Изобретение относится к авиационно-ракетной технике, в частности к системам управления вектором тяги (УВТ) двигателя летательного аппарата (ЛА).
Известен способ управления вектором тяги двигателя путем вдува газа или впрыска жидкости в сверхзвуковую часть сопла. Принцип создания управляющих усилий, следующий: при несимметричном вдуве газа в сверхзвуковую часть сопла, возникает боковая сила, имеющая две составляющие - реактивная сила вторичной струи и сила, образующаяся за счет перераспределения давления на стенке сопла в зоне возмущения, причиной которого является взаимодействие основного и вторичного потоков. В месте вдува вторичный газ образует струйное препятствие, в результате происходит отрыв пограничного слоя с образованием в газовом потоке сложной системы скачков уплотнения
Такое техническое решение реализовано в системах УВТ для двигателей на твердом топливе. Известны системы управления вектором тяги с вдувом газа в сверхзвуковую часть сопла (патенты США №3426972, 11.02.1969, №3296799, 10.01.1967), содержащие клапаны вдува, трубопроводы для подачи газа, источники газа. При этом система управления вектором тяги обеспечивает управление только по каналам тангажа и рыскания.
Также существует система управления вектором тяги жидкостного ракетного двигателя (ЖРД), обеспечивающая управление по крену при вдуве газа в сверхзвуковую часть сопла (патент США №3229461, 18.01.1966), содержащая коллектор, сопла вдува, трубопроводы подачи газа, клапаны вдува, клапаны подачи газа и систему управления их работой. При этом вдув газа осуществляется через сопла, имеющие одну наклонную и одну прямую стенки, такая геометрия создает нецентральную тягу, которая в сочетании с косым срезом, возникающим в зоне пересечения сопла вдува с внутренней поверхностью сопла двигателя и поперечной струей, прижимающей поток к насадку, создает момент сил относительно оси сопла, то есть обеспечивает управление по крену. Клапаны подачи газа обеспечивают дискретный режим работы управляющих сопел.
Основной недостаток в данном техническом решении - это невозможность управления по каналам тангажа и рыскания.
Наиболее близким аналогом к предлагаемому изобретению является система управления вектором тяги жидкостного ракетного двигателя, обеспечивающая управление по крену, тангажу и рысканию при вдуве газа в сверхзвуковую часть сопла (патент RU 2594844 С1, МПК F02K 9/82), состоящая из коллектора, трубопроводов и газодинамических органов управления. Система содержит 8 газодинамических органов управления, каждый из которых представляет собой клапан, через который подается газ в сопло. При этом клапаны располагаются парами равномерно на наружной поверхности сверхзвуковой части сопла в плоскости инжекции газа, перпендикулярной продольной оси сопла. Клапаны в двух парах симметричны плоскости тангажа, а в двух других парах -плоскости рыскания. Причем для исключения взаимного влияния возмущений при вдуве оси клапанов в каждой паре пересекаются под углом 40°÷60°, а точка их пересечения находится на расстоянии 1/3R…2/3R от центра окружности, образованной пересечением внутренней поверхности сопла с плоскостью инжекции газа, где R - радиус этой окружности.
Основными недостатками данного технического решения являются большое количество газодинамических органов управления и вдув под углом к перпендикуляру касательной к окружности в плоскости вдува. 8 газодинамических органов управления приводит увеличению массы конструкции относительно использования 4-х, а также увеличение количества элементов повышает сложность конструкции и снижает надежность. Вдув под углом, т.е. с тангенциальной составляющей, приводит к неравномерности параметров зоны возмущения, связанными с этим газодинамическими потерями и к увеличению расхода вдуваемого газа для достижения того же управляющего усилия, что при перпендикулярном вдуве. Также недостатком является невозможность применения данной системы в ракетных двигателях других типов.
Технической задачей, вытекающей из критики аналогов, является увеличение надежности и уменьшение потерь на управляющие усилия и момент при инжекции рабочего тела в сверхзвуковую часть сопла.
