Изобретение относится к военной технике, а именно к системам автоматического управления и регулирования, в частности к системам управления и стабилизации вооружения (далее - СУСВ).
Известна система стабилизации основного вооружения объекта 188, представляющая собой стабилизатор вооружения 2Э42-4, который выполнен по схеме электрической принципиальной БС1.370.012 ЭЗ и описанный в БС1.370.012 ТО, ТУ. Данная система стабилизации принята за прототип.
(См. также книгу В.В. Корнеева, М.И. Кузнецова и др. «Основы автоматики и танковые автоматические системы». - М.: Министерство обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.)
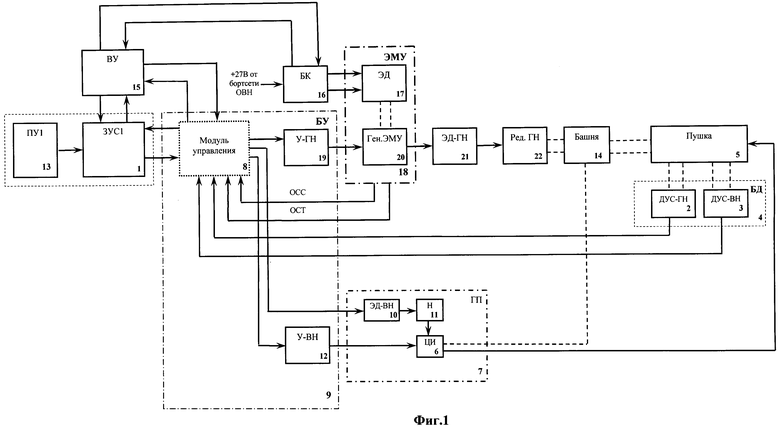
Система стабилизации, в свою очередь, состоит из приводов горизонтального (далее по тексту - ГН) и вертикального (далее по тексту - ВН) наведения и стабилизации, которые выполнены по структурной схеме, изображенной на фиг.1.
Привода ГН и ВН системы стабилизации, принятой за прототип, представляют собой автономные привода, обеспечивающие наведение и стабилизацию основного вооружения танка в плоскостях ГН и ВН по сигналам, поступающим с задающего устройства стабилизации (ЗУС1) 1 и датчиков абсолютной угловой скорости (ДУС-ГН) 2 и (ДУС-ВН) 3 блока датчиков (БД) 4.
Привод ГН выполнен на базе электромеханического привода, привод ВН на базе электрогидравлического привода.
Принципы работы приводов ВН и ГН в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Рассмотрим работу каждого из приводов ВН и ГН в отдельности.
Режим стабилизации по ВН - режим стабилизация пушки по ВН осуществляется относительно сигнала датчика положения зеркала по ВН (ЗУС1) 1, имеющего независимую стабилизацию зеркала в плоскости ВН, что обеспечивается гиростабилизатором (ЗУС1) 1.
При движении танка по пересеченной местности на пушку 5 действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) пушки 5, трения в исполнительном цилиндре (ЦИ) 6 гидропривода ВН (ГП) 7, а также возмущения, обусловленные неуравновешенностью пушки 5 относительно оси цапф.
Эти возмущения вызывают отклонение пушки 5 от заданного сигналом датчика положения зеркала по ВН (ЗУС1) 1 направления. Угол между заданным и действительным направлением пушки 5 в вертикальной плоскости в этом случае определяет ошибку стабилизации гидропривода ВН (ГП) 7. Сигнал, пропорциональный ошибке стабилизации, отрабатывается гидроприводом ВН (ГП) 7 системы стабилизации, поворачивающим пушку в сторону уменьшения ошибки.
Полученная таким образом ошибка стабилизации гидропривода ВН (ГП) 7 обрабатывается аналоговым модулем управления 8 блока управления (БУ) 9 системы стабилизации, одни сигналы с которого управляют включением электродвигателя (ЭД-ВН) 10 гидронасоса (Н) 11 гидропривода ВН (ГП) 7, создающего рабочее давление на входе механизма управления исполнительного гидроцилиндра (ЦИ) 6 гидропривода ВН (ГП) 7, а другие сигналы через усилитель (У-ВН) 12 поступают на управляющий вход механизма управления исполнительного гидроцилиндра (ЦИ) 6 гидропривода ВН (ГП) 7, создающего разность давлений в полостях исполнительного гидроцилиндра (ЦИ) 6, тем самым обеспечивая поворот пушки 5 в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ВН (ЗУС1) 1 и истинным положениями пушки 5 в плоскости ВН.
Для повышения устойчивости привода ВН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ВН системы стабилизации введена обратная связь по абсолютной угловой скорости пушки 5 в плоскости ВН с (ДУС-ВН) 3 блока датчиков (БД) 4, обрабатываемая аналоговым модулем управления 8 блока управления (БУ) 9.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения пушки 5 по ВН осуществляется также по сигналу с датчика положения зеркала по ВН (ЗУС1) 1. При обнаружении цели наводчик пультом управления (ПУ1) 13 наводит стабилизированную в двух плоскостях ВН и ГН линию визирования (прицельную марку) (ЗУС1) 1 на цель в плоскости ВН. Сигнал с датчика положения зеркала по ВН (ЗУС1) 1, пропорциональный ошибке стабилизации по ВН, поступает на вход (БУ) 9, где происходит его преобразование, как описано выше. Гидропривод ВН (ГП) 7 поворачивает пушку 5 в сторону уменьшения ошибки по ВН аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Для компенсации скоростной ошибки в плоскости ВН сигнал с (ПУ1) 13 через (ЗУС1) 1 поступает в модуль управления 8 блока управления (БУ) 9.
Режим стабилизации по ГН - режим стабилизация пушки по ГН осуществляется относительно сигнала датчика положения зеркала по ГН (ЗУС1) 1, имеющего независимую стабилизацию зеркала в плоскости ГН, что обеспечивается гидростабилизатором (ЗУС1) 1.
При движении танка по пересеченной местности на башню 14 (пушку 5) действуют внешние возмущения в виде колебаний корпуса танка, трения в погоне башни 14, а также возмущения, обусловленные неуравновешенностью башни 14 относительно оси вращения.
Эти возмущения вызывают отклонение башни 14 (пушки 5) от заданного сигналом датчика положения зеркала по ГН (ЗУС1) 1 направления. Угол между заданным и действительным направлением башни 14 (пушки 5) в горизонтальной плоскости в этом случае определяет ошибку стабилизации привода ГН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ГН системы стабилизации, поворачивающим башню 14 (пушку 5) в сторону уменьшения ошибки.
Полученная таким образом ошибка стабилизации привода ГН обрабатывается аналоговым модулем управления 8 блока управления (БУ) 9 системы стабилизации, одни сигналы с которого через внешние устройства (ВУ) 15 управляют включением блока коммутации (БК) 16 привода ГН, запускающего приводной электродвигатель (ЭД) 17 электромашинного усилителя (ЭМУ) 18, а другие сигналы через усилитель (У-ГН) 19 блока управления (БУ) 9 поступают на обмотки управления генератора (Ген. ЭМУ) 20 электромашинного усилителя (ЭМУ) 18, формируя в них разность токов, в соответствии с величиной и знаком которых (Ген. ЭМУ) 20 вырабатывает напряжение, под действием которого исполнительный электродвигатель (ЭД-ГН) 21 через редуктор (Ред. ГН) 22 поворачивает башню 14 (пушку 5) танка в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ГН (ЗУС1) 1 и истинным положениями башни 14 (пушки 5) в горизонтальной плоскости.
Для повышения устойчивости привода ГН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ГН системы стабилизации введены обратные связи по току ОСТ (ЭД-ГН) 21, по скорости ОСС (ЭД-ГН) 21, вырабатываемые (ЭМУ) 18, и по абсолютной угловой скорости башни 14 (пушки 5) в плоскости ГН с (ДУС-ГН) 2 блока датчиков (БД) 4, обрабатываемые аналоговым модулем управления 8 блока управления (БУ) 9.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения башни 14 (пушки 5) по ГН осуществляется также по сигналу с датчика положения зеркала по ГН (ЗУС1) 1. При обнаружении цели наводчик пультом управления (ПУ1) 13 наводит стабилизированную в двух плоскостях (ВН и ГН) линию визирования (прицельную марку) (ЗУС1) 1 на цель в плоскости ГН. Сигнал с датчика положения зеркала по ГН (ЗУС1) 1, пропорциональный ошибке стабилизации по ГН, поступает на вход (БУ) 9, где происходит его преобразование, как описано выше. Исполнительный электродвигатель (ЭД-ГН) 21 через редуктор (Ред. ГН) 22 поворачивает башню 14 (пушку 5) танка в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Для компенсации скоростной ошибки в плоскости ГН сигнал с (ПУ1) 13 через (ЗУС1) 1 поступает в модуль управления 8 блока управления (БУ) 9.
Другие сигналы с внешних устройств (ВУ) 15, связанные с (ЗУС1) 1, блоком коммутации (БК) 16 и с модулем управления 8 блока управления (БУ) 9, представляют собой сигналы с комплекса приборов и узлов, входящих как в систему стабилизации, так и в оборудование танка в целом.
