Изобретение относится к судовождению и может быть использовано в средствах автоматического и дистанционного управления движением судов.
Одним из условий реализации управления судна в безэкипажном режиме является разработка автоматических систем, обеспечивающих безопасность судовождения в различных критических ситуациях, в том числе управление с требуемой точностью во всем диапазоне скоростей судна, который условно можно разделить на поддиапазоны скоростей малых ходов (менее четырех узлов) и ходов более четырех узлов.
Из уровня техники известна система автоматического управления движением судна по патенту RU 2381140 (МПК В63Н 25/04, G05D 1/00, опубл. 10.02.2010), которая содержит блок коррекции параметров системы автоматического управления движением, блок формирования сигналов управления, задатчик курса и координат позиционирования, сумматор и приемоиндикатор спутниковой навигационной системы.
Из патента на полезную модель RU 171461 (МПК В63Н 25/04, опубл. 01.06.2017) известна система автоматического управления движением судна по направлению и скорости, которая состоит из двух независимых каналов: канала управления движением судна по заданному направлению и канала управления скоростью движения судна. Канал управления движением судна по заданному направлению содержит задатчик путевого угла, датчик путевого угла, датчик руля, сумматор, датчик угловой скорости и рулевой привод, блок разности, блок модуля разности, блок сравнения, блок памяти, таймер, блок оценки внешнего возмущающего момента, блок допустимой величины внешнего возмущающего момента. Канал управления скоростью движения судна содержит привод оборотов гребного вала, регулятор скорости хода, датчик оборотов гребного вала, задатчик скорости хода, датчик скорости хода, блок разности скоростей, блок памяти разности скоростей, блок модуля разности скоростей, блок логики и блок интегрирования.
Известна система автоматического управления движением судна по патенту RU 2463205 (МПК В63Н 25/04, опубл. 10.10.2012), который содержит блок измерителей параметров движения судна, блок датчиков внешних воздействий, блок объектов управления, вычислительный блок, блок управления. Навигационный модуль в блоке измерителей параметров движения судна включает аппаратуру дифференциальных вариантов спутниковых навигационных систем GPS и «ГЛОНАСС», аппаратуру инерциальной навигационной системы, аппаратуру радионавигационных систем, аппаратуру гидроакустических навигационных систем и аппаратуру радиогеодезических систем. Блок датчиков внешних воздействий содержит датчики параметров ветра, волнения, течения и приливного воздействия. Блок объектов управления включает главные движители с гребными винтами регулируемой скорости или регулируемого шага, рулевое устройство, двигатели подруливающих устройств типа «винт в трубе», поворотные двигатели регулируемой скорости или регулируемого шага поворотных движительно-рулевых колонок с соответствующими датчиками управляющих воздействий. Блок управления выполнен в виде модуля судоводителя и содержит блок управления и контроля.
Техническое решение, известное из патента RU 2463205, выбрано в качестве ближайшего аналога данного изобретения.
В качестве недостатков ближайшего аналога, а также недостатков других приведенных аналогов можно отметить отсутствие возможностей надежного управления судном во всем диапазоне его скоростей в режимах автоматического и дистанционного управления. Кроме того, в указанных аналогах не предусмотрено использование в качестве входных данных результатов моделирования движения судна в режиме реального времени.
Задача, на решение которой направлена данное изобретение, заключается в создании системы координированного управления движением судна, обеспечивающей управление судном как в автоматическом, так и дистанционном режимах, а также повышение эффективности этого процесса, путем устранения указанных недостатков.
Технический результат, достигаемый при осуществлении заявляемого изобретения, заключается в расширении функциональных возможностей системы координированного управления движением судна за счет реализации автоматического управления судном во всем диапазоне его скоростей, а также использования данных моделирования движения в режиме реального времени.
Указанный технический результат достигается тем, что в систему координированного управления движением судна, содержащую блок измерителей параметров движения судна и блок объектов управления, дополнительно включены блок адаптации управления и стабилизации на малых ходах, блок управления и стабилизации на малых ходах, блок адаптации управления и стабилизации на скорости хода более четырех узлов, блок управления и стабилизации на скорости хода более четырех узлов, блок обработки навигационной информации, блок моделирования движения судна на малых ходах, блок моделирования движения судна на скорости хода более четырех узлов, блок контроля и управления, обзорно-поисковая система и взаимосвязанные автономная навигационная система и береговой пост, причем выход блока измерителей параметров движения судна подключен к входу блока обработки навигационной информации, выходы которого соединены с входами блока адаптации управления и стабилизации на малых ходах, блока управления и стабилизации на малых ходах, блока адаптации управления и стабилизации на скорости хода более четырех узлов и блока управления и стабилизации на скорости хода более четырех узлов, а входами-выходами соединен с входами-выходами блока моделирования движения судна на малых ходах и блока моделирования движения судна на скорости хода более четырех узлов, выход которого подключен к входу блока адаптации управления и стабилизации на скорости хода более четырех узлов, выходы которого соединены с входами блока управления и стабилизации на скорости хода более четырех узлов и блока контроля и управления, выход которого подключен к входу блока объектов управления, выход которого соединен с входами блока адаптации управления и стабилизации на малых ходах, блока адаптации управления и стабилизации на скорости хода более четырех узлов, блока моделирования движения судна на скорости хода более четырех узлов и блока моделирования движения судна на малых ходах, выход которого соединен с вход блока адаптации управления и стабилизации на малых ходах, выходы которого подключены к входам блока контроля и управления и блока управления и стабилизации на малых ходах, выходы которого соединены с входами блока моделирования движения судна на малых ходах и блока контроля и управления, выход автономной навигационной системы подключен к входам блока управления и стабилизации на малых ходах и блока управления и стабилизации на скорости хода более четырех узлов, выходы которого соединены с входами блока моделирования движения судна на скорости хода более четырех узлов и блока контроля и управления, выход обзорно-поисковой системы подключен к входу автономной навигационной системы.
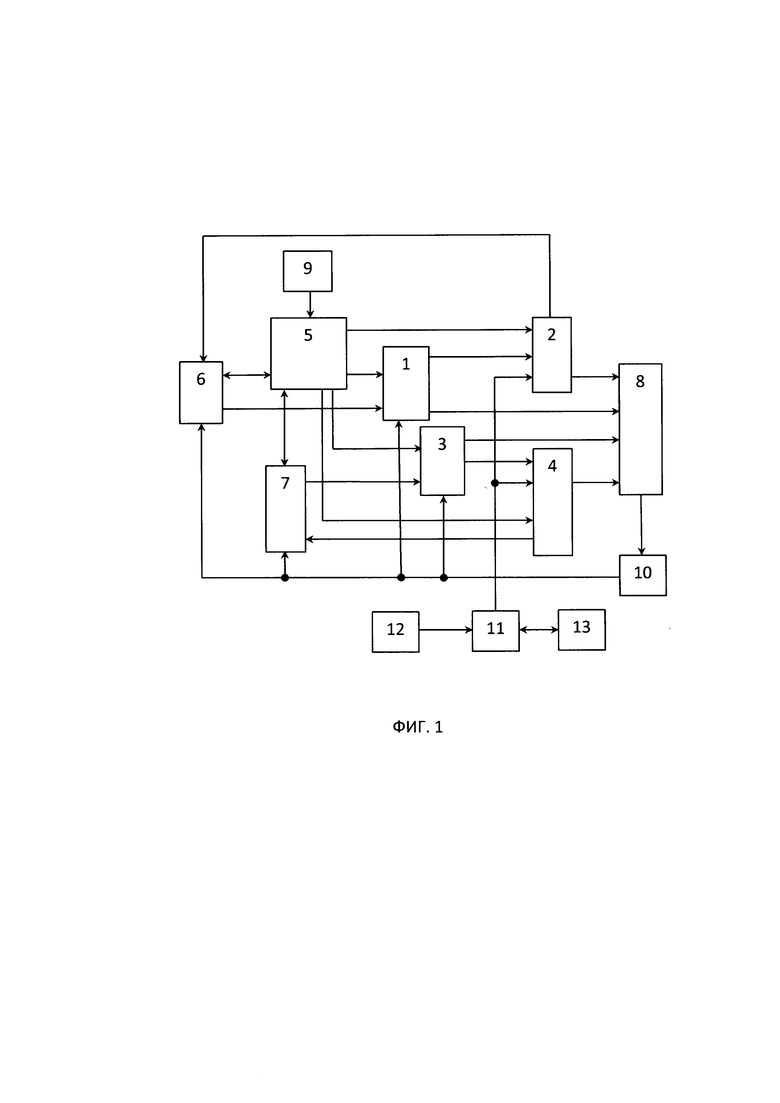
Сущность заявляемой системы координированного управления движением судна поясняется примером ее реализации и фиг. 1, где изображена структурная электрическая схема системы.
Система координированного управления движением судна включает (фиг. 1) блок 1 адаптации управления и стабилизации на малых ходах, блок 2 управления и стабилизации на малых ходах, блок 3 адаптации управления и стабилизации на скорости хода более четырех узлов, блок 4 управления и стабилизации на скорости хода более четырех узлов, блок 5 обработки навигационной информации, блок 6 моделирования движения судна на малых ходах, блок 7 моделирования движения судна на скорости хода более четырех узлов, блок 8 контроля и управления, блок 9 измерителей параметров движения, блок 10 объектов управления, автономную навигационную систему 11, обзорно-поисковую систему 12 и береговой пост 13.
Блок 1 адаптации управления и стабилизации на малых ходах обеспечивает оценку интенсивности морского волнения, выдачу команд на корректировку параметров модели в блок 6 моделирования движения судна на малых ходах, выдачу команд на корректировку параметров регуляторов в блок 2 управления и стабилизации судна на малых ходах. Блок 1 осуществляет оценку интенсивности морского волнения и скорости течения на основе данных, получаемых с блока 6 моделирования движения судна, который включает модель внешних возмущений [1, С. 152-157], и расчет аэродинамических сил, действующих на корпус судна [1, С. 157; 2, С. 25-26], с использованием данных скорости и направления ветра, а также данные курса и скорости хода судна, получаемых с блока 9 измерителей параметров движения судна. По измеренным и восстановленным характеристикам внешних возмущений оцениваются силы и моменты ветра, волнения и течения [3, С. 54-58]. В зависимости от значения силы ветра, волнения и течения, действующих на судно, блок 1 корректирует коэффициенты регуляторов в блоке 2 управления и стабилизации на малых ходах. Корректировка коэффициентов осуществляется на основе нейросетевых технологий [4, С. 166-170]. Уточнение параметров математической модели, передаваемых из блока 5, осуществляется по результатам сравнения прогнозируемых и измеряемых данных на основе градиентных методов идентификации [5]. Скорректированные параметры математической модели передаются обратно в блок 6.
Блок 2 управления и стабилизации на малых ходах обеспечивает стабилизацию скорости хода, курса или угловой скорости поворота в зависимости от выбранного режима работы и выдает соответствующие команды на системы управления винто-рулевыми колонками, главными движителями с гребными винтами регулируемой скорости и/или регулируемого шага, рулевые устройства, подруливающие устройства, выдвижные винто-рулевые колонки. Блок реализован как нелинейный ПИД регулятор [1, С. 372].
Блок 3 адаптации управления и стабилизации на скорости хода более четырех узлов обеспечивает оценку интенсивности морского волнения, выдачу команд на корректировку параметров модели в блок 7 моделирования движения судна на скорости хода более четырех узлов, выдачу команд на корректировку параметров регуляторов в блок 4 управления и стабилизации судна на скорости хода более четырех узлов. Функционирование блока 3 аналогично блоку 1.
Блок 4 управления и стабилизации на малых ходах обеспечивает стабилизацию скорости хода, курса или угловой скорости поворота в зависимости от выбранного режима работы и выдает соответствующие команды на системы управления винто-рулевыми колонками, главными движителями с гребными винтами регулируемой скорости и/или регулируемого шага, рулевые устройства. Блок реализован как нелинейный ПИД регулятор [4, С. 372].
Блок 5 обработки навигационной информации предназначен для фильтрации, просеивания сбоев и восстановления навигационных данных, получаемых от навигационных датчиков. Данный блок состоит из диагностических фильтров и фильтров Калмана. Реализация диагностического фильтра, который используется в блоке 5, приведена в [2, С. 88]. В качестве фильтра Калмана используется реализация, описанная в [2, С. 92].
Блок 6 моделирования движения судна на малых ходах предназначен для прогнозирования движения судна при заданных командах управления на блок 10 объектов управления и внешних возмущениях, действующих на судно. Функционирование блока 6 осуществляется на основе математической модели движения судна, приведенной в работе [1, С. 152-157]. Порядок идентификации параметров модели движения описаны в работах [5, 6].
Блок 7 моделирования движения судна на скорости хода более четырех узлов предназначен для прогнозирования движения судна при заданных командах управления на блок 10 объектов управления и внешних возмущениях, действующих на судно. Описание и работа блока 7 аналогичны блоку 6.
Блок 8 контроля и управления предназначен для подачи команд управления, поступающих от блоков 2 и 4 на блок 10, и представляет собой блок, который в зависимости от скорости хода и выбранного режима работы обрабатывает команды от блока 2 или от блока 4. В процессе обработки блок 8 выполняет функцию распределения упоров [7] и выдает совокупность исполнительных команд на блок 10.
Блок 9 измерителей параметров движения предназначен для измерения текущих координат судна, его курса, крена, дифферента и скорости хода, а также ветра, действующего на судна. Минимальный состав блока 9 измерителей параметров движения: спутниковая навигационная система GPS/ГЛОНАСС, гирокомпас или магнитный компас, датчики крена и дифферента, датчик ветра.
Блок 10 объектов управления предназначен для создания упоров и включает в свой состав системы дистанционного автоматизированного управления совместно с исполнительными устройствами, такими как винто-рулевые колонки, главные движители с гребными винтами регулируемой скорости и/или регулируемого шага, рулевое устройство, подруливающие устройства, выдвижные винто-рулевые колонки. Блок 10 также содержит датчики обратных связей от исполнительных устройств: измерители частоты вращения и шага винтов, углов разворота винторулевых колонок, датчики положения пера руля и т.д.
Автономная навигационная система 11 в зависимости от поставленной задачи (движение по траектории, удержание местоположение и др.) задает команды в виде заданной скорости хода, заданного местоположения, заданного курса или заданной угловой скорости поворота и представляет собой программно-аппаратный комплекс на основе электронно-картографической навигационной системы. Навигационная система может работать в автоматическом или дистанционном режиме. В автоматическом режиме работы команды вырабатываются навигационной системой в зависимости от задачи, поставленной с берегового поста 13 и от окружающей обстановки вокруг судна, получаемой от обзорно-поисковой системы 12. В дистанционном режиме работы навигационная система получает команды на движение по каналам связи с берегового поста дистанционного управления.
Обзорно-поисковая система 12 представляет собой программно-аппаратный комплекс, в состав которого входит вычислительный сервер, автоматическая идентификационная станция (АИС), радиолокационная станция (РЛС) и видеокамеры, установленные по корпусу судна. Получая данные с РЛС, АИС и видеокамер, система 12 идентифицирует объекты, окружающее судна, и передает в автономную навигационную систему 11 пеленг и дистанцию до целей.
Береговой пост 13 дистанционного управления представляет собой программно-аппаратный комплекс, состоящий из пультовых секций, в составе которых установлены мониторы, вычислители, панели контроля и управления. На одном из пультов установлена электронная картографическая навигационная информационная система (ЭКНИС), на мониторе которой отображается движение судна и окружающая его обстановка. Дистанционное управление судном с берегового поста может осуществляться путем задания траектории на ЭКНИС либо с помощью джойстика, расположенного на панели контроля и управления из состава берегового поста 13. Обмен данными между автономной навигационной системой 11 и береговым постом 13 осуществляется посредством оборудования связи, обеспечивающего канал УКВ или спутниковой связи.
Система координированного управления движением судна работает следующим образом. От автономной навигационной системы 11 на блоки 1, 2, 3 и 4 поступает команда на управление в виде заданного курса, скорости хода или траектории. В случае беспилотного управления команда в автономную навигационную систему поступает с берегового поста 13.
Также в блоки 1, 2, 3 и 4 передаются оценки параметров движения судна, полученные от блока 5 обработки навигационной информации, который формирует оценки по данным измерений, получаемых от блока 9 измерителей параметров движения.
В блоках 2 и 4 производится сравнение текущих и заданных параметров движения, в результате сравнения формируются обобщенные управляющие воздействия, которые необходимо создать для достижения заданных параметров: на малых ходах воздействия формирует блок 2, на скорости хода более четырех узлов - блок 4. Управляющие воздействия от блоков 2 и 4 передаются на блок 8 контроля и управления.
Блок 8 осуществляет контроль работы всех блоков, распределяет управляющие воздействия между объектами управления и передает команды управления на блок 10 объектов управления.
Информация о состоянии объектов управления от блока 10 передается в блоки 6 и 7, куда также поступает информация об оценках параметров движения от блока 5. В блоках 6 и 7 осуществляется прогнозирование изменения параметров движения и сравнение прогнозируемых параметров с оценками измерений: в блоке 6 обрабатываются данные при малой скорости хода, в блоке 7 - данные при скорости хода более четырех узлов. В случае расхождения прогнозируемых параметров и оценок осуществляется корректировка параметров математической модели движения, и скорректированные параметры поступают в блоки 1 и 3, осуществляющие контроль изменения параметров математической модели движения, при необходимости подстраивая коэффициенты регуляторов, которые передаются в блоки 2 и 4.
Обзорно-поисковая система 12 осуществляет оперативный мониторинг окружающей обстановки и в случае потенциальной аварийной ситуации формирует команды на изменение курса, скорости и траектории судна, и передает команды в автономную навигационную систему 11.
Отличительной особенностью системы является то, что она может осуществлять управление судном по курсу, скорости хода и траектории во всех диапазонах скорости хода судна. Для обеспечения управления судном на малых скоростях хода, судно должно иметь в качестве объектов управления, помимо гребных винтов с рулями или винто-рулевыми колонками, подруливающие устройства или выдвижные поворотные рулевые колонки. Устойчивость системы координированного управления движением судна к отказам средств измерения параметров достигается за счет эффективной работы блока 5 обработки навигационной информации, выявляющего отказы и формирующего сглаженные оценки параметров движения за счет комплексной обработки измеряемых данных.
Заявленное изобретение реализовано в опытном образце системы координированного управления движением судна, обладающим расширенными функциональными возможностями, которые в совокупности позволили повысить безопасность движения в условиях дистанционного управления, снизить нагрузку на средства управления движением судна, тем самым обеспечить ее конкурентоспособность.
Источники информации
1. Fossen, Т. I. Handbook of marine craft hydrodynamics and motion control. John Wiley & Sons, 2011.
2. Амбросовский B.M., Коренев А.С, Лукомский Ю.А., Шпекторов А.Г. Координированное управление морскими подвижными объектами/ под ред. Ю.А. Лукомского. - СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2016. - 128 с.
3. Антонов В. А., Письменный А. Н. Теоретические вопросы управления судном. Учебное пособие. - М: МГУ им. Адм. Г.И. Невельского, 2007. - 78 с.
4. Li D. and Gu М. X. DYNAMIC POSITIONING OF SHIPS USING A PLANNED NEURAL NETWORK CONTROLLER. Journal of Ship Research. Vol. 40, No 2., June 1996, PP. 164-171.
5. Дыда А.А. Нейросетевая идентификация динамики морских подвижных объектов // Научные проблемы транспорта Сибири и Дальнего востока. - 2011. - С. 111-115.
6. Амбросовский В.М., Казунин Д.В. Идентификация параметров математической модели движения морского подвижного объекта // Морской вестник. - 2017. - С. 95-98.
7. Амбросовский В.М., Хабаров С.П., Коренев А.С. Распределение упоров в задаче позиционирования подвижных объектов // Известия СПбГЭТУ «ЛЭТИ». - 2013. - №7. - С. 63-69.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления техническими средствами и движением МАНС | 2023 |
|
RU2825914C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БУКСИРА ПОРТОВОГО ФЛОТА В РЕЖИМЕ ДИСТАНЦИОННОГО ПИЛОТИРОВАНИЯ | 2022 |
|
RU2794384C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
Система координированного управления движением судна в режимах автоматического и дистанционного управления содержит блок адаптации управления и стабилизации на малых ходах, блок управления и стабилизации на малых ходах, блок адаптации управления и стабилизации на скорости хода более четырех узлов, блок управления и стабилизации на скорости хода более четырех узлов, блок обработки навигационной информации, блок моделирования движения судна на малых ходах, блок моделирования движения судна на скорости хода более четырех узлов, блок контроля и управления, блок измерителей параметров движения, блок объектов управления, автономную навигационную систему, обзорно-поисковую систему и береговой пост, соединенные определенным образом. Обеспечивается расширение функциональных возможностей координированного управления движением судна во всем диапазоне его скоростей. 1 ил.
Система координированного управления движением судна в режимах автоматического и дистанционного управления, содержащая блок измерителей параметров движения судна и блок объектов управления, отличающаяся тем, что в состав системы включены блок адаптации управления и стабилизации на малых ходах, блок управления и стабилизации на малых ходах, блок адаптации управления и стабилизации на скорости хода более четырех узлов, блок управления и стабилизации на скорости хода более четырех узлов, блок обработки навигационной информации, блок моделирования движения судна на малых ходах, блок моделирования движения судна на скорости хода более четырех узлов, блок контроля и управления, обзорно-поисковая система и взаимосвязанные автономная навигационная система и береговой пост, причем выход блока измерителей параметров движения судна подключен к входу блока обработки навигационной информации, выходы которого соединены с входами блока адаптации управления и стабилизации на малых ходах, блока управления и стабилизации на малых ходах, блока адаптации управления и стабилизации на скорости хода более четырех узлов и блока управления и стабилизации на скорости хода более четырех узлов, а входами-выходами соединен с входами-выходами блока моделирования движения судна на малых ходах и блока моделирования движения судна на скорости хода более четырех узлов, выход которого подключен к входу блока адаптации управления и стабилизации на скорости хода более четырех узлов, выходы которого соединены с входами блока управления и стабилизации на скорости хода более четырех узлов и блока контроля и управления, выход которого подключен к входу блока объектов управления, выход которого соединен с входами блока адаптации управления и стабилизации на малых ходах, блока адаптации управления и стабилизации на скорости хода более четырех узлов, блока моделирования движения судна на скорости хода более четырех узлов и блока моделирования движения судна на малых ходах, выход которого соединен с вход блока адаптации управления и стабилизации на малых ходах, выходы которого подключены к входам блока контроля и управления и блока управления и стабилизации на малых ходах, выходы которого соединены с входами блока моделирования движения судна на малых ходах и блока контроля и управления, выход автономной навигационной системы подключен к входам блока управления и стабилизации на малых ходах и блока управления и стабилизации на скорости хода более четырех узлов, выходы которого соединены с входами блока моделирования движения судна на скорости хода более четырех узлов и блока контроля и управления, выход обзорно-поисковой системы подключен к входу автономной навигационной системы.
| 0 |
|
SU165915A1 | |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| CN 100534859 C, 02.09.2009 | |||
| JP 11011394 A, 19.01.1999 | |||
| WO 2004059411 A1, 15.07.2004 | |||
| JP 2020060886 A, 16.04.2020. | |||

