
Предлагаемая группа изобретений относится к области медицины к малоинвазивному методу операционного вмешательства, а именно к пункционной биопсии органов грудной клетки, брюшной полости, малого таза и конечностей и к соответствующему медицинскому оборудованию, осуществляющему пункционную биопсию.
Уровень техники
Несколько десятков лет назад злокачественный характер инкапсулированных опухолей устанавливали с помощью сложного и рискованного способа (см. Волков П.Т., "Клиника, диагностика и хирургическое лечение новообразований средостения", Л., 1970 г. [1]). Известный из источника [1] способ подразумевает оперативное рассечение грудной клетки и забор кусочка ткани. Как правило, выполняли трансплевральный и межреберный разрез. Кроме того, из других оперативных способов (также см. [1]) использовали срединную стериотомию, верхнюю медиастинотомию через шейный разрез, передне-боковую, заднебоковую или боковую торакотомию. Естественно выбор оперативного доступа для взятия биопсийного кусочка проводился после рентгенологического определения новообразования.
По прошествии времени, для определения характера опухолей использовалась пункционная биопсия.
Как известно пункционная биопсия - это малоинвазивная процедура, которая лишена недостатков хирургической биопсии [1], в том числе необходимости проведения обширных разрезов кожи и применения общего наркоза. Пункционная биопсия представляет собой надежный метод получения образцов ткани, что позволяет подтвердить доброкачественный или злокачественный характер образования. Данная процедура не сопровождается сильной болью, а точность ее результатов сравнима с хирургической биопсией [1], восстановление после пункционной биопсии происходит довольно быстро и пациенты могут вскоре вернуться к привычной жизни.
Из уровня техники известен способ получения биопсийного материала средостения (см. RU 94009373, кл. A61B 17/34, публ. 1996 г. [2]).
Известный способ получения биопсийного материала включает рентгенологическое определение локализации новообразования и биопсию, а биопсийную ткань берут через грудину, при этом забор биопсийной ткани осуществляют с помощью иглы для биопсии паренхиматозных органов.
Является очевидным, что известный способ [2] лишен недостатков хирургической биопсии [1], вследствие проведения которой, в частности, в результате обширных разрезов кожи под наркозом, могут возникать кровотечения из-за повреждения сосудов, повреждения соседних с опухолью органов, нагноения и другие повреждения.
Однако в известном решении [2] чрезгрудинную биопсию проводят без предварительного обезболивания, иглой для пункции паренхиматозных органов, при этом на игле заранее отмечается глубина введения. Очевидно, что такой прием чрезвычайно опасен для здоровья пациентов, поскольку прокол грудины осуществляют без какой-либо поверхностной и внутрикожной анестезии. Таким образом, фактически врачом осуществляется прокол грудины интуитивно, только лишь ориентировочно в предполагаемое место нахождения опухоли, таким образом, фактически существует вероятность ошибки и повреждение соседних с опухолью органов. Помимо этого, без предварительной анестезии, реакция пациента на проникновение иглы в грудь может быть непредсказуемой, возможен и болевой шок - как следствие потеря сознания, смещение тела во время проникновения иглы - соответственно "качание" иглы и в результате повреждение внутренних органов пациента, а также возможны другие тяжкие для здоровья пациента последствия.
Наиболее близким аналогом предлагаемого способа проведения малоинвазивного хирургического вмешательства является способ выполнения чрескожной пункционной биопсии (см. RU 2362490, кл. A61B 10/02, публ. 2009 г. [3]).
Известный способ выполнения чрескожной биопсии [3] включает предварительную оценку локализации, размеров, структуры очагового образования, выбор оптимальной точки пункции с помощью компьютерной томографии и пункционную биопсию очагового образования с помощью биопсийной иглы длиной не более 20 см.
Сущность известного способа выполнения чрескожной биопсии [3] заключается в том, что осуществляют стандартную премедикацию, и проводят исследование КТ, при котором оценивают локализацию, размеры, структуру, зоны интереса и др. Далее в ручную делают прокол кожи скальпелем в выбранной точке, а затем через прокол кожи вводят 2-3 иглы, которые вводят на глубину 2-4 см (до мышц) и делают КТ. На экране дисплея томографа определяют иглу, имеющую оптимальное направление и измеряют расстояние от конца иглы до границы очагового образования. Выбранную иглу продвигают к границе очагового образования, а остальные удаляют. После проведения иглы к границе очагового образования (зоны интереса) пациента выводят из апертуры томографа, а мандрен из иглы удаляют. Через просвет иглы вводят биопсийную иглу с заранее присоединенным и взведенным биопсийным пистолетом на глубину, равную длине мандрена, и фиксируя пистолет выполняют биопсию очагового образования.
Данная методика пункционной биопсии [3] благодаря использованию предоперационной подготовки и премедикации, включающей анестезию, проходит достаточно комфортно и безболезненно для пациента. Полученный в ходе выполнения данной методики [3] биопат, обладающий возможностью его визуальной оценки, направляют для проведения гистологического исследования.
Однако известная технология пункционной биопсии [3] не лишена недостатков. Безусловно проведение КТ очагового образования позволяет выбрать оптимальную точку для пункции и выбрать правильную траекторию движения иглы, но фактически вся основная процедура проходит в ручную с использованием 20-и сантиметровых игл, применяемых одновременно, неловкое использование которых может нанести серьезное повреждение пациенту, кроме того, пациента периодически кратковременно выводят из апертуры томографа, что может пробуждать у него излишнее беспокойство и сомнения в успешности операции, а внешний вид игл длиной в 20 см может существенно усугубить ситуацию. Таким образом, успех всей операции, по известной технологии [3], в основном зависит от хирурга, осуществляющего ее, от опыта, таланта и квалификации которого будет зависеть здоровье и жизнь пациента.
Рассмотренные выше варианты хирургических вмешательств проводят исключительно вручную под полным контролем специалистов-хирургов, однако, талантливых и опытных специалистов из них, способных дать высокие гарантии надежности и успешности проведения операций, во всем мире ограниченное количество, что в свою очередь стимулирует специалистов в данной области техники на создание автоматизированных, работающих при минимальном участии человека систем, проводящих надежные и успешные различные хирургические вмешательства и операции.
Роботизированная хирургия начала развиваться в 1980-х годах. Одним из первых автоматических аппаратов в хирургии был робот "da Vinci". Первый вариант был разработан именно в конце 1980-х годов, а на 2010 год построено более 1000 роботов "da Vinci", которые успешно используются в сотнях медицинских учреждениях по всему миру.
Робот-ассистированная хирургическая система "da Vinci" производится серийно компанией Intuitive Surgical. Робот состоит из двух блоков, один для оператора, второй выполняет роль хирурга. Врач садится за пульт, который дает возможность видеть оперируемый участок в 3D с многократным увеличением и использует специальные джойстики, чтобы управлять инструментами. Робот "da Vinci" делает операции такие как - восстановление митрального клапана, абляция тканей сердца, желудочное шунтирование, лобэктомия легкого, резекция опухоли средостения, реимплантация мочеточника, тиреоидэктомия и мн. др. (см. https://ru.wikipedia.org/wiki/Da_Vinci_(робот-хирург) [4]).
Однако для выполнения малоинвазивных хирургических вмешательств, таких как, пункционная биопсия робот "da Vinci" не предназначен.
Из уровня техники известно автоматизированное устройство для биопсии паренхиматозных органов с одновременным спектроскопическим контролем (см. RU 2529629, кл. A61B 10/02, публ. 2014 г. [5]).
Известное автоматизированное устройство для биопсии с одновременным спектроскопическим контролем [5] содержит источник излучения, соединенное с ним волокно для доставки излучения, блок регистрации, ЭВМ с программным обеспечением, приспособление для биопсии, захватывающее и удерживающее биопат.
Суть процедуры биопсии паренхиматозных органов с устройством для биопсии с одновременным спектроскопическим контролем (см. источник [5]) заключается в том, что лазерное излучение, выходящее из источника входит в световод, по которому попадает в трубку для биопсии. Выходя из волокна внутри трубки излучение взаимодействует с биологической тканью. Рассеянное лазерное излучение, вместе с флуоресцентным излучением попадает в приемные волокна, затем излучение попадает в спектрометр, после чего входящее излучение формируется в спектр и проецируется на фотодиодную линейку. Блок регистрации передает оцифрованную информацию в компьютер, в котором происходит обработка поступившей в него информации. Для захвата биопата с помощью шприца подсасывается воздух внутри биопсийной трубки, в результате чего биопат попадает внутрь биопсийной трубки. Для извлечения биопата из биопсийной трубки в пробирку необходимо пропустить через нее воздух либо жидкость с помощью шприца.
Известное устройство для биопсии (см. источник [5]) автоматизировано лишь частично, и врачу приходится принимать участие практически на всех этапах работы устройства, в частности, врачу необходимо самостоятельно захватывать и вымывать исследуемый биопат с помощью шприца, таким образом, надежность проведения и успех процедуры биопсии полностью зависит от профессионализма и таланта врача. Помимо сказанного, вся процедура биопсии, осуществляющаяся с помощью известного устройства для биопсии [5], требует траты достаточно длительного времени на многочисленные подготовительные этапы, заключающиеся в пероральном введении в организм пациента раствора гидрохлорида 5-аминолевулиновой кислоты (за несколько часов до начала основной процедуры биопсии) и в подготовки самого устройства, которая состоит из следующих стадий: включение лазера, калибровка спектрометра, подготовка компьютера, настройка установки УЗИ под контролем которой желательно проведение процедуры биопсии, анализ спектроскопических данных, а также расчет концентрации опухолевых маркеров. Таким образом, указанные выше недостатки известного устройства для биопсии [5] очевидны и могут отрицательным образом сказываться на результатах процедуры биопсии, проводимой с помощью известного устройства для биопсии [5].
