Изобретение относится к военной технике, преимущественно к тактическим и оперативно-тактическим комплексам управляемого ракетного оружия (УРО) с баллистическими (аэробаллистическими) и высотными крылатыми ракетами.
Известны комплексы УРО, обеспечивающие поражение целей управляемыми (самонаводящимися) баллистическими и крылатыми ракетами - см., например, Е.Б. Волков, Г.Ю. Мазинг, В.Н. Сокольский «Твердотопливные ракеты», М., Машиностроение, 1992, стр. 275-280; С.А. Головин, Ю.Г. Сизов, А.Л. Скоков, Л.Л. Хунданов «Высокоточное оружие и борьба с ним», М., изд-во «В.П.К.», 1996.
Известен способ управления полетом баллистического самонаводящегося реактивного снаряда, обеспечивающий высокоточное поражение цели за счет размещения на борту снаряда системы наведения (СН), в т.ч. оптико-электронной - см., например, патент РФ №2216708, приоритет от 25.03.2002 (ближайший аналог).
Однако способ - ближайший аналог - при оснащении баллистического реактивного снаряда оптико-электронной СН корреляционно-экстремального типа не обеспечивает заданной точности попадания при наличии облачности в районе цели свыше 3 баллов.
Техническим результатом предлагаемого изобретения является расширение погодного диапазона применения баллистических и высотных крылатых ракет с оптико-электронными СН корреляционно-экстремального типа.
Указанный технический результат достигается тем, что в состав оптико-электронной корреляционно-экстремальной СН ракеты дополнительно вводят лазерный высотомер (ЛВ), функционирование СН начинают на удалении от цели и при высоте полета ракеты 1…20 км, при этом, в случае приема ЛВ отраженных подстилающей поверхностью сигналов выше порогового уровня, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию пикирующей траектории ракеты вплоть до окончания полета, а в случае приема ЛВ отраженных сигналов ниже порогового уровня осуществляют программный маневр ракеты в плоскости стрельбы с выходом на участок пологого планирования на высоте 100…500 м за 0,5…15,0 км от цели, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию планирующей траектории ракеты, с пикирующим конечным участком за 0,1…2,0 км от цели, вплоть до окончания полета.
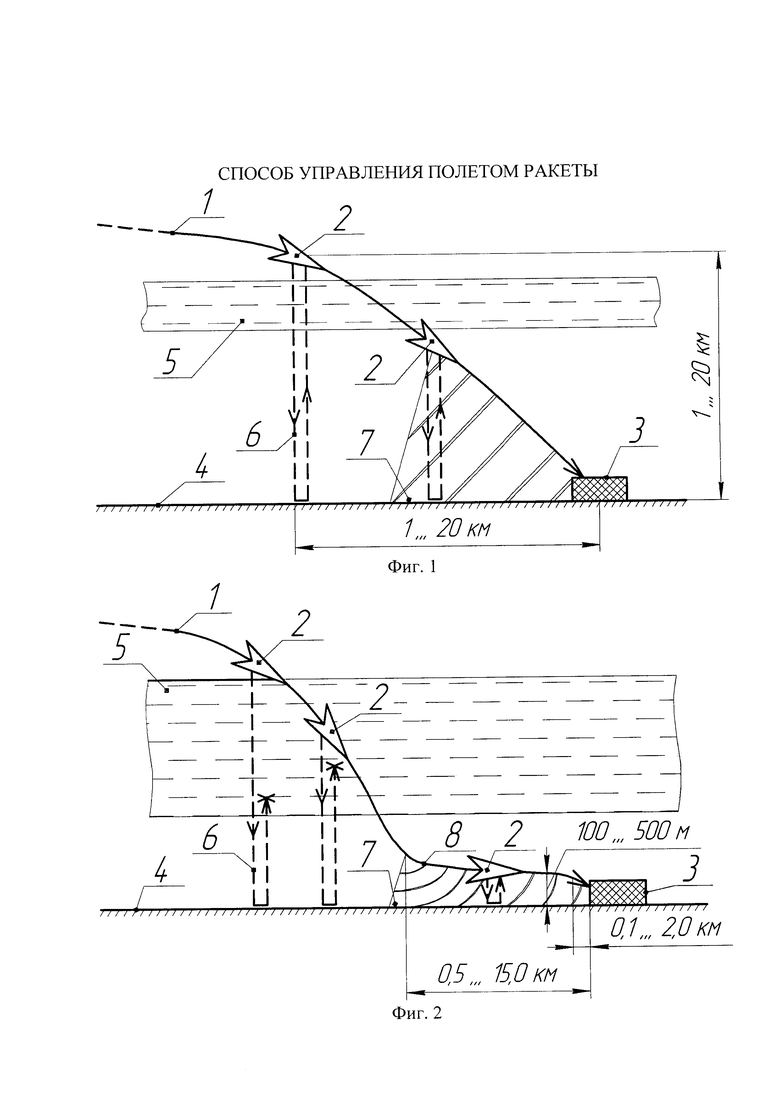
Принципиальные схемы траекторий движения ракеты в зоне цели при реализации предложенного технического решения представлены на фиг. 1, 2.
