Изобретение относится к области судовождения, в частности к системам управления программными режимами движения судна по траектории.
Способ может использоваться в судовых и береговых системах управления движением судна по программным траекториям, заданным автоматически на принципах искусственного интеллекта или человеком.
Известны запатентованные способы управления судном по заданной траектории [1-3], в которых сигнал на рулевой привод вырабатывается на основе данных от датчиков руля, угловой скорости, курса и задатчика угла курса - путевого угла, сформированного блоком маршрута по широтам и долготам точек.
Известны также устройство и способ автоматического управления движением судна по расписанию [4], в котором в дополнение к каналу управления рулевым приводом предлагаются каналы регулирования оборотами гребного винта и подруливающими устройствами для обеспечения движения судна по программной траектории в соответствии с заданной скоростью.
Недостатками этих способов являются использование неединообразных выражений для задания маршрута и режимов движения, пренебрежение важными физико-математическими принципами движения:
1. Не учитывается характер воздействий управляющих и внешних сил, скоординированное изменение движений судна (курса, угла дрейфа, линейной скорости) и его маневренные качества.
2. В процессе поворота курс судна изменяется равномерно, не учитывается изменение радиуса кривизны и падение линейной скорости движения судна при повороте.
3. В точках сопряжения прямых линий с дугами окружностей имеются разрывы в первой и второй производных.
4. Не обеспечиваются согласованность и точность отслеживания программных движений и траектории судна.
Известен способ задания согласованных и скоординированных программных движений судна (курс, скорость и угол дрейфа) с помощью универсальных сигмоидоподобных траекторных функций (СПТФ), приведенных в заявке на изобретение А.А. Мироненко (2014016090/11(009667) РФ, МПК В63Н 25/00, В63Н 25/02, положительное решение ФИПС от 13.02.2015. Способ задания траектории и режимов движения судна) [6] в зависимости от пройденного судном расстояния по траектории, программное местоположение судна, задающее траекторию в неподвижной системе координат, определяется вычислителем программных движений (ВПД).
За прототип управления программными движениями судна и отслеживания программной траектории принят способ, предложенный в работе [5] на основе обратных задач динамики. В этом способе формируется и генерируется задающая функция угла поворота (курса) (псевдоуправление) в систему управления курсом (СУК) судна для компенсации отклонений фактических и программных движений:
где ψt - управляющая функция в виде заданного угла поворота (курса) судна, град;  ,
,  - требуемые значения скоростей изменения прямоугольных координат, м/с;
- требуемые значения скоростей изменения прямоугольных координат, м/с;  ,
,  - скорости изменения программных координат, м/с.
- скорости изменения программных координат, м/с.
СУК включает внутренний контур нижнего уровня иерархии - систему управления угловой скоростью поворота (СУУС) судна. Для отработки заданного угла поворота СУК - верхний уровень иерархии управления генерирует управляющую функцию в виде заданной угловой скорости для СУУС - нижнего уровня управления, которая формирует через перекладку руля управляющий момент на судно, обеспечивающий желаемую динамику изменения курса:

где r, rt - текущая и заданная от СУК угловые скорости поворота судна, град/с; ψ - текущее значение курса, град; kc0, kc1 - коэффициенты, определяющие желаемый переходный процесс отслеживания программного движения судна по курсу (углу поворота); δ - угол перекладки руля, вырабатывающий управляющий момент на судно, град; k, k0, Tr=ko -1 - коэффициенты усиления, желаемой динамики и соответствующая постоянная времени СУУС с кратностью n0=k/k0≥4; r0 - начальные условия интегрирования могут не учитываться.
Недостатком прототипа является его реализация при условии постоянной скорости движения судна без учета ее регулирования по плану, изменения от внешних воздействий, падения на поворотах и без взаимосвязи с управлением курсом и скоростью.
Целью предлагаемого способа управления программными движениями судна по траектории является обеспечение безопасности судовождения в стесненных водах. При этом решаются следующие задачи:
1. Задание скоординированных и согласованных гладких программных движений и траекторий с учетом маневренных качеств судна.
2. Создание автоматического управления судном по программной траектории и согласованного отслеживания программных движений.