Недостатками вышеуказанной конструкции системы стабилизации - прототипа являются:
1. Использование морально устаревшего электромашинного привода ГН, имеющего следующие недостатки:
- отсутствует возможность получения более высоких показателей по точности стабилизации пушки в плоскости ГН;
- отсутствует возможность получения максимальной скорости переброса и отработки более (18-24)%, что недостаточно при работе в режиме целеуказания и при движении танка по пересеченной местности с резкими маневрированиями его шасси (корпуса);
- малый ресурс и сложность в обслуживании из-за наличия как в конструкции ЭМУ, так и в конструкции электродвигателя (ЭД-ГН) коллекторов со щеточными узлами, что требует дополнительного периодического их обслуживания с заменой износившихся щеток;
- искрение в зоне коллекторного узла ЭМУ и (ЭД-ГН), что при определенной боевой ситуации может привести к пожару внутри танка;
- негерметичность конструкции ЭМУ и (ЭД-ГН), что также накладывает ограничения при их эксплуатации в случае попадания внутрь их корпуса воды;
- повышенный шум в боевом отделении от вращающихся частей электродвигателя и генератора, входящих в состав ЭМУ, а также вентилятора обдува исполнительного (ЭД-ГН);
- низкий КПД электромашинного привода в целом, потребляющего значительный ток, даже в отсутствие вращения вала исполнительного электродвигателя привода ГН;
2. Использование гидропривода ВН старой конструкции и имеющего следующие недостатки:
- отсутствует возможность получения более высоких показателей по точности стабилизации пушки в плоскости ВН;
- отсутствует возможность получения максимальной скорости переброса и отработки более (24-27)% в плоскости ВН, что недостаточно при движении танка по пересеченной местности, имеющей резкие уклоны и подъемы;
- отсутствует возможность адаптивного управления скоростью вращения вала приводного электродвигателя гидронасоса гидропривода ВН в зависимости от условий его работы;
- отсутствует обратная связь по скорости вращения вала приводного электродвигателя гидронасоса гидропривода ВН, позволяющая формировать жесткую механическую характеристику электродвигателя в заданном блоком управления диапазоне частот вращения его вала;
3. Использование аналоговых контуров коррекции и управления исполнительными приводами ГН и ВН, не позволяющих применять адаптивные и оптимальные алгоритмы управления системой стабилизации, гибко (без значительной переделки модуля управления системой стабилизации) менять ее параметры при изменении механических параметров танка в процессе его эксплуатации.
4. Отсутствие цифровых информационных каналов обмена как во внутренней структуре системы стабилизации - прототипа, так и при обмене с внешними устройствами танка, что не позволяет повысить эксплутационные характеристики указанной системы, точность ее диагностики, настройку и возможность установки на другие танки без существенной доработки. Отсутствие цифровых информационных каналов обмена одновременно не позволяет получить и дополнительные сигналы с датчиковой аппаратуры танка (внешних устройств), что также не дает возможность включения этих сигналов в контуры управления приводами ВН и ГН системы стабилизации в виде дополнительных обратных связей, а значит, не позволяет поднять устойчивость и добротность контуров их управления, тем самым исключая возможность повышения точности стабилизации вооружения и возможности ее поддержания в течение всего жизненного цикла работы системы стабилизации в составе танка.
5. Отсутствие возможности работы системы стабилизации с несколькими прицельными комплексами и другими дополнительными системами, приборами и датчиками, устанавливаемыми при необходимости на танк по требованию заказчика.
6. Отсутствие дополнительного (независимого) режима стабилизации вооружения танка в случае отказа его основного прицельного комплекса.
Техническими задачами заявляемого изобретения являются:
- повышение надежности СУСВ;
- повышение эксплутационных показателей СУСВ;
- повышение эксплутационной интероперабельности СУСВ;
- повышение точности стабилизации по ВН и ГН СУСВ;
- расширение функциональных возможностей СУСВ;
- увеличение живучести СУСВ, а с ним и объекта военного назначения (далее по тексту - ОВН).
Для достижения указанного технического результата в известную систему стабилизации, содержащую установленное вооружение с закрепленными на нем блоком датчиков с датчиками абсолютной угловой скорости по ВН и ГН, боевой модуль (башню) с установленным на нем вооружением, электродвигатель гидропривода ВН, гидронасос гидропривода ВН, цилиндр исполнительный гидропривода ВН, механически связанный с установленным вооружением и боевым модулем и гидравлически с гидронасосом гидропривода ВН, редуктор ГН, механически связанный с боевым модулем и электродвигателем ГН, электродвигатель ГН, первый пульт управления, первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, электрически связанное с первым пультом управления, внешние устройства, электрически связанные с первым задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок управления, электрически связанный с внешними устройствами, согласно изобретению дополнительно введены:
- второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН;
- второй пульт управления;
- первая и вторая панели видеосмотрового устройства (ВСУ);
- информационно-управляющая система вооружения (ИУСВ);
- усилитель мощности ГН, включающий в себя:
- преобразователь напряжения;
- контроллер широтно-импульсного модулятора (ШИМ) усилителя ГН;
- широтно-импульсный модулятор ГН;
- усилитель ГН;
- датчик тока усилителя ГН;
- датчик скорости вала электродвигателя ГН;
- блок силовых ключей;
- формирователь сигналов последовательной шины усилителя ГН;
- электромагнит механизма поворота боевого модуля;
- корпус объекта военного назначения;
- датчик абсолютной угловой скорости корпуса (ДУС-К), включающий в себя:
- датчик абсолютной угловой скорости (ДУС);
- формирователь сигналов последовательной шины ДУС-К;
- датчик положения боевого модуля по ГН;
- датчик положения установленного вооружения по ВН;
- датчик угловых ускорений (ДУУ), включающий в себя:
- измеритель угловых ускорений в плоскости ГН;
- измеритель угловых ускорений в плоскости ВН;
- формирователь сигналов последовательной шины ДУУ;
- первая последовательная шина;
- вторая последовательная шина;
- третья последовательная шина;
при этом блок управления выполнен цифровым и содержит:
- первый формирователь сигналов последовательной шины;
- второй формирователь сигналов последовательной шины;
- третий формирователь сигналов последовательной шины;
- контроллер вычисления сигналов управления;
- усилитель широтно-импульсного модулятора механизма управления цилиндра исполнительного;
причем блок датчиков дополнительно содержит формирователь сигналов последовательной шины установленных в нем датчиков абсолютной угловой скорости по ГН и ВН, а в гидропривод дополнительно введены:
- усилитель мощности ВН;
- датчик скорости вала электродвигателя ВН;
- контроллер вычисления ШИМ усилителя ВН;
- широтно-импульсный модулятор ВН;
- усилитель ВН;
- датчик тока усилителя ВН;
- формирователь сигналов последовательной шины усилителя ВН усилителя мощности ВН;
при этом первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН электрически связано с первым видеосмотровым устройством, а второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН электрически связано со вторым пультом управления по ВН и ГН, вторым видеосмотровым устройством и внешними устройствами причем,
первое и второе видеосмотровые устройства, первый и второй пульты управления по ВН и ГН, первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, а также информационно-управляющая система вооружения электрически связаны с первой последовательной шиной, которая, в свою очередь, электрически связана с первым формирователем сигналов последовательной шины блока управления, с датчиком положения боевого модуля, кинематически связанным с погоном боевого модуля и с датчиком положения установленного вооружения, кинематически связанным с осью вращения установленного вооружения,
при этом внешние устройства электрически связаны с контроллером вычисления сигналов управления блока управления, который, в свою очередь, связан с первым, вторым и третьим формирователями сигналов последовательной шины блока управления и усилителем широтно-импульсного модулятора механизма управления цилиндра исполнительного блока управления, причем
второй формирователь сигналов последовательной шины блока управления через вторую последовательную шину электрически связан с формирователями сигналов последовательной шины усилителя ГН и усилителя ВН, соответственно усилителя мощности ГН и усилителя мощности ВН,
а третий формирователь сигналов последовательной шины блока управления через третью последовательную шину электрически связан с формирователем сигналов последовательной шины датчика угловых ускорений, механически связанного через корпус датчика угловых ускорений с боевым модулем, с формирователем сигналов последовательной шины блока датчиков и с формирователем сигналов последовательной шины датчика угловой скорости корпуса, механически связанного через корпус датчика угловой скорости корпуса с корпусом ОВН, который в свою очередь через вращающийся погон механически связан с боевым модулем объекта военного назначения,
при этом формирователь сигналов последовательной шины датчика угловых ускорений электрически связан с измерителями угловых ускорений по ГН и ВН, формирователь сигналов последовательной шины блока датчиков электрически связан с датчиками абсолютной угловой скорости по ГН и ВН, а формирователь сигналов последовательной шины датчика угловой скорости корпуса электрически связан с датчиком абсолютной угловой скорости,
при этом с одной стороны формирователь сигналов последовательной шины усилителя ГН усилителя мощности ГН электрически связан с контроллером широтно-импульсного модулятора усилителя ГН, связанного с преобразователем напряжения, с широтно-импульсным модулятором ГН и блоком силовых ключей, при этом широтно-импульсный модулятор ГН, в свою очередь, связан с входом усилителя ГН усилителя мощности ГН, первый выход которого электрически связан с электродвигателем ГН, а второй и третий выходы соответственно электрически связаны с датчиком тока усилителя ГН и датчиком скорости вала электродвигателя ГН, выходы которых соответственно электрически соединены с входами контроллера широтно-импульсного модулятора усилителя ГН, а один из входов преобразователя напряжения, в свою очередь, соединен с бортовой сетью ОВН, а его высоковольтный выход соединен с усилителем ГН усилителя мощности ГН, вращающим вал электродвигателя ГН, который через редуктор ГН, механически связанный с электромагнитом механизма поворота боевого модуля, поворачивает боевой модуль с установленным вооружением в соответствии с заданным первым или вторым задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и выработанное контроллером вычисления сигналов управления сигналом управления по ГН угловое положение при разрешающем сигнале с блока силовых ключей, электрически связанного с электромагнитом механизма поворота боевого модуля и внешними устройствами,
с другой стороны формирователь сигналов последовательной шины усилителя ВН усилителя мощности ВН гидропривода ВН электрически связан с контроллером широтно-импульсного модулятора усилителя ВН, связанного, в свою очередь, с широтно-импульсным модулятором ВН, выход которого связан с усилителем ВН усилителя мощности ВН, первый выход которого электрически соединен с датчиком тока усилителя ВН, выход которого электрически связан с входом контроллера широтно-импульсного модулятора усилителя ВН, а второй выход усилителя ВН электрически связан с электродвигателем ВН, вал которого электрически связан с датчиком скорости вращения вала электродвигателя ВН и механически с гидронасосом гидропривода ВН, причем усилитель ВН усилителя мощности ВН соединен с бортовой сетью ОВН, а гидронасос гидропривода ВН гидравлически связан с цилиндром исполнительным гидропривода ВН, который, в свою очередь, электрически связан с усилителем широтно-импульсного модулятора механизма управления цилиндра исполнительного блока управления и кинематически связан одним концом с корпусом боевого модуля, а другим концом с установленным вооружением, поворачивая его относительно боевого модуля в плоскости ВН, в соответствии с заданным первым или вторым задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и выработанное контроллером вычисления сигналов управления сигналом управления по ВН угловое положение.
