Настоящее изобретение относится к способу управления по меньшей мере двумя роботами, имеющими соответствующие рабочие пространства, включающие в себя по меньшей мере одну общую область, в котором заранее подготовлен центральный электронный блок для управления роботами, предусмотренный для взаимодействия с различными роботами и для управления движениями роботов, предотвращая контакт между роботами в их общей рабочей области.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В стандартном программировании промышленной ячейки с несколькими роботами, которые должны работать в общем пространстве, необходимо определить команды внутри программы каждого робота, чтобы робот выполнял последовательно следующие операции.
1. Запрос заказа для входа в общую область (выходной сигнал блоку управления).
2. Ожидание разрешения от блока управления для входа в общую область (входной сигнал роботу от блока управления).
3. Присутствие внутри общей области (выходной сигнал).
4. Выход из общей области.
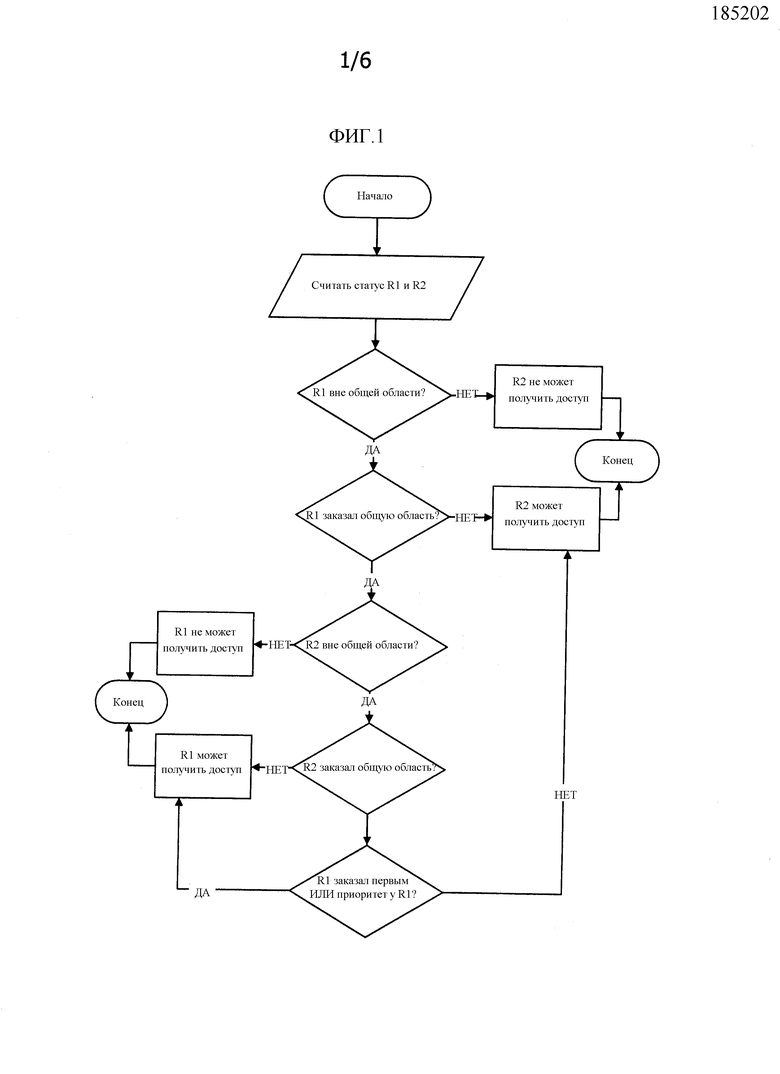
Последовательность этих команд должна повторяться на каждой отдельной части программы, в которой предусмотрена «блокировка» программирования (соответствующая рабочему этапу в общей области). Управление политикой, которая регулирует доступы к одной или более общим областям, возложено на блок управления (контроллер с программируемой логикой (PLC)), что предполагает задачу управления приоритетом роботов, которые могут получать доступ к упомянутым областям. В простом примере программы, в которой только два робота разделяют общую рабочую область, PLC, при условии запроса доступа от робота R1, проверяет, нет ли других ожидающих запросов от робота R2, и что робот R2 не работает в общей области. Если это именно такой случай, доступ роботу R1 предоставляется. Подобным образом возможно переформулировать политику доступа робота R2. Вышеупомянутая система доступов PLC может быть схематически представлена, как показано на прилагаемой фиг. 1.