Для решения задачи и обеспечения технического результата предложено сопло, состоящее из сопла и инжекционных органов управления. Данное сопло имеет овальную форму поперечного сечения его сверхзвуковой части, соотношение а/b от 1,001 до 3, где а - длина большой полуоси, b - длина малой полуоси овала, образованного пересечением внутренней поверхностью сопла и плоскостью среза сопла, содержит 4 инжекционных органа управления, отверстия клапанов расположены своими осями перпендикулярно к касательным к овалу, образованного пересечением внутренней поверхности сопла и плоскостью инжекции рабочего тела, и своими осями образующие с большой полуосью этого овала в проекции на данную плоскость угол γ от 30° до 60°.
Угол γ в сопле может быть равен строго 45°.
Соотношение среза сопла а/b, для уменьшения газодинамических потерь, может принимать значения от 1,001 до 1,2.
Форма поперечного сечения сверхзвуковой части сопла может выполняться в форме эллипса.
Овальная форма поперечного сечения сопла позволяет создать плечо между вектором управляющей силы, создаваемой инжекцией рабочего тела, и осью сопла что приводит к появлению момента. В сравнении с потребными управляющими усилиями по рысканию и тангажу ЛА потребный управляющий момент невелик, учитывая что силы и момент создаются инжекцией через одни и те