Изобретение относится к области натурных испытаний автономных необитаемых подводных аппаратов с целью проверки точности их навигации и траекторных возможностей подводного передвижения в акватории морского испытательного полигона.
Необходимая точность навигации автономных необитаемых подводных аппаратов (АНПА) в настоящее время обеспечивается путем комплексирования данных счисления бортовой инерциальной навигационной системы с текущей коррекцией счисленных данных от внешних навигационных систем. Для коррекции используются спутниковые навигационные системы (СНС) на поверхности и гидроакустические - в подводном положении. Последние отличаются конфигурацией гидроакустического оборудования, реализуемого в виде опорных маяков с известными или контролируемыми геодезическими координатами.
При проектировании, изготовлении и отладке АНПА решаются задачи оценки точности как отдельных элементов навигационных систем, так и навигационных комплексов в целом. Необходимые для этого работы невозможно выполнить в полном объеме в лабораторных условиях, поэтому их значительная часть соотносится с натурными испытаниями на специально оборудованных морских полигонах.
Известен специализированный полигон [1] института проблем морских технологий ДВО РАН, оборудованный в мелководной бухте, координаты ключевых точек которого определены геодезическими методами. В этих ключевых точках размещены три маяка-ответчика и две управляющие антенны, которые являются абонентами гидроакустической навигационной системы (ГНС) с длинной базой. В ходе испытаний эти устройства реализуют функции постоянно действующих стационарных измерительных дальне-мерных трасс в акватории движения АНПА, выполняющего проверку своих навигационных средств.
Накопление измеряемых дальномерных данных по трем трассам (антенна - маяки) с оценкой эффективных скоростей распространения сигналов по различным направлениям в акватории позволяет получить достаточно точную оценку координат АНПА. При точной координатной привязке ключевых точек в условиях такого полигона можно выполнять проверку точности навигации различных АНПА.
Для коррекции счисленных координат АНПА используют данные ГНС с длинной базой. Скорость звука на АНПА определяют в режиме реального времени измерителем параметров среды.
Запуск АНПА осуществляют на испытательном полигоне в условиях глубин от 6 до 20 м. Программная траектория представляет собой циклическое движение по квадрату со стороной 300 м с двухмерной координатной привязкой. Средняя скорость передвижения АНПА составляет порядка 1 м/с. Коррекцию счисленных координат при движении осуществляют на АНПА по данным ГНС с периодом около 30 с. Оценку точности навигации выполняют в ходе постобработки полученных траекторных данных.
К недостаткам вышеописанного трехмаякового способа полигонной проверки точности навигации АНПА следует отнести:
1) необходимость выполнения трудоемких и продолжительных по времени работ, связанных с установкой и привязкой к геодезическим координатам акватории испытательного полигона местоположения подводных маяков-ответчиков и антенн ГНС с длинной базой перед испытаниями АНПА;
2) достаточно большое время коррекции счисленных координат АНПА по данным ГНС во время движения, что ограничивает скорость и характер траекторий передвижения АНПА в акватории испытательного полигона;
3) отсутствие возможности оперативного визуального контроля подводных перемещений АНПА, транспонированных на поверхность акватории испытательного полигона, в процессе проверки возможных траекторий его передвижения, обеспечиваемых системой управления движительно-рулевого комплекса;
4) значительные затраты времени на постобработку полученных на АНПА траекторных данных, снижающие оперативность используемого способа.
Известен одномаяковый [2] способ навигации АНПА, называемый еще способом синтезированной длинной базы, который может служить способом-прототипом.
Суть способа состоит в измерении на последовательных интервалах времени наклонного расстояния между мобильным надводным маяком и движущимся в подводном положении АНПА и использовании его для коррекции счисления местоположения АНПА по курсу и скорости, периодически измеряемых бортовыми средствами АНПА.
Способ имеет ряд разновидностей использования. Применительно к полигонным испытаниям он состоит в том, что АНПА сопровождает безэкипажное надводное судно (БНС), например, мини катер или глайдер, который периодически определяет свое местоположение в акватории полигона с использованием СНС и передает свои текущие координаты на АНПА. Во время гидроакустического модемного обмена сигналами определяют время распространения сигнала от БНС до АНПА и, как следствие, -наклонное расстояние между ними. Зная глубину погружения АНПА, измеряемую с высокой точностью, на АНПА наклонное расстояние пересчитывают в горизонтальное, зависящее от текущего местоположения БНС в акватории полигона. Это расстояние совместно с курсом и скоростью АНПА используют для коррекции пути АНПА.
Способ одномаяковой полигонной навигации лишен первого, весьма существенного, недостатка трехмаяковой навигации, второй недостаток которой может быть устранен уменьшением интервала времени между измерениями геодезических координат БНС с использованием СНС, но остаются третий и четвертый функционально значимые недостатки способа, снижающие его технико-эксплуатационную эффективность.
Техническая реализация способа одномаяковой полигонной навигации при проверке точности навигации АНПА основана на следующих базовых процессах.
АНПА, оснащенный гидроакустическим модемом и бортовыми средствами навигации, включающими в себя инерциальную навигационную систему, датчик глубины и измеритель скорости звука, движется в подводном положении между двумя реперными точками акватории испытательного полигона с известными геодезическими координатами по предварительно запрограммированному маршруту. С помощью указанных средств навигации периодически оценивают курс АНПА, ортогональные составляющие путевой скорости его движения, глубину акватории. Эти данные используют для счисления пути АНПА в акватории испытательного полигона.
На БНС, оснащенном приемником сигналов СНС и гидроакустическим модемом, передвигающимся в пределах акватории испытательного полигона и являющимся навигационным маяком, периодически по сигналам СНС оценивают геодезические координаты БНС в акватории испытательного полигона и осуществляют модемный обмен гидроакустическими сигналами между БНС и АНПА, в процессе которого на АНПА передают текущие геодезические координаты БНС с измерением на АНПА времени распространения акустического сигнала между БНС и АНПА.