Для достижения указанной цели в способе управления программными движениями судна по траектории, заключающемся в том, что он является иерархическим, в котором вычислителем программных движений (ВПД) по данным навигационной обстановки и маневренным качествам судна на основе универсальных сигмоидоподобных траекторных функций (СПТФ) формируются программные значения: курс - ψp, прямоугольные координаты траектории движения - Хр, Yp, скорости -  ,
,  и ускорения -
и ускорения -  ,
,  изменения программных координат, которые подаются на вход системы траекторного управления (СТУ), являющейся верхним уровнем иерархии управления, вместе с измеренными кинематическими параметрами движения судна, а именно продольной - u и поперечной - ν составляющими скорости движения, курсом - ψ, прямоугольными координатам - Xg, Yg, ускорениями прямоугольных координат -
изменения программных координат, которые подаются на вход системы траекторного управления (СТУ), являющейся верхним уровнем иерархии управления, вместе с измеренными кинематическими параметрами движения судна, а именно продольной - u и поперечной - ν составляющими скорости движения, курсом - ψ, прямоугольными координатам - Xg, Yg, ускорениями прямоугольных координат -  ,
,  , по ним СТУ определяет управляющий сигнал заданного угла поворота (курса) судна - ψt, который совместно с текущими измеренными значениями угловой скорости поворота - r и курсом - ψ судна подаются в систему управления курсом (СУК), являющуюся нижним уровнем иерархии управления, которая вырабатывает требуемый угол перекладки руля - δ для отслеживания заданного курса - ψt и траектории, а формируемое СТУ требуемое значение скорости - ut совместно с текущей измеренной скоростью - u судна поступает на вход системы управления скоростью (СУС) нижнего уровня иерархии, которая определяет требуемую частоту вращения винта - n для отслеживания заданного скоростного режима движения - ut по траектории, согласно заявляемому изобретению система управления скоростью (СУС) и система управления курсом (СУК) как системы нижнего уровня иерархии управления взаимно согласованы между собой и с вычислителем программных движений (ВПД) и иерархически подчинены системе траекторного управления (СТУ) верхнего уровня иерархии, при этом требуемое значение скорости - ut определяют с учетом программных движений и текущих отклонений судна с учетом угла дрейфа как разности направления вектора скорости - φ и истинного курса - ψ по формулам:
, по ним СТУ определяет управляющий сигнал заданного угла поворота (курса) судна - ψt, который совместно с текущими измеренными значениями угловой скорости поворота - r и курсом - ψ судна подаются в систему управления курсом (СУК), являющуюся нижним уровнем иерархии управления, которая вырабатывает требуемый угол перекладки руля - δ для отслеживания заданного курса - ψt и траектории, а формируемое СТУ требуемое значение скорости - ut совместно с текущей измеренной скоростью - u судна поступает на вход системы управления скоростью (СУС) нижнего уровня иерархии, которая определяет требуемую частоту вращения винта - n для отслеживания заданного скоростного режима движения - ut по траектории, согласно заявляемому изобретению система управления скоростью (СУС) и система управления курсом (СУК) как системы нижнего уровня иерархии управления взаимно согласованы между собой и с вычислителем программных движений (ВПД) и иерархически подчинены системе траекторного управления (СТУ) верхнего уровня иерархии, при этом требуемое значение скорости - ut определяют с учетом программных движений и текущих отклонений судна с учетом угла дрейфа как разности направления вектора скорости - φ и истинного курса - ψ по формулам:



где ut - требуемое значение продольной составляющей скорости движения судна, м/с;  ,
,  - ускорения изменения прямоугольных координат судна, м/с2;
- ускорения изменения прямоугольных координат судна, м/с2;  , - ускорения изменения программных координат, м/с2; kxi, kyi - коэффициенты, определяющие желаемые переходные процессы движения ЦТ судна с учетом ограничений на управляющие воздействия, скорости и ускорения; Xg, Yg - фактические значения координат судна, м, по значениям которых формируется частота вращения винта для отслеживания скорости движения судна по программной траектории с помощью выражения:
, - ускорения изменения программных координат, м/с2; kxi, kyi - коэффициенты, определяющие желаемые переходные процессы движения ЦТ судна с учетом ограничений на управляющие воздействия, скорости и ускорения; Xg, Yg - фактические значения координат судна, м, по значениям которых формируется частота вращения винта для отслеживания скорости движения судна по программной траектории с помощью выражения:

где n - частота вращения винта, м-1; kν, k0ν - коэффициенты усиления и желаемой динамики СУС; u - продольная составляющая измеренной скорости движения судна, м/с; u0 - начальные условия интегрирования, м/с.
