Область техники
Настоящее изобретение относится к приводу, содержащему электродвигатель и контроллер двигателя. Более конкретно, настоящее изобретение относится к приводу, содержащему электродвигатель и контроллер двигателя, при этом упомянутый привод используется для работы совместно, т.е. в объединенной конфигурации с другим приводом, который механически соединен с упомянутым приводом, для приведения в движение общей нагрузки.
Предшествующий уровень техники
Из общей практики принято два или более приводов механически соединять для приведения в движение общей нагрузки, т.е. использовать два или более приводов в объединенной конфигурации или просто «объединенными». Например, приводы механически соединяют прямо путем прикрепления к общему приводному валу или непрямо посредством соединительных штоков, рычагов, тяг, других рычажных механизмов, или деталей приводимой в движение нагрузки, например демпфера или клапана. Обычно и в зависимости от типа и способа механического соединения приводов друг с другом и/или с общей нагрузкой, материалов, используемых для упомянутого механического соединения, и расстояний между отдельными приводами, и других факторов, нагрузка распределяется неравномерно между объединенными приводами, и усилие, обеспечиваемое их электродвигателями, используется и объединяется неоптимально, и что хуже всего, в результате при этом повреждаются зубчатые и передаточные механизмы приводов.
Краткое изложение сущности изобретения
Задачей настоящего изобретения является создание электропривода, который выполнен с возможностью совместной работы с одним или несколькими другими приводами, которые соединены в объединенной конфигурации, для приведения в движение общей нагрузки, который не имеет по меньшей мере некоторых недостатков устройств известного уровня техники.
В соответствии с настоящим изобретением данные задачи решаются посредством признаков независимых пунктов формулы изобретения. Кроме того, из зависимых пунктов формулы изобретения и описания следуют дополнительные предпочтительные варианты осуществления.
В соответствии с настоящим изобретением вышеупомянутые задачи, в частности, решаются тем, что привод, содержащий электродвигатель и контроллер двигателя, выполнен с возможностью использования в качестве ведущего или ведомого по отношению к другому приводу, который механически соединен с упомянутым приводом для приведения в движение общей нагрузки. Контроллер двигателя, в случае, если привод установлен как ведущий, выполнен с возможностью приема на входной клемме внешнего сигнала управления положением, генерирования на основе упомянутого сигнала управления положением (и нагрузки) сигнала управления двигателем, например сигнала управления скоростью или сигнала управления моментом, управления двигателем посредством подачи упомянутого сигнала управления двигателем в двигатель и управления ведомым приводом посредством подачи упомянутого сигнала управления двигателем на выходную клемму. Контроллер двигателя, в случае, если привод установлен как ведомый, выполнен с возможностью приема на входной клемме сигнала управления двигателем, подаваемого ведущим приводом, и для управления двигателем посредством подачи упомянутого сигнала управления двигателем от ведущего привода в электродвигатель. Таким образом, два или более приводов, которые механически соединены для приведения в движение общей нагрузки, действуют в соответствии с сигналом управления одного общего контроллера, который реализован на приводе, который установлен как ведущий, и принимает сигналы обратной связи по усилию от ведомых приводов через упомянутое механическое соединение. Таким образом, сигнал управления скоростью, выдаваемый ведущим приводом в ведомый привод (приводы), характеризует не только скорость, с которой должны работать приводы, но также и механический момент, или наоборот. Таким образом, исключена контрпродуктивная работа, рабочая нагрузка распределяется более равномерно между объединенными приводами, обеспечивается более согласованное и эффективное распределение рабочей нагрузки и может быть сохранена энергия, без повреждения зубчатых и передаточных механизмов приводов, поскольку приводы приводят в движение их общую нагрузку в одном и том же направлении и не противодействуют друг другу.
В предпочтительном варианте осуществления контроллер двигателя дополнительно выполнен с возможностью измерения в момент пуска уровней напряжения на входной клемме и установления привода как ведомого в зависимости от упомянутых уровней напряжения, измеренных на упомянутой входной клемме. Автоматическое установление режима ведомого на основе уровней напряжения на входной клемме позволяет определить привод как ведомый просто посредством соответствующего проводного монтажа ведомого привода, при условии что заданные уровни напряжения подаются, например, посредством ведущего привода или другой внешней системы управления.
В другом предпочтительном варианте осуществления контроллер двигателя дополнительно выполнен с возможностью уменьшения импеданса входной клеммы, в случае если привод установлен как ведомый. Кроме того, контроллер двигателя выполнен с возможностью обнаружения на выходной клемме снижения напряжения, вызванного уменьшенным импедансом другого привода, соединенного с выходной клеммой, и для установления привода как ведущего при обнаружении снижения напряжения на выходной клемме. Автоматическое установление ведущего режима на основе прерывания, которое индицируется по резкому снижению напряжения, вызванному уменьшенным уровнем импеданса блока, соединенного с выходной клеммой, позволяет определять привод как ведущий просто посредством соответствующего проводного монтажа ведущего привода, при условии, что уровень импеданса уменьшен, например, соответственно, посредством одного или нескольких ведомых приводов или другого внешнего блока.
В предпочтительном варианте осуществления контроллер двигателя в момент пуска дополнительно выполнен с возможностью установления заданного первого уровня напряжения на выходной клемме и установления заданного второго уровня напряжения на выходной клемме, после того как он установлен как ведущий, причем заданный второй уровень напряжения отличается от первого уровня напряжения. Выдача другого, например, пониженного или повышенного, уровня напряжения посредством ведущего привода на выходной клемме позволяет приводу, который содержит свою входную клемму как ведомую, соединенную с выходной клеммой ведущего привода, более надежно установить, что он действительно установлен как ведомый привод, соединенный с ведущим приводом.
В варианте осуществления контроллер электродвигателя, в случае если привод установлен как ведомый, дополнительно выполнен с возможностью выдачи на выходной клемме сигнала положения, показывающего текущее положение привода. Упомянутый сигнал положения позволяет показать внешней системе управления реальное и текущее положения привода (приводов).
В варианте осуществления привод дополнительно содержит один или несколько хранимых параметров привода, например параметр скорости и/или параметр момента, и контроллер электродвигателя выполнен с возможностью генерирования сигнала управления электродвигателем на основе упомянутых параметров привода и упомянутого сигнала управления положением (и нагрузки). Таким образом, один внешний сигнал управления положением может подаваться, соответственно, в разные типы приводов и электродвигателей, которые содержат разные параметры привода, хранимые для преобразования внешнего сигнала управления положением внутри в соответствующий сигнал управления двигателем.
В варианте осуществления привод дополнительно выполнен с возможностью работы как автономный привод, и контроллер двигателя, в случае если привод установлен как автономный привод, дополнительно выполнен с возможностью приема на входной клемме внешнего сигнала управления положением, генерирования на основе упомянутого сигнала управления положением (и нагрузки) сигнала управления двигателем, управления электродвигателем посредством подачи упомянутого сигнала управления двигателем в двигатель и выдачи на выходной клемме сигнала положения, показывающего текущее положение привода. Таким образом, один и тот же тип привода может быть использован в режиме ведущего, в режиме ведомого или в автономном режиме, просто посредством соответствующей конфигурации, например посредством соответствующего проводного монтажа.
В другом варианте осуществления привод дополнительно содержит клеммную коробку, причем упомянутая клеммная коробка размещает электрические клеммы привода и содержит участки разрыва для подведения электрических проводов через клеммную коробку к электрическим клеммам.
