Изобретение относится к устройству исполнительного элемента для формирования линейного перемещения согласно родовому понятию п. 1 формулы изобретения, а также к способу установки положения линейно подвижного элемента.
Для определенных задач юстировки применяются исполнительные элементы, с помощью которых можно выполнять по возможности высокоточные линейные регулировки. В идеальном случае такие исполнительные элементы являются по возможности малыми, выполненными с электрическим приводом, устойчивыми по отношению к условиям окружающей среды, в частности загрязнениям, и по возможности износостойкими.
Известно, что подобные задачи юстировки решаются вручную с соответствующими высокими затратами, или предусматриваются электромагнитные линейные исполнительные элементы, шпиндельные приводы или пневмогидравлические исполнительные элементы. Также известно применение пьезоэлектрических или магниторезистивных исполнительных элементов. Для больших отклонений также известны пьезоэлектрические исполнительные элементы, которые работают по принципу гусеничных лент или лентоводителя. Для этого, как правило, требуется три исполнительных элемента, а именно по одному зажимному исполнительному элементу впереди и позади и один исполнительный элемент для движения вперед.
Известные исполнительные элементы, как правило, являются затратными и нестойкими к загрязнению и износу.
Наряду с вышеописанными типами исполнительных элементов также известен линейный привод, который обходится только массой, зажимным устройством и только одним исполнительным элементом. Между массой и зажимным устройством размещается пьезоэлектрический исполнительный элемент, который управляется возрастающим напряжением таким образом, что масса посредством получаемой при этом отклоняющей силы ускоряется, но сила остается ниже силы трения сцепления зажимного устройства, на которое опирается исполнительный элемент. При достижении максимального отклонения пьезоэлемента управляющее напряжение снижается так быстро, что получаемое отсюда сжатие пьезоэлемента ведет к отрицательной ускоряющей силе, которая хотя и уменьшает перемещение массы, но настолько велика, что трение сцепления зажимного устройства превышается, зажимное устройство, таким образом, подтягивается в направлении перемещения, и на следующей фазе отклонения образует новую, теперь сдвинутую в направлении движения, опорную точку. Если вместо профиля управления «медленное отклонение, быстрое сжатие» изменить последовательность на обратную, то также направление движения этого линейного двигателя реверсируется.
Недостатком этого способа является зависимость отклонения от величины текущего трения сцепления зажимного элемента. Особенно, если трение сцепления изменяется из-за нанесения масла или смазки, то желательная точность или даже работоспособность в целом устройства регулирования теряется. Кроме того, система, как и в случае всех механических систем, у которых две плоскости испытывают трение друг о друга, в долгосрочной перспективе склонна к износу и, тем самым, к изменениям свойств системы.
В JP 2000 314402 А раскрыто устройство исполнительного элемента для формирования линейного перемещения, содержащее гидравлический исполнительный элемент, который содержит первый поршневой элемент для приведения в действие исполнительного элемента и второй поршневой элемент для создания линейного перемещения, с которыми соотнесены соответствующие гидравлически связанные рабочие камеры, объемы которых могут изменяться из-за перемещения соответствующего поршневого элемента. При этом предусмотрен пьезоэлектрический исполнительный элемент для приложения силы к первому поршневому элементу. Кроме того, соответствующие рабочие камеры соединены через два противоходно ориентированных обратных клапана.
В JP 2001 012402 А раскрыто устройство исполнительного элемента с двумя поршневыми элементами, с которыми соотнесены соответствующие гидравлически связанные рабочие камеры. За счет перемещения соответствующего поршневого элемента соответствующий объем рабочих камер может изменяться. Кроме того, предусмотрен магнитный элемент для приложения силы к одному из поршневых элементов.
В DE 10 2008 046 562 А1 раскрыт гидравлический линейный привод с поршнем, который установлен с возможностью перемещения в цилиндре, причем цилиндр имеет впускное отверстие, через которое посредством насосного устройства в цилиндр может вводиться флюид. Цилиндр имеет, кроме того, выпускное отверстие, через которое флюид может отводиться. При этом предусмотрено, что для приведения в действие насосного устройства предусмотрен пьезоэлектрический или магнитострикционный исполнительный элемент.