Приняты обозначения:
1 - высотная (в т.ч. баллистическая) траектория полета ракеты;
2 - некоторое «мгновенное» положение ракеты на траектории;
3 - цель;
4 - подстилающая поверхность;
5 - облачный слой в районе цели;
6 - зондирующие сигналы ЛВ;
7 - зона проведения корреляционно-экстремальной привязки оптико-электронной СН и коррекции траектории ракеты;
8 - близкий к горизонтальному участок движения ракеты (пологое планирование ракеты).
На фиг. 1 приведена схема движения ракеты поз. 2 по баллистической траектории поз. 1 с коррекцией при пикировании в зоне поз. 7 вплоть до поражения цели поз. 3. При этом на удалении 1…20 км от цели поз. 3 и с высоты 1…20 км оптико-электронная корреляционно-экстремальная СН ракеты поз. 2 осуществляет лоцирование подстилающей поверхности поз. 4 посредством зондирующих сигналов поз. 6 дополнительно введенного ЛВ. При незначительном (1-2 балла) облачном слое поз. 5 в районе цели поз. 3 либо отсутствии облаков - зондирующие сигналы поз.6, отразившись от подстилающей поверхности поз. 4 и достигнув ракеты поз. 2, энергетически превышают программно заданное пороговое значение. Для оптико-электронной СН ракеты поз. 2 - это признак «достаточной» метеорологической дальности видимости (МДВ) для ее штатной работы. В этом случае корреляционно-экстремальная работа СН (координатная привязка ракеты посредством сравнения наблюдаемого и эталонного изображений подстилающей поверхности) осуществляется при пикировании ракеты поз. 2 в зоне поз. 7 вплоть до поражения цели поз. 3.
На фиг. 2 приведена схема движения ракеты поз. 2 с программным маневром на конечном участке. Лоцирование ЛВ с борта ракеты поз. 2 подстилающей поверхности поз. 4 начинается на высотной траектории поз. 1 аналогично схеме на фиг. 1. При значительном облачном слое поз. 5 зондирующие сигналы поз. 6 ЛВ, интенсивно затухая при прямом и обратном (после отражения от подстилающей поверхности поз. 4) ходе в облачном слое поз. 5, не достигают заданного порогового значения. Для оптико-электронной СН ракеты поз. 2 - это признак «недостаточной» МДВ для ее штатной работы. В этом случае ракета поз. 2 программно выполняет маневр «выполаживания» на высоте 100…500 м над подстилающей поверхностью поз. 4 (в плоскости стрельбы). Корреляционно-экстремальная привязка СН ракеты поз. 2 осуществляется в зоне поз. 7 при минимальной высоте полета ракеты на протяжении 0,51…5,0 км участка поз. 8, близкого к горизонтальному (пологого планирования) вплоть до пикирования на цель поз. 3 в конце участка поз. 8 за 0,1…2,0 км до цели. Таким образом, с учетом данных дополнительно введенного в состав СН лазерного высотомера, появляется возможность оперативной - непосредственно в полете ракеты поз. 2 - оценки уровня МДВ и адаптивного выбора тактики высокоточного поражения цели поз. 3.