же отверстия и при помощи одних и тех же устройств, для создания необходимого момента, плечо между осью сопла и вектором управляющей силы должно так же быть небольшим, и, следовательно, отношение осей овала поперечного сечения а/b достаточно мало (менее 1, 2), что приводит к весьма незначительным потерям тяги из-за неравномерности потока по срезу сопла.
Инжекция рабочего тела происходит перпендикулярно стенке сопла т.е. без тангенциальной составляющей, что позволяет уменьшить газодинамические потери и массовый расход, необходимый для создания управляющего усилия, тем самым повышая эффективность системы управления.
Технический результат, достигаемый в результате реализации изобретения -это увеличение надежности за счет упрощения конструкции, уменьшения элементов конструкции и повышение эффективности за счет уменьшения газодинамических потерь при инжекции рабочего тела.
Предлагаемое изобретение поясняется чертежами:
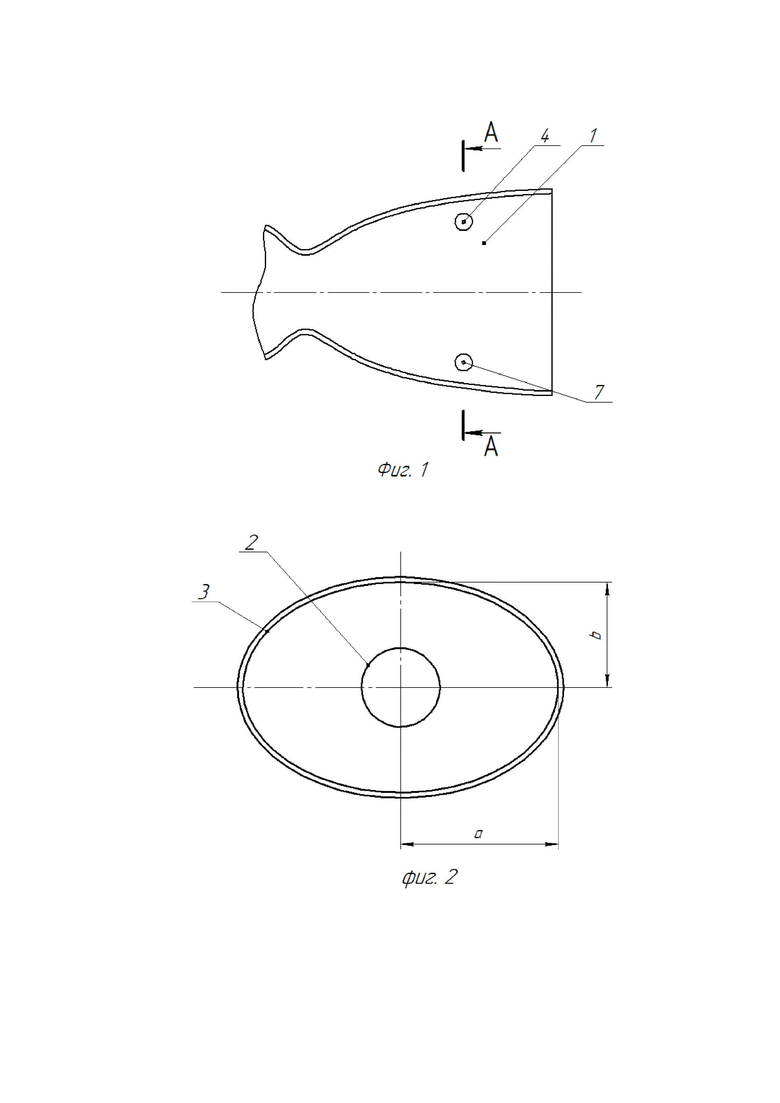
Фиг. 1. Сопло вид сбоку;
Фиг. 2. Сопло вид спереди;
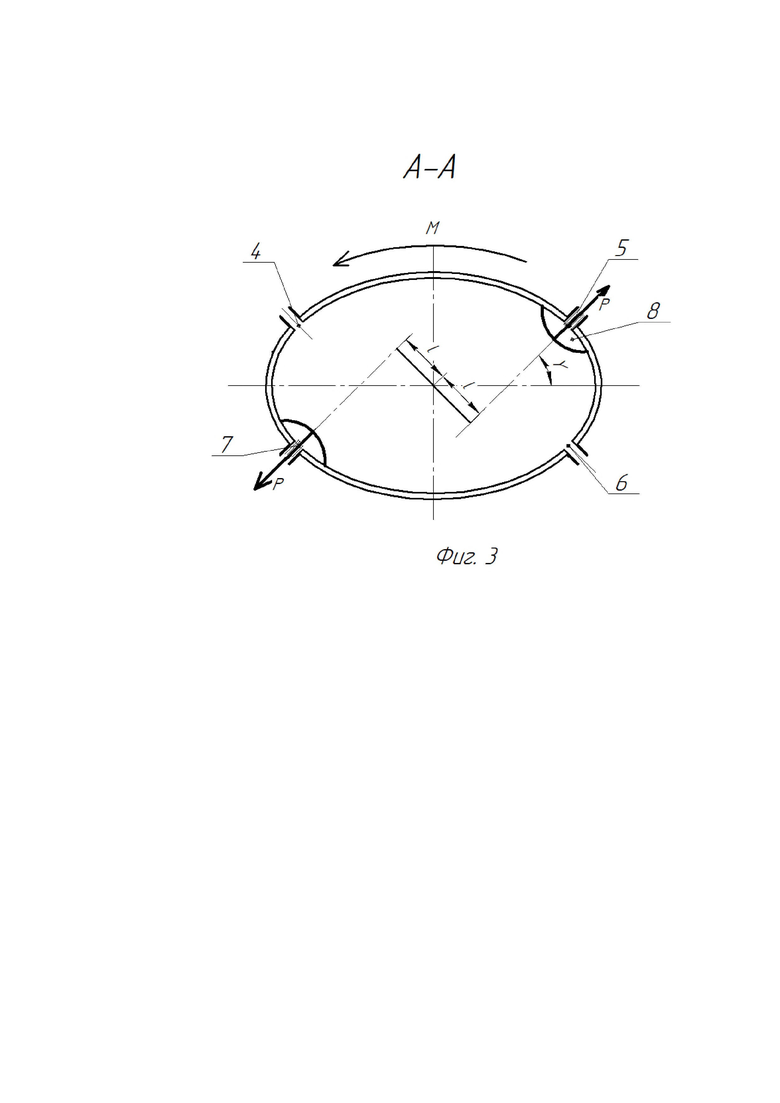
Фиг. 3. Сечение сопла А-А по месту расположения отверстий инжекции рабочего тела.
На фиг. 1, 2, 3 обозначены: Сопло 1, критическое сечение сопла 2, срез сопла 3, отверстия клапанов 4, 5, 6, 7, через которые подается рабочее тело, возмущенная зона 8.