Сопоставительный анализ с прототипом показывает, что заявляемая СУ СВ отличается наличием новых элементов, а именно:
- второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН;
- второй пульт управления;
- первая и вторая панели видеосмотрового устройства (ВСУ);
- информационно-управляющая система вооружения (ИУСВ)
- усилитель мощности ГН, включающий в себя:
- преобразователь напряжения;
- контроллер широтно-импульсного модулятора (ШИМ) усилителя ГН;
- широтно-импульсный модулятор ГН;
- усилитель ГН;
- датчик тока усилителя ГН;
- датчик скорости вала электродвигателя ГН;
- блок силовых ключей;
- формирователь сигналов последовательной шины усилителя ГН;
- электромагнит механизма поворота боевого модуля (ММПБМ);
- корпус ОВН;
- датчик абсолютной угловой скорости корпуса (ДУС-К), включающий в себя:
- датчик абсолютной угловой скорости (ДУС);
- формирователь сигналов последовательной шины (ДУС-К);
- датчик положения боевого модуля по ГН;
- датчик положения установленного вооружения по ВН;
- датчик угловых ускорений (ДУУ), включающий в себя:
- измеритель угловых ускорений в плоскости ГН;
- измеритель угловых ускорений в плоскости ВН;
- формирователь сигналов последовательной шины (ДУУ);
- первая последовательная шина;
- вторая последовательная шина;
- третья последовательная шина;
- блок управления, включающий в себя:
- первый формирователь сигналов последовательной шины;
- второй формирователь сигналов последовательной шины;
- третий формирователь сигналов последовательной шины;
- контроллер вычисления сигналов управления;
- усилитель широтно-импульсного модулятора механизма управления цилиндра исполнительного;
- в блок датчиков дополнительно введен:
- формирователь сигналов последовательной шины блока датчиков;
- в гидропривод дополнительно введены:
- усилитель мощности ВН;
- датчик скорости вала электродвигателя ВН;
- контроллер вычисления ШИМ усилителя ВН;
- широтно-импульсный модулятор ВН;
- усилитель ВН;
- датчик тока усилителя ВН;
- формирователь сигналов последовательной шины усилителя ВН усилителя мощности ВН;
и их связями с другими элементами СУСВ и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в СУСВ позволяет:
- повысить надежность СУСВ за счет замены устаревшего электромашинного привода ГН на современный электропривод с векторным управлением исполнительным электродвигателем ГН, позволяющий исключить недостатки электромашинного привода ГН системы стабилизации - прототипа;
- повысить эксплутационные показатели СУСВ за счет введения цифровых контуров управления и коррекции приводами ГН и ВН, что позволяет применить адаптивные и оптимальные алгоритмы управления СУСВ, гибко менять ее параметры при изменении механических параметров ОВН в процессе его эксплуатации;
- повысить эксплутационную интероперабельность СУСВ за счет введения в ее структуру цифровых информационных каналов обмена с внешними устройствами объекта военного назначения, что позволяет резко повысить эксплутационные характеристики СУСВ и возможность ее установки на другие ОВН без существенной доработки. Повышение эксплутационной интероперабельности также достигается введением во внутреннюю структуру СУСВ дополнительных цифровых информационных каналов, позволяющих проводить настройку и диагностику СУСВ, как при помощи внешних устройств диагностики и настройки, подключаемых к контрольному разъему блока управления СУСВ, так и при помощи встроенных средств диагностики и настройки ОВН, в частности через видеосмотровые устройства;
- повысить точность стабилизации по ВН и ГН за счет введения в контуры управления приводами ВН и ГН СУСВ дополнительных сигналов обратных связей с датчиковой аппаратуры ОВН, таких как ДУУ, ДУС-К, ДПБМ, ДПВ, получаемых по цифровым информационным каналам обмена, что позволяет поднять устойчивость и добротность контуров управления приводами ВН и ГН. Это дает возможность в сумме с новым электроприводом ГН и новым гидроприводом ВН СУСВ повысить точность стабилизации не менее чем на (25-30)%, а также увеличить скорость переброса и отработки по ВН и ГН (до величины не менее 40-45%);
- расширить функциональные возможности СУСВ, такие как введение режима стабилизированного целеуказания, за счет введения в ее структуру дополнительных устройств (второй пульт управления, второе панорамное задающее устройство стабилизации), позволяющих обеспечить ее работу с несколькими прицельными комплексами, имеющими независимую двухплоскостную стабилизацию линии визирования;
- увеличить живучесть ОВН за счет введения в структуру СУСВ дополнительных устройств (второй пульт управления, второе панорамное задающее устройство стабилизации), позволяющих обеспечить ее работу в случае отказа основного прицельного комплекса ОВН (первого задающего устройства стабилизации).
Изобретение может найти применение в конструкции танков, боевых машин пехоты, бронетранспортеров и позволяет за счет применения новых приборов и узлов, построенных на цифровой платформе, расположить оператора управления вооружением, внешние задающие устройства стабилизации и само вооружение на расстоянии друг от друга. Это позволяет расширить конструктивные и боевые возможности, боевую мощь, надежность, живучесть, улучшить технические и эксплутационные характеристики, решить вопросы по настройке и оперативной диагностике объекта применения с предлагаемой изобретением системой, а также значительно повысить безопасность оператора (экипажа) в реальных боевых условиях.
На фиг.1 приведена структурная схема системы стабилизации - прототипа 2Э42-4 танка Т-90; на фиг.2 приведена заявляемая структурная схема системы управления и стабилизации вооружения.
Сокращения, принятые в тексте и на фиг.1 и фиг.2:
БД - блок датчиков (на фиг.2 - поз.22);
БК - блок коммутации;
БМ - боевой модуль (на фиг.2 - поз.8);
БСК - блок силовых ключей (на фиг.2 - поз.35);
БУ - блок управления (на фиг.2 - поз.13);
В - установленное вооружение (на фиг.2 - поз.23);
ВСУ1 - видеосмотровое устройство первое (на фиг.2 - поз.5);
ВСУ2 - видеосмотровое устройство второе (на фиг.2 - поз.6);
ВУ - внешние устройства (на фиг.2 - поз.7);
ГП - гидропривод ВН (на фиг.2 - поз.53);
Ген. ЭМУ - генератор электромашинного усилителя;
ДПБМ - датчик положения боевого модуля по ГН (на фиг.2 - поз.11);
ДПВ - датчик положения установленного вооружение по ВН (на фиг.2 - поз.42);
ДСВ - датчик скорости вала электродвигателя ВН (на фиг.2 - поз.56);
ДТ ВН - датчик тока усилителя ВН (на фиг.2 - поз.55);
ДТ ГН - датчик тока усилителя ГН (на фиг.2 - поз.40);
ДУС - датчик абсолютной угловой скорости (на фиг.2 - поз.31);
ДУС-ВН - датчик абсолютной угловой скорости по ВН (на фиг.2 - поз.46);
ДУС-ГН - датчик абсолютной угловой скорости по ГН (на фиг.2 - поз.24);
ДУС-К - датчик абсолютной угловой скорости корпуса (на фиг.2 - поз.29);
ДУУ - датчик угловых ускорений (на фиг.2 - поз.26);
ЗУС1 - первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (на фиг.2 - поз.3);
ЗУС2 - второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (на фиг.2 - поз.4);
ИУСВ - информационно-управляющая система вооружения (на фиг.2 - поз.10);
ИУУВН - измеритель угловых ускорений ВН (на фиг.2 - поз.47);
ИУУГН - измеритель угловых ускорений ГН (на фиг.2 - поз.27);
К - корпус ОВН (на фиг.2 - поз.30);
КВСУ - контроллер вычисления сигналов управления (на фиг.2 - поз.14);
КШИМ УГН - контроллер вычисления ШИМ усилителя ГН (на фиг.2 -поз.32);
КШИМ УВН - контроллер вычисления ШИМ усилителя ВН (на фиг.2 - поз.48);
ММПБМ - электромагнит механизма поворота боевого модуля (на фиг.2 - поз.36);
Н - гидронасос гидропривода ВН (на фиг.2 - поз.52);
ОВН - объект военного назначения;
ОСС - обратная связь по скорости;
ОСТ - обратная связь по току;
ПУ1 - первый пульт управления (на фиг.2 - поз.1);
ПУ2 - второй пульт управления (на фиг.2 - поз.2);
ПН - преобразователь напряжения усилителя мощности ГН (на фиг.2 - поз.34);
ПШ1 - первая последовательная шина (на фиг.2 - поз.9);
ПШ2 - вторая последовательная шина (на фиг.2 - поз.17);
ПШ3 - третья последовательная шина (на фиг.2 - поз.20);
Ред. ГН - редуктор привода ГН (на фиг.2 - поз.37);
СК ГН - датчик скорости вала электродвигателя ГН (на фиг.2 - поз.41);
У-ВН - усилитель ВН (на фиг.2 - поз.50);
У-ГН - усилитель ГН (на фиг.2 - поз.38);
УМВН - усилитель мощности ВН (на фиг.2 - поз.45);
УМГН - усилитель мощности ГН (на фиг.2 - поз.19);
У-ШИМ МУ - усилитель широтно-импульсного модулятора механизма управления цилиндра исполнительного (на фиг.2 - поз.43);
ФСПШ1 - первый формирователь сигналов последовательной шины (на фиг.2 - поз.12);
ФСПШ2 - второй формирователь сигналов последовательной шины (на фиг.2 - поз.15);
ФСПШ3 - третий формирователь сигналов последовательной шины (на фиг.2 - поз.16);
ФСПШ БД - формирователь сигналов последовательной шины блока датчиков (на фиг.2 - поз.21);
ФСПШ ДУС-К - формирователь сигналов последовательной шины ДУС-К (на фиг.2 - поз.28);
ФСПШ ДУУ - формирователь сигналов последовательной шины ДУУ (на фиг.2 - поз.25);
ФСПШ УВН - формирователь сигналов последовательной шины усилителя ВН (на фиг.2 - поз.44);
ФСПШ УГН - формирователь сигналов последовательной шины усилителя ГН (на фиг.2 - поз.18);
ЦИ - цилиндр исполнительный привода ВН (на фиг.2 - поз.54);
ШИМ ВН - широтно-импульсный модулятор ВН (на фиг.2 - поз.49);
ШИМ ГН - широтно-импульсный модулятор ГН (на фиг.2 - поз.33);
ЭД-ВН - приводной электродвигатель гидронасоса гидропривода ВН (на фиг.2 - поз.51);
ЭД-ГН - электродвигатель привода ГН (на фиг.2 - поз.39).
