Изобретение относится к области ракетной техники и может быть использовано для применения в ракетах класса «поверхность-поверхность», оснащенных телетепловизионными головками самонаведения, запускаемых с мобильных пусковых установок, на базе колесной или гусеничной техники и надводных кораблей. Изобретение предусматривает использование серии из нескольких предварительно подготовленных опорных изображений местности и цели на ней в видимой и инфракрасной области спектра, с помощью двухспектральной камеры с беспилотного летательного аппарата на конечном участке траектории полета ракеты к цели.
Как известно [1], для управления полетом ракет класса «поверхность-поверхность», с пассивным самонаведением широко используются телевизионные (ТВ) и тепловизионные (ТПВ) камеры. Первые из них, регистрируют отраженный лучистый поток в видимой (ВИ) и ближней инфракрасной (ИК) области спектра, ТПВ камеры, работающие в телевизионном формате и формирующие черно-белые или псевдоцветные изображения, регистрируют лучистый поток, излученный от цели и фона в тепловом ИК участке.
Такие передающие ТВ/ТПВ камеры применяются для регистрации лучистого потока электромагнитной энергии в оптическом диапазоне длин волн от 0,2 мкм до 14,0 мкм, а также его преобразования в электрические видеосигналы, для формирования из них цифровых изображений, как выходных элементов процесса регистрации. Прием отраженного или излученного лучистого потока осуществляют в ультрафиолетовой (УФ) от 0,25 мкм до 0,38 мкм, в ВИ от 0,38 мкм до 0,76 мкм и ИК области спектра. В свою очередь ИК область спектра делится на, так называемую, ближнюю ИК область спектра (для регистрации отраженного потока) от 0,76 мкм до 2,5 мкм, и средняя ИК область спектра (для регистрации излученного потока) - отдельные участки в интервале длин волн от 2,5 мкм до 5,0 мкм.
Проявление поглощающих свойств атмосферы в коротковолновой части ВИ области спектра резко сказывается на величине спектральных контрастов объектов поверхности Земли, поэтому нижняя граница спектрального интервала, в этом случае, приемлема с величин порядка 0,4-0,45 мкм. Кроме того, атмосфера Земли не является прозрачной и в других спектральных участках, поэтому большинство оптико-электронных и ТВ систем дистанционного зондирования поверхности Земли работают в так называемых «окнах прозрачности» атмосферы: 0,4-1,1 мкм; 1,5-1,75 мкм; 2,9-3,8 мкм, 4,7-5,3 мкм; 8,0-14,0 мкм и др. [2].
Известны различные способы и устройства для управления полетом ракет к цели на поверхности Земли с пассивным самонаведением в автономном полете. Так, например, в авторском свидетельстве [3], рассматривается система управления ракетой, предназначенной для наведения на малоконтрастные цели, на произвольном фоне поверхности, состоящая из специальной головки визирования, обеспечивающей захват и сопровождение указанных целей, и самонастраивающегося автопилота, обеспечивающего выход в зону захвата и управление ракетой с минимальными ошибками.
Особенностью технического решения данного изобретения является то, что предлагается использовать операцию запоминания изображения участка местности и осуществлять сравнение запоминаемого изображения с текущим изображением этого же участка в процессе полета ракеты.
Однако, при уменьшении контраста цели, в виду погодных, временных изменения или ее маскировки данное решение не обеспечивает точное формирование необходимой управляющей информация для автопилота, что приводит к понижению точности наведения или даже к потере цели, что является значительным недостатком изобретения.
