Предпосылки
Это описание относится к обнаружению положений границ многочисленных подземных слоев, например, на основании скважинных измерений удельного сопротивления.
В области каротажа с зондом на кабеле и каротажа в процессе бурения электромагнитные приборы каротажа удельного сопротивления используют для исследования геологической среды на основании электрического удельного сопротивления (или удельной проводимости, его обратной величины) пластов горных пород. Некоторые приборы каротажа удельного сопротивления включают в себя многочисленные антенны для излучения электромагнитного сигнала в пласт и многочисленные приемные антенны для приема отклика пласта. Свойства подземных слоев в пласте можно идентифицировать по отклику пласта, обнаруживаемому на приемниках.
Описание чертежей
На чертежах:
фиг. 1А - вид скважинной системы согласно примеру;
фиг. 1В - вид скважинной системы согласно примеру, которая включает в себя прибор каротажа удельного сопротивления, в условиях каротажа с зондом на кабеле;
фиг. 1С - вид скважинной системы согласно примеру, которая включает в себя прибор каротажа удельного сопротивления, в условиях каротажа в процессе бурения (КПБ);
фиг. 2 - структурная схема вычислительной системы согласно примеру;
фиг. 3 - вид прибора каротажа удельного сопротивления согласно примеру;
фиг. 4 - диаграмма модели пласта согласно примеру;
фиг. 5 - схема систем координат согласно примеру;
фиг. 6 - схема систем координат согласно примеру;
фиг. 7 - диаграмма, показывающая угловые элементы разрешения удельного сопротивления, согласно примеру;
фиг. 8 - снимки с экрана, которые включают в себя графики, показывающие пример модельных данных каротажа удельного сопротивления;
фиг. 9 - диаграмма примера способа обнаружения границ подземных слоев на основании данных каротажа удельного сопротивления; и
фиг. 10 - блок-схема последовательности действий примера способа идентификации границ подземных слоев;
На различных чертежах одинаковыми позициями обозначены аналогичные элементы.
Подробное описание
Согласно некоторым аспектам этого описания рассмотрены робастные способы инверсии. В некоторых реализациях способы инверсии можно использовать, например, для эффективного обнаружения многочисленных слоев пласта на основе разнесенных многочастотных направленных скважинных измерений в процессе бурения (ИПБ). В некоторых случаях расстояния до многочисленных верхних и нижних границ слоев идентифицируют на основании скважинных измерений удельного сопротивления, получаемых в одной точке каротажа. В некоторых случаях оценку расстояния до границы слоя (РГС) используют, например, для построения графического изображения профиля пласта и это позволяет оператору уверенно принимать меры быстрее и на основе более точной информации. Например, вычисленные расстояния до многочисленных верхних и нижних границ слоев можно использовать для определения более точного направления при геонавигации, чтобы управлять направлением бурения.
На фиг. 1А представлена для примера скважинная система 100а. Приведенная для примера скважинная система 100а включает в себя систему 108 каротажа удельного сопротивления и подземную область 120 ниже земной поверхности 106. Скважинная система может включать в себя дополнительные или другие элементы, которые не показаны на фиг. 1А. Например, скважинная система 100а может включать в себя дополнительные компоненты системы бурения, компоненты системы каротажа с зондом на кабеле и т.д.
Подземная область 120 может включать в себя все подземные пласты или часть одного или нескольких подземных пластов или зон. Показанная для примера на фиг. 1А подземная область 120 включает в себя многочисленные подземные слои 122 и буровую скважину 104, проходящую через подземные слои 122. Подземные слои 122 могут включать в себя осадочные слои, породные слои, песчаные слои или сочетания подземных слоев этих отдельных типов. В одном или нескольких подземных слоях могут содержаться флюиды, такие как соляной раствор, нефть, газ и т.д. Хотя показанная для примера на фиг. 1А буровая скважина 104 представляет собой вертикальную буровую скважину, систему 108 каротажа удельного сопротивления можно реализовывать в буровых скважинах с другими ориентациями. Например, систему 108 каротажа удельного сопротивления можно приспособить для горизонтальных буровых скважин, наклонных буровых скважин, криволинейных буровых скважин, вертикальных буровых скважин или сочетаний их.
Показанная для примера система 108 каротажа удельного сопротивления включает в себя каротажный прибор 102, наземное оборудование 112 и вычислительную подсистему 110. В примере, показанном на фиг. 1А, каротажный прибор 102 представляет собой скважинный каротажный прибор, который работает в то время, когда расположен в буровой скважине 104. Показанное для примера на фиг. 1А наземное оборудование 112 работает на поверхности 106 или выше поверхности, например вблизи устья 105 скважины, осуществляя управление каротажным прибором 102 и, возможно, другим скважинным оборудованием или другими компонентами скважинной системы 100а. Показанная для примера вычислительная подсистема 110 может принимать и анализировать каротажные данные с каротажного прибора 102. Система каротажа удельного сопротивления может включать в себя дополнительные или другие элементы, а элементы системы каротажа удельного сопротивления могут быть скомпонованы и могут работать так, как представлено на фиг. 1А, или иным образом.
В отдельных случаях вся вычислительная подсистема 110 или часть ее может быть реализована как компонент наземного оборудования 112, каротажного прибора 102 или того и другого или может быть объединена в одном или нескольких компонентах наземного оборудования 112 и каротажного прибора 102. В некоторых случаях вычислительная подсистема 110 может быть реализована как одна или несколько дискретных структур вычислительных систем, отделенных от наземного оборудования 112 и каротажного прибора 102. Вычислительная подсистема 110 может быть показанной для примера на фиг. 2 вычислительной системой 200 или может включать в себя эту систему, может быть вычислительной аппаратурой других видов или сочетанием видов.
В некоторых реализациях вычислительная подсистема 110 встроена в каротажный прибор 102 и вычислительная подсистема 110 и каротажный прибор 102 могут работать согласованно в то время, когда расположены в буровой скважине 104. Например, хотя в примере, показанном на фиг. 1А, вычислительная подсистема 110 показана над поверхностью 106, вся вычислительная подсистема 110 или часть ее может находиться ниже поверхности 106, например на месте нахождения каротажного прибора 102 или вблизи него.
Скважинная система 100 может включать в себя связное или телеметрическое оборудование, которое обеспечивает связь между вычислительной подсистемой 110, каротажным прибором 102 и другими компонентами системы 108 каротажа удельного сопротивления. Например, каждый из компонентов системы 108 каротажа удельного сопротивления может включать в себя один или несколько приемопередатчиков или аналогичных устройств для проводной или беспроводной передачи данных между различными компонентами. Например, система 108 каротажа удельного сопротивления может включать в себя системы и аппаратуру для телеметрии по каротажному кабелю, телеметрии по снабженной проводом трубе, телеметрии по гидроимпульсному каналу связи, акустической телеметрии, электромагнитной телеметрии или сочетания этих отдельных видов телеметрии. В некоторых случаях каротажный прибор 102 принимает команды, сигналы состояния или информацию других видов с вычислительной подсистемы 110 или другого источника. В некоторых случаях вычислительная подсистема 110 принимает каротажные данные, сигналы состояния или информацию других видов с каротажного прибора 102 или другого источника.
Операции каротажа удельного сопротивления можно выполнять в сочетании со скважинными операциями различных видов на разных этапах во время эксплуатации скважинной системы. Многие структурные атрибуты и компоненты наземного оборудования 112 и каротажного прибора 102 зависят от ситуации, в которой выполняются операции каротажа удельного сопротивления. Например, каротаж удельного сопротивления можно выполнять во время операций бурения, во время каротажа с зондом на кабеле или в других ситуациях. В связи с этим наземное оборудование 112 и каротажный прибор 102 могут включаться в состав бурового оборудования, оборудования каротажа с зондом на кабеле или другого оборудования для операций других видов или же могут работать в сочетании с этим оборудованием.
В некоторых примерах операции каротажа удельного сопротивления выполняются во время операций каротажа с зондом на кабеле. На фиг. 1В показана для примера скважинная система 100b, которая включает в себя прибор 102 каротажа удельного сопротивления в конфигурации каротажа с зондом на кабеле. В некоторых примерах операций каротажа с зондом на кабеле наземное оборудование 112 включает в себя платформу над поверхностью 106, снабженную буровой вышкой 132, которая поддерживает каротажный кабель 134, который продолжается в буровую скважину 104. Например, операции каротажа с зондом на кабеле можно выполнять после подъема бурильной колонны из буровой скважины 104, чтобы иметь возможность спускать кабельный каротажный прибор 102 на тросе или каротажном кабеле в буровую скважину 104.
В некоторых примерах операции каротажа удельного сопротивления выполняют во время операций бурения. На фиг. 1С показана для примера скважинная система 100с, которая включает в себя прибор 102 каротажа удельного сопротивления в ситуации каротажа во время бурения (КВБ). Бурение обычно осуществляют при использовании колонны бурильных труб, соединенных друг с другом для образования бурильной колонны 140, которую спускают через роторный стол в буровую скважину 104. В некоторых случаях буровая установка 142 на поверхности 106 поддерживает бурильную колонну 140, когда бурильная колонна 140 пробуривает скважину, проходящую в подземную область 120. Бурильная колонна может включать в себя, например, ведущую трубу, бурильные трубы, компоновку низа бурильной колонны и другие компоненты. Компоновка низа бурильной колонны на бурильной колонне может включать в себя утяжеленные бурильные трубы, буровые долота, каротажный прибор 102 и другие компоненты. Каротажные приборы могут включать в себя приборы измерений в процессе бурения (ИПБ), приборы каротажа во время бурения и другие.
В некоторых примерах реализаций каротажный прибор 102 включает в себя прибор измерения удельного сопротивления пласта, предназначенный для получения измерений удельного сопротивления из подземной области 120. Например, как показано на фиг. 1В, каротажный прибор 102 может быть подвешен в буровой скважине 104 на каротажном кабеле, гибких насосно-компрессорных трубах и другой структуре, которая соединяет прибор с наземным блоком управления или другими компонентами наземного оборудования 112. В некоторых примерах реализаций каротажный прибор 102 спускают в нижнюю часть представляющей интерес области и затем вытягивают вверх (например, с по существу постоянной скоростью) через представляющую интерес область. Например, как показано на фиг. 1С, каротажный прибор 102 может быть развернут в буровой скважине 104 на сочлененной бурильной трубе, снабженной проводом бурильной трубе или другом средстве развертывания. В некоторых примерах реализаций каротажный прибор 102 собирает данные во время операций бурения, когда во время выполнения операций бурения он перемещается вниз через представляющую интерес область.
В некоторых примерах реализаций каротажный прибор 102 в буровой скважине 104 собирает данные в дискретных точках каротажа. Например, каротажный прибор 102 можно перемещать шагами вверх или вниз до каждой точки каротажа на ряде глубин в буровой скважине 104. В каждой точке каротажа измерительные приборы в каротажном приборе 102 (например, излучатели и приемники, показанные на фиг. 3) выполняют измерения в подземной области 120. Данные измерений могут передаваться к вычислительной подсистеме 110 для сохранения, обработки и анализа. Такие данные оценки пласта можно собирать и анализировать во время операций бурения (например, в течение каротажа во время бурения (КВБ)), во время операций каротажа с зондом на кабеле или во время работ других видов.
Вычислительная подсистема 110 может принимать и анализировать данные измерений с каротажного прибора 102 для обнаружения подземных слоев 122. Например, вычислительная подсистема 110 может идентифицировать положения границ и другие свойства подземных слоев 122 на основании измерений удельного сопротивления, регистрируемых каротажным прибором 102 в буровой скважине 104. Например, в некоторых случаях более высокое удельное сопротивление указывает на более высокую вероятность наличия залежи углеводородов.
В некоторых случаях положения границ подземных слоев 122 обнаруживают на основании анализа расстояния до границы слоя (РГС). Например, система 108 каротажа удельного сопротивления может определять расстояние до границы каждого подземного слоя 122 от опорной точки на каротажном приборе 102. Опорная точка на каротажном приборе 102 может представлять, например, глубину буровой скважины в осевом центре или вблизи осевого центра группы излучателей и приемников в каротажном приборе 102 или глубину буровой скважины на другом месте. Например, граница каждого подземного слоя 122 может представлять глубину буровой скважины, на которой подземные слои 122 пересекают буровую скважину 104.
В некоторых реализациях каротажный прибор 102 включает в себя многочисленные антенны, каждая из которых работает как излучатель или приемник. В излучающих антеннах можно использовать переменные токи для генерации электромагнитного поля, которое может наводить вихревой ток в окружающей области. Вихревой ток может создавать магнитное поле, которое может обнаруживаться приемными антеннами в каротажном приборе 102.
Каротажные приборы согласно некоторым примерам включают в себя многочисленные излучатели и многочисленные приемники, при этом каждый излучатель и каждый приемник находится на отдельном месте вдоль продольной оси каротажного прибора. Многочисленные приемники могут обнаруживать отклик на основании сигнала от одного излучателя. Сигналы, принимаемые двумя разнесенными приемниками, могут иметь различные фазы и амплитуды.
В отдельных случаях некоторые или все излучатели и приемники в одном каротажном приборе могут работать на многочисленных электромагнитных частотах. Измерения, получаемые с помощью излучателей и приемников, работающих на многочисленных частотах и при многочисленных разносах, могут обеспечить гибкость и другие преимущества при обнаружении свойств пласта. На диапазон чувствительности могут оказывать влияние пласт, структура прибора или другие факторы.
Различные аспекты подземной области 120 могут влиять на измерения удельного сопротивления, получаемые каротажным прибором 102. Например, анизотропия пласта, угол падения пласта, расстояния до границ и другие факторы могут оказывать значительное влияние на скважинные измерения удельного сопротивления, и в системе 108 каротажа удельного сопротивления эти параметры могут учитываться для получения точных оценок удельного сопротивления пласта и положения.
В отдельных случаях в вычислительной подсистеме 110 согласно примеру используется способ инверсии для получения информации о параметрах пласта на основании данных измерений удельного сопротивления, получаемых каротажным прибором 102. В способах инверсии согласно некоторым примерам осуществляется поиск оптимума или же приемлемого соответствия между модельными данными и измерениями. Модельные данные можно получать в предположении определенных параметров пласта, включая горизонтальное удельное сопротивление, вертикальное удельное сопротивление, угол падения, положение границы и т.д.
В некоторых случаях в системе 108 каротажа удельного сопротивления согласно примеру может быстро, в реальном времени, вычисляться расстояние до границы. Например, в ситуации бурения положение текущей точки каротажа может быть важным для принятия решений на буровой площадке относительно бурения. Когда удельное сопротивление пласта известно, код одномерной (1М) инверсии позволяет получать расстояние до границ слоя (РГС) и может давать результат инверсии, когда имеются достаточные измерения.
Способами инверсии согласно некоторым примерам два неизвестных расстояния (например, расстояния до верхней и нижней границ) можно определять на основании по меньшей мере двух различных исходных измерений с каротажного прибора 102. Например, два исходных измерения могут быть необходимы для снижения неопределенности. В некоторых случаях каротажный прибор 102 получает два или большее количество исходных измерений на одном месте каротажа в буровой скважине 104 и передает все исходные измерения в вычислительную подсистему 110 для анализа (например, для вычислений расстояний до границ слоев).