В другом варианте осуществления привод дополнительно содержит элементы ручного управления, которые размещены в клеммной коробке.
Предпочтительно, клеммная коробка содержит съемную крышку, причем в закрытом положении упомянутая съемная крышка выполнена с возможностью предохранения электрических клемм от разбрызгиваемой жидкости, а в открытом положении обеспечивает доступ к электрическим клеммам и/или к элементам ручного управления.
В варианте осуществления привод дополнительно содержит механическое устройство сопряжения с двумя отверстиями на противоположных сторонах для приема приводного вала. Упомянутое механическое устройство сопряжения содержит размещенное в одном из упомянутых отверстий крепежное средство для соединения приводного вала с двигателем и одно или несколько опорных колец, вставленных в противоположное одно из упомянутых отверстий и приспособленных для приема приводного вала и уменьшения поперечного перемещения приводного вала относительно приводной оси, проходящей через упомянутые два отверстия.
В другом варианте осуществления привод дополнительно содержит элемент предотвращения вращения, расположенный на поверхности привода, и упомянутые опорные кольца вставлены в одно из упомянутых отверстий, которое расположено на поверхности привода, содержащей упомянутый элемент предотвращения вращения, расположенный на ней. Упомянутые опорные вставные кольца предотвращают или по меньшей мере уменьшают поперечное перемещение приводного вала, которое в противном случае может быть вызвано механическим или крутящим моментом вокруг продольной оси привода, являющимся следствием усилия электродвигателя, в особенности когда упомянутый элемент предотвращения вращения и упомянутое крепежное средство расположены на противоположных сторонах привода.
Помимо привода, настоящее изобретение также относится к способу приведения в действие упомянутого привода и компьютерному программному продукту, содержащему компьютерный программный код для управления одним или несколькими процессорами привода, предпочтительно, упомянутый компьютерный программный продукт содержит материальный постоянный машиночитаемый носитель, содержащий хранящийся на нем компьютерный программный код. Более конкретно, упомянутый компьютерный программный код выполнен с возможностью инструктирования одного или нескольких процессоров привода управлять приводом так, чтобы он работал как ведущий или ведомый по отношению к другому приводу, который механически соединен с упомянутым приводом, для приведения в движение общей нагрузки, при этом, в случае, если привод установлен как ведущий, процессор принимает на входной клемме привода внешний сигнал управления положением, генерирует на основе упомянутого сигнала управления положением (и нагрузки) сигнал управления двигателем, например сигнал управления скоростью или сигнал управления моментом, управляет двигателем привода посредством подачи упомянутого сигнала управления двигателем в двигатель и управляет ведомым приводом посредством подачи упомянутого сигнала управления двигателем на выходную клемму привода; и при этом, в случае, если привод установлен как ведомый, процессор принимает на входной клемме сигнал управления двигателем, поданный ведущим приводом, и управляет двигателем посредством подачи упомянутого сигнала управления двигателем из ведущего привода в двигатель.
Краткое описание чертежей
Настоящее изобретение будет описано более подробно, в качестве примера, со ссылкой на чертежи, из которых:
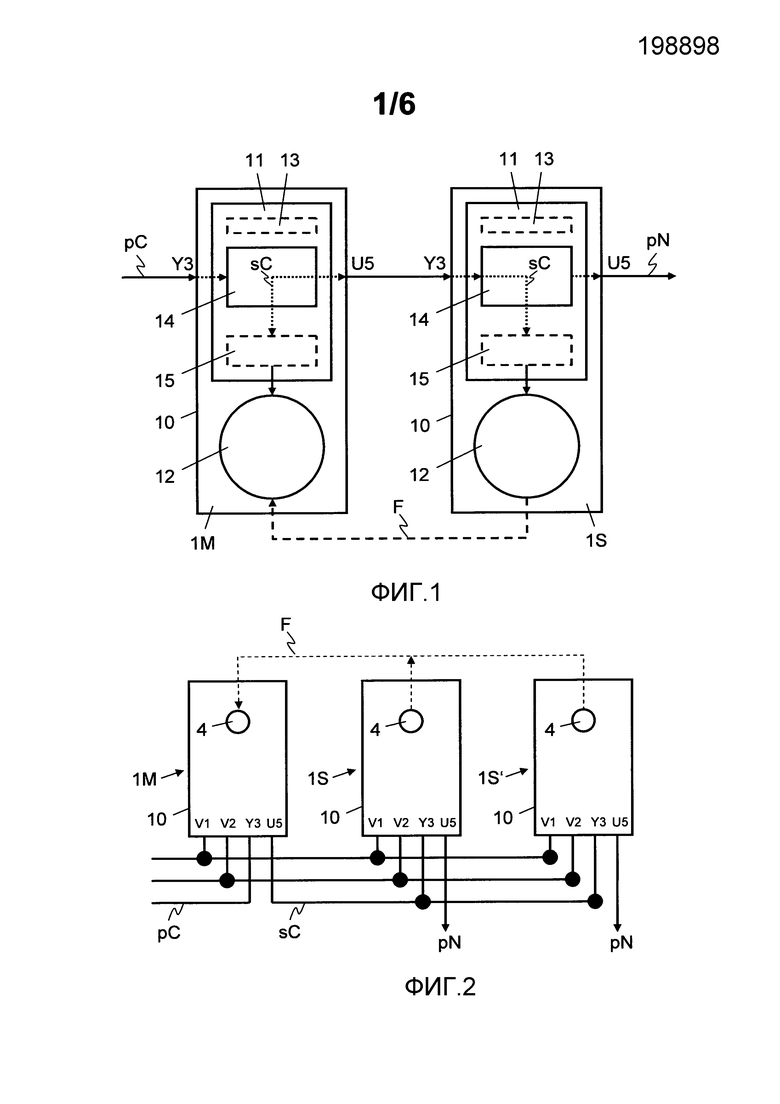
Фиг.1 представляет собой блок-схему, схематично показывающую два привода, которые механически соединены для приведения в движение общей нагрузки и установлены в конфигурации ведущий/ведомый.
Фиг.2 представляет собой блок-схему, схематично показывающую три привода, которые соединены проводами и установлены в конфигурации ведущий/ведомый для приведения в движение общей нагрузки.