В патенте [4] описан способ управления полетом ракеты, включающий прицеливание на пусковой установке, старт, полет по высотной траектории в точку прицеливания, коррекцию траектории полета ракеты на конечном участке по информации оптико-электронной системы наведения (ОЭСН), визирующей контрастные ориентиры подстилающей поверхности, отличающийся тем, что функционирование ОЭСН начинают на удалении от цели и при высоте полета ракеты 1-20 км, путем излучения по местной вертикали и приема лоцирующих сигналов дополнительно введенного в конструкцию лазерного высотомера (ЛВ), одновременно с этим производят корреляционно-экстремальную привязку к подстилающей поверхности и в зависимости от данных ЛВ осуществляют коррекцию пикирующей траектории ракеты вплоть до окончания полета, или программный маневр ракеты в плоскости полета с выходом на участок пологого планирования на высоте 100-500 м, за 0,5-15,0 км от цели, производят корреляционно-экстремальную привязку к подстилающей поверхности и коррекцию планирующей траектории ракеты, с пикирующим конечным участком за 0,1-2,0 км от цели, вплоть до окончания полета.
Недостатком данного способа является свойства и наличие излучения ЛВ, особенно на конечном участке наведения, а также слабая помехозащищенность, как корреляционно-экстремальной ОЭСН, так и ЛВ от плохих погодных условий (облачность, туман, осадки) и искусственных оптических помех (дымы, маскировка).
Известен способ и устройство управления полетом ракеты [5]. Способ заключается в том, что на поверхности цели выбирают точку слежения головки самонаведения (ГСН), далее в процессе автономного полета измеряют параметры относительного движения ракеты и точки слежения на поверхности цели и обеспечивают движение ракеты по направлению «точка пуска - точка слежения» и контролируют положение точки слежения путем определения величины текущего отклонения точки слежения от выбранной перед пуском и сравнения этой величины с пороговым значением. При этом в качестве параметров относительного движения ракеты и точки слежения на поверхности цели используют угловые скорости линии визирования, углы пеленга и углы отклонения углов пеленга от их среднего значения.
Недостатком данного способа и устройства является необходимость постоянного нахождения, точки слежения в ракурсе оптической системы ГСН и изменяющаяся погрешность при определении углов рысканья и тангажа и их угловых скоростей по трассе подлета ракеты при движении от точки старта до цели, и ее зависимость от текущей относительной дальности, что в совокупности приводит к ухудшению автосопровождения и точности попадания ракеты в цель.
Известен также способ прицеливания и наведения ракеты на цель с помощью обзорно-прицельной системы (ОПС) вертолета и эталонных изображений (ЭИ) цели [6]. Способ, включающий формирование точки целеуказания при наблюдении изображения сцены на видеомониторе ОПС с ТВ прицелом и наведению линии визирования телевизионной камеры гирокоординатора на цель, используя пульт управления, привода наведения и информацию с датчиков углов поворота ОПС, обладает следующими особенностями: оператор задает точку целеуказания на изображении, полученном от ТВ прицела ОПС, бортовым спецвычислителем формируется два ЭИ, одно сжатое с метрическими характеристиками, совпадающими с аналогичными характеристиками изображения телевизионной камеры ГСН ракеты, другое несжатое цифровое изображение, сформированное вокруг точки, указанной оператором в момент целеуказания.
Основным недостатком способа является использование для формирования ЭИ сам носитель ракеты, в частности его ОПС, для которой не характерны функции информационного обеспечения эталонной видеоинформацией системы самонаведения ракет, вследствие чего целеуказание ограничивается всего двумя ЭИ: сжатым фоноцелевым изображением с указанной оператором целью и не сжатым изображением фона вокруг цели. Кроме этого носитель, обладает значительно ограниченными возможностями по движению для формирования изображений цели с разнообразных ракурсов и дальностей, что значительно ограничивает качество видеоинформационного обеспечения системы наведения ракеты в цель по маршруту полета.
В качестве наиболее близкого аналога заявляемого изобретения по совокупности признаков и операций над сигналами принят способ формирования изображения цели для обеспечения применения управляемых ракет с оптико-электронной ГСН [7]. Данный способ направлен на решение задачи повышения вероятности обнаружения, распознавания объекта интереса и точности самонаведения ракеты в цель. Для этого, в способе, применяют формирование ЭИ местности с целью на ней, полученной с помощью цифровой камеры с квадрокоптера, для самонаведения по этому изображению управляемой ракеты, методом корреляционно-экстремального сравнения с кадрами видеосигнала, поступающего с камеры ГСН ракеты.