Из уровня техники известна система для выполнения биопсии (см. RU 2510699, кл. A61B 10/02, публ. 2012 г. [6]).
Известная система для биопсии [6] содержит систему визуализации для получения диагностических изображений целевой области, устройство, содержащее выдвигающуюся иглу для выполнения процедуры биопсии, систему слежения за иглой для биопсии, систему визуализации для получения изображений целевой области и компьютерную систему, связанную с системами слежения и визуализации.
Известная система для биопсии [6] так же как и устройство для биопсии [5] не является полностью автоматизированной и нуждается в периодичном вмешательстве опытного врача, периодически осуществляющего настройку и корректировку работы системы, в частности, допускается возможность предоставления врачу именно вручную совмещать зонд и систему визуализации. Следовательно, специалисту в данной области техники очевидно, что все-таки успех проведения операции, которая проводится с помощью системы для выполнения биопсии [6] в большей степени зависит от человеческого фактора, а именно от профессионализма, таланта и опыта хирурга, контролирующего ход операции и вносящего в него необходимые и важнейшие корректировки.
Наиболее близким аналогом предлагаемой установки для проведения малоинвазивного хирургического вмешательства является роботизированная система для проведения малоинвазивных хирургических вмешательств (см. US 6785572, кл. A61B 10/02, публ. 2004 г. [7]).
Известная роботизированная система [7] содержит устройство для визуализации для получения диагностических изображений целевой области, которое в ходе операции с определенной периодичностью в режиме реального времени формирует изображения целевой области, отображающихся на мониторе компьютерной системы, робот-манипулятор подвижный элемент, которого на концевом участке содержит приспособление для удержания биопсийной иглы, движение, которой контролируется компьютерной системой и отображается на ее мониторе.
Известная роботизированная система полностью автоматизированная, и не требует в эксплуатации каких-либо вмешательств или корректировок хирурга в ручном режиме. В ходе эксплуатации системы детектор измеряет параметры биопсийной иглы, в частности, силу давления иглы, положение иглы, угол наклона, которые передаются в компьютерную систему, обрабатывающую, поступающие сигналы с помощью специального программного обеспечения, и передающую необходимые данные для автоматической корректировки различных параметров биопсийной иглы - системе тактильного управления. При этом на экране монитора компьютерной системы отображается виртуальный вид планирования, обеспечивающий надежность проведения операции со всеми необходимыми для проведения успешной операции предпочтительными параметрами биопсийной иглы. Однако проведение операции биопсии с помощью известной роботизированной установки [7] сопряжено с высоковероятным появлением у пациента чувства сильной тревоги и опасности для жизни, поскольку для операции используется биопсийная игла значительной длины, при этом пациент в сознании и лежит на спине, кроме того, биопсийная игла ничем не прикрыта, а пациент находится в довольно узком пространстве, способствующим усилению тревожного состояния, сформировавшегося незадолго до операции пункционной биопсии.
В этой связи, в целях комфортного и безопасного проведения операции для пациента, существует потребность использования в автоматизированных хирургических установках для проведения малоинвазивных хирургических вмешательств, биопсийных игл, исключающих их попадание в поле зрения пациента.
Из уровня техники известно устройство для биопсии (см. RU 2177751, кл. A61B 17/34, публ. 2002 г. [8]).
В известном устройстве для биопсии [8] пункционная игла помещена в цилиндрический корпус. Важной особенностью работы устройства является то, что нижний конец корпуса погружают в жидкий азот до 5 секунд. Затем охлажденное устройство рабочим торцом устанавливают на интересующий участок. Далее в корпус вставляют иглу, доводят ее острие до касания с промороженной тканью, поступательным и вращательным движением иглы осуществляют забор биопата.
В известном устройстве [8] биопсийная игла помещена в цилиндрический корпус и соответственно пациент при операции ее не наблюдает, однако, известное устройство по форме схоже с медицинским шприцем, в связи с чем у лиц, обладающих повышенной нервной возбудимостью, возможно появление тревожного ощущения, что может пагубно сказаться в ходе проведения пункционной биопсии с использованием известного устройства. Кроме того, известное устройство [8] предназначено исключительно для использования его в ручном режиме с помощью специалиста-хирурга от профессионализма, которого зависит надежность проведения и успех данной операции, при этом возможность использования данного устройства в роботизированной системе для проведения малоинвазивных хирургических вмешательств - не предусмотрена.
Из уровня техники известно устройство для взятия пункции (см. US 8197504, кл. A61B 17/34, публ. 2012 г. [9]).
В известном устройстве [9] игла для биопсии помещается внутрь чашеобразной трубки, рабочий торец, которой примыкает к интересующему участку кожи.
Отличительной характеристикой известного устройства [9] является то, что внутри чашеобразной трубки создается вакуум, обеспечивающий втягивание внутрь трубки интересующего участка кожи для осуществления прокола и последующего захвата биопата.
Данное устройство [9] комфортно, надежно и безопасно в использовании, оно может быть приспособлено для работы в автоматическом режиме в роботизированных установках для проведения малоинвазивных хирургических вмешательств, однако, у данного устройства [9] весьма узкая область применения - исключительно для проникновения биопсийной иглы в ткани стенок желудка с целью осуществления забора биопата.
Наиболее близким аналогом предлагаемого устройства для выполнения малоинвазивных хирургических вмешательств является устройство для выполнения пункционной биопсии, используемое в роботизированной системе для проведения малоинвазивных хирургических вмешательств (см. US 2009112119, кл. A61B 10/02, публ. 2009 г. [10]).
Известное устройство [10] выполнено в виде чашеобразного элемента рабочий торец, которого снабжен буртиком, внутри упомянутого элемента размещена биопсийная игла с механизмами, приводящими ее в рабочее состояние.
Известное устройство для биопсии [10] успешно используется в роботизированной системе для проведения хирургических операций, обладает широкой областью применения, оно удобно и надежно в эксплуатации, не провоцирует появление тревожных состояний у детей, лиц преклонного возраста, а также лиц с повышенной нервной возбудимостью. Малоинвазивное хирургическое вмешательство с помощью устройства [10] проходит преимущественно в автоматическом режиме, соответственно успех и надежность проведения операции не зависит от профессионализма и таланта хирурга под обязательным контролем, которого проходит пункционная биопсия.
Из недостатков известного устройства [10] можно отметить его сложное конструктивное выполнение, позволяющее сообщать биопсийной игле вращательное и поступательное движение и сложную конфигурацию и форму самой биопсийной иглы, что в свою очередь приводит к усложнению производства и соответственно к повышению рыночной стоимости данного устройства и самой роботизированной системы для проведения хирургических операций. Помимо сказанного, в процессе операции пункционной биопсии возможно частичное смещение чашеобразного элемента относительно места его изначальной фиксации, в виду того, что упомянутый элемент закреплен на теле с помощью ремня, охватывающего с двух сторон все тело пациента. Таким образом, у известного устройства [10] не достаточно надежно разработан замысел в отношении фиксации чашеобразного элемента на теле пациента при проведении операции пункционной биопсии.
Раскрытие изобретения
Задачей предлагаемой группы изобретений, объединенных единым изобретательским замыслом, является создание единой инновационной полностью автоматизированной технологии для проведения пункционной биопсии, обладающей высокими медицинскими показателями и эксплуатационными характеристиками, позволяющей пациентам затрачивать наименьшее количество времени на послеоперационное восстановление, кроме того, не требующей постоянного человеческого контроля функционирования технологии и вмешательства, обслуживающего персонала в ход проведения операции пункционной биопсии.
Техническим результатом, предлагаемой автоматической роботизированной установки для осуществления малоинвазивного хирургического вмешательства, является повышение надежности захвата образцов биопата, позволяющих подтвердить доброкачественный или злокачественный характер образования, повышение точности проведения непосредственного хирургического вмешательства, уменьшение вероятности повреждения критичных органов и как следствие значительное уменьшение вероятности развития осложнений.
Указанный технический результат достигается тем, что автоматическая роботизированная установка для осуществления малоинвазивного хирургического вмешательства, содержит робот-манипулятор подвижный элемент, которого на концевом участке содержит средство для выполнения чрескожной пункционной биопсии, операционное вмешательство, которого контролируется компьютерной системой, а его ход отображается на ее мониторе, при этом робот-манипулятор содержит, анестетик и антисептик, находящиеся под давлением, средство, служащее для проведения глубокой анестезии и блок управления, с которым взаимодействуют сервоприводы, выполненные с возможностью механического управления, указанного подвижного элемента и средства для выполнения чрескожной пункционной биопсии, выполненного в виде U-образной насадки, внутри которой расположены выводное сквозное отверстие для подачи анестетика и антисептика для поверхностной анестезии, направляющая игла для внутритканевой анестезии, направляющая игла для пункционной биопсии и блок механизмов управления указанными иглами, при этом упомянутая компьютерная система выполнена с возможностью получения и обработки КТ-срезов очагового образования, передающихся от компьютерной системы томографа, а также с возможностью осуществления разметки хода и последующего моделирования операционного малоинвазивного хирургического вмешательства с помощью специального программного обеспечения.
По одному из предпочтительных вариантов исполнения автоматической роботизированной установки, используемый антисептик и анестетик помещены в аэрозольные баллоны.
Также по одному из предпочтительных вариантов выполнения автоматической роботизированной установки, робот-манипулятор выполнен с возможностью закрепления его стационарно на полу или на потолке.
По одному из частных вариантов изготовления автоматической роботизированной установки робот-манипулятор выполнен с возможностью мобильного перемещения посредством оснащения его передвижными колесами.
Робот-манипулятор может быть оснащен средством экстренной остановки, обеспечивающейся за счет нажатия кнопки мгновенного отключения.
Является целесообразным если средство, служащее для проведения глубокой анестезии, выполнено в виде поршневого механизма с электрическим мотором.