Из JP S62 28507 А известен исполнительный элемент с электрострикционным телом. Посредством электрострикционного тела приводится в движение шток.
Наконец, в ЕР 1 190 829 А2 раскрыто устройство исполнительного элемента для формирования линейного перемещения, содержащее поршень, который размещен в цилиндре. Поршень имеет возможность перемещения за счет того, что поршень через рабочий флюид нагружается давлением. При этом к рабочему флюиду прикладывается давление посредством приводной силы пьезоэлектрического элемента.
Таким образом, в основе изобретения лежит задача предоставить устройство исполнительного элемента, а также способ вышеуказанного типа, которые особенно простым, экономичным, точным и износостойким образом обеспечивают возможность формирования хорошо определенных линейных перемещений.
Эта задача решается устройством исполнительного элемента с признаками п. 1 формулы изобретения, а также способом с признаками п. 5 формулы изобретения.
Такое устройство исполнительного элемента для формирования линейного перемещения содержит гидравлический исполнительный элемент с первым поршневым элементом для приведения в действие исполнительного элемента и вторым поршневым элементом для создания линейного перемещения, с которыми соотнесены соответствующие связанные текучей средой (флюидом) рабочие камеры, объемы которых могут изменяться из-за перемещения соответствующего поршневого элемента. Кроме того, предусмотрен пьезоэлектрический исполнительный элемент (пьезоэлемент) для приложения силы к первому поршневому элементу. За счет связи пьезоэлектрического управления и гидравлической передачи возможно особенно точное формирование линейных перемещений. В частности, оба поршневых элемента могут быть выполнены таким образом, что сила, которую прикладывает пьезоэлемент, передается с заданным передаточным отношением. Также подача второго поршневого элемента в качестве реакции на пезоэлектрическое воздействие испытывает тогда такое передаточное отношение, так что, например, относительно большие перемещения подачи пьезоэлемента могут преобразовываться в относительно малые перемещения поршня, что приводит к особенно точному позиционированию второго поршневого элемента и связанных с ним элементов. Поэтому описанное устройство исполнительного элемента особенно пригодно для высокоточных процессов юстировки и тому подобного.
Соответствующие рабочие камеры соединены между собой через два противоходных обратных клапана, чтобы обеспечивать возможность управляемого перехода рабочего флюида между рабочими камерами. В соответствии с изобретением оба обратных клапана имеют различные усилия отпирания.
Кроме того, является рациональным, если рабочая камера первого поршневого элемента через дроссельный элемент связана с резервуаром для рабочего флюида гидравлического исполнительного элемента.
С помощью описанного устройства обеспечивается следующая возможность для формирования линейных перемещений, которые также выходят из диапазона перемещений самого пьезоэлемента. На первой фазе перемещения пьезоэлемент управляется таким образом, что он формирует быстрое перемещение. Быстрое перемещение переносится на первый поршень и создает давление в рабочем флюиде, которое достаточно, чтобы открыть клапан между рабочими камерами в направлении второй рабочей камеры. Жидкость перетекает теперь во вторую рабочую камеру и перемещает там второй поршневой элемент, что формирует желательное перемещение вперед.
На второй фазе перемещения пьезоэлемент медленно перемещается против направления, в котором он перемещался на первой фазе перемещения. Тем самым, хотя первый поршневой элемент также отводится в противоположном направлении, однако, за счет медленного перемещения не открывается обратный клапан, направленный из второй к первой рабочей камере. Возникающее изменение объема в первой рабочей камере выравнивается с помощью резервуара через дроссельный элемент. Пьезоэлемент и первый поршневой элемент, таким образом, снова устанавливаются в их исходное положение, в то время как второй поршневой элемент остается в своем положении.
За счет повторения обеих фаз чередующимся образом может быть реализована любая дальнейшая подача второго поршневого элемента, которая превышает собственно диапазон перемещения пьезоэлектрического исполнительного элемента. Это обеспечивает особенно точное позиционирование второго поршневого элемента по расширенной линейной траектории перемещения и одновременно обеспечивает преимущество, заключающееся в том, что для удержания заданного положения второго поршневого элемента не нужно затрачивать никакой энергии. Кроме того, процесс перемещения, в отличие от вышеописанных исполнительных элементов по принципу гусеничной ленты, не зависит от трения сцепления участвующих компонентов и поэтому не испытывает негативного влияния из-за загрязнения, нанесения масла или тому подобного.