Предварительное обнаружение и определение топографических координат цели, в способе осуществляется расчетом операторов с земли, оснащенных носимыми средствами спутниковой или инерциально-магнитной навигации, цифровой радиосвязи, электронными картографическими планшетами и целеуказателем, обеспечивающим визирование объекта интереса и определение его координат после обнаружения. Полученные, таким образом, координаты по цифровой радиосвязи передаются на пусковую установку и на пульт оператора квадрокоптера, который осуществляет взлет и полет квадрокоптера в рассчитанную точку аэросъемки с цифровой камерой, входящей в состав бортовой аппаратуры квадрокоптера. Далее, над целью, оператор квадрокоптера переводит его в режим удержания заданных координат, высоты и ракурса на цель, включает камеру, с помощью которой формируют цифровое изображение цели, которое посредством цифрового радиоканала, транслируется на пульт пусковой установки.
Завершающей, операцией в способе является ввод в память ГСН, полученное с квадрокоптера ЭИ цели, ввод в систему управления ракеты рассчитанных ранее параметров траектории полета ракеты, а также пуск ракеты с пусковой установки. В полете, на конечном участке траектории, введенное в память ГСН изображение используют для получения управляющих сигналов самонаведения ракеты в цель, путем сравнения с текущими изображениями формируемые ГСН ракеты.
Основным недостатком рассмотренного способа, является отсутствие одновременного формирования ЭИ в ВИ и ИК областях спектра, что не позволяет наводить ракету на цель в любое время суток, без усложнений, ведущих к дополнительным затратам при подготовке ракеты к полету. Так же, в данном способе предлагается формировать лишь одно ЭИ цели, что не позволит проводить самонаведение ракеты с заданной точностью при ее полете на большей части конечного участка траектории, что будет причиной снижения точности попадания ракеты в цель.
Технический результат - повышение точности полета ракеты на конечном участке траектории с обеспечением круглосуточности ее самонаведения.
Технический результат достигается тем, что в отличие от известного способа формирования изображения цели для обеспечения применения управляемых ракет с оптико-электронной ГСН, включающего получение изображения цели с помощью цифровой камеры, установленной на борту летательного аппарата, передачи сигналов изображения с борта летательного аппарата по радиоканалу на наземную пусковую установку, запись сигнала изображения цели в бортовые аппаратные средства ракеты перед ее пуском, запуск ракеты, ее полет по заданной траектории к цели, коррекцию маршрута полета ракеты на конечном участке траектории, путем сравнения текущего изображения, получаемого с оптико-электронной ГСН ракеты с полученным ранее изображением цели, в предлагаемом способе, для получения текущих изображений подстилающей поверхности и цели, используется двухспектральная оптико-электронная система (ОЭС), установленная на борту беспилотного летательного аппарата (БПЛА) для регистрации лучистого потока в двух спектральных участках, включающих видимую и инфракрасную области спектра, при полете БПЛА, по траектории близкой к конечному участку предполагаемой траектории полета ракеты к цели, производится маршрутная видеосъемка подстилающей поверхности Земли и цели в видимой и инфракрасной областях спектра, таким образом формируются сигналы изображений телевизионного формата в двух спектрах, которые потом передаются на наземный пункт приема и управления (НППУ), где далее из них осуществляется выборка одиночных изображений, так называемых далее, опорных изображений (ОИ), которые записываются в устройство памяти ГСН ракеты, после этих операций производится запуск ракеты по заданной траектории, при подлете ракеты к ее конечному участку, производится последовательное сопоставление текущих изображений, получаемых с двухспектральной оптико-электронной ГСН с изображениями, ранее записанными в устройство памяти ГСН ракеты, в результате сравнения изображений вырабатываются сигналы рассогласования в систему управления, наводящую ракету в цель.