Предпочтительно если поршневой механизм помещен в цилиндрическую емкость.
По одному из предпочтительных вариантов изготовления автоматической роботизированной установки подвижный элемент робота-манипулятора выполнен в виде активного многозвенного привода.
Предлагаемая автоматическая роботизированная установка осуществляет надежное малоинвазивное хирургическое вмешательство, а именно процедуру пункционной биопсии, при этом данная система не проводит обширные разрезы кожи и не применяет общий наркоз для проведения операции. Данная установка позволяет проводить надежный и быстрый захват образцов ткани, позволяющих подтвердить доброкачественный или злокачественный характер образования.
Благодаря тому, что робот-манипулятор содержит анестетик и антисептик, находящиеся под давлением, а также средство, служащее для проведения внутретканевой анестезии, обеспечивается мгновенное обеззараживание поверхности кожи пациента и выброс анестетика для поверхностной анестезии из выводного сквозного отверстия, расположенного внутри U-образной насадки для проведения пункции, после чего незамедлительно происходит выдвижение направляющей иглы для внутритканевой анестезии, которая проходит сквозь кожу пациента, продвигается послойно под кожу, вводя анестетик в соответствии с ранее установленными в автоматическом режиме условиями, сформированными с помощью специального программного обеспечения.
Благодаря тому, что подвижный элемент робота-манипулятора выполнен в виде активного многофункционального многозвенного привода, а сервоприводы связаны с блоком управления, получающим параметры и условия выполнения хирургического вмешательства, и выполнены с возможностью управления упомянутого привода и соответственно U-образной насадки внутри, которого установлена игла для пункционной биопсии, а также блок управляющих механизмов, благодаря тому, что компьютерная система выполнена с возможностью получения и обработки КТ-срезов очагового образования, передающихся от компьютерной системы томографа, а также благодаря тому, что компьютерная система выполнена с возможностью разметки хода и последующего моделирования процедуры для безошибочного роботизированного малоинвазивного хирургического вмешательства, обеспечивается повышение надежности захвата образцов биопата, так как компьютерной системой выбираются условия и параметры, наносящие минимальный вред соседним органам, происходит повышение точности непосредственного хирургического вмешательства, поскольку при компьютерном анализе выбираются оптимальные параметры и условия движения пункционной иглы, позволяющие с исключительной точностью направить иглу в нужную точку, тем самым уменьшая вероятность повреждения критичных органов, в связи с чем, уменьшается вероятность развития возможных осложнений.
Техническим результатом, предлагаемого способа проведения малоинвазивного хирургического вмешательства, является сокращение времени его проведения, повышение надежности захвата образцов биопата, позволяющих подтвердить доброкачественный или злокачественный характер образования, минимизация болевых ощущений при непосредственном проведении хирургического вмешательства, уменьшение вероятности повреждения критичных органов и как следствие значительное уменьшение вероятности развития осложнений, уменьшение времени восстановления пациента после выполнения пункционной биопсии, а также исключение воздействия ионизирующего излучения на обслуживающий роботизированную установку персонал.
Указанный технический результат достигается тем, что способ проведения малоинвазивного хирургического вмешательства, включает оценку локализации и параметров очагового образования, а так же выбор участка пункции с помощью компьютерной томографии и выполнение чрескожной пункционной биопсии очагового образования с помощью биопсийной иглы, при этом, изготовленные компьютерной системой томографа КТ-срезы очагового образования направляются в компьютерную систему автоматической роботизированной установки, осуществляющей малоинвазивное хирургическое вмешательство, посредством, которой выполняется разметка хода и моделирование пункционной биопсии, а полученные ею упомянутые КТ-срезы очагового образования в трехмерной проекции подвергаются компьютерному анализу в целях автоматизированного установления оптимальных параметров и условий проведения роботизированного операционного вмешательства, осуществляемого U-образной насадкой подвижного элемента робота-манипулятора внутри, которой помещена упомянутая биопсийная игла и блок механизмов для ее механического управления, по окончании определения упомянутых параметров и условий, осуществляется касание упомянутой U-образной насадки участка кожи пациента, проводится поверхностная и внутритканевая анестезия указанного участка и последующее чрескожное движение пункционной иглы для взятия материала, обеспечивающиеся в соответствии с установленными ранее параметрами и условиями для проведения соответствующего операционного вмешательства, на всем протяжении, которого томографом осуществляется его сканирование и проецирование его хода на монитор компьютерной системы.
Является наиболее предпочтительным, если КТ-срезы очагового образования в трехмерной проекции подвергаются компьютерному анализу в целях автоматизированного установления виртуального участка соприкосновения U-образной насадки и поверхности тела пациента, заключающееся в планировании и моделировании безопасного движения активного многозвенного привода к участку контакта, определяются точки входа и маршруты направляющей иглы для внутритканевой анестезии, этапы поверхностной и внутритканевой анестезии, а также участок и маршруты пункционной иглы для забора биопата.
Целесообразно если точки входа направляющей иглы для внутретканевой анестезии и иглы для пункционной биопсии определяются путем выявления края воздух-кожа по плотности HU (единиц Хаусфилда).
По одному из предпочтительных вариантов осуществления маршруты иглы для внутритканевой анестезии определяются по разнице плотностей кожи и слоев мышечной ткани.
Является наиболее предпочтитльным если маршруты игл определяются с возможностью коррекции хода процедуры оператором.
Наиболее предпочтительно если маршруты иглы для пункционной биопсии определяются с учетом возможности минимального воздействия на сосуды и критичные органы пациента.
По одному из частных вариантов осуществления предлагаемого способа минимальное воздействие на сосуды и критичные органы пациента обеспечиваются с помощью проведения КТ с в/в (внутривенным) контрастированием или проведения МРТ.
Целесообразно для осуществления контроля дыхания пациента, к роботу-манипулятору подключать средство контроля экскурсии грудной клетки, при этом на пациента вешается пояс, контролирующий изменение объема грудной клетки. По одному из частных вариантов исполнения способа на глаза пациента одевают медицинские очки, на которых отображаются данные о его дыхании во время сканирования и поступающие данные в реальном времени. Целесообразно если пациент осуществляет вдох равный по глубине вдоху во время сканирования.
По одному из частных вариантов использования способа перед установлением параметров и условий проведения операционного вмешательства, производят калибровку робота-манипулятора по координатам томографа. Предпочтительно, если калибровка выполняется при помощи U-образной насадки для пункции, которая при помощи активного многозвенного привода робота-манипулятора двигается до положения совмещения своих меток с метками лазеров томографа, далее робот-манипулятор фиксируется стопорами на месте.
С помощью предложенного способа, наилучшим образом, осуществляется малоинвазивное операционное вмешательство, а именно пункционная биопсия органов грудной клетки, малого таза, брюшной полости и конечностей.
Предлагаемый роботизированный автоматический способ проведения пункционной биопсии лишен недостатков известного способа хирургической биопсии, в том числе и необходимости проведения обширных разрезов кожи и применения общего наркоза.
В предлагаемом роботизированном способе, изготовленные компьютерной системой томографа КТ-срезы очагового образования направляются в компьютерную систему автоматической роботизированной установки, осуществляющей малоинвазивное хирургическое вмешательство, при этом посредством компьютерной системы упомянутой автоматической установки выполняется разметка хода и моделирование пункционной биопсии, а полученные ею упомянутые КТ-срезы очагового образования в трехмерной проекции подвергаются компьютерному анализу с целью автоматизированного установления оптимальных параметров и условий, с помощью специального программного обеспечения для проведения соответствующего роботизированного операционного вмешательства.
Указанный прием обеспечивает повышение надежности захвата образцов биопата, позволяющих подтвердить доброкачественный или злокачественный характер образования, так как, компьютерной системой выбираются условия и параметры, наносящие минимальный вред соседним органам, происходит снижение вероятности повреждения критичных органов, поскольку при компьютерном анализе выбираются оптимальные параметры движения пункционной иглы, позволяющие с исключительной точностью и аккуратностью направить иглу в определенную точку, что в свою очередь уменьшает вероятность развития возможных осложнений и соответственно значительно уменьшает время на послеоперационное восстановление пациента.
Благодаря тому, что непосредственно перед операцией пункционной биопсии заранее известны все условия и параметры ее проведения, значительно повышается качество и сокращается время проведения самой процедуры, поскольку операция проходит в роботизированном безошибочном режиме по заранее сформированной программе без траты времени на изучение внутренних органов при непосредственной биопсии для ее качественного и надежного выполнения.
В результате того, что проводится поверхностная и внутритканевая анестезия, выбранного участка у пациента и последующее чрескожное движение пункционной иглы для взятия материала, обеспечивается минимизация болевых ощущений и максимальный комфорт для пациента при непосредственном проведении хирургического вмешательства.
Кроме того, в сущности, весь процесс предлагаемого автоматизированного малоинвазивного роботизированного хирургического вмешательства проходит на столе, внутри гентри томографа, что практически полностью исключает воздействие рентгеновского излучения на обслуживающий персонал.
Техническим результатом, предлагаемого устройства для выполнения чрескожной пункционной биопсии, является минимизация нарушения целостности кожи, существенное снижение риска развития инфекции и таких осложнений как кровотечение, пневмоторакс и ателектаз легких, повышение надежности и точности проведения процедуры, улучшение фиксации на интересующем участке кожи пациента, минимизация болевых ощущений, а также уменьшение вероятности повреждения критичных органов.
Указанный технический результат достигается тем, что устройство для выполнения чрескожной пункционной биопсии, содержит биопсийную иглу, установленную внутри полой U-образной в продольном сечении насадки с открытым основанием, фиксирующимся на кожном участке пациента, насадка изготовлена с переменной шириной относительно ее высоты, при этом ширина ее основания увеличивается в сторону указанного кожного участка пациента, при этом внутри насадки расположены выводное сквозное отверстие для подачи анестетика и антисептика для поверхностной анестезии, направляющая игла для внутритканевой анестезии, а также блок механизмов для управления подачи поверхностной анестезии и всеми упомянутыми иглами, обеспечиваемого в соответствии с заранее автоматически установленными оптимальными параметрами и условиями для проведения роботизированной чрескожной пункционной биопсии.