Рабочие камеры могут при этом рациональным образом образовываться соответствующими цилиндрами, в которых установлены поршни с возможностью перемещения. Альтернативой этому является выполнение рабочих камер посредством соответствующих сильфонов, которые связаны с поршневыми элементами. В этой форме выполнения все существенно подвижные части устройства исполнительного элемента герметизированы и, тем самым, защищены от загрязнения, так что обеспечивается долговременно надежное и износостойкое функционирование устройства.
Изобретение, кроме того, относится к способу установки положения линейно перемещаемого элемента, при котором посредством пьезоэлектрического исполнительного элемента к первому поршневому элементу прикладывается сила, причем за счет приложения силы рабочая камера, ассоциированная с первым поршневым элементом, изменяется по своему объему, и приложенная сила передается на второй поршневой элемент, ассоциированная с которым рабочая камера гидравлически связана с первой рабочей камерой.
Как уже описано для соответствующего изобретению устройства, таким образом обеспечивается возможность перемещения линейно перемещающегося элемента, связанного с вторым поршневым элементом, которое выходит за пределы диапазона перемещения самого пьезоэлектрического исполнительного элемента. При этом, как уже описано выше, для выполнения перемещения в заданном направлении, пьезоэлектрический исполнительный элемент на первой фазе перемещения так быстро перемещается в заданном направлении, что созданное посредством перемещения давление в первой рабочей камере преодолевает силу запирания обратного клапана, гидравлически соединяющего рабочие камеры в направлении перемещения. Таким образом, перемещение пьезоэлектрического исполнительного элемента на первой фазе перемещения переносится на второй поршневой элемент.
На второй фазе перемещения пьезоэлектрический исполнительный элемент так медленно перемещается против заданного направления, что созданное посредством перемещения давление в первой рабочей камере не преодолевает силу запирания обратного клапана, гидравлически соединяющего рабочие камеры противоположно направлению перемещения. В противоположность первой фазе перемещения, здесь обе рабочие камеры не соединены гидравлически, тем самым перемещение пьезоэлектрического исполнительного элемента не передается на второй поршневой элемент. Как уже пояснено, таким образом может создаваться перемещение, которое выходит за пределы собственно диапазона перемещения пьезоэлектрического исполнительного элемента, что за счет передаточного отношения между обоими поршневыми элементами может дополнительно увеличиваться или уменьшаться.
Чтобы в течение второй фазы перемещения компенсировать изменение объема в первой рабочей камере, в течение второй фазы перемещения в первую рабочую камеру из резервуара через дроссельный элемент подводится рабочий флюид или отводится из нее в резервуар.
Первая и вторая фазы перемещения предпочтительно повторяются чередующимся образом, пока второй поршневой элемент не окажется в заданном номинальном положении. Описанным образом можно реализовать любые расширенные линейные перемещения, которые ограничены только диапазоном перемещения второго поршневого элемента, но не максимальным отклонением пьезоэлектрического исполнительного элемента. В целом способ обеспечивает особенно точное формирование линейных перемещений при возможно малом износе и особенно компактной механической конструкции реализующего его устройства.