На АНПА по времени распространения акустического сигнала между БНС и АНПА и предварительно измеренной скорости звука в акватории испытательного полигона определяют наклонное расстояние между БНС и АНПА, затем с учетом измеренной глубины погружения АНПА вычисляют горизонтальное расстояние между БНС и АНПА, которое совместно с курсом, скоростью АНПА и переданными геодезическими координатами БНС используют для коррекции пути АНПА в акватории испытательного полигона.
После прибытия в конечную точку маршрута и подъема АНПА на поверхность осуществляют постобработку траекторных данных, которая включает в себя две процедуры: обработку данных счисления пути бортовых навигационных средств АНПА для определения траектории его передвижения и оценку отклонений полученного маршрута от исходно запрограммированного, характеризующих точность навигации АНПА.
Технико-эксплуатационным результатом предлагаемого способа является возможность оперативного визуального контроля с берегового поста или иного места наблюдения двухмерной траектории подводного перемещения АНПА, транспонированной на поверхность акватории испытательного полигона, в процессе проверки возможных траекторий его передвижения и сокращение времени постобработки траекторных данных при проверке точности навигации АНПА.
Данный технико-эксплуатационный результат достигается за счет того, что в способе проверки на морском полигоне точности навигации АНПА, оснащенного штатным оборудованием соответствующего функционального состава, заключающемся в организации подводного передвижения АНПА по запрограммированному маршруту между двумя реперными точками акватории испытательного полигона с известными геодезическими координатами в присутствии БНС, при этом навигацию АНПА обеспечивают его гидроакустическим модемом для обмена сообщениями с БНС, бортовыми средствами навигации, включающими в себя инерциальную навигационную систему и датчик глубины, для периодической оценки курса, ортогональных составляющих путевой скорости, глубины погружения, используемых для счисления пути в акватории испытательного полигона, БНС, выполняющим функцию навигационного маяка, с оснащением его движительно-рулевым комплексом для передвижения в акватории испытательного полигона, приемником сигналов СНС для геодезического позиционирования, гидроакустическим модемом для передачи геодезических координат на АНПА, которые совместно с курсом, ортогональными составляющими путевой скорости, глубиной погружения АНПА используют для коррекции счисления его пути, в выполнении после прибытия АНПА в конечную реперную точку маршрута постобработки траекторных данных для оценки точности навигации, состоящей в построении траектории маршрута АНПА на испытательном полигоне по данным используемых навигационных средств и определении ее отклонений от траектории запрограммированного маршрута, характеризующих точность навигации АНПА, осуществляют скоординированное движение БНС и АНПА по двухмерной траектории запрограммированного маршрута в акватории испытательного полигона, реализуемое дооснащением АНПА гидроакустическим маяком-пингером - источником периодического навигационного сигнала для гидроакустического позиционирования относительно БНС, дооснащением БНС съемным устройством хранения данных для записи и хранения текущих маршрутных данных, инерциальной навигационной системой для определения курса с ортогональными составляющими путевой скорости движения в акватории испытательного полигона, гидроакустическим фазовым пеленгатором с четырехэлементной антенной диаметрально-ортогональной геометрии, согласованной с курсом БНС и имеющей расстояние между парами приемных гидрофонов в горизонтальной плоскости в два раза превышающее расстояние между парами приемных гидрофонов в вертикальной плоскости, являющееся базовым установочным размером антенны, для гидроакустического позиционирования АНПА с периодичностью излучения его маяка-пингера путем определения в системе координат пеленгационной антенны БНС пеленга, угла места АНПА, горизонтального расстояния по курсу между БНС и АНПА без необходимости измерения скорости звука в акватории испытательного полигона, причем частоту гармонического навигационного сигнала маяка-пингера АНПА выбирают из условия фазовой однозначности пеленгования, передачей с периодичностью гидроакустического позиционирования АНПА посредством гидроакустического модема с АНПА на БНС сообщений о курсе, ортогональных составляющих путевой скорости движения, глубине погружения АНПА, совмещением курсов и выравниванием путевых скоростей БНС и АНПА посредством системы управления движительно-рулевого комплекса БНС на основе сопоставления курсовых, скоростных и траекторных параметров подводного передвижения АНПА и надводного передвижения БНС в акватории испытательного полигона, передают посредством гидроакустического модема с БНС на АНПА с периодичностью геодезического позиционирования БНС, кратно превышающей периодичность гидроакустического позиционирования АНПА, помимо сообщений о геодезических координатах БНС сообщения о горизонтальном расстоянии по курсу между БНС и АНПА, необходимом наряду с геодезическими координатами БНС, курсом, ортогональными составляющими путевой скорости, глубиной погружения АНПА для коррекции счисления его пути в акватории испытательного полигона, записывают в процессе скоординированного движения АНПА и БНС по запрограммированному маршруту с периодичностью геодезического позиционирования БНС в съемное устройство хранения данных БНС текущие маршрутные данные: геодезические координаты БНС и глубины погружения АНПА, на основе которых при постобработке траекторных данных выстраивают траекторию маршрута АНПА в акватории испытательного полигона.
Существенными отличиями предлагаемого способа являются: использование БНС в качестве поверхностного индикатора подводного перемещения АНПА в акватории испытательного полигона, отсутствие необходимости измерения скорости звука в акватории испытательного полигона при осуществлении навигации АНПА и исключение из постобработки траекторных данных процедуры определения траектории передвижения АНПА в акватории испытательного полигона, связанной с обработкой данных счисления пути бортовых средств навигации, выполняемой после подъема АНПА на поверхность.