Программы роботов должны, в свою очередь, быть способными управлять входными сигналами (для доступа) и выходными сигналами (для передачи PLC сигнала заказа, или присутствия, или иного, внутри общей области) таким образом, чтобы быть способными надлежащим образом управлять политикой доступа к и выходом из общих областей. Пример программы робота следующий:
send(req_I2, ON)
wait(cons_I2, ON)
send(interf_I2, OFF)
send(req_I2, OFF)
MOVEFLY JOINT TO pnt0650x ADVANCE
MOVEFLY JOINT TO pnt0150x ADVANCE
MOVEFLY JOINT TO pnt0653x ADVANCE
MOVE JOINT TO wp4661,
WITH CONDITION[spot(1, 4661, 1, FALSE)],
ENDMOVE
MOVEFLY JOINT TO pnt0444x ADVANCE
MOVEFLY JOINT TO pnt0443x ADVANCE
MOVEFLY JOINT TO pnt0442x ADVANCE
MOVE JOINT TO xtn0008X
Send (interf_I2, ON)
Как можно видеть, предусмотрена отправка сигнала req_I2, который представляет запрос доступа в область I2 блокировки. Следуя за этим сигналом, система находится в ожидании сигнала cons_I2, который должен быть отправлен PLC, чтобы разрешить доступ в область блокировки. Как только сигнал начинания получен от PLC, робот отправляет сигнал interf_I2 заполнения области контакта и отправляет сигнал req_I2 заказа на ноль. Наконец, после выполнения движений робот отправляет сигнал interf_I2 заполнения области блокировки на ноль.
При условии архитектуры вышеупомянутого типа, главными ограничениями являются следующие:
- если поток программ робота изменяется, имеется высокая вероятность попадания системы в ситуации несоответствия, например, если робот перемещается вручную (в PROG) в общую область, PLC не «предупреждается» о его присутствии, и это может вызвать общее нарушение работоспособности системы блокировки с последующим возможным столкновением между роботами;
- сложность программ роботов особенно высокая в той степени, в которой для каждой отдельной блокировки необходимо вводить команды для заказа, ожидания, присутствия и отмены общей области;
- нет управления в реальном времени местоположением робота для определения его присутствия в общей области; дезактивация программ движения робота предполагает, что в программировании не существует никакого типа управления для предотвращения столкновений между роботами;
- возможное изменение рабочих программ робота обязательно предполагает согласующееся изменение команд, касающихся блокировки в каждой части программы или программ;
- дополнительное ограничение касается очень частого возможного случая, когда пользователь мог пропустить некоторые команды в рабочей программе (обход, который очень часто делается на начальных этапах программирования для проверки рабочих программ роботов) или когда пользователь мог ошибочно передвинуть курсор в программе, пропуская, например, операции запроса доступа или заполнения области блокировки.
ЦЕЛЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы преодолеть вышеупомянутые недостатки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
С целью достижения упомянутой цели предметом изобретения является способ управления по меньшей мере двумя роботами, имеющими соответствующие рабочие пространства, включающие в себя по меньшей мере одну общую область, в котором обеспечивают центральный электронный блок управления роботами, предусмотренный для взаимодействия с различными роботами и для управления движениями роботов и предотвращающий любой контакт между роботами в их общей рабочей области,
при этом способ, отличающийся тем, что:
- рабочее пространство каждого робота моделируют, принимая во внимание объекты, присутствующие в рабочем пространстве робота, посредством определения одной или более областей контакта (IR), каждая из которых является элементарной геометрической фигурой;
- вышеупомянутые области контакта классифицируются на следующие три различные категории:
- запрещенные области контакта (PIR), определяемые как области пространства, в которых присутствие робота должно независимо от обстоятельств всегда быть запрещено, например, вследствие постоянного присутствия одного или более объектов, с которыми робот не должен контактировать;
- отслеживаемые области контакта (MIR), определяемые как области пространства, в которых присутствие робота допустимо, но управляется, при этом робот выполнен так, что он отправляет сигнал центральному блоку управления всякий раз, когда он входит в отслеживаемую область, и всякий раз, когда он выходит из отслеживаемой области; и
- смешанные области контакта (HIR), определяемые как области пространства, которые способны меняться между статусом отслеживаемой области и статусом запрещенной области, как функция входного сигнала робота, отправляемого упомянутым центральным блоком управления;
- каждый робот выполнен так, что он отправляет центральному блоку управления первый выходной сигнал, служащий в качестве заказа входа, всякий раз, когда он собирается войти в смешанную область, и второй выходной сигнал, служащий в качестве предупреждения входа/присутствия, всякий раз когда он входит в смешанную область; и
- статус каждой смешанной области изменяется динамически для каждого робота во время функционирования роботов посредством отправки от имени центрального блока управления входного сигнала роботу, который представляет смешанную область запрещенной или отслеживаемой для упомянутого робота, в зависимости от того, свободна ли упомянутая смешанная область или нет от других роботов.