Таким образом, управление формируется по согласованной иерархической схеме от координат траектории, на верхнем уровне, к углу поворота - угловой скорости поворота и скорости движения судна, на нижних уровнях.
Желаемые переходные процессы компенсации отклонений управления скоростью движения судна (желаемая динамика системы) как подсистемы нижнего уровня управления задаются уравнением первого порядка:
где k0ν, Tν=ko -1 - коэффициент желаемой динамики и постоянная времени СУС.
Динамические свойства замкнутой СУС судна определяются корнями характеристического уравнения:

где p1, 2 - корни характеристического уравнения замкнутой системы; n0ν=kν/k0ν - кратность коэффициентов усиления СУС и желаемого движения судна.
Техническим результатом предлагаемого изобретения является:
1. Определение программного местоположения судна на траектории в неподвижной системе координат и требуемой скорости - ut с учетом отклонений от программных значений по согласованным физически реализуемым кинематическим параметрам и условиям отслеживания программных движений судна в конфигурации стесненных вод и вариантах получения итоговой кривой (программной траектории движения).
2. Способ автоматического управления судном по программной траектории на основе иерархически и динамически согласованных систем: системы траекторного управления (СТУ) - верхнего уровня иерархии, генерирующей задающие воздействия в систему управления курсом (СУК) и систему управления скоростью (СУС) судна - нижнего уровня иерархии, которые обеспечивают согласованную компенсацию отклонений фактических кинематических параметров от программных движений судна (траектории, курса, линейной скорости движения).
Технический результат заключается в том, что предлагаемая система автоматического управления судном по программной траектории согласованно отслеживает программные движения.
Технический результат предлагаемого изобретения обеспечивает физическую реализацию траекторного управления судном, СУК, СУУС и СУС судна при согласованных параметрах программных движений судна и подсистем управления:
1. Согласно предлагаемому изобретению управления формируются согласованно по программным значениям и текущим измерениям составляющих вектора скорости судна под действием суммарных сил в данный момент, т.е. динамика судна восстанавливается по текущим измерениям фактического движения.
2. Постоянные времени переходных процессов внешних контуров управления по иерархии должны быть значительно больше постоянных времени внутренних контуров управления, которые оцениваются по стандартным натурным маневренным качествам судна [5, 6]


где Tψ, Тν, Tx, Ty, ξx, ξy, ξψ - постоянные времени и коэффициенты затухания переходных процессов контуров управления СУК, СУС и СТУ.
3. При кратности коэффициентов больше четырех (n0≥4, n0ν≥4) корни характеристических уравнений замкнутых СУУС и СУС будут действительными, а переходные процессы апериодическими (без колебаний).
4. Точность отслеживания значений угловой скорости поворота и линейной скорости обеспечивается выбором коэффициента усиления замкнутых СУУС и СУС из расчета более высокого быстродействия внутренних контуров управления относительно внешних (k>>k0, kν>>k0ν).
5. Устойчивость СУК судна с наиболее быстродействующими переходными процессами с нулевым перерегулированием получается из следующих соотношений коэффициентов усиления управлений:

Технический результат обеспечивается тем, что способ управления программным движением судна по траектории содержит иерархически и динамически согласованные контуры управления по выражениям (5)-(7). На верхнем уровне иерархии находится система траекторного управления (СТУ), которая формирует задающую функцию компенсации отклонений судна от программных движений, согласованной с динамическими свойствами систем нижнего уровня иерархии управления (5), (6). По задающим воздействиям система управления курсом (СУК), СУУС обеспечивает соответствующее изменение курса судна для выхода на программную траекторию, а система управления скоростью (СУС) судна обеспечивает соответствующее изменение скорости судна для поддержания запланированного режима движения. Система управления курсом (СУК) включает свой внутренний контур системы управления угловой скоростью поворота (СУУС) - нижнего уровня иерархии. Изменения курса с соответствующей угловой скоростью и скорости движения согласованы с программным режимом движения и динамическими свойствами судно - системы управления по выражениям (5)-(7).
Сущность изобретения состоит в том, что решение задачи отслеживания программных движений и траектории судна осуществляется иерархически и динамически по выражениям (5)-(7) согласованными контурами управления от верхнего к нижнему уровню: координаты траектории - СТУ, курс - СУК, угловая скорость поворота - СУУС, линейная скорость судна - СУС.
Заявленное изобретение отличается от ранее заявленного изобретения [6] тем, что формируются программные координаты траектории движения судна и условия отслеживания этих движений, которые задаются следующими выражениями:
где up, νp - продольная и поперечная программные значения скорости судна, м/с;  ,
,  - скорости изменения программных координат, м/с; Vg - скорость судна относительно грунта, м/с; φ - направление вектора перемещения центра тяжести (ЦТ) судна относительно грунта, град; Xg0, Yg0, Хр, Yp - начальные и программные неподвижные координаты судна, м; t - время.
- скорости изменения программных координат, м/с; Vg - скорость судна относительно грунта, м/с; φ - направление вектора перемещения центра тяжести (ЦТ) судна относительно грунта, град; Xg0, Yg0, Хр, Yp - начальные и программные неподвижные координаты судна, м; t - время.
Дополнительные условия отслеживания программных движений судна определяются равенством проекций измеряемых скоростей движения на неподвижные координатные оси соответствующим программным значениям, которые при отсутствии крена и дифферента принимают вид выражений:

где  ,
,  - текущие скорости изменения координат, м/с; u, ν - продольное и поперечное текущие значения скорости судна, м/с.
- текущие скорости изменения координат, м/с; u, ν - продольное и поперечное текущие значения скорости судна, м/с.
Заявленное изобретение отличается от прототипа [5] дополнительным параллельным каналом управления - системой управления скоростью (СУС) судна (4) по требуемой скорости - ut с учетом отклонений от программных значений, иерархически согласованными каналами управления: системой траекторного управления (СТУ), системой управления курсом (СУК) с системой управления угловой скоростью поворота (СУУС).
Сущность изобретения поясняется графическими материалами, где показаны:
Фиг. 1. Структурная схема управления судном по программной траектории: СУК - система управления курсом; r - измеренная угловая скорость и ψ -курс судна; ψt - заданный угол поворота (курс) судна; δ - угол перекладки руля; СУС - система управления скоростью; ut - продольная составляющая требуемой скорости; u - продольная составляющая измеренной скорости движения судна; n - частота вращения винта; судно - объект управления; Xg, Yg - неподвижные прямоугольные координаты судна;  ,
,  - ускорения изменений прямоугольных координат судна; ВПД - вычислитель программных движений; Хр, Yp - прямоугольные программные координаты траектории движения;
- ускорения изменений прямоугольных координат судна; ВПД - вычислитель программных движений; Хр, Yp - прямоугольные программные координаты траектории движения;  ,
,  - скорости изменения программных координат;
- скорости изменения программных координат;  ,
,  - ускорения изменений программных координат; ψр - программные значения курса; СТУ - система траекторного управления.
- ускорения изменений программных координат; ψр - программные значения курса; СТУ - система траекторного управления.
Фиг. 2. Структурная схема системы управления курсом (СУК) с внутренним контуром управления угловой скоростью поворота (СУУС) судна: r - измеренная угловая скорость; ψ - измеренный курс; ψt - заданный угол поворота (курс) судна; rt - заданная угловая скорость; δ - угол перекладки руля; k - коэффициенты усиления СУУС; k0 - коэффициент желаемой динамики СУУС; r0 - начальные условия интегрирования; kc0, kc1 - коэффициенты желаемой динамики СУК.
Фиг. 3. Структурная схема системы управления скоростью (СУС) судна: ut - продольная составляющая требуемой скорости судна; u - продольная составляющая измеренной скорости судна; n - частота вращения винта; kν -коэффициент усиления СУС; k0ν - коэффициент желаемой динамики СУС; uo - начальные условия интегрирования.