Способом инверсии можно идентифицировать границы многочисленных прилегающих подземных слоев на основании данных, получаемых на одной глубине погружения прибора. Такие способы одномерной инверсии можно использовать для идентификации параметров подземного пласта на основании измерений, получаемых направленным прибором измерения удельного сопротивления. В таких одноточечных способах инверсии операции могут выполняться на основании входных данных, которые включают в себя многочастотные измерения при многочисленных разносах, получаемые направленным прибором измерения удельного сопротивления.
В некоторых примерах реализаций итерационным алгоритмом можно получать профиль многослойного пласта на основании данных, регистрируемых в одной точке каротажа. При каждой итерации можно использовать измерения в другом диапазоне чувствительности. Инверсию можно начинать, например, с простой модели небольшого числа слоев для уменьшения сложности, уменьшения времени вычислений, для повышения точности или для получения любого сочетания этих и других преимуществ. Границы в пределах первых слоев можно идентифицировать на основании измерений в небольшом диапазоне чувствительности. Другие слои можно добавлять при использовании измерений с возрастающим диапазоном чувствительности для обращения более отдаленных целевых слоев. Корректирующую обработку можно применять к обращенному результату (например, после каждого этапа инверсии или в других случаях), например, для исключения артефактов (например, эффекта фальшивого слоя).
На фиг. 2 представлена для примера структура вычислительной системы 200. Вычислительную систему 200 согласно примеру можно использовать в качестве вычислительной подсистемы 110 из фиг. 1А или вычислительную систему 200 согласно примеру можно использовать иным образом. В некоторых случаях вычислительная система 200 согласно примеру может работать в сочетании со скважинной системой (например, скважинной системой 100а из фиг. 1А) и может быть расположена в одной или вблизи одной или нескольких скважин скважинной системы или на удаленном месте. Вся вычислительная система 200 или часть ее может работать независимо от скважинной системы.
Показанная для примера на фиг. 2 вычислительная система включает в себя запоминающее устройство 150, процессор 160 и контроллер 170 ввода/вывода, с возможностью передачи данных соединенные шиной 165. Запоминающее устройство 150 может включать в себя, например, оперативное запоминающее устройство (ОЗУ), устройство хранения данных (например, доступное для записи постоянное запоминающее устройство (ПЗУ) или другие), жесткий диск или носитель данных другого вида. Вычислительную подсистему 110 можно предварительно программировать или ее можно программировать (и перепрограммировать) путем загрузки программы из другого источника (например, с компакт-диска, доступного только для чтения, из другого вычислительного устройства через сеть передачи данных или иным образом).
В некоторых примерах контроллер 170 ввода/вывода соединен с устройствами ввода/вывода (например, монитором 175, мышью, клавиатурой или другими устройствами ввода/вывода) и с линией 180 связи. Устройства ввода/вывода принимают и передают данные в аналоговой или цифровой форме по линиям связи, таким как линия последовательной передачи, беспроводная линия (например, инфракрасная, радиочастотная или другие), линия параллельной передачи или линия другого вида.
Линия 180 связи может включать в себя канал связи любого вида, соединитель, сеть передачи данных или другую линию. Например, линия 180 связи может включать в себя беспроводную или проводную сеть, локальную сеть (ЛС), глобальную сеть (ГС), частную сеть, сеть общего пользования (такую как Интернет), сеть Wi-Fi, сеть, которая включает в себя спутниковую сеть, или сеть передачи данных другого вида.
В запоминающем устройстве 150 могут сохраняться инструкции (например, компьютерный код), связанные с операционной системой, компьютерными приложениями и другими ресурсами. Кроме того, в запоминающем устройстве 150 могут сохраняться прикладные данные и объекты данных, которые могут интерпретироваться одним или несколькими приложениями или виртуальными машинами, выполняемыми в вычислительной системе 200. Как показано на фиг. 2, приведенное для примера запоминающее устройство 150 включает в себя каротажные данные 151, данные 152 о слоях, другие данные 153 и приложения 154. Данные и приложения могут сохраняться в запоминающем устройстве 150 в любой подходящей форме или любом формате.
Каротажные данные 151 могут включать в себя измерения и другие данные с каротажного прибора. В некоторых случаях каротажные данные 151 включают в себя одно или несколько измерений для каждой из многочисленных различных точек каротажа в буровой скважине. Например, точка каротажа, связанная с данным измерением, может быть местом нахождения опорной точки каротажного прибора при регистрации данного измерения. Каждое измерение может включать в себя данные, получаемые одной или несколькими парами излучатель-приемник, работающими на одной или нескольких сигнальных частотах. Каждое измерение может включать в себя данные, получаемые многочисленными парами излучатель-приемник, работающими при одном или нескольких разносах излучателя и приемника. Каротажные данные 151 могут включать в себя информацию, идентифицирующую разнос излучателя и приемника, связанный с каждым измерением.
Данные 152 о слоях могут включать в себя информацию относительно подземных слоев. Например, данные 152 о слоях могут включать в себя информацию, описывающую удельное сопротивление, размер, глубину, объем, геометрию, площадное распространение, пористость, давление и другую информацию относительно подземного слоя. В некоторых реализациях данные 152 о слоях включают в себя информацию, получаемую механизмом инверсии. Например, данные 152 о слоях могут включать в себя информацию о расстоянии до границы слоя, получаемую на основании измерений удельного сопротивления, и другую информацию из каротажных данных 151. В соответствии с этим данные 152 о слоях могут включать в себя информацию, связанную с одной или несколькими точками каротажа. Например, данные 152 о слоях могут включать в себя расстояние от точки каротажа до одной или нескольких границ слоя.
Другие данные 153 могут включать в себя другую информацию, которая используется, образуется или иным образом связана с приложениями 154. Например, другие данные 153 могут включать в себя модельные данные или другую информацию, которая может использоваться механизмом инверсии для получения данных 152 о слоях на основании каротажных данных 151.
Приложения 154 могут включать в себя программные приложения, сценарии, программы, функции, выполняемые файлы или другие модули, которые интерпретируются или выполняются процессором 160. Например, приложения 154 могут включать в себя механизм инверсии и модули других видов. Приложения 154 могут включать в себя машиночитаемые инструкции для выполнения одной или нескольких операций, связанных с фигурами 8-10.
Приложения 154 могут получать входные данные, такие как каротажные данные, данные моделирования или входные данные других видов из запоминающего устройства 150, из другого локального источника или из одного или нескольких удаленных источников (например, по линии 180 связи). Приложения 154 могут создавать выходные данные и сохранять выходные данные в запоминающем устройстве 150, на другом локальном носителе или в одном или нескольких удаленных устройствах (например, при осуществлении передачи выходных данных по линии 180 связи).
Процессор 160 может исполнять инструкции, например, для образования выходных данных на основании входных данных. Например, процессор 160 может прогонять приложения 154 путем выполнения или интерпретации программного обеспечения, сценариев, программ, функций, исполняемых файлов и других модулей, содержащихся в приложениях 154. Процессор 160 может выполнять одну или несколько операций, связанных с фигурами 8-10. Входные данные, принимаемые процессором 160, или выходные данные, образуемые процессором 160, могут включать в себя любые из каротажных данных 151, данных 152 о слоях или другие данные 153.
На фиг. 3 представлен для примера вид прибора 300 каротажа удельного сопротивления. Прибор 300 каротажа удельного сопротивления согласно примеру можно использовать в системе 108 каротажа удельного сопротивления, показанной на фиг. 1А, например, в качестве каротажного прибора 102, в качестве компонента каротажного прибора 102 или иным образом. Приведенный для примера прибор 300 каротажа удельного сопротивления можно использовать в системах других видов (включая системы каротажа удельного сопротивления других видов) или в других ситуациях (например, в скважинных системах других видов).
В общем случае направленный прибор каротажа удельного сопротивления имеет некоторое количество (N) наклоненных или соосных излучающих антенн T1, T2, T3, …, TN, разнесенных вдоль прибора, и некоторое количество (N') наклоненных или соосных приемных антенн R1, R2, R3, …, RN', которые в осевом направлении отнесены от излучающих антенн и друг от друга. В отдельных случаях после размещения прибора каротажа удельного сопротивления в буровой скважине прибор можно поворачивать и собирать измерения на приемниках при возбуждении разнесенных излучателей от многочастотного источника тока. Измерения, регистрируемые направленным прибором каротажа удельного сопротивления на различных частотах и при различных разносах, могут иметь различные чувствительности к параметрам пласта и различные способности к обнаружению даже применительно к одному и тому же параметру. В отдельных случаях при больших разносах излучателей и приемников выполняют глубинные измерения удельного сопротивления на границе прилегающего слоя, тогда как при небольших разносах излучателей и приемников получают точную информацию относительно локальной зоны.
Пример прибора 300 каротажа удельного сопротивления является одним примером направленного прибора каротажа удельного сопротивления. Прибор 300 каротажа удельного сопротивления согласно примеру включает в себя корпус 303 прибора, шесть излучателей 302а, 302b, 302c, 302d, 302e, 302f и три приемника 304a, 304b, 304c. Прибор каротажа удельного сопротивления может включать в себя дополнительные элементы, такие как, например, аппаратура обработки данных для управления работой излучателей и приемников, источник питания для снабжения электроэнергией излучателей и приемников, вычислительная подсистема для обработки данных с излучателей и приемников, телеметрическая система для обмена данными с внешними системами и т.д. Прибор каротажа удельного сопротивления может включать в себя иное количество излучателей, иное количество приемников или тех и других, а излучатели и приемники могут быть скомпонованы так, как показано на фиг. 3, или могут иметь компоновку другого вида.
Корпус 303 прибора может включать в себя структуры, компоненты или узлы для поддержания излучателей, приемников и, возможно, других компонентов прибора 300 каротажа удельного сопротивления. Корпус 300 прибора может быть соединен с другими компонентами системы каротажа удельного сопротивления, такими как, например, бурильный узел, узел на каротажном кабеле или компонент другого типа. Показанный для примера на фиг. 3 корпус 303 прибора имеет продольную ось прибора 300 каротажа удельного сопротивления, а каждый излучатель или приемник закреплен на особом месте вдоль продольной оси.
Во время работы корпус 303 прибора может перемещаться в буровой скважине, проходя мимо ряда точек каротажа. В каждой точке каротажа некоторые или все излучатели и приемники могут работать на одной или нескольких сигнальных частотах для сбора данных об удельном сопротивлении, которые могут обрабатываться в приборе 300 каротажа удельного сопротивления, передаваться к другой системе для обработки или обрабатываться и передаваться.
В рассмотрении, которое следует ниже, излучатели 302a, 302b, 302c, 302d, 302e и 302f обозначены как T1, T2, T3, T3', T2' и T1' соответственно, и приемники 304a, 304b и 304с обозначены как R1, R2 и R3 соответственно. В общем случае излучающие элементы и приемные элементы можно располагать под любым углом относительно продольной оси прибора 300 каротажа удельного сопротивления. В примере, показанном на фиг. 3, ось каждого из излучателей T1, T2, T3, T3', T2' и T1' совпадает с продольной осью, а приемные элементы R1, R2 и R3 наклонены под углом 45° относительно продольной оси. В некоторых случаях излучатели могут быть наклонены, а оси приемников могут совпадать с продольной осью; и в некоторых случаях все излучатели и приемники наклонены, а углы наклона излучателей и приемников могут быть одинаковыми или различными. В дополнение к этому функции излучателей и приемников могут быть взаимозаменяемыми. Можно использовать другие конфигурации излучающих элементов и приемных элементов.
Разнос антенн вдоль продольной оси можно задавать в зависимости от параметра x длины. В некоторых реализациях примера прибора 300 каротажа удельного сопротивления параметр x длины равен 16 дюймам (40,6 см); можно использовать другое значение параметра длины. В примере, показанном на фиг. 3, при измерении вдоль продольной оси от средней точки между центрами приемных антенн R1 и R2 излучатели T3 и T3' расположены на местах ±1x (например, ±16 дюймов (±40,6 см)), излучатели T2 и T2' расположены на местах ±2x (например, ±32 дюйма (±81,2 см)) и излучатели T1 и T1' расположены на местах ±3x (например, ±48 дюймов (±1,22 м)); приемные антенны R1 и R2 расположены на местах ±x/4 (например, ±4 дюйма (±10,16 см)) и приемная антенна R3 расположена на месте -4x (например, -64 дюйма (-1,63 м)). Излучатели и приемники можно размещать на других местах.
По желанию параметр длины и коэффициенты разноса можно изменять, чтобы обеспечивать большую или меньшую глубину исследования, более высокое пространственное разрешение или более высокое отношение сигнала к шуму. При использовании показанного разноса симметричные измерения удельного сопротивления можно выполнять при разносах 1x, 2x и 3x между парами R1-R2 наклоненных приемных антенн и соответствующими излучателями в каждой из одинаково разнесенных пар T1-T1'; T2-T2'; T3-T3'. В дополнение к этому асимметричные измерения удельного сопротивления можно выполнять при использовании разносов 1x, 2x, 3x, 5x, 6x и 7x между наклоненной приемной антенной R3 и соответствующими излучателями T1, T2, T3, T3', T2' и T1'. В некоторых случаях эта конфигурация разносов обеспечивает эксплуатационную гибкость, возможность выполнения глубинных (но асимметричных) измерений при обнаружении границы слоя и симметричных измерений для точного определения азимутального удельного сопротивления.
Согласно некоторым аспектам работы каждый из шести излучателей T1, T2, T3, T3', T2' и T1' можно возбуждать по очереди и можно измерять фазу и амплитуду результирующего напряжения, наводимого на каждую из трех приемных рамок R1, R2 и R3. Измерения на протяжении полного поворота (поворота на 360°) можно регистрировать в то время, когда прибор поворачивается на определенном месте каротажа в буровой скважине. Измерения, распределенные на протяжении 360°, можно разделять на М элементов разрешения, где каждый элемент разрешения охватывает угол 360/М градусов. Первый элемент разрешения (элемент 1 разрешения) может представлять измерение в верхнем правом направлении, перпендикулярном продольной оси каротажного прибора. Например, если суммарное число элементов разрешения равно 32, то семнадцатый элемент разрешения (элемент 17 разрешения) находится в противоположном (обратном) направлении относительно элемента 1 разрешения. На основании этих измерений или сочетания этих измерений можно определять удельное сопротивление пласта.
Поскольку отклик наклоненных антенн является азимутально чувствительным, то в некоторых реализациях геологический сигнал, вычисляемый для элемента разрешения, можно использовать в качестве показателя границы слоя. В примере функции вычисления геологического сигнала используется разность между фазой или логарифмом амплитуды для текущего элемента разрешения и средней фазой или логарифмом амплитуды для всех элементов разрешения в данном осевом положении в буровой скважине:
 ,
,
 .
.