Изобретение и его формы выполнения поясняются далее более подробно со ссылками на чертежи, на которых показано следующее:
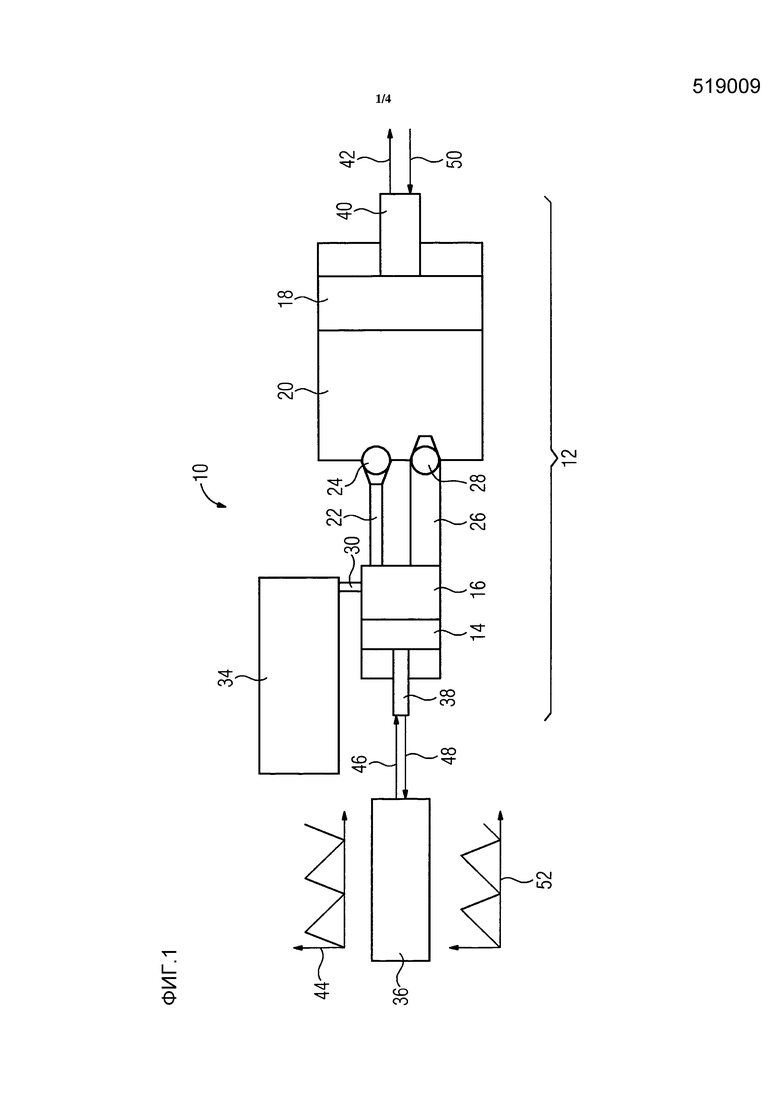
Фиг. 1 - схематичное представление примера выполнения соответствующего изобретению устройства с гидравлическими цилиндрами в качестве гидравлических исполнительных элементов;
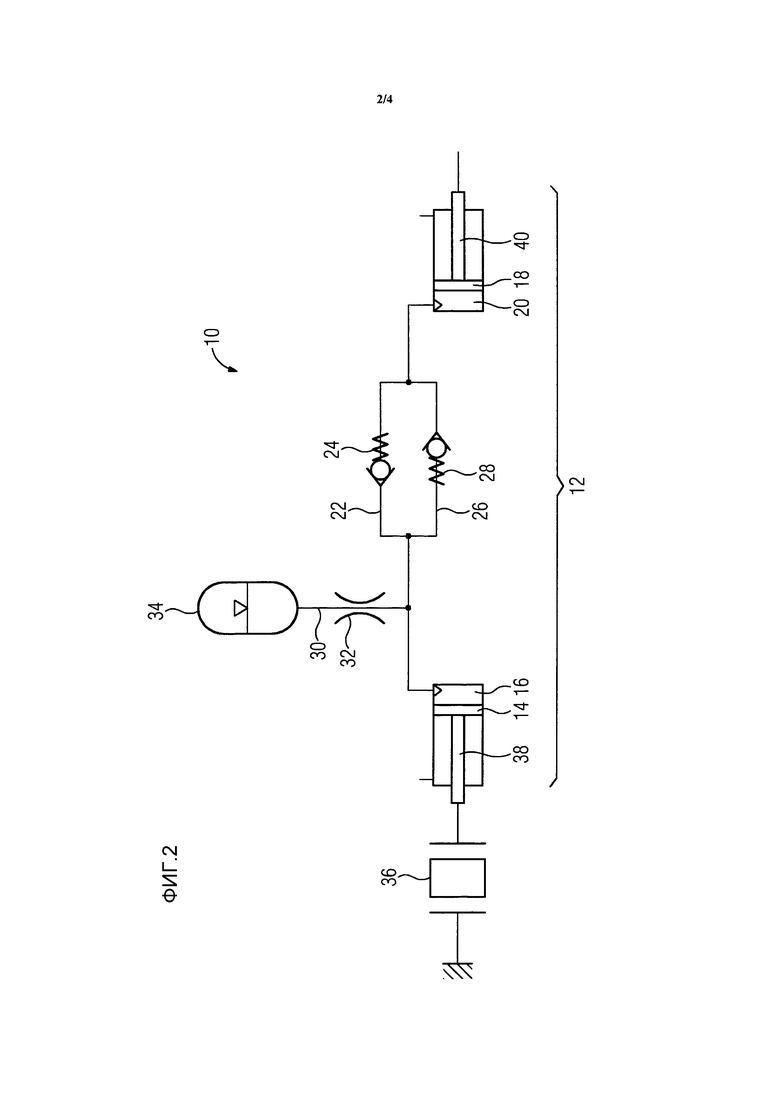
Фиг. 2 - гидравлическая эквивалентная схема устройства согласно фиг. 1;
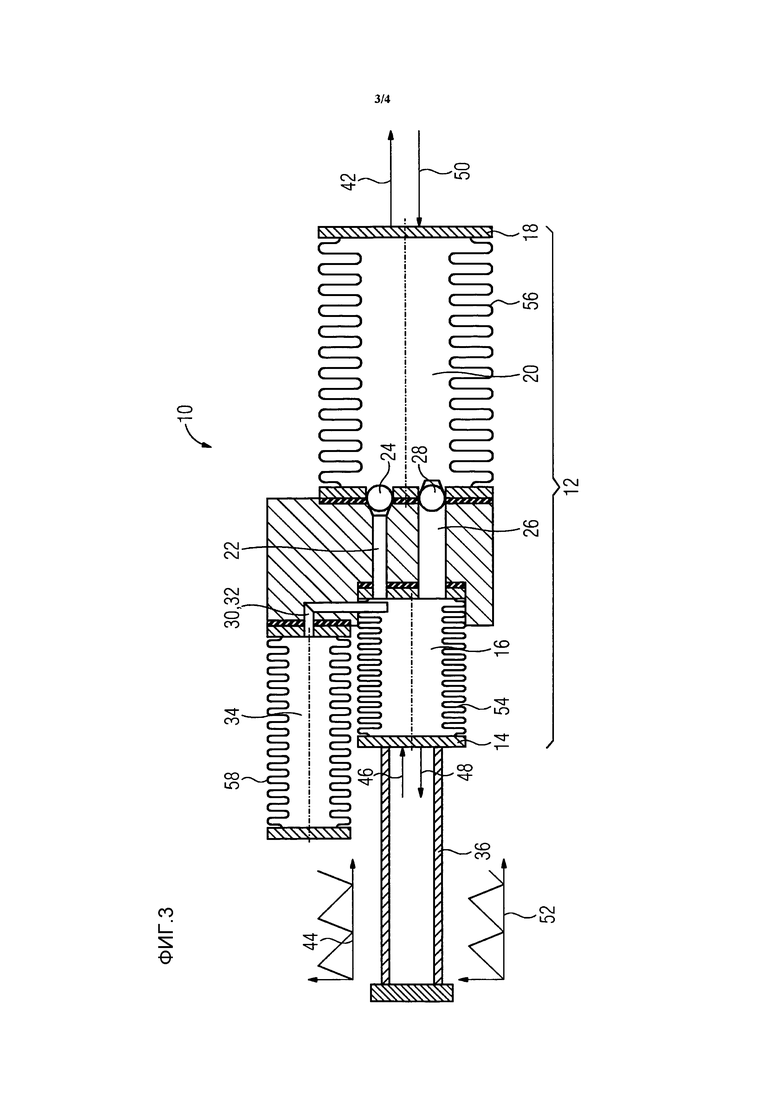
Фиг. 3 - схематичное представление альтернативного примера выполнения соответствующего изобретению устройства с сильфонами в качестве гидравлических исполнительных элементов;