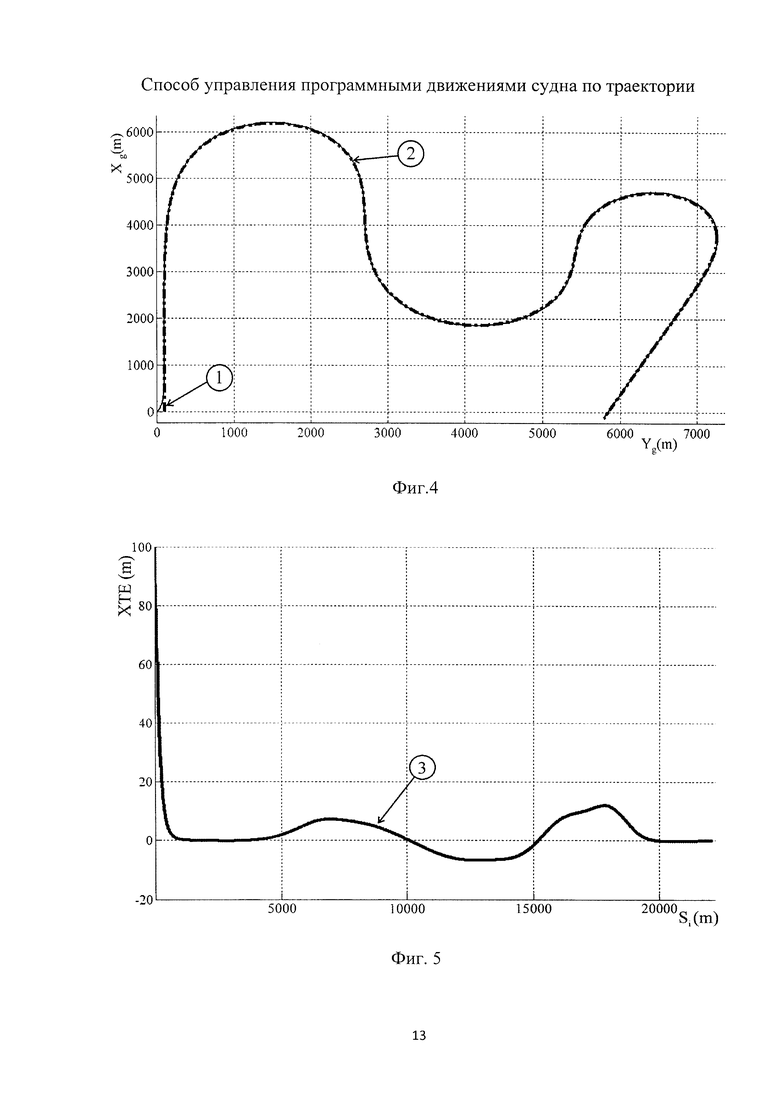
Фиг. 4. Отслеживание программной траектории при поворотах, разгонах и торможениях судна: 1 - программная траектория движения; 2 - фактическая траектория движения.
Фиг. 5. Точность отслеживания программной траектории при поворотах, разгонах и торможениях судна от заданного начального смещения: 3 - ХТЕ - боковое смещение от программной траектории.
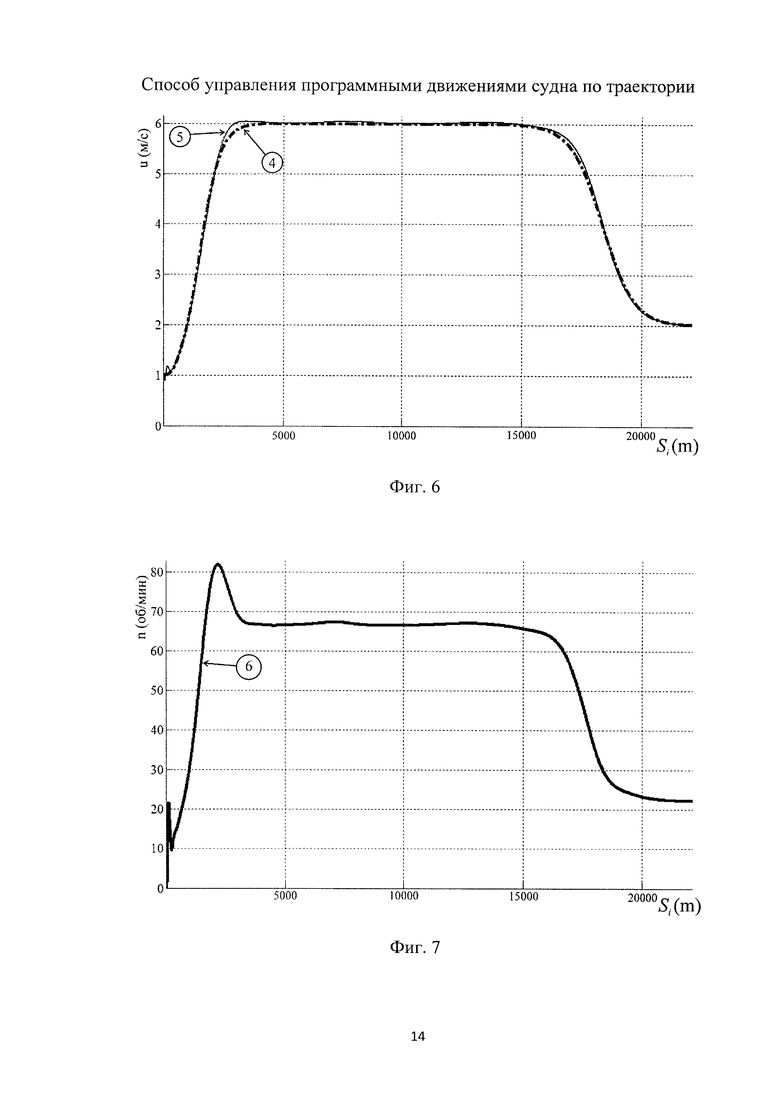
Фиг. 6. Режим отслеживания программных значений скорости при поворотах, разгонах и торможениях судна: 4 - требуемая скорость движения (u1); 5 - измеренная скорость движения (u).
Фиг. 7. Изменение частоты вращения винта для отслеживания программных значений скорости при поворотах, разгонах и торможениях судна: 6 - частота вращения винта (n).
Положительный эффект предлагаемого изобретения заключается в том, что в отличие от других известных аналогичных решений учтены требования, налагаемые на свойства кривых, используемых при аппроксимации программных движений и их отслеживании иерархически согласованной системой управления:
- координаты точек траектории и скорости их изменения лежат в пределах физических ограничений маневрирования, учитывающих динамические свойства судна и исполнительных устройств (винт, руль) и дважды непрерывно-дифференцируемы;
