Настоящее изобретение, в общем, относится к интервенционным процедурам для диагностики и/или лечения тела человека или животного, которые могут включать в себя создание разреза или отверстия для получения доступа к внутренней части тела, или получения доступа к полости тела без хирургического вмешательства в тело, или применение электромагнитного излучения (например, рентгеновских лучей, лазеров, гамма лучей и ультрафиолетового света) к телу. Настоящее изобретение конкретно относится к интраоперационному мониторингу качества калибровки системы отслеживания для интервенционного инструмента в течение интервенционной процедуры.
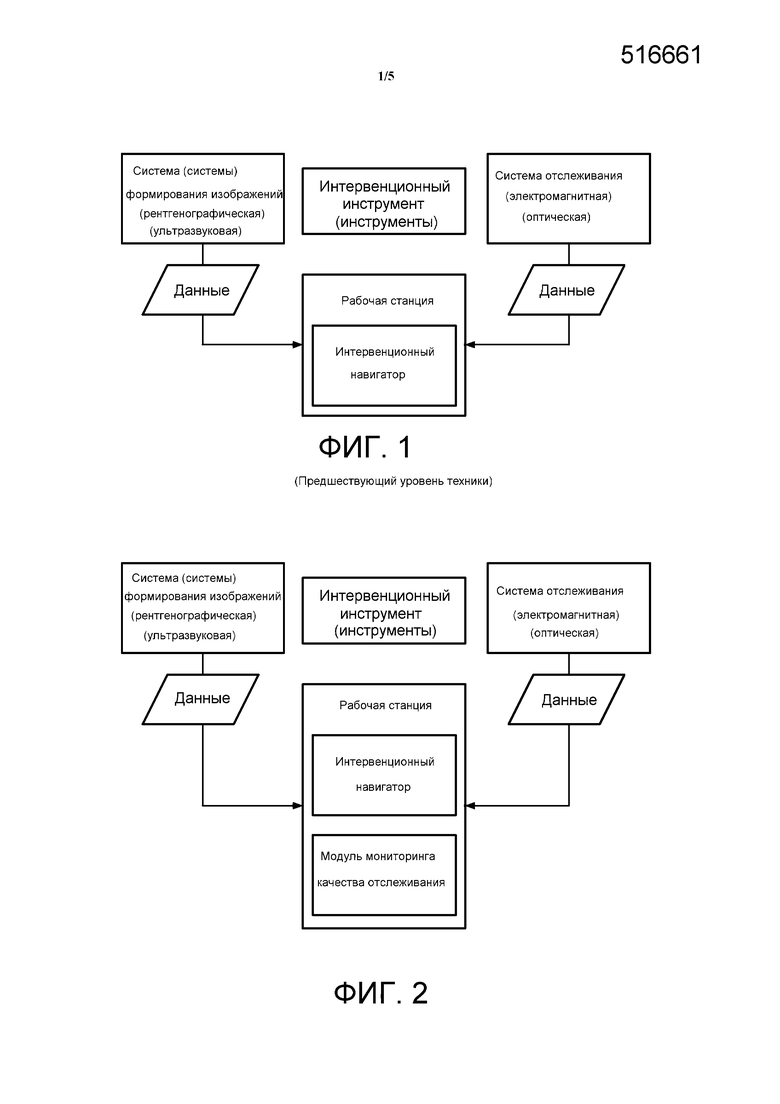
Фиг. 1 иллюстрирует известную интервенционную систему, применяющую один или более интервенционных инструментов 20, одну или более систем 30 формирования изображений, систему 40 отслеживания и рабочую станцию 50.
Каждый интервенционный инструмент 20 может быть любым типом инструмента, приспособления, устройства, гаджета и т.д., структурно сконфигурированным с возможностью выполнения конкретного действия в течение интервенционной процедуры. Примеры интервенционного инструмента 20 включают в себя, но не ограничены этим, эндоскопы, катетеры и ультразвуковые ("US") зонды.
Каждая система 30 формирования изображений может быть любым типом системы, структурно сконфигурированной с возможностью генерирования изображений анатомической области тела в течение интервенционной процедуры. Примеры системы 30 формирования изображений включают в себя, но не ограничены этим, рентгенографические системы и US системы.
Система 40 отслеживания может быть любым типом системы, структурно сконфигурированной с возможностью отслеживания перемещения (перемещений) интервенционного инструмента (инструментов) 20 внутри пространственной системы отсчета в течение интервенционной процедуры. Примеры системы 40 отслеживания включают в себя, но не ограничены этим, электромагнитные ("EM") системы отслеживания и оптические системы отслеживания.
Рабочая станция 50 может состоять из любого типа скомпонованного оборудования, структурно сконфигурированного с возможностью обработки данных 31 изображения от системы (систем) 30 формирования изображений и данных 41 отслеживания от системы 40 отслеживания, чтобы визуализировать положения интервенционного инструмента (инструментов) 20 внутри пространственной системы отсчета по отношению к совмещенным изображениям анатомической области тела в течение интервенционной процедуры. Примеры рабочей станции 50 включают в себя, но не ограничены этим, компьютер, имеющий (1) приложение 51 интервенционного навигатора для обработки данных 31 изображения и данных 41 отслеживания, чтобы отображать положения интервенционного инструмента (инструментов) 20 внутри пространственной системы отсчета по отношению к совмещенным изображениям анатомической области тела, и (2) графический пользовательский интерфейс ("GUI") (не показан) для взаимодействия с приложением 51 интервенционного навигатора.
Особенно важной для любой интервенционной процедуры является калибровка системы 40 отслеживания. Например, EM система отслеживания обычно применяет один или более источников магнитного поля для определения пространственной системы отсчета и один или более магнитных датчиков для измерения полей, производимых посредством источников магнитного поля, тем самым используются измерения, чтобы определять положение (положения) интервенционного инструмента (инструментов) 20 внутри пространственной системы отсчета. Этот способ полагается на точное предварительное знание относительных положений источников и пространственных форм их магнитных полей и относительных положений и чувствительностей магнитных датчиков. Так как не является возможным изготавливать магнитные источники и магнитные датчики с идеальными характеристиками, чисто теоретические вычисления таких характеристик скорей всего будут ошибочными, и, следовательно, они должны определяться из измерений калибровки до или в течение интервенционной процедуры. Калибровка EM системы отслеживания обеспечивает точное совмещение изображений, сгенерированных посредством системы (систем) 30 формирования изображений (например, рентгенографической системы формирования изображений и/или US системы формирования изображений).
Однако совмещение изображений, сгенерированных посредством системы (систем) 30 формирования изображений, может несмотря ни на что стать ошибочным в течение интервенционной процедуры вследствие многообразия причин, включающих в себя, но не ограниченных этим, ошибки калибровки, неработоспособные или неисправно работающие магнитные источники/датчики, электромагнитное искажение или интерференцию, движение стола пациента и/или изгибание стола пациента. Чтобы решать эту потенциальную проблему калибровки, настоящее изобретение обеспечивает модуль 52 мониторинга качества отслеживания для рабочей станции 50, как показано на фиг. 2, для мониторинга качества отслеживания системы 40 калиброванного отслеживания. Конкретно, модуль 52 мониторинга качества отслеживания осуществляет способы для определения ошибки (ошибок) определения местоположения интервенционного инструмента (инструментов) 20 внутри пространственной системы отсчета, определенной посредством системы 40 отслеживания, и для обеспечения оповещений и/или коррекций такой ошибки (ошибок) определения местоположения.
Одной формой настоящего изобретения является интервенционная система, применяющая интервенционный инструмент, имеющий точку отслеживания, систему формирования изображений, систему отслеживания и модуль мониторинга качества отслеживания. В работе система формирования изображений выполнена с возможностью, чтобы генерировать одно или более изображений части или всего интервенционного инструмента по отношению к анатомической области тела. Система отслеживания отслеживает любые перемещения интервенционного инструмента и системы формирования изображений внутри пространственной системы отсчета по отношению к анатомической области тела, при этом система отслеживания откалибрована для интервенционного инструмента и системы формирования изображений. Модуль мониторинга качества отслеживания осуществляет мониторинг качества отслеживания систем отслеживания как функцию ошибки калиброванного определения местоположения для каждого изображения между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в изображении.
Второй формой настоящего изобретения является интервенционная рабочая станция, применяющая интервенционный навигатор и модуль мониторинга качества отслеживания. В работе интервенционный навигатор визуализирует положения интервенционного инструмента внутри пространственной системы отсчета по отношению к одному или более совмещенным изображениям анатомической области тела в течение интервенционной процедуры. Модуль мониторинга качества отслеживания осуществляет мониторинг качества отслеживания совмещенных изображений как функцию ошибки калиброванного определения местоположения для каждого совмещенного изображения между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в совмещенном изображении.
Третьей формой настоящего изобретения является интервенционный способ, включающий в себя навигацию интервенционного инструмента по отношению к анатомической области тела, при этом интервенционный инструмент имеет точку отслеживания, операцию системы формирования изображений для генерирования, по меньшей мере, одного изображения, по меньшей мере, части интервенционного инструмента по отношению к анатомической области тела, операцию системы отслеживания для отслеживания любых перемещений интервенционного инструмента и системы формирования изображений внутри пространственной системы отсчета по отношению к анатомической области тела, при этом система отслеживания откалибрована для интервенционного инструмента и системы формирования изображений и мониторинг качества отслеживания систем отслеживания как функцию ошибки калиброванного определения местоположения для каждого изображения между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в изображении.
Вышеупомянутые формы и другие формы настоящего изобретения, так же как различные признаки и преимущества настоящего изобретения, далее станут ясными из последующего подробного описания различных вариантов осуществления настоящего изобретения, взятых в соединении с сопровождающими чертежами. Подробное описание и чертежи являются всего лишь иллюстрирующими настоящее изобретение, нежели ограничивающими, при этом объем настоящего изобретения определяется прилагаемой формулой изобретения и ее эквивалентами.
Фиг. 1 иллюстрирует один иллюстративный вариант осуществления интервенционной системы, как известно в данной области техники.
Фиг. 2 иллюстрирует один иллюстративный вариант осуществления интервенционной системы в соответствии с настоящим изобретением.
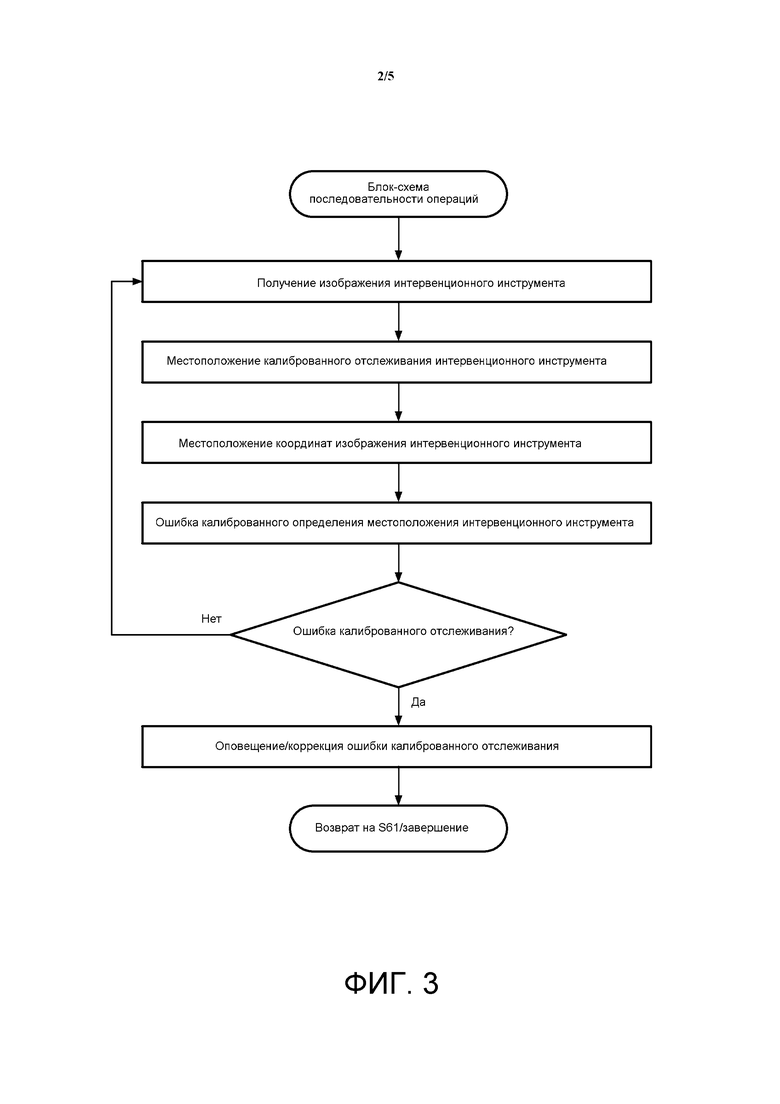
Фиг. 3 иллюстрирует блок-схему последовательности операций, представляющую один иллюстративный вариант осуществления способа мониторинга качества отслеживания в соответствии с настоящим изобретением.