Для достижения указанного технического результата предлагается способ управления полетом ракеты, включающий предварительное формирование изображения цели с помощью камеры, установленной на борту летательного аппарата, передачи сигналов изображений с борта летательного аппарата по радиоканалу на наземную пусковую установку, запись сигнала изображения цели в устройство памяти аппаратных средств ракеты перед ее пуском, запуск ракеты и ее полет по заданной траектории к цели, коррекцию маршрута полета ракеты на конечном участке траектории, путем сравнения текущего изображения, получаемого с оптико-электронной ГСН ракеты с ОИ цели ранее записанным в устройство памяти ракеты, в котором, для получения изображений используют двухспектральную камеру, установленную на БПЛА, для регистрации лучистого потока в двух участках спектра, включающих видимую и инфракрасную области спектра, затем по маршруту расчетного конечного участка траектории полета ракеты к цели, производят маршрутную видеосъемку подстилающей поверхности Земли и цели в видимой и инфракрасной областях спектра с формированием сигналов двухспектральных изображений, которые потом передают по радиоканалу на НППУ, далее из последовательности полученных кадров, формируют выборку серии одиночных двухспектральных ОИ, характерных для конечного маршрута полета ракеты, которые записывают в устройство памяти ГСН ракеты, после чего производят ее запуск, при подлете ракеты к конечному участку траектории, производят последовательное сопоставление текущих изображений, получаемых с двухспектральной оптико-электронной ГСН ракеты с двухспектральными ОИ, ранее записанными в устройство памяти ГСН ракеты, после чего вырабатывают сигналы рассогласования по углу тангажа и рыскания для управления полетом ракеты к цели.
Применение предлагаемого способа на практике, позволит достигнуть качественного изменения и увеличения объема видеоинформационного обеспечения полета ракет класса «поверхность-поверхность», оснащенных пассивными оптико-электронными ГСН, что обеспечит возможность совершать полеты ракет в ночное время, без дополнительных временных затрат на предварительную подготовку к полету, а применение в заявленном способе не единственного ЭИ цели, как это осуществлялось в прототипе или в других известных способах, а применение специальным образом сформированной серии нескольких ОИ, позволит осуществлять управление ракеты на конечном участке траектории с более высокой точностью наведения ее в цель.
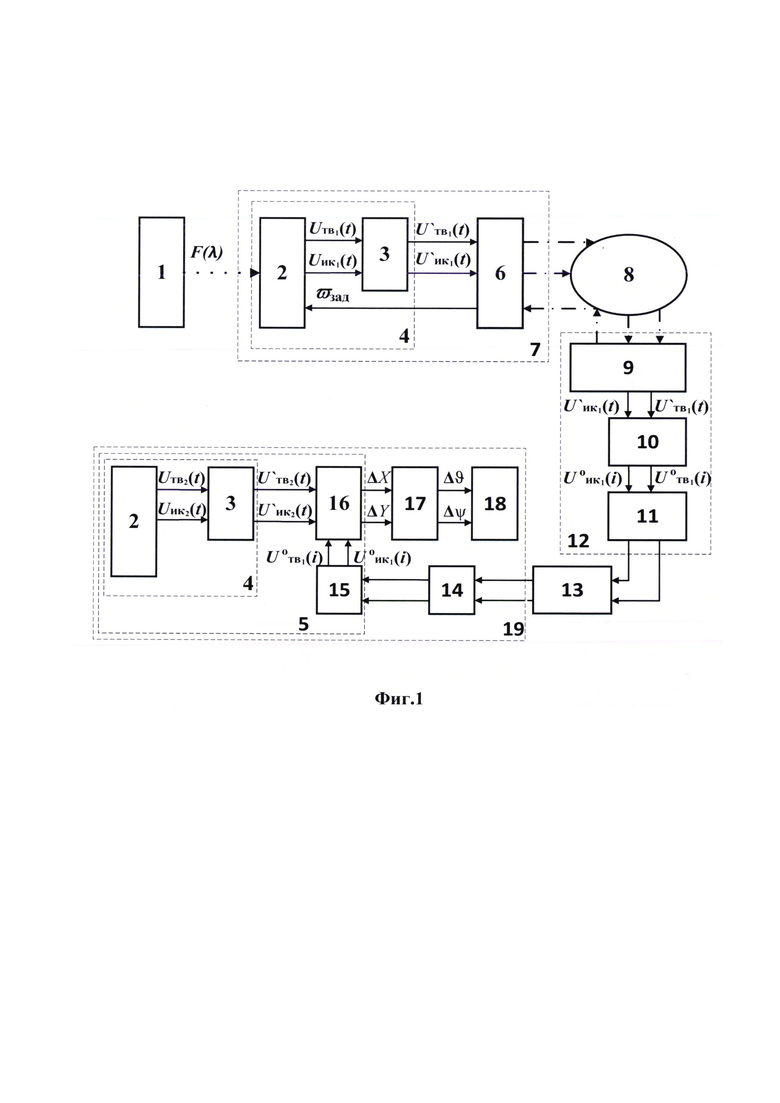