Предлагаемая U-образная в продольном сечении насадка выполнена с переменной шириной относительно ее высоты, при этом ширина ее основания увеличивается в сторону кожного участка пациента. Данный конструктивный прием за счет, полученных такой конструкцией с переменной шириной и своего рода кольцевым буртиком, всасывающих свойств, обеспечивает наилучшее сцепление насадки с кожей пациента со слегка ее всасыванием внутрь самой насадки. Предложенная конструкция насадки, как таковая, обеспечивает существенное снижение вероятности развития инфекции, поскольку по существу, "оперируемый" участок кожи закрыт насадкой и не допускает попадание какой-либо инфекции через игловые отверстия.
Согласно предложенному изобретению внутри насадки расположены биопсийная игла, отверстие для подачи анестетика и антисептика для поверхностной анестезии, игла для внутритканевой анестезии, а также блок управления для управления анестезией и всеми иглами, что позволяет достигать минимального повреждения кожного покрова (используются тонкие иглы) и соответственно минимальных болевых ощущений.
Блок управления предлагаемой насадки выполнен с возможностью принятия и обработки информации от компьютерной системы роботизированной установки, для осуществления управлением всеми иглами и анестезией в полном соответствии с заранее установленными оптимальными параметрами и условиями для проведения роботизированной чрескожной пункционной биопсии, что в свою очередь позволяет повысить надежность и точность проведения процедуры, обеспечивая при этом существенное уменьшение вероятности повреждения критичных органов.
Краткое описание чертежей
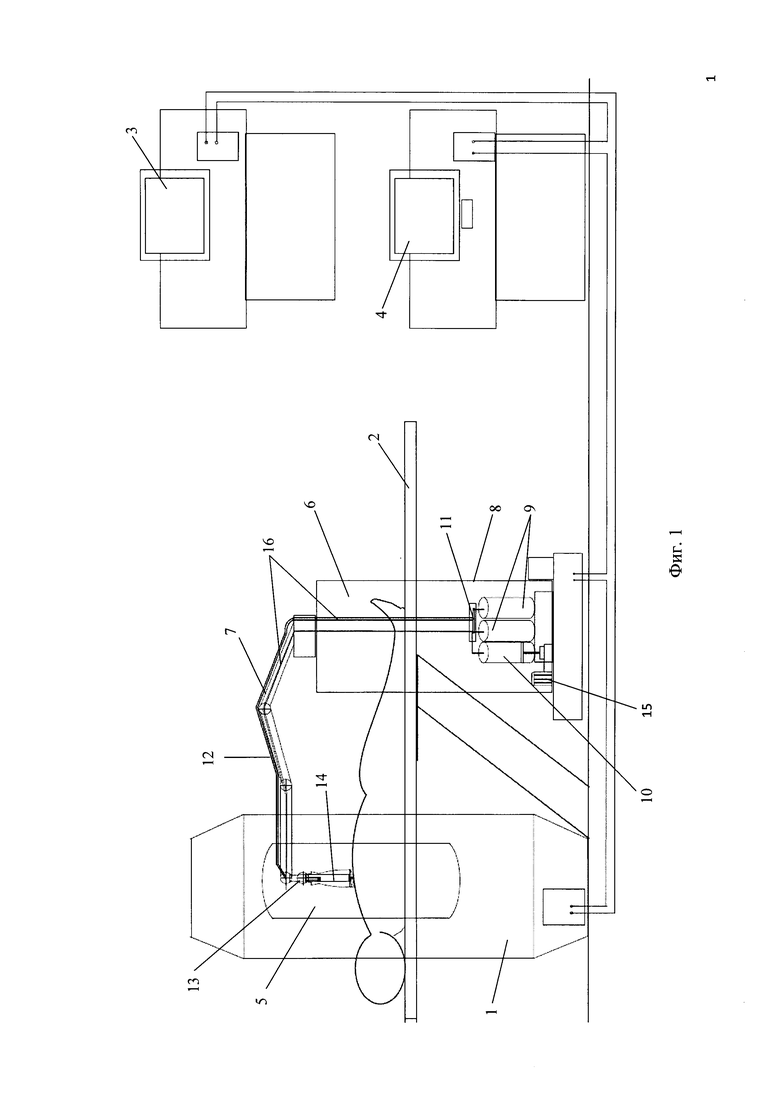
На фиг. 1 представлен общий вид предлагаемой автоматической роботизированной системы с подключенным к ней томографом, снабженным соей компьютерной системой;
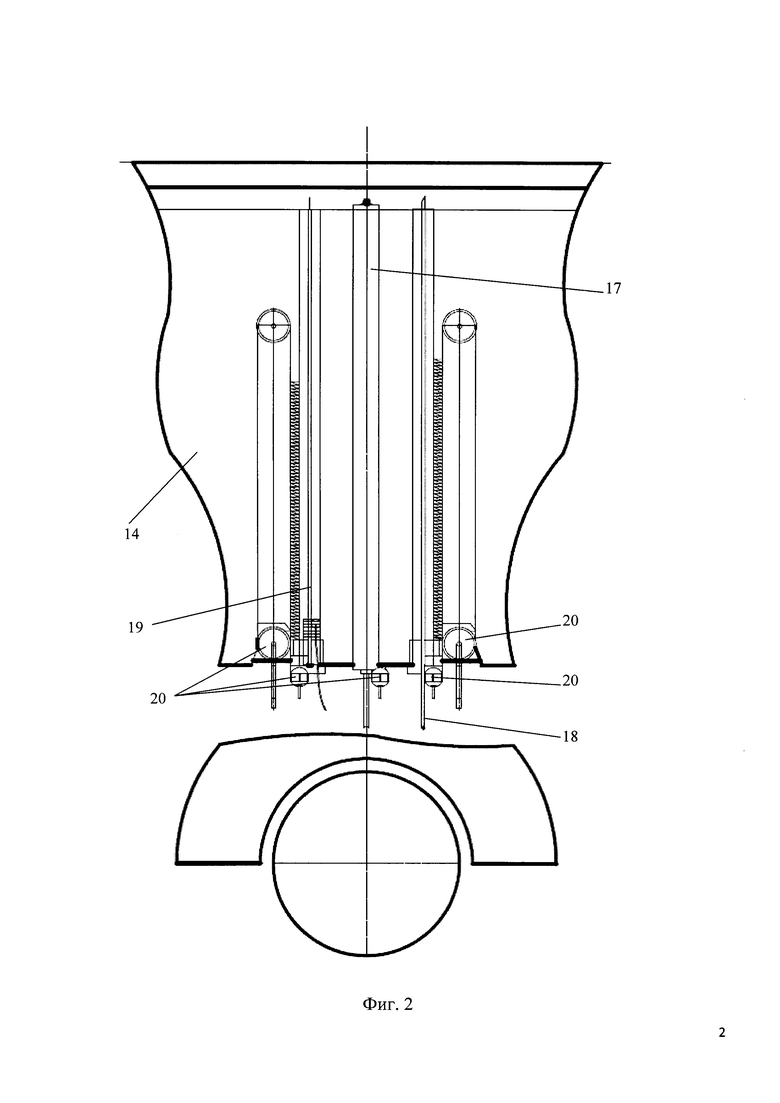
На фиг. 2 представлен продольный разрез предлагаемой насадки для проведения операционного вмешательства в виде пункционной биопсии;
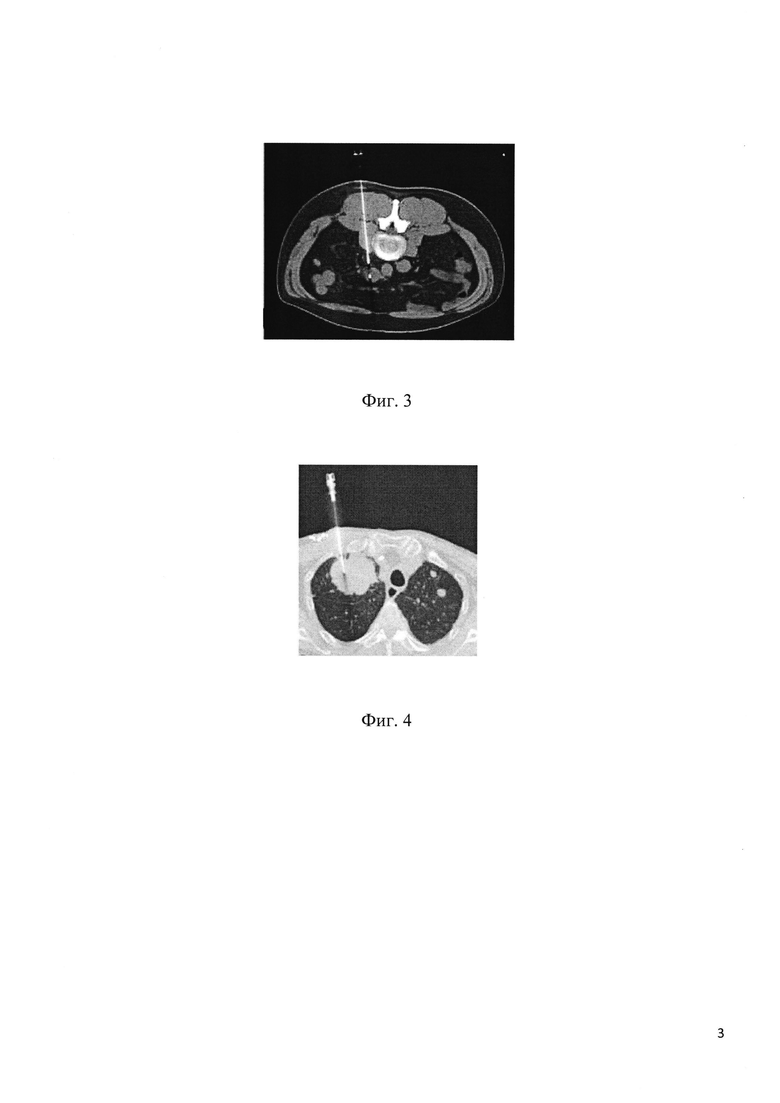
На фиг. 3 представлено изображение КТ-среза автоматического планирования траектории движения биопсийной иглы;
На фиг. 4 представлено изображение КТ-среза движения биопсийной иглы в режиме реального времени.