Маловысотный участок движения поз. 8 позволяет кардинально уменьшить толщину облачного слоя поз. 5, через который производится лоцирование ЛВ подстилающей поверхности поз. 4. При этом, как правило, достигается превышение порогового значения сигналами поз. 6 (т.е. возможна штатная работа оптико-электронной СН ракеты на высоте пологого планирования). Следует также отметить, что оптико-электронная СН корреляционно-экстремального типа допускает, в принципе, определение типа и балльности облачности в зоне цели с большой (надоблачной) высоты полета ракеты, что, в перспективе, может быть использовано для оперативной коррекции величины порогового значения принимаемых зондирующих сигналов поз. 6 и, соответственно, уточнения значения высоты участка поз. 8 над подстилающей поверхностью поз. 4.
Применение предложенного технического решения представляется целесообразным для перспективных комплексов высокоточного УРО на базе баллистических (аэробаллистических) и крылатых ракет с оптико-электронными СН корреляционно-экстремального типа для расширения погодного диапазона их применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СВЕРХЗВУКОВАЯ РАКЕТА | 2017 |
|
RU2686567C2 |
| СПОСОБ ЭКСТРЕННОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ОБЪЕКТАМ СПАСЕНИЯ, ПОПАВШИМ В ЭКСТРЕМАЛЬНЫЕ УСЛОВИЯ И ТЕРПЯЩИМ БЕДСТВИЕ В УДАЛЕННЫХ БЕЗЛЮДНЫХ РАЙОНАХ ЗЕМНОГО ШАРА С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И АЭРОБАЛЛИСТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2076759C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| СПОСОБ ПОРАЖЕНИЯ УДАЛЕННЫХ ЦЕЛЕЙ | 2019 |
|
RU2730793C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| КИНЕТИЧЕСКАЯ РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА ВООРУЖЕНИЯ | 2020 |
|
RU2752730C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
Изобретение относится к военной технике, преимущественно к тактическим и оперативно-тактическим комплексам управляемого ракетного оружия (УРО) с баллистическими (аэробаллистическими) и высотными крылатыми ракетами. В состав оптико-электронной корреляционно-экстремальной СН ракеты дополнительно вводят лазерный высотомер (ЛВ). Функционирование СН начинают на удалении от цели и при высоте полета ракеты 1…20 км, при этом, в случае приема ЛВ отраженных подстилающей поверхностью сигналов выше порогового уровня, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию пикирующей траектории ракеты вплоть до окончания полета. В случае приема ЛВ отраженных сигналов ниже порогового уровня, осуществляют программный маневр ракеты в плоскости стрельбы с выходом на участок пологого планирования на высоте 100…500 м за 0,5…15,0 км от цели, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию планирующей траектории ракеты, с пикирующим конечным участком за 0,1…2,0 км от цели, вплоть до окончания полета. Изобретение позволяет расширить погодный диапазон применения ракет. 2 ил.
Способ управления полетом ракеты, включающий прицеливание на пусковой установке, старт, полет по высотной траектории в точку прицеливания, коррекцию траектории полета ракеты на конечном участке по информации оптико-электронной системы наведения (СН), визирующей контрастные ориентиры подстилающей поверхности, отличающийся тем, что функционирование СН начинают на удалении от цели и при высоте полета ракеты 1-20 км путем излучения по местной вертикали и приема лоцирующих сигналов дополнительно введенного лазерного высотомера (ЛВ), при этом, в случае приема ЛВ отраженных подстилающей поверхностью сигналов выше порогового уровня, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию пикирующей траектории ракеты вплоть до окончания полета, а в случае приема ЛВ отраженных подстилающей поверхностью сигналов ниже порогового уровня, осуществляют программный маневр ракеты в плоскости стрельбы с выходом на участок пологого планирования на высоте 100-500 м за 0,5-15,0 км от цели, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию планирующей траектории ракеты, с пикирующим конечным участком за 0,1-2,0 км от цели, вплоть до окончания полета.
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2011 |
|
RU2468327C1 |
| US 4383662 A1, 17.05.1983 | |||
| DE 3738580 A1, 01.06.1989. | |||