На фиг. 1, показана структурная схема, показывающая реализацию предлагаемого способа управления полетом ракеты класса «поверхность- поверхность», оснащенными пассивными оптико-электронными ГСН, на этапе подготовки видеоинформационного обеспечения их к пуску. Она включает в себя: объект интереса - 1, оптико-электронное входное звено - 2, блок обработки сигналов - 3, оптико-электронную систему - 4, головку самонаведения - 5, бортовой радиоприемопередающий модуль - 6, беспилотный летательный аппарат - 7, канал радиосвязи - 8, наземный радио приемо-передающий модуль - 9, блок выбора опорных изображений - 10, интерфейсный модуль проводной связи - 11, наземный пункт приема и управления - 12, коммутационный блок пусковой установки - 13, интерфейсный модуль связи - 14, запоминающие устройство - 15, блок сравнения сигналов изображений - 16, устройство формирования сигналов рассогласования - 17, систему управления - 18, управляемую ракету - 19.
Наиболее важными элементами схемы являются два одинаковых оптико-электронных входных звена 2, которые вместе с блоками обработки сигналов 3, входят в состав двухспектральной ОЭС 4. Структурной особенностью способа является то, что данные ОЭС, обладающие одинаковыми техническими параметрами, являются составной частью как бортового оборудования БПЛА 7, так и входят в состав ГСН ракеты 5, которой оснащается управляемая ракета 19. Основной функцией звеньев 2 является преобразование лучистого потока F(λ), отраженного или излученного объектом интереса 1 в спектральном участке с длинной волны от λ1 до λ2, в два сигнала изображения Uтв1(t), Uик1(t), пропорциональные интенсивности лучистого потока в ВИ и ИК областях спектра.
Сформированные таким образом сигналы изображений поступают на вход блока обработки сигналов 3, в котором осуществляется их предварительная обработка: фильтрация, усиление и цифровое преобразование, такое как цифровая коррекция алгоритмами гамма-коррекции, апертурная коррекция и другие виды цифровой обработки сигналов. Применение, как в БПЛА, так и в ракете одинаковых входных звеньев 2 и блоков обработки сигналов 3, является необходимым условием для использования предлагаемого способа самонаведения.
После обработки, сигналы изображений U’тв1(t), U’ик1(t) с выхода блока 3, входящего в состав в БПЛА 7, поступают на вход бортового радио приемопередающего модуля 6, который выполняет кодирование и передачу сигналов видеоизображений по каналу радиосвязи 8, на вход стационарного радио приемо-передающего модуля 9, входящего в состав НИНУ 12, где, после приема и декодирования, сигналы изображений поступают на вход вычислительного блока выбора ОИ 10, функционирование которого заключается в выборе отдельных изображений, из поступающих в него двух потоков видеосигналов телевизионного формата, соответствующих заданным параметрам выбора и различным дальностям до цели.