Осуществления изобретения
Предлагаемая группа изобретений поясняется конкретным примером реализации, который, однако, не является единственно возможным, но наглядным образом демонстрирует достижение указанными совокупностями существенных признаков объективно проявляющегося технического результата, который решает, поставленную перед группой изобретений задачу.
В предлагаемую автоматическую роботизированную технологию, с помощью которой осуществляется малоинвазивное хирургическое вмешательство, включены следующие устройства и элементы:
- компьютерный томограф (КТ) 1;
- стол томографа 2;
- компьютерная система томографа 3;
- компьютерная система роботизированной установки 4;
- апертура томографа 5;
- робот-манипулятор 6;
- активный многозвенный привод 7;
- корпус робота-манипулятора 8;
- аэрозольные баллоны 9 для анестетика и антисептика;
- поршневой механизм 10 с помощью, которого осуществляется поверхностная анестезия;
- резиновые трубки 11;
- звенья активного привода 12;
- коннектор 13;
- полая насадка 14 для выполнения пункционной биопсии;
- электромотор 15 поршневого механизма;
- сервоприводы 16;
- сквозное отверстие 17, предназначенное для подачи поверхностной анестезии;
- направляющая игла 18 для внутритканевой анестезии;
- пункционная игла 19 для пункционной биопсии;
- блок механизмов 20, осуществляющий управление, указанными иглами и подачу поверхностной анестезии.
Автоматическая роботизированная установка для осуществления малоинвазивного хирургического вмешательства содержит робот-манипулятор 6, подвижный элемент, которого выполнен в виде многозвенного активного привода 7. На концевом участке многозвенного активного привода 7 установлен коннектор 13, к которому присоединена U-образная полая насадка 14, которая выполняет пункционную биопсию.
Операционное вмешательство U-образной насадки 14 полностью контролируется компьютерной системой роботизированной установки 4. Результаты предоперационных исследований "интересующего участка" и непосредственно ход операционного вмешательства отображаются на мониторе компьютерной системы 4.
Робот-манипулятор 6 содержит анестетик и антисептик, находящиеся под давлением в аэрозольных баллонах 9, средство, служащее для хранения и подачи глубокой анестезии, выполненное в виде поршневого механизма 10 с электромотором 15 и блок управления (на фиг. не изображен).
С упомянутым блоком управления взаимодействуют сервоприводы 16, имеющие возможность механического управления активного многозвенного привода 7 и собственно U-образной полой насадки 14, осуществляющей непосредственное малоинвазивное вмешательство, заключающееся в проведении пункционной биопсии.
Внутри U-образной полой насадки 14 расположены выводное сквозное отверстие 17 для подачи анестетика и антисептика для поверхностной анестезии, направляющая игла 18 для внутритканевой анестезии, направляющая игла 19 для пункционной биопсии, а также блок механизмов 20 управления упомянутыми иглами и выбросом поверхностной анестезии.
Компьютерная система роботизированной установки 4 выполнена с возможностью получения и обработки КТ-срезов очагового образования, которые передаются от компьютерной системы томографа 3, а также с возможностью осуществления разметки хода и последующего моделирования операционного малоинвазивного хирургического вмешательства с помощью специального программного обеспечения.
Робот-манипулятор 6 оснащен средством экстренной остановки, обеспечивающейся за счет нажатия кнопки мгновенного отключения (на фиг. не обозначена).
Работает предлагаемая группа изобретений следующим образом.
Предлагаемая автоматическая роботизированная установка, в сущности, состоит из подвижного робота-манипулятора 6 с подключенной к нему, управляющей и контролирующей его компьютерной системой 4.
Прежде чем начинать процедуру при подвижном варианте автоматической роботизированной установки, необходимо произвести ее калибровку по координатам КТ 1. Однако при стационарном способе крепления калибровка при каждом выполнении процедуры малоинвазивного хирургического вмешательства не требуется.
После калибровки предлагаемой автоматической роботизированной установки за нулевую точку принимается ISO-центр КТ (x0; y0; z0). Смещение происходит в осях Y и X за счет движения активного многозвенного привода 7. При этом ограничением является размер апертуры 5 КТ 1 и размер U-образной насадки 14, расположенной на конце активного многозвенного привода 7. В оси Z происходит смещение за счет движения стола томографа 2. При этом координата x0y0z0 после калибровки соответствует кончику иглы для пункции 19. После получения данных о пациенте в компьютерную систему роботизированной установки 4 поступают снимки DICOM формата из компьютерной системы томографа 3. С помощью определения плотности в единицах HU определяются края тела пациента по разнице плотности воздух-ткань. При этом определяются возможные координаты для безопасного движения активного многозвенного привода 7 и U-образной насадки 14 робота-манипулятора 6 в апертуре 5 КТ 1 для осуществления манипуляции.
Для выполнения калибровки (при подвижном варианте автоматической роботизированной установки) оператор устанавливает ее вблизи КТ 1 и осуществляет движение активного многозвенного привода 7 с U-образной насадкой 14 и двигает его до тех пор, пока метки на U-образной насадке 14 не совместятся с лазерами КТ 1. После установки автоматическая роботизированная установка фиксируется стопорами на месте. Активный многозвенный привод 7 с U-образной насадкой 14 выходят из апертуры 5 КТ 1 и устанавливаются в исходном положении таким образом, чтобы не мешать ходу выполнения сканирования пациента.
Далее пациента полностью раздевают, укладывают на стол томографа 2 и с помощью КТ 1 производят сканирование в области предполагаемого малоинвазивного хирургического вмешательства. Подключают датчик контроля экскурсии для сканирования подвижных органов пациента. Изготовленные компьютерной системой томографа 3 КТ-серии срезов очагового образования отправляются в компьютерную систему роботизированной установки 4 с помощью, которой происходит разметка хода и моделирование пункционной биопсии (с помощью специального программного обеспечения). Полученные компьютерной системой роботизированной установки 4 КТ-срезы очагового образования в трехмерной проекции подвергаются компьютерному анализу в целях автоматизированного установления оптимальных параметров и условий проведения роботизированного операционного вмешательства (с помощью специального программного обеспечения), а именно на указанных КТ-срезах, с помощью компьютерной системы роботизированной установки 4 в трехмерной проекции, определяются:
- виртуальное место соприкосновения U-образной полой насадки 14 и тела пациента (автоматическая роботизированная установка планирует и моделирует точное и безопасное движение активного многозвенного привода 7 к участку контакта);
- определяется участок стыковки U-образной полой насадки 14 с пациентом;
- определяются точки входа направляющей иглы для внутритканевой анестезии 18 и иглы для пункционной биопсии 19, а также все необходимые этапы анестезии с учетом отдельных особенностей каждого пациента;
- определяется оптимальная траектория перемещения иглы для пункционной биопсии 19.
Точки входа указанных игл 18 и 19 определяются путем выявления края воздух - кожа по плотности HU. Маршруты иглы для внутритканевой анестезии 18 определяются по разнице плотностей кожи и слоев мышечной ткани. Маршруты иглы для пункционной биопсии 19 определяются с учетом возможности минимального воздействия на сосуды и критичные органы. Маршруты игл 18, 19 определяются с возможностью коррекции хода процедуры оператором. Для обеспечения минимального воздействия на сосуды и критичные органы сканирование с помощью КТ 1 можно проводить с в/в контрастированием. Кроме того, в некоторых случаях возможно осуществлять контроль дыхания.
Для осуществления контроля дыхания предварительно при биопсии сложных подвижных участков к автоматической роботизированной установке заранее подключают датчик контроля экскурсии грудной клетки (на фиг. не показан). На пациента вешается пояс, который контролирует изменение объема грудной клетки. При этом также заранее на глаза пациента надеваются очки, отображающие кривую его дыхания во время сканирования, и кривую дыхания в реальном времени. Пациент должен осуществить вдох равный по глубине вдоху во время сканирования. Однако как было оговорено ранее, делается это в исключительных случаях, только при биопсии грудной клетки и не практикуется с пациентами преклонного возраста, которым затруднительно проводить такую манипуляцию.
Далее, при заданных оптимальных условиях и параметрах предлагаемая автоматическая роботизированная установка начинает выполнение процедуры малоинвазивного хирургического вмешательства.
На всем протяжении процедуры автоматическая роботизированная установка подключена к КТ 1 и имеет возможность осуществлять полное управление и контроль КТ 1, в частности для осуществления возможности контроля стола 2, контроля угла его наклона и для возможности проведения сканирования.