В уравнениях (1) и (2), приведенных выше, “geo” означает геологический сигнал, “att” обозначает затухание, “pha” обозначает фазу, “A” обозначает амплитуду напряжения, “ϕ” обозначает фазу напряжения, “R” обозначает приемник и “T” обозначает излучатель. Например, geo_attRIT1(k) обозначает затухание геологического сигнала из измерения в k-м элементе разрешения на приемнике R1, возбуждаемом Т1, и geo_phaRIT1(k) обозначает фазу геологического сигнала из измерения в k-м элементе разрешения на приемнике R1, возбуждаемом Т1. Значения geo_pha представлены в единицах градусов и значения geo_att представлены в единицах децибел (дБ).
Уравнениями (1) и (2), приведенными выше, показан пример вычислений геологических сигналов, которые позволяют получать скважинное измерение удельного сопротивления на основании данных, регистрируемых при работе одного излучателя и пары приемников. Уравнения других видов можно использовать для получения скважинного измерения удельного сопротивления, а скважинное измерение удельного сопротивления можно получать на основании данных, регистрируемых при работе одного излучателя и пары приемников, или на основании данных, регистрируемых при работе многочисленных излучателей и пары приемников.
Например, компенсированное скважинное измерение удельного сопротивления можно получать усреднением (или другим сочетанием) данных, регистрируемых многочисленными симметричными парами излучатель-приемник. Пары излучатель-приемник могут включать в себя один излучатель и многочисленные приемники, один приемник и многочисленные излучатели или многочисленные излучатели и многочисленные приемники. В каждой паре излучатель-приемник, используемой для получения скважинного измерения удельного сопротивления, может иметься одно и то же расстояние между излучателем и приемником или же данные при многочисленных расстояниях между излучателями и приемниками могут использоваться для получения скважинных измерений удельного сопротивления. Пример компенсированного измерения амплитуды αс представлен ниже:
Компенсированные или некомпенсированные скважинные измерения удельного сопротивления других видов можно получать на основании данных, регистрируемых при работе одной или нескольких пар излучатель-приемник прибора каротажа удельного сопротивления.
В некоторых реализациях измерения показанным для примера на фиг. 3 прибором 300 каротажа удельного сопротивления могут включать в себя измерения, связанные с разносами излучателя и приемника (И-П) 16 дюймов (40,6 см), 32 дюйма (81,2 см), 48 дюймов (1,22 м), 80 дюймов (2,03 м), 96 дюймов (2,44 м) и 112 дюймов (2,84 м). Азимутальную ориентацию прибора можно измерять от верхней части буровой скважины или можно вычислять по измеряемым данным. При известном азимутальном угле смещение кривой можно использовать для получения скважинного измерения при нулевом азимуте. В связи с этим в различных аспектах этого рассмотрения азимутальная ориентация предполагается известной, но рассмотрение можно приспособить для других сценариев.
В некоторых реализациях один или несколько геологических сигналов образуются в приборе 300 каротажа удельного сопротивления (например, с помощью одного или нескольких процессоров в приборе 300 каротажа удельного сопротивления) на основании сигналов, регистрируемых с помощью излучателей и приемников, или же геологические сигналы могут образовываться вне прибора 300 каротажа удельного сопротивления. Вычислительная система (например, вычислительная подсистема 110 из фиг. 1А) может иметь доступ к образуемым геологическим сигналам и выполнять вычисление расстояния до границы пласта на основании геологических сигналов. Например, вычислительная система может выполнять способ инверсии, при которой многочисленные геологические сигналы воспринимаются как входные данные. Способом инверсии можно идентифицировать положения одной или нескольких границ подземного слоя и другие свойства подземной области.
На фиг. 4 представлена схема приведенной в качестве примера модели 400 подземного пласта, используемой при численном моделировании. Модель 400 подземного пласта согласно примеру включает в себя слоистый пласт в подземной области 408 и координатную ось 410, которая представляет продольную ось прибора каротажа удельного сопротивления (например, ось z на фиг. 6). В подземной области 408, показанной на фиг. 4, каждый из слоев пласта имеет угол падения относительно координатной оси 410. Угол падения может составлять, например, 80° или может иметь другое значение.
Модель 400 подземного пласта согласно примеру включает в себя пять подземных слоев 412a, 412b, 412c, 412d, 412e, при этом каждый подземный слой прилегает к одному или двум соседним подземным слоям и имеет общую границу с ними. Средний подземный слой 412с прилегает к соседним подземным слоям 412b, 412d и имеет общую границу с ними; подземный слой 412b прилегает к соседним подземным слоям 412а, 412с и имеет общую границу с ними; подземный слой 412d прилегает к соседним подземным слоям 412с, 412е и имеет общую границу с ними.
На представленной для примера на фиг. 4 схеме показаны положения двух излучающих антенн 402a, 402b и приемной антенны 404 вдоль продольной оси прибора каротажа удельного сопротивления. Расстояние между первой излучающей антенной 402а и приемником 404 определяет первый разнос излучателя и приемника; и расстояние между второй излучающей антенной 402b и приемником 404 определяет второй, меньший, разнос излучателя и приемника.
На фиг. 4 показаны диапазоны чувствительности взятых для примера пар излучатель-приемник для примерного режима работы (например, для примерной рабочей частоты и т.д.). Первая пара излучатель-приемник (излучающая антенна 402а и приемная антенна 404) имеют больший разнос излучателя и приемника и поэтому больший диапазон чувствительности, представленный точкой 422а на оси 420а. Вторая пара излучатель-приемник (излучающая антенна 402b и приемная антенна 404) имеет меньший разнос излучателя и приемника и поэтому меньший диапазон чувствительности, представленный точкой 422b на оси 420b.
Как показано на фиг. 4, соответствующие ближний и дальний слои могут оказывать более сильное или более слабое влияние на одно и то же измерение. Например, диапазон чувствительности второй пары излучатель-приемник продолжается до ближнего слоя 412d, а ближний слой 412d оказывает более сильное влияние на измерение, относящееся к меньшему разносу излучателя и приемника; и диапазон чувствительности второй пары излучатель-приемник продолжается до дальнего слоя 412е, а дальний слой 412е оказывает более сильное влияние на измерения, связанные с большим разносом излучателя и приемника. В некоторых случаях дальний слой 412е может оказывать незначительное влияние на измерение, связанное с меньшим разносом излучателя и приемника.
В способе инверсии, таком как, например, способы инверсии, представленные на фиг. 9 и 10, могут учитываться различные диапазоны чувствительности при разных разносах излучателя и приемника. Например, способом инверсии можно обнаруживать положения границ ближнего слоя 412d по измерениям, образуемым на основании работы второй пары излучатель-приемник (излучающей антенны 402b и приемной антенны 404), когда имеется меньший разнос излучателя и приемника; и способом инверсии можно обнаруживать положения границ дальнего слоя 412е по измерениям, образуемым на основании работы первой пары излучатель-приемник (излучающей антенны 402а и приемной антенны 404), когда имеется больший разнос излучателя и приемника. В соответствии с этим на основании различных диапазонов чувствительности измерения, связанные с различными разносами излучателя и приемника, можно использовать для раздельной идентификации подземных слоев на различных глубинах.
На фиг. 5 представлена для примера система 500 координат. В частности, на фиг. 5 представлен схематичный перспективный вид прямоугольной системы координат осадочного подземного пласта. В некоторых случаях подземные слои (например, слои, образованные осадочной постройкой, или слои других типов) не перпендикулярны к буровой скважине скважинной системы. Например, буровая скважина 104 на фиг. 1А может быть пробурена под углом относительно нормали к подземным слоям 122. Угол может быть результатом направленного бурения, естественного угла падения или простирания подземных слоев или сочетания других факторов.
В некоторых реализациях при измерениях удельного сопротивления и ориентации пласта удобно использовать систему 500 координат пласта, показанную на фиг. 5. Кроме того, можно использовать другие системы координат. На фиг. 5 показан участок осадочного слоя пласта, при этом ось z ориентирована перпендикулярно к плоскости пласта в направлении аккреции. В падающем слое ось x можно выбирать ориентированной в направлении самого глубокого спуска (например, вниз по склону) или можно выбирать другую ориентацию.
Горизонтальное удельное сопротивление (которое можно представить как Rx, Ry или сочетанием их) представляет собой удельное сопротивление в направлении плоскости x-y, а вертикальное удельное сопротивление (Rz) представляет собой удельное сопротивление в направлении оси z. В электрически изотропном пласте горизонтальное удельное сопротивление и вертикальное удельное сопротивление равны, тогда как в электрически анизотропном пласте горизонтальное и вертикальное удельные сопротивления могут быть различными.
На фиг. 6 представлена диаграмма, показывающая зависимости между системами координат. В частности, на фиг. 6. показана зависимость между системой координат буровой скважины и системой координат падающего слоя пласта (например, системой 500 координат пласта, показанной на фиг. 5). В примере, показанном на фиг. 6, осями x, y и z задается система координат буровой скважины, а оси x′′, y′′ и z′′ представляют систему координат пласта. Ось z системы координат буровой скважины совмещена с продольной осью буровой скважины, а ось x системы координат буровой скважины может быть направлена к северной стороне буровой скважины, высокой стороне буровой скважины, или в другом направлении. В некоторых случаях продольная ось прибора каротажа удельного сопротивления лежит в плоскости, имеющей азимутальный угол относительно разметочной линии передней поверхности прибора.
В примере, показанном на фиг. 6, две системы координат, (x, y, z) и (x′′, y′′, z′′), связаны двумя поворотами. Начиная с системы (x, y, z) буровой скважины первый поворот на угол γ выполняется вокруг оси z. Результирующая система координат обозначена на фиг. 6 как (x', y', z'). Угол γ может быть углом относительного простирания, который показывает направление падения пласта относительно системы координат буровой скважины. Затем выполняется второй поворот на угол δ вокруг оси y' для попадания в систему координат пласта, которая на фиг. 6 обозначена как (x′′, y′′, z′′). Этим система координат пласта совмещается с системой координат буровой скважины. Угол δ может быть относительным углом падения, который показывает угол между продольной осью прибора каротажа удельного сопротивления и нормалью слоев пласта.
На фиг. 7 представлена диаграмма, показывающая пример угловых элементов разрешения каротажа удельного сопротивления в координатной плоскости 700. Прибором каротажа удельного сопротивления можно получать измерения для всего диапазона азимутальных углов (например, в пределах поворота на 360°) путем поворота прибора вокруг продольной оси на определенном месте каротажа в буровой скважине. Измерения можно разделять на N элементов разрешения, при этом каждый элемент разрешения охватывает угол 360/N градусов. В примере, показанном на фиг. 7, первый элемент разрешения представлен как β1, второй элемент разрешения представлен как β2 и т.д. Положения границ подземных слоев можно идентифицировать на основании данных, соответствующих одному элементу разрешения или сочетанию многочисленных элементов разрешения.
На фиг. 8 представлены снимки с экрана, которые включают в себя три графика 810, 820, 830, показывающих примеры модельных данных каротажа удельного сопротивления. Горизонтальной осью на каждом из графиков 810, 820, 830 представлен диапазон отклонения в трехслойном пласте в системе координат буровой скважины. Кривой 812 на первом графике 810 показана зависимость между системами координат, представленными на фиг. 6; вертикальной осью на первом графике 810 представлена истинная вертикальная глубина (ИВГ) в трехслойном пласте в системе координат пласта. Штриховкой справочной колонки первого графика 810 показаны положения трех подземных слоев, которые были использованы для моделирования данных, представленных на фиг. 8. Средний подземный слой (который находится в пределах от 510 футов (155,4 м) до 530 футов (161,5 м)) моделировался при удельном сопротивлении 20 Ом; каждый из верхнего и нижнего слоев (по каждую сторону от среднего слоя) моделировался при удельном сопротивлении 5 Ом.
На втором графике 820 показана зависимость удельного сопротивления от отклонения, основанная на моделированных скважинных измерениях удельного сопротивления, связанных с тремя различными разносами излучателя и приемника (И-П), на рабочей частоте 500 кГц. Первой кривой 822 показано удельное сопротивление, основанное на измерении при разносе излучателя и приемника на 48 дюймов (1,22 м), второй кривой 824 показано удельное сопротивление, основанное на измерении при разносе излучателя и приемника на 32 дюйма (0,81 м), и третьей кривой 826 показано удельное сопротивление, основанное на измерении при разносе излучателя и приемника на 16 дюймов (0,4 м).
На третьем графике 830 показана зависимость геологического сигнала от отклонения, основанная на моделированных скважинных измерениях удельного сопротивления для каждого из трех разносов излучателя и приемника (И-П) на рабочей частоте 500 кГц. Первой кривой 832 показан измеренный геологический сигнал при разносе излучателя и приемника на 48 дюймов (1,22 м), второй кривой 834 показан измеренный геологический сигнал при разносе излучателя и приемника на 32 дюйма (0,81 м) и третьей кривой 836 показан геологический сигнал, связанный с разносом излучателя и приемника на 16 дюймов (0,4 м).
Как показано на втором и третьем графиках 820, 830, для удельного сопротивления и геологического сигнала при разносе излучателя и приемника на 48 дюймов (1,22 м) имеется большая дальность обнаружения, тогда как для удельного сопротивления и геологического сигнала при разносе излучателя и приемника на 16 дюймов (0,4 м) имеется меньшая дальность обнаружения. Эти различные диапазоны чувствительности можно использовать для определения положений границ и других свойств подземных слоев на различных глубинах. Например, больший разнос излучателя и приемника можно использовать для обнаружения свойств подземных слоев, находящихся дальше от прибора каротажа удельного сопротивления, а меньший разнос излучателя и приемника можно использовать для обнаружения свойств подземных слоев, находящихся ближе к прибору каротажа удельного сопротивления.
На фиг. 9 представлена диаграмма 900, поясняющая пример способа обнаружения границ подземных слоев на основании данных каротажа удельного сопротивления. На диаграмме 900 из фиг. 9 показаны группа слоев 910, измерения 920 и границы 930. На диаграмме 900 индивидуальные слои помечены R(-n), …, R(-2), R(-1), R(0), R(1), R(2), …, R(n); индивидуальные измерения помечены M(1), M(2), …, M(n); и индивидуальные границы помечены D(-n), …, D(-3), D(-2), D(-1), D(1), D(2), D(3), …, D(n). В качестве примера слои 910 могут представлять собой подземные слои 122, показанные на фиг. 1А, или другие подземные слои.
Каждое из измерений 920 согласно примеру связано с отличающимся разносом излучателя и приемника (И-П). Измерения помечены и расположены в порядке от М(1) при наименьшем разносе излучателя и приемника до M(n) при наибольшем разносе излучателя и приемника. В показанном примере М(1) представляет собой измерение при разносе излучателя и приемника на 16 дюймов (0,4 м), М(2) представляет собой измерение при разносе излучателя и приемника на 32 дюйма (0,81 м); и M(n) представляет собой измерение при разносе излучателя и приемника на 112 дюймов (2,84 м).
Указанный в качестве примера способ инверсии на основе измерений M(1), M(2), …, M(n) можно выполнять итерационно. Например, инверсией первых трех слоев можно идентифицировать границы D(-1), D(1) трех средних слоев R(-1), R(0), R(1) по измерению М(1). Затем в модель добавляют следующие два слоя R(-2), R(2); и границы D(-2), D(2) этих слоев идентифицируют по измерению М(2). Этот процесс можно продолжать итерационно, например, до тех пор пока все измерения не будут использованы, или до удовлетворения другим критериям. В примере, показанном на фиг. 9, границы D(-n), D(n) последних двух слоев R(-n), R(n) идентифицированы по измерению M(n).
Таким образом, как показано примером, представленным на фиг. 9, влияния слоев на измерения при различных разносах излучателя и приемника разделены путем использования каждого измерения для обращения целевого влияющего слоя. В отдельных случаях такими способами инверсии можно получать более точные выходные данные при меньшем времени вычислений по сравнению с некоторыми обычными способами, в которых выполняют инверсию многочисленных слоев на основании всех, вместе взятых измерений.
В способе инверсии, представленном на фиг. 9, и в связанных с ним способах сигнал, используемый для инверсии, можно выбирать на основании структуры и частоты измерения, например, для исключения ввода удельного сопротивления пласта или на основании других факторов. В некоторых примерах полные каротажные данные при различных разносах и частотах измеряют в одной точке каротажа (то есть на одной глубине погружения прибора в буровой скважине). Все измерения от одной и той же пары излучатель-приемник можно определять в одну и ту же группу, а сигналы в одной группе могут иметь различные рабочие частоты.
В некоторых примерах инверсию первых трех слоев (например, слоев R(-1), R(0), R(1)) можно выполнять с использованием измерений при наименьшем разносе излучателя и приемника. Если сигналами не обеспечивается информация, достаточная для обращения неизвестных параметров трехслойной части пласта, сигналы, связанные со вторым наименьшим разносом излучателя и приемника, можно добавлять в инверсию трех слоев. При использовании результата этой инверсии можно графически отображать пласт с текущим слоем и двумя прилегающими слоями.
В некоторых реализациях после инверсии первых трех слоев два более отдаленных слоя (например, слои R(-2), R(2)) добавляют к текущему обращенному пласту, и аналогичную процедуру инверсии становится возможным выполнить на основании измерений со следующей, разнесенной на большее расстояние пары излучатель-приемник. В связи с этим во время второй инверсии пятислойный пласт можно обращать с использованием измерений при двух разносах излучателя и приемника. Процесс можно повторять с прибавлением дополнительных слоев и выполнениям обращения на основании данных, получаемых при постепенно возрастающих разносах излучателя и приемника. Этот процесс можно продолжать, например, итерационным способом для обращения более глубокого пласта до тех пор, пока измерения при всех разносах не будут использованы.
В отдельных случаях одиночной инверсией обеспечивается ложная идентификация слоя и это явление фальшивого слоя можно учитывать включением проверок и соответствующих коррекций в алгоритм инверсии. В некоторых случаях проверками можно идентифицировать ошибочно образованные слои и соответствующую коррекцию можно применить для получения точных данных о пласте. Примеры проверок, которые могут применяться для идентификации ложных слоев, включают в себя проверку очень тонких слоев, проверку слоев, которые имеют такое же (или по существу такое же) удельное сопротивление, какое имеет соседний слой, и другие. В качестве другого примера ложный слой можно идентифицировать на основании положения его относительно других слоев.
Согласно некоторым реализациям в алгоритме инверсии задают максимальное расстояние до границы при каждой субинверсии. Максимальное расстояние может зависеть, например, от глубины исследования входных данных в соответствии с текущим удельным сопротивлением пласта. Например, в отдельных случаях вследствие слабой чувствительности, связанной с разносом при измерении, может не получаться точный результат инверсии для дальних границ. Например, согласно некоторым примерам приборов каротажа удельного сопротивления максимальное расстояние до границы слоя при разносе излучателя и приемника на 16 дюймов (0,4 м) можно положить равным 32 дюймам (0,81 м) или другому значению, и обращенную границу слоя сверх 32 дюймов (0,81 м) при разносе излучателя и приемника на 16 дюймов (0,4 м) можно не учитывать, маркировать как имеющую высокую неопределенность или ненадежную или обрабатывать иным образом. В отдельных случаях такие инверсии можно использовать в пределах дальности обнаружения.
Когда операции контроля слоев в алгоритме инверсии указывают на ложный слой, согласно некоторым реализациям соседние слои можно объединять для формирования единого подземного слоя (а ложный слой можно отбрасывать), который будет более точно представлять физический пласт. Например, ложный слой может образоваться в результате добавления фиксированных слоев в случае выполнения измерений при каждом разносе. Соседние слои можно объединять для удаления ложного слоя, например, когда соседние слои имеют одинаковые или аналогичные удельные сопротивления или когда один из соседних слоев имеет незначительную толщину. Для объединения слоев модель пласта можно обновлять с использованием новой информации о слоях, а расстояние до границ слоев можно пересчитывать на основании новой информации о слоях. В некоторых примерах минимальную толщину слоя можно задавать на основании вертикального разрешения измерения или других факторов.
Когда операции контроля слоя в алгоритме инверсии указывают на ложный слой, согласно некоторым реализациям соседние слои можно переупорядочивать или менять местами. Например, если первый обращенный верхний слой равен 5 футам (1,5 м) при удельном сопротивлении 5 Ом·м и второй обращенный верхний слой равен 4 футам (1,2 м) при удельном сопротивлении 10 Ом·м, модель пласта можно корректировать изменением порядка следования первого и второго слоев. Два или большее количество соседних слоев можно объединять, переупорядочивать или иным образом модифицировать в этих и различных других случаях для повышения точности выходных данных алгоритма инверсии.
На фиг. 10 представлена блок-схема последовательности действий, иллюстрирующая пример способа 1000 идентификации границ подземных слоев. Некоторые или все действия способа 1000 могут быть реализованы одним или несколькими вычислительными устройствами. Например, способ 1000 может быть реализован вычислительной подсистемой 110 из фиг. 1А, вычислительной системой 200 из фиг. 2 или системой другого вида. Некоторые или все действия способа 1000 могут быть реализованы одним или несколькими вычислительными устройствами, которые встроены в каротажный прибор или же работают в соединении с ним. Например, способ 1000 может быть реализован с использованием каротажного прибора 102 из фиг. 1А, прибора 300 каротажа удельного сопротивления из фиг. 3 или прибора другого типа.
В некоторых реализациях способ 1000 может включать в себя небольшое количество дополнительных или других действий, выполняемых в порядке, показанном на фиг. 10, или в ином порядке. Кроме того, одно или несколько отдельных действий или поднаборы действий в способе 1000 можно выполнять отдельно или как часть другого способа. Выходные данные, образуемые в соответствии со способом 1000, в том числе выходные данные, образуемые при выполнении промежуточных действий, могут включать в себя сохраненную, отображенную, напечатанную, переданную, сообщенную или обработанную информацию.
В некоторых реализациях некоторые или все действия способа 1000 выполняются в реальном времени в процессе операции бурения или операции другого вида, выполняемой в скважинной системе. Например, действие может выполняться в реальном времени при выполнении действия в ответ на принимаемые данные (например, с датчика или системы мониторинга) без значительной задержки. Например, действие может выполняться в реальном времени при выполнении действия в ходе мониторинга дополнительных данных. При некоторых действиях в реальном времени могут приниматься входные данные и вырабатываться выходные данные в процессе операций бурения; в отдельных случаях выходные данные доступны в пределах заданного интервала времени, что позволяет оператору (например, человеку или оператору вычислительной машины) реагировать на выходные данные, например, для изменения операции бурения.
В некоторых реализациях прибор каротажа удельного сопротивления можно помещать в буровую скважину, образованную в подземной области, которая включает в себя многочисленные подземные слои. Например, прибор каротажа удельного сопротивления может быть каротажным прибором 102, показанным на фиг. 1А. Прибор каротажа удельного сопротивления может транспортироваться буровой компоновкой, каротажным узлом на кабеле или другим техническим средством. Прибор каротажа удельного сопротивления может работать на многочисленных глубинах погружения прибора в буровой скважине и каждая глубина погружения прибора может представлять отдельную точку каротажа. Способ 1000 можно использовать для выполнения инверсии многочисленных слоев подземной области. Способ 1000 можно выполнять на основании данных из одной точки каротажа или многочисленных точек каротажа. В некоторых случаях способом 1000 можно получать надежные точные выходные данные, основанные на данных, регистрируемых из одной точки каротажа в сложной или разрывной структуре пласта.
На этапе 1002 каротажные данные регистрируют прибором каротажа удельного сопротивления, имеющим излучатели и приемники (И-П), разнесенные на многочисленные различные расстояния. Например, каротажные данные можно регистрировать при работе излучателей и приемников (которая может включать в себя работу одного излучателя, многочисленных излучателей, одного приемника, многочисленных приемников или сочетания их) прибора каротажа удельного сопротивления в буровой скважине. В отдельных случаях каротажные данные используют для образования измерения при каждом разносе излучателя и приемника. Например, первое измерение можно образовать из данных, регистрируемых при работе пар излучатель-приемник с использованием первого разноса излучателя и приемника, и второе измерение можно образовать из данных, регистрируемых при работе других пар излучатель-приемник с использованием второго разноса излучателя и приемника.
Каротажные данные можно регистрировать на одной глубине погружения прибора (например, на одном месте каротажа) в буровой скважине; или в некоторых случаях каротажные данные можно регистрировать с многочисленных глубин погружения прибора. Измерение при каждом разносе излучателя и приемника может быть индивидуальной величиной (например, измерением затухания сигнала в единицах децибел, измерением фазы сигнала в единицах градусов или радиан) или включающим в себя многочисленные величины. Например, скважинные измерения удельного сопротивления могут быть представлены любым из ряда геологических сигналов. Некоторыми примерами скважинных измерений удельного сопротивления являются геологические сигналы, вычисляемые в соответствии с уравнениями (1), (2) и (3), приведенными выше; можно использовать скважинные измерения удельного сопротивления других видов. Некоторые примеры моделированных измерений показаны на фиг. 8. В качестве другого примера каротажные данные могут быть измерениями 920, показанными на фиг. 9, или же каротажные данные могут использоваться для образования указанных измерений.
В отдельных случаях каждое измерение образуют из сигналов, регистрируемых на одном или нескольких приемниках во время возбуждения одного или нескольких излучателей. Измерение, связанное с конкретным разносом излучателя и приемника, может быть основано на сигналах, регистрируемых на одной частоте или на многочисленных различных частотах. Измерение, связанное с конкретным разносом излучателя и приемника, может быть основано на сигнале, регистрируемом на одном приемнике во время возбуждения одного излучателя; измерение, связанное с конкретным разносом излучателя и приемника, может быть основано на сигналах, регистрируемых на многочисленных приемниках во время возбуждения одного излучателя.
Разнос излучателя и приемника, связанный с измерением, может относиться к расстоянию вдоль продольной оси прибора каротажа удельного сопротивления. Например, разнос излучателя и приемника может быть расстоянием между излучателем и приемником, которое используется при регистрации данных измерений, или разнос излучателя и приемника может быть расстоянием между излучателем и средней точкой между двумя приемниками, которое используется для регистрации данных измерений.
Например, показанный на фиг. 3 в качестве примера прибор 300 каротажа удельного сопротивления может образовывать измерения, связанные с шестью различными разносами излучателя и приемника, 1x, 2x, 3x, 5x, 6x и 7x. Измерение, связанное с наименьшим разносом 1x излучателя и приемника, может включать в себя симметричные измерения удельного сопротивления на основании работы пары R1-R2 приемных антенн и одной или обеих излучающих антенн из пары T3-T3' излучающих антенн, асимметричные измерения удельного сопротивления на основании работы приемной антенны R3 и излучающей антенны T1'. Измерение, связанное со вторым наименьшим разносом 2x излучателя и приемника, может включать в себя симметричные измерения удельного сопротивления на основании работы пары R1-R2 приемных антенн и одной или обеих излучающих антенн из пары T2-T2' излучающих антенн, асимметричные измерения удельного сопротивления на основании работы приемной антенны R3 и излучающей антенны T2'. Измерение, связанное с третьим наименьшим разносом 3x излучателя и приемника, может включать в себя симметричные измерения удельного сопротивления на основании работы пары R1-R2 приемных антенн и одной или обеих излучающих антенн из пары T1-T1' излучающих антенн, асимметричные измерения удельного сопротивления на основании работы приемной антенны R3 и излучающей антенны T3'. Измерения, связанные с наибольшим разносом 7x излучателя и приемника, могут включать в себя асимметричные измерения удельного сопротивления на основании работы приемной антенны R3 и излучающей антенны Т1; измерения, связанные со вторым наибольшим разносом 6x излучателя и приемника, могут включать в себя асимметричные измерения на основании работы приемной антенны R3 и излучающей антенны Т2; и измерения, связанные с третьим наибольшим разносом 5x излучателя и приемника, могут включать в себя асимметричные измерения удельного сопротивления на основании работы приемной антенны R3 и излучающей антенны Т3. Прибор каротажа удельного сопротивления может образовывать измерения, связанные с дополнительными или различными разносами излучателя и приемника.
Измерение, связанное с каждым разносом излучателя и приемника, может включать в себя данные, регистрируемые на одной или нескольких рабочих частотах. Измерения можно образовывать на основании фазы, амплитуды или сочетания их и других свойств электромагнитного сигнала. В некоторых случаях прибор каротажа удельного сопротивления поворачивается вокруг продольной оси во время регистрации данных, а измерения, получаемые на этапе 1002, могут быть основаны на данных, регистрируемых при одной или нескольких заданных ориентациях прибора каротажа удельного сопротивления.
На этапе 1004 первую пару границ слоев идентифицируют на основании каротажных данных, связанных с наименьшим разносом излучателя и приемника. Например, расстояния от текущего места каротажа до верхнего и нижнего слоев можно определять по первому измерению, связанному с первым разносом излучателя и приемника, на основании карты, отображающей расстояния до границ слоев (РГС), или другого способа анализа. Любой подходящий способ инверсии можно использовать для определения положений границ. В некоторых случаях карта, отображающая расстояния до границ слоев, может включать в себя известное удельное сопротивление и углы падения и моделированное измерение при различных толщинах и истинных вертикальных глубинах. В качестве варианта или в дополнение к использованию карты, отображающей расстояния до границ слоев, границы подземных слоев можно определять с помощью просмотровой таблицы или итерационного кода инверсии.
В отдельных случаях первую пару границ слоев идентифицируют на основании каротажных данных, связанных только с наименьшим разносом излучателя и приемника, независимо от каротажных данных, связанных с любым другим разносом излучателя и приемника. Например, первая пара границ слоев может быть границами D(-1), D(1), показанными на фиг. 9, и их можно идентифицировать на основании измерения М(1) и независимо от других измерений от М(2) до M(n).
В некоторых случаях первые две границы слоев представляют собой верхнюю и нижнюю границы одного подземного слоя. Например, наименьший разнос излучателя и приемника можно использовать для идентификации положения границ одного подземного слоя, такого как, например, слоя, который находится ближе всего к продольной опорной точке прибора каротажа удельного сопротивления. В некоторых случаях наименьший разнос излучателя и приемника используют для идентификации границ из числа неприлегающих границ. Например, может быть другая промежуточная граница между первой парой границ слоев, идентифицированной на этапе 1004.
В отдельных случаях второй наименьший разнос излучателя и приемника используют для идентификации первой пары границ слоев. Например, при наименьшем разносе излучателя и приемника можно не получить достаточной информации или можно получить ненадежный результат, и в таких случаях второй наименьший разнос излучателя и приемника можно использовать вместо наименьшего разноса излучателя и приемника или в дополнение к нему. В таких отдельных случаях первую пару границ слоев можно идентифицировать независимо от каротажных данных, связанных с разносами излучателя и приемника, которые больше второго наименьшего разноса излучателя и приемника.
В некоторых случаях положения границ подземных слоев определяются вычислительным устройством или аппаратурой обработки данных другого вида, которая работает в буровой скважине. Например, вычислительное устройство может быть объединено (например, конструктивно объединено) с прибором каротажа удельного сопротивления. В некоторых случаях положения границ подземного слоя определяются вычислительным устройством или аппаратурой обработки данных другого вида, которая работает над земной поверхностью за пределами буровой скважины.
На этапе 1006 две дополнительные границы слоев идентифицируют на основании каротажных данных при следующем наименьшем разносе излучателя и приемника. Например, если второй наименьший разнос излучателя и приемника использовался на этапе 1004, то второй наименьший разнос излучателя и приемника можно использовать на этапе 1006; если второй наименьший разнос излучателя и приемника использовался на этапе 1004, то третий наименьший разнос излучателя и приемника можно использовать на этапе 1006; и т.д. Расстояние между двумя дополнительными границами слоев, идентифицированными на этапе 1006, может быть больше, чем расстояние между ранее идентифицированной парой (парами) границ слоев (например, границ слоев, идентифицированных на этапе 1004); и две дополнительные границы слоев, идентифицированные на этапе 1006, могут находиться вне ранее идентифицированных границ. Например, две дополнительные границы слоев, идентифицированные на этапе 1006, могут быть границами D(-2), D(2), показанными на фиг. 9, и их можно идентифицировать на основании измерения М(2), показанного на фиг. 9.
В некоторых случаях на этапе 1006 ранее идентифицированные границы слоев используют наряду с каротажными данными при следующем наименьшем разносе излучателя и приемника. Например, измерение М(2) и границы D(-1), D(1) можно использовать для идентификации границ D(-2), D(2), показанных на фиг. 9. В отдельных случаях ранее идентифицированные границы слоев не используют.
Если при следующем наименьшем разносе излучателя и приемника не получают достаточную информацию или если получают ненадежный результат, то в некоторых случаях на этапе 1006 можно использовать другой разнос излучателя и приемника (например, очередной следующий наименьший разнос излучателя и приемника). Например, если измерение М(2), показанное на фиг. 9, не включает в себя информацию, достаточную для идентификации границ D(-2), D(2), измерение М(3) можно использовать для идентификации границ D(-2), D(2), например, как замену измерения М(2) или дополнение к нему.
На этапе 1008 можно применить коррекцию. Например, подземные слои и границы слоев, идентифицированные на этапах 1004 и 1006, можно проверить при использовании индикаторов различных видов. Если проверки показывают, что слой или граница слоя были неправильно идентифицированы (то есть если обнаруживается явление фальшивого слоя), то можно применить соответствующую коррекцию.
В некоторых случаях на этапе 1008 определяют, что два соседних слоя имеют по существу одинаковое удельное сопротивление, и два соседних слоя могут быть объединены с получением единого подземного слоя. Например, два соседних слоя, которые были идентифицированы на этапах 1004 и 1006, могут иметь удельные сопротивления, которые равны в пределах диапазона погрешностей друг друга или в пределах заданного диапазона абсолютных или относительных значений друг друга. В таких случаях один из двух соседних слоев можно считать ложным или фальшивым слоем и ложный слой можно удалять путем объединения с другим.
В некоторых случаях на этапе 1008 определяют, что один из слоев имеет незначительную толщину, и два соседних слоя могут быть объединены с получением единого подземного слоя. Например, один из слоев, идентифицированных на этапах 1004 и 1006, может иметь нулевую толщину, толщину, которая находится в пределах диапазона погрешностей используемого измерения или в пределах заданной пороговой толщины. В таких случаях тонкий слой можно считать ложным или фальшивым слоем и ложный слой можно удалять путем объединения с соседним слоем.
В некоторых случаях на этапе 1008 определяют, что два соседних слоя расположены в неправильном порядке в модели пласта, которая была составлена на основании каротажных данных, и в соответствии с этим можно переупорядочить два соседних слоя. Например, подземные слои, которые были идентифицированы на этапах 1004 и 1006, можно упорядочить на основании разносов излучателя и приемника, которые были использованы при идентификации. Как показано в примере, представленном на фиг. 9, слоям R(-1), R(0), R(1) и т.д. придан индекс на основании измерения, которое было использовано при идентификации их. В некоторых случаях инверсией данного слоя можно идентифицировать границу, которая находится в пределах одного из других ранее идентифицированных слоев. В таких случаях индексы слоев и границы их можно изменять до соответствия их физическим положениям относительно положений других идентифицированных слоев и границ.
Если на этапе 1010 имеются измерения при дополнительных разносах излучателя и приемника, в способе 1000 можно вернуться к этапу 1006 для идентификации двух дополнительных границ слоев на основании следующего наименьшего разноса излучателя и приемника. В способе 1000 можно выполнять итерацию действий 1006, 1008, 1010 до тех пор, пока не будут использованы все измерения применительно к данной точке каротажа или пока не будет достигнуто другое условие завершения. Когда больше нет неиспользованных измерений применительно к точке каротажа, в способе 1000 переходят к этапу 1012.
Таким образом, путем повторения отдельных действий способ 1000 можно продолжать итерационно, чтобы определять положения границ подземных слоев. При первой итерации (на этапе 1004) измерения, связанные с наименьшим разносом излучателя и приемника, используют для определения положений границ применительно к ближайшей паре границ. При каждой последующей итерации (на этапе 1006) другое измерение используют для определения положений границ применительно к другой паре границ. Для каждой последующей итерации (на этапе 1006) используют измерение при большем разносе излучателя и приемника, чем для предшествующей итерации. И при каждой последующей итерации (на этапе 1006) идентифицируют пару положений границ, которая находится дальше, чем пара положений границ, идентифицированная при предшествующей итерации.
Если на этапе 1012 имеются все измерения для дополнительных точек каротажа, в способе 1000 можно вернуться к этапу 1004 для идентификации первых двух границ слоев на основании наименьшего разноса излучателя и приемника применительно к следующей точке каротажа. В способе 1000 можно итерировать действия 1004, 1006, 1008, 1010, 1012 до тех пор, пока не будут использованы все измерения применительно ко всем точкам каротажа или пока не будет достигнуто другое условие завершения. Когда больше нет точек каротажа, в способе переходят к этапу 1014. В некоторых случаях в способе переходят к этапу 1014 независимо от наличия дополнительных точек каротажа (на этапе 1012) или дополнительных измерений (на этапе 1010).
На этапе 1014 образуют выходные данные. Выходными данными могут быть модель удельного сопротивления подземного пласта, данные, идентифицирующие положения или подземные слои, границы слоев, удельные сопротивления слоев и т.д., или могут быть образованы выходные данные других типов. Выходные данные могут представлять выходные данные алгоритма многослойной инверсии. Выходные данные могут быть нанесены на график или иным образом отображены для показа структуры пласта на основании одной или нескольких точек каротажа.
Некоторые варианты осуществления предмета изобретения и действий, рассмотренные в этом описании, могут быть реализованы цифровыми электронными схемами или компьютерным программным обеспечением, программно-аппаратными средствами или аппаратными средствами, в том числе структурами, раскрытыми в этом описании, и структурными эквивалентами их, а также сочетаниями одного или нескольких видов. Некоторые варианты осуществления предмета изобретения, рассмотренные в этом описании, могут быть реализованы в виде одной или нескольких компьютерных программ, то есть в виде одного или нескольких модулей компьютерных программных инструкций, кодированных на компьютерном носителе данных для выполнения аппаратурой обработки данных или для управления аппаратурой обработки данных. Компьютерным носителем данных может быть считываемый компьютером носитель данных, считываемая компьютером подсистема хранения данных, матрица или устройство памяти с произвольной или последовательной выборкой или сочетание одного или нескольких видов, либо компьютерный носитель данных может быть включен в перечисленные устройства памяти. Кроме того, хотя на компьютерном носителе данных нет проходящего сигнала, компьютерный носитель данных может быть источником или приемником компьютерных программных инструкций, кодированных искусственно образуемым проходящим сигналом. Кроме того, компьютерным носителем данных может быть один или несколько отдельных физических компонентов или сред (например, многочисленных компакт-дисков, жестких дисков или других носителей), либо компьютерный носитель данных может быть включен в физические компоненты или среды.
Термин «аппаратура обработки данных» охватывает все виды аппаратуры, устройств или машин для обработки данных, в том числе, например, программируемый процессор, компьютер, систему на кристалле или многочисленные перечисленные виды или сочетания упомянутых выше. Аппаратура может включать в себя специализированные логические схемы, например вентильную матрицу, программируемую пользователем (ВМПП), или интегральную схему прикладной ориентации (ИСПО). В дополнение к техническому обеспечению аппаратура может включать в себя код, который создает условия для выполнения текущей компьютерной программы, например код, который образует встроенную программу процессора, стек протоколов, систему управления базой данных, операционную систему, межплатформную среду выполнения, виртуальную машину или сочетание одного или нескольких видов. Аппаратурой и средой выполнения можно реализовывать ряд различных инфраструктур вычислительной модели, таких как веб-службы, распределенные вычислительные и сеточные вычислительные инфраструктуры.
Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, сценарий или код) может быть написана на языке программирования любой формы, включая транслируемые или интерпретируемые языки, декларативные или процедурные языки. Компьютерная программа может, но необязательно, соответствовать файлу в файловой системе. Программу можно сохранять на части файла, который содержит другие программы или данные (например, один или несколько сценариев, сохраняемых в документе на языке разметки), в одном файле, специально предназначенном для текущей программы, или в многочисленных координируемых файлах (например, файлах, в которых сохраняются один или несколько модулей, подпрограмм или частей кода). Компьютерная программа может быть размещена для выполнения на одном компьютере или на многочисленных компьютерах, которые расположены на одном месте или распределены по многочисленным местам и взаимосвязаны сетью передачи данных.
Некоторые из процессов или логических потоков, рассмотренных в этом описании, могут выполняться одним или несколькими программируемыми процессорами, выполняющими одну или несколько компьютерных программ для осуществления операций относительно входных данных и образования выходных данных. Кроме того, процессы и логические потоки могут выполняться, а аппаратура также может быть реализована специализированными логическими схемами, например вентильной матрицей, программируемой пользователем (ВМПП), или интегральной схемой прикладной ориентации (ИСПО).
Процессоры, пригодные для выполнения компьютерной программы, включают в себя, например, микропроцессоры общего назначения и специализированные, а также процессоры цифрового компьютера любого вида. Обычно процессор принимает инструкции и данные с постоянного запоминающего устройства или оперативного запоминающего устройства или с обоих. Компьютер включает в себя процессор для выполнения действий в соответствии с инструкциями и одно или несколько запоминающих устройств для сохранения инструкций и данных. Кроме того, компьютер может включать в себя одно или несколько массовых запоминающих устройств, например магнитных, магнитооптических дисков или оптических дисков, или компьютер может быть при работе связан с ними для приема или передачи данных или для того и другого. Однако компьютер необязательно должен иметь такие устройства. Устройства, пригодные для сохранения компьютерных программных инструкций и данных, включают в себя все виды энергонезависимой памяти, устройства хранения и запоминания данных, в том числе, например, полупроводниковые запоминающие устройства (например, программируемое постоянное запоминающее устройство, электрически стираемую программируемую постоянную память, флэш-память и другие), магнитные диски, (например, внутренние жесткие диски, съемные диски и другие), магнитооптические диски, а также компакт-диски, доступные только для чтения, и цифровые универсальные диски, доступные только для чтения. Процессор и память могут дополняться специализированными логическими схемами или включаться в них.
Для обеспечения взаимодействия с пользователем действия могут выполняться на компьютере, имеющем дисплейное устройство (например, монитор или дисплейное устройство другого вида) для отображения информации пользователю и клавиатуру и указательное устройство (например, мышь, шаровой манипулятор, чувствительный к прикосновению экран или указательное устройство другого вида), посредством которых пользователь может обеспечивать ввод в компьютер. Кроме того, для обеспечения взаимодействия с пользователем можно использовать устройства других видов; например, обратная связь к пользователю может быть сенсорной обратной связью любого вида, например визуальной обратной связью, слуховой обратной связью или тактильной обратной связью; а входные данные от пользователя могут приниматься в любой форме, включая акустический, речевой или тактильный ввод. В дополнение к этому компьютер может находиться во взаимодействии с пользователем путем передачи документов в устройство, которое используется пользователем, и приема документов из этого устройства; например, путем передачи веб-страниц в веб-браузер клиентского устройства пользователя в ответ на запросы, принимаемые от веб-браузера.
Клиент и сервер обычно удалены друг от друга и обычно взаимодействуют по сети связи. Примеры сетей связи включают в себя локальную сеть (ЛС) и глобальную сеть (ГС), объединенную сеть (например, Интернет), сеть, содержащую спутниковую линию, и одноранговые сети (например, специальные одноранговые сети). Взаимоотношение клиента и сервера возникает при выполнении компьютерных программ на соответствующих компьютерах и наличии связи клиент-сервер.
Согласно одному общему аспекту границы многочисленных подземных слоев идентифицируют на основании измерений, связанных с многочисленными разносами излучателя и приемника прибора каротажа удельного сопротивления.
Согласно некоторым аспектам измерения образуют на основании работы многочисленных излучателей и многочисленных приемников прибора каротажа удельного сопротивления на одной глубине погружения прибора в буровой скважине, образованной в подземной области, которая включает в себя многочисленные подземные слои. Измерения включают в себя первое измерение, связанное с первым разносом излучателя и приемника, и второе измерение, связанное со вторым, большим, разносом излучателя и приемника. Положения границ подземных слоев определяют на основании измерений. Первую пару положений подземных границ определяют на основании первого измерения и независимо от второго измерения. Вторую, другую, пару положений подземных границ определяют на основании второго измерения. Первая пара положений подземных границ находится между второй парой положений подземных границ в подземной области.
Реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Положения границ определяют итерационно. При первой итерации одно или несколько измерений, связанных с наименьшим разносом излучателя и приемника, используют для определения положений границ применительно к первой паре границ. При каждой последующей итерации одно или несколько измерений используют для определения положений границ применительно к другой паре границ. Измерения, используемые при каждой последующей итерации, связаны с большим разносом излучателя и приемника, нежели измерения, используемые при предшествующей итерации. Пара положений границ, определяемая при каждой итерации, находится дальше, чем пара положений границ, определяемая при предшествующей итерации.
В дополнение к этому или как вариант реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Измерения включают в себя третье измерение, связанное с третьим разносом излучателя и приемника, который больше, чем второй разнос излучателя и приемника. При первой итерации первое измерение используют для определения положений границ первого подземного слоя. При второй итерации второе измерение используют для определения положений границ второго и третьего подземных слоев. При третьей итерации третье измерение используют для определения положений границ четвертого и пятого подземных слоев. Первый подземный слой находится между вторым и третьим подземными слоями; первый, второй и третий подземные слои находятся между четвертым и пятым подземными слоями.
В дополнение к этому или как вариант реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Каждое из первого и второго измерений представляет собой компенсированное измерение, образуемое на основании работы многочисленных симметричных пар излучатель-приемник прибора каротажа удельного сопротивления. Каждое из первого и второго измерений представляет собой некомпенсированное измерение, образуемое на основании данных, регистрируемых с помощью индивидуальной пары излучатель приемник.
В дополнение к этому или как вариант реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Каждое из первого и второго измерений образуют на основании данных, регистрируемых при возбуждении одного или нескольких излучателей на многочисленных различных электромагнитных частотах. Каждое из первого и второго измерений образуют на основании по меньшей мере одной из фазы или амплитуды электромагнитных сигналов, обнаруживаемых на одном или нескольких приемниках. Работа излучателей и приемников включает в себя поворот прибора каротажа удельного сопротивления вокруг продольной оси прибора каротажа удельного сопротивления, а каждое из первого и второго измерений основано на данных, регистрируемых при многочисленных заданных ориентациях прибора каротажа удельного сопротивления.
В дополнение к этому или как вариант реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Определение положений границ подземных слоев включает в себя применение коррекции. Два соседних слоя идентифицируют по измерениям, связанным с двумя различными разносами излучателя и приемника. Два соседних слоя имеют по существу одинаковое удельное сопротивление; и два соседних слоя объединяют для определения положений границ одного подземного слоя. Толщина одного из двух соседних слоев меньше заданного допуска; и два соседних слоя объединяют для определения положений границ единого подземного слоя. Два соседних слоя идентифицируют в порядке, который основан на двух разносах излучателя и приемника; и соседние слои переупорядочивают на основании их соответствующих положений.
Согласно некоторым аспектам система каротажа удельного сопротивления включает в себя вычислительную систему. Вычислительная система может выполнять операции приема измерений, образуемых на основании работы многочисленных излучателей и многочисленных приемников прибора каротажа удельного сопротивления на глубине погружения прибора в буровой скважине, образованной в подземной области, которая включает в себя многочисленные подземные слои. Измерения включают в себя первое измерение, связанное с первым разносом излучателя и приемника, и второе измерение, связанное со вторым, большим, разносом излучателя и приемника. Вычислительная система выполняет операции определения положений границ подземных слоев на основании измерений. Независимо от второго измерения первую пару положений подземных границ определяют на основании первого измерения. Вторую, другую, пару положений подземных границ определяют на основании второго измерения. Первая пара положений подземных границ находится между второй парой положений подземных границ в подземной области.
Реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Система каротажа удельного сопротивления включает в себя прибор каротажа удельного сопротивления. Прибор каротажа удельного сопротивления включает в себя корпус прибора, которым задается продольная ось прибора каротажа удельного сопротивления, излучающие антенны расположены на многочисленных местах вдоль продольной оси, и приемные антенны расположены на многочисленных местах вдоль продольной оси.
В дополнение к этому или как вариант реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Прибор каротажа удельного сопротивления может выполнять операцию регистрации первого сигнала на первой приемной антенне в первом положении приемника вдоль продольной оси прибора каротажа удельного сопротивления при возбуждении первого излучателя в первом положении излучателя вдоль продольной оси прибора каротажа удельного сопротивления. Прибор каротажа удельного сопротивления может выполнять операцию образования первого измерения на основании первого сигнала. Прибор каротажа удельного сопротивления может выполнять операцию регистрации второго сигнала на первой приемной антенне в первом положении приемника вдоль продольной оси прибора каротажа удельного сопротивления при возбуждении второй излучающей антенны во втором положении излучателя вдоль продольной оси прибора каротажа удельного сопротивления. Прибор каротажа удельного сопротивления может выполнять операцию образования второго измерения на основании второго сигнала. Расстояние между первым положением излучателя и первым положением приемника меньше, чем расстояние между вторым положением излучателя и первым положением приемника.
В дополнение к этому или как вариант реализации этих и других аспектов могут включать в себя одну или несколько из следующих особенностей. Вычислительная система может выполнять операции определения положений границ слоев в реальном времени в процессе операций бурения или операций каротажа зондом на кабеле. Вычислительная система встроена в прибор каротажа удельного сопротивления и вычислительная система выполнена с возможностью работы при расположении в буровой скважине.
Некоторые реализации этих и других аспектов могут обеспечивать одно или несколько из следующих преимуществ, по меньшей мере в отдельных случаях работы. Способы, описанные в этой заявке, в отдельных случаях могут обеспечивать выполнение независимых операций инверсии для различных точек каротажа и обеспечивать точные результаты для сложных прерывистых структур пласта. Способами, описанными в этой заявке, в отдельных случаях можно быстрее получать более точную информацию о пласте. В соответствии с этим геонавигационные указания и информацию других видов можно получать заблаговременно, например до соприкосновения прибора с одним или несколькими подземными слоями. Такая улучшенная геонавигация может повышать добычу нефти или газа, а в некоторых случаях может обеспечивать другие преимущества.
Хотя это описание содержит многочисленные подробности, не следует толковать их как ограничения заявленного объема, а скорее как характеристики признаков, специфических для конкретных примеров. Кроме того, некоторые признаки, которые рассмотрены в этом описании в контексте отдельных реализаций, могут быть объединены. И наоборот, различные признаки, которые описаны в контексте одной реализации, также могут быть реализованы в многочисленных вариантах осуществления по отдельности или в любой подходящей субкомбинации.
Описан ряд вариантов осуществления. Тем не менее, должно быть понятно, что могут быть сделаны различные модификации. В соответствии с этим другие варианты осуществления находятся в объеме нижеследующей формулы изобретения.
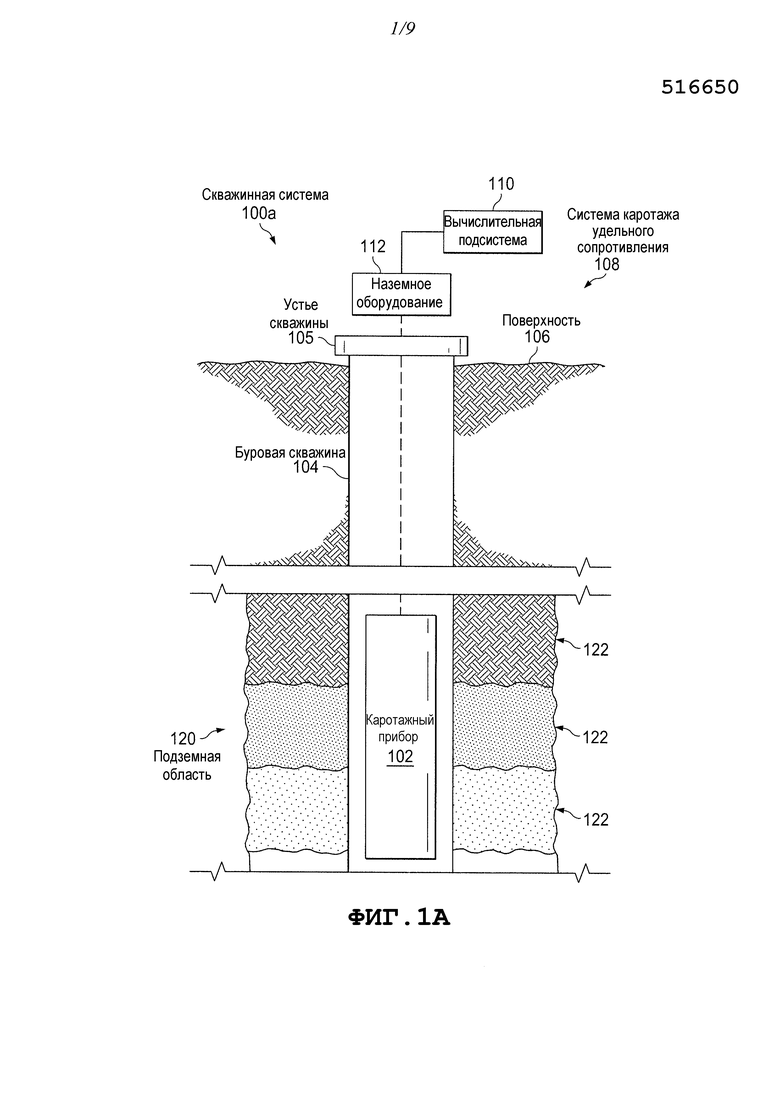
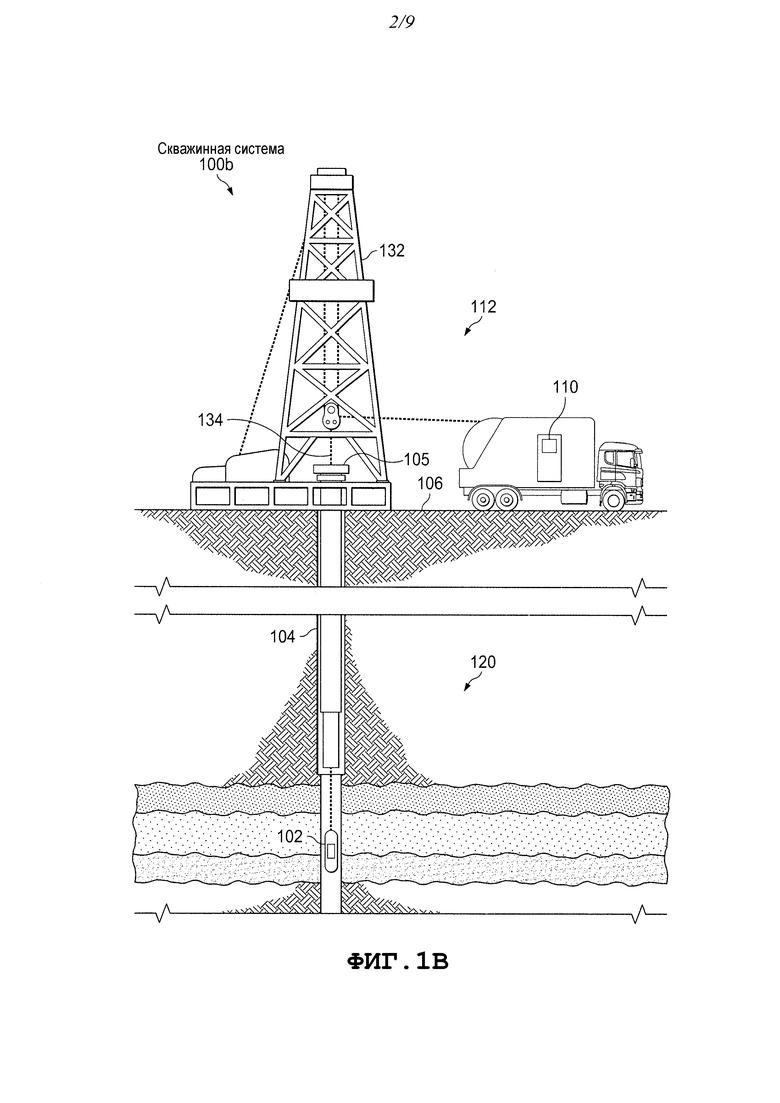
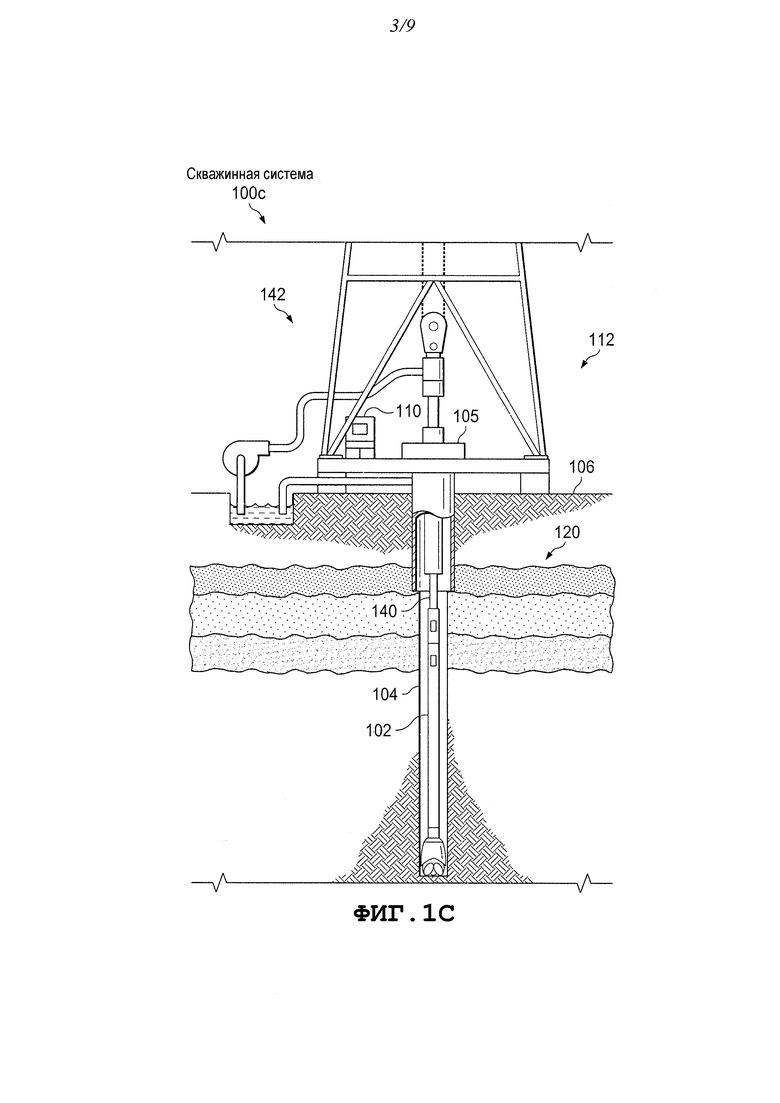
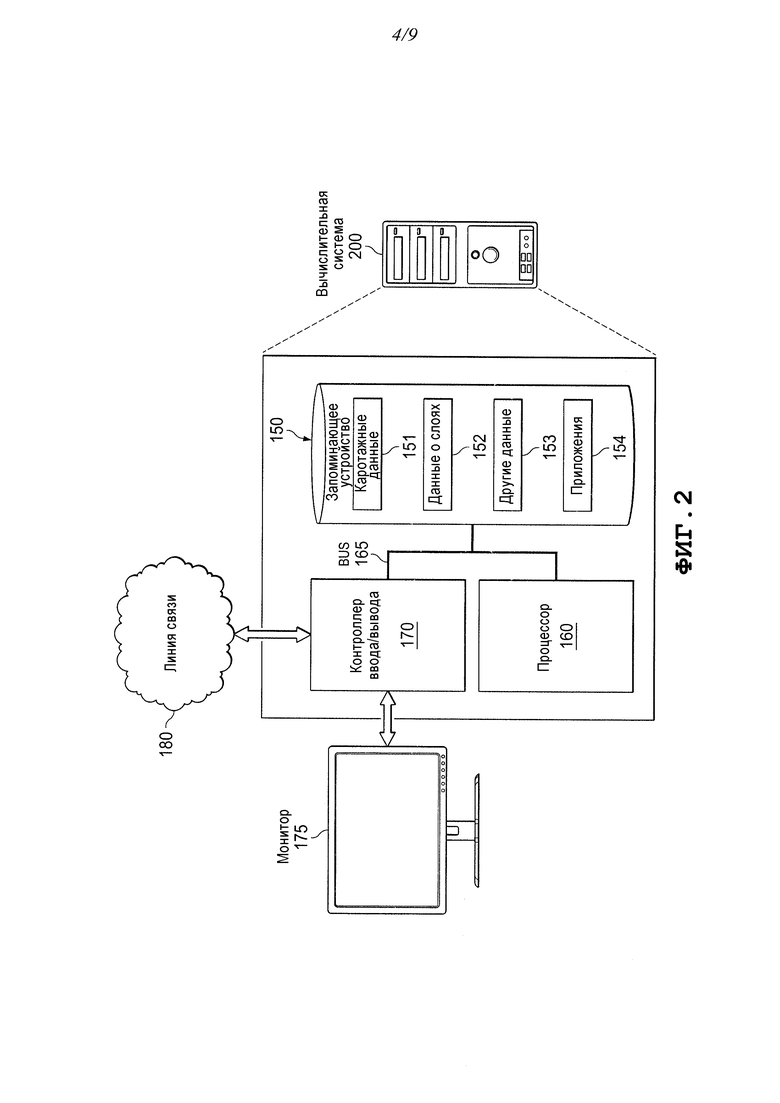
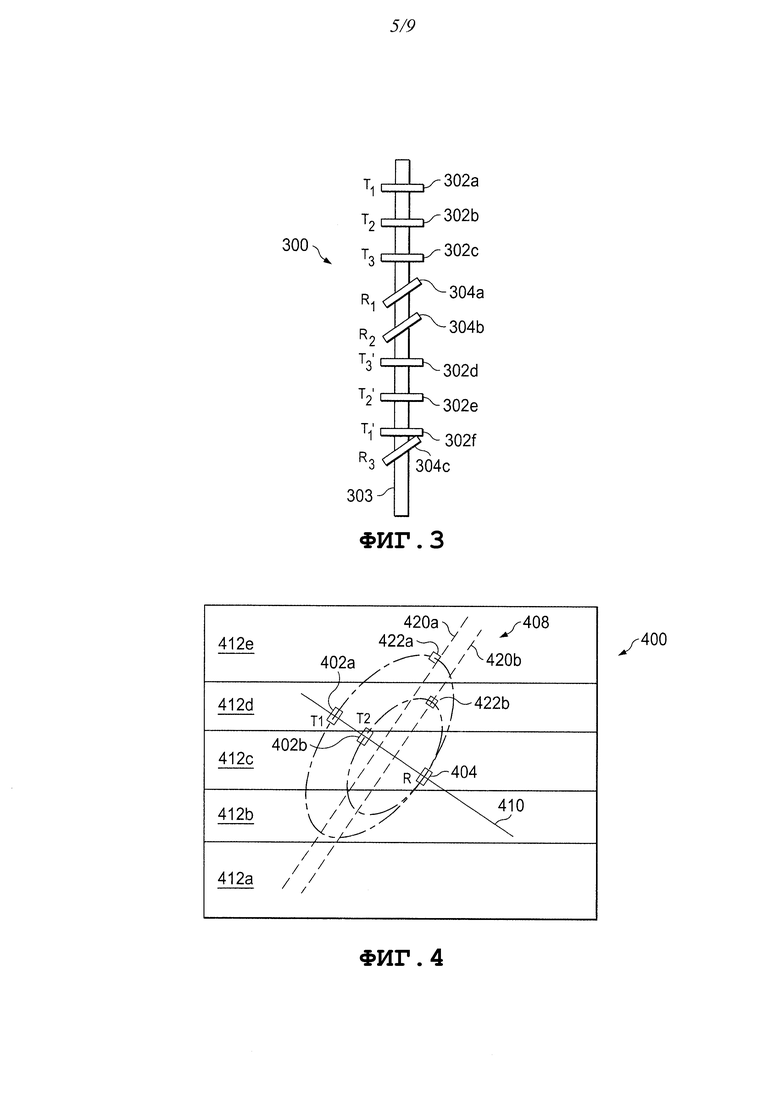
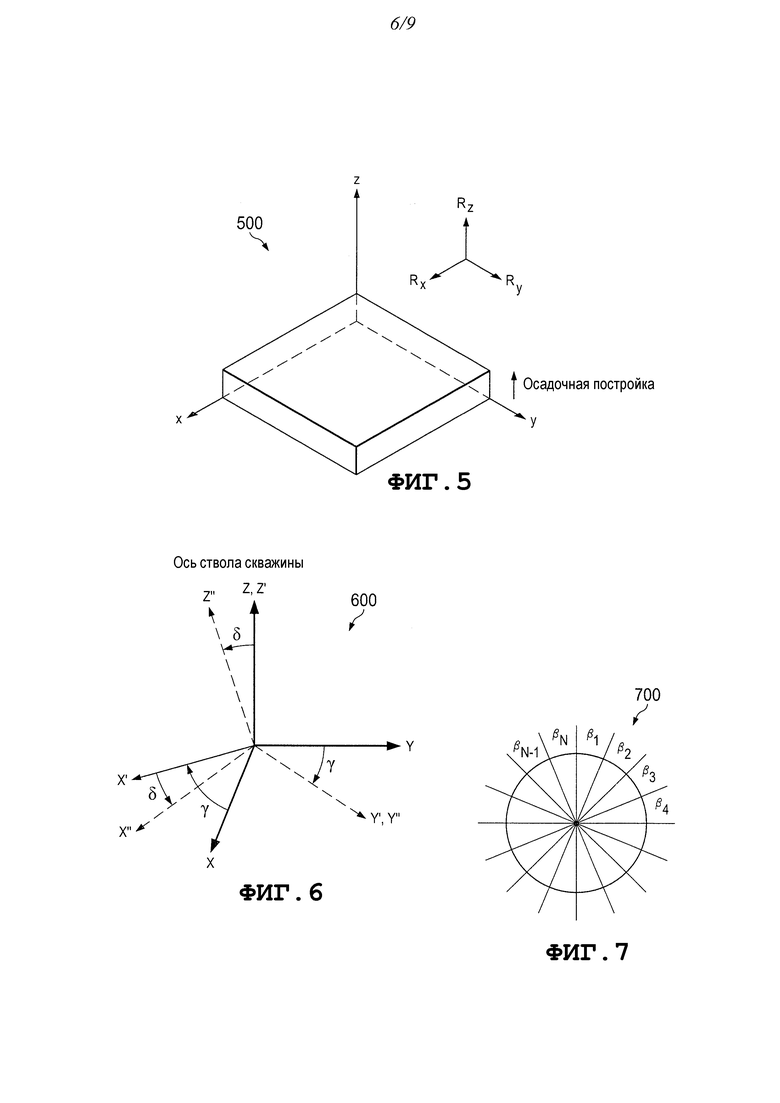
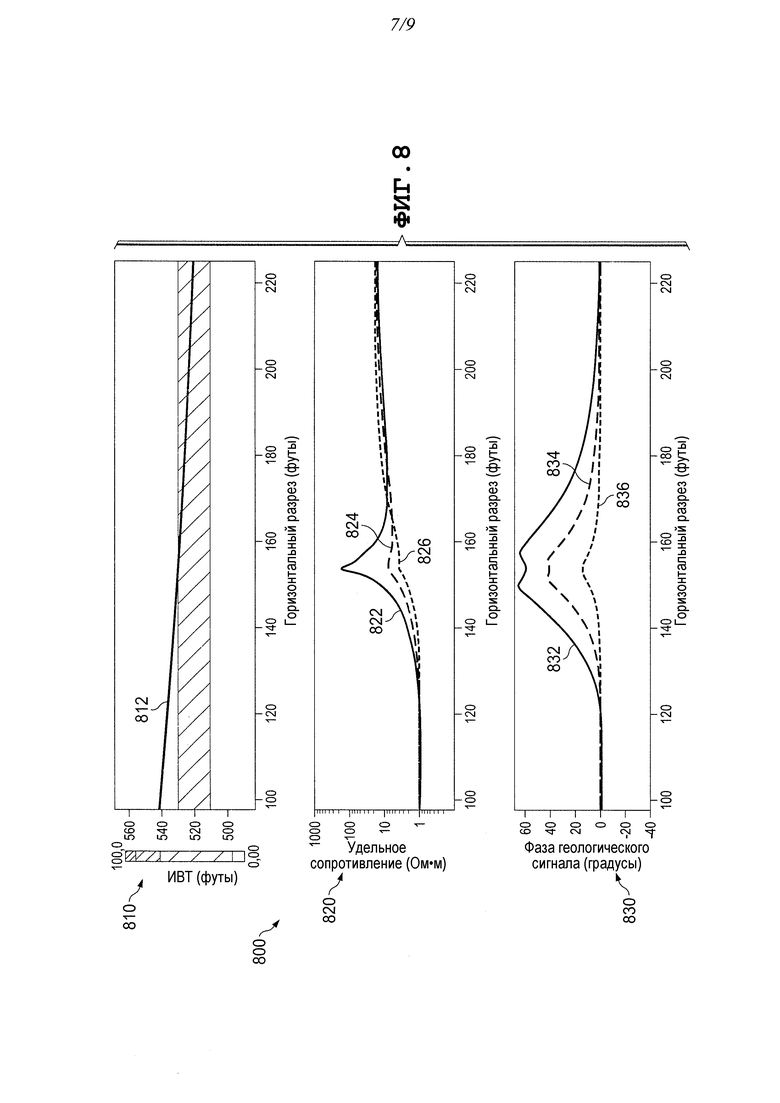
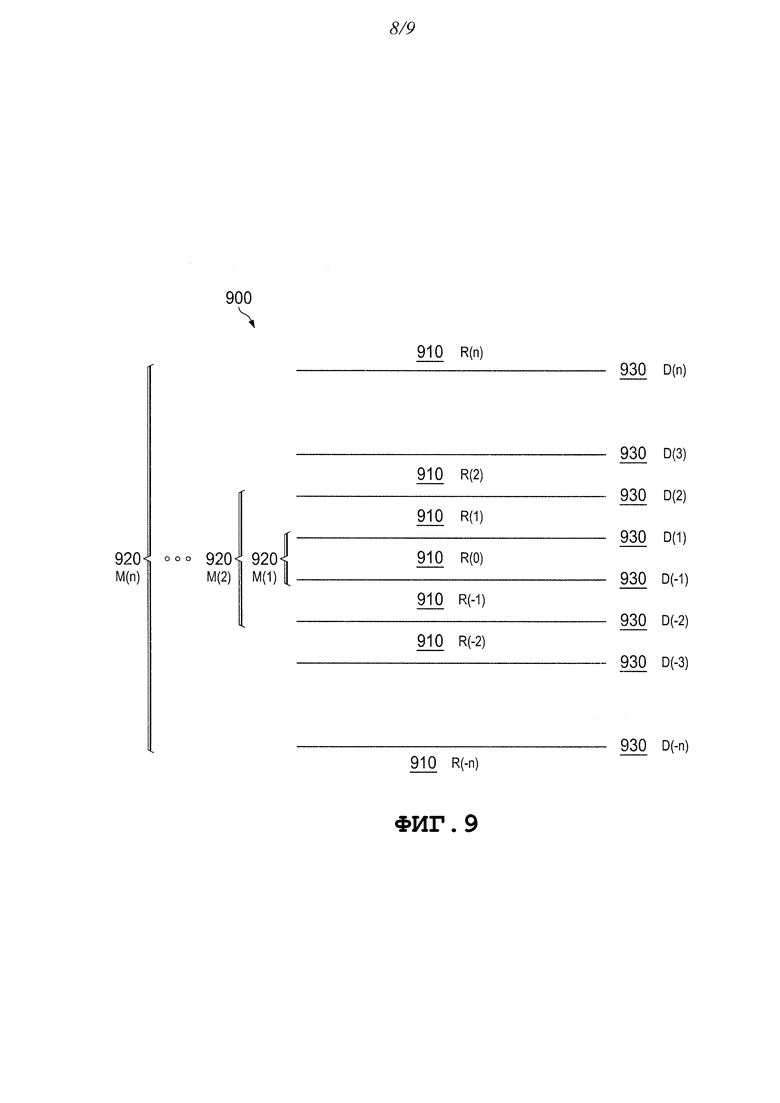
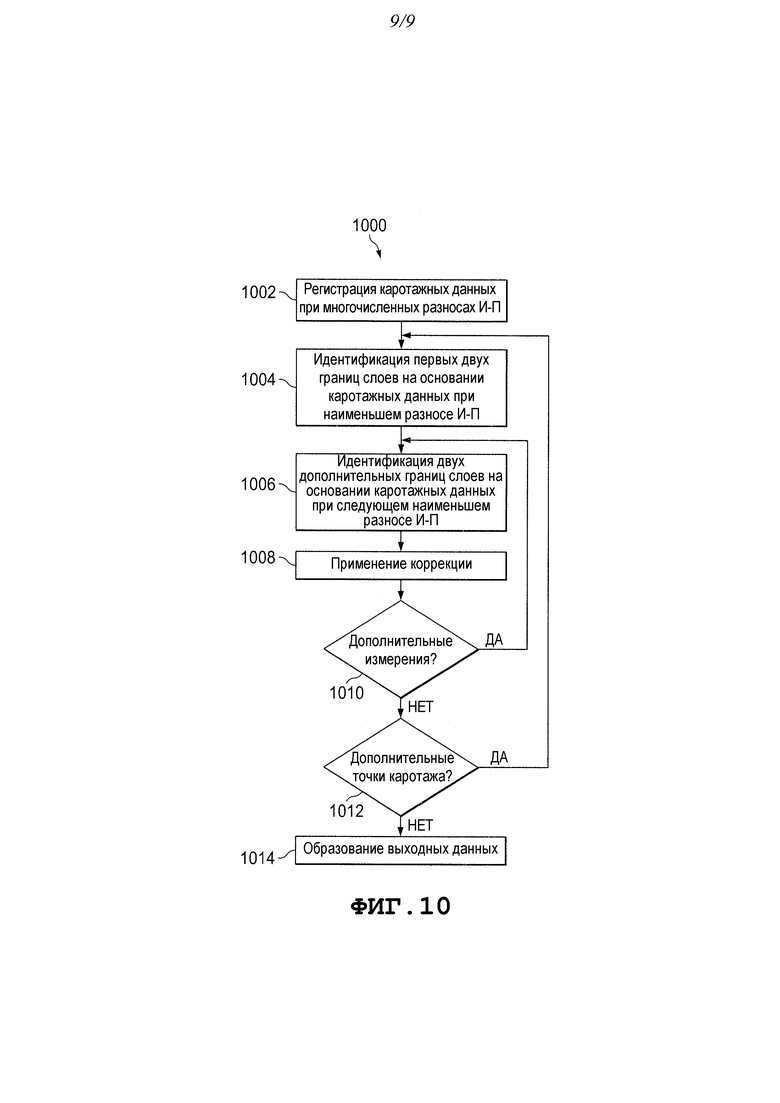
Изобретение относится к геофизике и предназначено для обнаружения положений границ многочисленных подземных слоев. Сущность: границы подземных слоев в подземной области идентифицируют на основании измерений, связанных с многочисленными различными разносами излучателя и приемника прибора каротажа удельного сопротивления. Первую пару положений подземных границ определяют на основании первого измерения, связанного с первым разносом излучателя и приемника. Вторую, другую, пару положений подземных границ определяют на основании второго измерения, связанного со вторым, большим, разносом излучателя и приемника. Первая пара положений подземных границ находится между второй парой положений подземных границ. Технический результат: возможность повышения точности для сложных прерывистых структур и скорости получения информации. 4 н. и 16 з.п. ф-лы, 10 ил.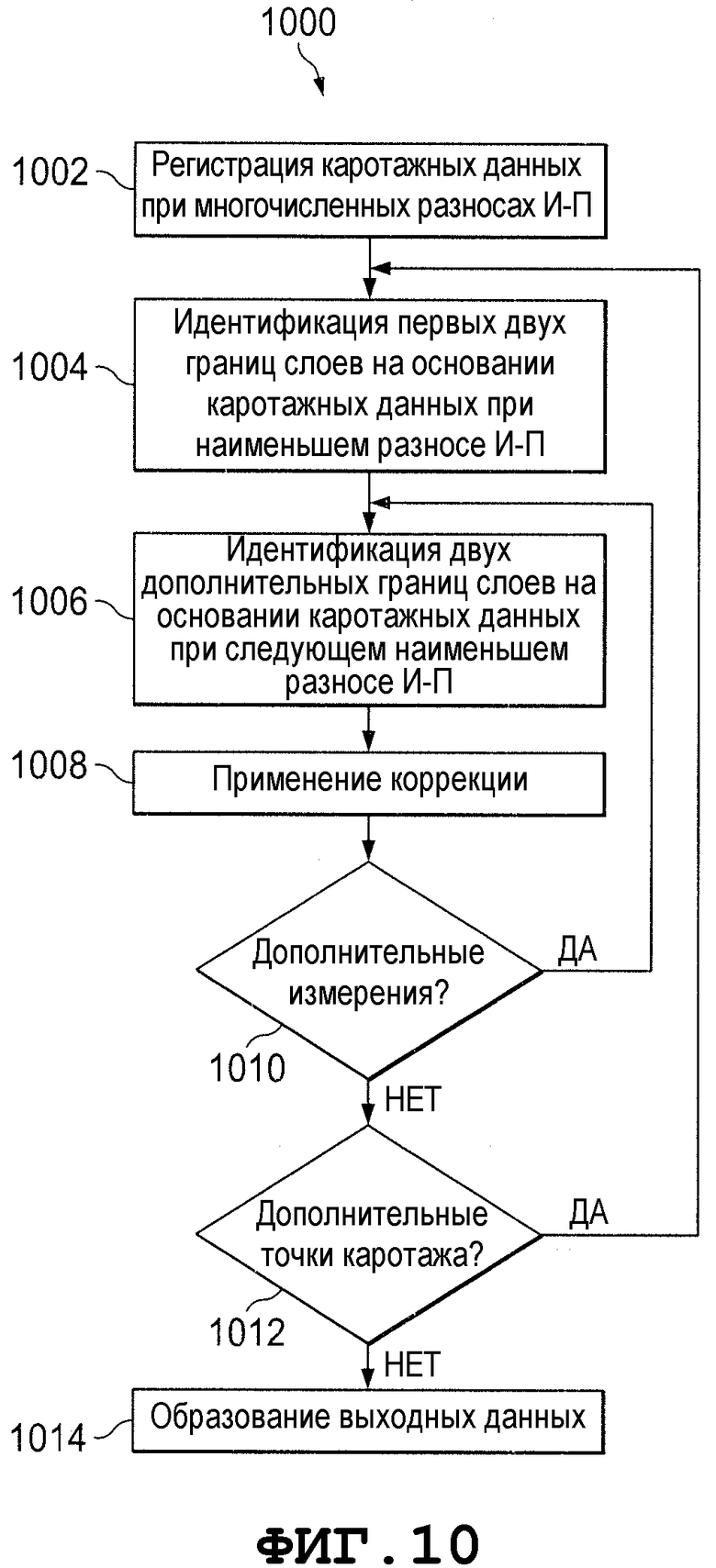
1. Способ обнаружения положений границ подземных слоев, содержащий этапы, на которых:
обращаются к измерениям, образуемым на основании работы одного или нескольких излучателей и одного или нескольких приемников прибора каротажа удельного сопротивления на глубине погружения прибора в буровой скважине, образованной в подземной области, которая включает в себя многочисленные подземные слои, при этом измерения включают в себя первое измерение, связанное с первым разносом излучателя и приемника, и второе измерение, связанное со вторым, большим, разносом излучателя и приемника; и
при работе аппаратуры обработки данных определяют положения границ подземных слоев на основании измерений, при этом определение положений границ включает в себя:
независимо от второго измерения определение первой пары положений подземных границ на основании первого измерения; и
определение второй, другой, пары положений подземных границ на основании второго измерения, при этом по меньшей мере одно из первой пары положений подземных границ находится между второй парой положений подземных границ в подземной области.
2. Способ по п. 1, в котором каждое из первого и второго измерений представляет собой некомпенсированное измерение, основанное на данных, регистрируемых с помощью одной пары излучатель-приемник.
3. Способ по п. 1, в котором каждое из первого и второго измерений образуют из данных, регистрируемых при возбуждении одного или нескольких излучателей на многочисленных различных электромагнитных частотах.
4. Способ по п. 1, в котором каждое из первого и второго измерений образуют на основании по меньшей мере одной из фазы или амплитуды электромагнитных сигналов, обнаруживаемых на одном или нескольких приемниках.
5. Способ по п. 1, в котором работа излучателей и приемников включает в себя поворот прибора каротажа удельного сопротивления вокруг продольной оси прибора каротажа удельного сопротивления, а каждое из первого и второго измерений основано на данных, регистрируемых при многочисленных заданных ориентациях прибора каротажа удельного сопротивления.
6. Способ по п. 1, в котором излучатели и приемники прибора каротажа удельного сопротивления характеризуются многочисленными разносами излучателя и приемника, а способ содержит итерационное определение положений границ подземных слоев, в соответствии с которым:
при первой итерации используют одно или несколько измерений, связанных с наименьшим разносом излучателя и приемника, для определения положений границ применительно к соседней паре границ; и
при каждой последующей итерации используют одно или несколько других измерений для определения положений границ применительно к другой паре границ, при этом измерения, используемые при каждой последующей итерации, связаны с большим разнесением излучателя и приемника, чем измерения, используемые при предшествующей итерации, а пара положений границ, определяемая при каждой итерации, находится дальше, чем пара положений границ, определяемая при предшествующей итерации.
7. Способ по п. 6, в котором измерения включают в себя третье измерение, связанное с третьим разносом излучателя и приемника, который больше, чем второй разнос излучателя и приемника, а в способе:
при первой итерации используют первое измерение для определения положений границ первого подземного слоя;
при второй итерации используют второе измерение для определения положений границ второго и третьего подземных слоев, при этом первый подземный слой находится между вторым и третьим подземными слоями; и
при третьей итерации используют третье измерение для определения положений границ четвертого и пятого подземных слоев, при этом первый, второй и третий подземные слои находятся между четвертым и пятым подземными слоями.
8. Способ по п. 1, в котором определение положений границ подземных слоев включает в себя:
идентификацию двух соседних слоев по измерениям, связанным с двумя различными разносами излучателя и приемника;
определение, что два соседних слоя имеют по существу одинаковое удельное сопротивление; и
объединение двух соседних слоев для определения положений границ единого подземного слоя.
9. Способ по п. 1, в котором определение положений границ подземных слоев включает в себя:
идентификацию двух соседних слоев по измерениям, связанным с двумя различными разносами излучателя и приемника;
определение, что толщина одного из двух соседних слоев меньше, чем заданный допуск; и
объединение двух соседних слоев для определения положений границ единого подземного слоя.
10. Способ по п. 1, в котором определение положений границ подземных слоев включает в себя:
идентификацию двух соседних слоев по измерениям, связанным с двумя различными разносами излучателя и приемника, при этом два соседних слоя идентифицируют в порядке, который основан на двух соответствующих разносах излучателя и приемника; и
переупорядочивание соседних слоев на основании их соответствующих положений.
11. Способ обнаружения положений границ подземных слоев, содержащий этапы, на которых:
обращаются к измерениям, образуемым на основании работы одного или нескольких излучателей и одного или нескольких приемников прибора каротажа удельного сопротивления на глубине погружения прибора в буровой скважине, образованной в подземной области, которая включает в себя многочисленные подземные слои, при этом измерения включают в себя первое и второе измерения, при этом каждое из первого и второго измерений представляет собой компенсированное измерение, образуемое на основании работы многочисленных симметричных пар излучатель-приемник прибора каротажа удельного сопротивления; и