Число N - выбираемых ОИ не является константой, а определяется алгоритмом работы блока формирования 10 исходя из множества факторов, характерных для изображений поступающих на его вход, таких как максимальное отношение сигнал/шум, высокая информативность геометрических форм оптической сцены, наличие лучших различительных признаков контрастности, максимальное совпадения ракурсов на цель и метрических параметров объектов на изображении с ОЭС БПЛА, с соответствующими характеристиками на изображениях, которые будут поступать с ГСН ракеты, при полете ракеты к цели по маршруту предполагаемой траектории. Численно количество ОИ N определяется из условия: 2≤N≤Nmax, где Nmax - число, значение которого определяется длительностью полета ракеты на конечном участке траектории, а также аппаратными и вычислительными возможностями ГСН ракеты:

где Tкут - время полета ракеты по конечному участку траектории (КУТ);
Tкадр - время формирования кадров изображений блоком 2;
Tобр - время предварительной обработки изображений алгоритмом в блоке 3;
Tсрав - время сравнения изображений в блоке 16.
После окончания процесса выбора серии, ОИ  и
и  передаются из блока формирования 10, с помощью интерфейсного модуля проводной связи 11, через аппаратуру управления пусковой установкой 13 и интерфейсного модуля связи ракеты с пусковой установкой 14, в блок запоминающего устройства 15, ракеты 19. Таким образом завершается процесс предстартовой подготовки видеоинформационными данными системы самонаведения ракеты по предлагаемому способу.
передаются из блока формирования 10, с помощью интерфейсного модуля проводной связи 11, через аппаратуру управления пусковой установкой 13 и интерфейсного модуля связи ракеты с пусковой установкой 14, в блок запоминающего устройства 15, ракеты 19. Таким образом завершается процесс предстартовой подготовки видеоинформационными данными системы самонаведения ракеты по предлагаемому способу.
На фиг. 2 представлена, схема траектории полета БПЛА для проведения маршрутной видеосъемки. Типовая траектория полета ракеты к цели (объекту) на фиг. 2 обозначена точками О, A, B С, G, с конечным участком траектории D, Е, F, G, где осуществляется предлагаемое способом самонаведение ракеты в цель.
Общий принцип работы способа управления полетом ракеты заключается в следующем. После обнаружения любыми возможными способами и определения координат местоположения цели(объекта) производится расчет маршрута полета БПЛА, обозначенного участком С’-G’ , по которому осуществляется его полет с целью проведения маршрутной видеосъемки подстилающей поверхности и цели. Траектория полета С’-G’, рассчитывается исходя из координат обнаруженной цели - «объект», местоположения пусковой установки O и вида выбранной к применению траекторий полета ракеты.
Для достижения максимальной точности самонаведения ракеты необходимо, чтобы маршрут видеосъемки с БПЛА, обозначенный точками D’, Е’, F’, G’, максимально совпадал с расчетным маршрутом полета ракеты, обозначенный точками D, Е,F, G, а ракурсы, полученных при видеосъемке с БПЛА ОИ, максимально совпадали с ракурсами текущих изображений, получаемых ГСН, на конечном участке траектории полета ракеты. Управление ракурсами ОЭС БПЛА осуществляется по каналу радиосвязи 8, заданием с НППУ 12 параметров вектора угловой скорости вращения ωзад платформы с оптико-электронном входным звеном 2, из состава ОЭС 4, БПЛА 7, изображенных на фиг. 1. Управление угловой скоростью вращения платформы с камерами осуществляется для возможности формирования изображений местности и цели с максимально приближенными характеристиками к изображениям, которые будет получать ГСН при полете ракеты на конечном участке траектории.