После завершения процедуры планирования происходит запуск и расчет процедуры выполнения операции пункционной биопсии. Размеры U-образной полой насадки 14 зависят от выбранного типа пункционной иглы 19, длина которой может варьироваться от 10 до 30 см, при этом размеры апертуры 5 КТ 1 составляют 70 см. Далее на столе 2 КТ 1 пациент перемещается таким образом, чтобы хватало места для пункционной биопсии. В некоторых редких случаях для осуществления манипуляции может понадобиться смена положения на бок, либо на живот. Робот-манипулятор 6 определяет расстояние от поверхности пациента до максимальной верхней точки апертуры 5, используя данные HU. В случае, если расстояние недостаточно для осуществления процедуры малоинвазивного хирургического вмешательства, робот манипулятор 6 производит команды к смещению пациента до тех пор, пока расстояние будет достаточным для точного и безопасного передвижения активного многозвенного привода 7 робота-манипулятора 6. После продвижения активного многозвенного привода 7 с U-образной полой насадкой 14 в апертуру 5 КТ 1 происходит касание U-образной полой насадкой 14 поверхности кожи, что в свою очередь активирует датчик давления и робот-манипулятор 6 останавливает свое движение. Далее по мере необходимости КТ 1 по команде робота-манипулятора 6, может менять угол наклона стола 2 и одновременно робот-манипулятор 6 может осуществлять изменение угла положения U-образной полой насадкой 14. Важно отметить, что если во время процедуры планирования осуществлялся наклон КТ 1 в сторону ног пациента, а пациент лежал головой в гентри КТ 1, то соответственно робот-манипулятор 6 меняет свое положение так, чтобы доступ в апертуру 5 сохранился. При этом передвижной робот-манипулятор 6 необходимо переместить и повторить процесс калибровки.
После того, как между КТ 1 и роботом-манипулятором 6 достигнуты все условия и параметры для проведения успешной и надежной операции, в частности, такие как положение угла наклона стола 2 и оптимальное расстояние робота-манипулятора 6 от гентри КТ 1, происходит процесс сканирования, а именно КТ 1 делает одно сканирование, таким образом, чтобы оператор смог проконтролировать положение U-образной полой насадкой 14. На контрольном скане отображается ход процедуры. Далее из аэрозольных баллонов 9 и при необходимости из поршневого механизма 10 происходит выброс антисептика для обеззараживания поверхности и выброс анестетика для поверхностной анестезии, через резиновые трубки 11 осуществляется движение анестетика и антисептика, проходят внутри активного многозвенного привода 7, далее через коннектор 13 и попадают в U-образную полую насадку 14, а конкретно в сквозное отверстие 17, предназначенное для выброса поверхностной анестезии на зафиксированный участок кожи пациента.
Далее выдвигается направляющая игла 18 для внутритканевой анестезии и входит под кожу пациента. В это время делается контрольный скан. Оператор оценивает параметры и условия положения иглы 18. Затем игла для внутритканевой анестезии 18 продвигается послойно под кожу, вводя анестетик в соответствии с ранее установленными параметрами и условиями. В это время КТ 1 продолжает делать контрольные сканы. По завершении анестезии игла 18 для внутритканевой анестезии аккуратно и точно возвращается в исходное положение. Далее выдвигается пункционная игла 19 для проведения пункционной биопсии, которая продвигается в область интереса для взятия материала. При этом на всем протяжении операции с помощью КТ 1 происходит сканирование хода манипуляции и проецирование всех действий на монитор компьютерной системы роботизированной установки 4. Как только пункционная игла 19 достигает выбранной точки, происходит взятие материала и ее возвращение в исходное положение.
Для мест требующих контроля дыхания процедура осуществляется с синхронизацией по дыханию из записанной ранее кривой дыхания. Робот-манипулятор 6 производит манипуляцию в тот момент, когда кривая реального времени совпадает с загруженной, а контроль движение пациента происходит по оценке HU в выбранной области. Если пациент двигался, робот-манипулятор 6 даст сигнал.
При этом важно отметить, что активный многозвенный привод 7 имеет несколько звеньев для обеспечения подвижности. По активному приводу 7 проходят кабеля, валы, полые трубки, соединяющие робот-манипулятор 6 с U-образной полой насадкой 14. Коннектор 13, размещенный на конце активного привода 7, выполнен с возможностью осуществления связи его механизмов с U-образной полой насадкой 14 для выполнения определенных движений последней (прямолинейных, вращательных и др.), а также движения игл 18 и 19 и подачи лекарственных препаратов (анестезии) и других определенных ранее движений, вращений в соответствии с установленными ранее параметрами и условиями для выполнения успешной и надежной пункционной биопсии.
В случае возникновения экстренных непредвиденных ситуаций: отключение электричества, сильное движение пациента, ошибки в манипуляции и т.п., робот-манипулятор 6 оборудован кнопкой экстренной остановки. В случае ее нажатия происходит полное обесточивание всех механизмов входящих в состав, предложенной технологи малоинвазивного хирургического вмешательства, при этом все иглы 18 и 19 соответственно возвращаются в исходное положение с помощью пружин взаимодействующих с ними, при этом при отсутствии питания сервоприводы 16 находятся в свободном вращении.
Пример 1.
Мужчина, 47 лет.
На плановой рентгенографии ОГК выявлено образование верхней доли "правого легкого размером до 0,5 см. Больной отправлен в стационар на дообследование.
Stprasens: Температура 36.7, ЧДД 22 в минуту, ЧСС 71 уд/мин.
Общий анализ мочи и крови не изменен.
Жалобы: активно не предъявляет.
Из вредных привычек отмечает курение с 12 лет.
Пункция под контролем рентгенографии затруднительна в связи с небольшим размером образования. Больному провели контрольное КТ исследование, на котором выявлено образование округлой формы до 0.5 см в верхней доле правого легкого. Других изменений в органах грудной клетки не выявлено. Решено провести пункцию данного участка с помощью предлагаемой технологии малоинвазивного хирургического вмешательства под контролем КТ. Полученные данные КТ были переданы в компьютерную систему управления автоматической роботизированной установки, с помощью, которой было выполнено моделирование и разметка хода процедуры пункции, а также определены все оптимальные параметры и условия для процедуры пункции.
Данные были переданы на саму автоматическую роботизированную установку (робот-манипулятор 6 с компьютерной системой 4), которая осуществила манипуляцию с использованием U-образной полой насадки 14 для пункции. Во время манипуляции происходило непрерывное сканирование с помощью КТ 1 всего хода процедуры для осуществления контроля за важнейшим движением игл для внутритканевой анестезии 18 и для пункции 19, также проводилась анестезия. Таким образом, удалось получить достоверные данные (снимки) попадания пункционной иглы 19 в очаговые образования и взятие оттуда гистологического материала. Материал передан в лабораторию для анализа. Выявлен плоскоклеточный рак.
Диагноз: плоскоклеточный рак верхней доли правого легкого.
Благодаря данной технологии удалось на ранней стадии выявить рак легкого, случайно обнаруженный при плановом обследовании. Незамедлительная пункция малых образований возможна только с использованием предложенной автоматичекой роботизированной системой (робота-манипулятора 6 с компьютерной системой 4), так как она работает в паре с КТ 1, имеет четкую надежную ориентировку по координатам и учитывает экскурсию грудной клетки пациента, что позволяет надежно и успешно проводить пункции малых образований недоступных при рентгеновском контроле.
У больного не выявлено повреждений критичных органов, были минимальные болевые ощущения, появление инфекции - не зафиксировано.
Пример 2
Мужчина, 57 лет.
Поступает с жалобами на желтушность кожных покровов, повышение температуры, общее недомогание, похудание, изменение окраски кала и мочи. Больной госпитализируется в стационар с подозрением на желчнокаменную болезнь. Проведено УЗИ, на котором выявлен небольшой конкремент в проекции желчного пузыря и расширение внутрипеченочных желчных протоков. Для уточнения причины расширения внутрипеченочных желчных протоков больной направлен на МР-холангиографию. Было выявлено расширение внутрипеченочных желчных протоков с обструкцией бифуркации общепеченочного протока и подозрение на наличие в указанном месте образования.
Больному произвести биопсию под контролем УЗИ не удалось, в связи с большим количеством газа в кишечнике, характерными артефактами от камней в желчном пузыре и сложностью в визуализации места сужения. Было произведено КТ с внутривенным контрастированием, на котором выявлено накопление контрастного препарата в проекции общего печеночного протока. Полученные данные КТ были переданы на компьютерную систему 4 управления автоматической роботизированной системой, где было выполнено моделирование и разметка хода процедуры пункции, а также определены все оптимальные параметры и условия для процедуры пункции.
Данные были переданы на саму автоматическую роботизированную установку (робот-манипулятор 6 с компьютерной системой 4), которая осуществила манипуляцию с использованием U-образной полой насадки 14 для пункции.
Во время манипуляции происходило непрерывное сканирование с помощью КТ 1 всего хода процедуры для осуществления контроля за важнейшим движением игл для внутритканевой анестезии 18 и для пункции 19, также проводилась анестезия. Таким образом, удалось получить достоверные данные(снимки) попадания пункционной иглы 19 в образование и взятие оттуда гистологического материала. Материал передан в лабораторию для анализа.
Гистология: Высокодифференцированная аденокарцинома.
В результате проведения пункционной биопсии удалось выявить образование на ранней стадии в месте трудновыполнимым для пункции под контролем УЗИ.
Пункционная биопсия прошла точно и надежно, критичные органы не задеты, болевых ощущений не было, целостность кожи не нарушена. Больной быстро восстановился после данной операции.
Пример 3
Девушка 18 лет.
Поступила в больницу с жалобами на слабость, общее недомогание, повышение температуры до 37,5. При оценке рентгенограммы органов грудной клетки появилось подозрение на увеличение лимфатических узлов средостения. Рекомендовано КТ органов грудной клетки. При КТ определяется увеличение всех групп лимфатических узлов средостения. Для уточнения дигноза решено произвести пункцию внутригрудных лимфотических узлов с помощью предлагаемой технологии малоинвазивного хирургического вмешательства, в связи с тем, что на обычной рентгенограмме внутригрудные лимфотические узлы не диффиренцируются, ультразвук недоступен для пункции средостения.
Полученные данные КТ были переданы на компьютерную систему 4 управления автоматической роботизированной системой, где было выполнено моделирование и разметка хода процедуры пункции, а также определены все оптимальные параметры и условия для процедуры пункции.