Согласно дополнительной характеристике, когда смешанная область переключается для заданного робота в статус запрещенной области посредством отправки упомянутому роботу вышеупомянутого входного сигнала центральным блоком управления, если робот перемещается по направлению к упомянутой области, он замедляется управляемым образом до границы смешанной области, где скорость робота достигает нуля, тогда как когда область повторно становится разрешенной посредством нового входного сигнала роботу, который переводит область в статус отслеживаемой области, система автоматически восстанавливает движение робота без блокировки незаконченного движения робота в случае, когда он все еще движется.
Как можно видеть, способ согласно изобретению по существу отличается тем, что он управляет роботами параллельно, вместо приспособления режима последовательного функционирования известного уровня техники. В частности, способ изобретения, в дополнение к обеспечению управления рабочим пространством каждого робота посредством выходного сигнала от робота, также предусматривает возможность управления активацией/дезактивацией запрета входа в смешанную область с помощью входного сигнала роботу от PLC и, более того, предусматривает возможность определения дополнительного выходного сигнала на PLC для заказа входа в смешанную область. Более того, способ управляет автоматической остановкой и восстановлением движения робота, регулируя скорость его остановки и восстановления таким образом, чтобы предотвратить резкие остановки вблизи границы запрещенной области контакта, и чтобы восстановить движение робота как можно быстрее.
Дополнительные характеристики и преимущества изобретения проявятся из последующего описания со ссылкой на прилагаемые чертежи, которые предоставлены исключительно посредством не ограничивающего примера и на которых:
- Фиг. 1 иллюстрирует блок-схему последовательности операций, уже описанную выше, соответствующую известному уровню техники;
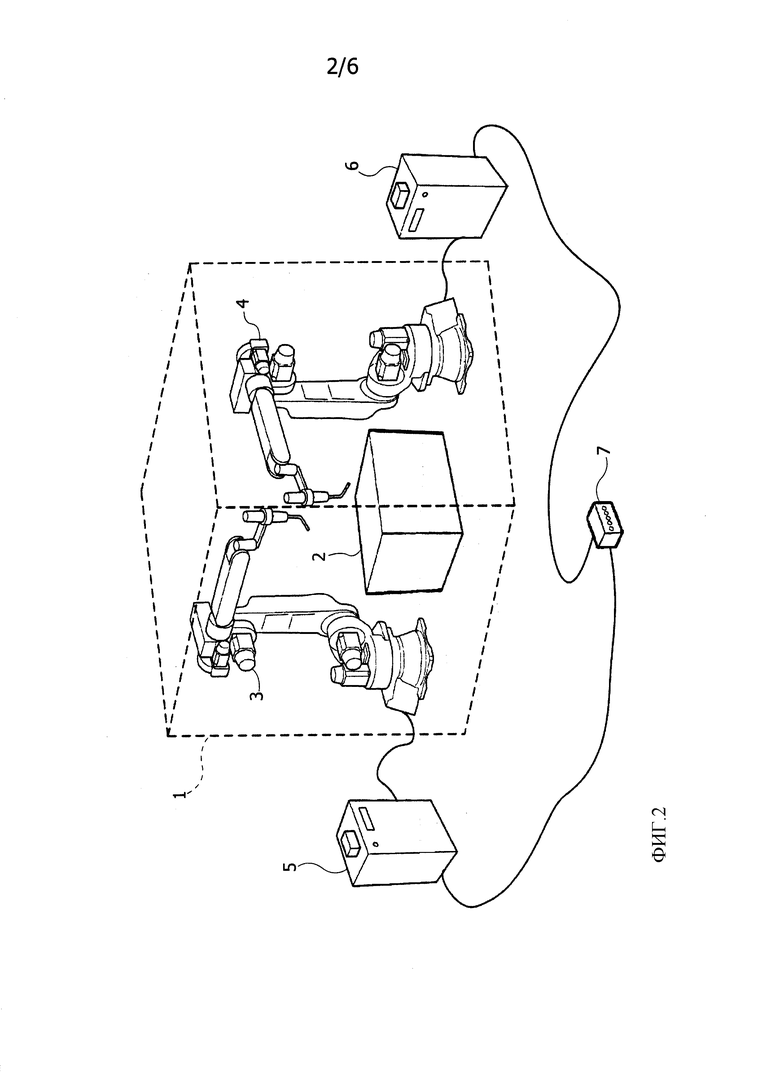
- Фиг. 2 является схематическим изображением в перспективе, которое показывает ячейку с двумя промышленными роботами, имеющими соответствующие рабочие пространства, включающие в себя общие области; и
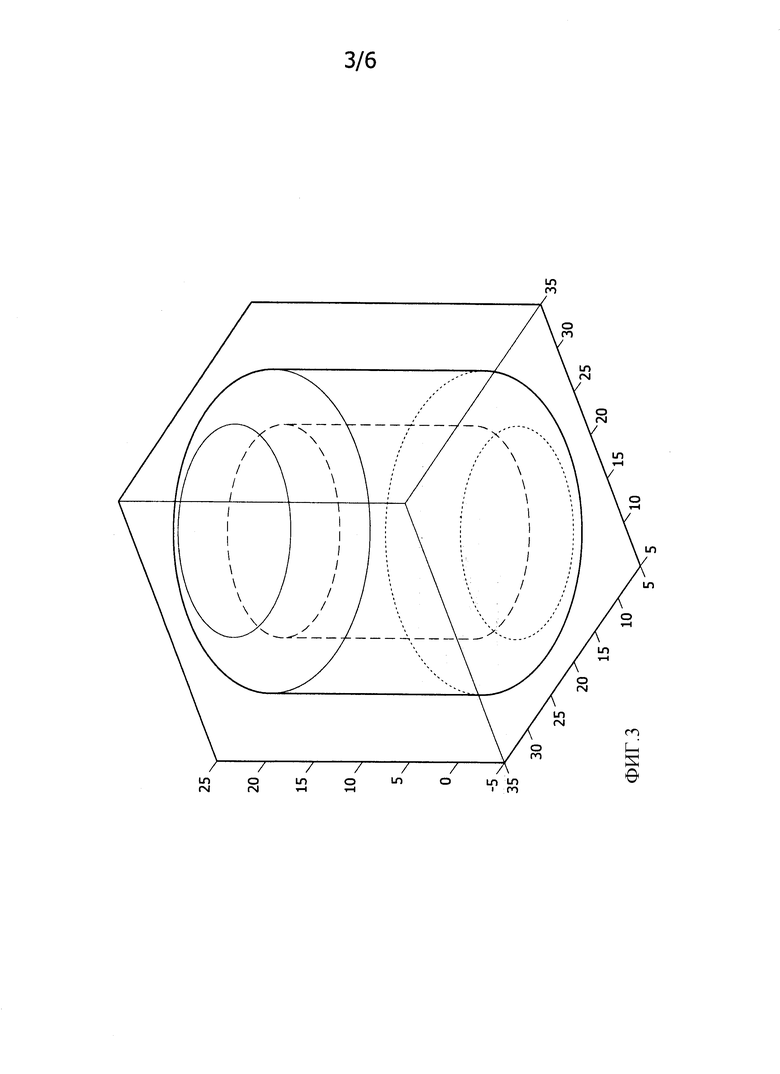
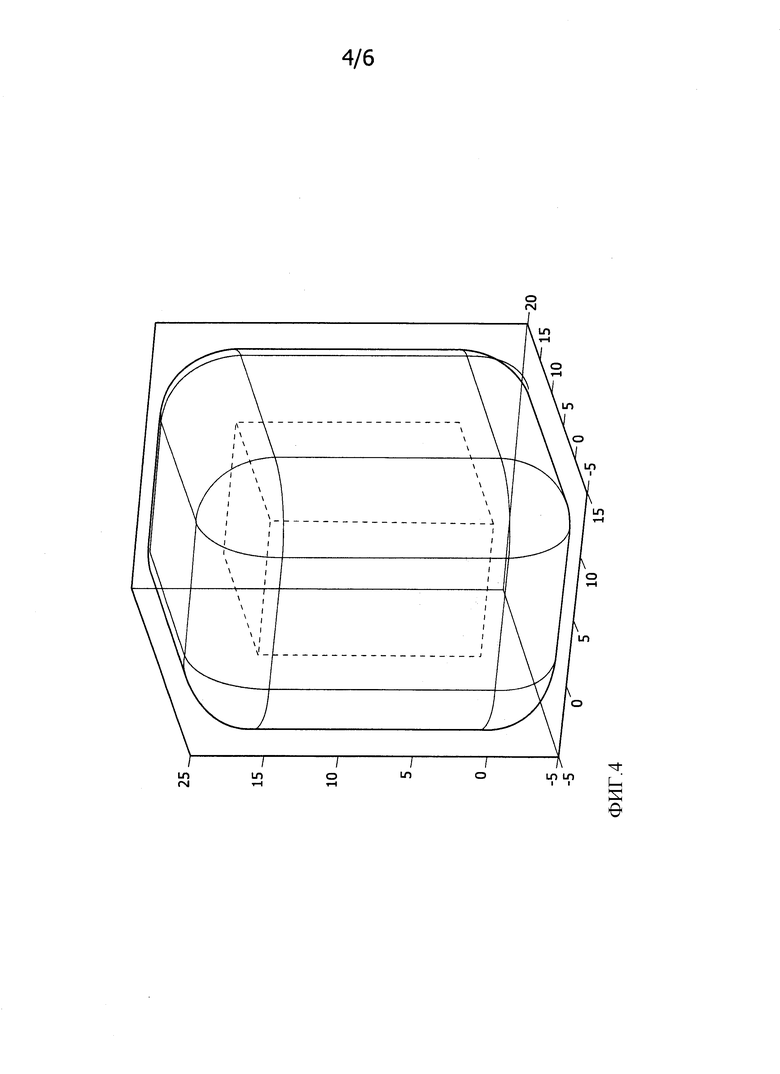
- Фиг. 3-6 показывают различные геометрические фигуры, используемые для определения областей контакта в рабочем пространстве каждого робота.