- динамические свойства системы управления судном иерархически согласованы с взаимосвязанными программными движениями, траекторией, отклонениями от нее и условиями плавания.
Использование предлагаемого изобретения повысит качество задания маршрута плавания судна и его отслеживание, безопасность и эффективность выполнения маневров в стесненных водах.
Источники информации
1. Патент 2292289 РФ, МПК7 В63Н 25/04, G05D 1/00. Способ автоматического управления движением судна [Текст] / Острецов Г.Э., Клячко Л.М., Белогорцева М.В.; ИЛУ РАН им. В.А. Трапезникова. Опубл. 27.01.07.
2. Патент 2452655 РФ, МПК7 В63Н 25/04. Способ автоматического управления движением судна [Текст] / Острецов Г.Э., Клячко Л.М.; ИЛУ РАН им. В.А. Трапезникова. Опубл. 10.06.12, Бюл. №16.
3. Патент 2483973 РФ, МПК7 В63Н 25/04. Способ управления движением судна по заданной траектории [Текст] / Острецов Г.Э., Клячко Л.М., Памухин С.Г.; ИЛУ РАН им. В.А. Трапезникова. Опубл. 10.06.13, Бюл. №16.
4. Патент 2525606 РФ, МПК7 В63Н 25/04, G05D 1/00. Устройство и способ автоматического управления движением судна по расписанию [Текст] / Клячко Л.М., Острецов Г.Э.; ИЛУ РАН им. В.А. Трапезникова. Опубл. 20.08.14, Бюл. №23.
5. Васьков А.С. Методологические основы управления движением судна и конфигурацией зоны навигационной безопасности [Текст] / Автореф. дисс. на соиск. уч. ст. д.т.н. - СПб.: ГМА им. адм. С.О. Макарова, 1998. - 48 с. (прототип).
6. Заявка 201406090/11(009667) Российская Федерация, МПК В63Н 25/00, В63Н 25/02. Способ задания траектории и режимов движения судна [Текст] / Мироненко А.А.; Государственный морской университет имени адмирала Ф.Ф. Ушакова. - №201406090/11(009667); заявл. 18.02.2014; Положительное решение ФИПС от 13.02.2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отслеживания запланированного маршрута морского подвижного объекта | 2018 |
|
RU2703338C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| Способ управления угловой скоростью судна-катамарана при "сильных" маневрах | 2018 |
|
RU2693403C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |

Изобретение относится к способу управления движением судна. Для управления программными движениями судна по траектории вычислитель программных движений формирует курс, координаты траектории движения, скорость и ускорение изменения координат, измеряют кинематические параметры движения судна, а именно продольную и поперечную составляющие скорости судна, курс, прямоугольные координаты судна, сформированные и измеренные значения подают на вход системы траекторного управления (СТУ), определяют управляющий сигнал заданного поворота судна, вырабатывают требуемый угол перекладки руля, формируют требуемое значение скорости, которое определяют с учетом программных движений и текущих отклонений, а также разности направлений вектора скорости и истинного курса судна определенным образом, определяют требуемое значение вращения винта для отслеживания заданного скоростного режима движения по траектории. Обеспечивается траекторное управление судном при согласованном отслеживании его программных движений. 7 ил.
Способ управления программными движениями судна по траектории, заключающийся в том, что он является иерархическим, в котором вычислитель программных движений (ВПД) по данным навигационной обстановки и маневренным качествам судна на основе универсальных сигмоидоподобных траекторных функций (СПТФ) формирует курс, координаты траектории движения, скорости и ускорения изменения координат, которые подаются на вход системы траекторного управления (СТУ), являющейся верхним уровнем иерархии управления, вместе с измеренными кинематическими параметрами движения судна, а именно продольной и поперечной составляющими скорости движения судна, курсом, прямоугольными координатам судна, ускорениями прямоугольных координат судна, по которым СТУ определяет управляющий сигнал заданного угла поворота (курса) судна, который совместно с текущими измеренными значениями угловой скорости поворота и курсом судна подается в систему управления курсом (СУК), являющуюся нижним уровнем иерархии управления, которая вырабатывает требуемый угол перекладки руля для отслеживания заданного курса и траектории, а формируемое СТУ требуемое значение скорости совместно с текущей измеренной скоростью судна поступает на вход системы управления скоростью (СУС) нижнего уровня иерархии, которая определяет требуемую частоту вращения винта для отслеживания заданного скоростного режима движения по траектории, отличающийся тем, что система управления скоростью (СУС) и система управления курсом (СУК) как системы нижнего уровня иерархии управления взаимно согласованы с вычислителем программных движений (ВПД) и иерархически подчинены системе траекторного управления (СТУ) верхнего уровня иерархии, при этом требуемое значение скорости определяют с учетом программных движений и текущих отклонений, разности направлений вектора скорости и истинного курса судна по формулам:
где ut - требуемое значение продольной составляющей скорости движения судна, м/с;
 - требуемые значения скоростей изменения прямоугольных координат, м/с;
- требуемые значения скоростей изменения прямоугольных координат, м/с;
 - ускорения изменения прямоугольных координат судна, м/с2;
- ускорения изменения прямоугольных координат судна, м/с2;
 - ускорения изменения программных координат, м/с2;
- ускорения изменения программных координат, м/с2;
kxi, kyi - коэффициенты, определяющие желаемые переходные процессы движения ЦТ судна с учетом ограничений на управляющие воздействия, скорости и ускорения;
Xg, Yg - фактические значения координат судна, м;
Хр, Yp - прямоугольные программные координаты траектории движения, м;
φ - направление вектора перемещения центра тяжести (ЦТ) судна относительно грунта, град;
ψ - текущее значение истинного курса судна, град,
по значениям которых формируется частота вращения винта для отслеживания скорости движения судна по программной траектории:

где n - частота вращения винта, м-1; kv, k0v - коэффициенты усиления и желаемой динамики СУС; u - продольная составляющая измеренной скорости движения судна, м/с; u0 - начальные условия интегрирования, м/с.
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2010 |
|
RU2442718C1 |
| JP 2012210875 A, 01.11.2012 | |||
| US 3946690 A1, 30.03.1976. | |||