Данные были переданы на саму автоматическую роботизированную установку (робот-манипулятор 6 с компьютерной системой 4), которая осуществила манипуляцию с использованием U-образной полой насадки 14 для пункции.
Во время манипуляции происходило непрерывное сканирование с помощью КТ 1 всего хода процедуры для осуществления контроля за важнейшим движением игл для внутритканевой анестезии 18 и для пункции 19, также проводилась анестезия. Таким образом, удалось получить достоверные данные(снимки) попадания пункционной иглы 19 в образование и осуществить надежный и успешный забор оттуда гистологического материала. Материал передан в лабораторию для анализа.
Полученный материал передан на гистологическое исследование, заключение -неказеифицированные эпителиоидные гранулемы.
Диагноз: Саркоидоз.
Данная технология пункционной биопсии позволяет пунктировать структуры с высокой точностью и постоянным контролем со стороны врача, но без его непосредственного вмешательства, что дает возможность для исследования областей с прилежащими жизненно важными органами, не боясь осложнений.
При проведении операции критичные органы не задеты, целостность кожи не нарушена, развитие инфекции не выявлено.
Пример 4
Женщина, 45 лет.
Из анамнеза: резекция левой почки по поводу почечно-клеточного рака. Проходила плановое обследование на КТ, выявлено образование левого надпочечника.
Для пункции выбрана предлагаемая технология, так как для УЗИ визуализации надпочечников крайне затруднительна. Полученный материал после биопсии-метастаз рака почки.
Полученные данные КТ были переданы на компьютерную систему 4 управления автоматической роботизированной системой, где было выполнено моделирование и разметка хода процедуры пункции, а также определены все оптимальные параметры и условия для процедуры пункции.
Данные были переданы на саму автоматическую роботизированную установку (робот-манипулятор 6 с компьютерной системой 4), которая осуществила манипуляцию с использованием U-образной полой насадки 14 для пункции.
Во время манипуляции происходило непрерывное сканирование с помощью КТ 1 всего хода процедуры для осуществления контроля за важнейшим движением игл для внутритканевой анестезии 18 и для пункции 19, также проводилась анестезия. Таким образом, удалось получить достоверные данные(снимки) попадания пункционной иглы 19 в образование и осуществить надежный и успешный забор оттуда гистологического материала. Материал передан в лабораторию для анализа.
С помощью предлагаемой технологии возможно пунктировать образования, находящиеся в труднодоступных местах, быстро и оперативно, не боясь осложнений и без какой-либо сложной предварительной подготовки.
У больной не выявлено осложнений, инфекций, целостность кожи не нарушена. По словам больной самочувствие хорошее, восстановление прошло быстро.
Пример 5
Мужчина, 33 года.
Поступил с жалобами на слабость, снижение аппетита, похудание. Из анамнеза: ВИЧ-инфицированный.
На рентгенограмме органов грудной клетки патологии не выявлено, УЗИ органов брюшной полости и органов малого таза - норма. На МРТ в малом тазу выявлены единичные увеличенные лимфоузлы, местами слившиеся в конгломераты. Ввиду плохой визуализации на УЗИ решено воспользоваться предлагаемой технологией под контролем КТ. Во время разметки хода и моделирования процедуры на компьютерной системе 4 данные КТ были наложены, что облегчило визуализацию образований малого таза и определение точек доступа пункционной иглы 19 и направляющей иглы 18 для внутритканевой анестезии.
Во время манипуляции происходило непрерывное сканирование с помощью КТ 1 всего хода процедуры для осуществления контроля за важнейшим движением игл для внутритканевой анестезии 18 и для пункции 19, также проводилась анестезия. Таким образом, удалось получить достоверные данные(снимки) попадания пункционной иглы 19 в образование и осуществить надежный и успешный забор оттуда гистологического материала. Материал передан в лабораторию для анализа.
После проведенного исследования получен биоптат. Гистология на фоне гиперплазии лимфоидной и ретикулярной ткани специфично присутствие эпителиоидных и гигантских клеток Пирогова-Лангханса.
Диагноз: туберкулез.
На данном примере видно, что с помощью предлагаемой технологии можно проводить сложные пункции без непосредственного участия врача-хирурга, что позволяет не отрывать персонал от лечебной работы для проведения диагностических мероприятий, исключено вредное воздействие рентгеновского излучения и возможные вредные воздействия на персонал, связанные с выполнением данной сложной манипуляции, а также обеспечено значительное понижение вероятности попадания инфекции в область непосредственного хирургического малоинвазивного вмешательства.
По словам больного, болевых ощущений при операции он не испытывал, после операции самочувствие хорошее.
Пример 6
Мужчина, 53 года.
Поступает в больницу для уточнения диагноза.
Из анамнеза: курение с 18 лет.
Считает себя больным в течении 3-х месяцев, когда впервые почувствовал слабость, недомогание, повышение температуры до 37,5 градусов, появился кашель и кровохарканье.
Незамедлительно было проведено рентгенологическое исследование, на котором в верхней доле левого легкого было обнаружено образование размером до 8 мм, неоднородной структуры, с лучистыми контурами и с полостью в центре. Проведена КТ, на которой была выявлена похожая картина с увеличением лимфатических узлов средостения с обеих сторон. Решено пропунктировать данное образование под контролем рентгена. Материал, отправленный на гистологическое исследование, не информативен.
Проведена повторная пункция под контролем рентгена, гистологическое заключение-картина соответствует воспалительным изменениям легочной ткани.
Больному выставлен первоначальный диагноз туберкулез.
Назначен КТ-контроль через 2 недели. За этот период самочувствие улучшилось, температура нормализовалась. Другие специфические реакции на туберкулез отрицательны. При контрольном КТ-исследовании определяется небольшая положительная динамика в виде незначительного уменьшения размеров образования. В связи с отсутствием специфической реакции на туберкулез больного рекомендовано дообследовать для определения этиологии заболевания. Из-за низкой информативности предыдущих двух пункций больного решено отправить на проведение манипуляции с помощью предлагаемой технологии малоинвазивного вмешательства.
Перед пункцией на КТ 1 проведено исследование грудной клетки с контрастированием. Вышеописанный участок активно накапливает контрастный препарат по периферии от полости. Данные с КТ 1 переданы на компьютерную систему 4 роботизированной системы для разметки хода и моделирования процедуры биопсии, а также для определения всех оптимальных параметров и условий для процедуры пункции.
Данные были переданы на саму автоматическую роботизированную установку (робот-манипулятор 6 с компьютерной системой 4), которая осуществила манипуляцию с использованием U-образной полой насадки 14 для пункции.
Во время манипуляции происходило непрерывное сканирование с помощью КТ 1 всего хода процедуры для осуществления контроля за важнейшим движением игл для внутритканевой анестезии 18 и для пункции 19, также проводилась анестезия. Таким образом, удалось получить достоверные данные(снимки) попадания пункционной иглы 19 в образование и удалось осуществить надежный и успешный забор гистологического материала из участка, наиболее активно, накапливающего контрастный препарат.
Материал передан на гистологию.
Заключение: плоскоклеточный рак.
Диагноз: плоскоклеточный рак верхней доли левого легкого.
На данном примере видно, что с помощью предлагаемой технологии малоинвазивного хирургического материала есть возможность производить пункцию не только образования в целом, но и выбранного участка образования для получения надежного максимально точного результата.
У больного не выявлено повреждений критичных органов, былевые ощущения были минимальными, инфекций не выявлено, целостность кожи не нарушена, сама операция прошла быстро и незаметно. Восстановление после операции прошло быстро и легко.