Со ссылкой на фиг. 2, ячейка 1 предусматривает рабочую станцию с рабочим местом 2, на котором два робота 3, 4 выполняют операции, например, сборки и/или сварки компонентов. Два робота 3, 4 управляются соответственно электронными блоками 5 и 6 управления, которые, в свою очередь, подключены к центральному электронному блоку 7 управления, используемому для осуществления способа согласно изобретению. Центральный блок 7, например, может являться PLC для управления ячейкой 1. Однако функция центрального управления также может быть доверена одному из двух блоков 5, 6 для управления отдельными роботами. Кроме того, в настоящем описании и нижеследующих пунктах формулы изобретения, где упомянутые по меньшей мере два робота, которые могут контактировать друг с другом, также включен случай робота с множеством рук, в котором по меньшей мере две руки управляются отдельно и могут контактировать друг с другом. В данном случае один робот имеет один блок управления, в котором осуществляется способ изобретения.
Роботы 3, 4 имеют соответствующие рабочие пространства, которые включают в себя общие области, которые влекут потенциальный риск контакта между двумя роботами. В рабочих пространствах роботов также присутствуют объекты (например, фиксированное рабочее место 2), которые все вместе формируют недоступные для роботов соответствующие области их рабочего пространства.
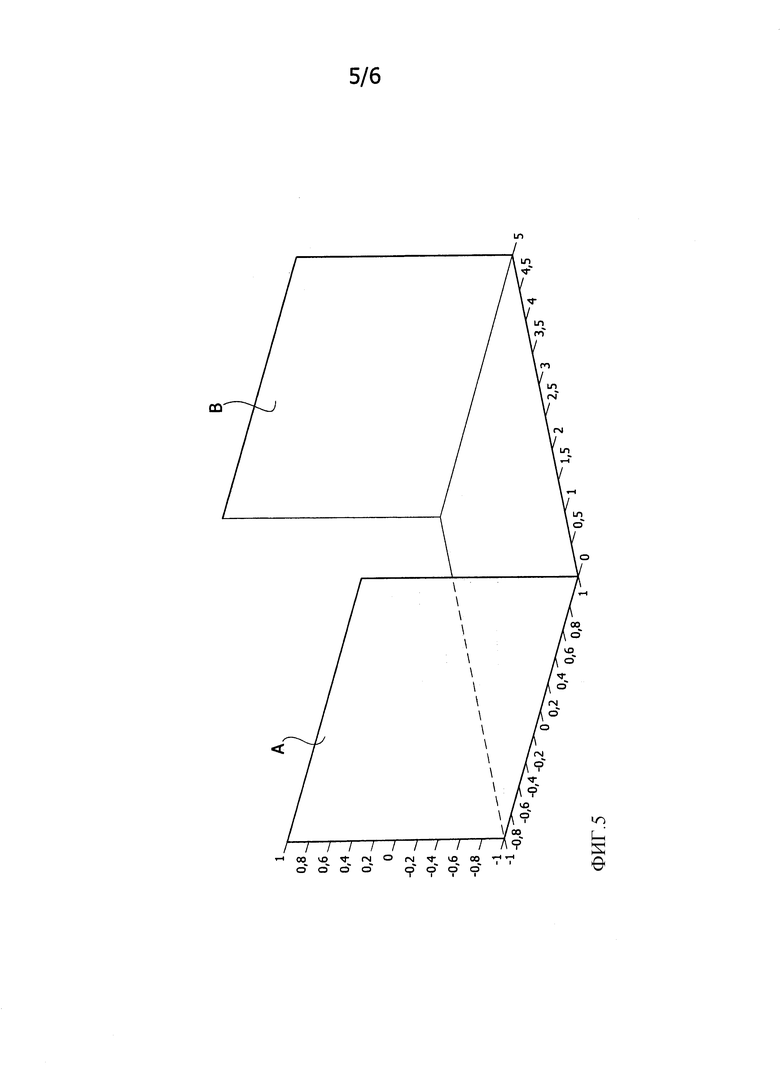
Чтобы справиться с проблемой контакта между каждым роботом и его окружением, согласно изобретению определяются элементарные геометрические фигуры, упоминаемые как области контакта (IR), например, в значительной степени в форме цилиндров (фиг. 3), параллелепипедов (фиг. 4), плоскостей (фиг. 5) или сфер (фиг. 6), в которые можно входить в рабочей области робота таким образом, чтобы иметь пространственное и объемное моделирование, согласующееся с объектами, присутствующими внутри рабочего пространства робота. На фиг. 3, 4 и 6 области контакта являются объемами, представленными штрихованными линиями, содержащимися внутри больших объемов, представленных сплошными линиями, которые служат в качестве «предупреждающих» областей, внутри которых отправляется сигнал о приближении подвижной части робота к границе области контакта. В случае фиг. 5, область контакта является вертикальной плоскостью A. Плоскость B, расположенная напротив нее, устанавливает границу, за которой активируется предупреждающий сигнал.