На фиг. 3, представлена иллюстрация процесса формирования видеоизображений, с помощью видеосъемки с БПЛА, совершающего полет по маршруту на конечном участке траектории полета ракеты к цели (объекту). Из полученных двухспектральной ОЭС БПЛА, изображений подстилающей поверхности по маршруту полета, обозначенному участком С’-G’ в блоке 10, НППУ 12, см. фиг. 1, по условиям минимальных шумов и максимальной информативности изображений, а также максимального совпадения ракурсов и мгновенных полей зрения ϕОЭС БПЛА с характеристиками изображений с ОЭС ГСН ракеты, выбирается некоторое количество N ОИi, где i=1, 2,…, N, соответствующие определенным дальностям до цели Ri, где i=1, 2,…, N, которые затем, посредством интерфейсного модуля проводной связи 11, НППУ 12, через коммутационный блок пусковой установки 13, и интерфейсный модуль связи 14, записывается в запоминающее устройство 15, ракеты 19.
После старта и полета по заданной траектории до достижения ракеты конечного участка, на дальностях до цели Ri, при которых была произведена регистрация изображений с БПЛА, которые использовались для выбора из них соответствующих ОИ, в блоке сравнения сигналов изображений 16, входящего в состав ГСН 5 ракеты 19, производится последовательное сопоставление и анализ результатов сравнения сигналов изображений U’ ТВ2(t), U’ИК2(i), прошедших первичную обработку в блоке 3, ГСН 5, ракеты 19 и соответствующих им сигналов ОИ  поступающих из запоминающего устройства 15.
поступающих из запоминающего устройства 15.
В результате своей работы, блоком 16 выдаются сигналы пропорциональные отклонению направления полета ракеты от заданного в связанной системе координат ΔX(t) и ΔY(t), используя которые в устройстве формирования сигналов рассогласования 17, вырабатываются заданные отклонения по углу тангажа Δϑ(t) и рыскания Δψ(t), которые, в свою очередь, поступают в систему управления ракетой 18, для ее наведения к цели по заданной траектории полета.
Применение рассмотренного способа на практике позволит, за счет использования двухспектральной оптико-электронной телетепловизионной системы формирования серии двухспектральных изображений, идентичных изображениям формируемых в ГСН ракет класса «поверхность-поверхность», при их сравнении в полете ракеты к цели, выполнять ее наведение на цель со значительно более высокой точностью и обеспечить круглосуточность применения ракеты (день-ночь), при широком спектре условий ее применения и вариантов выбора траекторий.
Источники информации
1. Шилин А.А. Обзор пассивных оптических ГСН для поражения наземных тактических целей. Известия ТулГУ. Технические науки. 2014. Вып. 7.
2. Сагдуллаев Ю.С., Ковин С.Д., Спектральная селекция объектов в системах технического зрения: Монография, - М.: Издательство «Спутник+», 2023, - 470 с.
3. А.с. СССР № 1840806А, Система наведения управляемой ракеты, состоящая из головки совмещения изображений и самонастраивающегося автопилота/ Туманов А.В., Коновалов Е.А., Дятлов Ю.М., Исаев Н.С, ОАО «ВПК» НПО машиностроения», опубл. 10.06.2010 г. Бюл. № 16.
4. Патент РФ № 2595282С1. Способ управления полетом ракеты/Леонов А.Г., Мартынов В. И. и др., АО «ВПК «НПО Машиностроения», опубл. 27.08.2016 г., Бюл. № 24.
5. Патент РФ № 2112699С1. Способ и устройство управления полетом ракеты класса «воздух-поверхность» с пассивным самонаведением/Кегелес А.Л., Хейфец Л.Н., Шапиро Б.Л., и др., ГМКБ «Вымпел», опубл. 10.06.1998 г.
6. Патент РФ № 2697939С1. Способ автоматизации целеуказания при прицеливании на вертолетном комплексе/ Каракозов Ю.А., Селявский Т.В., Сухачев А.Б., Шапиро Б.Л., ЗАО «МНИТИ», опубл. 20.08.2018 г. Бюл. № 24.
7. Патент РФ № 2776005С1, Способ формирования изображения цели для обеспечения применения тактических управляемых ракет с оптико-электронной головкой самонаведения/Каплин А.Ю., Степанов М.Г., АО "РАДИОАВИОНИКА", опубл. 12.07.2022 г. Бюл. № 20.