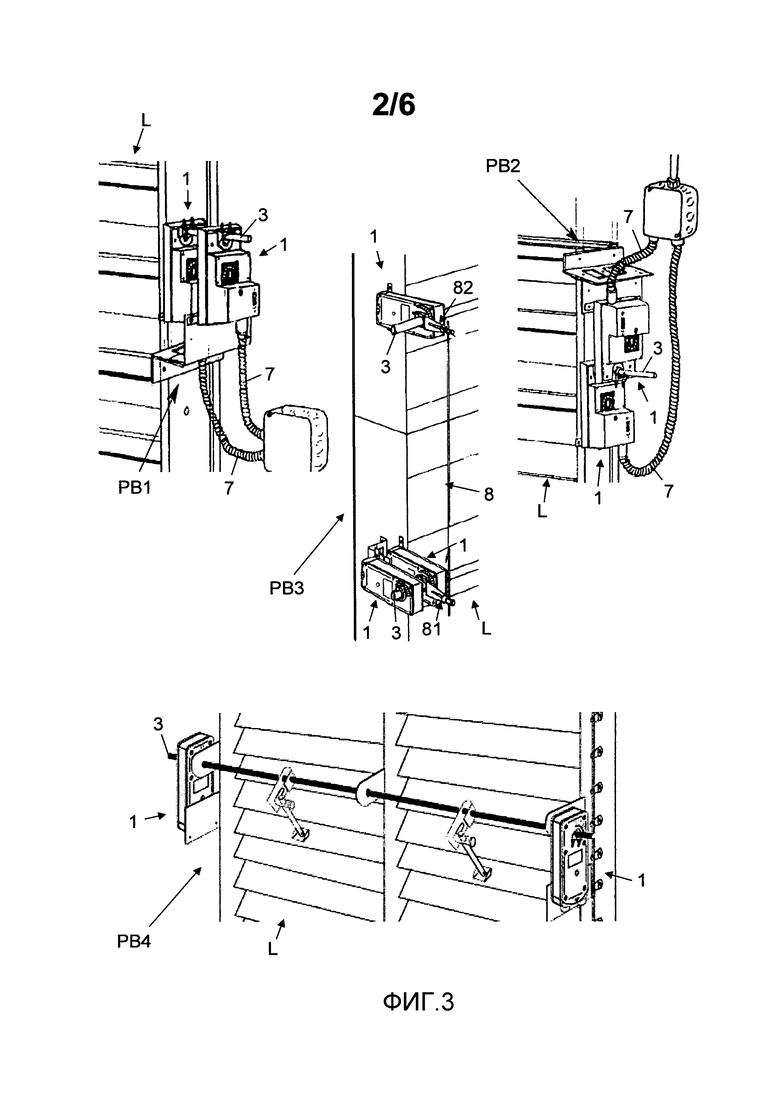
Фиг.3 показывает три разных примера комбинирования двух или более приводов для приведения в движение общей механической нагрузки.
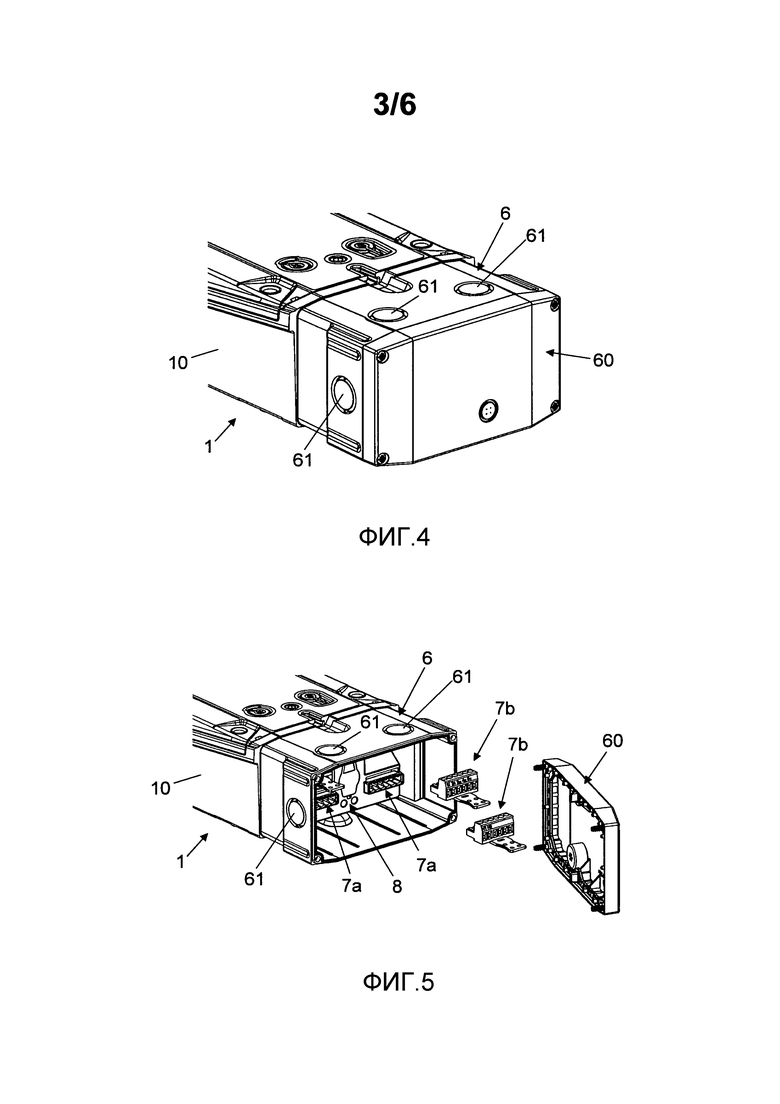
Фиг.4 представляет собой частичный вид привода, содержащего клеммную коробку, которая размещает электрические клеммы привода и содержит закрытую крышку.
Фиг.5 представляет собой частичный вид привода в состоянии, когда крышка клеммной коробки открыта.
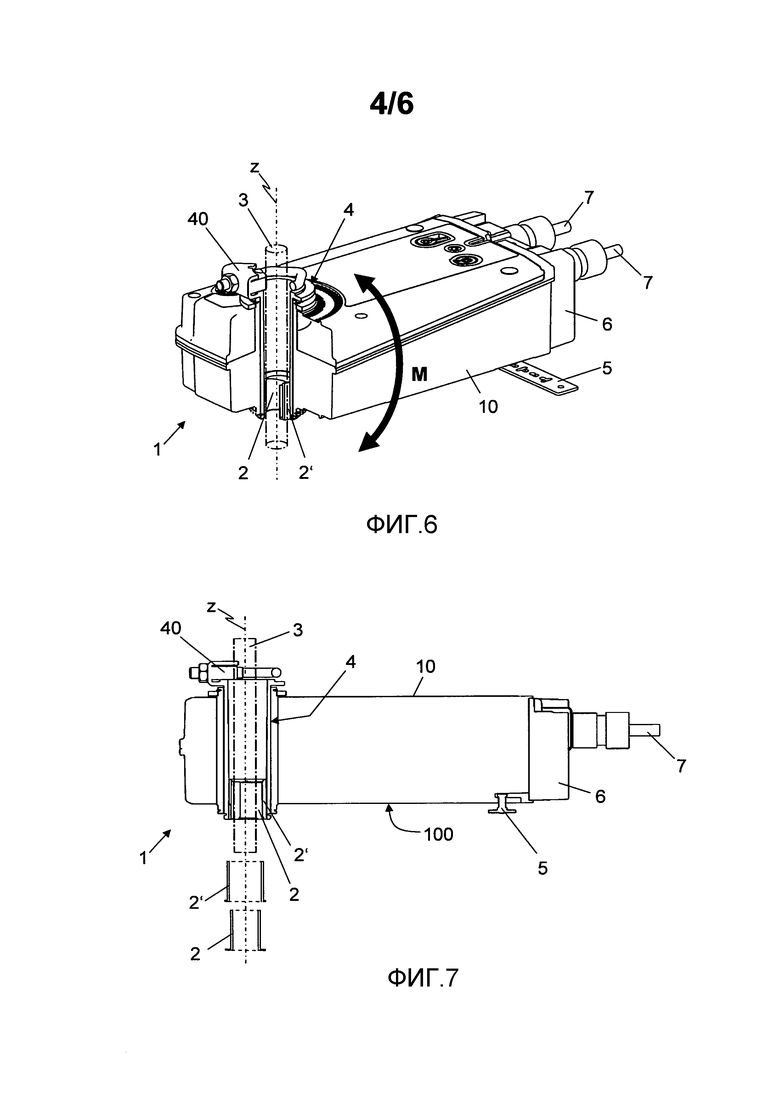
Фиг.6 представляет собой вид привода с разрезом, показывающим механическое устройство сопряжения для приема и соединения приводного вала с двигателем привода.