В способе согласно изобретению возможно определить даже большое количество (например до 16) областей контакта. Согласно изобретению, области контакта классифицируются на следующие три различные категории:
- Отслеживаемые области контакта (MIR)
- Запрещенные области контакта (PIR)
- Смешанные области контакта (HIR)
Отслеживаемые области являются объемами, в которых управляется присутствие роботов, и в случае, когда робот получает доступ к этим областям, будет поднят выходной сигнал к внешней части (например, к PLC), и подобным образом, в случае выхода из области упомянутый сигнал будет опущен (также возможно изменить логику выхода).
Запрещенные области - это объемы, в которых присутствие робота должно быть, независимо от обстоятельств, всегда запрещено. Определение объема этого типа в рабочей области робота влечет за собой постоянное управление местоположением робота таким образом, чтобы предотвратить достижение этой области; это управление осуществляется в любом состоянии робота (программирование робота или автоматическое функционирование робота). Эта процедура предотвращает контакт с объявленной областью/областями контакта посредством автоматического регулирования скорости робота на основании его расстояния от самой области. Сигнал на PLC не будет отправляться, но в случае, когда IR достигается, система будет генерировать ошибку и остановит робота.
Наконец, смешанные области - это объемы, которые могут изменять свой статус с отслеживаемого на запрещенный и наоборот на основании логического состояния входного сигнала. Одновременно возможно определить выходной сигнал, который функционирует, как заказ входа в область, и другой выходной сигнал для доступа в смешанную область. Таким образом, возможно управлять блокировкой универсальным и новаторским способом (по сравнению с предшествующим уровнем техники), как описано в предыдущем абзаце. Когда смешанные области были представлены запрещенными посредством входного сигнала, они, кроме того, представляют характеристику вызова в роботе управляемого замедления на границе области, где скорость робота достигает нуля. Когда область повторно становится разрешенной посредством входного сигнала, так, чтобы она была отслеживаемой, система автоматически восстанавливает движение робота, без блокировки незаконченного движения; при условии, что область отслеживается, в этой точке система будет передавать на внешнюю часть через выходной сигнал присутствие или отсутствие робота внутри области заказа или внутри области контакта.
Благодаря вышеупомянутым мерам изобретение делает возможным улучшенное программирование блокировок.