Совокупность существенных признаков предлагаемого способа имеет причинно-следственную связь с достигаемым результатом, из чего можно заключить, что предлагаемый способ является новым, обладает изобретательским уровнем, так как явным образом не следует из известных технических решений, и пригоден для практического применения.
Предлагаемый способ поясняется чертежами.
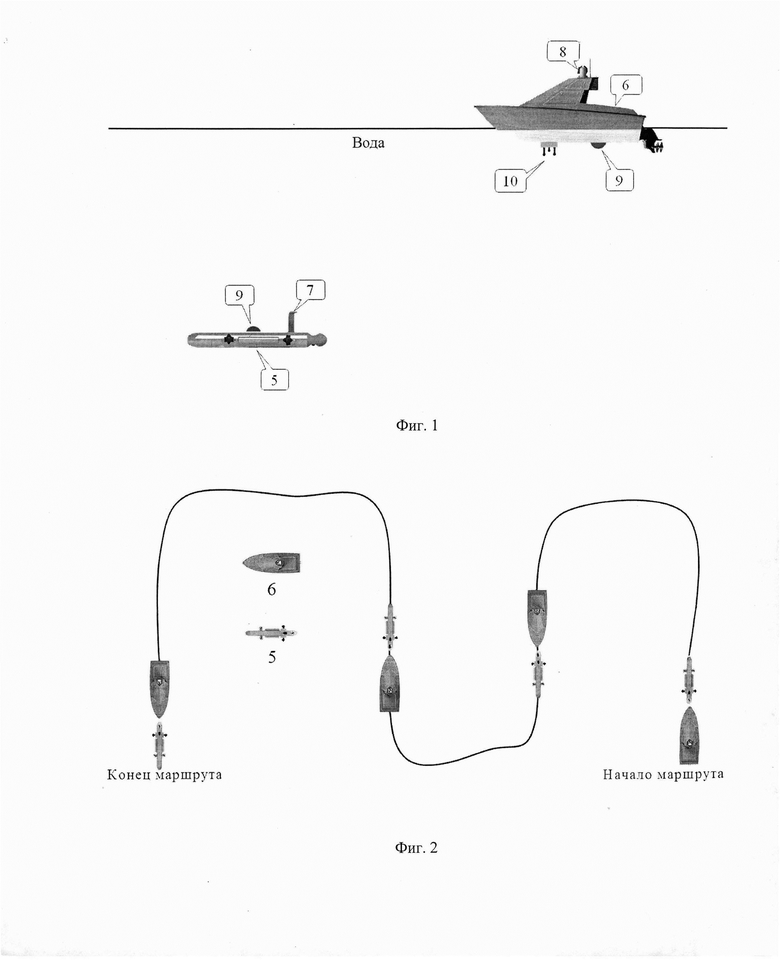
Фиг. 1 иллюстрирует возможное размещение антенн средств навигации и информационного обмена АНПА и БНС, где 5 - АНПА; 6 - БНС; 7 - антенна маяка-пингера; 8 - антенна СНС; 9 - антенны гидроакустического модема; 10 - антенна фазового пеленгатора.
На фиг. 2 представлен пример возможного скоординированного передвижения АНПА 5 и БНС 6 по запрограммированному маршруту акватории испытательного полигона.
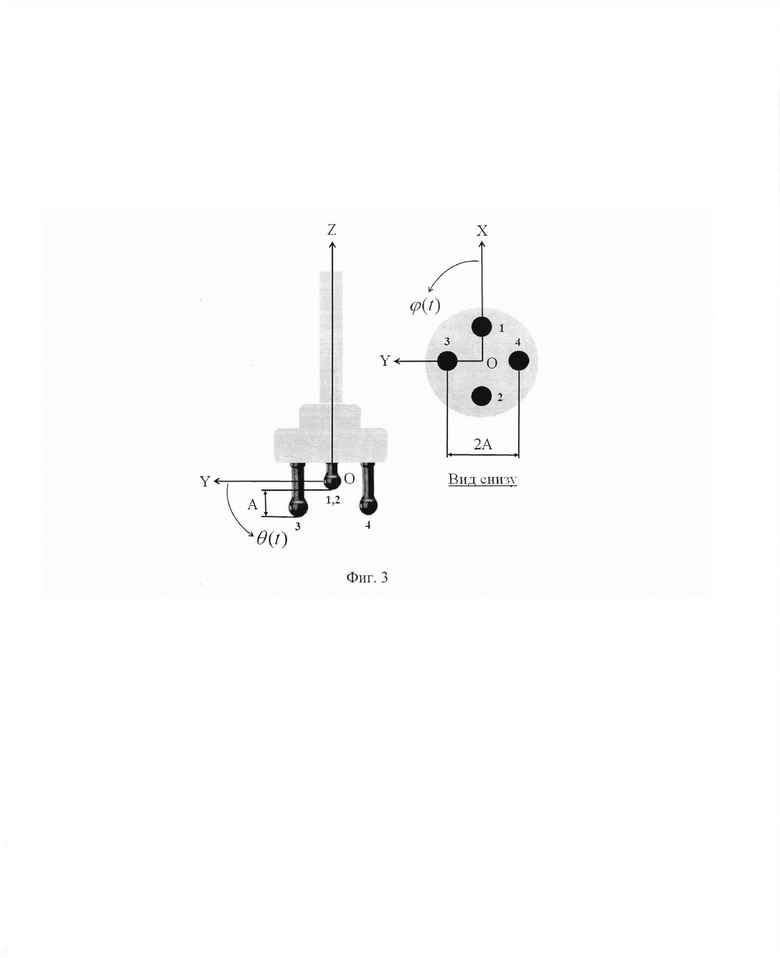
На фиг. 3 показан схематичный вариант четырехэлементной антенны диаметрально-ортогональной геометрии фазового пеленгатора, устанавливаемой на БНС для гидроакустического позиционирования АНПА, где X, Y, Z - декартова система координат; А - базовый установочный размер антенны; ϕ(t), θ(t) - текущие пеленг и угол места АНПА; 1, 2, 3, 4 - приемные гидрофоны пеленгационной антенны.