Сопло Новикова осуществляет управление вектором тяги реактивного двигателя по трем необходимым углам за счет повышения давления на боковой поверхности сопла 1 в зоне 8 (см. фиг. 3) и возникновении реактивной силы вторичной струи путем поперечной инжекции рабочего тела в его сверхзвуковую часть. Сечение сверхзвуковой части сопла 1 имеет овальную форму и определенное расположение отверстий клапанов 4, 5, 6 и 7 позволяет управлять тягой в двух перпендикулярных направлениях и создавать момент М вокруг оси сопла 1.
Отношение длин полуосей овала среза сопла 3 а/b (см. фиг. 2) рассчитывается исходя из соотношения потребных управляющих усилий по рысканию и тангажу и потребного момента по крену. Если выполнить форму поперечного сечения сопла 1 в виде эллипса, который является частным случаем овала, и принять угол γ=45°, то геометрические параметры среза сопла 3 можно найти из следующей системы уравнений:
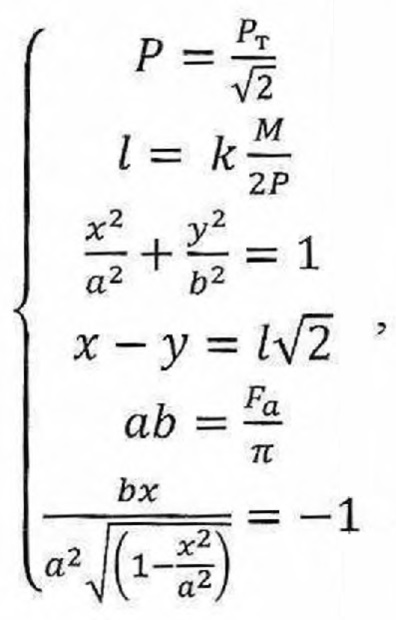
где Р - проекция силы на плоскость поперечного сечения, создаваемой инжекцией рабочего тела через одно отверстие; Рт -управляющее усилие по тангажу; l - расчетное плечо, необходимое для создания момента; k(1…, 5) -коэффициент учитывающий перераспределение давления по стенке сопла 1 в поперечном сечении из-за овальности поперечного сечения сопла 1 и уменьшение плеча из-за удаления плоскости инжекции от среза сопла 3; М - потребный момент; х,у - координаты пересечения плоскостью, в которой лежат оси отверстий инжекции и параллельной оси сопла, среза сопла; а,b - длины полуосей овала; Fa- площадь среза сопла.
Овальная форма поперечного сечения сверхзвуковой части сопла 1 и расположение отверстий клапанов 4-7 в проекции на плоскость этого сечения под определенным углом γ к большой полуоси овала и перпендикулярно к касательным к овалу создает плечо l между вектором силы, полученной за счет поперечной инжекции рабочего тела в закритическую часть сопла 1, и осью сопла 1, что в итоге приводит возникновению момента М, позволяющего управлять ЛА по углу крена (см. фиг. 3).
Использование сопла 1 возможно при большом диапазоне значений соотношения а/b, обеспечивая необходимые управляющие усилия и моменты для управления по тангажу, рысканию и крену. Однако при больших значениях данного соотношения повышаются потери тяги из-за овальности поперечного сечения сопла 1. Распределение давлений по стенке сопла 1 в поперечном сечении приобретает заметный градиент, в зоне большой полуоси овала давление выше, чем в зоне малой полуоси, что помимо газодинамических потерь на тягу приводит к усложнению и утяжелению конструкции сопла 1 для обеспечения его жесткости. Аналогичная картина распределения и у температуры, что накладывает дополнительные требования к теплозащитному покрытию. Поэтому сопло наиболее эффективно при соотношении а/b менее 1,2.
При больших значениях площади среза сопла 3 и достаточно больших управляющих усилиях по рысканию и тангажу, при том, что потребные управляющие моменты по крену малы, величина соотношения а/b стремится к 1, вплоть до значения 1,001.