Возможность определения смешанных областей, которые могут менять свой статус, переходящий от отслеживаемого в запрещенный, делает возможным улучшенное управление «классическими» блокировками, используемыми в реальных роботизированных ячейках. Основной аспект изобретения по существу лежит в возможности определения областей, с различными формами/геометрией, которые могут динамически активироваться и дезактивироваться посредством входного сигнала и которые автоматически управляют настройкой двух типов выходных сигналов: выходной сигнал заказа для входа в общую область и выходной сигнал присутствия в самой общей области. С помощью этих трех сигналов возможно постоянно поддерживать управление политикой доступа PLC, представленной на фиг. 1, (предоставляя не безразличное преимущество в отношении аспектов совместимости с текущими системами), однако радикально упрощая управление блокировками внутри программ роботов. Фактически, после определения смешанных областей контакта (которые, следовательно, представляют рабочее пространство, разделяемое между двумя или более роботами), достаточно связать правильные входные и выходные сигналы с областями контакта, объявленными в программе таким образом, что они могут управляться PLC. Ниже представлен пример программирования сферической смешанной области контакта:
IR_SET(IR_RESERVATION,$FMO[1], 1,1,ON)
IR_SET(IR_PRESENCE,$FMO[1],2,1,OFF)
IR_SET(IR_CONSENT,$FMI[1], 1,1,ON)
IR_CreateSphere(pnt0007P, 200, 1,1)
IR_SWITCH(ON,l)
MOVEFLY JOINT TO pnt0650x ADVANCE
MOVEFLY JOINT TO pnt0150x ADVANCE
MOVEFLY JOINT TO pnt0653x ADVANCE
MOVE JOINT TO wp4661,
WITH CONDITION[spot(1, 4661, 1, FALSE)],
ENDMOVE
MOVEFLY JOINT TO pnt0444x ADVANCE
MOVEFLY JOINT TO pnt0443x ADVANCE
MOVEFLY JOINT TO pnt0442x ADVANCE
MOVE JOINT TO xtn0008X
Первые три команды, указанные выше, служат для объявления того, что область контакта относится к смешанному типу, и чтобы определить, на каких выходных и входных сигналах должны отображаться порты для заказа, присутствия и запроса доступа. Команда IR_CreateSphere(...) имеет цель определения в рабочем пространстве робота сферической смешанной области контакта, с которой связаны выходные и входные сигналы, объявленные ранее. Стоит отметить, что объявление области выполняется только один раз в начале программы и будет исполнять полностью автоматическое управление блокировками, независимо от потока самой программы, в которой больше не будут присутствовать явные команды отправки и ожидания сигналов (в отличие от решения согласно известному уровню техники).
В любых условиях функционирования (на этапе программирования робота или на этапе автоматического функционирования робота), система будет автоматически проверять статус смешанных областей контакта, установленный входящим входным сигналом. Таким образом, если доступ в область контакта запрещен для робота (посредством установки, например, входного сигнала на 0), он не сможет войти в область автономно, в случае, когда, например, на роботе выполняется любое программирование движения, и подобным образом вход также будет запрещен роботу, когда оператор станка, программирующий робота, попытается ввести робота в запрещенную область. Поведение робота в любом случае должно состоять в выполнении управляемого замедления, чтобы замедлить его до нулевой скорости по мере того, как он приближается к запрещенной области контакта, при этом уменьшение общей коррекции пропорционально расстоянию от ближайшей точки между центром инструмента робота и областью контакта.
Нововведение, введенное с помощью смешанных областей контакта, в основном относится к возможности автоматического восстановления движения робота при условии изменения входного сигнала для управления статусом смешанной IR. Другими словами, робот способен автономно восстанавливать движение (с плавным увеличением коррекции), которое предшествовало остановке вблизи запрещенной IR, в случае, когда входной сигнал должен был перейти с 0 (условие запрета входа) на 1 (условие доступа восстановлено).
Как очевидно из вышеприведенного описания, способ согласно изобретению по существу отличается тем, что он управляет роботами параллельно, вместо приспособления режима последовательного функционирования согласно известному уровню техники. В частности, способ согласно изобретению, в дополнение к обеспечению управления рабочим пространством каждого робота посредством выходного сигнала от робота, также предусматривает возможность управления активацией/дезактивацией запрета входа в смешанную область с помощью входного сигнала роботу от PLC и, кроме того, предусматривает возможность определения дополнительного выходного сигнала на PLC для заказа входа в смешанную область. Более того, способ управляет автоматической остановкой и восстановлением движения робота, регулируя скорость его остановки и восстановления таким образом, чтобы предотвратить резкие остановки вблизи границы запрещенной области контакта, и чтобы восстановить движение робота как можно быстрее.
Разумеется, без ущерба принципам изобретения, подробности конструкции и вариантов осуществления могут широко изменяться относительно того, что описано и проиллюстрировано в материалах настоящей заявки исключительно посредством примера без отклонения посредством этого от объема настоящего изобретения.

Изобретение относится к способу управления роботами (3, 4) с соответствующими рабочими пространствами, включающими по меньшей мере одну общую область, с обеспечением управления движениями роботов и предотвращения контакта между ними в их общей области. Рабочее пространство каждого робота моделируют с учетом присутствующих в нем объектов посредством определения одной или более областей контакта. Области контакта классифицируют на три категории: запрещенные области, в которых присутствие робота всегда запрещено, отслеживаемые области, в которых присутствие робота допустимо, при этом робот отправляет сигнал центральному блоку (7) управления при входе и выходе из отслеживаемой области, и смешанные области, меняющиеся между статусом отслеживаемой области и статусом запрещенной области. Предусмотрено отправление каждым роботом блоку (7) первого выходного сигнала, когда он собирается войти в смешанную область, и второго выходного сигнала для предупреждения входа/присутствия, когда он входит в смешанную область. Статус смешанных областей изменяется динамически для каждого робота во время его функционирования. 1 з.п. ф-лы, 6 ил.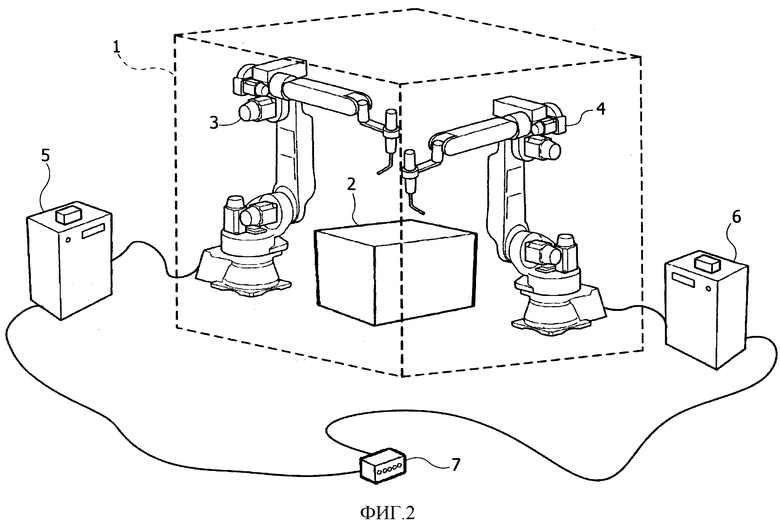
1. Способ управления роботами (3, 4), имеющими соответствующие рабочие пространства, включающие в себя по меньшей мере одну общую область, в котором предварительно обеспечивают центральный электронный блок (7) управления роботами, предусмотренный для взаимодействия с различными роботами (3, 4) и для управления движениями роботов и предотвращающий любой контакт между ними в их общей рабочей области,
отличающийся тем, что:
- рабочее пространство каждого робота моделируют, принимая во внимание объекты, присутствующие в рабочем пространстве робота, посредством определения одной или более областей контакта (IR), каждая из которых является элементарной геометрической фигурой;
- вышеупомянутые области контакта классифицируют на следующие три различные категории:
- запрещенные области контакта (PIR), определяемые как области пространства, в которых присутствие робота должно независимо от обстоятельств всегда быть запрещено, например, вследствие постоянного присутствия одного или более объектов, с которыми робот не должен контактировать;
- отслеживаемые области контакта (MIR), определяемые как области пространства, в которых присутствие робота допустимо и управляется, при этом робот выполнен так, что отправляет сигнал центральному блоку управления всякий раз, когда он входит в отслеживаемую область, и всякий раз, когда он выходит из отслеживаемой области; и
- смешанные области контакта (HIR), определяемые как области пространства, которые способны меняться между статусом отслеживаемой области и статусом запрещенной области, как функция входного сигнала робота, отправляемого упомянутым центральным блоком управления;
- каждый робот (3, 4) выполнен так, что он отправляет центральному блоку (7) управления первый выходной сигнал, служащий в качестве заказа входа, всякий раз, когда он собирается войти в смешанную область, и второй выходной сигнал, служащий в качестве предупреждения входа/присутствия, всякий раз, когда он входит в смешанную область; и
- статус каждой смешанной области изменяют динамически для каждого робота (3, 4) во время функционирования робота посредством отправки с центрального блока (7) управления входного сигнала роботу, который представляет смешанную область запрещенной или отслеживаемой для упомянутого робота, в зависимости от того, свободна ли упомянутая смешанная область или нет от других роботов.
2. Способ по п. 1, отличающийся тем, что когда смешанную область переключают для заданного робота (3, 4) в статус запрещенной области посредством отправки упомянутому роботу вышеупомянутого входного сигнала с центрального блока (7) управления, при условии, что робот перемещается по направлению к упомянутой области, он замедляется управляемым образом до границы смешанной области, в которой скорость робота достигает нуля, причем когда область повторно становится разрешенной посредством нового входного сигнала роботу, который переводит область в статус отслеживаемой области, автоматически восстанавливают движение робота без блокировки незаконченного движения робота в случае, когда он все еще движется.
| JPH 04019084 A, 23.01.1992 | |||
| JPS 59205601 A, 21.11.1984 | |||
| US 5561742 A1, 01.10.1996 | |||
| US 5798627 A1, 25.08.1998 | |||
| ПЕРЕМЕЩЕНИЕ ВИРТУАЛЬНОГО ОБЪЕКТА В ВИРТУАЛЬНОЙ ОКРУЖАЮЩЕЙ СРЕДЕ БЕЗ ВЗАИМНЫХ ПОМЕХ МЕЖДУ ЕГО СОЧЛЕНЕННЫМИ ЭЛЕМЕНТАМИ | 2004 |
|
RU2308762C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |