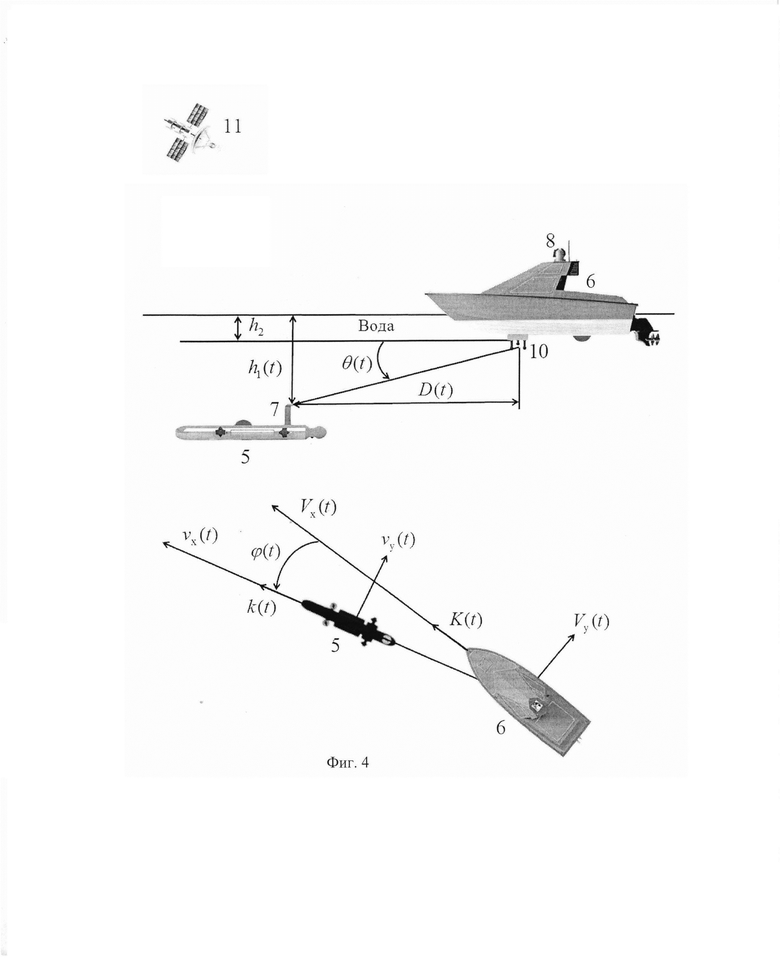
Фиг. 4 поясняет измеряемые курсовые, скоростные и траекторные параметры, используемые в процессе осуществления скоординированного движения БНС и АНПА в акватории испытательного полигона, где 5 - АНПА; 6 - БНС; 8 - антенна СНС; 11 - спутник навигационной системы, например, ГЛОНАСС или GPS; ϕ(t), θ(t) - текущие пеленг и угол места АНПА; D(t) - текущее горизонтальное расстояние по курсу между БНС и АНПА; h1(t) - текущая глубина погружения АНПА; h2 - априорно известная глубина погружения антенны фазового пеленгатора БНС; K(t) - текущий курс БНС; k(t) - текущий курс АНПА; Vx(t), Vy(t) - текущие курсовая и бортовая скорости БНС; νx(t), νy(t) - текущие курсовая и бортовая скорости АНПА.
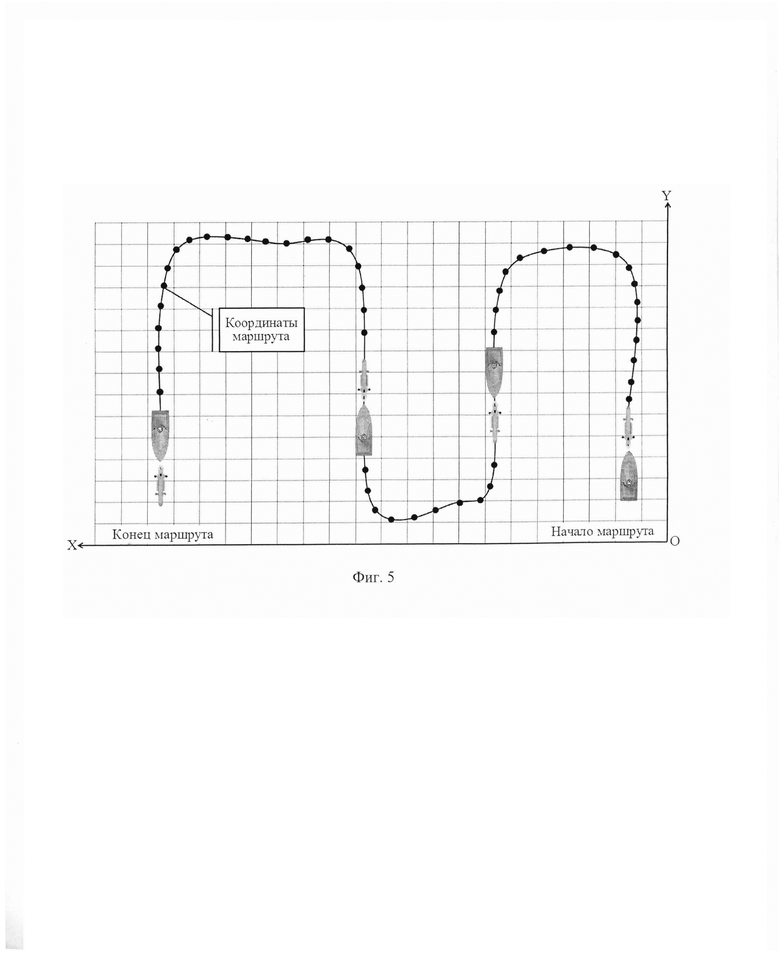
На фиг. 5 приведен пример двухмерного отображения возможной траектории передвижения АНПА, в декартовой системе координат XOY акватории испытательного полигона, построенной по результатам постобработки траекторных данных.
Рассмотрим базовые процессы предлагаемого способа.
АНПА 5 со штатным движительно-рулевым комплексом, гидроакустическим модемом и бортовыми средствами навигации, включающими в себя инерциальную навигационную систему и датчик глубины, дополнительно оснащают гидроакустическим маяком-пингером - источником периодического навигационного сигнала, а на БНС 6 с движительно-рулевым комплексом, приемником сигналов СНС и гидроакустическим модемом дополнительно устанавливают съемное устройство хранения данных, инерциальную навигационную систему и гидроакустический фазовый пеленгатор с четырехэлементной антенной 10 диаметрально-ортогональной геометрии. Возможное размещение антенны 7 маяка-пингера, антенны 8 СНС, антенн 9 гидроакустического модема, антенны 10 гидроакустического фазового пеленгатора иллюстрируется фиг. 1.
Осуществляют с помощью вышеуказанных средств управления движением, навигации и информационного обмена скоординированное передвижение АНПА 5 (в подводном положении) и БНС 6 (в надводном положении) по двухмерной траектории запрограммированного маршрута между двумя реперными точками акватории испытательного полигона с известными геодезическими координатами (фиг. 2).
Навигацию АНПА в сочетании с скоординированным передвижением АНПА и БНС в акватории испытательного полигона реализуют следующим образом.
На АНПА 5 посредством инерциальной навигационной системы и датчика глубины периодически оценивают текущие навигационные параметры движения АНПА 5 - курс k(t), курсовую νх(t) и бортовую νy(t) скорости, являющиеся ортогональными составляющими путевой скорости ν(t), глубину погружения h1(t), которые используют для счисления его пути по запрограммированному маршруту акватории испытательного полигона и передают с помощью гидроакустического модема на БНС 6.
На БНС 6 посредством гидроакустического фазового пеленгатора с четырехэлементной антенной 10 диаметрально-ортогональной геометрии периодически осуществляют позиционирование АНПА относительно БНС, в процессе которого оценивают текущие пеленг ϕ(t), угол места θ(t) АНПА, горизонтальное расстояние D(t) по курсу между БНС и АНПА в системе координат его пеленгационной антенны (фиг. 3, фиг. 4).
Для гидроакустического позиционирования АНПА выбирают способ [3], позволяющий оценивать угловые координаты позиционируемого объекта с погрешностью менее одного градуса. В фазовом пеленгаторе БНС используют антенну диаметрально-ортогональной геометрии 10 [4] с соотношением размеров 2А/А (А - базовый установочный размер антенны на фиг. 3), согласованную с курсом БНС 6 (курс БНС совпадает с осью координат X на фиг. 3) и частотой ƒ гармонического навигационного сигнала маяка-пингера АНПА, которую выбирают из условия фазовой однозначности пеленгования: ƒ≤Cmin/4А, где Cmin - априорно известная минимальная скорость звука в морской воде. При этом текущие пеленг ϕ(t) и угол места θ(t) АНПА определяют по следующим тригонометрическим формулам [5]:

где Δψ12(t), Δψ13(t), Δψ14(t) являются текущими инструментально измеренными разностями фаз колебаний навигационного сигнала маяка-пингера АНПА для соответствующих пар парциальных трактов приема (выходов приемных гидрофонов 1-2, 1-3, 1-4 на фиг. 3) фазового пеленгатора БНС.
Как видно из соотношений (1) и (2) для оценки угловых координат АНПА 5 не требуется знание скорости звука в акватории испытательного полигона, что позволяет исключить погрешность измерения скорости звука при оценке пеленга и угла места АНПА, повышая точность позиционирования.
По рассчитанному углу места θ(t) и переданной с АНПА 5 на БНС 6 текущей глубине погружения h1(t) АНПА оценивают текущее горизонтальное расстояние D(t) по курсу между БНС и АНПА (см. фиг. 4):

где h2 - априорно известная глубина погружения антенны фазового пеленгатора БНС.
Периодичность излучения навигационного сигнала маяка-пингера АНПА (периодичность гидроакустического позиционирования АНПА) согласовывают с периодичностью передачи с АНПА на БНС сообщений о курсе k(t), курсовой νx(t) и бортовой νy(t) скоростях, являющихся ортогональными составляющими путевой скорости АНПА  глубине погружения h1(t).
глубине погружения h1(t).
На БНС 6, используя СНС с антенной 8 и спутником 11 навигационной системы (см. фиг. 4), периодически выполняют геодезическое позиционирование БНС в акватории испытательного полигона с оценкой геодезических координат, а с помощью инерциальной навигационной системы оценивают курс K(t), курсовую Vx(t) и бортовую Vy(t) скорости, являющиеся ортогональными составляющими путевой скорости БНС 
С помощью системы управления движительно-рулевого комплекса БНС 6 совмещают курсы k(t)=K(t), ϕ(t)=0 и выравнивают путевые скорости БНС 6 и АНПА 5 ν(t)=V(t) на основе сопоставления курсовых k(t) и K(t), скоростных ν(t) и V(t) и траекторных ϕ(t) и D(t) параметров их передвижения (см. фиг. 4) в акватории испытательного полигона.
Скоординированное движение АНПА 5 и БНС 6 по двухмерной траектории описывается системой из пяти интегральных уравнений, используемых в итеративном алгоритме системы управления движительно-рулевого комплекса БНС:

где T - время усреднения курсовых, скоростных и траекторных параметров движения АНПА 5 и БНС 6; D0 - установочное, минимально допустимое, горизонтальное расстояние по курсу между АНПА и БНС, которое выбирают с учетом мест размещения антенны 7 маяка-пингера АНПА 5 и антенны 10 фазового пеленгатора БНС 6 и поддерживают постоянным D0=D(t) в процессе скоординированного передвижения АНПА 5 и БНС 6 в акватории испытательного полигона.
В процессе скоординированного движения АНПА 5 и БНС 6 по запрограммированному маршруту с БНС 6 на АНПА 5 посредством гидроакустического модема с периодичностью геодезического позиционирования БНС 6 передают сообщения о геодезических координатах БНС 6 и горизонтальном расстоянии D(t) по курсу между БНС 6 и АНПА 5, которые совместно с ортогональными составляющими путевой скорости ν(t) и курсом k(t) АНПА 5 используют для коррекции счисления его пути в акватории испытательного полигона.
Периодичность геодезического позиционирования БНС 6 выбирают кратно превышающей периодичность гидроакустического позиционирования АНПА 5 с целью обеспечения завершения процессов итеративного корректирования движения БНС 6 по результатам гидроакустического позиционирования АНПА 5 и совмещения по времени оценок геодезических координат БНС 6 и глубины погружения АНПА 5, которые записывают с периодичностью геодезического позиционирования БНС 6 в съемное устройство хранения данных БНС 6 в процессе скоординированного передвижения АНПА 5 и БНС 6 в акватории испытательного полигона.
После прибытия АНПА 5 в конечную реперную точку запрограммированного маршрута по траекторным данным скоординированного движения АНПА 5 и БНС 6, записанным в съемное устройство хранения данных БНС 6, выстраивают трехмерную или двухмерную (фиг. 5) траекторию движения АНПА 5 в акватории испытательного полигона, при этом не требуются подъем АНПА 5 на поверхность и достаточно продолжительная процедура обработки данных счисления пути бортовых навигационных средств АНПА 5, что существенно сокращает время постобработки траекторных данных.
Полученную таким образом траекторию движения АНПА сравнивают с исходной запрограммированной и по их расхождению оценивают точность навигации АНПА при движении в акватории испытательного полигона.
Следует отметить, что в предлагаемом способе, в отличии от прототипа, для коррекции счисления пути АНПА используют горизонтальное расстояние по курсу между БНС и АНПА, полученное при гидроакустическом позиционировании АНПА и не требующее измерения скорости звука в акватории испытательного полигона.
В ходе полигонных испытаний по предлагаемому способу появляется возможность оперативного визуального контроля с берегового поста или иного места наблюдения подводных перемещений АНПА, транспонированных на поверхность акватории испытательного полигона в виде двухмерной траектории передвижения БНС, используемого в качестве поверхностного индикатора подводного перемещения АНПА, что облегчает и ускоряет процесс проверки возможных траекторий его передвижения.
При технической реализации предлагаемого способа для оснащения АНПА и БНС могут быть использованы промышленно выпускаемые устройства, системы и комплексы. Возможно изготовление необходимого специализированного оборудования под конкретные типы АНПА и БНС.
Так, например, необходимое для реализации предлагаемого способа оснащение АНПА можно осуществить с использованием:
- маяка-пингера, реализованного на базе усилителя мощности TDA7250 [6], гидроакустического преобразователя фирмы Брюль и Къер типа 8104 [7] и микроконтроллера ADUC841BSZ62-5 [8];
- гидроакустического модема RedLINE [9] с дальностью связи до 8 км;
- датчика глубины на основе тензопреобразователя КНС типа [10];
- малогабаритной бесплатформенной инерциальной навигационной системы БИНС-500НС [11], построенной на базе трех волоконно-оптических гироскопов и трех акселерометров.
При этом для оснащения БНС мини класса можно использовать:
- гидроакустический модем RedLINE [9] с дальностью связи до 8 км;
- малогабаритную бесплатформенную инерциальную навигационную систему БИНС-500НС [11], построенную на базе трех волоконно-оптических гироскопов и трех акселерометров с входящим в комплект приемником СНС;
- флэш-плеер Transcend МР330 [12] с памятью 8 ГБ в качестве съемного устройства хранения данных;
- движительно-рулевой комплекс с системой управления и бортовым компьютером безэкипажного катера «Тайфун-680» [13];
- гидроакустический фазовый пеленгатор с четырехэлементной антенной диаметрально-ортогональной геометрии, состав и техническая реализация оборудования которого представлены в патентах [3, 5].
Таким образом, предлагаемый способ позволяет расширить функциональные возможности одномаякового способа-прототипа, обеспечивая визуальный контроль подводных перемещений АНПА при проверке траекторных возможностей подводного передвижения, и повысить его эффективность, сокращая время постобработки траекторных данных при проверке точности навигации, позволяя причислить его к категории среднезатратных способов натурных испытаний автономных подводных аппаратов.
Список использованных источников
1. Ваулин Ю.В., Лаптев К.З. Оценка точности плавания автономного необитаемого подводного аппарата в заданном районе // Известия ЮФУ. Технические науки, 2015. С. 74-86.
2. Машошин А.И. Исследование точности одномаяковой навигации автономных необитаемых подводных аппаратов // Подводные исследования и робототехника. 2017. №2. С. 20-27.
3. Патент РФ 2709100, МПК G01S 1/72. Способ определения местоположения подводного объекта / В.Г. Арсентьев, Г.И. Криволапов, А.Е. Малашенко, Д.Д. Минаев. - Заявка 2018122532, заявлено 19.06.2018, опубликовано 16.12.2019. Бюл. №35.
4. Арсентьев В.Г., Криволапов Г.И. О влиянии геометрических параметров антенны на характеристики гидроакустического фазового пеленгатора // Вестник СибГУТИ. Новосибирск. 2019. №1. С. 92-101.
5. Патент РФ 2727331, МПК G01S 15/00. Способ гидроакустического поиска автономного донного подводного объекта / В.Г. Арсентьев, Г.И. Криволапов. - Заявка 2019145191, заявлено 25.12.2019, опубликовано 21.07.2020. Бюл. №21.
6. Усилитель TDA7250 [Электронный ресурс] // URL: http://www.radiomaster.net/pdf/audio/us_mos.pdf (дата обращения: 20.12.2021).
7. Гидрофоны: типы 8101-8106 [Электронный ресурс] // URL: http://asm-tm.ru/wp-content/uploads/2014/08/8101-8106-Gidrofony-NEW-PD.pdf (дата обращения: 20.12.2021).
8. Микроконтроллер ADUC841BSZ62-5 [Электронный ресурс] // URL: https://www.chipdip.ru/product/aduc841bsz62-5 (дата обращения: 20.12.2021).
9. Гидроакустический модем RedLINE [Электронный ресурс] // URL: https://github.com/ucnl/ucnl.github.io/blob/master/documentation/RU/RedLINE/RedLine_Specification_ru.md (дата обращения: 20.12.2021).
10. Сенсоры физических величин [Электронный ресурс] // URL: http://www.zaovip.ru/products/kns1/(дата обращения: 20.12.2021).
11. Бесплатформенная инерциальная навигационная система БИНС-500НС [Электронный ресурс] // URL: https://naukasoft.ru/produkciya/aviacionnoe-oborudovanie/besplatformennaja-inercialnaja-navigacionnaja-sistema-bins-500ns.html (дата обращения: 20.12.2021).
12. Портативные плееры [Электронный ресурс] // URL: https://headphonesbest.ru/portativnyj-pleer/14941top-15-luchshix-portativnyx-mp3-pleerov.html (дата обращения: 20.12.2021).
13. Безэкипажный катер «Тайфун-680» [Электронный ресурс] // URL: http://zonwar.ru/news4/news_732_Taifun-680.html (дата обращения: 20.12.2021).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| Способ позиционирования самоходного необитаемого подводного аппарата, выполняющего мониторинг подводной акватории | 2022 |
|
RU2794555C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
Использование: изобретение относится к области натурных испытаний автономных необитаемых подводных аппаратов и может быть использовано для проверки точности их навигации и траекторных возможностей подводного передвижения, в значительной мере определяющих сферу применения подводных аппаратов и категорию решаемых с их помощью задач. Сущность: в заявленном способе проверки точности навигации автономного необитаемого подводного аппарата за счет наличия возможности оперативного визуального контроля двухмерной траектории его подводного перемещения, транспонированной на поверхность акватории испытательного полигона, в процессе проверки возможных траекторий его передвижения и сокращения времени постобработки траекторных данных при проверке точности навигации в результате осуществления скоординированного движения по двухмерной траектории запрограммированного маршрута акватории испытательного полигона автономного необитаемого подводного аппарата и безэкипажного надводного судна, выполняющего функции навигационного маяка и поверхностного индикатора двухмерной траектории подводного перемещения автономного необитаемого подводного аппарата, с записью на безэкипажном надводном судне его текущих геодезических координат и глубин погружения автономного необитаемого подводного аппарата на маршруте передвижения, используемых при постобработке траекторных данных для построения траектории маршрута автономного необитаемого подводного аппарата в акватории испытательного полигона. Технический результат: расширение функциональных возможностей и повышение эффективности способа одномаяковой навигации при испытаниях автономного необитаемого подводного аппарата на морском полигоне. 5 ил.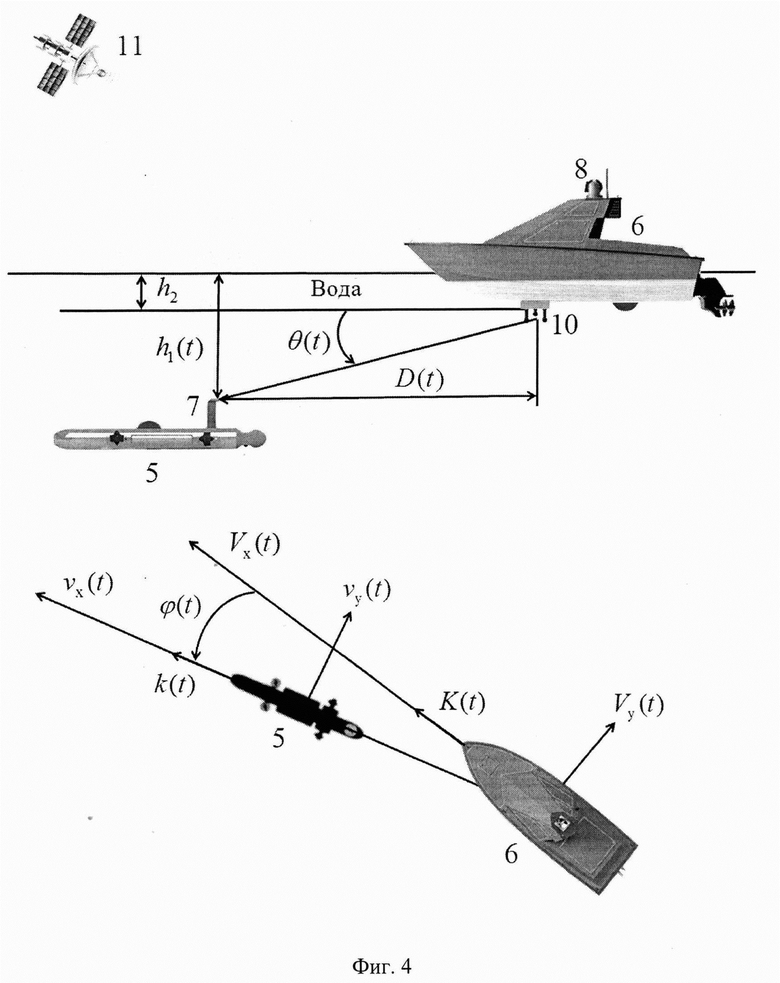
Способ проверки на морском полигоне точности навигации автономного необитаемого подводного аппарата, оснащенного штатным оборудованием соответствующего функционального состава, заключающийся в организации подводного передвижения автономного необитаемого подводного аппарата по запрограммированному маршруту между двумя реперными точками акватории испытательного полигона с известными геодезическими координатами в присутствии безэкипажного надводного судна, при этом навигацию автономного необитаемого подводного аппарата обеспечивают его гидроакустическим модемом для обмена сообщениями с безэкипажным надводным судном, бортовыми средствами навигации, включающими в себя инерциальную навигационную систему и датчик глубины, для периодической оценки курса, ортогональных составляющих путевой скорости, глубины погружения, используемых для счисления пути в акватории испытательного полигона, безэкипажным надводным судном, выполняющим функцию навигационного маяка, с оснащением его движительно-рулевым комплексом для передвижения в акватории испытательного полигона, приемником сигналов спутниковой навигационной системы для геодезического позиционирования, гидроакустическим модемом для передачи геодезических координат на автономный необитаемый подводный аппарат, которые совместно с курсом, ортогональными составляющими путевой скорости, глубиной погружения автономного необитаемого подводного аппарата используют для коррекции счисления его пути, в выполнении после прибытия автономного необитаемого подводного аппарата в конечную реперную точку маршрута постобработки траекторных данных для оценки точности навигации, состоящей в построении траектории маршрута автономного необитаемого подводного аппарата на испытательном полигоне по данным используемых навигационных средств и определении ее отклонений от траектории запрограммированного маршрута, характеризующих точность навигации автономного необитаемого подводного аппарата, отличающийся тем, что осуществляют скоординированное движение безэкипажного надводного судна и автономного необитаемого подводного аппарата по двухмерной траектории запрограммированного маршрута в акватории испытательного полигона, реализуемое дооснащением автономного необитаемого подводного аппарата гидроакустическим маяком-пингером - источником периодического навигационного сигнала для гидроакустического позиционирования относительно безэкипажного надводного судна, дооснащением безэкипажного надводного судна съемным устройством хранения данных для записи и хранения текущих маршрутных данных, инерциальной навигационной системой для определения курса с ортогональными составляющими путевой скорости движения в акватории испытательного полигона, гидроакустическим фазовым пеленгатором с четырехэлементной антенной диаметрально-ортогональной геометрии, согласованной с курсом безэкипажного надводного судна и имеющей расстояние между парами приемных гидрофонов в горизонтальной плоскости, в два раза превышающее расстояние между парами приемных гидрофонов в вертикальной плоскости, являющееся базовым установочным размером антенны, для гидроакустического позиционирования автономного необитаемого подводного аппарата с периодичностью излучения его маяка-пингера путем определения в системе координат пеленгационной антенны безэкипажного надводного судна пеленга, угла места автономного необитаемого подводного аппарата, горизонтального расстояния по курсу между безэкипажным надводным судном и автономным необитаемым подводным аппаратом без необходимости измерения скорости звука в акватории испытательного полигона, причем частоту гармонического навигационного сигнала маяка-пингера автономного необитаемого подводного аппарата выбирают из условия фазовой однозначности пеленгования, передачей с периодичностью гидроакустического позиционирования автономного необитаемого подводного аппарата посредством гидроакустического модема с автономного необитаемого подводного аппарата на безэкипажное надводное судно сообщений о курсе, ортогональных составляющих путевой скорости движения, глубине погружения автономного необитаемого подводного аппарата, совмещением курсов и выравниванием путевых скоростей безэкипажного надводного судна и автономного необитаемого подводного аппарата посредством системы управления движительно-рулевого комплекса безэкипажного надводного судна на основе сопоставления курсовых, скоростных и траекторных параметров подводного передвижения автономного необитаемого подводного аппарата и надводного передвижения безэкипажного надводного судна в акватории испытательного полигона, передают посредством гидроакустического модема с безэкипажного надводного судна на автономный необитаемый подводный аппарат с периодичностью геодезического позиционирования безэкипажного надводного судна, кратно превышающей периодичность гидроакустического позиционирования автономного необитаемого подводного аппарата, помимо сообщений о геодезических координатах безэкипажного надводного судна сообщения о горизонтальном расстоянии по курсу между безэкипажным надводным судном и автономным необитаемым подводным аппаратом, необходимом наряду с геодезическими координатами безэкипажного надводного судна, курсом, ортогональными составляющими путевой скорости, глубиной погружения автономного необитаемого подводного аппарата для коррекции счисления его пути в акватории испытательного полигона, записывают в процессе скоординированного движения автономного необитаемого подводного аппарата и безэкипажного надводного судна по запрограммированному маршруту с периодичностью геодезического позиционирования безэкипажного надводного судна в съемное устройство хранения данных безэкипажного надводного судна текущие маршрутные данные: геодезические координаты безэкипажного надводного судна и глубины погружения автономного необитаемого подводного аппарата, на основе которых при постобработке траекторных данных выстраивают траекторию маршрута автономного необитаемого подводного аппарата в акватории испытательного полигона.
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| Способ приведения автономного необитаемого подводного аппарата | 2016 |
|
RU2616446C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| EP 1927201 B1, 29.11.2017. | |||