Изобретение относится к области ракетной техники и касается способа управления полетом ракеты. Способ включает формирование посредством установленной на беспилотном летательном аппарате двухспектральной камеры изображения цели в видимой и инфракрасной областях спектра. Затем по маршруту расчетного конечного участка траектории полета ракеты с беспилотного летательного аппарата производят маршрутную видеосъемку подстилающей поверхности Земли и цели с формированием сигналов двухспектральных изображений, которые передают на наземный пункт приема и управления. Из полученных кадров формируют выборку серии одиночных опорных изображений, характерных для конечного маршрута полета ракеты, которые записывают в устройство памяти головки самонаведения ракеты. При подлете ракеты к конечному участку траектории производят последовательное сопоставление текущих изображений, получаемых с двухспектральной оптико-электронной головки самонаведения ракеты с опорными изображениями, записанными в устройство памяти головки самонаведения, после чего вырабатывают сигналы рассогласования по углу тангажа и рыскания для управления полетом ракеты к цели. Технический результат заключается в повышении точности полета ракеты на конечном участке траектории с обеспечением круглосуточности ее самонаведения. 1 з.п. ф-лы, 3 ил.
1. Способ управления полетом ракеты, включающий предварительное формирование изображения цели с помощью камеры, установленной на борту летательного аппарата, передачи сигналов изображений с борта летательного аппарата по радиоканалу на наземную пусковую установку, запись сигнала изображения цели в устройство памяти аппаратных средств ракеты перед ее пуском, запуск ракеты и ее полет по заданной траектории к цели, коррекцию маршрута полета ракеты на конечном участке траектории путем сравнения текущего изображения, получаемого с оптико-электронной головки самонаведения ракеты с опорным изображением цели, ранее записанным в устройство памяти ракеты, отличающийся тем, что для получения опорных изображений используют двухспектральную камеру, установленную на беспилотном летательном аппарате, для регистрации лучистого потока в двух участках спектра, включающих видимую и инфракрасную области спектра, затем по маршруту расчетного конечного участка траектории полета ракеты к цели с беспилотного летательного аппарата производят маршрутную видеосъемку подстилающей поверхности Земли и цели в видимой и инфракрасной областях спектра с формированием сигналов двухспектральных изображений, которые потом передают по радиоканалу на наземный пункт приема и управления, где далее из последовательности полученных кадров формируют выборку серии N одиночных двухспектральных опорных изображений, характерных для конечного маршрута полета ракеты, которые записывают в устройство памяти головки самонаведения ракеты, после чего производят ее запуск, а при подлете ракеты к конечному участку траектории производят последовательное сопоставление текущих изображений, получаемых с двухспектральной оптико-электронной головки самонаведения ракеты с двухспектральными опорными изображениями, ранее записанными в устройство памяти головки самонаведения ракеты, после чего вырабатывают сигналы рассогласования по углу тангажа и рыскания для управления полетом ракеты к цели.
2. Способ по п. 1, отличающийся тем, что при формировании опорных изображений их количество N определяется из условия: 2≤N≤P, где P - число, значение которого определяется аппаратными и вычислительными возможностями ГСН ракеты.
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ЦЕЛИ ДЛЯ ОБЕСПЕЧЕНИЯ ПРИМЕНЕНИЯ ТАКТИЧЕСКИХ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИКО-ЭЛЕКТРОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2021 |
|
RU2776005C1 |
| СПОСОБ ПОЛУЧЕНИЯ ОТЛИВОК ПО ВЫЖИГАЕМЫМ МОДЕЛЯМ, ИЗГОТОВЛЕННЫМ С ПОМОЩЬЮ ЛАЗЕРНОГО ПОСЛОЙНОГО СИНТЕЗА | 1998 |
|
RU2148465C1 |
| WO 2019099523 A1, 23.05.2019 | |||
| US 11385024 B1, 12.07.2022. | |||