Фиг.7 представляет собой продольный разрез привода, показывающий механическое устройство сопряжения для приема и соединения приводного вала с двигателем.
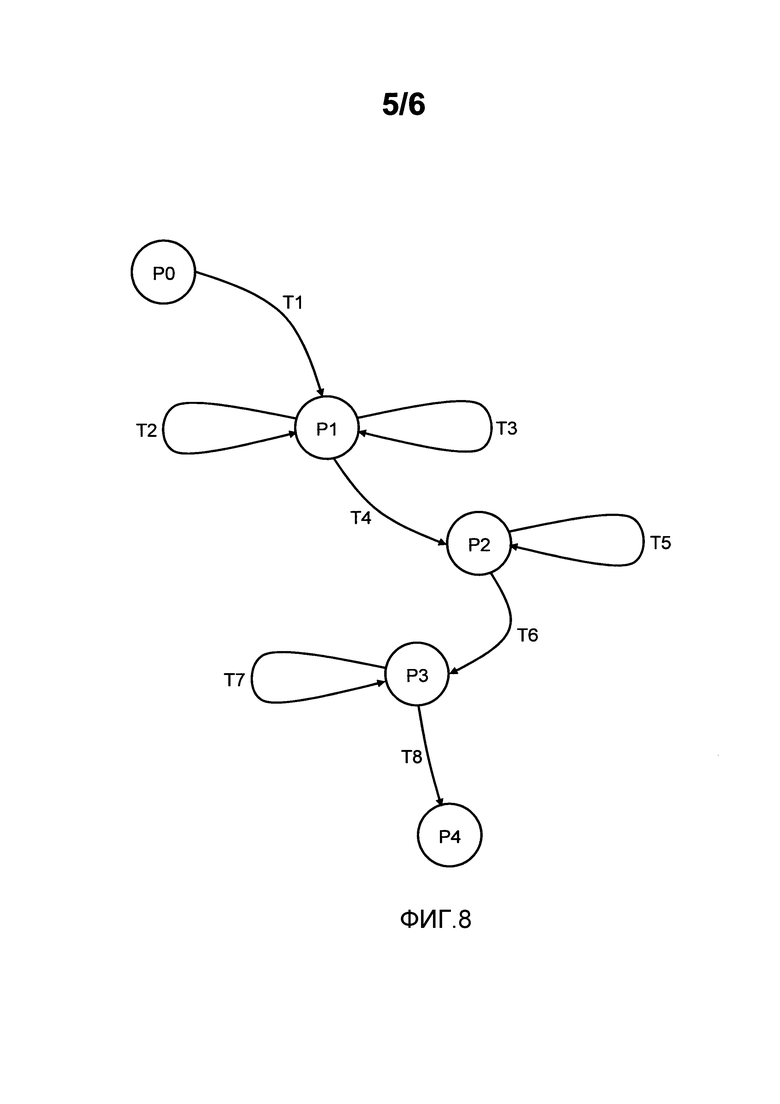
Фиг.8 представляет собой диаграмму состояний, показывающую примерную последовательность переходов для обнаружения в приводе, который установлен как ведущий.
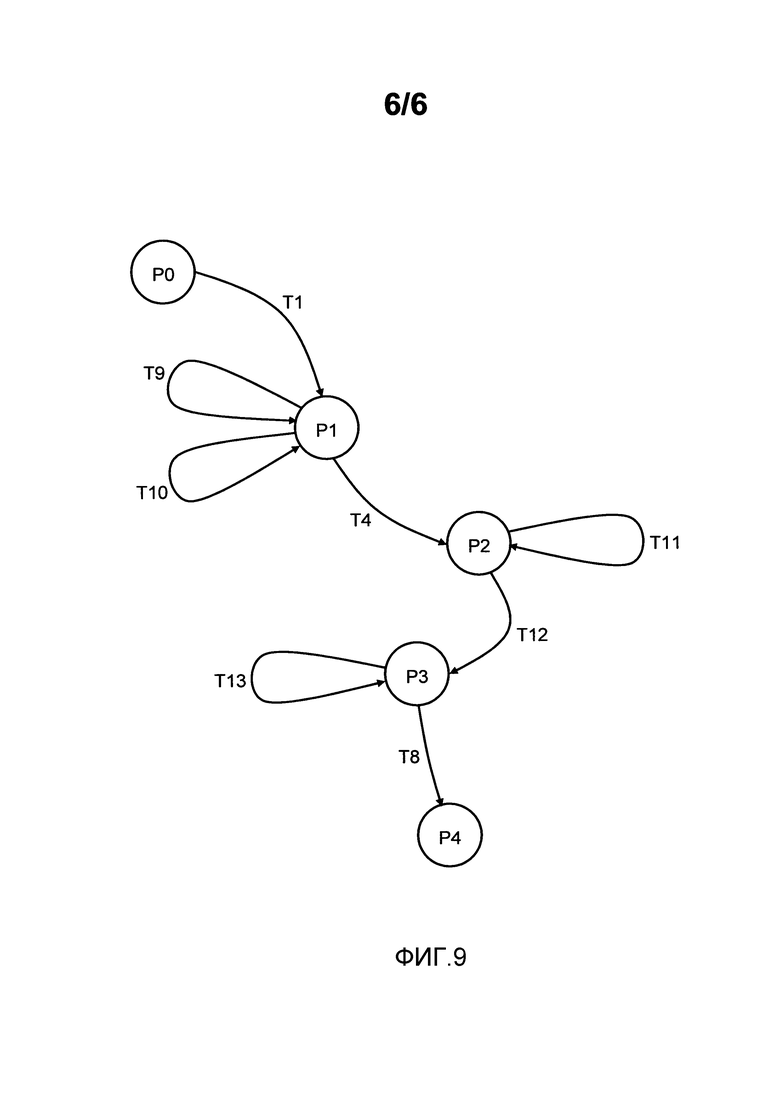
Фиг.9 представляет собой диаграмму состояния, показывающую примерную последовательность переходов для обнаружения в приводе, который установлен как ведомый.
Описание предпочтительных вариантов осуществления
На фиг.3, 4, 5, 6 и 7 ссылочная позиция 1 относится к приводу. На фиг.1 и 2 соответствующие приводы 1 обозначены ссылочными позициями 1М, 1S или 1S′, соответственно, при этом ссылочная позиция 1М относится к приводу 1, сконфигурированному как ведущий, а ссылочные позиции 1S, 1S′ относятся к приводам 1, сконфигурированным как ведомые. Как будет более подробно описано ниже, предпочтительно, конфигурация привода 1 определяется динамически и автоматически; однако специалисту в данной области техники будет понятно, что в качестве альтернативы режим ведомого или ведущего может быть установлен вручную для привода 1, например, посредством размещения соединительных проводов или ввода параметра режима через оперативные элементы и др. Например, параметризация и установление ведущего или ведомого режимов, соответственно, могут быть осуществлены через интерфейс связи, например шину связи приводов 1, 1М, 1S, 1S′, или через электрическую клемму, например выходную клемму U5, которая будет описана ниже, перед проводным монтажом приводов 1, 1М, 1S, 1S′, например.