СУСВ работает следующим образом.
Заявляемая СУСВ представляет собой автономно работающие привода управления, наведения и стабилизации боевого модуля и установленного вооружения в плоскостях ГН и ВН.
Привод ГН содержит первый (ПУ1) 1 и второй (ПУ2) 2 пульты управления с чувствительными элементами наведения в плоскости ГН. Первое (ЗУС1) 3 и второе панорамное (ЗУС2) 4 задающие устройства стабилизации с датчиками положения (угла) независимо стабилизированного положения зеркала прицела по ГН, электрически связанные соответственно с первым (ПУ1) 1 и вторым (ПУ2) 2 пультами управления по ГН, а также соответственно с первым видеосмотровым устройством (ВСУ1) 5 и вторым видеосмотровым устройством (ВСУ2) 6, и с внешними устройствами (ВУ) 7 и жестко связанные с боевым модулем (БМ) 8.
Сигналы с выходов пультов управления по ГН (ПУ1) 1 и (ПУ2) 2, сигналы с первого (ЗУС1) 3 и второго панорамного (ЗУС2) 4 задающих устройств стабилизации с датчиками положения (угла) независимо стабилизированного положения зеркала прицела по ГН, а также сигналы с видеосмотровых устройств (ВСУ1) 5 и (ВСУ2) 6 связаны с первой последовательной шиной (ПШ1) 9, представляющей собой линию передачи сигналов последовательного протокола CAN. Информационно-управляющая система вооружения (ИУСВ) 10 электрически связана с первой последовательной шиной (ПШ1) 9 и через (ПШ1) 9 с датчиком положения боевого модуля (ДПБМ) 11, который кинематически связан с погоном боевого модуля (БМ) 8, и представляет собой датчик типа «вращающийся трансформатор», устанавливаемый на погон боевого модуля, с редуктором, обеспечивающим поворот на 360 градусов при соответствующем повороте боевого модуля и встроенный контроллер преобразования аналогового сигнала в сигнал по протоколу CAN.
Устройства (ПУ1) 1, (ПУ2) 2, (ВСУ1) 5, (ВСУ2) 6, (ИУСВ) 10, (ЗУС1) 3, (ЗУС2) 4, (ДПБМ) 11 электрически связаны с первой последовательной шиной (ПШ1) 9 и через (ПШ1) 9 с первым формирователем сигналов последовательной шины (ФСПШ1) 12 блока управления (БУ) 13, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, который, в свою очередь, связан с контроллером вычисления сигналов управления (КВСУ) 14, представляющим собой процессорный модуль обработки сигналов.
В свою очередь (КВСУ) 14 связан со вторым формирователем сигналов последовательной шины (ФСПШ 2) 15, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422, третьим формирователем сигналов последовательной шины (ФСПШ3) 16, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, а также с внешними устройствами (ВУ) 7 через дублированную линию передачи сигналов последовательных протоколов CAN и «Манчестер».
Второй формирователь сигналов последовательной шины (ФСПШ2) 15 блока управления 13 электрически связан со второй последовательной шиной (ПШ2) 17, представляющей собой дублированную линию передачи сигналов последовательных протоколов CAN и RS422, и через нее с формирователем сигналов последовательной шины усилителя ГН (ФСПШ УГН) 18 усилителя мощности ГН (УМГН) 19, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422.
Третий формирователь сигналов последовательной шины (ФСПШ3) 16 блока управления (БУ) 13 электрически связан с третьей последовательной шиной (ПШ3) 20, представляющей собой линию передачи сигналов последовательного протокола CAN, и через нее обменивается информацией с:
- формирователем сигналов последовательной шины блока датчиков (ФСПШ БД) 21 блока датчиков (БД) 22, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, жестко связанного с установленным вооружением (В) 23. (ФСПШ БД) 21 блока датчиков (БД) 22 электрически связан с датчиком абсолютной угловой скорости по ГН (ДУС-ГН) 24;
- формирователем сигналов последовательной шины датчика угловых ускорений (ФСПШ ДУУ) 25 датчика угловых ускорений (ДУУ) 26, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, жестко связанного с боевым модулем (БМ) 8. (ФСПШ ДУУ) 25 датчика угловых ускорений (ДУУ) 26 электрически связан с измерителем угловых ускорений в плоскости ГН (ИУУГН) 27;
- формирователем сигналов последовательной шины датчика абсолютной угловой скорости корпуса (ФСПШ ДУС-К) 28 датчика абсолютной угловой скорости корпуса (ДУС-К) 29, представляющим собой контроллер для обработки сигналов по протоколу типа CAN, жестко связанного с корпусом (К) 30 ОВН. (ФСПШ ДУС-К) 28 датчика абсолютной угловой скорости корпуса (ДУС-К) 29 электрически связан с датчиком абсолютной угловой скорости по ГН (ДУС) 31.
(ФСПШ УГН) 18 усилителя мощности ГН (УМГН) 19 электрически связан с контроллером вычисления ШИМ усилителя ГН (КШИМ УГН) 32, представляющим собой процессорный модуль обработки сигналов, который в свою очередь электрически связан с широтно-импульсным модулятором ГН (ШИМ ГН) 33, представляющим собой драйвера для управления силовыми ключами, преобразователем напряжения (ПН) 34 и блоком силовых ключей (БСК) 35. (БСК) 35 электрически связан с форсирующей и удерживающей обмотками электромагнита механизма поворота боевого модуля (ММПБМ) 36, якорь электромагнита механизма поворота боевого модуля (ММПБМ) 36 механически связан с редуктором ГН (Ред. ГН) 37 и служит для переключения ручной и автоматической ветвей редуктора ГН (Ред. ГН) 37. (БСК) 35 усилителя мощности ГН (УМГН) 19 электрически связан с внешними устройствами (ВУ) 7, формирующих на его входе разрешающие или блокирующие сигналы, исключающие аварийные ситуации в работе привода ГН при управлении форсирующей и удерживающей обмотками электромагнита механизма поворота боевого модуля (ММПБМ) 36.
(ШИМ ГН) 33 электрически связан с усилителем ГН (У-ГН) 38, представляющим собой силовые ключи, собранные по мостовой схеме, усилителя мощности ГН (УМГН) 19, выход которого электрически связан с обмотками электродвигателя ГН (ЭД-ГН) 39, вал которого механически связан с редуктором ГН (Ред. ГН) 37.
Преобразователь напряжения (ПН) 34 служит для преобразования напряжения бортовой сети в высоковольтное напряжение, необходимое для работы электродвигателя ГН (ЭД-ГН) 39. Преобразователь напряжения (ПН) 34 управляется через (КШИМ УГН) 32 и электрически связан с бортовой сетью ОВН. Выход (ПН) 34 электрически связан с усилителем ГН (У-ГН) 38 усилителя мощности ГН (УМГН) 19.
Усилитель ГН (У-ГН) 38 усилителя мощности ГН (УМГН) 19 электрически соединен с датчиком тока усилителя ГН (ДТ ГН) 40 и датчиком скорости вала электродвигателя ГН (СК ГН) 41, которые в свою очередь электрически соединены с контроллером широтно-импульсного модулятора усилителя ГН (КШИМ УГН) 32 и служат для выработки сигналов пропорциональных соответственно току электродвигателя ГН (ЭД-ГН) 39 и скорости вала электродвигателя ГН (ЭД-ГН) 39. Обработанные в (КШИМ УГН) 32 сигналы, пропорциональные току электродвигателя ГН (ЭД-ГН) 39 и скорости вала электродвигателя ГН (ЭД-ГН) 39, через (ФСПШ УГН) 18 усилителя мощности ГН (УМГН) 19 выдаются на вторую последовательную шину (ПШ2) 17 и через нее и (ФСПШ2) 15 блока управления (БУ) 13 поступают в контроллер вычисления сигналов управления (КВСУ) 14.
Аналогично в контроллер вычисления сигналов управления (КВСУ) 14 через (ФСПШ3) 16 и (ПШ3) 20 поступают сигналы с датчика абсолютной угловой скорости корпуса (ДУС-К) 29, с датчика абсолютной угловой скорости по ГН (ДУС-ГН) 24 блока датчиков (БД) 22, и с измерителя угловых ускорений в плоскости ГН (ИУУ ГН) 27 датчика угловых ускорений (ДУУ) 26.
Контроллер вычисления сигналов управления (КВСУ) 14, в соответствии с заложенным алгоритмом, производит обработку поступивших в него сигналов от внешних устройств (ВУ) 7, устройств (ПУ1) 1, (ПУ2) 2, (ВСУ1) 5, (ВСУ2) 6, (ИУСВ) 10, (ДПБМ) 11, (ДУС-К) 29, (ДУС-ГН) 24 блока датчиков (БД) 22, (ИУУГН) 27 датчика угловых ускорений (ДУУ) 26, а также сигналов, пропорциональных току и скорости вала электродвигателя ГН (ЭД-ГН) 39.
В соответствии с выбранным оператором режимом работы в (КВСУ) 14 производится формирование сигнала управления приводом ГН, который через (ФСПШ 2) 15 блока управления (БУ) 13, вторую последовательную шину (ПШ2) 17 поступает в усилитель мощности ГН (УМГН) 19, где происходит формирование высоковольтного управления для электродвигателя ГН (ЭД-ГН) 39, который через редуктор ГН (Ред. ГН) 37 поворачивает боевой модуль (БМ) 8, а вместе с ней установленное вооружение (В) 23 в направлении заданном сигналом управления по ГН, формируемым информационно-управляющей системой вооружения (ИУСВ) 10.
Блоки, используемые в приводе ГН, такие как - первое задающее устройство стабилизации (ЗУС1) 3, второе панорамное задающее устройство стабилизации (ЗУС2) 4, первый (ПУ1) 1 и второй (ПУ2) 2 пульты управления, внешние устройства (ВУ) 7, (ВСУ1) 5, (ВСУ2) 6, (ИУСВ) 10, (ПШ1) 9, (ПШ2) 17, (ПШ3) 20, а также (ФСПШ1) 12, (ФСПШ2) 15, (ФСПШ3) 16, (КВСУ) 14 блока управления (БУ) 13 работают совместно и с приводом ВН.
Привод ВН содержит первый (ПУ1) 1 и второй (ПУ2) 2 пульты управления с чувствительными элементами наведения в плоскости ВН. Первое (ЗУС1) 3 и второе панорамное (ЗУС2) 4 задающие устройства стабилизации с датчиками положения (угла) независимо стабилизированного положения зеркала прицела по ВН, электрически связанные соответственно с первым (ПУ1) 1 и вторым (ПУ2) 2 пультами управления по ВН, а также соответственно с первым видеосмотровым устройством (ВСУ1) 5 и вторым видеосмотровым устройством (ВСУ2) 6, и с внешними устройствами (ВУ) 7.
Сигналы с выходов пультов управления по ВН (ПУ1) 1 и (ПУ2) 2, сигналы с первого (ЗУС1) 3 и второго панорамное (ЗУС2) 4 задающих устройств стабилизации с датчиками положения (угла) независимо стабилизированного положения зеркала прицела по ВН, а также сигналы с видеосмотровых устройств (ВСУ1) 5 и (ВСУ2) 6 связаны с первой последовательной шиной (ПШ1) 9. Информационно-управляющая система вооружения (ИУСВ) 10 электрически связана с первой последовательной шиной (ПШ1) 9 и через (ПШ1) 9 с датчиком положения вооружения (ДИВ) 42, который кинематически связан с осью вращения установленного вооружения (В) 23, и представляет собой датчик типа «вращающийся трансформатор», устанавливаемый на ось вращения вооружения через крестовую муфту, и встроенный контроллер преобразования аналогового сигнала в сигнал по протоколу CAN.
Устройства (ПУ1) 1, (ПУ2) 2, (ВСУ1) 5, (ВСУ2) 6, (ИУСВ) 10, (ДПВ) 42 электрически связаны с первой последовательной шиной (ПШ1) 9 и через (ПШ1) 9 с первым формирователем сигналов последовательной шины (ФСПШ 1) 12 блока управления (БУ) 13, который в свою очередь связан с контроллером вычисления сигналов управления (КВСУ) 14.
В свою очередь (КВСУ) 14 связан со вторым формирователем сигналов последовательной шины (ФСПШ2) 15, третьим формирователем сигналов последовательной шины (ФСПШ3) 16, а также с внешними устройствами (ВУ) 7 и усилителем широтно-импульсного модулятора механизма управления (У-ШИМ МУ) 43.
Второй формирователь сигналов последовательной шины (ФСПШ2) 15 блока управления (БУ) 13 электрически связан с второй последовательной шиной (ПШ2) 17 и через нее с формирователем сигналов последовательной шины усилителя ВН (ФСПШ УВН) 44 усилителя мощности ВН (УМВН) 45, представляющим собой контроллер для обработки сигналов по протоколам типа CAN и RS422.
Третий формирователь сигналов последовательной шины (ФСПШ3) 16 блока управления (БУ) 13 электрически связан с третьей последовательной шиной (ПШ3) 20 и через нее обменивается информацией с:
- формирователем сигналов последовательной шины блока датчиков (ФСПШ БД) 21 блока датчиков (БД) 22, жестко связанного с установленным вооружением (В) 23. (ФСПШ БД) 21 блока датчиков (БД) 22 электрически связан с датчиком абсолютной угловой скорости по ВН (ДУС-ВН) 46;
- формирователем сигналов последовательной шины датчика угловых ускорений (ФСПШ ДУУ) 25 датчика угловых ускорений (ДУУ) 26, жестко связанного с боевым модулем (БМ) 8. (ФСПШ ДУУ) 25 датчика угловых ускорений (ДУУ) 26 электрически связан с измерителем угловых ускорений в плоскости ВН (ИУУВН) 47.
(ФСПШ УВН) 44 усилителя мощности ВН (УМВН) 45 электрически связан с контроллером вычисления ШИМ усилителя ВН (КШИМ УВН) 48, который, в свою очередь, электрически связан с широтно-импульсным модулятором ВН (ШИМ ВН) 49, представляющим собой драйвера для управления силовыми ключами. (ШИМ ВН) 49 электрически связан с усилителем ВН (У-ВН) 50, представляющим собой силовые ключи, собранные по мостовой схеме, усилителя мощности ВН (УМВН) 45, выход которого электрически связан с обмотками электродвигателя ВН (ЭД-ВН) 51, вал которого механически связан с гидронасосом (Н) 52 гидропривода ВН (ГП) 53. Гидронасос (Н) 52 гидравлически связан с цилиндром исполнительным (НИ) 54, который в свою очередь электрически связан с усилителем широтно-импульсного модулятора механизма управления (У-ШИМ МУ) 43 блока управления (БУ) 13 и механически связан одним концом (штоком) с установленным вооружением (В) 23, а другим концом с боевым модулем (БМ) 8.
Усилитель ВН (У-ВН) 50 усилителя мощности ВН (УМВН) 45 соединен с датчиком тока усилителя ВН (ДТ ВН) 55, который в свою очередь электрически соединен с контроллером широтно-импульсного модулятора усилителя ВН (КШИМ УВН) 48 и служит для выработки сигнала пропорционального току электродвигателя ВН (ЭД-ВН) 51.
Для вычисления скорости вала электродвигателя ВН (ЭД-ВН) 51 служит датчик скорости вала (ДСВ) 56, который в свою очередь электрически соединен с контроллером широтно-импульсного модулятора усилителя ВН (КШИМ УВН) 48.
Обработанные в (КШИМ УВН) 48 сигналы, пропорциональные току электродвигателя ВН (ЭД-ВН) 51 и скорости вала электродвигателя ВН (ЭД-ВН) 51, через (ФСПШ УВН) 44 усилителя мощности ВН (УМВН) 45 выдаются на вторую последовательную шину (ПШ2) 17 и через нее и (ФСПШ2) 15 блока управления (БУ) 13 поступают в контроллер вычисления сигналов управления (КВСУ) 14.
Аналогично в контроллер вычисления сигналов управления (KBСУ) 14 через (ФСПШ 3) 16 и (ПШ3) 20 поступают сигналы с датчика абсолютной угловой скорости по ВН (ДУС-ВН) 46 блока датчиков (БД) 22 и с измерителя угловых ускорений в плоскости ВН (ИУУВН) 47 датчика угловых ускорений (ДУУ) 26.
Контроллер вычисления сигналов управления (KBСУ) 14, в соответствии с заложенным алгоритмом, производит обработку поступивших в него сигналов от внешних устройств (ВУ) 7, устройств (ПУ1) 1, (ПУ2) 2, (ВСУ1) 5, (ВСУ2) 6, (ИУСВ) 10, (ДПВ) 42, (ДУС-ВН) 46 блока датчиков (БД) 22, (ИУУВН) 47 датчика угловых ускорений (ДУУ) 26, а также сигналов, пропорциональных току и скорости вала электродвигателя ВН (ЭД-ВН) 51.
В соответствии с выбранным оператором режимом работы в (KB СУ) 14 производится формирование сигнала управления приводом ВН, который через (ФСПШ2) 15 блока управления (БУ) 13, вторую последовательную шину (ПШ2) 17 поступает в усилитель мощности ВН (УМВН) 45, где происходит формирование управления для электродвигателя ВН (ЭД-ВН) 51, который управляет производительностью гидронасоса (Н) 52.
Одновременно в (КВСУ) 14 производится формирование сигнала управления приводом ВН, который через усилитель широтно-импульсного модулятора механизма управления (У-ШИМ МУ) 43 блока управления (БУ) 13 поступает на механизм управления цилиндра исполнительного (ЦЛ) 54, шток которого поворачивает установленное вооружение (В) 23 в направлении, заданном сигналом управления по ВН, формируемым информационно-управляющей системой вооружения (ИУСВ) 10.
Блоки, используемые в приводе ВН, такие как - первое задающее устройство стабилизации (ЗУС1) 3, второе панорамное задающее устройство стабилизации (ЗУС2) 4, первый (ПУ1) 1 и второй (ПУ2) 2 пульты управления, внешние устройства (ВУ) 7, (ВСУ1) 5, (ВСУ2) 6, (ИУСВ) 10, (ПШ1) 9, (ПШ2) 17, (ПШ3) 20, а также (ФСПШ1) 12, (ФСПШ2) 15, (ФСПШ3) 16, (КВСУ) 14 блока управления (БУ) 13 работают совместно и с приводом ГН.
Большинство новых элементов системы реализованы как часть программного обеспечения блока управления, усилителей и датчиков, при этом обработка получаемых и передаваемых данных осуществляется несколькими контроллерами вычисления сигналов управления, положения, скорости и ускорения, состоящими в основном из:
- формирователей сигналов последовательных шин типа CAN, RS422, «Манчестер», SPI, I2S;
- формирователя сигнала широтно-импульсного модулятора;
- дискретного ввода - вывода.
Процедура вычисления контроллером блока управления сигналов управления выполнена в виде подпрограмм управления со звеньями коррекции по ГН и ВН, представляющим собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных контроллером блока управления данных и выдача им сигналов управления через последовательные шины на усилители приводов ГН и ВН и механизм управления цилиндра исполнительного гидропривода ВН будет определяться заданной частотой циклов обработки сигналов блоком управления и частотой обмена по последовательным шинам с информационно-управляющей системой вооружения, датчиками и усилителями приводов ВН и ГН.
Выходной усилитель ШИМ механизма управления (У-ШИМ МУ) блока управления может быть выполнен по схеме, построенной на транзисторных каскадах, управляемых в режиме широтно-импульсной модуляции (ШИМ) сигналами ШИМ, формируемыми контроллером вычисления сигналов управления (КВСУ).
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер. с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. переработанное и дополненное. - М.: Мир, 1993).
Датчики положения (угла) независимо стабилизированного инерциального объекта по ГН и ВН первого и второго задающих устройств стабилизации, датчики абсолютной угловой скорости ГН и ВН, датчик угловой скорости корпуса ОВН, датчик угловых ускорений, датчики положения боевого модуля и установленного вооружения соответственно по ГН и ВН, усилители мощности ГН и ВН вырабатывают соответственно на формирователях сигналов последовательных шин блока управления цифровые сигналы ошибок по ГН и ВН, сигналы по абсолютной угловой скорости установленного вооружения по ВН и ГН, сигнал скорости корпуса в плоскости ГН, сигналы по угловому ускорению боевого модуля в плоскости ГН и ВН, сигналы по относительному положению боевого модуля и установленного вооружения, сигналы обратных связей по скорости вращения вала и току исполнительного электродвигателя привода ГН, и приводного электродвигателя гидронасоса гидропривода ВН.
Принцип действия приводов ГН и ВН одинаков и основан на том, что каждый из этих приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Направление в горизонтальной и вертикальной плоскости, которое требуется придать установленному вооружению, является заданным значением регулируемого параметра для приводов ГН и ВН.
При движении ОВН на установленное вооружение действуют внешние возмущения в виде колебаний корпуса ОВН с боевым модулем и установленным на нем вооружением, моментов трения в погоне (опоре вращающегося БМ на корпус), редукторе привода ГН, электродвигателе ГН, трения в цапфах (опорах) люльки установленного вооружения, а также возмущения, обусловленные неуравновешенностью вращающегося боевого модуля относительно центра его вращения и неуравновешенностью установленного вооружения по ВН.
Эти возмущения вызывают отклонение установленного вооружения от заданного (ЗУС) направления. Угол между заданным и действительным направлением в этом случае определяет ошибку стабилизации приводов ГН и ВН.
Величина сигнала, пропорциональная ошибке стабилизации, отрабатывается приводами системы управления и стабилизации вооружения, поворачивающими установленное вооружение в сторону уменьшения ошибки.
Стабилизация и стабилизированное наведение установленного вооружения обеспечивается в трех независимых друг от друга режимах.
- ОСНОВНОЙ, дистанционное управление с места наводчика ОВН и стабилизация установленного вооружения (В) 23 по ГН и ВН по сигналам с первого задающего устройства стабилизации (ЗУС1) 3;
- ДУБЛЬ, дистанционное управление с места командира ОВН и стабилизация установленного вооружения (В) 23 по ГН и ВН по сигналам со второго панорамного задающего устройства стабилизации (ЗУС2) 4;
- ЦЕЛЕУКАЗАНИЕ, согласование установленного вооружения (В) 23 с независимо стабилизированной линией визирования второго панорамного задающего устройства стабилизации (ЗУС2) 4, при нахождении системы управления и стабилизации в режиме ОСНОВНОЙ и последующем включении режима ЦЕЛЕУКАЗАНИЯ командиром ОВН.
Стабилизация в режиме ОСНОВНОЙ установленного вооружения (В) 23 осуществляется по сигналам первого задающего устройства стабилизации (ЗУС1) 3, формирующего по цифровому каналу обмена в контроллере вычисления сигналов управления (КВСУ) 14 блока управления (БУ) 13 сигналы ошибок приводов по ГН и ВН, коммутируемые в соответствии с выбранным режимом работы ОВН по сигналам из информационно-управляющей системы вооружения (ИУСВ) 10 и сигналам от внешних устройств (ВУ) 7.
Далее полученные сигналы ошибок по ГН и ВН фильтруются и суммируются с соответствующими сигналами отрицательных обратных связей по абсолютной угловой скорости установленного вооружения (В) 23 по ГН и ВН, формируемых по сигналам с датчиков абсолютной угловой скорости (ДУС-ГН) 24, (ДУС-ВН) 46 блока датчиков (БД) 22, установленным на вооружении (В) 23.
Причем контур ошибки привода ГН дополнительно охвачен сигналами отрицательных обратными связей по току и скорости вращения вала исполнительного электродвигателя ГН (ЭД-ГН) 39, формируемых датчиком тока усилителя ГН (ДТ ГН) 40 и датчиком скорости вала электродвигателя ГН (СК ГН) 41 усилителя мощности (УМГН) 19. Также в качестве сигналов обратной связи используются сигналы с измерителя угловых ускорений по ГН (ИУУТН) 27 датчика угловых ускорений (ДУУ) 26 и с датчика абсолютной угловой скорости корпуса (ДУС-К) 29 ОВН.
Контур ошибки привода ВН дополнительно охвачен сигналами отрицательных обратными связей по току и скорости вращения вала приводного электродвигателя (ЭД-ВН) 51 гидронасоса (Н) 52, формируемых датчиком тока усилителя ВН (ДТ ВН) 55 и датчиком скорости вала электродвигателя ВН (ДСВ) 56 усилителя мощности (УМВН) 45 гидропривода ВН (ГП) 53. Также в качестве сигналов обратной связи используется сигнал с измерителя угловых ускорений по ВН (ИУУВН) 47 датчика угловых ускорений (ДУУ) 26.
Указанные сигналы обратных связей позволяют повысить добротность и устойчивость приводов ГН и ВН, тем самым обеспечив требуемое качество управления приводами ГН и ВН, что в сумме с новыми цифровыми алгоритмами управления позволяет уменьшить ошибку стабилизации установленного вооружения (В) 23 по ВН и ГН.
Одновременно с указанными сигналами обратных связей в (КВСУ) 14 блока управления (БУ) 13 подаются сигналы относительной скорости установленного вооружения (В) 23 и боевого модуля (БМ) 8 соответственно по ВН и ГН, полученные корректирующими звеньями методом дифференцирования соответствующих сигналов с датчиков положения вооружения по ВН (ДПВ) 42 и боевого модуля по ГН (ДПБМ) 11.
Полученные сигналы относительной скорости установленного вооружение (В) 23 и боевого модуля (БМ) 8 по ВН и ГН, представляют собой сигналы обратных связей по возмущению, воздействующему соответственно на установленное вооружение (В) 23 и боевой модуль (БМ) 8 в плоскостях ВН и ГН при движении ОВН. Введение указанных обратных связей по возмущению в контуры управления приводами ВН и ГН позволяет дополнительно повысить точность стабилизации установленного вооружения (В) 23.
Таким образом, полученные и обработанные в (КВСУ) 14 сигналы управления по ГН и ВН поступают на соответствующие усилители ГН (УМГН) 19, ВН (УМВН) 45 и (У-ШИМ МУ) 43 блока управления (БУ) 13, формирующие соответственно сигналы управления для электродвигателя ГН (ЭД-ГН) 39, приводного электродвигателя ВН (ЭД-ВН) 51 гидронасоса (Н) 52, и механизма управления цилиндра исполнительного (НИ) 54 гидропривода ВН (ГП) 53.
Полученные сигналы управления по ГН и ВН преобразуются соответственно в силовые сигналы для управления обмотками электродвигателя ГН (ЭД-ГН) 39 и обмотками механизма управления цилиндра исполнительного (ЦИ) 54, обеспечивающих вращение вала электродвигателя ГН (ЭД-ГН) 39 и линейное перемещения штока цилиндра исполнительного (НИ) 54 соответственно.
Электродвигатель ГН (ЭД-ГН) 39, механически связанный с редуктором ГН (Ред. ГН) 37, шток гидроцилиндра (ЦИ) 54, механически связанный с боевым модулем (БМ) 8 и установленным вооруженим (В) 23, поворачивают соответственно боевой модуль (БМ) 8 по ГН и установленное вооружение (В) 23 по ВН в сторону уменьшения ошибки стабилизации, тем самым удерживая направление установленного вооружения (В) 23 на цель, заданное информационно-управляющей системой вооружения (ИУСВ) 10 по сигналам с первого задающего устройства стабилизации (ЗУС1) 3.
Блок силовых ключей (БСК) 35 по командам от контроллера вычисления (КШИМ УГН) 32 и от внешних устройств (ВУ) 7 управляет работой электромагнита механизма поворота боевого модуля (ММПБМ) 36, который через редуктор привода ГН (Ред. ГН) 37 обеспечивает блокировку (разблокировку) боевого модуля (БМ) 8 в случае аварийного (рабочего) или несанкционированного оператором(ами), и информационно управляющей системой вооружения (ИУСВ) 10 поведения привода ГН.
Наведение в режиме ОСНОВНОЙ установленного вооружения (В) 23 осуществляется по сигналам первого задающего устройства стабилизации (ЗУС1) 3, связанного электрически с первым пультом управления (ПУ1) 1 по ГН, ВН и формирующего по цифровому каналу обмена в (КВСУ) 14 блока управления (БУ) 13 сигналы ошибок приводов по ГН и ВН. Наводчик (оператор) ОВН пультом управления (ПУ1) 1 по ГН и ВН наводит стабилизированную в двух плоскостях линию визирования (прицельную марку) первого задающего устройства стабилизации (ЗУС1) 3 на цель по изображению на первом видеосмотровом устройстве (ВСУ1) 5. Сигналы с датчиков положения ГН и ВН первого задающего устройства стабилизации (ЗУС1) 3, пропорциональные ошибкам стабилизации по ГН и ВН, отрабатываются приводами ГН и ВН, поворачивающими установленное вооружение (В) 23 в сторону уменьшения ошибок ГН и ВН, аналогично рассмотренному выше режиму стабилизации в режиме ОСНОВНОЙ.
Для компенсации скоростной ошибки в плоскостях ГН и ВН сигнал с (ПУ1) 1 через (ПШ1) 9 и (ФСПШ1) 12 поступает в (КВСУ) 14 блока управления (БУ) 13.
Стабилизация в режиме ДУБЛЬ установленного вооружения (В) 23 осуществляется по сигналам второго панорамного задающего устройства стабилизации (ЗУС2) 4, формирующего по цифровому каналу обмена в (КВСУ) 14 блока управления (БУ) 13 сигналы ошибок приводов по ГН и ВН, коммутируемые в соответствии с выбранным режимом работы ОВН по сигналам из информационно-управляющей системы вооружения (ИУСВ) 10 и сигналам от внешних устройств (ВУ) 7.
Далее, аналогично рассмотренному выше режиму стабилизации в режиме ОСНОВНОЙ, полученные сигналы ошибок по ГН и ВН преобразуются и суммируются в (КВСУ) 14 с сигналами обратных связей по ГН и ВН, позволяющими поднять точность стабилизации приводов по ГН и ВН системы стабилизации в режиме ДУБЛЬ.
Обработанные в (КВСУ) 14 сигналы управления по ГН и ВН поступают на соответствующие усилители ГН (УМГН) 19, ВН (УМВН) 45 и (У-ШИМ МУ) 43 блока управления (БУ) 13, формирующие соответственно сигналы управления для электродвигателя ГН (ЭД-ГН) 39, приводного электродвигателя ВН (ЭД-ВН) 51 гидронасоса (Н) 52, и механизма управления цилиндра исполнительного (ЦИ) 54 гидропривода ВН (ГП) 53.
Полученные сигналы управления по ГН и ВН преобразуются соответственно в силовые сигналы для управления обмотками электродвигателя ГН (ЭД-ГН) 39 и линейных перемещений штока для цилиндра исполнительного (НИ) 54.
Электродвигатель ГН (ЭД-ГН) 39, механически связанный с редуктором ГН (Ред. ГН) 37, шток гидроцилиндра (ЦИ) 54, механически связанный с боевым модулем (БМ) 8 и установленным вооруженим (В) 23, поворачивают соответственно боевой модуль (БМ) 8 по ГН и установленное вооружение (В) 23 по ВН в сторону уменьшения ошибки стабилизации, тем самым удерживая направление установленного вооружения (В) 23 на цель, заданное информационно-управляющей системой вооружения (ИУСВ) 10 по сигналам со второго панорамного задающего устройства стабилизации (ЗУС2) 4.
Блок силовых ключей (БСК) 35 и электромагнит механизма поворота боевого модуля (ММПБМ) 36 в режиме ДУБЛЬ работают аналогично описанному выше режиму ОСНОВНОЙ.
Наведение в режиме ДУБЛЬ установленного вооружения (В) 23 осуществляется по сигналам второго панорамного задающего устройства стабилизации (ЗУС2) 4, связанного электрически со вторым пультом управления (ПУ2) 2 по ГН, ВН и формирующего по цифровому каналу обмена в (КВСУ) 14 блока управления (БУ) 13 ошибки приводов по ГН и ВН. Командир (оператор) ОВН пультом управления (ПУ2) 2 по ГН и ВН наводит стабилизированную в двух плоскостях линию визирования (прицельную марку) второго панорамного задающего устройства стабилизации (ЗУС2) 4 на цель по изображению на втором видеосмотровом устройстве (ВСУ2) 6. Сигналы с датчиков положения ГН и ВН второго панорамного задающего устройства стабилизации (ЗУС2) 4, пропорциональные ошибкам стабилизации по ГН и ВН, отрабатываются приводами ГН и ВН, поворачивающими установленное вооружение (В) 23 в сторону уменьшения ошибок ГН и ВН, аналогично рассмотренному выше режиму стабилизации в режиме ДУБЛЬ.
Для компенсации скоростной ошибки в плоскостях ГН и ВН сигнал с (ПУ2) 2 через (ПШ1) 9 и (ФСПШ1) 12 поступает в (КВСУ) 14 блока управления (БУ) 13.
Стабилизация в режиме ЦЕЛЕУКАЗАНИЕ установленного вооружения (В) 23 осуществляется по сигналам второго панорамного задающего устройства стабилизации (ЗУС2) 4 аналогично режиму ДУБЛЬ. При этом установленное вооружение (В) 23 и боевой модуль (БМ) 8 по ВН и ГН совместно с линией визирования (маркой прицела) первого задающего устройства стабилизации (ЗУС1) 3 согласовывается с заданной точностью с независимо стабилизированной линией визирования (маркой прицела) второго панорамного задающего устройства стабилизации (ЗУС2) 4, наведенной командиром ОВН на выбранную цель. После согласования режим ЦЕЛЕУКАЗАНИЯ автоматически снимается, система управления и стабилизации переходит в ранее выбранный режим работы - ОСНОВНОЙ и наводчик (оператор) ОВН производит работу по выбранной командиром ОВН цели.
Таким образом, заявляемая в качестве изобретения система управления и стабилизации вооружением позволяет:
- повысить надежность СУСВ за счет замены устаревшего электромашинного привода ГН на современный электропривод с векторным управлением исполнительным электродвигателем ГН, позволяющий исключить недостатки электромашинного привода ГН системы стабилизации - прототипа;
- повысить эксплутационные показатели СУСВ за счет введения цифровых контуров управления и коррекции приводами ГН и ВН, что позволяет применить адаптивные и оптимальные алгоритмы управления СУСВ, гибко менять ее параметры при изменении механических параметров ОВН в процессе его эксплуатации;
- повысить эксплутационную интероперабельность СУСВ за счет введения в ее структуру цифровых информационных каналов обмена с внешними устройствами объекта военного назначения (ОВН), что позволяет резко повысить эксплутационные характеристики СУСВ и возможность ее установки на другие ОВН без существенной доработки. Повышение эксплутационной интероперабельности также достигается введением во внутреннюю структуру СУСВ дополнительных цифровых информационных каналов, позволяющих проводить настройку и диагностику СУСВ, как при помощи внешних устройств диагностики и настройки, подключаемых к контрольному разъему блока управления СУСВ, так и при помощи встроенных средств диагностики и настройки ОВН, в частности через видеосмотровые устройства ОВН;
- повысить точность стабилизации по ВН и ГН за счет введения в контуры управления приводами ВН и ГН СУСВ дополнительных сигналов обратных связей с датчиковой аппаратуры ОВН, таких как ДУУ, ДУС-К, БПБМ, ДПВ, получаемых по цифровым информационным каналам обмена, что позволяет поднять устойчивость и добротность контуров управления приводами ВН и ГН. Это дает возможность в сумме с новым электроприводом ГН и новым гидроприводом ВН СУСВ повысить точность стабилизации не менее чем на (25-30)%, а также увеличить скорость переброса и отработки по ГН и ВН (до величины не менее 40-45%);
- расширить функциональные возможности СУСВ, такие как введение режима стабилизированного целеуказания, за счет введения в ее структуру дополнительных устройств (второй пульт управления, второе панорамное задающее устройство стабилизации), позволяющих обеспечить ее работу с несколькими прицельными комплексами, имеющими независимую двухплоскостную стабилизацию линии визирования;
- увеличить живучесть ОВН за счет введения в структуру СУСВ дополнительных устройств (второй пульт управления, второе панорамное задающее устройство стабилизации), позволяющих обеспечить ее работу в случае отказа основного прицельного комплекса ОВН (первого задающего устройства стабилизации).
Таким образом, поставленные в заявке технические задачи достигнуты.
Приведенные в описании технические преимущества, целесообразность и надежность системы управления и стабилизации вооружения, реализованной по заявляемой структурной схеме, подтверждены испытаниями опытного образца системы на испытательной базе ОАО «КЭМЗ» г. Ковров, ОАО «УКБТМ» и ОАО «НПК Уралвагонзавод» г. Нижний Тагил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2014 |
|
RU2550407C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
Изобретение относится к области вооружения и военной техники, а именно к системам автоматического управления и регулирования, в частности к системам наведения, стабилизации и управления вооружением ОВН (боевых машин типа БМП, БМД, танков, БТР, БРДМ и т.п.), работающих с комплексом управления вооружением этих объектов. Основной целью изобретения является повышение эксплутационных характеристик системы управления и стабилизации вооружения, расширение возможности ее применения и диагностики, а также обеспечение дистанционного наведения установленного на ОВН вооружения. Для достижения цели в известную систему управления и стабилизации вооружения ОВН дополнительно введены с соответствующими связями: второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, второй пульт управления, первая и вторая панели видеосмотрового устройства (ВСУ), информационно-управляющая система вооружения (ИУСВ), усилитель мощности ГН, включающий в себя: преобразователь напряжения, контроллер широтно-импульсного модулятора (ШИМ) усилителя ГН, широтно-импульсный модулятор ГН, усилитель ГН, датчик тока усилителя ГН, датчик скорости вала электродвигателя ГН, блок силовых ключей, формирователь сигналов последовательной шины усилителя ГН; электромагнит механизма поворота боевого модуля, корпус ОВН, датчик абсолютной угловой скорости корпуса (ДУС-К), включающий в себя: датчик абсолютной угловой скорости (ДУС), формирователь сигналов последовательной шины ДУС-К; датчик положения боевого модуля по ГН, датчик положения установленного вооружения по ВН, датчик угловых ускорений (ДУУ), включающий в себя: измеритель угловых ускорений в плоскости ГН, измеритель угловых ускорений в плоскости ВН, формирователь сигналов последовательной шины ДУУ; первая последовательная шина, вторая последовательная шина, третья последовательная шина, кроме того, в блок управления дополнительно введены: первый формирователь сигналов последовательной шины, второй формирователь сигналов последовательной шины, третий формирователь сигналов последовательной шины, контроллер вычисления сигналов управления, усилитель механизма управления цилиндра исполнительного; в блок датчиков дополнительно введен: формирователь сигналов последовательной шины блока датчиков; в гидропривод дополнительно введены: усилитель мощности ВН, датчик скорости вала электродвигателя ВН, контроллер вычисления ШИМ усилителя ВН, широтно-импульсный модулятор ВН, усилитель ВН, датчик тока усилителя ВН, формирователь сигналов последовательной шины усилителя ВН. 2 ил.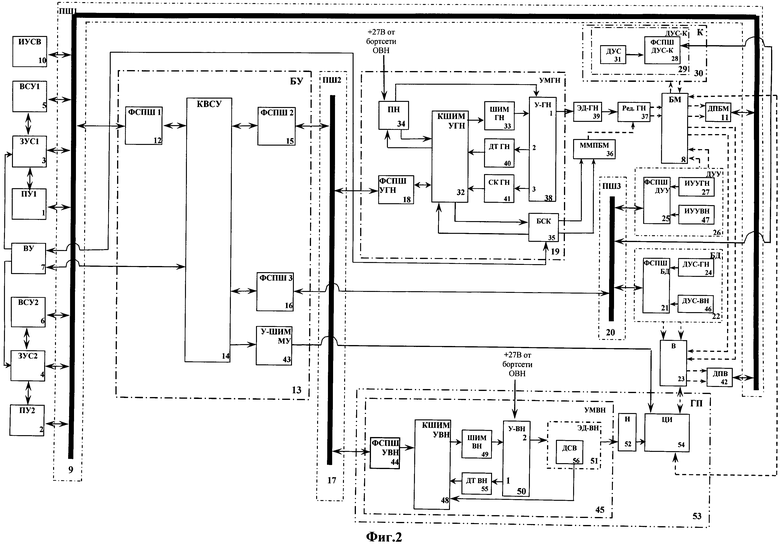
Система управления и стабилизации вооружения, содержащая установленное вооружение с закрепленными на нем блоком датчиков с датчиками абсолютной угловой скорости по ВН и ГН, боевой модуль (башню) с установленным на нем вооружением, электродвигатель гидропривода ВН, гидронасос гидропривода ВН, цилиндр исполнительный гидропривода ВН, механически связанный с установленным вооружением и боевым модулем и гидравлически с гидронасосом гидропривода ВН, редуктор ГН, механически связанный с боевым модулем и электродвигателем ГН, электродвигатель ГН, первый пульт управления, первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, электрически связанное с первым пультом управления, внешние устройства, электрически связанные с первым задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, блок управления, электрически связанный с внешними устройствами, отличающаяся тем, что в нее дополнительно введены второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, второй пульт управления, первая и вторая панели видеосмотрового устройства, информационно-управляющая система вооружения, усилитель мощности ГН, включающий в себя преобразователь напряжения, контроллер широтно-импульсного модулятора усилителя ГН, широтно-импульсный модулятор ГН, усилитель ГН, датчик тока усилителя ГН, датчик скорости вала электродвигателя ГН, блок силовых ключей, формирователь сигналов последовательной шины усилителя ГН; электромагнит механизма поворота боевого модуля, корпус объекта военного назначения, датчик абсолютной угловой скорости корпуса, включающий в себя датчик абсолютной угловой скорости, формирователь сигналов последовательной шины датчика абсолютной угловой скорости корпуса; датчик положения боевого модуля по ГН, датчик положения установленного вооружения по ВН, датчик угловых ускорений, включающий в себя измеритель угловых ускорений в плоскости ГН, измеритель угловых ускорений в плоскости ВН, формирователь сигналов последовательной шины датчика угловых ускорений; первая последовательная шина, вторая последовательная шина, третья последовательная шина, при этом блок управления выполнен цифровым и содержит первый формирователь сигналов последовательной шины, второй формирователь сигналов последовательной шины, третий формирователь сигналов последовательной шины, контроллер вычисления сигналов управления, усилитель широтно-импульсного модулятора механизма управления цилиндра исполнительного; причем блок датчиков дополнительно содержит формирователь сигналов последовательной шины установленных в нем датчиков абсолютной угловой скорости по ГН и ВН, а в гидропривод дополнительно введены усилитель мощности ВН, датчик скорости вала электродвигателя ВН, контроллер вычисления широтно-импульсного модулятора усилителя ВН, широтно-импульсный модулятор ВН, усилитель ВН, датчик тока усилителя ВН, формирователь сигналов последовательной шины усилителя ВН усилителя мощности ВН; при этом первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН электрически связано с первым видеосмотровым устройством, а второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН электрически связано со вторым пультом управления по ВН и ГН, вторым видеосмотровым устройством и внешними устройствами, причем первое и второе видеосмотровые устройства, первый и второй пульты управления по ВН и ГН, первое задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, второе панорамное задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН, а также информационно-управляющая система вооружения электрически связаны с первой последовательной шиной, которая, в свою очередь, электрически связана с первым формирователем сигналов последовательной шины блока управления, с датчиком положения боевого модуля, кинематически связанным с погоном боевого модуля, и с датчиком положения установленного вооружения, кинематически связанным с осью вращения установленного вооружения, при этом внешние устройства электрически связаны с контроллером вычисления сигналов управления блока управления, который, в свою очередь, связан с первым, вторым и третьим формирователями сигналов последовательной шины блока управления и усилителем широтно-импульсного модулятора механизма управления цилиндра исполнительного блока управления причем, второй формирователь сигналов последовательной шины блока управления через вторую последовательную шину электрически связан с формирователями сигналов последовательной шины усилителя ГН и усилителя ВН, соответственно усилителя мощности ГН и усилителя мощности ВН, а третий формирователь сигналов последовательной шины блока управления через третью последовательную шину электрически связан с формирователем сигналов последовательной шины датчика угловых ускорений, механически связанного через корпус датчика угловых ускорений с боевым модулем, с формирователем сигналов последовательной шины блока датчиков и с формирователем сигналов последовательной шины датчика угловой скорости корпуса, механически связанного через корпус датчика угловой скорости корпуса с корпусом объекта военного назначения, который в свою очередь через вращающийся погон механически связан с боевым модулем объекта военного назначения, при этом формирователь сигналов последовательной шины датчика угловых ускорений электрически связан с измерителями угловых ускорений по ГН и ВН, формирователь сигналов последовательной шины блока датчиков электрически связан с датчиками абсолютной угловой скорости по ГН и ВН, а формирователь сигналов последовательной шины датчика угловой скорости корпуса электрически связан с датчиком абсолютной угловой скорости, при этом с одной стороны формирователь сигналов последовательной шины усилителя ГН усилителя мощности ГН электрически связан с контроллером широтно-импульсного модулятора усилителя ГН, связанного с преобразователем напряжения, с широтно-импульсным модулятором ГН и блоком силовых ключей, при этом широтно-импульсный модулятор ГН, в свою очередь, связан с входом усилителя ГН усилителя мощности ГН, первый выход которого электрически связан с электродвигателем ГН, а второй и третий выходы соответственно электрически связаны с датчиком тока усилителя ГН и датчиком скорости вала электродвигателя ГН, выходы которых соответственно электрически соединены с входами контроллера широтно-импульсного модулятора усилителя ГН, а один из входов преобразователя напряжения, в свою очередь, соединен с бортовой сетью ОВН, а его высоковольтный выход соединен с усилителем ГН усилителя мощности ГН, вращающим вал электродвигателя ГН, который через редуктор ГН, механически связанный с электромагнитом механизма поворота боевого модуля, поворачивает боевой модуль с установленным вооружением в соответствии с заданным первым или вторым задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и выработанное контроллером вычисления сигналов управления сигналом управления по ГН угловое положение при разрешающем сигнале с блока силовых ключей, электрически связанного с электромагнитом механизма поворота боевого модуля и внешними устройствами, с другой стороны формирователь сигналов последовательной шины усилителя ВН усилителя мощности ВН гидропривода ВН электрически связан с контроллером широтно-импульсного модулятора усилителя ВН, связанного, в свою очередь, с широтно-импульсным модулятором ВН, выход которого связан с усилителем ВН усилителя мощности ВН, первый выход которого электрически соединен с датчиком тока усилителя ВН, выход которого электрически связан с входом контроллера широтно-импульсного модулятора усилителя ВН, а второй выход усилителя ВН электрически связан с электродвигателем ВН, вал которого электрически связан с датчиком скорости вращения вала электродвигателя ВН и механически с гидронасосом гидропривода ВН, причем усилитель ВН усилителя мощности ВН соединен с бортовой сетью объекта военного назначения, а гидронасос гидропривода ВН гидравлически связан с цилиндром исполнительным гидропривода ВН, который, в свою очередь, электрически связан с усилителем широтно-импульсного модулятора механизма управления цилиндра исполнительного блока управления и кинематически связан одним концом с корпусом боевого модуля, а другим концом с установленным вооружением, поворачивая его относительно боевого модуля в плоскости ВН, в соответствии с заданным первым или вторым задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ВН и выработанное контроллером вычисления сигналов управления сигналом управления по ВН угловое положение.
| КОРНЕЕВ В.В., КУЗНЕЦОВ М.И., КУЗЬМИН Л.П., ПАВЛИЧУК К.И | |||
| Основы автоматики и танковые автоматические системы | |||
| -М.: МО СССР Академии бронетанковых войск им | |||
| маршала Р.Я.МАЛИНОВСКОГО | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2308659C2 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| Устройство для разработки и удаления грунта из кессона | 1938 |
|
SU60862A1 |