Таким образом, с помощью предлагаемой технологии, наиболее успешно, возможно осуществлять малоинвазивное хирургическое операционное вмешательство, а именно, пункционную биопсию органов грудной клетки, брюшной полости, малого таза и конечностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАВИГАЦИИ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2023 |
|
RU2810445C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ЧРЕСКОЖНОЙ ПУНКЦИОННОЙ БИОПСИИ | 2007 |
|
RU2362490C1 |
| СПОСОБ ЭНДОСКОПИЧЕСКОЙ ДИАГНОСТИКИ САРКОИДОЗА ОРГАНОВ ДЫХАНИЯ ПУТЕМ СЕРИЙНОЙ ЭНДОБРОНХИАЛЬНОЙ КРИОБИОПСИИ | 2024 |
|
RU2836009C1 |
| СПОСОБ ДИАГНОСТИКИ ОПУХОЛЕЙ МАЛОГО ТАЗА | 2013 |
|
RU2547686C2 |
| СПОСОБ СКРИНИНГА НА РАК ЛЕГКИХ | 2023 |
|
RU2817246C1 |
| СПОСОБ ПАРАРЕКТАЛЬНОЙ ПРИЦЕЛЬНОЙ БИОПСИИ ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ С ИСПОЛЬЗОВАНИЕМ СОВМЕЩЕННЫХ ИЗОБРАЖЕНИЙ КОМПЬЮТЕРНОЙ И МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2017 |
|
RU2657200C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ В БРЮШНУЮ ПОЛОСТЬ ДРЕНАЖНЫХ И ПУНКЦИОННЫХ ИНСТРУМЕНТОВ | 1998 |
|
RU2138998C1 |
| КОАКСИАЛЬНАЯ СИСТЕМА ДЛЯ ТРАНСТОРАКАЛЬНОЙ ТРЕПАНОБИОПСИИ НОВООБРАЗОВАНИЙ ГРУДНОЙ ПОЛОСТИ ПОД КОНТРОЛЕМ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ И СПОСОБ ЕЁ ПРИМЕНЕНИЯ | 2019 |
|
RU2734721C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| Способ временного разобщения билио-плевро-легочных свищей | 2021 |
|
RU2783087C1 |
Изобретение относится к области медицины, а именно к пункционной биопсии. Автоматическая роботизированная установка для осуществления малоинвазивного хирургического вмешательства содержит робот-манипулятор, операционное вмешательство которого контролируется компьютерной системой. Робот-манипулятор содержит U-образную насадку, внутри которой расположена игла для пункционной биопсии. Изготовленные компьютерной системой томографа КТ-срезы направляются в компьютерную систему автоматической роботизированной установки, посредством которой выполняется разметка хода и моделирование пункционной биопсии. КТ-срезы очагового образования подвергаются компьютерному анализу в целях автоматизированного установления оптимальных параметров и условий проведения роботизированного операционного вмешательства. КТ осуществляет сканирование и проецирование хода пункции на монитор компьютерной системы. Изобретение обеспечивает точность проведения биопсии и снижает риск развития осложнений за счет использования в роботизированной установке конструктивных особенностей U-образной насадки. 3 н. и 18 з.п. ф-лы, 4 ил., 6 пр.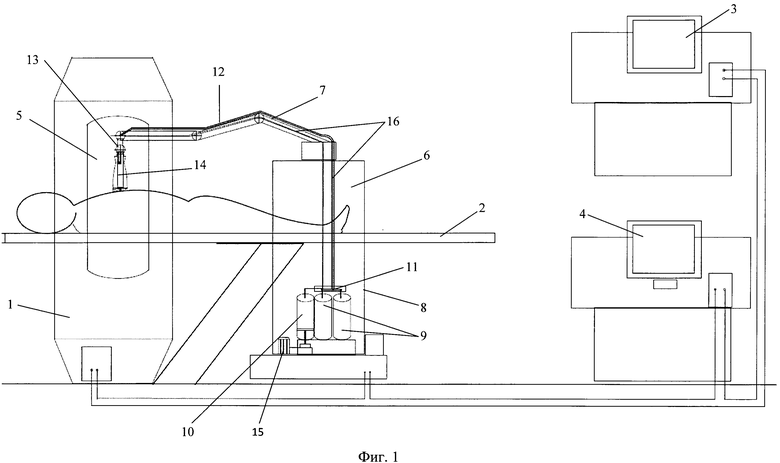
1. Автоматическая роботизированная установка для осуществления малоинвазивного хирургического вмешательства, содержащая робот-манипулятор, подвижный элемент которого на концевом участке содержит средство для выполнения чрескожной пункционной биопсии, операционное вмешательство, которого контролируется компьютерной системой, а его ход отображается на ее мониторе, отличающаяся тем, что робот-манипулятор содержит анестетик и антисептик, находящиеся под давлением, средство, служащее для проведения глубокой анестезии, и блок управления, с которым взаимодействуют сервоприводы, выполненные с возможностью механического управления указанного подвижного элемента и средства для выполнения чрескожной пункционной биопсии, выполненного в виде U-образной насадки, внутри которой расположены выводное сквозное отверстие для подачи анестетика и антисептика для поверхностной анестезии, направляющая игла для внутритканевой анестезии, направляющая игла для пункционной биопсии и блок механизмов управления указанными иглами, при этом упомянутая компьютерная система выполнена с возможностью получения и обработки КТ-срезов очагового образования, передающихся от компьютерной системы томографа, а также с возможностью осуществления разметки хода и последующего моделирования операционного малоинвазивного хирургического вмешательства.
2. Автоматическая роботизированная установка по п. 1, отличающаяся тем, что антисептик и анестетик помещены в аэрозольные баллоны.
3. Автоматическая роботизированная установка по п. 1, отличающаяся тем, что робот-манипулятор выполнен с возможностью закрепления его стационарно на полу или на потолке.
4. Автоматическая роботизированная установка по п. 1, отличающаяся тем, что робот-манипулятор выполнен с возможностью мобильного перемещения посредством оснащения его передвижными колесами.
5. Автоматическая роботизированная установка по п. 1, отличающаяся тем, что робот-манипулятор оснащен средством экстренной остановки, обеспечивающейся за счет нажатия кнопки мгновенного отключения.
6. Автоматическая роботизированная установка по п. 1, отличающаяся тем, что средство, служащее для проведения глубокой анестезии, выполнено в виде поршневого механизма с электрическим мотором.
7. Автоматическая роботизированная установка по п. 6, отличающаяся тем, что поршневой механизм помещен в цилиндрическую емкость.
8. Автоматическая роботизированная система по п. 1, отличающаяся тем, что подвижный элемент робота-манипулятора выполнен в виде активного многозвенного привода.
9. Способ проведения малоинвазивного хирургического вмешательства с использованием автоматической роботизированной установки по п. 1, включающий оценку локализации и параметров очагового образования, а также выбор участка пункции с помощью компьютерной томографии и выполнение чрескожной пункционной биопсии очагового образования с помощью биопсийной иглы, отличающийся тем, что изготовленные компьютерной системой томографа КТ-срезы очагового образования направляются в компьютерную систему автоматической роботизированной установки, осуществляющей малоинвазивное хирургическое вмешательство, посредством которой выполняются разметка хода и моделирование пункционной биопсии, а полученные ею упомянутые КТ-срезы очагового образования в трехмерной проекции подвергаются компьютерному анализу в целях автоматизированного установления оптимальных параметров и условий проведения роботизированного операционного вмешательства, осуществляемого U-образной насадкой подвижного элемента робота-манипулятора, внутри которой помещены упомянутая биопсийная игла и блок механизмов для ее механического управления, по окончании определения упомянутых параметров и условий осуществляется касание упомянутой U-образной насадки участка кожи пациента, проводится поверхностная и внутритканевая анестезия указанного участка и последующее чрескожное движение пункционной иглы для взятия материала, обеспечивающиеся в соответствии с установленными ранее параметрами и условиями для проведения соответствующего операционного вмешательства, на всем протяжении которого томографом осуществляются его сканирование и проецирование его хода на монитор компьютерной системы.
10. Способ проведения малоинвазивного хирургического вмешательства по п. 9, отличающийся тем, что КТ-срезы очагового образования в трехмерной проекции подвергаются компьютерному анализу в целях автоматизированного установления виртуального участка соприкосновения U-образной насадки и поверхности тела пациента, заключающемуся в планировании и моделировании безопасного движения активного многозвенного привода к участку контакта, определяются точки входа и маршруты направляющей иглы для внутритканевой анестезии, этапы поверхностной и внутритканевой анестезии, а также участок и маршруты пункционной иглы для забора гистологического материала.
11. Способ проведения малоинвазивного хирургического вмешательства по п. 10, отличающийся тем, что точки входа направляющей иглы для внутритканевой анестезии и иглы для пункционной биопсии определяются путем выявления края воздух-кожа по плотности HU.
12. Способ проведения малоинвазивного хирургического вмешательства по п. 10, отличающийся тем, что маршруты иглы для внутритканевой анестезии определяются по разнице плотностей кожи и слоев мышечной ткани.
13. Способ проведения малоинвазивного хирургического вмешательства по п. 12, отличающийся тем, что маршруты игл определяются с возможностью коррекции хода процедуры оператором.
14. Способ проведения малоинвазивного хирургического вмешательства по п. 10, отличающийся тем, что маршруты иглы для пункционной биопсии определяются с учетом возможности минимального воздействия на сосуды и критичные органы пациента.
15. Способ проведения малоинвазивного хирургического вмешательства по п. 14, отличающийся тем, что минимальное воздействие на сосуды и критичные органы пациента обеспечиваются с помощью проведения КТ с в/в контрастированием или проведения МРТ.
16. Способ проведения малоинвазивного хирургического вмешательства по п. 9, отличающийся тем, что для осуществления контроля дыхания пациента к роботу-манипулятору подключают средство контроля экскурсии грудной клетки, при этом на пациента вешается пояс, контролирующий изменение объема грудной клетки.
17. Способ проведения малоинвазивного хирургического вмешательства по п. 16, отличающийся тем, что на глаза пациента надевают медицинские очки, на которых отображаются данные о его дыхании во время сканирования и в реальном времени.
18. Способ проведения малоинвазивного хирургического вмешательства по п. 17, отличающийся тем, что пациент осуществляет вдох, равный по глубине вдоху во время сканирования.
19. Способ проведения малоинвазивного хирургического вмешательства по п. 9, отличающийся тем, что перед установлением параметров и условий проведения операционного вмешательства производят калибровку робота-манипулятора по координатам томографа.
20. Способ проведения малоинвазивного хирургического вмешательства по п. 19, отличающийся тем, что калибровка выполняется при помощи U-образной насадки, которая при помощи активного многозвенного привода робота-манипулятора двигается до положения совмещения своих меток с метками лазеров томографа, далее робот-манипулятор фиксируется стопорами на месте.
21. Устройство для выполнения чрескожной пункционной биопсии, содержащее биопсийную иглу, установленную внутри полой U-образной в продольном сечении насадки с открытым основанием, фиксирующимся на кожном участке пациента, отличающееся тем, что насадка изготовлена с переменной шириной относительно ее высоты, при этом ширина ее основания увеличивается в сторону указанного кожного участка пациента, внутри насадки расположены выводное сквозное отверстие для подачи анестетика и антисептика для поверхностной анестезии, направляющая игла для внутритканевой анестезии, а также блок механизмов для управления подачи поверхностной анестезии и всеми упомянутыми иглами, обеспечиваемого в соответствии с заранее автоматически установленными оптимальными параметрами и условиями для проведения роботизированной чрескожной пункционной биопсии.
| СПОСОБ ВЫПОЛНЕНИЯ ЧРЕСКОЖНОЙ ПУНКЦИОННОЙ БИОПСИИ | 2007 |
|
RU2362490C1 |
| US 6785572 B2, 31.08.2004 | |||
| US 2009112119 A1, 30.04.2009 | |||
| US 2008310698 A1, 18.12.2008 | |||
| US 6064904 A, 16.05.2000 | |||
| US 4378810 A1, 05.04.1983. | |||