Как схематично показано на фиг.1, приводы 1М, 1S содержат корпус 10 и размещенные в упомянутом корпусе электродвигатель 12 и контроллер 11 двигателя. Например, двигатель 12 представляет собой электродвигатель постоянного тока, в частности бесщеточный электродвигатель постоянного тока. Контроллер 11 двигателя включает в себя модуль 14 управления, необязательный модуль 15 задач электродвигателя и устройство 13 хранения данных, содержащее хранящиеся в нем один или несколько параметров привода, например, необязательный параметр скорости и/или параметр момента. Модуль 14 управления включает в себя пропорционально-интегральный регулятор (ПИ регулятор) или другой регулятор для генерирования сигнала sC управления двигателем, например сигнала управления скоростью или сигнала управления моментом (для управления током двигателя) в ответ на сигнал рС управления положением, принятый из внешней системы управления через электрическую входную клемму Y3 и зависящий от нагрузки. В варианте осуществления модуль 14 управления или ПИ регулятор выполнен с возможностью генерирования сигнала sC управления двигателем от внешнего сигнала рС управления положением и в зависимости от нагрузки, на основе хранимых параметров привода, например на основе параметра 13 скорости, который определяет для конкретного привода 1, 1М, 1S, 1S′ или его двигателя 12, соответственно, коэффициент перерасчета положение-скорость, и/или на основе параметра момента, который определяет для конкретного привода 1, 1М, 1S, 1S′ или его двигателя 12, соответственно, коэффициент перерасчета положение-момент. В других вариантах осуществления сигнал sC управления двигателем, генерируемый модулем 14 управления или ПИ регулятором, соответственно, выдается непосредственно в двигатель 12 или через необязательный модуль 15 задач двигателя, который реализован в виде специализированной интегральной схемы (двигателя), например, периодически, например, каждые 10 минут, принимает от модуля 14 управления или ПИ регулятора, соответственно, сигнал sC управления двигателем. Кроме того, модуль 14 управления включает в себя детектор режима, выполнен с возможностью определения, выполнен ли привод 1, 1М, 1S, 1S′ в необъединенной конфигурации (т.е. в обычном автономном режиме) или же он выполнен как ведущий (т.е. в режиме ведущего) или ведомый (т.е. в режиме ведомого) в объединенной конфигурации с одним или несколькими дополнительными приводами 1, 1М, 1S, 1S′, как будет более подробно описано ниже.
В варианте осуществления привод 1, 1М, 1S, 1S′ включает в себя два отдельных блока с отдельными корпусами, которые выполнены с возможностью электрического соединения для обмена сигналами управления; один блок содержит двигатель 12 и модуль 15 задач двигателя, а другой блок содержит детектор режима. В зависимости от варианта осуществления ПИ регулятор или другой регулятор для генерирования сигнала sC управления двигателем и устройство 13 хранения данных с параметрами привода реализованы в упомянутом первом блоке, вместе с двигателем 12, или в упомянутом другом блоке, вместе с детектором режима.
Функциональные модули контроллера 11 двигателя, включающие в себя модуль 14 управления, ПИ регулятор, детектор режима и необязательный модуль 15 задач двигателя, реализованы в виде программируемых программных модулей, которые управляют одним или несколькими процессорами, в виде другого программируемого логического блока, например специализированной интегральной схемы (ASIC), или полностью или частично в виде дискретных аппаратных элементов.
Как показано на фиг.6 и 7, приводы 1 содержат механическое устройство 4 сопряжения с кольцевым отверстием или каналом, расположенным концентрично относительно приводной оси z через привод 1, для приема приводного вала 3, например цилиндрического приводного вала механической нагрузки L, такой как клапан или демпфер. Механическое устройство 4 сопряжения содержит механическое крепежное средство 40, т.е. крепежное средство, такое как хомутный, штифтовой или болтовой соединитель, для прикрепления и механического соединения приводного вала 3 с двигателем 12. Кроме того, привод 1 содержит один или несколько трубчатых или кольцеобразных опорных элементов, по существу, в виде полого цилиндра, для краткости в дальнейшем называемых опорными кольцами 2, 2′, которые вставлены в упомянутое отверстие механического устройства 4 сопряжения, напротив отверстия, в котором размещено крепежное средство 40. Данные опорные кольца 2, 2′ заполняют зазор между приводным валом 3 и стенкой механического устройства 4 сопряжения и уменьшают люфт и поперечное перемещение приводного вала 3 относительно приводной оси z. Опорные кольца 2, 2′ выполнены с возможностью удаления и используются с разными и/или переменными диаметрами и толщинами в зависимости от диаметра приводного вала 3. В варианте осуществления поверхность опорных колец 2, 2′, например, содержит насечки или зазубрины. Как показано на фиг.6 и 7, привод 1 содержит также элемент 5 предотвращения вращения, расположенный на поверхности 100 привода 1 или его корпусе 10, соответственно. Элемент 5 предотвращения вращения прикреплен к приводу 1 и проходит за пределы ширины привода 1. Он содержит одно или несколько отверстий для прикрепления привода 1 к опорной конструкции, например, такой как стена, балка, стойка или труба. В вариантах установки, в которых элемент 5 предотвращения вращения и крепежное средство 40 расположены на противоположных поверхностях или сторонах привода 1 или его корпуса 10, соответственно, опорные кольца 2, 2′ предотвращают или по меньшей мере уменьшают поперечное перемещение приводного вала 3, которое в противном случае возникает вследствие механического момента М или крутящего момента вокруг продольной оси привода, являющегося результатом усилия двигателя 12. В альтернативных вариантах осуществления элемент 5 предотвращения вращения реализован, например, в виде одного или нескольких штифтов или винтов.
Как показано на фиг.4 и 5, приводы 1 дополнительно содержат клеммную коробку 6, в которой размещаются электрические клеммы 7а, 7b привода 1. Клеммная коробка 6 содержит четырехстороннюю стенку, которая окружает электрические клеммы 7а, 7b и либо прикреплена к остальному корпусу 10 привода 1, либо выполнена за одно целое с корпусом 10. Электрические клеммы 7а прикреплены к приводу 1 и принимают соединительные провода 7 непосредственно или посредством соединительных клемм 7b. Таким образом, клеммы 7а выполнены в виде гнезд, а клеммы 7b выполнены в виде разъемов, которые могут быть вставлены в упомянутое гнездо. Клеммная коробка 6 дополнительно содержит крышку 60 для открытия клеммной коробки 6, чтобы получить доступ к электрическим клеммам 7а, 7b и дополнительным оперативным элементам 8, которые также размещаются в клеммной коробке 8. В зависимости от варианта осуществления для открытия клеммной коробки 6 крышку 60 целиком удаляют с клеммной коробки 6 или ее поворачивают вокруг оси шарнира, посредством которой крышка 60 прикреплена к клеммной коробке 6. В своем закрытом положении крышка 60 соединена и прикреплена к стенке клеммной коробки 6 посредством винтов, хомутов или других крепежных средств. В варианте осуществления на крышке 60 и/или на стенке клеммной коробки 6 установлено окружающее уплотнительное кольцо для уплотнения зазора между стенкой клеммной коробки 6 и крышкой 60. Клеммная коробка 6 дополнительно содержит множество участков 61 разрыва для пропускания электрических проводов 7 через стенку клеммной коробки 6 для соединения проводов 7 с электрическими клеммами 7а, 7b. Провода 7 проводят через разрыв 61 непосредственно или посредством уплотнительного кабельного соединителя, который дополнительно предотвращает проникновение в клеммную коробку 6 разбрызгиваемой воды. Предпочтительно, для увеличения гибкости в размещении, монтаже и электропроводке привода 1, один или несколько участков 61 разрыва предусмотрены на всех боковых стенках клеммной коробки 6 таким образом, что отверстие может быть пробито через стенку или крышку 60 клеммной коробки 6 там, где это необходимо или удобно в конкретной ситуации.
