижного опорного пункта В, ретранслированный космической платформой S, при этом указанная информация отправляется в управляющий блок 3, который сравнивает первое опорное время, принятое из второго неподвижного опорного пункта В, с текущим временем в третьем неподвижном опорном пункте С, определяя разность времен, соответствующую времени прохождения импульса второго неподвижного опорного пункта В, ретранслированного космической платформой S, до третьего неподвижного опорного пункта С. Три разности времен, относящиеся к соответствующим временам прохождения, обеспечивают возможность определения четырехгранника с вершинами на космической платформе S и в трех неподвижных опорных пунктах на Земле.
Решение четырехгранника при известности всех его ребер обеспечивает возможность определения высоты космической платформы S по кодированным моментам времени в импульсах, которые излучаются в начальный момент времени и передаются первым неподвижным опорным пунктом А и вторым неподвижным опорным пунктом В относительно плоскости, задаваемой тремя неподвижными опорными пунктами, расположенными, например, на Земле. Высоту космической платформы S относительно поверхности или центра Земли получают с помощью хорошо известных геометрических и алгебраических действий. Последовательные определения местоположений космической платформы S в последовательные моменты времени обеспечивают возможность определения ее траектории или ее орбиты, когда указанная космическая платформа S представляет собой искусственный спутник.
Что касается определения местоположения каждого объекта Р, расстояние, подсчитанное между космической платформой S и каждым объектом Р по импульсам, переданным в определенный начальный момент времени, задает геометрическое место точек в пространстве, представляемое сферой с центром на космической платформе S, поверхность которой содержит объект Р и пересекает поверхность Земли, которая считается приблизительно сферической, с радиусом кривизны, известным для района, где выполняют измерения, задающим окружность на ее поверхности. Однозначного определения местоположения каждого объекта Р достигают, осуществляя последовательные измерения в различные моменты времени, предпочтительно в короткой последовательности, создавая смещенные геометрические места точек, пересечения которых будут задавать только одну точку, которая будет местоположением определяемого объекта Р. Это однозначное решение возможно только при условии, что траектория космической платформы S не представляет собой прямую линию в пространстве и что ее проекция на поверхность Земли не является прямолинейной.
Система и способ настоящего изобретения обеспечивают возможность определения траектории или орбиты космической платформы S и ее уравнения движения, а также обеспечивают возможность определения местоположения каждого объекта Р без необходимости повторной обработки данных из опорных неподвижных пунктов при каждом определении.
Инструментальные систематические временные задержки могут быть вызваны, например, трансивером космической платформы S при ретрансляции опорных импульсов, посылаемых неподвижными опорными пунктами, или остаточными эффектами при прохождении. Эти задержки могут вызывать отклонения во временах прохождения, которые могут быть определены путем использования четвертого опорного неподвижного пункта (не показан) с точно известным геодезическим местоположением. В этом случае систематические временные задержки, подлежащие определению, получают путем выполнения процедур, описанных выше, для опорного объекта Р с известным местоположением.
В зависимости от усиления и мощности трансиверов позиционирование может быть распространено на объекты, находящиеся на расстояниях от сотен до тысяч километров от платформы.
Результаты измерений, получаемые при определении местоположений объектов 7, могут быть обработаны в центральном управляющем блоке 3, который получает указанные результаты измерений с помощью средства связи или транспортировки данных. Когда траектория и уравнение движения космической платформы S адекватно установлены путем использования системы и способа, описываемого в настоящей заявке, обработка данных для определения местоположений может быть осуществлена, например, на самом объекте Р посредством управляющего блока 3, предусмотренного на нем. В другом варианте осуществления настоящего изобретения используют ретрансляцию импульсов, принятых из опорных неподвижных пунктов объектами 7, их местоположения могут быть определены дистанционно, и в этом случае, чтобы иметь определенное местоположение объекта, после нахождения уравнения движения космической платформы S и времени связи между объектом и управляющим блоком 3, удаленным от этого объекта Р, обходятся без использования точных часов и сравнения времен на объектах 7.
На фиг. 1 показано сечение поверхности Земли, характеризуемое сферическим трехгранником Т, радиус которого равен радиусу кривизны Земли, центрированным относительно О, вершины которого находятся в трех неподвижных опорных пунктах А, В и C с точно известными геодезическими местоположениями, которые задают плоскость.
На фиг. 2 показано пересечение первого сферического геометрического места LE1 точек с радиусом на космической платформе S, которое является геометрическим местом точек всех возможных решений в пространстве, центрированным относительно космической платформы S, со вторым сферическим геометрическим местом LE2 точек с радиусом в центре О Земли, и им задается первое круговое пересечение IC1, которое является геометрическим местом точек всех возможных решений на поверхности Земли.
В системе предполагается передача электромагнитных волн, например, на радиочастотах с помощью одного, двух или всех неподвижных опорных пунктов, которые ретранслируются космической платформой S и объектом Р. Радиопередачи могут быть осуществлены только на одной или на различных частотах, непрерывно или импульсами, в соответствии с выбранными технологиями для кодификации передаваемых и принимаемых данных. Эти технологии являются известными, и выбор их не является предметом настоящего изобретения.
В соответствии с одним вариантом осуществления настоящего изобретения траекторию космической платформы S определяют как функцию времени на основании определения ребер и высоты четырехгранника, описанного выше, для нескольких положений указанной космической платформы S, поскольку для каждого рассматриваемого временного интервала в настоящей системе определяется соответствующее продолжение траектории космической платформы S. В начальный и определенный момент времени, называемый в настоящей заявке t1, указанный четырехгранник имеет ребра и высоту, определяемые с помощью первого неподвижного опорного пункта А, передающего свой идентификационный код вместе с одним моментом t1(A) времени. Эти данные, переносимые модулированными сигналами или импульсами, принимают на космической платформе S, которая ретранслирует их к трем неподвижным опорным пунктам А, В, С, в которых обрабатывают разности времен между моментом прихода кодированного сигнала в момент t1(A) времени и локальным временем, показываемым часами неподвижных опорных пунктов, AA(t1), AB(t1) и AC(t1), в первом, во втором и в третьем неподвижных опорных пунктах А, В и С соответственно. Эти три разности времен посылают на управляющий блок 3, где они обрабатываются для определения ребер четырехгранника, обозначаемых как AS, BS и CS для момента t1 времени, в результате чего вычисляют высоту указанного четырехгранника, показанную (фиг. 1) сегментом SS', перпендикулярным к плоскости, содержащей неподвижные опорные пункты А, В и С. Сегмент SS' является единственным существующим решением для момента измерений, и путем его определения можно вычислить высоту космической платформы S над поверхностью Земли. Траекторию космической платформы S находят путем последовательного определения ребер и высоты новых четырехгранников, получаемых для нескольких положений космической платформы S как функции времени. При каждом измерении сегмент может быть определен путем соединения космической платформы S с объектом Р, решения для которого описывают сферическое геометрическое место точек в пространстве с центром, расположенным на космической платформе S, которое пересекает поверхность Земли, образуя окружность (фиг. 2), центрированную относительно S", и которое задает круговое пересечение, расположенное на пересечении оси, которая соединяет космическую платформу S с центром О Земли.
В начальный момент t1(A) времени импульсы, излученные первым опорным пунктом А, ретранслированные трансивером на борту космической платформы S, принимают объектом Р, на котором определяют, например, разность относительно того же самого момента AP(t1) времени, зарегистрированного точными часами 1 указанного объекта Р, до передачи этой информации в управляющий блок 3, например в центральный управляющий блок, определяющий для указанного момента t1 времени прямолинейный сегмент, соединяющий космическую платформу S с объектом Р. Определение местоположения объекта на поверхности Земли при только одном измерении создает неопределенность, объект может быть расположен в любом месте на поверхности сферы LE1 (фиг. 2) или на окружности IC1, которая является пересечением сферы с поверхностью Земли. Последовательные измерения необходимы для исключения неопределенности и однозначного определения географического места объекта Р.
На фиг. 3 приведен пример процедуры для определения географического и пространственного местоположения согласно изобретению, где для частного случая объекта Р на поверхности Земли показаны проекция моментов измерений, соответствующие положения космической платформы S, и круговые геометрические места IC точек, соответствующие пересечению прямолинейного сегмента, соединяющего объект Р и космическую платформу S с поверхностью Земли.
На фиг. 3 круговое пересечение для начального момента t1 времени представлено как IC1 в случае проекции S(t1) космической платформы S на Землю для начального момента t1 времени. Во второй момент t2 времени, предпочтительно в последующий и очень близкий к начальному моменту t1 времени, космическая платформа S перемещается в другое проекционное положение S(t2), задающее второе круговое пересечение IC2, смещенное на поверхности Земли относительно первого кругового пересечения IC1, и оно пересекает первое геометрическое место IC1 точек в двух точках. В третий момент t3 времени, предпочтительно в последующий и очень близкий ко второму моменту t2 времени, космическая платформа S перемещается в третье проекционное положение S(t3), задающее третье круговое пересечение IC3, которое пересекает предыдущее круговое пересечение IC2 только в одной из двух ранее определенных точек пересечения, однозначно определяя географическое местоположение на поверхности Земли. Для каждого момента времени определение соответствующего кругового пересечения IC получают как функцию вычисления соответствующего четырехгранника, описанного выше. Условие, необходимое для нахождения только одного решения для географического местоположения каждого объекта Р на поверхности Земли, заключается в том, что проекция траектории космической платформы S на поверхность Земли не должна быть прямолинейной. Такое условие выполняется для космических платформ S, переносимых искусственными спутниками, имеющими определенный наклон орбиты, исключая экваториальный, обусловленный результатом смещений спутника со временем и суточным перемещением Земли относительно объекта Р.
Для объектов Р, расположенных над поверхностью Земли в пространстве, при первом измерении в момент t1 времени определяют возможные местоположения на поверхности сферы, имеющей в качестве центра место нахождения космической платформы S и в качестве радиуса прямолинейный сегмент между космической платформой S и объектом Р. В этом случае, чтобы однозначно определить местоположение объекта Р в пространстве, необходимо выполнить три дополнительных последовательных измерения, подобных предшествующему измерению. Для каждого момента времени находится сферическое геометрическое место точек и круговое пересечение в пространстве, и в этом случае необходимы измерения в четвертый момент t4 времени, чтобы найти четвертую сферу, определяющую четвертое сферическое геометрическое место LG точек и четвертое круговое пересечение IC, которое пересекает предыдущее круговое пересечение IC только в одной общей точке, соответствующей местоположению объекта Р. При осуществлении этих процедур четыре положения космической платформы S не могут быть на прямой линии. Для осуществления этих определений и вычислений используют хорошо известные геометрические и алгебраические операции.
При использовании системы и способа настоящего изобретения должны быть известны систематические задержки, связанные с замерами разностей t времен, обусловленные электроникой трансивера на борту космической платформы S. С достаточной точностью эти задержки могут быть определены с помощью самой системы путем использования четвертого неподвижного опорного пункта (не показан) с точно известным геодезическим местоположением, координаты которого будут воспроизводиться в случае введения поправки на инструментальные задержки.
При известности траектории или орбиты космической платформы S и ее уравнения движения настоящими системой и способом позиционирования обеспечивается возможность осуществления варианта обработки данных на самом объекте Р для определения его местоположения.
В одном варианте выполнения настоящего изобретения определение местоположения объекта Р может быть выполнено без снабжения каждого объекта Р точными часами 4 благодаря вычислению при каждом измерении разностей продолжений траектории и местоположения платформы по известному уравнению ее движения с помощью известных математических операций путем обработки разностей времен только в центральном управляющем блоке 3 при известности зарегистрированных моментов времени передачи данных объекта Р в указанный управляющий блок 3.
На фиг. 4 приложенных чертежей показана упрощенная структурная схема размещения и функций, обеспечиваемых системой.
Для нахождения географического или пространственного местоположения с помощью системы настоящего изобретения способ позиционирования осуществляют следующим образом.
Используют первый, второй и третий неподвижные опорные пункты А, В и С, а также космическую платформу S, видимую для указанных неподвижных опорных пунктов. Эта платформа перемещается в последовательные положения относительно объекта в зависимости от времени и в соответствии с непрямолинейной траекторией относительно объекта, например наклоненной относительно оси вращения Земли.
Используют передатчик 1, оперативно связанный с одним или несколькими узлами, задаваемыми неподвижными опорными пунктами А, В, С и космической платформой S, чтобы излучать импульсы на определенной частоте, при этом каждый импульс в определенный опорный момент времени.
Используют приемник 2, оперативно связанный с каждым неподвижным опорным пунктом А, В, С и с передатчиком, чтобы принимать указанные импульсы на траектории, охватывающей расстояние между космической платформой S и неподвижным опорным пунктом А, В, С, связанным с приемником.
Используют управляющий блок 3, оперативно соединенный с передатчиком 1 и с приемником 2, чтобы для момента излучения каждого импульса вычислять каждое боковое ребро четырехгранника, имеющего три вершины, задаваемые тремя неподвижными опорными пунктами А, В, С, и четвертую вершину, задаваемую космической платформой S, на основании разностей времен прохождения каждого импульса между космической платформой S и соответствующим неподвижным опорным пунктом А, В, С, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы S в то время, когда последняя является видимой для неподвижных опорных пунктов А, В и С.
Заявленный способ содержит также следующие этапы, на которых в каждом неподвижном опорном пункте используют соответствующие точные часы 4, которые синхронизируют друг с другом по одному и тому же общему эталонному времени. При этом передатчик 1 устанавливают в первом неподвижном опорном пункте А, чтобы излучать импульсы на определенной частоте, при этом каждый импульс излучают в определенный опорный момент времени, и импульс содержит идентификационный признак неподвижного опорного пункта А и момент излучения указанного импульса. Каждый импульс передают на все неподвижные опорные пункты А, В, С посредством устройства 5 связи, размещенного на космической платформе S.
В этом случае способ дополнительно содержит следующие этапы:
размещают приемник в каждом из неподвижных опорных пунктов А, В, С, оперативно соединенный с передатчиком 1;
осуществляют прием и передачу указанных импульсов, переданных первым неподвижным опорным пунктом А с помощью устройства 5 связи, предусмотренного на космической платформе S;
осуществляют прием импульсов в первом, во втором и в третьем неподвижных опорных пунктах А, В, С, излученных первым неподвижным опорным пунктом А и переданных устройством 5 связи;
вычисляют разности времени каждого импульса, принятого в первом, во втором и в третьем неподвижных опорных пунктах А, В, С относительно времени излучения каждого импульса, излученного первым неподвижным опорным пунктом А;
осуществляют сравнение указанных разностей времен и передачу их в управляющий блок 3 с помощью второго устройства связи для данных;
определяют для момента излучения каждого импульса из первого неподвижного опорного пункта А в управляющем блоке 3 боковые ребра четырехгранника с тремя вершинами, задаваемыми тремя неподвижными опорными пунктами А, В, С, и с четвертой вершиной, задаваемой космической платформой S, на основании разностей времен между моментом излучения одного импульса из первого неподвижного опорного пункта А и приема указанного импульса в первом, во втором и в третьем неподвижных опорных пунктах А, В, С соответственно.
Согласно настоящему изобретению способ дополнительно включает в себя следующие операции:
используют прецизионные часы 4, которые устанавливают в каждом из первого, второго и третьего неподвижных опорных пунктов А, В, С;
осуществляют синхронизацию времени точных часов 4 в трех неподвижных опорных пунктах А, В, C с одним и тем же эталонным временем;
передают импульсы с помощью первого неподвижного опорного пункта А, при этом каждый импульс содержит кодированную информацию о моменте опорного излучения каждого импульса и об идентификационном признаке первого неподвижного опорного пункта А;
осуществляют прием и передачу с помощью устройства 5 связи, предусмотренного на космической платформе S, указанных импульсов, переданных первым неподвижным опорным пунктом А;
осуществляют прием в первом, во втором и в третьем неподвижных опорных пунктах А, В, С импульсов, излученных первым неподвижным опорным пунктом А и переданных устройством 5 связи;
вычисляют разности времен каждого импульса, принятого в первом, во втором и в третьем неподвижных опорных пунктах А, В, С относительно времени излучения каждого указанного импульса, излученного первым неподвижным опорным пунктом А;
сравнивают указанные разности времен и передают их в управляющий блок 3 с помощью другого устройства связи для данных;
определяют для момента излучения каждого импульса из первого неподвижного опорного пункта А в управляющем блоке 3 боковые ребра четырехгранника с тремя вершинами, задаваемыми тремя неподвижными опорными пунктами А, В, С, и с четвертой вершиной, задаваемой космической платформой S, на основании разностей времен между моментом излучения одного импульса из первого неподвижного опорного пункта А и его приема в первом, во втором и в третьем неподвижных опорных пунктах А, В, С соответственно, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы S в то время, когда последняя является видимой для неподвижных опорных пунктов.
Устройство 5 связи, предусмотренное на космической платформе S, принимает и передает указанные импульсы, переданные первым неподвижным опорным пунктом А, которые принимаются в первом, во втором и в третьем неподвижных пунктах А, В, С.
Разность времен, обработанная в каждом неподвижном опорном пункте, посылают вместе с кодом каждого неподвижного опорного пункта, например, в удаленный управляющий блок с помощью любой системы связи.
Такие этапы способа осуществляют также для объекта Р, местоположение которого хотят определить, для чего посылают данные о разностях AP(t1) времен соответственно, например, в центральный управляющий блок 3 с помощью средства связи, которое принимает импульсы с кодированными данными, идентифицирующими неподвижные опорные пункты и объект Р, а также о четырех разностях AA(t1), AB(t1), AC(t1) и AP(t1) времен, которые необходимы (фиг. 1, 2, 3), для определения трех ребер четырехгранника, соединяющих вершины при неподвижных опорных пунктах с космической платформой S, а также прямолинейного сегмента между местом расположения космической платформы S и объектом Р, положение которого должно быть определено.
Управляющий блок 3 выделяет импульсы, декодирует и обрабатывает данные при известности скорости распространения передаваемых волн, корректируя систематические задержки, обусловленные трансивером на борту космической платформы S, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы S в то время, когда она является видимой для неподвижных опорных пунктов.
Управляющий блок 3 принимает импульсы с кодированными данными, идентифицирующими неподвижные опорные пункты и объект Р, а также четыре разности AB(t1), AC(t1), AA(t1) и AP(t1) времен, которые необходимы для определения трех ребер четырехгранника, соединяющих вершины последнего с космической платформой S, а также прямолинейный сегмент между космической платформой S и объектом Р, координаты которого на поверхности Земли предполагают все решения на окружности, задаваемой пересечением конца указанного прямолинейного сегмента, центрированного относительно оси, соединяющей космическую платформу S с центром О Земли в момент t1 времени, соответствующий уравнению геометрического места IC1 точек (фиг. 3). Два дополнительных определения осуществляют в моменты t2 и t3 времени предпочтительно, чтобы они были очень близкими к первому моменту времени и после него, получая уравнения геометрических мест IC2 и IC3 точек (фиг. 3), однозначно определяющих координаты объекта Р на поверхности Земли при условии, что проекции на поверхность местоположений космической платформы S для трех моментов времени не находятся на прямой линии.
Для позиционирования объекта Р выше поверхности Земли или в космосе выполняют четвертое определение в момент t4 времени, предпочтительно после и очень близко к t3, однозначно определяя местоположение объекта Р по общему пересечению четырех сфер, соответствующих геометрическим местам точек, задаваемым в каждый из четырех последовательных моментов времени, при условии, что четыре места расположения космической платформы S не находятся на прямой линии.
Вычисления для определения координат объекта Р на основании измерений в трех или четырех различных, предпочтительно последовательных, моментах времени осуществляют управляющим блоком 3 путем использования хорошо известных алгебраических и геометрических формулировок, и может быть использована любая система координат, например, с выбором уравнения поверхности Земли, которое более приближено к геоидальной форме Земли в районах измерений.
Одновременно процедура, описанная здесь, позволяет определять траекторию космической платформы S и уравнение, которое описывает движение ее, дополнительно обеспечивая возможность определения координат объекта Р путем использования только последовательных местоположений космической платформы S, заранее известных из уравнения, которое описывает траекторию, без необходимости в операциях со вторым и третьим неподвижными опорными пунктами В и С.
Для определения местоположений путем использования космических платформ S с точно определенными траекториями с помощью способа, описанного в настоящей заявке, таких как, например, искусственные спутники, опорные неподвижные пункты на Земле, используют для первоначальных определений орбиты спутника и после этого для ее измерения, коррекции и уточнения эфемериды. В структурном варианте путем использования уравнений движения космической платформы S вычисления, необходимые для определения местоположений объектов Р, могут быть сделаны в центральном управляющем блоке 3 без использования точных часов 4 на каждом объекте Р при условии, что моменты времени, использованные для передачи данных указанных объектов 7 в управляющий блок 3, являются известными. Если только траектория и уравнение движения космической платформы S являются известными, обработку данных и определение местоположения также можно осуществлять на самих объектах 7.
В зависимости от частот, модуляций и мощностей, используемых при связи, особенно в трансивере на борту платформы и на объектах, местоположения которых должны быть определены, новые система и способ, описанные в настоящей заявке, способны обеспечить охват расстояний от сотен до тысяч километров от космической платформы S, как в космосе, так и на поверхности Земли. Географический охват может быть увеличен путем увеличения числа опорных неподвижных пунктов, базирующихся на Земле, и увеличения числа космических платформ S, разнесенных друг от друга в космосе. Например, платформа, расположенная на спутнике с низкой орбитой на высоте 400 км над поверхностью Земли, имеет максимальную линию горизонта на поверхности около 2000 км.
Оценки причин неопределенностей, относящихся к новым системе и способу, показывают, что в зависимости от точности используемых часов, знания радиуса кривизны Земли в районах измерений точности измерения высоты объекта Р и степени коррекции временных задержек, обусловленных электроникой бортового трансивера в космосе, можно получить точности порядка или не хуже 10 м. При достоверном знании траектории платформы или орбиты и уравнения движения, относящегося к искусственному спутнику, точности могут быть значительно повышены с помощью последовательных и повторяющихся измерений.
Результаты последовательных измерений могут быть получены при каждой полной работе системы в соответствии со скоростью электромагнитных волн и максимальным расстоянием объектов 7 над горизонтом от космической платформы S. Например, в случае объектов 7 на среднем расстоянии 500-1000 км от спутника для полной работы может потребоваться 10 мс. Путем добавления, например, дополнительных 10 мс для учета возможных систематических задержек, предполагаемых в электронике, и при обработках, можно ожидать, по меньшей мере, 600 определений в минуту.
Новые система и способ географического и пространственного позиционирования могут оказывать поддержку одновременно многим объектам путем использования программ цифровой связи и известных технологий электронных схем с многократным вводом и многократным выводом на одной и той же или на различных частотах передачи, а также программ выделения импульсов и декодирования. Примеры средств передачи импульсов показывают возможность оказания одновременной поддержки сотням или тысячам объектов 7 или пользователям. Разработка или усовершенствование этих технологий не является задачей изобретения.
Передатчики, приемники, модемы, часы, электроника для многократных вводов и многократных выводов данных, дискриминаторы кодов и импульсов, цифровые процессоры и их основные сервисные программы составляют технологии, имеющиеся на рынке, и не являются объектами изобретения.
Имеются альтернативные варианты использования новой системы и нового способа географического и пространственного позиционирования, осуществляемые с помощью трансляции или отражения на космических платформах S, поддерживаемых воздушными шарами и летательными аппаратами, а также с помощью отражения на естественных препятствиях в верхних слоях атмосферы Земли, таких как ионосферные неоднородности и ионизированные следы, создаваемые метеорами, посредством измерений, выполняемых в различных местах в пространстве, при условии, что проекция их перемещений на поверхность не является прямолинейной.
Для передачи данных по радиоканалу с помощью инфракрасных лучей путем оптического контакта и т.д. могут быть использованы различные диапазоны электромагнитного спектра.
Связь опорных неподвижных пунктов А, В, С и объектов с центральным процессором также может осуществляться с помощью любой линии связи, такой как волоконно-оптическая или радиотехническая линия связи. Данные о местоположении могут быть обработаны сразу же, в реальном времени, или спустя длительное время после выполнения измерений.
Вследствие простоты новой системы, для которой требуется относительно простая технология, а также наличия нескольких вариантов обработки и средств передачи данных, использование описанного в настоящей заявке изобретения способствует заметному снижению затрат при инвестициях благодаря применению небольшой платформы, несущей только один трансивер, наземных устройств небольшой сложности и автономных систем энергоснабжения без зависимости от других систем, в которых используются громоздкие платформы, несущие сложные приборы для бортовой и удаленной обработки, или несколько платформ на больших расстояниях от Земли со сложными бортовыми приборами, которые зависят от отдельного средства для передачи вычисленных данных о местоположении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| Способ определения местоположения объекта навигации | 2024 |
|
RU2824861C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УДАЛЕННОГО ОБЪЕКТА, СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ И ИНТЕГРИРОВАННАЯ СИСТЕМА, ОСУЩЕСТВЛЯЮЩАЯ ЭТИ СПОСОБЫ | 1993 |
|
RU2128884C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы | 2023 |
|
RU2825760C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
Изобретение относится к радиотехнике и может быть использовано для определения местоположения на поверхности Земли и навигации. Технический результат состоит в обеспечении полного определения траектории. Система содержит первый, второй и третий опорные пункты (А, В, С), которые являются неподвижными относительно Земли, расположены на расстоянии друг относительно друга и не находятся на одной линии. Космическая платформа (S) видима из неподвижных пунктов (А, В, С). По меньшей мере, один объект (Р) находится выше или на поверхности Земли. Передатчик (1) оперативно связан с каждым из узлов, задаваемых неподвижными опорными пунктами (А, В, С) и космической платформой (S), для излучения импульсов на определенной частоте каждый из которых излучается в заранее определенный момент времени. Приемник (2) оперативно связан с каждым неподвижным опорным пунктом (А, В, С), каждым объектом (Р) и с передатчиком (1) для приема указанных импульсов на траектории, охватывающей расстояние между космической платформой (S) и неподвижными опорными пунктами (А, В, С), связанными с приемником (2). Управляющий блок (3) оперативно соединен с передатчиком (1) и с приемником (2) для вычисления для момента излучения каждого импульса боковых ребер четырехгранника, вершины которого заданы тремя неподвижными опорными пунктами (А, В, С) и космической платформой (S). На основании определения времени прохождения каждого импульса по указанной траектории между космической платформой (S) и каждым неподвижным опорным пунктом (А, В, С) определяют соответствующее продолжение траектории космической платформы (S) во время, когда она является видимой для неподвижных опорных пунктов (А, В, С), и ее уравнение движения, что обеспечивает возможность вычисления возможных местоположений объекта (Р) в управляющем блоке (3) и на самом объекте (Р). 2 н. и 30 з.п. ф-лы, 4 ил.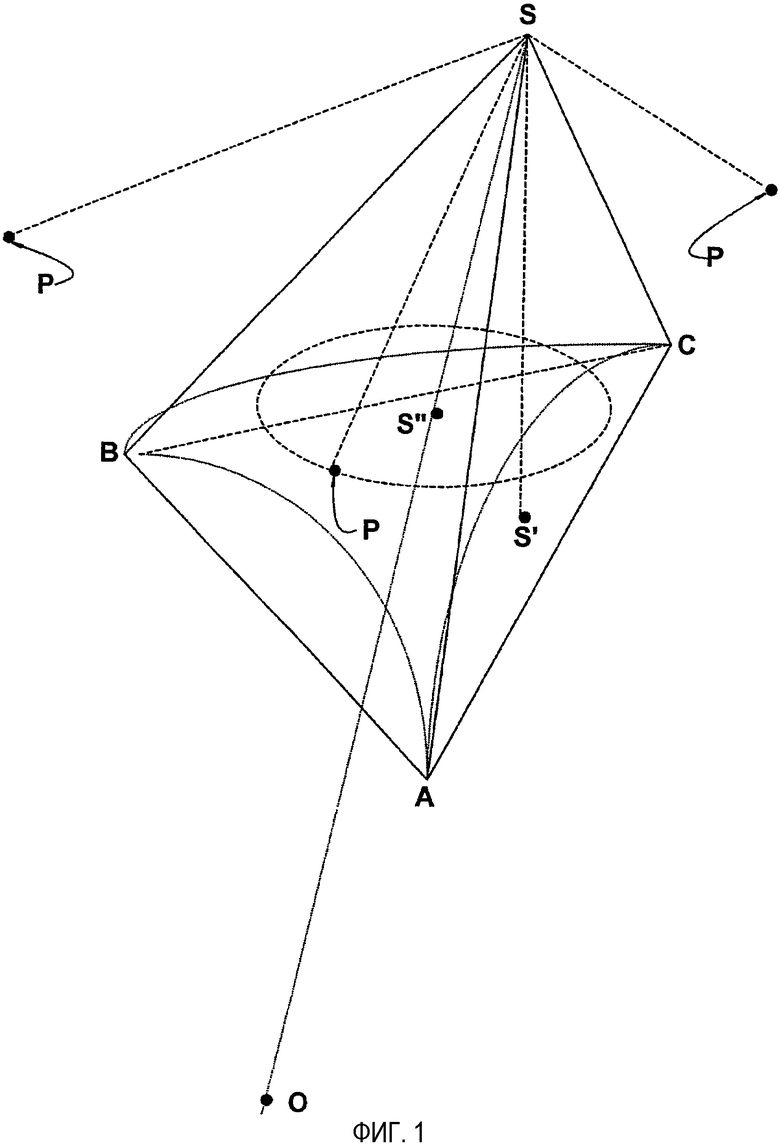
1. Система географического и пространственного позиционирования, отличающаяся тем, что содержит
первый, второй и третий опорные пункты, которые являются неподвижными относительно Земли, расположены на расстоянии относительно друг друга и не находятся на одной линии, и при этом каждый имеет заранее известное положение,
космическую платформу, одновременно видимую из неподвижных опорных пунктов, и которая перемещается в последовательные положения в зависимости от времени в соответствии с траекторией космической платформы, которая наклонена относительно оси вращения Земли,
передатчик, установленный на по меньшей мере одном из неподвижных опорных пунктов и предназначенный для излучения импульсов на определенной частоте, при этом каждый импульс излучается в заранее определенный момент времени,
приемник для каждого из неподвижных опорных пунктов, причем каждый приемник установлен на одном из неподвижных опорных пунктов для приема указанных импульсов в сигнальной траектории, охватывающей расстояние между космической платформой и неподвижным опорным пунктом, на котором установлен приемник,
точные часы в каждом неподвижном опорном пункте, причем все часы синхронизированы друг с другом,
управляющий блок, оперативно соединенный с передатчиком и с приемником и предназначенный для вычисления, для момента излучения каждого импульса боковых ребер четырехгранника, вершины которого определяются по трем неподвижным опорным пунктам и космической платформе, на основании определения времени прохождения каждого импульса по указанной сигнальной траектории между космической платформой и каждым неподвижным опорным пунктом, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы во время, когда космическая платформа является видимой для неподвижных опорных пунктов, при этом боковые ребра получены по разностям времен между моментом излучения каждого импульса и моментом прихода сигнала на каждый опорный пункт.
2. Система по п.1, отличающаяся тем, что передатчик установлен в первом неподвижном опорном пункте и предназначен для излучения импульсов на определенной частоте, причем каждый импульс излучается в заранее определенный момент времени, при этом каждый импульс содержит идентификационный признак первого неподвижного опорного пункта и момента излучения импульса, каждый импульс передается во все неподвижные опорные пункты с помощью устройства связи, размещенного на космической платформе.
3. Система по п.1, отличающаяся тем, что дополнительно содержит
дополнительный передатчик, установленный во втором неподвижном опорном пункте и предназначенный для излучения импульсов на определенной частоте, причем каждый импульс излучается в тот же самый заранее определенный момент времени излучения каждого импульса, излученного передатчиком, размещенным в первом неподвижном опорном пункте, при этом каждый импульс содержит идентификационный признак второго неподвижного опорного пункта и момента излучения указанного импульса,
дополнительный приемник, предусмотренный в третьем неподвижном опорном пункте и предназначенный для приема и идентификации импульсов, посланных вторым неподвижным опорным пунктом и переданных космической платформой, при этом управляющий блок предназначен для вычисления для каждого момента излучения импульсов первого и второго неподвижных опорных пунктов, боковых ребер четырехгранника с тремя вершинами, определяемыми тремя неподвижными опорными пунктами, и с четвертой вершиной, определяемой космической платформой, на основании разностей времен между моментом излучения импульса из первого неподвижного опорного пункта и его приемом в первом, во втором и в третьем неподвижном опорном пункте, соответственно, и на основании разности времен между излучением импульса из второго неподвижного пункта, чтобы обеспечивать возможность определения соответствующего продолжения траектории космической платформы во время, когда космическая платформа является видимой для неподвижных опорных пунктов.
4. Система по п.1, отличающаяся тем, что управляющий блок оперативно соединен со вторым и с третьим неподвижными опорными пунктами посредством дополнительного соответствующего средства связи, размещенного в каждом из неподвижных опорных пунктов.
5. Система по п.1, отличающаяся тем, что управляющий блок оперативно соединен с неподвижными опорными пунктами.
6. Система по п.5, отличающаяся тем, что каждый из первого, второго и третьего неподвижных опорных пунктов снабжен соответствующим управляющим блоком, при этом указанные управляющие блоки предназначены для определения других устройств связи и оперативно соединены с еще одним управляющим блоком, удаленным относительно управляющих блоков, размещенных в указанных неподвижных опорных пунктах.
7. Система по п.2, отличающаяся тем, что устройство связи представляет собой трансивер.
8. Система по п.1, отличающаяся тем, что содержит на объекте, географическое местоположение которого должно быть определено и относительно которого космическая платформа является видимой, приемник, предназначенный для приема импульсов, излученных передатчиком и ретранслированных через космическую платформу, и оперативно соединенный с управляющим блоком, предназначенным для вычисления прямолинейного сегмента, соединяющего с объектом четвертую вершину четырехгранника, для определения местоположения указанного объекта с помощью последовательных пересечений нескольких сферических геометрических мест точек, при этом каждое геометрическое место точек представляет собой сферу, причем, по меньшей мере, три из указанных сфер обозначают центр на космической платформе и радиус, соответствующий прямолинейному сегменту между космической платформой и объектом, при этом число пересечений сферических геометрических мест точек является достаточным для определения единственной точки, характеризующей местоположение объекта в заданный момент времени.
9. Система по п.8, отличающаяся тем, что сферические геометрические места точек являются достаточными для задания окружности при первом пересечении двух точек этой окружности при втором пересечении и только одной точкой в пространстве при третьем пересечении.
10. Система по п.9, отличающаяся тем, что, по меньшей мере, одно сферическое геометрическое место точек обозначает центр, совпадающий с центром Земли.
11. Система по п.10, отличающаяся тем, что управляющий блок для каждого последовательного импульса из первого неподвижного опорного пункта предназначен для вычисления соответствующего сферического геометрического места точек и его кругового пересечения на поверхности Земли, при этом указанный управляющий блок для каждых трех последовательных импульсов предназначен для вычисления соответствующего кругового пересечения на поверхности Земли, при этом указанные круговые пересечения взаимно пересекаются для обозначения единственного геометрического местоположения объекта на поверхности Земли.
12. Система по п.11, отличающаяся тем, что для каждого соответствующего сферического геометрического места точек и его кругового пересечения на поверхности Земли управляющий блок выполнен с возможностью использования для каждого последовательного импульса первого неподвижного опорного пункта соответствующего последовательного импульса второго неподвижного опорного пункта.
13. Система по п.1, отличающаяся тем, что неподвижные опорные пункты расположены на поверхности Земли.
14. Система по п.1, отличающаяся тем, что на основании разностей времен прохождения каждого импульса между космической платформой (S) и соответствующим неподвижным опорным пунктом управляющий блок выполнен с возможностью вычисления для последовательных импульсов уравнения движения космической платформы (S).
15. Система по п.1, отличающаяся тем, что для последовательных импульсов, переданных первым неподвижным опорным пунктом, управляющий блок предназначен для вычисления уравнения движения космической платформы.
16. Система по п.3, отличающаяся тем, что для последовательных импульсов, переданных вторым неподвижным опорным пунктом, управляющий блок выполнен с возможностью вычисления уравнения движения космической платформы.
17. Система по любому из п.16, отличающаяся тем, что управляющий блок выполнен с возможностью вычисления местоположения, по меньшей мере, одного объекта на основании уравнения движения космической платформы.
18. Система по п.17, отличающаяся тем, что объект дополнительно содержит управляющий блок, который выполнен с возможностью вычисления местоположения указанного объекта на основании уравнения движения космической платформы.
19. Система по п.18, отличающаяся тем, что объект дополнительно содержит точные часы на объекте.
20. Система по п.2, отличающаяся тем, что в устройстве связи используются радиоволны.
21. Способ географического и пространственного позиционирования, отличающийся тем, что содержит этапы, на которых
используют первый, второй и третий опорные пункты, которые являются неподвижными относительно Земли и которые расположены на расстоянии друг от друга и не находятся на одной линии, при этом каждый пункт имеет заданное местоположение,
используют космическую платформу, видимую для неподвижных опорных пунктов, которая перемещается в последовательные положения в зависимости от времени в соответствии с траекторией космической платформы, которая наклонена относительно оси вращения Земли,
используют передатчик для излучения импульсов на определенной частоте, причем каждый импульс излучается в заранее определенный момент времени,
используют приемник для приема указанных импульсов на сигнальной траектории, охватывающей расстояние между космической платформой и неподвижными опорными пунктами, связанными с приемником,
устанавливают точные часы в каждом опорном пункте, которые синхронизируют друг с другом,
используют управляющий блок, оперативно соединенный с передатчиком и с приемником, посредством которого вычисляют для момента излучения каждого импульса каждое боковое ребро четырехгранника, три вершины которого определены тремя неподвижными опорными пунктами, и четвертая вершина определена космической платформой, на основании разностей времен прохождения каждого импульса между космической платформой и соответствующим неподвижным опорным пунктом, для определения соответствующего продолжения траектории космической платформы, когда последняя является видимой для неподвижных опорных пунктов.
22. Способ по п.21, отличающийся тем, что передатчик, установленный в первом неподвижном опорном пункте, обеспечивает излучение импульсов на определенной частоте, причем каждый импульс излучается в заранее определенный момент времени и содержит идентификационный признак неподвижного опорного пункта в момент излучения импульса, каждый импульс передают во все неподвижные опорные пункты через устройство связи, установленное на космической платформе,
при этом в способе дополнительно
передают с помощью первого неподвижного опорного пункта импульсы, каждый из которых содержит кодированную информацию о моменте излучения каждого импульса и идентификационный признак первого неподвижного опорного пункта,
принимают и передают с помощью устройства связи, установленного на космической платформе, указанные импульсы, переданные первым неподвижным опорным пунктом,
принимают в первом, во втором и в третьем неподвижных опорных пунктах импульсы, излученные первым неподвижным опорным пунктом и переданные устройством связи,
вычисляют разности времен каждого импульса, принятого в первом, во втором и в третьем неподвижных опорных пунктах, относительно времени излучения каждого импульса, излученного первым неподвижным опорным пунктом,
сравнивают указанные разности времен и передают данные о них в управляющий блок с помощью второго устройства связи для данных,
определяют в управляющем блоке для момента излучения каждого импульса первого неподвижного опорного пункта боковые ребра четырехгранника, три вершины которого заданы тремя неподвижными опорными пунктами, и четвертая вершина задана космической платформой на основании разностей времен между моментом излучения импульса первого неподвижного опорного пункта и его приемом в первом, во втором и в третьем неподвижных опорных пунктах, соответственно.
23. Способ по п.22, отличающийся тем, что
используют дополнительный передатчик, устанавливаемый во втором неподвижном опорном пункте для излучения импульсов на определенной частоте, при этом каждый импульс излучают в один и тот же заранее определенный момент времени импульса, излученного передатчиком и содержащего идентификационный признак второго неподвижного опорного пункта и момента излучения указанного импульса,
синхронизируют время точных часов в трех неподвижных опорных пунктах с общим опорным временем,
передают импульсы с помощью первого неподвижного опорного пункта, при этом каждый импульс содержит кодированную информацию о моменте излучения каждого указанного импульса и о идентификационном признаке первого неподвижного опорного пункта,
передают импульсы с помощью второго неподвижного опорного пункта, при этом каждый импульс содержит кодированную информацию о моменте излучения каждого импульса в момент излучения каждого импульса из первого неподвижного опорного пункта и об идентификационном признаке второго неподвижного опорного пункта,
принимают и передают с помощью устройства связи, установленного на космической платформе, указанные импульсы, переданные первым и вторым неподвижными опорными пунктами,
принимают во втором и в третьем неподвижных опорных пунктах импульс, излученный первым неподвижным опорным пунктом и переданный устройством связи,
принимают в третьем неподвижном опорном пункте импульс, излученный вторым неподвижным пунктом и переданный устройством связи,
вычисляют разности времен каждого импульса, принятого в третьем неподвижном опорном пункте относительно времени излучения каждого указанного импульса, излученного вторым неподвижным пунктом,
сравнивают указанные разности времен и передают данные о них в управляющий блок с помощью второго устройства связи для передачи данных,
определяют в управляющем блоке для момента излучения каждого импульса первого и второго неподвижных опорных пунктов боковые ребра четырехгранника, три вершины которого заданы тремя неподвижными опорными пунктами, и четвертая вершина задана космической платформой на основании разностей времен между моментом излучения импульса из первого неподвижного опорного пункта и его приемом во втором и в третьем неподвижных опорных пунктах, соответственно, и разности времен между излучением импульса второго неподвижного опорного пункта и его приемом в третьем неподвижном опорном пункте, чтобы обеспечить возможность определения соответствующего продолжения траектории космической платформы во время, когда последняя является видимой для неподвижных опорных пунктов.
24. Способ по п.22, отличающийся тем, что дополнительно устанавливают на объекте приемник, оперативно связанный с передатчиком, для приема указанных импульсов на сигнальной траектории, охватывающей расстояние между космической платформой и объектом, а также с управляющим блоком, посредством которого вычисляет прямолинейный сегмент, который соединяет объект с космической платформой, для определения местоположения объекта с помощью последовательных пересечений нескольких сферических геометрических мест точек, при этом каждое геометрическое место точек представляют сферой, по меньшей мере, три из указанных сфер в определенный момент времени обозначают центр на космической платформе и радиус, соответствующий прямолинейному сегменту, задаваемому между космической платформой и объектом в заданный момент времени, а некоторое количество пересечений сферических геометрических мест точек является достаточным для определения единственной точки, характеризующей местоположение объекта.
25. Способ по п.24, отличающийся тем, что дополнительно с помощью управляющего блока вычисляют,
пересечение каждых двух последовательных сферических геометрических мест точек, чтобы определить первое круговое пересечение этого пересечения,
пересечение третьего сферического геометрического места точек с первым круговым пересечением, чтобы определить второе круговое пересечение,
пересечение второго кругового пересечения с первым круговым пересечением, чтобы обозначить две точки локализации,
пересечение четвертого геометрического места точек со вторым круговым пересечением, чтобы обозначить третье круговое пересечение, пересекающее одну из двух точек локализации.
26. Способ по п.25, отличающийся тем, что одно из сферических геометрических мест точек имеет центр, совпадающий с центром Земли, а другие сферические геометрические места точек имеют центр на космической платформе.
27. Способ по п.22, отличающийся тем, что дополнительно вычисляют в управляющем блоке для последовательных импульсов, переданных первым неподвижным опорным пунктом, уравнение движения космической платформы.
28. Способ по п.23, отличающийся тем, что дополнительно вычисляют в управляющем блоке для последовательных импульсов, переданных первым неподвижным опорным пунктом и вторым неподвижным опорным пунктом, уравнение движения космической платформы.
29. Способ по п.27, отличающийся тем, что дополнительно вычисляют в управляющем блоке местоположение каждого объекта на основании уравнения движения космической платформы.
30. Способ по п.29, отличающийся тем, что дополнительно на каждом объекте размещают управляющий блок для вычисления местоположения объекта на основании уравнения движения космической платформы.
31. Способ по п.24, отличающийся тем, что дополнительно на каждом объекте размещают точные часы.
32. Способ по п.21, отличающийся тем, что дополнительно осуществляют коррекцию временных задержек при передаче импульсов с помощью устройства связи.
| US 6313790 B2, 06.11.2001 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| EP 1026519 A1, 09.08.2000 | |||
| US 6166687 A, 26.12.2000 | |||
| US 3643259 A, 15.02.1972. | |||