Фиг. 4 иллюстрирует первый иллюстративный интервенционный вариант осуществления блок-схемы последовательности операций, показанной на фиг. 3.
Фиг. 5 иллюстрирует иллюстративный мониторинг качества отслеживания интервенционного варианта осуществления, показанного на фиг. 4.
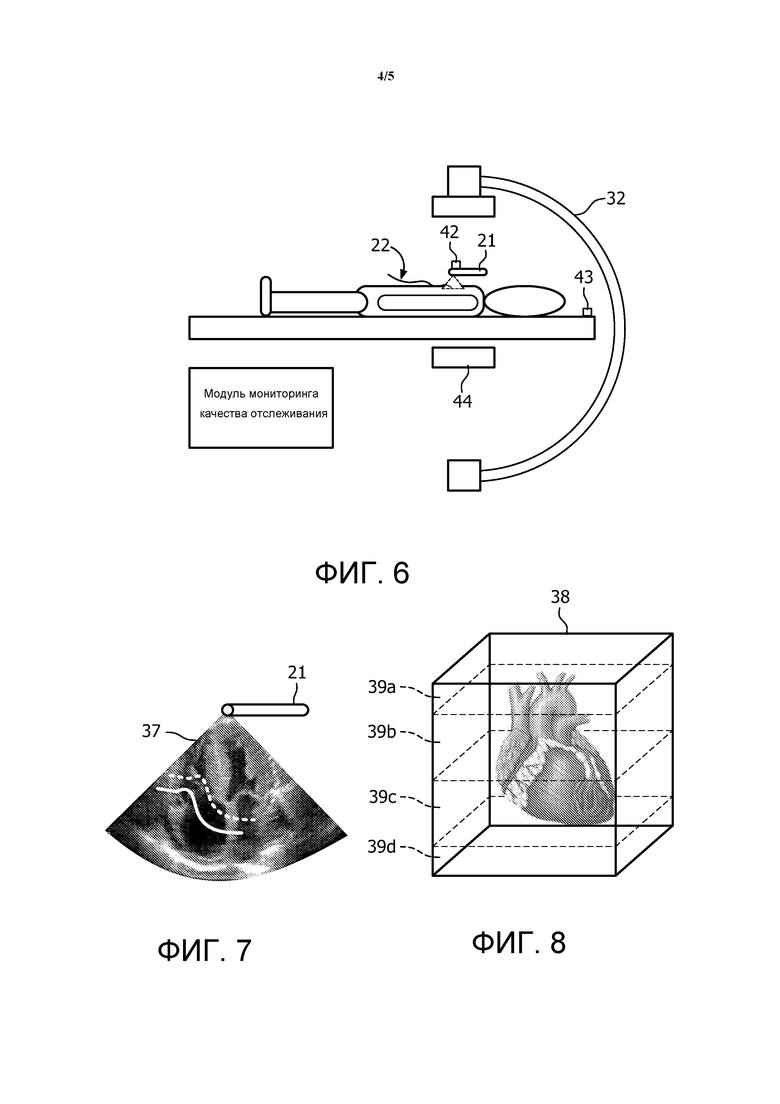
Фиг. 6 иллюстрирует второй иллюстративный интервенционный вариант осуществления блок-схемы последовательности операций, показанной на фиг. 3.
Фиг. 7 и 8 иллюстрируют иллюстративный мониторинг качества отслеживания интервенционного варианта осуществления, показанного на фиг. 6.
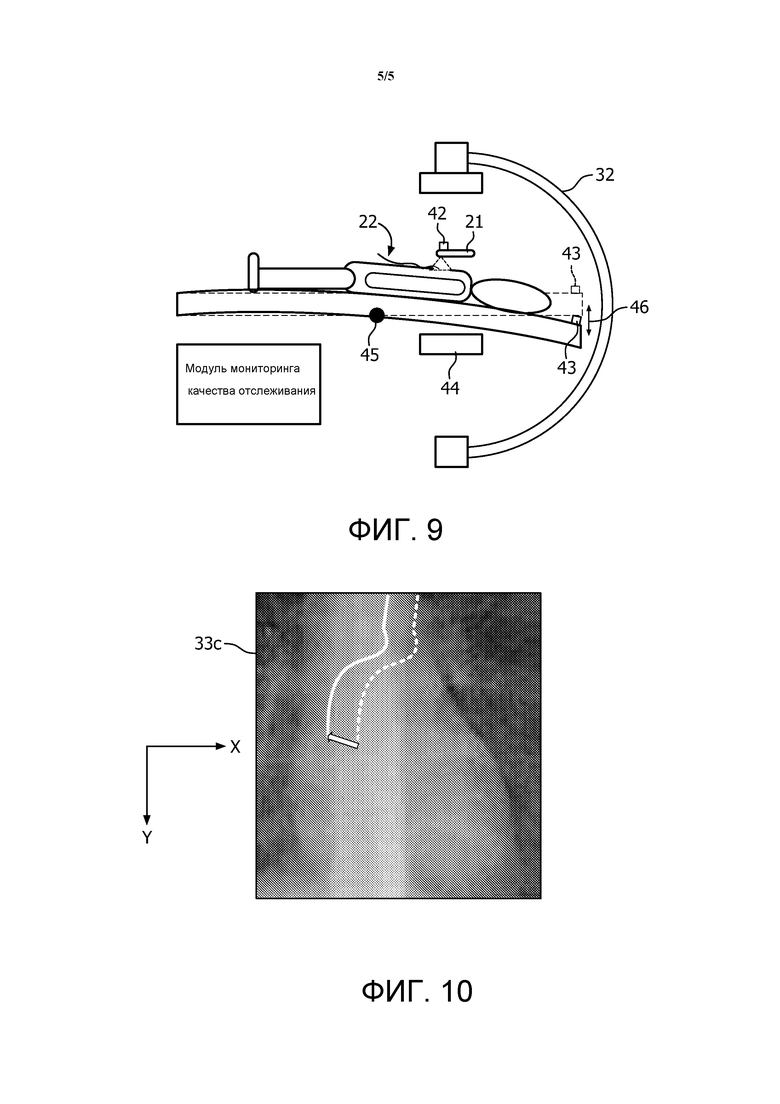
Фиг. 9 иллюстрирует третий иллюстративный интервенционный вариант осуществления блок-схемы последовательности операций, показанной на фиг. 3.
Фиг. 10 иллюстрирует иллюстративный мониторинг качества отслеживания интервенционного варианта осуществления, показанного на фиг. 9.
Как ранее упоминалось в данном документе, модуль 52 мониторинга качества отслеживания, как показано на фиг. 2, осуществляет способы для определения ошибки (ошибок) определения местоположения интервенционного инструмента (инструментов) 20 внутри пространственной системы отсчета, определенной посредством системы 40 отслеживания, и для обеспечения оповещений и/или коррекций такой ошибки (ошибок) определения местоположения. С этой целью модуль 52 мониторинга качества отслеживания выполняет блок-схему 60 последовательности операций, показанную на фиг. 3, которая представляет способы мониторинга качества отслеживания настоящего изобретения.
В общем, этап S61 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания получает изображение части или всего интервенционного инструмента 20 по отношению к соответствующей анатомической области тела (например, рентгеновское изображение US зонда, сканирующего анатомическую область тела, и US изображение анатомической области тела).
Этап S62 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания идентифицирует местоположение калиброванного отслеживания точки отслеживания интервенционного инструмента 20 внутри пространственной системы отсчета, как отслеживается посредством системы 40 отслеживания (например, местоположение калиброванного отслеживания наконечника катетера или головки US зонда внутри пространственной системы отсчета).
Этап S63 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания идентифицирует местоположение координат изображения точки отслеживания интервенционного инструмента 20 внутри полученного изображения (например, местоположение координат изображения наконечника катетера или головки US зонда внутри полученного изображения). В одном варианте осуществления идентифицированное местоположение координат изображения интервенционного инструмента 20 выводится из известных технологий сегментирования изображений.
Этап S64 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет ошибку калиброванного определения местоположения точки отслеживания интервенционного инструмента 20 между местоположением калиброванного отслеживания интервенционного инструмента 20 внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания интервенционного инструмента 20 внутри полученного изображения. В одном варианте осуществления ошибка калиброванного определения местоположения интервенционного инструмента 20 является пространственной разностью в одном или более измерениях пространственной системы отсчета между местоположением калиброванного отслеживания точки отслеживания интервенционного инструмента 20 внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания интервенционного инструмента 20 внутри полученного изображения.
Этап S65 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания определяет то, представляет ли ошибка калиброванного определения местоположения интервенционного инструмента 20 ошибку калиброванного отслеживания интервенционного инструмента 20. В одном варианте осуществления модуль мониторинга качества отслеживания определяет ошибку калиброванного определения местоположения интервенционного инструмента 20, представляет ошибку калиброванного отслеживания интервенционного инструмента 20 в ответ на ошибку калиброванного определения местоположения, равную и/или превосходящую порог ошибки калибровки.
Если модуль 52 мониторинга качества отслеживания определяет, что ошибка калиброванного определения местоположения интервенционного инструмента 20 не представляет ошибку калиброванного отслеживания интервенционного инструмента 20, то модуль 52 мониторинга качества отслеживания возвращается на этап S61, чтобы получить любое последующее изображение интервенционного инструмента 20 по отношению к соответствующей анатомической области тела.
Если модуль 52 мониторинга качества отслеживания определяет, что ошибка калиброванного определения местоположения интервенционного инструмента 20 представляет ошибку калиброванного отслеживания интервенционного инструмента 20, то модуль 52 мониторинга качества отслеживания переходит на этап S66 блок-схемы 60 последовательности операций, чтобы обеспечивать оповещение об ошибке калиброванного отслеживания и/или чтобы корректировать ошибку калиброванного отслеживания. На практике любое оповещение об ошибке калиброванного отслеживания может быть визуальным и/или аудиооповещением, и может происходить после обнаружения множества ошибок калиброванного отслеживания. Также на практике любая коррекция ошибки калиброванного отслеживания может быть автоматической или полуавтоматической и может происходить после обнаружения множества ошибок калиброванного отслеживания.
При завершении этапа S66 модуль 52 мониторинга качества отслеживания может возвращаться на этап S61, чтобы получать любое последующее изображение интервенционного инструмента 20 по отношению к соответствующей анатомической области тела или завершать блок-схему 60 последовательности операций.
На практике модуль 52 мониторинга качества отслеживания может использоваться для любого типа интервенционной процедуры в качестве меры качества калибровки системы 40 отслеживания. Однако чтобы обеспечивать понимание способов мониторинга качества отслеживания настоящего изобретения, исполнение блок-схемы 60 последовательности операций посредством модуля 52 мониторинга качества отслеживания теперь будет описываться в контексте (1) рентгеновского/ультразвукового слияния в сердечной интервенционной процедуре, (2) управляемой ультразвуком сердечной интервенционной процедуры и (3) рентгеновской/электромагнитной калибровки для сердечной интервенционной процедуры.
Рентгеновское/ультразвуковое слияние в сердечной интервенционной процедуре Постоянно исследуются способы для улучшенной визуализации сердца для улучшенных сердечных вмешательств при рентгенографическом управлении. Одним примером для усовершенствованной визуализации мягкой ткани является слияние двумерного ("2D")/трехмерного ("3D) US формирования изображения реального времени с потоковым рентгеновским формированием изображения с использованием EM отслеживания. Например, фиг. 4 иллюстрирует интервенционную процедуру, включающую в себя совмещение US зонда 21 (например, транс-пищеводного зонда) и модуля 32 формирования рентгенографических изображений. EM датчик 42 прикрепляется к US зонду 21 и предварительно калибруется для 2D/3D US изображения, и EM датчик 43 прикрепляется к столу пациента и предварительно калибруется для модуля 32 формирования рентгенографических изображений, посредством чего поток реального времени рентгеновских изображений постоянно совмещается с US изображениям. EM источником 44 управляют в целях отслеживания EM датчиков 42 и 43 внутри пространственной системы отсчета, определенной посредством EM источника 44. Проблемой является то, что US/рентгенографическое совмещение может стать ошибочным вследствие многообразия причин, которые дают результатом уменьшение в точности и надежности интервенционной процедуры.
Чтобы решать проблему потенциального ошибочного US/рентгенографического совмещения, модуль 52 мониторинга качества отслеживания (фиг. 2) непрерывно исполняется на заднем плане и осуществляет мониторинг состояния совмещения по мере того, как процедура осуществляется в нормальном режиме. В общем, каждый раз, когда рентгеновское изображение снимается клиническим врачом как часть регулярного клинического протокола, модуль 52 мониторинга качества отслеживания идентифицирует местоположение координат изображения головки US зонда 21 на рентгеновском изображении и сравнивает местоположение координат изображения головки US зонда 21 с ожидаемым местоположением калиброванного отслеживания наконечника US зонда 21 на рентгеновском изображении посредством текущего US/рентгенографического совмещения. Модуль 52 мониторинга качества отслеживания непрерывно вычисляет любую ошибку калиброванного определения местоположения головки US зонда 21, делает запись в журнале ошибок калиброванного определения местоположения и оповещает клинического врача, если значительное отклонение ошибки обнаруживается в ошибках калиброванного определения местоположения (т.е. ошибка калиброванного определения местоположения равняется и/или превосходит порог ошибки калибровки).
В контексте блок-схемы 30 последовательности операций (фиг. 3) этап S61 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания получает и сохраняет каждое рентгеновское изображение сердечной области пациента. Альтернативно модуль 52 мониторинга качества отслеживания получает и сохраняет каждое n-е рентгеновское изображение, взятое из сердечной области пациента, где n⋅2.
После получения и сохранения рентгеновского изображения этап S62 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет местоположение калиброванного отслеживания головки US зонда 21 внутри рентгеновского изображения с использованием известной матрицы US/рентгенографического совмещения и этап S63 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет местоположение координат изображения головки US зонда 21 внутри рентгеновского изображения с использованием известных алгоритмов сегментирования для сегментирования головки US зонда 21 или для извлечения имеющего приблизительно шесть (6) степеней свободы ("DOF") расположения US зонда 21. Например, фиг. 5A показывает местоположение 34a калиброванного отслеживания и местоположение 35 координат изображения головки US зонда 21 внутри рентгеновского изображения 33a, и фиг. 5B показывает местоположение 34b калиброванного отслеживания и местоположение 35 координат изображения головки US зонда 21 внутри рентгеновского изображения 33b. Следует отметить, что оставшиеся части рентгеновских изображений 33 пропущены, чтобы ясно показать местоположения 34 и 35.
Этап S64 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания сравнивает местоположение калиброванного отслеживания головки US зонда 21 внутри рентгеновского изображения с местоположением координат изображения головки US зонда 21 внутри рентгеновского изображения, чтобы определять и записывать в журнал калиброванное отслеживание между упомянутыми двумя (2) местоположениями. Сравнение показывает приемлемое совмещение US/рентгенографического изображения в течение этапа S65 блок-схемы 60 последовательности операций, если калиброванное отслеживание меньше чем или равно максимальному допустимому порогу ошибки калибровки, окружающему местоположение координат изображения. Например, фиг. 5A показывает местоположение 34a калиброванного отслеживания, соответствующее местоположению 35 координат изображения внутри порога 36 калиброванного отслеживания, и, таким образом, приемлемое совмещение US/рентгенографического изображения определяется посредством модуля 52 мониторинга качества отслеживания. Если сравнение показывает приемлемое совмещение US/рентгенографического изображения, то модуль 52 мониторинга качества отслеживания возвращается на этап S61, чтобы получать и сохранять другое рентгеновское изображение.
Сравнение показывает неприемлемое совмещение US/рентгенографического изображения в течение этапа S65 блок-схемы 60 последовательности операций, если калиброванное отслеживание превосходит максимальный допустимый порог калиброванного отслеживания, окружающий местоположение координат изображения. Например, фиг. 5B показывает местоположение 34b калиброванного отслеживания, которое находится вне порога 36 калиброванного отслеживания и, таким образом, неприемлемое совмещение US/рентгенографического изображения определяется посредством модуля 52 мониторинга качества отслеживания. Если сравнение показывает неприемлемое совмещение US/рентгенографического изображения, то модуль 52 мониторинга качества отслеживания переходит на этап S66 блок-схемы 60 последовательности операций, чтобы обеспечивать оповещение отслеживания и/или чтобы осуществлять коррекцию совмещения US/рентгенографического изображения, по необходимости.
Для оповещения отслеживания модуль 52 мониторинга качества отслеживания может оповещать клинического врача, чтобы он просмотрел журнал ошибок калиброванного отслеживания, чтобы решить, продолжать ли или нет интервенционную процедуру и/или запросить коррекцию неприемлемого совмещения.
Для автоматической или полуавтоматической коррекции совмещения модуль 52 мониторинга качества отслеживания может оптимизировать соответствующую матрицу совмещения, чтобы корректно прийти в состояние соответствия. Такая оптимизация должна выполняться над множеством рентгеновских изображений для устойчивых результатов и будут нужны рентгеновские изображения с двух разных углов. Более конкретно, если множество рентгеновских изображений получаются, по мере того и когда они захватываются, то все из рентгеновских изображений могут использоваться вместе, чтобы делать статистически сильную оценку. Также отметим, что эти рентгеновские изображения могут захватываться как часть нормального клинического рабочего потока, или намеренно захватываться для цели коррекции.
Можно наблюдать, что вследствие природы проективной геометрии неопределенность ошибки калиброванного отслеживания в направлении глубины конкретного рентгеновского изображения будет намного больше, чем в направлении, параллельном к рентгеновскому изображению. Однако обработка второго наклонного рентгеновского изображения может устранять эту проблему.
Дополнительно, накопленная информация ошибок может использоваться, чтобы разбивать ошибку на две: первую ошибку вследствие изменений в совмещении и вторую ошибку вследствие случайных событий (например, EM искажение и ошибки отслеживания C-штатива).
Ультразвуковое управление в сердечной интервенционной процедуре. Другим примером для усовершенствованной визуализации мягкой ткани является слияние 2D/3D US формированием изображений реального времени с потоковым рентгеновским формированием изображений вместе с отслеживаемым катетером с использованием EM отслеживания. Например, фиг. 6 иллюстрирует интервенционную процедуру из фиг. 4 с добавлением отслеживаемого катетера 22. Снова, проблемой является то, что US/рентгенографическое совмещение может стать ошибочным вследствие многообразия причин, которые дают результатом уменьшение в точности и надежности интервенционной процедуры.
Чтобы решать проблему потенциального ошибочного US/рентгенографического совмещения, модуль 52 мониторинга качества отслеживания (фиг. 2) непрерывно исполняется на заднем плане и обновляет ошибки EM отслеживания внутри бьющегося сердца. В общем, модуль 52 мониторинга качества отслеживания использует сегментирование реального времени наконечника катетера 22, как известно в данной области техники, и соответствующее EM отслеживаемое положение наконечника катетера 22. Как только достаточное количество таких точек данных собирается, модуль 52 мониторинга качества отслеживания исполняет алгоритм, чтобы определять наиболее вероятное распределение ошибок, чтобы соответствовать этим данным. Эта карта ошибок реального времени внутри сердца может отображаться для клинического врача. Дополнительно, карта может использоваться для автоматического уведомления клинического врача, когда ошибка выходит за границу. Это значительно увеличивает степень достоверности и точность системы.
В контексте блок-схемы 60 последовательности операций (фиг.3) этап S61 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания получает и сохраняет каждое US изображение сердечной области пациента. Альтернативно, модуль 52 мониторинга качества отслеживания получает и сохраняет каждое n-е US изображение, взятое из сердечной области пациента, где n⋅2.
После получения и сохранения US изображения этап S62 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет местоположение калиброванного отслеживания наконечника катетера 22 внутри US изображения с использованием известной матрицы US/рентгенографического совмещения, и этап S63 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет местоположение координат изображения наконечника катетера 22 внутри US изображения с использованием известных алгоритмов сегментирования для сегментирования наконечника катетера 22. Например, фиг. 7 показывает местоположение калиброванного отслеживания катетера 22, представленное посредством пунктирной белой линии внутри US изображения 37, и местоположение 35 координат изображения катетера 22, представленное посредством сплошной белой линии внутри US изображения 37.
На практике не все US изображения будут иметь достаточное качество, чтобы обеспечивать возможность для сегментирования. Обычно US изображения передаются посредством потоковой передачи при 30 объем/секунду. Как таковое, хорошее сегментирование может достигаться каждые 10-1000 объемов US изображений.
Этап S64 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания сравнивает местоположение калиброванного отслеживания наконечника катетера 22 внутри US изображения с местоположением координат изображения наконечника катетера 22 внутри US изображения, чтобы определять и регистрировать калиброванное отслеживание между упомянутыми двумя (2) местоположениями.
В базовом варианте осуществления этапа S64, сравнение показывает приемлемое совмещение в течение этапа S65 блок-схемы 60 последовательности операций, если ошибка калиброванного определения местоположения меньше, чем или равна максимальному допустимому порогу калиброванного отслеживания, окружающему местоположение координат изображения. Если сравнение показывает приемлемое совмещение, то модуль 52 мониторинга качества отслеживания возвращается на этап S61 блок-схемы 60 последовательности операций, чтобы получать и сохранять другое US изображение.
Сравнение показывает неприемлемое совмещение в течение этапа S65 блок-схемы 60 последовательности операций, если ошибка калиброванного определения местоположения превосходит максимальный допустимый порог калиброванного отслеживания, окружающий местоположение координат изображения. Если сравнение показывает неприемлемое совмещение, то модуль 52 мониторинга качества отслеживания переходится на этап S66 блок-схемы 60 последовательности операций, чтобы обеспечивать оповещение отслеживания и/или чтобы осуществлять коррекцию совмещения по необходимости.
Вследствие неопределенностей в US сегментировании базовый вариант осуществления этапа S64 может не обеспечивать хорошую оценку ошибки EM отслеживания в местоположении. Дополнительно, ошибки в EM отслеживании катетера 22 будут смешиваться с ошибками в US-EM калибровке. Как таковая, реализация построения карты этапа S64 охватывает то, что модуль 52 мониторинга качества отслеживания собирает множество наборов данных ошибок для создания статистически релевантной карты. Конкретно, для всех захваченных и релевантных объемов EM положение, сегментированное положение и значения степени достоверности сегментирования обеспечиваются в известный алгоритм. Алгоритм исполняет способ статистической оптимизации, чтобы вычислять 3D карту распределения EM ошибок внутри 3D объема, такую как, например, 3D карта 38, показанная на фиг. 8, имеющая разные зоны 39a-39d ошибок. Алгоритм осуществляет интерполяцию, чтобы делать это распределение ошибок гладким внутри 3D карты и выводит любые систематические ошибки, которые он находит в US-EM калибровке. Когда алгоритм вычисляет такое смещение, алгоритм также измеряет степень достоверности такого смещения.
Дополнительно, алгоритм может использовать для ʹинициализацииʹ предварительно вычисленные карты EM ошибок из предыдущих экспериментов. Тем более, так как вычисление карт ошибок точно не обусловлено, вероятностная оценка значительно улучшится с картой ошибок, которую система ожидает. Эти предварительно вычисленные карты также могут давать качественную информацию, такую как изотропное (равный/неравный) распределение ошибок в различных измерениях.
Реализация построения карты этапа S64 также может включать в себя данные формирования изображения от модуля 32 формирования рентгенографических изображений. Проблема, однако, состоит в том, чтобы объединять их корректно. Например, неопределенности сегментирования в рентгеновском изображении являются вероятно низкими в плоскости изображения. Однако неопределенность в глубине является неизвестной/более высокой. Вероятностный подход помогает значительно улучшить эту оценку. Отметим, что если получается множество рентгеновских изображений, по мере того и когда они захватываются, они могут все использоваться вместе, чтобы обеспечивать статистически сильную оценку. Также отметим, что эти рентгеновские изображения могут захватываться как часть нормального клинического рабочего потока или намеренно захватываться для цели коррекции.
С использованием этой карты ошибок в течение этапа S65 модуль 52 мониторинга качества отслеживания может автоматически делать вывод в отношении точности EM отслеживания катетера 22 и сохранять это значение в журнале. Если ошибка калиброванного определения местоположения меньше чем или равна порогу ошибки калибровки, модуль 52 мониторинга качества отслеживания возвращается на этап S61, чтобы получать и сохранять другое US изображение и/или рентгеновское изображение. Если ошибка калиброванного определения местоположения превосходит порог ошибки калибровки, модуль 52 мониторинга качества отслеживания переходит на этап S66 блок-схемы 60 последовательности операций, чтобы обеспечивать оповещение отслеживания и/или чтобы осуществлять коррекцию совмещения, по необходимости.
Для блок-схемы 60 последовательности операций, как только одна конкретная карта ошибок вычисляется, модуль 52 мониторинга качества отслеживания обновляет карту ошибок по мере того, как каждое новое US изображение получается и сохраняется. По мере того как новая точка данных (EM положение, сегментирование изображения, и степень достоверности) становится доступной, карта ошибок обновляется на лету посредством модуля 52 мониторинга качества отслеживания. Если новые обновления карты являются неожиданными и несовместимыми, для клинического врача может обеспечиваться предупреждение.
Для оповещения отслеживания из этапа S66 модуль 52 мониторинга качества отслеживания может оповещать клинического врача, чтобы он просмотрел журнал отслеживаний ошибок калибровки, чтобы решить, продолжать ли или нет интервенционную процедуру и/или запросить коррекцию неприемлемого совмещения.
Для автоматической или полуавтоматической коррекции совмещения этапа S66 модуль 52 мониторинга качества отслеживания может оптимизировать соответствующую матрицу совмещения, чтобы прийти в корректное соответствие. Такая оптимизация должна выполняться над множеством US изображений (и/или рентгеновских изображений) для устойчивых результатов и будет нуждаться в US изображениях (и/или рентгеновских изображениях) с двух разных углов. Более конкретно, если получается множество US изображений (и/или рентгеновских изображений), по мере того и когда они захватываются, то все из US изображений (и/или рентгеновских изображений) используются вместе, чтобы делать статистически сильную оценку. Также отметим, что эти US изображения (и/или рентгеновские изображения) могут захватываться как часть нормального клинического рабочего потока, или намеренно захватываться для цели коррекции.
Рентгенографическое управление в сердечной интервенционной процедуре
В текущее время популярный способ состоит в том, чтобы накладывать виртуальное местоположение катетера на рентгеновское изображение с использованием EM отслеживания. Например, фиг. 9 показывает модуль 32 формирования рентгенографических изображений предварительно откалиброванный для EM системы отслеживания посредством прикрепления опорного датчика 43 к столу пациента. Эта рентгеновская/EM калибровка смещается с течением времени, уменьшая точность накладывания. Первичная причина состоит в изгибании стола (∼5-10 мм) вследствие различных весов пациентов. Например, фиг. 9 показывает увеличенное изгибание стола пациента со смещением 46 в вертикальном направлении и вращением относительно горизонтальной оси 45.
Чтобы решать проблему, связанную с этим смещением, модуль 52 мониторинга качества отслеживания осуществляет интраоперационный мониторинг и корректирует это совмещение посредством сравнения фактического рентгеновского изображения катетера 22 с изображением, оцененным по внутренней предварительной калибровке. В общем, модуль 52 мониторинга качества отслеживания непрерывно исполняется на заднем плане как оптимизация и осуществляет мониторинг состояния совмещения по мере того, как интервенционная процедура осуществляется в нормальном режиме. Каждый раз, когда рентгеновское изображение снимается клиническим врачом как часть регулярного клинического протокола, модуль 52 мониторинга качества отслеживания вычисляет изгибание стола и корректирует калибровку (если необходимо). Модуль 52 мониторинга качества отслеживания может вычислять как интраоперационную коррекцию, так и визуализировать ошибки от других случайных источников.
В контексте блок-схемы 60 последовательности операций (фиг. 3) этап S61 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания получает и сохраняет каждое рентгеновское изображение сердечной области пациента. Альтернативно, модуль 52 мониторинга качества отслеживания получает и сохраняет каждое n-е рентгеновское изображение, взятое из сердечной области пациента, где n⋅2.
После получения и сохранения рентгеновского изображения этап S62 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет местоположение калиброванного отслеживания наконечника катетера 22 внутри рентгеновского изображения с использованием известной матрицы EM/рентгенографического совмещения и этап S63 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания вычисляет местоположение координат изображения наконечника катетера 22 внутри рентгеновского изображения с использованием известных алгоритмов сегментирования для сегментирования наконечника катетера 22. Например, фиг. 10 показывает местоположение калиброванного отслеживания катетера 22, представленного посредством пунктирной белой линии внутри рентгеновского изображения 70, и местоположение 35 координат изображения катетера 22, представленного посредством сплошной белой линии внутри рентгеновского изображения 33c.
Этап S64 блок-схемы 60 последовательности операций охватывает то, что модуль 52 мониторинга качества отслеживания сравнивает местоположение калиброванного отслеживания наконечника катетера 22 внутри рентгеновского изображения с местоположением координат изображения наконечника катетера 22 внутри рентгеновского изображения, чтобы определять и записывать в журнал ошибку между упомянутыми двумя (2) местоположениями. Например, фиг. 10 показывает ошибку в форме белого вектора, направленного из местоположения калиброванного отслеживания в местоположение координат изображения.
Для этой ошибки X-ошибка зависит от вращения C-штатива, Y-ошибка зависит от изгибания стола пациента и оставшаяся ошибка является случайной. Движение стола может оцениваться из вектора ошибки и непрерывно уточняться в течение сердечной интервенционной процедуры.
Более конкретно, с использованием этой ошибки модуль 52 мониторинга качества отслеживания оптимизирует параметры стола в течение этапа S66. Также отметим, что вследствие конкретного изгибания стола обычное рентгеновское изображение в ориентации AP не испытывает настолько большую ошибку визуализации, как изображение в наклонной ориентации. Эта накопленная информация ошибок может использоваться, чтобы разбивать ошибку на две: ошибку вследствие изменений в калибровке и ошибку от случайных событий (как EM искажение и ошибки отслеживания C-штатива). Следовательно, модуль 52 мониторинга качества отслеживания корректирует систематические ошибки от калибровки и оценивает величину внешних ошибок (главным образом отслеживания). Эта ошибка отслеживания может быть представлена как остаточная ошибка, остающаяся в системе после того, как ошибка от обновленной калибровки вычитается.
Из приведенного описания фиг. 1-10 специалисты в данной области техники должны понимать многочисленные преимущества настоящего изобретения, включающие в себя, но не ограниченные этим, применение модуля мониторинга качества отслеживания настоящего изобретения к любому типу интервенционной процедуры, применяющей систему отслеживания.
На практике интервенционный навигатор 51 (фиг. 1 и 2) и модуль 52 мониторинга качества отслеживания (фиг. 2) могут быть модулями, состоящими из аппаратного обеспечения, программного обеспечения и/или встроенного программного обеспечения как должно быть принято во внимание специалистом в области техники настоящего изобретения. Дополнительно, модуль 52 мониторинга качества отслеживания может быть компонентом интервенционного навигатора 51.
Хотя настоящее изобретение было описано со ссылкой на иллюстративные аспекты, признаки и варианты осуществления, раскрытые системы и способы не ограничены такими иллюстративными аспектами, признаками и/или вариантами осуществления. Скорее, как должно быть ясно специалистам в данной области техники из описания, здесь представленного, раскрытые системы и способы допускают модификации, изменения и улучшения без отступления от сущности или объема настоящего изобретения. Соответственно, настоящее изобретение явно охватывает такие модификацию, изменения и улучшения в пределах его объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКИЙ ИНТЕРФЕЙС СЛЕЖЕНИЯ, ОБЕСПЕЧИВАЮЩИЙ ИНТЕРВЕНЦИОННУЮ ИНФОРМАЦИЮ | 2013 |
|
RU2635289C2 |
| СОВМЕЩЕНИЕ СИСТЕМ КООРДИНАТ | 2007 |
|
RU2445007C2 |
| АДАПТИВНОЕ ФОРМИРОВАНИЕ ИЗОБРАЖЕНИЙ И ОПТИМИЗАЦИЯ ЧАСТОТЫ КАДРОВ НА ОСНОВЕ РАСПОЗНАВАНИЯ ФОРМЫ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2726159C2 |
| КОМБИНАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ СИСТЕМ | 2010 |
|
RU2556783C2 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ ТОКОВОЙ ЛОКАЛИЗАЦИИ | 2009 |
|
RU2527152C2 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| КАЛИБРОВОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2013 |
|
RU2650037C2 |
| ИНТЕГРАЦИЯ ОПТОВОЛОКОННОГО ОПРЕДЕЛЕНИЯ ФОРМЫ В ИНТЕРВЕНЦИОННУЮ СРЕДУ | 2012 |
|
RU2594814C2 |
| ОПОЗНАВАНИЕ ХАРАКТЕРНЫХ ПРИЗНАКОВ ДИСТОРСИИ ДЛЯ КОМПЕНСАЦИИ, ОБНАРУЖЕНИЯ И КОРРЕКЦИИ ОШИБОК ПРИ ЭЛЕКТРОМАГНИТНОМ СЛЕЖЕНИИ | 2012 |
|
RU2641835C2 |
| ИНТЕГРАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ МОДАЛЬНОСТЕЙ | 2013 |
|
RU2676521C2 |

Изобретения относятся к медицинской технике, а именно к интервенционным системам. Интервенционная система содержит интервенционный инструмент, имеющий точку отслеживания, систему формирования изображений, систему отслеживания, при этом система отслеживания откалибрована для интервенционного инструмента и системы формирования изображений, система также содержит модуль мониторинга качества отслеживания, выполненный с возможностью мониторинга качества отслеживания системы отслеживания в зависимости от ошибки калиброванного определения местоположения для каждого изображения между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в изображении. Интервенционная рабочая станция содержит интервенционный навигатор и модуль мониторинга качества отслеживания. Использование изобретений позволяет увеличить точность и надежность интервенционной процедуры. 2 н. и 13 з.п. ф-лы, 10 ил.
1. Интервенционная система, содержащая:
интервенционный инструмент (20), имеющий точку отслеживания;
систему (30) формирования изображений, выполненную с возможностью генерирования по меньшей мере одного изображения, по меньшей мере, части интервенционного инструмента (20) по отношению к анатомической области тела;
систему (40) отслеживания, выполненную с возможностью отслеживания любых перемещений интервенционного инструмента (20) и системы (30) формирования изображений внутри пространственной системы отсчета по отношению к анатомической области тела, при этом система (40) отслеживания откалибрована для интервенционного инструмента (20) и системы (30) формирования изображений; и
модуль (52) мониторинга качества отслеживания, выполненный с возможностью мониторинга качества отслеживания системы (40) отслеживания в зависимости от ошибки калиброванного определения местоположения для каждого изображения между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в изображении.
2. Интервенционная система по п. 1, в которой каждая ошибка калиброванного определения местоположения является пространственной разностью в одном или более измерениях пространственной системы отсчета между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в изображении.
3. Интервенционная система по п. 1, в которой модуль (52) мониторинга качества отслеживания дополнительно выполнен с возможностью генерирования карты распределения ошибок калиброванного определения местоположения внутри пространственной системы отсчета относительно анатомической области тела.
4. Интервенционная система по п. 1, в которой модуль (52) мониторинга качества отслеживания дополнительно выполнен с возможностью обеспечения оповещения в ответ на по меньшей мере одну ошибку калиброванного определения местоположения, превосходящую порог ошибки калибровки.
5. Интервенционная система по п. 1, в которой модуль (52) мониторинга качества отслеживания дополнительно выполнен с возможностью корректировки калибровки системы (40) отслеживания для интервенционного инструмента (20) и системы (30) формирования изображений в ответ на по меньшей мере одну ошибку калиброванного определения местоположения, превосходящую порог ошибки калибровки.
6. Интервенционная система по п. 1, в которой интервенционный инструмент (20) является ультразвуковым зондом и точка отслеживания является головкой ультразвукового зонда.
7. Интервенционная система по п. 1, в которой интервенционный инструмент (20) является катетером и точка отслеживания является наконечником катетера.
8. Интервенционная система по п. 1, в которой система (30) формирования изображений является ультразвуковой системой (30) формирования изображений.
9. Интервенционная система по п. 1, в которой система (30) формирования изображений является рентгенографической системой (30) формирования изображений.
10. Интервенционная система по п. 1, в которой система (40) отслеживания является электромагнитной системой (40) отслеживания.
11. Интервенционная система по п. 1, в которой система (40) отслеживания является оптической системой (40) отслеживания.
12. Интервенционная рабочая станция, содержащая:
интервенционный навигатор (51), выполненный с возможностью визуализации положений интервенционного инструмента (20) внутри пространственной системы отсчета по отношению к по меньшей мере одному совмещенному изображению анатомической области тела в течение интервенционной процедуры; и
модуль (52) мониторинга качества отслеживания, выполненный с возможностью мониторинга качества отслеживания упомянутого по меньшей мере одного совмещенного изображения в зависимости от ошибки калиброванного определения местоположения для каждого совмещенного изображения между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в совмещенном изображении.
13. Интервенционная рабочая станция по п. 12, в которой каждая ошибка калиброванного определения местоположения является пространственной разностью в одном или более измерениях пространственной системы отсчета между местоположением калиброванного отслеживания точки отслеживания внутри пространственной системы отсчета и местоположением координат изображения точки отслеживания в изображении.
14. Интервенционная рабочая станция по п. 12, в которой модуль (52) мониторинга качества отслеживания дополнительно выполнен с возможностью генерирования карты распределения ошибок калиброванного определения местоположения внутри пространственной системы отсчета относительно анатомической области тела.
15. Интервенционная рабочая станция по п. 12, в которой модуль (52) мониторинга качества отслеживания дополнительно выполнен с возможностью по меньшей мере одного из обеспечения оповещения в ответ на по меньшей мере одну ошибку калиброванного определения местоположения, превосходящую порог ошибки калибровки, и корректировки калибровки системы (40) отслеживания для интервенционного инструмента (20) и системы (30) формирования изображений в ответ на по меньшей мере одну ошибку калиброванного определения местоположения, превосходящую порог ошибки калибровки.
| DE 102010020781 A1, 24.11.2011 | |||
| Способ лечения костного туберкулеза | 1951 |
|
SU101845A1 |
| US 2002035321 A1, 21.03.2002 | |||
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА ЭЛЕКТРОДАМИ ВНУТРИ ТЕЛА ПАЦИЕНТА И СПОСОБ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2422084C2 |