Как показано на фиг.2, электрические клеммы включают в себя по меньшей мере две клеммы V1, V2 питания, входную клемму Y3 для приема сигналов управления и выходную клемму U5 для выдачи выходных данных или сигнала обратной связи.
На фиг.3 показаны разные примеры двух или более приводов 1, которые расположены в объединенной конфигурации для приведения в движение общей нагрузки L. В частности, объединенные приводы 1 механически соединены так, чтобы совместно приводить в движение общую нагрузку L. Ссылочная позиция РВ1 относится к варианту совмещения, в котором два привода 1 установлены друг на друга с одинаковой ориентацией и коаксиальным размещением их механических устройств 4 сопряжения так, что приводной вал 3 механической нагрузки L, в данном случае демпфера, проходит через механические устройства 4 сопряжения обоих приводов 1. В варианте совмещения РВ2 два привода 1 установлены с противоположной ориентацией, перекрываясь только с их коаксиально расположенными механическими устройствами 4 сопряжения так, что приводной вал 3 проходит через оба механических устройства 4 сопряжения. В варианте совмещения РВ3 задействованы три привода 1; причем два из упомянутых трех приводов 1 расположены так же, как в варианте РВ1, и приводят в движение первый рычаг 81, прикрепленный к приводному валу, проходящему через их механические устройства 4 сопряжения; третий привод 1 установлен отдельно от двух других приводов и приводит в движение второй рычаг 82. Три привода 1 варианта совмещения РВ3 механически соединены в том смысле, что два рычага 81, 82 связаны посредством стержня так, чтобы приводить в движение общую нагрузку L. В варианте совмещения РВ4 два привода 1 установлены на противоположных сторонах их общей нагрузки L, в данном случае демпфера, и содержат приводной вал 3, который соединен с механической нагрузкой L, проходит через их механические устройства 4 сопряжения. Специалисту в данной области техники будет понятно, что существует множество других способов механического соединения двух или более приводов 1 для совместного приведения в движение общей нагрузки L, т.е. в объединенной конфигурации.
На фиг.1 и 2 показаны приводы 1М, 1S, 1S′, которые механически соединены в варианте объединения, причем в каждом случае одни из приводов 1М установлен как ведущий (привод) других приводов 1S, 1S′, которые установлены в каждом случае как ведомый (привод). Более конкретно, ведущий привод 1М содержит свою входную клемму Y3, соединенную с внешней системой управления, для приема сигнала рС управления положением. Кроме того, выходная клемма U5 ведущего привода 1М соединена с входной клеммой (клеммами) Y3 ведомого привода (приводов) 1S, 1S′ для передачи ведомым приводам 1S,1S′ сигнала sC управления двигателем. Выходная клемма U5 ведомых приводов 1S, 1S′ соединена, например, с внешней системой управления для выдачи сигнала pN индикатора положения (обратной связи). На фиг.1 и 2 стрелка F схематично показывает механическое соединение или обратную связь по усилию объединенных ведомых приводов 1S, 1S′ с ведущим приводом 1М. Клеммы V1, V2 питания приводов 1М, 1S, 1S′ соединены проводом параллельно с внешним источником питания.
В приведенных ниже абзацах со ссылкой на фиг.8 и 9 описаны возможные последовательности шагов и переходов состояния, осуществляемые функциональными модулями приводов 1, 1М, 1S, 1S′ для определения, установлен ли привод 1, 1М, 1S, 1S′ в автономном режиме (без объединения) или в объединенной конфигурации или в режиме ведущего или в режиме ведомого.
На фиг.8 показана последовательность этапов и переходов Т1, Т2, Т3, Т4, Т5, Т6, Т7, Т8 (Т1-Т8) между разными этапами РО, Р1, Р2 и Р4 (РО-Р4) для обнаружения в приводе 1, 1М, что он конфигурирован и установлен как ведущий.
На фиг.9 показана последовательность этапов и переходов Т1, Т9, Т10, Т4, Т11, Т12, Т13, Т8 между разными этапами РО-Р4 для обнаружения в приводе 1, 1S, 1S′, что он конфигурирован и установлен как ведомый.
На первоначальном этапе РО пуска, когда привод 1, 1М, 1S, 1S′ включают, на выходную клемму U5 привода 1, 1М, 1S, 1S′ подается заданное первоначальное управляющее напряжение, например, равное 9В, например, посредством контроллера 11 двигателя или модуля 14 управления, соответственно. По истечении заданного времени активации, например 200 мс, модуль 14 управления или детектор режима, соответственно, устанавливает таймер этапа на заданный период времени для этапа Р1, например, 800 мс, и перемещает привод 1, 1М, 1S, 1S′, на переходе Т1, с этапа РО на этап Р1.
На этапе Р1 модуль 14 управления или детектор режима привода 1, 1М, 1S, 1S′, соответственно, периодически контролирует уровень напряжения на своей входной клемме Y3. Если привод 1, 1S, 1S′ смонтирован как ведомый, то на его входной клемме Y3 измеряют заданное первоначальное управляющее напряжение, например, 9В, и, как показано на фиг.9, на переходе Т9, модуль 14 управления или детектор режима, соответственно, правильно устанавливает индикатор ведомого и переводит таймер этапа на уменьшенный период времени для этапа Р1, например, 400 мс. Затем, если заданное первоначальное управляющее напряжение, например 9В, снова измеряют на входной клемме Y3, когда индикатор ведомого уже установлен правильно, то на переходе Т10, таймер этапа для оставшегося периода времени для этапа Р1 устанавливается на ноль.
Как только истекает заданный период времени для этапа Р1, на переходе Т4, привод 1, 1М, 1S, 1S′ переходит с этапа Р1 на этап Р2 посредством модуля 14 управления или детектора режима, соответственно.
На этапе Р2, если индикатор ведомого установлен правильно, на переходе Т11, модуль 14 управления или детектор режима, соответственно, уменьшает импеданс входной клеммы Y3 привода до уменьшенного уровня, например, с первоначальных 100 кОм до 1 кОм. Уровень импеданса уменьшают на короткий период времени, например, на 100 мс. Уменьшение уровня импеданса входной клеммы Y3 привода вызывает резкое падение уровня напряжения на выходной клемме U5 ведущего привода 1М, соединенного проводом с ведомым приводом 1S, 1S′. Затем, например, по истечении заданного периода времени, на переходе Т12, привод 1, 1S, 1S′ перемещается на этап Р3 посредством своего модуля 14 управления или детектора режима, соответственно, и таймер этапа устанавливается на заданный период времени для этапа Р3, например 600 мс.
На этапе Р1, если привод 1М смонтирован как ведущий, он остается на этапе Р1 и обеспечивает заданное управляющее напряжение на своей выходной клемме U5, как показано на фиг.8 посредством этапа Т2, до тех пор пока отсутствует прерывание и таймер этапа для этапа Р1 еще не закончен. Однако его модуль 14 управления или детектор режима будет обнаруживать резкое падение уровня напряжения на его выходной клемме U5 как прерывание, просигнализированное одним или несколькими ведомыми приводами 1S, 1S′. Затем, как показано на фиг.8, на переходе Т3, модуль 14 управления или детектор режима привода 1М устанавливает индикатор режима на «режим ведущего» и устанавливает таймер этапа для оставшегося периода времени для этапа Р1 на ноль. Затем, на переходе Т4, ведущий привод 1М переходит с этапа Р1 на этап Р2 посредством своего модуля 14 управления или детектора режима, соответственно.
На этапе Р2, если индикатор режима установлен на «режим ведущего», на переходе Т5, модуль 14 управления или детектор режима ведущего привода 1М, соответственно, уменьшает уровень напряжения на его выходной клемме U5 до уменьшенного уровня управляющего напряжения, например 7В. Затем, например, по истечении заданного периода времени, на переходе Т6, привод 1М переходит на этап Р3 посредством своего модуля 14 управления или детектора режима, соответственно, и таймер этапа устанавливается на заданный период времени для этапа Р3, например 600 мс. На этапе Р3 на выходной клемме U5 привода 1М поддерживается уменьшенный уровень управляющего напряжения, например 7В, если его индикатор режима установлен на «режим ведущего».
На этапе Р3, если индикатор ведомого установлен правильно, то модуль 14 управления или детектор режима привода 1, 1S, 1S′, соответственно, периодически контролирует уровень напряжения на своей входной клемме Y3. Если привод 1, 1S, 1S′ выполнен как ведомый, то на его входной клемме Y3 будет измерено уменьшенное управляющее напряжение например 7В, и, как показано на фиг.9, на переходе Т13, модуль 14 управления или детектор режима, соответственно, устанавливает индикатор режима на «режим ведомого».
Необходимо отметить, что пример, показанный в данном документе, описывает только обнаружение или индикацию ведомого на основе уменьшения уровня управляющего напряжения; однако специалисту в данной области техники будет понятно, что возможны другие схемы, которые включают в себя одно или несколько понижений и/или повышений уровня управляющего напряжения.
Как только заданный период времени для этапа Р3 истекает, на переходе Т8, привод 1, 1М, 1S, 1S′ переходит с этапа Р3 на этап Р4 посредством своего модуля 14 управления или детектора режима, соответственно.
На этапе Р4 привод 1, 1М, 1S, 1S′ начинает работать как ведущий или ведомый, если его индикатор режима установлен на «режим ведущего» или «режим ведомого», соответственно; в противном случае он работает как обычный автономный привод, который не конфигурирован в объединенной конфигурации. В варианте осуществления с дополнительной возможностью для ручной и/или основанной на связи параметризации привода как ведущего или ведомого, решение о соответствующем режиме принимается на этапе Р4, после исполнения алгоритма определения режима на этапах Р1, Р2, Р3-Р4.
В «режиме ведущего» модуль 14 управления ведущего привода 1М активирует свой ПИ регулятор. ПИ регулятор принимает или измеряет на входной клемме Y3 привода сигнал pC управления положением, выданный внешней системой управления, и генерирует сигнал sC управления двигателем, например сигнал управления скоростью или сигнал управления моментом, на основе принятого сигнала рС управления положением и нагрузки. Например, сигнал управления двигателем генерируется как широтно-модулированный (ШИМ) сигнал. Модуль 14 управления выдает генерированный сигнал sC управления двигателем на свой внутренний двигатель 12, непосредственно или через модуль 15 задач двигателя, и на свою выходную клемму U5.
В «режиме ведомого» модуль 14 управления ведомого привода 1S, 1S′ деактивирует свой ПИ регулятор. Модуль 14 управления принимает или измеряет на входной клемме Y3 привода сигнал sC управления двигателем, выданный ведущим приводом 1М, и выдает принятый сигнал sC управления двигателем на свой внутренний двигатель 12, непосредственно или через модуль 15 задач двигателя. Кроме того, в «режиме ведомого» модуль 14 управления ведомого привода 1S, 1S′ выдает на свою выходную клемму U5 сигнал pN индикатора положения (обратной связи).
В «автономном режиме» модуль 14 управления привода 1 активирует свой ПИ регулятор так, чтобы генерировать сигнал sC управления двигателем, основанный на сигнале рС управления положением, принятом на его входной клемме Y3 из внешней системы управления, и зависящий от нагрузки. Модуль 14 управления выдает генерированный сигнал sC управления двигателем на свой внутренний двигатель 12 и выдает на свою выходную клемму U5 сигнал pN индикатора положения (обратной связи).
Необходимо отметить, что в описании компьютерный программный код связан с конкретными функциональными модулями, и последовательность этапов или переходов представлена в конкретном порядке, однако специалисту в данной области техники будет понятно, что компьютерный программный код может быть структурирован по другому и что порядок по меньшей мере некоторых этапов или переходов может быть изменен, без отхода от объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНОЕ НАТЯЖНОЕ УСТРОЙСТВО | 2003 |
|
RU2296896C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2632390C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ МОЩНОСТИ (ВАРИАНТЫ) И БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1999 |
|
RU2267042C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2602164C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕССТУПЕНЧАТО-РЕГУЛИРУЕМОЙ КОРОБКИ ПЕРЕДАЧ | 1997 |
|
RU2178109C2 |
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| ПРИВОДНАЯ СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534465C2 |
| СИСТЕМА ПЕРЕДАЧИ МОЩНОСТИ И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2018 |
|
RU2687406C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2518144C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ КОРОБКИ ПЕРЕДАЧ С НАСОС-МОТОРОМ ПЕРЕМЕННОГО РАБОЧЕГО ОБЪЕМА | 2007 |
|
RU2415320C1 |
Группа изобретений относится к приводам, содержащим электродвигатели. Технический результат - создание электропривода, который выполнен с возможностью совместной работы с одним или несколькими другими приводами. Для этого предложен привод с электродвигателем и контроллером двигателя, который выполнен с возможностью работы в качестве ведущего или ведомого по отношению к другому приводу и который механически соединен для приведения в движение общей нагрузки. В случае, если привод установлен как ведущий, контроллер двигателя принимает на входной клемме внешний сигнал управления положением, генерирует сигнал управления двигателем для управления электродвигателем на основе сигнала управления положением и подает сигнал управления двигателем на выходную клемму для управления ведомым приводом. В случае, если привод установлен как ведомый, контроллер двигателя управляет двигателем посредством подачи на двигатель сигнала управления электродвигателем, принятого из ведущего привода. 2 н. и 11 з.п. ф-лы, 9 ил.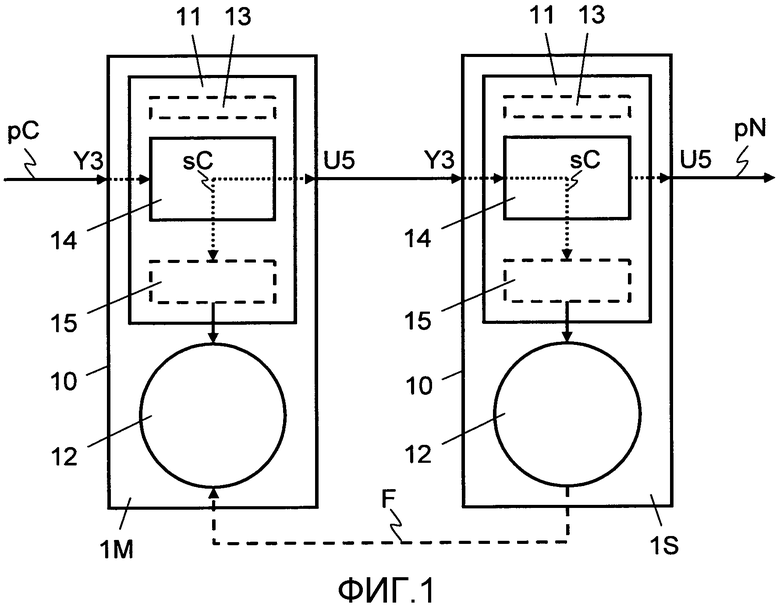
1. Привод (1, 1М, 1S, 1S′), содержащий электродвигатель (12) и контроллер (11) двигателя, причем
привод (1, 1М, 1S, 1S′) выполнен с возможностью работы в качестве ведущего или ведомого по отношению к другому приводу (1, 1М, 1S, 1S′), который механически соединен с упомянутым приводом (1, 1М, 1S, 1S′), для приведения в движение общей нагрузки (L);
контроллер (11) двигателя, в случае, если привод (1М) установлен как ведущий, выполнен с возможностью приема на входной клемме (Y3) внешнего сигнала (рС) управления положением, генерирования на основе упомянутого сигнала (рС) управления положением сигнала (sC) управления двигателем, управления двигателем (12) посредством подачи сигнала (sC) управления двигателем в двигатель (12) и управления ведомым приводом посредством подачи сигнала (sC) управления двигателем на выходную клемму (U5); и
контроллер (11) электродвигателя, в случае, если привод (1S, 1S′) установлен как ведомый, дополнительно выполнен с возможностью приема на входной клемме (Y3) сигнала (sC) управления двигателем, поданного ведущим приводом, и управления двигателем (12) посредством подачи сигнала (sC) управления двигателем от ведущего привода в двигатель (12).
2. Привод (1, 1М, 1S, 1S′) по п. 1, в котором контроллер (11) двигателя дополнительно выполнен с возможностью измерения в момент пуска уровней напряжения на входной клемме (Y3) и установления привода (1S, 1S′) как ведомого в зависимости от уровней напряжения, измеренных на входной клемме (Y3).
3. Привод (1, 1М, 1S, 1S′) по п. 1 или 2, в котором контроллер (11) двигателя дополнительно выполнен с возможностью уменьшения импеданса входной клеммы (Y3), обнаружения на выходной клемме (U5) снижения напряжения, вызванного уменьшенным импедансом другого привода (1S, 1S′), соединенного с выходной клеммой (U5), и установления привода (1М) как ведущего при обнаружении снижения напряжения на выходной клемме (U5).
4. Привод (1, 1М, 1S, 1S′) по п. 1, в котором контроллер (11) двигателя дополнительно выполнен с возможностью установления в момент пуска заданного первого уровня напряжения на выходной клемме (U5) и установления заданного второго уровня напряжения на выходной клемме (U5), после того как установлен как ведущий, причем упомянутый заданный второй уровень напряжения отличается от упомянутого первого уровня напряжения.
5. Привод (1, 1М, 1S, 1S′) по п. 1, в котором контроллер (11) двигателя дополнительно выполнен с возможностью, в случае, если привод (1S, 1S′) установлен как ведомый, обеспечения на выходной клемме (U5) сигнала (pN) положения, показывающего положение двигателя привода.
6. Привод (1, 1М, 1S, 1S′) по п. 1, в котором привод (1, 1М, 1S, 1S′) дополнительно содержит один или несколько хранимых параметров привода; и контроллер (11) двигателя дополнительно выполнен с возможностью генерирования сигнала (sC) управления двигателем на основе упомянутых параметров привода и упомянутого сигнала (pN) управления положением.
7. Привод (1, 1М, 1S, 1S′) по п. 1, в котором привод (1) дополнительно выполнен с возможностью работы в качестве автономного привода (1); и контроллер (11) двигателя, в случае, если привод (1) установлен как автономный привод (1), дополнительно выполнен с возможностью приема на входной клемме (Y3) внешнего сигнала (рС) управления положением, генерирования на основе упомянутого сигнала (pN) управления положением сигнала (sC) управления двигателем, управления двигателем (12) посредством подачи сигнала (sC) управления положением в двигатель (12) и обеспечения на выходной клемме (U5) сигнала (pN) положения, показывающего текущее положение привода.
8. Привод (1, 1М, 1S, 1S′) по п.1, дополнительно содержащий клеммную коробку (6), причем упомянутая клеммная коробка (6) размещает электрические клеммы (7а) привода (1, 1М, 1S, 1S′) и содержит участки (61) разрыва для подведения электрических проводов (7) через клеммную коробку (6) к электрическим клеммам (7а).
9. Привод (1, 1М, 1S, 1S′) по п. 8, в котором привод (1, 1М, 1S, 1S′) дополнительно содержит элементы (8) ручного управления, размещенные в клеммной коробке (6).
10. Привод (1, 1М, 1S, 1S′) по п. 8, в котором клеммная коробка (6) содержит съемную крышку (60), причем упомянутая съемная крышка (60) в закрытом положении предохраняет электрические клеммы (7а) от разбрызгиваемой жидкости, а в открытом положении обеспечивает доступ к по меньшей мере одному из: электрических клемм (7а) и элементов (8) ручного управления.
11. Привод (1, 1М, 1S, 1S′) по п. 1, дополнительно содержащий механическое устройство (4) сопряжения с двумя отверстиями на противоположных сторонах для приема приводного вала (3), причем упомянутое механическое устройство (4) сопряжения содержит размещенное в одном из упомянутых отверстий крепежное средство (40) для соединения приводного вала (3) с двигателем (12) и содержит вставленное в противоположное одно из упомянутых отверстий одно или несколько опорных колец (2, 2′), выполненных с возможностью приема приводного вала (3) и уменьшения поперечного перемещения приводного вала (3) относительно приводной оси (z), проходящей через упомянутые два отверстия.
12. Привод (1, 1М, 1S, 1S′) по п. 11, в котором упомянутый привод (1, 1М, 1S, 1S′) дополнительно содержит элемент (5) предотвращения вращения, расположенный на поверхности (100) привода (1, 1М, 1S, 1S′), и опорные кольца (2, 2′) вставлены в одно из упомянутых отверстий, которое расположено на поверхности (100) привода (1, 1М, 1S, 1S′), содержащей элемент (5) предотвращения вращения, расположенный на ней.
13. Способ приведения в действие привода (1, 1М, 1S, 1S′), который содержит электродвигатель (12) и контроллер (11) двигателя, причем упомянутый способ содержит этапы, на которых:
конфигурируют привод (1, 1М, 1S, 1S′) для работы в качестве ведущего или ведомого по отношению к другому приводу (1, 1М, 1S, 1S′), который механически соединен с упомянутым приводом (1, 1М, 1S, 1S′) для приведения в движение общей нагрузки (L);
при этом, в случае, если привод (1, 1М, 1S, 1S′) сконфигурирован как ведущий:
принимают на входной клемме (Y3) привода (1М) внешний сигнал (рС) управления положением,
генерируют на основе сигнала (рС) управления положением сигнал (sC) управления двигателем,
управляют двигателем (12) привода (1М) посредством подачи сигнала (sC) управления двигателем в двигатель (12) и
управляют ведомым приводом посредством подачи сигнала (sC) управления двигателем на выходную клемму (U5) привода (1М); и
при этом, в случае, если привод (1, 1S, 1S′) сконфигурирован как ведомый:
принимают на входной клемме (Y3) сигнал (sC) управления двигателем, поданный ведущим приводом, и
управляют двигателем (12) посредством подачи сигнала (sC) управления электродвигателем от ведущего привода в двигатель (12).
| US 5656903 A1, 12.08.1997 | |||
| US 4258552 A1, 31.03.1981 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 7183736 B1, 27.02.2007 | |||
| US 7417386 B2, 26.08.2008 | |||
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |