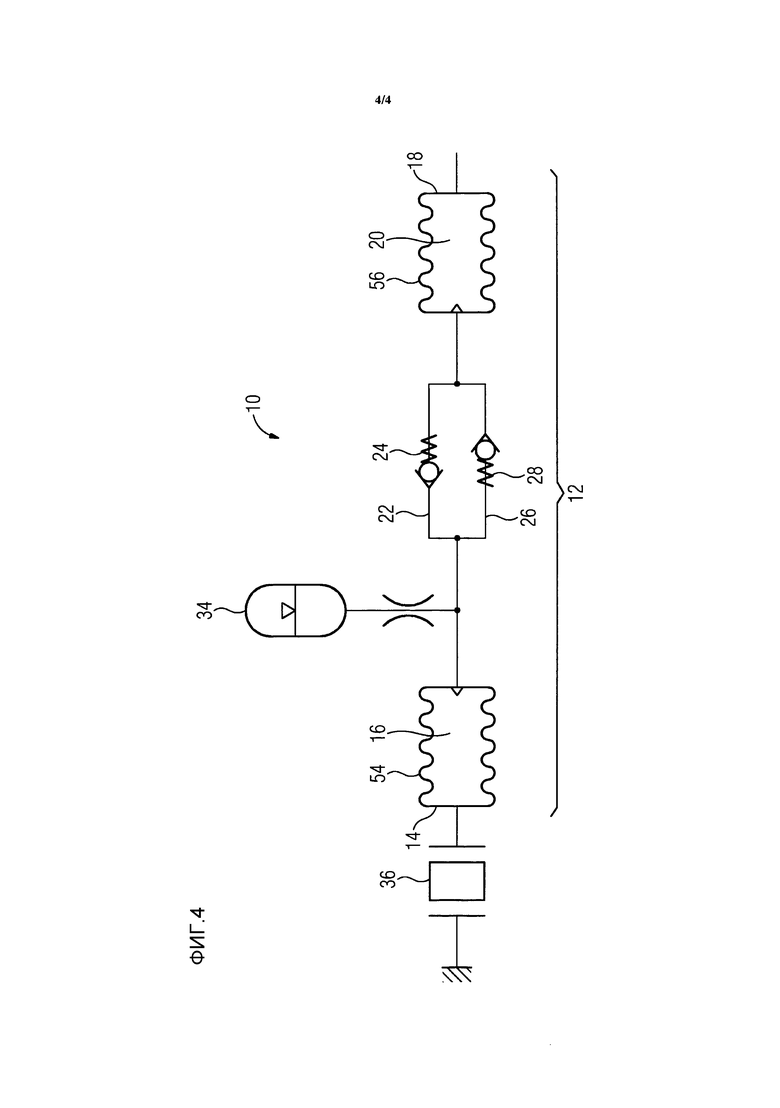
Фиг. 4 - гидравлическая эквивалентная схема устройства согласно фиг. 3.
Устройство, в целом обозначенное ссылочной позицией 10, для формирования линейного перемещения, например, для задач юстировки содержит гидравлический исполнительный элемент 12, который позиционирован с возможностью перемещения в соответствующей приемной (рабочей) камере 16, и второй поршень 18, который установлен с возможностью перемещения во второй приемной (рабочей) камере 20. Приемная камера 16 через первую линию 22, соединенную с одноходовым клапаном 24, который открывается в направлении второй приемной камеры 20, соединена с второй приемной камерой 20. Вторая линия 26 с вторым одноходовым клапаном 28, который открывается в направлении первой приемной камеры 16, соединяет вторую приемную камеру 20 с первой приемной камерой 16. Первая приемная камера 16, кроме того, через линию 30, которая содержит дроссельный элемент 32, соединена с резервуаром 34 для рабочего флюида.
Для приведения в действие первого поршня 14 предусмотрен пьезоэлектрический исполнительный элемент. Сила, прикладываемая к поршневому штоку 38 первого поршня 14 от пьезоэлектрического исполнительного элемента 36, гидравлически передается на второй поршень 18, поршневой шток 40 которого связан с перемещаемым элементом.
Для того чтобы осуществлять перемещение в направлении стрелки 42, пьезоэлектрический исполнительный элемент 36 управляется в соответствии с диаграммой 44 «сила-время». На первой фазе перемещения пьезоэлектрический исполнительный элемент 36 быстро перемещается в направлении стрелки 46. Это перемещение переносится на первый поршень 14, причем вызванное тем самым давление в первой приемной камере 16 превышает силу запирания клапана 24, так что рабочий флюид переходит из первой приемной камеры 16 во вторую приемную камеру 20 и там создает силу, действующую на второй поршень 18, так что он перемещается направлении стрелки 42. На второй фазе перемещения пьезоэлемент 36 отводится в направлении стрелки 48, что, однако осуществляется заметно медленнее, чем первая фаза перемещения. Тем самым поршень 14 также перемещается в направлении стрелки 48, но из-за медленного перемещения сила запирания клапана 28 не превышается. Таким образом, рабочий флюид не переходит из второй приемной камеры 20 в первую приемную камеру 16, второй поршень 18 сохраняет свое положение. Изменение объема первой приемной камеры 16 из-за перемещения первого поршня 14 компенсируется рабочим флюидом, который течет из резервуара 34, по линии 30 и дроссель 32 в первую приемную камеру 16.
За счет чередующегося повторения обеих фаз перемещения поршень 18, таким образом, может перемещаться дальше, чем задается посредством диапазона перемещения пьезоэлектрического исполнительного элемента 36. Передаточное отношение между поршнями 14 и 18 обеспечивает при этом позиционирование второго поршня 18 с особенно высокой точностью, причем предпочтительным образом для удержания поршня 18 в положении не нужно затрачивать никакой силы.
Если поршень 18 должен отводиться в противоположном направлении, то есть в направлении стрелки 15, то обе фазы перемещения реверсируются, как наглядно иллюстрирует диаграмма 52 «сила-время». Сначала, таким образом, пьезоэлектрический исполнительный элемент 36 быстро перемещается в направлении стрелки 48, так что результирующее изменение давления в первой приемной камере 16 превышает силу запирания одноходового клапана 28, и жидкость из второй приемной камеры 20 может перетекать в первую приемную камеру 16, за счет чего поршень 18 перемещается в направлении стрелки 50. На второй фазе перемещения пьезоэлектрический исполнительный элемент 36 медленно перемещается в направлении стрелки 46, за счет чего, в свою очередь, сила запирания одноходового клапана 24 не превышается, так что второй поршень 18 удерживает свое положение, и гидравлический флюид из первой приемной камеры 16 через дроссель 32 и линию 30 перетекает назад в резервуар 34. И здесь за счет чередующегося повторения обеих фаз перемещения может осуществляться дальнейшее перемещение поршня 18.
Фиг. 3 и 4 показывают альтернативное выполнение устройства 10, при котором вместо гидравлических цилиндров применяются сильфоны 54, 56, которые соединены с поршневыми элементами 14, 18 и, таким образом, образуют приемные камеры 16, 20. Также резервуар 34 образован сильфоном 58. В остальном устройство 10 согласно фиг. 3 и 4 функционально подобно устройству 10 согласно фиг. 1 и 2. Применение сильфонов 54, 56, 58 обеспечивает возможность выполнения устройства 10 по существу герметичным, так что оно в минимальной степени подвержено загрязнению и износу. Поэтому подобное устройство 10 может эксплуатироваться особенно продолжительно с сохраняющейся высокой точностью.
Изобретение относится к устройству (10) исполнительного элемента для формирования линейного перемещения, содержащему гидравлический исполнительный элемент (12), который содержит первый поршневой элемент (14) для приведения в действие исполнительного элемента и второй поршневой элемент (18) для создания линейного перемещения, с которыми соотнесены соответствующие гидравлически связанные рабочие камеры (16, 20), объемы которых могут изменяться из-за перемещения соответствующего поршневого элемента (14, 18), причем предусмотрен пьезоэлектрический исполнительный элемент (36) для приложения силы к первому поршневому элементу (14). Причем соответствующие рабочие камеры (16, 20) соединены через два противоходно ориентированных обратных клапана (24, 28), имеющих различные усилия отпирания. Технический результат - повышение точности линейных перемещений. 2 н. и 5 з.п. ф-лы, 4 ил.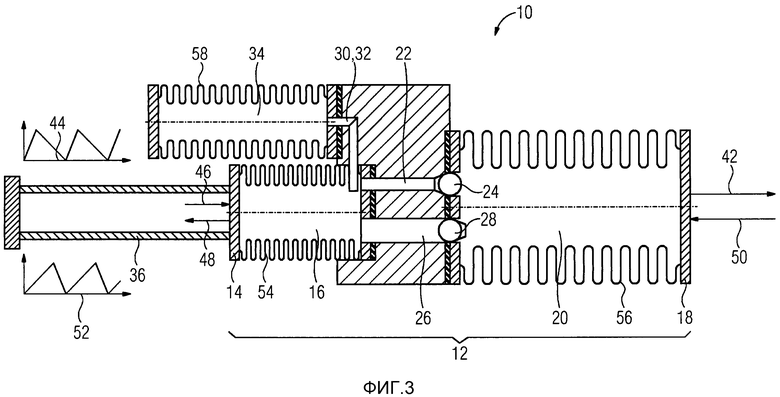
1. Устройство (10) исполнительного элемента для формирования линейного перемещения, содержащее гидравлический исполнительный элемент (12), который содержит первый поршневой элемент (14) для приведения в действие исполнительного элемента и второй поршневой элемент (18) для создания линейного перемещения, с которыми соотнесены соответствующие гидравлически связанные рабочие камеры (16, 20), объемы которых могут изменяться из-за перемещения соответствующего поршневого элемента (14, 18),
причем предусмотрен пьезоэлектрический исполнительный элемент (36) для приложения силы к первому поршневому элементу (14),
и причем соответствующие рабочие камеры (16, 20) соединены через два противоходно ориентированных обратных клапана (24, 28),
отличающееся тем, что
оба обратных клапана (24, 28) имеют различные усилия отпирания.
2. Устройство (10) исполнительного элемента по п. 1, отличающееся тем, что
рабочая камера (16) первого поршневого элемента (14) через дроссельный элемент (32) связана с резервуаром (34) для рабочего флюида гидравлического исполнительного элемента (12).
3. Устройство (10) исполнительного элемента по п. 1 или 2, отличающееся тем, что
рабочие камеры (16, 20) образованы соответствующими цилиндрами, в которых установлены поршни (14, 18) с возможностью перемещения.
4. Устройство (10) исполнительного элемента по п. 1 или 2, отличающееся тем, что
рабочие камеры (16, 20) образованы соответствующими сильфонами (54, 56).
5. Способ установки положения линейно перемещаемого элемента, при котором посредством пьезоэлектрического исполнительного элемента (36) к первому поршневому элементу (14) прикладывают силу, причем за счет приложения силы изменяют объем рабочей камеры (16), ассоциированной с первым поршневым элементом (14), и передают приложенную силу на второй поршневой элемент (18), рабочая камера (20) которого гидравлически связана с первой рабочей камерой (16),
отличающийся тем, что
для выполнения перемещения в заданном направлении, пьезоэлектрический исполнительный элемент (36) на первой фазе перемещения так быстро перемещается в заданном направлении, что созданное посредством перемещения давление в первой рабочей камере (16) преодолевает силу запирания обратного клапана (24, 28), гидравлически соединяющего рабочие камеры (16, 20) в направлении перемещения,
причем на второй фазе перемещения пьезоэлектрический исполнительный элемент (36) так медленно перемещается против заданного направления, что созданное посредством перемещения давление в первой рабочей камере (16) не преодолевает силу запирания обратного клапана (24, 28), гидравлически соединяющего рабочие камеры (16, 20) противоположно направлению перемещения.
6. Способ по п. 5, отличающийся тем, что
в течение второй фазы перемещения, для компенсации изменения объема в первой рабочей камере (16), рабочий флюид перетекает между первой рабочей камерой (16) и резервуаром (34) через дроссельный элемент (32).
7. Способ по п. 5 или 6, отличающийся тем, что
первую и вторую фазы перемещения повторяют чередующимся образом, пока второй поршневой элемент (18) не окажется в заданном номинальном положении.
| JP 2000314402 A, 14.11.2000 | |||
| JP 2001012402 A, 16.01.2001 | |||
| DE 102008046562 A1, 11.03.2010 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2184282C2 |
| Пьезогидравлический шаговый привод | 1986 |
|
SU1383013A1 |