Угол γ может варьироваться из соотношения потребных управляющих усилий по рысканию и тангажу. Также при увеличении отношения а/b овала, для получения максимального плеча l управляющего момента по крену, угол γ между большей полуосью овала и проекцией осей отверстий клапанов 4-7 будет увеличиваться. Однако для обеспечения достаточно близких управляющих усилий по рысканию и тангажу и учитывая то, что при инжекции рабочего тела фактически угол между вектором созданной силы Р и большей полуосью овала будет немного больше чем между проекцией оси отверстий клапанов 4-7 и этой полуосью, смещение происходит за счет повышенного давления у стенки сопла 1 в области большой полуоси. Поэтому, при малом отношении а/b (менее 1, 2), удобным для расчетов и выгодным для обеспечения управления вектором тяги по трем каналам угол γ принимается равным 45°.
Обеспечение управления по трем каналам возможно при использовании любой разновидности овала, как формы сечения сверхзвуковой части сопла 1, однако наиболее подходящим для расчетов и обеспечивающий равномерное изменение кривизны, что исключает резкие скачки газодинамических параметров потока по стенке сопла в поперечном сечении, является эллипс.
Критическое сечение сопла 1 остается осесимметричным, для стабильной работы двигателя и равномерности характеристик потока относительно оси сопла 1 в критическом сечении сопла 2. Приобретение формы овала в поперечном сечении сопла 1 по мере отдаления от критического сечения сопла 2 происходит постепенно, конечное отношение полуосей а/b сечения начинает выполнятся к месту отрыва потока во время инжекции и сохраняется до среза сопла 3, это необходимо для стабильности и рассчетности управляющей силы и момента.
Алгоритм работы сопла Новикова реализуется соответствующим порядком инжекции рабочего тела через отверстия клапанов 4-7. Для создания управляющего усилия по тангажу при расположении отверстий клапанов 4-7 под углом γ ≈ 45° (см. фиг. 3) инжекция происходит сразу через два клапана, например, инжекция одновременно через отверстия клапанов 4 и 5 приводит к возникновению управляющей силы, направленной вверх. Для создания усилия по рысканию инжекция производится аналогичным образом, например, инжекция одновременно через отверстия клапанов 5 и 6 создает управляющую силу, направленную вправо. Для создания управляющего момента вокруг оси сопла инжекция рабочего тела производится через противоположные клапаны, например, инжекция через отверстия клапанов 5 и 7 (см фиг. 3) создаст управляющий момент направленный против часовой стрелки. Также возможны варианты инжекции рабочего тела через 1 или 3 клапана. Такая инжекция приведет к тому, что управление будет осуществляться одновременно по трем каналам, например, при инжекции через отверстия клапана 4 появится управляющее усилие по каналу тангажа, направленное вверх, по каналу рыскания направленное влево и по каналу крена, направленное по часовой стрелке. Использование подобного алгоритма работы позволяет управлять в некоторых случаях не последовательно по трем каналам, а одновременно, что сократит расход рабочего тела и повысит эффективность, однако это усложняет модель управления и требует повышения вычислительной мощности приборов управления.
Таким образом данное техническое решение позволяет увеличить надежность за счет упрощения конструкции, уменьшения элементов конструкции и повысить эффективность за счет уменьшения газодинамических потерь при инжекции рабочего тела. При этом для управления вектором тяги по рысканию, тангажу и крену используется одна система управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2594844C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ И СВЕРХЗВУКОВОЕ СОПЛО | 2009 |
|
RU2412368C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| МАНЕВРИРУЮЩАЯ СТУПЕНЬ РАКЕТЫ С КОМБИНИРОВАННОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СПОСОБ УПРАВЛЕНИЯ ЕЕ ДВИЖЕНИЕМ | 2010 |
|
RU2427507C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2726214C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СОПЛА С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2312244C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| Устройство обеспечения посадки возвращаемой многоразовой ступени ракеты-носителя | 2024 |
|
RU2841245C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2097286C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2706760C1 |
Изобретение относится к авиационно-ракетной технике, в частности к системам управления вектором тяги двигателя летательного аппарата методом инжекции рабочего тела в сверхзвуковую часть сопла, содержащего ракетное сопло и инжекционные органы управления. Сопло содержит 4 инжекционных органа управления, каждый из которых представляет собой клапан, через отверстия которых рабочее тело подается в сопло, имеющее овальную форму поперечного сечения его сверхзвуковой части. Отверстия клапанов расположены своими осями перпендикулярно к касательным к овалу, образованному пересечением внутренней поверхности сопла и плоскостью инжекции рабочего тела, и своими осями образуют с большой полуосью этого овала в проекции на данную плоскость определенный угол γ от 30 до 60°. Изобретение обеспечивает управление вектором тяги реактивного двигателя по тангажу, рысканию и крену, используя одну систему управления, позволяет увеличить надежность за счет упрощения конструкции, уменьшения элементов конструкции и повысить эффективность за счет уменьшения газодинамических потерь при инжекции рабочего тела. 3 з.п. ф-лы, 3 ил.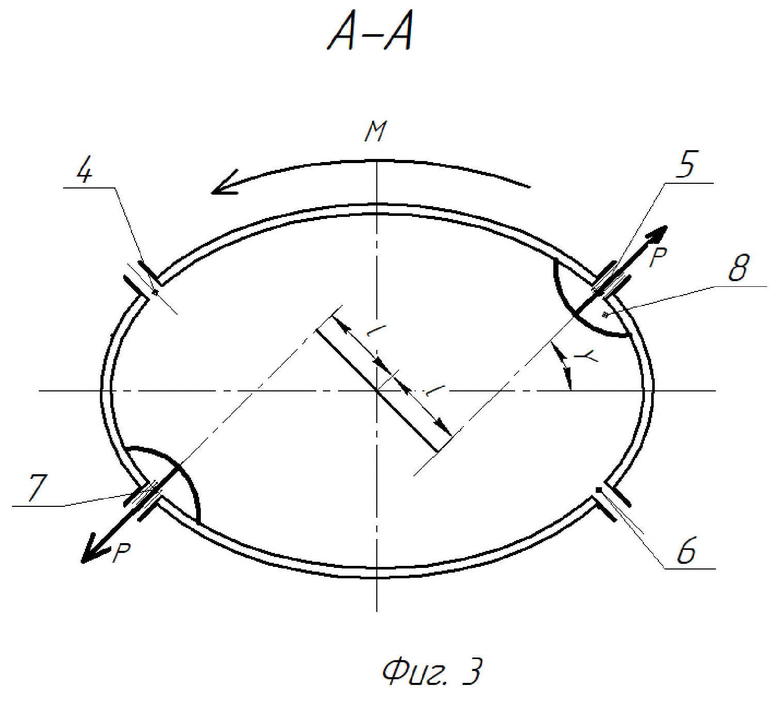
1. Сопло, содержащее инжекционные органы управления, каждый из которых представляет собой клапан, отличающееся тем, что сопло имеет овальную форму поперечного сечения его сверхзвуковой части, соотношение а/b от 1,001 до 3, где а - длина большой полуоси, b - длина малой полуоси овала, образованного пересечением внутренней поверхностью сопла и плоскостью среза сопла, содержит 4 инжекционных органа управления, отверстия клапанов расположены своими осями перпендикулярно к касательным к овалу, образованному пересечением внутренней поверхности сопла и плоскостью инжекции рабочего тела, и своими осями образуют с большой полуосью этого овала в проекции на данную плоскость угол γ от 30 до 60°.
2. Сопло по п. 1, отличающееся тем, что угол γ=45°.
3. Сопло по п. 1, отличающееся тем, что соотношение а/b от 1,001 до 1,2.
4. Сопло по п. 1, отличающееся тем, что форма поперечного сечения его сверхзвуковой части представляет собой эллипс.
| СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2594844C1 |
| Способ изготовления шлифовальной шкурки | 1982 |
|
SU1180251A1 |
| КАМЕРА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ГАЗОДИНАМИЧЕСКИМ СПОСОБОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 2021 |
|
RU2771254C1 |
| GB 916692 A, 23.01.1963. | |||