при работе аппаратуры обработки данных определяют положения границ подземных слоев на основании измерений, при этом определение положений границ включает в себя:
независимо от второго измерения определение первой пары положений подземных границ на основании первого измерения; и
определение второй, другой, пары положений подземных границ на основании второго измерения, при этом по меньшей мере одно из первой пары положений подземных границ находится между второй парой положений подземных границ в подземной области.
12. Считываемый компьютером носитель, кодированный инструкциями, при исполнении которых аппаратурой обработки данных выполняются следующие действия:
обращение к измерениям, образуемым на основании работы одного или нескольких излучателей и одного или нескольких приемников прибора каротажа удельного сопротивления на глубине погружения прибора в буровой скважине, образованной в подземной области, которая включает в себя многочисленные подземные слои, при этом измерения включают в себя первое измерение, связанное с первым разносом излучателя и приемника, и второе измерение, связанное со вторым, большим, разносом излучателя и приемника; и
определение положений подземных границ подземных слоев на основании измерений, при этом определение положений границ включает в себя:
независимо от второго измерения определение первой пары положений подземных границ на основании первого измерения; и
определение второй, другой, пары положений подземных границ на основании второго измерения, при этом по меньшей мере одно из первой пары положений подземных границ находится между второй парой положений подземных границ в подземной области.
13. Считываемый компьютером носитель по п. 12, в котором излучатели и приемники прибора каротажа удельного сопротивления характеризуются многочисленными разносами излучателя и приемника, а действия включают в себя итерационное определение положений границ подземных слоев, в соответствии с которым:
при первой итерации используют одно или несколько измерений, связанных с наименьшим разносом излучателя и приемника, для определения положений границ применительно к соседней паре границ; и
при каждой последующей итерации используют одно или несколько других измерений для определения положений границ применительно к другой паре границ, при этом измерения, используемые при каждой последующей итерации, связаны с большим разнесением излучателя и приемника, чем измерения, используемые при предшествующей итерации, а пара положений границ, определяемая при каждой итерации, находится дальше, чем пара положений границ, определяемая при предшествующей итерации.
14. Считываемый компьютером носитель по п. 13, в котором измерения включают в себя третье измерение, связанное с третьим разносом излучателя и приемника, который больше, чем второй разнос излучателя и приемника, а действия включают в себя:
при первой итерации использование первого измерения для определения положений границ первого подземного слоя;
при второй итерации использование второго измерения для определения положений границ второго и третьего подземных слоев, при этом первый подземный слой находится между вторым и третьим подземными слоями; и
при третьей итерации использование третьего измерения для определения положений границ четвертого и пятого подземных слоев, при этом первый, второй и третий подземные слои находятся между четвертым и пятым подземными слоями.
15. Считываемый компьютером носитель по п. 12, в котором определение положений границ подземных слоев включает в себя:
идентификацию многочисленных соседних слоев по измерениям, связанным с многочисленными различными разносами излучателя и приемника, при этом каждый из соседних слоев идентифицируется по данным, связанным с соответствующим разносом излучателя и приемника; и
объединение двух или большего количества соседних слоев для определения положений границ единого подземного слоя.
16. Система каротажа удельного сопротивления, содержащая:
прибор каротажа удельного сопротивления, который включает в себя один или несколько излучателей и один или несколько приемников; и
вычислительную систему, способную при работе:
принимать измерения, образуемые на основании работы прибора каротажа удельного сопротивления на глубине погружения прибора в буровой скважине, образованной в подземной области, которая включает в себя многочисленные подземные слои, при этом измерения включают в себя первое измерение, связанное с первым разносом излучателя и приемника, и второе измерение, связанное со вторым, большим, разносом излучателя и приемника; и
определять положения подземных границ подземных слоев на основании измерений, при этом определение положений границ включает в себя:
независимо от второго измерения определение первой пары положений подземных границ на основании первого измерения; и
определение второй, другой, пары положений подземных границ на основании второго измерения, при этом по меньшей мере одно из первой пары положений подземных границ находится между второй парой положений подземных границ в подземной области.
17. Система по п. 16, в которой прибор каротажа удельного сопротивления включает в себя:
корпус прибора, которым задается продольная ось прибора каротажа удельного сопротивления;
излучающие антенны, расположенные на многочисленных местах вдоль продольной оси; и
приемные антенны, расположенные на многочисленных местах вдоль продольной оси.
18. Система по п. 17, в которой прибор каротажа удельного сопротивления способен при работе:
регистрировать первый сигнал на первой приемной антенне в первом положении приемника вдоль продольной оси прибора каротажа удельного сопротивления при возбуждении первой излучающей антенны в первом положении излучателя вдоль продольной оси прибора каротажа удельного сопротивления;
образовывать первое измерение на основании первого сигнала;
регистрировать второй сигнал на первой приемной антенне в первом положении приемника вдоль продольной оси прибора каротажа удельного сопротивления при возбуждении второй излучающей антенны во втором положении излучателя вдоль продольной оси прибора каротажа удельного сопротивления; и
образовывать второе измерение на основании второго сигнала;
при этом расстояние между первым положением излучателя и первым положением приемника меньше, чем расстояние между вторым положением излучателя и первым положением приемника.
19. Система по п. 16, в которой вычислительная система может выполнять действия по определению положений границ слоев в реальном времени в процессе операций бурения или операций каротажа зондом на кабеле.
20. Система по п. 19, в которой вычислительная система встроена в прибор каротажа удельного сопротивления и вычислительная система сконфигурирована для работы при расположении в буровой скважине.
| WO 2013048375 A1, 04.04.2013;WO 2012008965 A1, 19.01.2012;WO 2012144981 A1, 26.10.2012 | |||
| US 4899112, 06.02.1990;RU 20100128063 A, 20.01.2012. |

