ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к визуализации объема. Изобретение также относится к генерации двумерной проекции набора данных объемного изображения.
УРОВЕНЬ ТЕХНИКИ
С пользовательской точки зрения визуализация объема позволяет пользователю быстро изучить набор данных объемного изображения и выбрать область, интересующую пользователя, например, радиолога. Такие алгоритмы, как проекция комбинированной интенсивности (CIP), проекция максимальной интенсивности (MIP), проекция ближайшего сосуда (CVP), проекция средней интенсивности (AIP) и проекция объемной интенсивности (VIP), основаны на отслеживании лучей. Для каждого пикселя отображаемого изображения отслеживается луч от упомянутого пикселя через объем данных изображения. Интенсивность пикселя вычисляется на основании интенсивностей вокселов вдоль отслеживаемого луча. Для MIP интенсивность пикселя равна интенсивности воксела вдоль отслеживаемого луча, имеющего самую высокую интенсивность. Для CVP интенсивность пикселя равна интенсивности первого воксела вдоль отслеживаемого луча, имеющего максимальную интенсивность, возможно локальную максимальную интенсивность, большую порога CVP. Для AIP интенсивность пикселя равна среднему значению интенсивностей вокселов вдоль отслеживаемого луча. Однако информация, содержащаяся в этих изображениях, не учитывает местоположение пикселей вдоль отслеживаемого луча.
В проекции объемной интенсивности (VIP) интенсивности вокселов вдоль луча, отслеживаемого из пикселя, преобразуются путем умножения на весовые коэффициенты. Чем больше расстояние от воксела до упомянутого пикселя, тем меньше весовой коэффициент. Вокселы с взвешенными интенсивностями затем используются для вычисления изображения с использованием, например, MIP.
US 2010/0053159 A1 раскрывает систему для воспроизведения с помощью CIP изображения на основании набора данных объемного изображения, систему, содержащую блок вычисления для вычисления начальной интенсивности пикселя изображения, определенной соответствующей интенсивностью соответствующего воксела, содержащегося в наборе данных объемного изображения; и блок настройки для вычисления конечной интенсивности пикселя на основании начальной интенсивности пикселя и на местоположении соответствующего воксела. В отличие от системы, использующей метод проекции объемной интенсивности, которая включает в себя регулировку интенсивности вокселов, содержащихся в наборе данных изображения, система процитированной заявки приспособлена для регулировки интенсивности пикселей. В частности, конечная интенсивность пикселей зависит от расстояния соответствующего воксела до плоскости проекции.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Было бы полезно иметь улучшенную визуализацию объема. Для решения этой проблемы первый аспект изобретения обеспечивает систему, содержащую:
- детектор особенностей для детектирования особенности в наборе данных объемного изображения;
- подсистему вычисления расстояния для вычисления расстояния от особенности до элемента изображения набора данных объемного изображения;
- подсистему взвешивания для взвешивания значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения;
- генератор проекции для генерации проекции набора данных объемного изображения на основании взвешенного значения элемента изображения, при этом значение элемента проекции основано на взвешенном значении элемента изображения.
Этот метод может использоваться для улучшения проекции структур, которые ожидаются в известном месте относительно особенности. Поскольку значение элемента изображения взвешено на основании расстояния от элемента изображения до особенности на изображении, проекция приспособлена для выделения некоторой области или областей и/или ослабления другой области или областей в зависимости от расстояния до особенности. Следовательно, выделенные области визуализируются более подробно по сравнению с другими областями изображения. Кроме того, проекция менее загромождена деталями изображения, которые могут присутствовать в ослабленных областях. Проекция может содержать двумерную проекцию, в этом случае значение элемента проекции содержит значение пикселя. Проекция может содержать проецирование. Следует иметь в виду, что значение элемента проекции может быть основано на двух или более взвешенных значениях элементов изображения, которые могут быть интерполированы для получения более точного значения элемента проекции.
Особенность может содержать по меньшей мере часть границы объекта, представленного набором данных объемного изображения. Таким образом, область вблизи границы может быть усилена (или ослаблена), тогда как области вдали от границы могут быть ослаблены (или усилены). Например, центральная часть внутренней части объекта может быть ослаблена, а часть вблизи внешней поверхности объекта может быть усилена. Таким образом, структура изображения части объекта вблизи внешней поверхности объекта не загромождена структурой изображения центральной внутренней части объекта.
Граница может содержать границу между телом и воздухом, при этом тело может включать в себя тело человека или животного. Соответственно, объект может содержать представление по меньшей мере части тела человека или животного. Взвешивание может быть основано на расстоянии от кожи. Таким образом, система может быть сконфигурирована усиливать структуры вблизи от кожи или усиливать структуры глубоко в теле. Система может также быть сконфигурирована ослаблять структуры вблизи от кожи или ослаблять структуры глубоко в теле.
Подсистема взвешивания может быть приспособлена для усиления элемента изображения, расположенного вблизи от кожи, и/или ослабления элемента изображения, расположенного в центральной части тела. Например, при исследовании сосудистых структур вблизи от кожи изображение может быть загорожено сердцем, аортой и крупными сосудами. В таком случае система может быть сконфигурирована усиливать структуры вблизи от кожи и/или ослаблять структуры глубоко внутри тела. Это может иметь место, например, при MR томографии груди.
Подсистема вычисления расстояния может быть приспособлена для вычисления расстояния относительно элемента изображения внутри объекта. Таким путем визуализация внутренней части объекта взвешивается на основании расстояния от внешней границы объекта. Опционально, область за пределами объекта обрабатывается по-другому. Например, область за пределами объекта может быть обрезана, например, путем установки значений элементов изображения, расположенных вне объекта, равными нулю. Альтернативно, эти значения элементов изображения могут быть оставлены без изменений или взвешены с небольшим весовым коэффициентом. Также возможно взвесить эти значения элементов изображения на основании расстояния до обнаруженной особенности.
Подсистема взвешивания может быть приспособлена для вычисления весовых коэффициентов согласно передаточной функции, связывающей весовые коэффициенты с расстоянием. Это позволяет гибко конфигурировать весовые коэффициенты.
Подсистема взвешивания может быть приспособлена использовать первую передаточную функцию для элементов изображения на первой стороне особенности и другую вторую передаточную функцию для элементов изображения на второй стороне особенности, противоположной первой стороне.
Генератор проекции может быть приспособлен для генерации проекции комбинированной интенсивности, проекции максимальной интенсивности, проекции средней интенсивности или проекции ближайшего сосуда объема, содержащего взвешенные значения элементов изображения. Эти взвешенные значения элементов изображения были взвешены, как было указано выше.
Генератор проекции может быть приспособлен для вычисления одного значения любого элемента изображения. Это та ситуация, для которой система хорошо подходит, потому что весовые коэффициенты применяются к одному значению, и визуализируется одно значение. Таким образом, локальная структура изображения выделяется путем взвешивания одного значения. Такое значение является, например, значением интенсивности или уровнем серого. Одно значение множества (соседних) элементов изображения может быть объединено, например, с помощью интерполяции.
Генератор проекции может быть приспособлен для обработки элементов изображения, расположенных на луче, отслеживаемом от пикселя, для определения значения пикселя, и соответствующий элемент изображения может быть расположен в значительной степени на луче, отслеживаемом от пикселя. Это обеспечивает полезную проекцию набора данных объемного изображения с взвешенными значениями элементов изображения.
В другом аспекте изобретение обеспечивает устройство получения изображений, содержащее указанную выше систему. Например, устройство получения изображений содержит сканер изображения и консоль просмотра, при этом указанная выше система применена к изображению, полученному сканером изображения, и результирующая проекция, генерируемая указанной выше системой, отображается на консоли просмотра.
В другом аспекте изобретение обеспечивает рабочую станцию, содержащую указанную выше систему.
В другом аспекте изобретение обеспечивает способ визуализации объема, содержащий:
- детектирование особенности в наборе данных объемного изображения;
- вычисление расстояния от особенности до элемента изображения набора данных объемного изображения;
- взвешивание значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения; и
- генерацию двумерной проекции набора данных объемного изображения на основании взвешенного значения элемента изображения.
В другом аспекте изобретение обеспечивает компьютерный программный продукт, содержащий команды, заставляющие процессорную систему выполнять указанный выше способ.
Специалистам в области техники следует иметь в виду, что два или более вышеупомянутых вариантов осуществления, вариантов осуществления и/или аспектов изобретения могут быть объединены любым образом, который может считаться полезным. Аналогично, следует иметь в виду, что изобретение применимо к любому виду данных объемного изображения, в том числе к трехмерным, четырехмерным или имеющим большее число измерений данным изображения, данным, получающимся как результат любого метода диагностической визуализации, такого как компьютерная томография, магнитно-резонансная томография, позитронно-эмиссионная томография и ультразвуковые исследования. Например, взвешивание может быть основано на временном измерении. Кроме того, проекция на выходе не ограничена двумерным выходным изображением, а может быть изображением, имеющим большее число измерений или меньшее число измерений.
Модификации и вариации устройства получения изображений, рабочей станции, системы и/или компьютерного программного продукта, которые соответствуют описанным модификациям и вариациям системы, могут быть осуществлены специалистом в области техники на основе настоящего описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут очевидны и будут объяснены со ссылкой на варианты осуществления, описанные ниже. На чертежах:
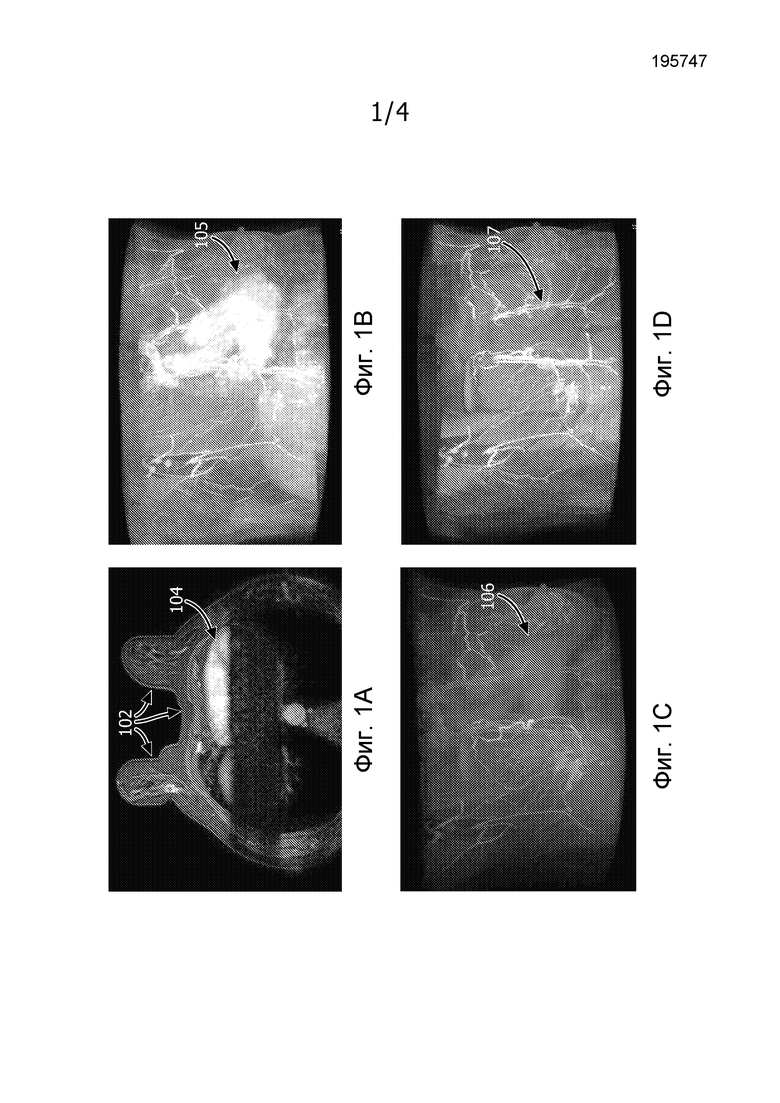
фиг.1A показывает срезы с динамическим контрастированием набора данных MRI;
фиг.1B показывает MIP набора данных MRI;
фиг.1C показывает результат z-ослабления;
фиг.1D показывает результат z-ослабления в зависимости от преобразования по расстоянию;
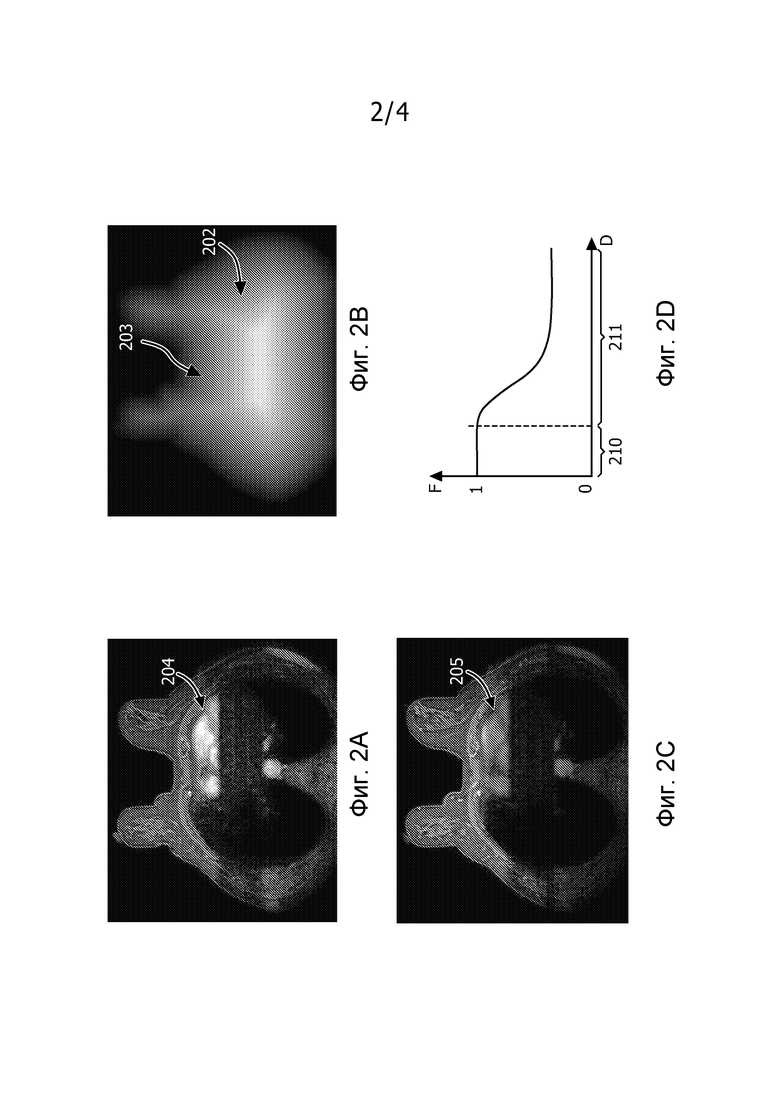
фиг.2A показывает срезы с динамическим контрастированием набора данных MRI;
фиг.2B показывает представление преобразования по расстоянию;
фиг.2C показывает срез набора данных MRI после ослабления;
фиг.2D показывает функцию ослабления;
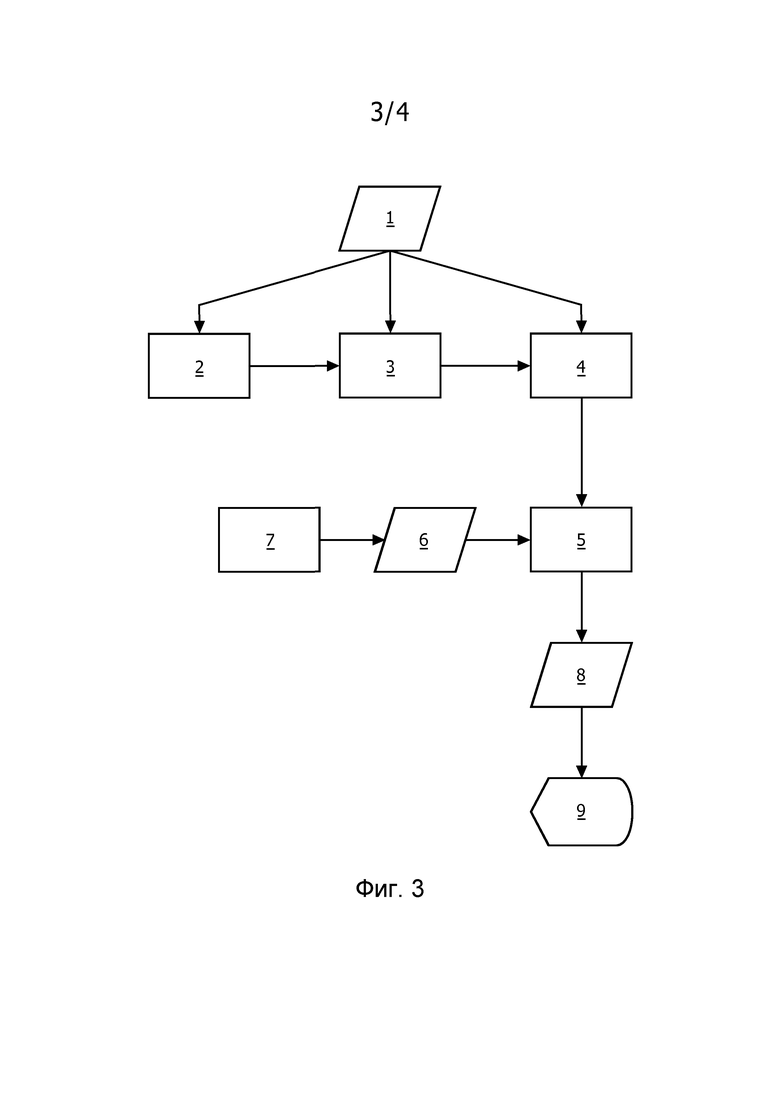
фиг.3 является блок-схемой системы визуализации объема; и
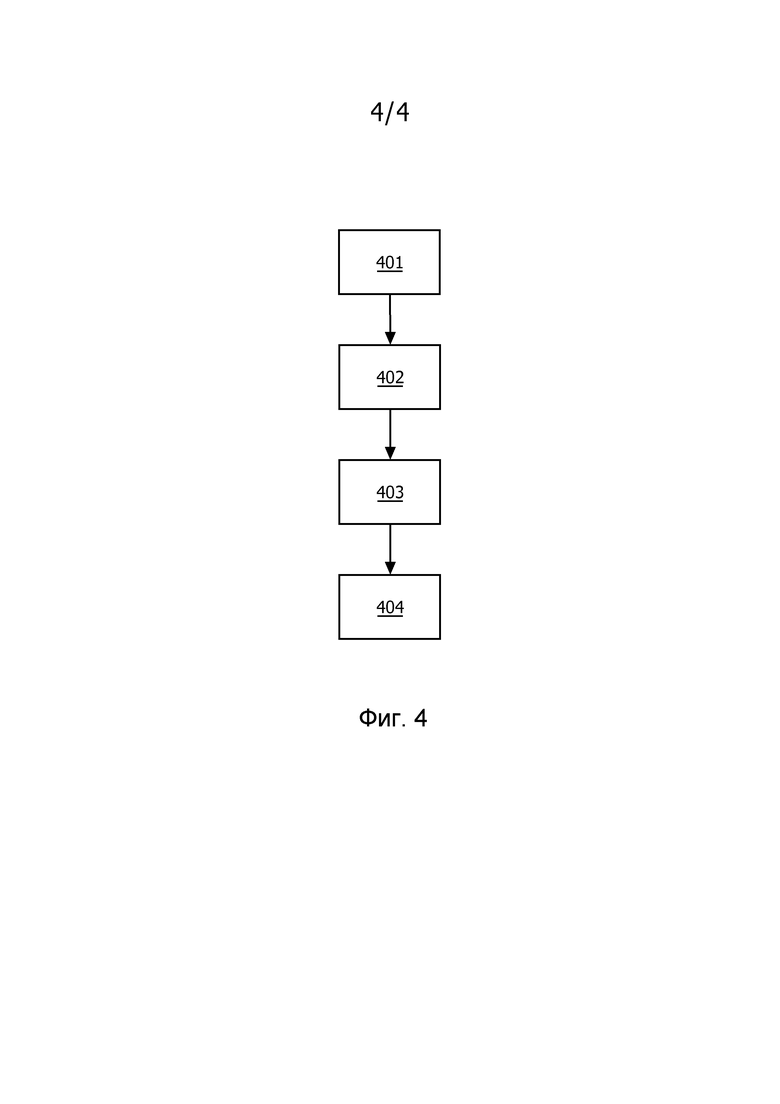
фиг.4 является блок-схемой последовательности операций способа визуализации объема.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
MIP является широко распространенным методом визуализации отчасти из-за своей простоты. MIP проецирует значения максимальной интенсивности вдоль лучей, пересекающих объем изображения, на плоскость проекции.
Фиг.1A показывает осевой срез набора данных MRI с динамическим контрастированием (DCE), а фиг.1B показывает традиционный переднезадний вид MIP набора данных MRI. Очевидно, сердце 104, 105 является доминирующей яркой структурой, которая перекрывается с клинически важной тканью 102 молочной железы в MIP. Это делает MIP неподходящим для просмотра этого типа MRI с динамическим контрастированием. Фиг.1C показывает результат z-ослабления для улучшения MIP, используя способ, описанный в US 2010/0053159 A1. Этот метод улучшает отображение накладывающихся структур, таких как сосуды на ярком фоне, все из которых имеют приблизительно одинаковые значения интенсивности. Визуализация сердца 106 ослаблена. Фиг.1D показывает результат изображения MIP, сделанного после ослабления значений вокселов на основании преобразования по расстоянию, как описано в этой заявке. На фиг.1D, видна структура сосуда 107, который перекрывает сердце, эта структура сосуда плохо отображена на фиг.1A и 1B.
Ослабление уровней яркости в клинически важных областях может привести к потере зависимости между значением воксела с контрастированием и отображенными значениями. На фиг.1C явно видно, что несколько ярких сосудов с идентичной интенсивностью в объеме получают различную интенсивность на экране. В существующих способах, которые используют ослабление значения воксела, величина ослабления зависит от ориентации проекции относительно объема. Следовательно, вращение проекции приводит к изменению интенсивности структуры на изображении в MIP, что может иметь нежелательный эффект.
Для получения проекции, показанной на фиг.1D, было применено ослабление сигнала на основании преобразования по расстоянию. Ослабленный сигнал вычислялся до вычисления максимальной интенсивности вдоль луча проекции. Величина ослабления может быть определена с помощью функции ослабления, которая отображает расстояние в коэффициент ослабления. Эта функция ослабления может быть нелинейной, определяемой пользователем функцией. В примере на фиг.1D величина ослабления основана не на направлении просмотра, а на преобразовании по расстоянию. Для примера MR груди, показанного на фиг.1, преобразование по расстоянию было определено как расстояние от воксела до кожи пациента. Функция ослабления может быть выбрана так, что все важные структуры в пределах некоторого расстояния от кожи будут отчетливо видны, а структуры глубже в теле (дальше всего от кожи) будут ослаблены.
Яркая структура, которая должна быть ослаблена, может находиться близко к структуре, которая не должна быть ослаблена. Преобразование по расстоянию позволяет осуществлять точное определение клинически важных структур и их усиление или ослабление. При использовании проекций сосудов с контрастированием сосуды, как ожидается, будут самыми яркими структурами. С помощью этого способа поддерживается отношение между значениями данных и отображенными значениями в тех областях, которые важны. Это обеспечивает уверенность в методе отображения. Значения вокселов не меняются при изменении ориентации MIP. Следовательно, вращение MIP не меняет значения вокселов и соответствующие значения пикселов, и значимые структуры, которые должны быть отображены, сохраняются, что является желательным эффектом.
Для конкретных приложений, таких как подмышечная впадина, традиционным MIP мешают не относящиеся к делу яркие структуры, загораживающие интересующие нас структуры. Например, для данных MRI груди сердце является сильно доминирующей структурой, которая препятствует обследованию сосудов внутри и вблизи груди и подмышечной впадины. MIP не всегда может обеспечить правильное представление важных структур с помощью 3D.
Фиг.2A показывает срез набора данных MRI с динамическим контрастированием (DCE), подобный таковому на фиг.1A, с сердцем 204, проявляющимся в качестве доминирующей яркой структуры. По этому изображению была получена карта расстояний, на которой каждому элементу изображения присвоено кратчайшее расстояние до любого из пикселей кожи. Визуальное представление среза карты расстояний показано на фиг.2B, где белый цвет 202 обозначает большое расстояние до кожи, а темный цвет 203 обозначает меньшее расстояние до кожи или до внешней стороны тела. Фиг.2C показывает срез, изображенный на фиг.2A, после ослабления на основании преобразования по расстоянию, показанного на фиг.2B. Пример функции ослабления F как функции преобразования D по расстоянию показан на фиг.2D.
Фиг.3 изображает систему визуализации объема. Такая система может содержать дисплей 9, пользовательское устройство ввода 7 и средство хранения данных (не показано), такое как магнитный диск или оперативная память, для хранения, в числе прочего, набора 1 данных объемного изображения и/или проекции 8. Система может дополнительно содержать один или более процессоров для выполнения компьютерной программы, которая может также храниться на средстве хранения данных. Система может иметь коммуникационный порт для приема и/или передачи данных, например, от сервера к серверу. Элементы, описанные здесь, могут быть реализованы, частично или полностью, в виде машинных команд, которые могут выполняться одним или более процессорами.
Система может быть приспособлена для хранения по меньшей мере части набора 1 данных объемного изображения в средстве хранения данных. Система может иметь возможность получать набор 1 данных объемного изображения из любого возможного источника, в том числе съемных носителей, сервера, доступного через систему связи, или встроенного устройства получения изображений. Набор 1 данных объемного изображения содержит элементы изображения; каждый элемент изображения может представлять собой свойство небольшой части пространства, представленного набором данных объемного изображения. Система может включать в себя сканер изображения, известный в области техники, для генерации набора данных объемного изображения.
Система может содержать детектор 2 особенностей, приспособленный для обнаружения особенностей в наборе 1 данных объемного изображения. Такая особенность может содержать любую особенность изображения, в частности, структуру изображения, такую как край, или объект, или по меньшей мере часть границы объекта. Детектор может включать в себя вариант осуществления любого алгоритма обнаружения особенностей, известного в области техники, для выполнения обнаружения особенности. Местоположение особенности используется подсистемой 3 вычисления расстояния. Так как особенность может охватывать множество элементов изображения, детектор 2 особенностей может, например, обеспечивать в качестве выходных данных список элементов изображения, которые являются частью особенности.
Система может дополнительно содержать подсистему 3 вычисления расстояния для вычисления расстояния от особенности до элемента изображения набора 1 данных объемного изображения. Подсистема 3 вычисления расстояния может быть приспособлена для вычисления расстояния до особенности для множества элементов изображения, например, практически всех элементов изображения набора 1 данных объемного изображения или практически всех элементов изображения в подобъеме набора 1 данных объемного изображения. Альтернативно, расстояние может быть вычислено для, например, регулярно расположенного подмножества элементов изображения в наборе данных объемного изображения или подобъеме. Расстояние может быть кратчайшим расстоянием от элемента изображения до особенности, то есть расстоянием до точки особенности, которая является ближайшей к элементу изображения. Например, в случае, если выходные данные детектора особенностей содержат список элементов изображения, подсистема вычисления расстояния может быть приспособлена для вычисления расстояния от элемента изображения особенности, которая является ближайшей к рассматриваемому элементу изображения.
Система может содержать подсистему 4 взвешивания для взвешивания значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения. Взвешивание может увеличить или уменьшить значение элемента изображения, которое зависит от расстояния. Например, весовой коэффициент может быть выбран на основании расстояния и умножен на значение элемента изображения для получения взвешенного значения элемента изображения. Иллюстративный весовой коэффициент является единицей, деленной на расстояние. Когда такой весовой коэффициент используется как множитель, значения элементов изображения уменьшаются сильнее для значений элементов изображения, которые находятся дальше от особенности. Аналогично подсистеме 3 вычисления расстояния, подсистема 4 взвешивания может быть приспособлена для вычисления весовых коэффициентов для всех или подмножества элементов изображения.
Система может содержать генератор 5 проекций для генерации проекции 8 набора 1 данных объемного изображения на основании взвешенного значения элемента изображения, в котором значение элемента проекции 8 основано на взвешенном значении элемента изображения. Возможно, что подсистема 3 вычисления расстояния и подсистема 4 взвешивания обрабатывают множество элементов изображения или все элементы изображения так, что получается по меньшей мере частично взвешенный набор данных объемного изображения. Генератор 5 проекции может быть приспособлен для генерации проекции такого (по меньшей мере частично) взвешенного набора данных объемного изображения. Так как проекция содержит другое изображение, значение элемента проекции может быть понято как значение элемента изображения проекции. Такое значение может быть значением интенсивности или уровнем яркости. Генератор проекции может быть приспособлен для отслеживания луча от элемента проекции через объем и вычисления взвешенных значений элементов изображения вдоль луча. Такому элементу проекции может быть присвоено значение элемента проекции на основании тех взвешенных значений элементов изображения. Например, самое большое такое взвешенное значение элемента изображения может быть присвоено значению элемента проекции для получения MIP взвешенных значений элементов изображения. Проекция может быть двухмерной проекцией изображения, в этом случае элементами проекции являются пиксели, а значениями элементов проекции являются значения пикселей.
В конкретном примере особенность, которая обнаруживается детектором особенностей, может содержать по меньшей мере часть границы между телом и воздухом, то есть кожу. Таким образом, подсистема вычисления расстояния вычисляет расстояние от элемента изображения до кожи тела. Вышеупомянутая подсистема вычисления расстояния может быть приспособлена вычислять кратчайшее расстояние до особенности, в этом случае кожи. Подсистема 4 взвешивания может быть приспособлена для усиления элемента изображения, расположенного вблизи от кожи, и/или ослабления элемента изображения, расположенного в центральной части тела, на основании вычисленных расстояний.
Подсистема 3 вычисления расстояния может быть приспособлена для вычисления расстояния от границы объекта до элемента изображения внутри объекта. Это также имеет место, когда объект является телом. Система может быть приспособлена для того, чтобы игнорировать любые элементы изображения вне объекта. Обратное также возможно, в этом случае рассматриваются только элементы изображения вне объекта.
Подсистема 4 взвешивания приспособлена для вычисления весовых коэффициентов согласно передаточной функции, связывающей весовой коэффициент с расстоянием. Такая передаточная функция может содержать линейную или нелинейную функцию. Фиг.2D показывает пример передаточной функции. Этот пример показывает постоянную часть 210, где значение равно 1, для элементов изображения, близких к особенности, и часть 211, в которой значение постепенно уменьшается до более низкого, фиксированного значения. Это может использоваться для уменьшения значений элементов изображения, которые находятся дальше от особенности.
Подсистема 4 взвешивания может быть приспособлена для использования первой передаточной функции для элементов изображения на первой стороне особенности и другой второй передаточной функции для элементов изображения на второй стороне особенности, противоположной первой стороне. Этот прием может использоваться, в частности, там, где набор данных объемного изображения может быть разделен на две стороны особенности, что имеет место, когда особенность является границей объекта, такого как тело. В последнем случае изображение делится на часть внутри объекта и часть вне объекта. Эти части могут быть взвешены по-разному. Например, любая из частей может быть установлена равной 0, чтобы полностью удалить часть из проекции.
Генератор 5 проекции может быть приспособлен для генерации проекции комбинированной интенсивности, проекции максимальной интенсивности, проекции средней интенсивности или проекции ближайшего сосуда, содержащей взвешенные значения элементов изображения. Генератор 5 проекции может быть приспособлен для принятия параметров 6 проекции, которыми может управлять пользователь через элемент 7 пользовательского интерфейса. Параметры 6 проекции могут включать в себя любое направление просмотра, увеличение и необходимый тип проекции.
Генератор 5 проекции может быть приспособлен для вычисления одного значения любого элемента изображения. Например, система может быть приспособлена для обработки одноканальных наборов данных, то есть полутонового изображения, а не цветного изображения. Однако система может также быть приспособлена для обработки цветных изображений. В последнем случае взвешивание может быть применено к множеству цветных каналов для каждого соответствующего элемента изображения, и метод проекции, подходящий для наборов данных объемных цветных изображений, известный в области техники, может быть использован для генерации проекции взвешенного набора данных объемного цветного изображения.
Фиг.4 показывает блок-схему последовательности операций способа визуализации объема. Способ содержит этап 401 обнаружения особенности в наборе данных объемного изображения, этап 402 вычисления расстояния от особенности до элемента изображения набора данных объемного изображения, этап 403 взвешивания значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения и/или этап 404 генерации двумерной проекции набора данных объемного изображения на основании взвешенного значения элемента изображения. В связи с этим описанием могут быть реализованы вариации способа. Способ может быть реализован в виде компьютерного программного продукта.
Генерация MIP с использованием преобразования по расстоянию может содержать следующие этапы:
- Обнаружение кожи (или другого объекта, в зависимости от применения).
- Генерацию карты расстояний (также называемой преобразованием по расстоянию). Каждому вокселу в изображении присвоено расстояние до самой близкой точки кожи (или другого объекта).
- Выбор автоматически или вручную части карты расстояний или комбинации карт расстояний.
- Применение функции ослабления к данным, которая берет значение карты расстояний в качестве входных данных и создает коэффициент ослабления в качестве выходных данных; значение воксела умножается на этот коэффициент ослабления.
Следует иметь в виду, что изобретение также применимо к компьютерным программам, в частности компьютерным программам на или в носителе, адаптированным для осуществления изобретения. Программа может быть в виде исходного кода, объектного кода, промежуточного исходного кода и объектного кода, например в частично откомпилированном виде, или в любом другом виде, подходящем для использования в варианте осуществления способа согласно изобретению. Следует также иметь в виду, что такая программа может иметь много различных архитектурных решений. Например, программный код, реализующий функциональность способа или систему согласно изобретению, может быть подразделен на одну или более подпрограмм. Специалистам в области техники будут очевидны много различных способов распределения функциональности между этими подпрограммами. Подпрограммы могут храниться вместе в одном исполняемом файле для формирования автономной программы. Такой исполняемый файл может содержать выполняемые компьютером команды, например команды процессора и/или команды интерпретатора (например, команды интерпретатора Java). Альтернативно, одна, несколько или все подпрограммы могут храниться по меньшей мере в одном внешнем файле библиотеки и быть связанными с основной программой статически или динамически, например, во время выполнения. Основная программа содержит по меньшей мере один вызов по меньшей мере одной из подпрограмм. Подпрограммы могут также содержать вызовы друг друга. Вариант осуществления, относящийся к компьютерному программному продукту, содержит исполняемые компьютером команды, соответствующие каждому этапу обработки по меньшей мере одного из способов, изложенных здесь. Эти инструкции могут быть подразделены на подпрограммы и/или сохранены в одном или более файлах, которые могут быть связаны статически или динамически. Другой вариант осуществления, относящийся к компьютерному программному продукту, содержит исполняемые компьютером команды, соответствующие каждому средству по меньшей мере одной из систем и/или продуктов, описанных здесь. Эти инструкции могут быть подразделены на подпрограммы и/или сохранены в одном или более файлах, которые могут быть связаны статически или динамически.
Носитель компьютерной программы может быть любым объектом или устройством, способным содержать программу. Например, носитель может включать в себя носитель данных, такой как ROM, например, CD-ROM или полупроводниковый ROM, или магнитный носитель информации, например магнитный жесткий диск. Кроме того, носитель может быть передаваемым носителем, таким как электрический или оптический сигнал, который может быть передан через электрический или оптический кабель, или по радио, или с помощью других средств. Когда программа осуществлена в таком сигнале, носитель может состоять из такого кабеля или другого устройства или средства. Альтернативно, носитель может быть интегральной схемой, в которую встроена программа, интегральной схемой, адаптированной для выполнения или для использования при выполнении соответствующего способа.
Следует отметить, что вышеупомянутые варианты осуществления скорее иллюстрируют, а не ограничивают изобретение, и что специалисты в области техники смогут разработать много альтернативных вариантов осуществления, не выходя за рамки объема прилагаемой формулы изобретения. В формуле изобретения любые ссылочные позиции, заключенные в круглые скобки, не должны толковаться как ограничение формулы изобретения. Использование глагола "содержать" и его спряжений не исключает наличие элементов или этапов помимо заявленных в формуле изобретения. Единственное число элемента не исключает наличие множества таких элементов. Изобретение может быть реализовано с помощью аппаратных средств, содержащих несколько отдельных элементов, и с помощью соответствующим образом запрограммированного компьютера. В перечисляющем несколько средств пункте формулы изобретения, описывающем устройство, несколько из этих средств могут быть осуществлены с помощью одного и того же элемента аппаратных средств. Простой факт, что некоторые меры изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована с выгодой.
Изобретение относится к технологиям визуализации объемных данных. Техническим результатом является улучшение визуализации объема за счет того, что пиксельное значение проекции основано на взвешенном значении элемента изображения. Предложена система для генерации двумерной проекции набора данных объемного изображения. Система содержит детектор особенностей для детектирования особенности в наборе данных объемного изображения. Система также содержит подсистему вычисления расстояния для вычисления расстояния от особенности до элемента изображения набора данных объемного изображения. Кроме того, в состав системы входит подсистема взвешивания для взвешивания значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения. 5 н. и 8 з.п. ф-лы, 10 ил.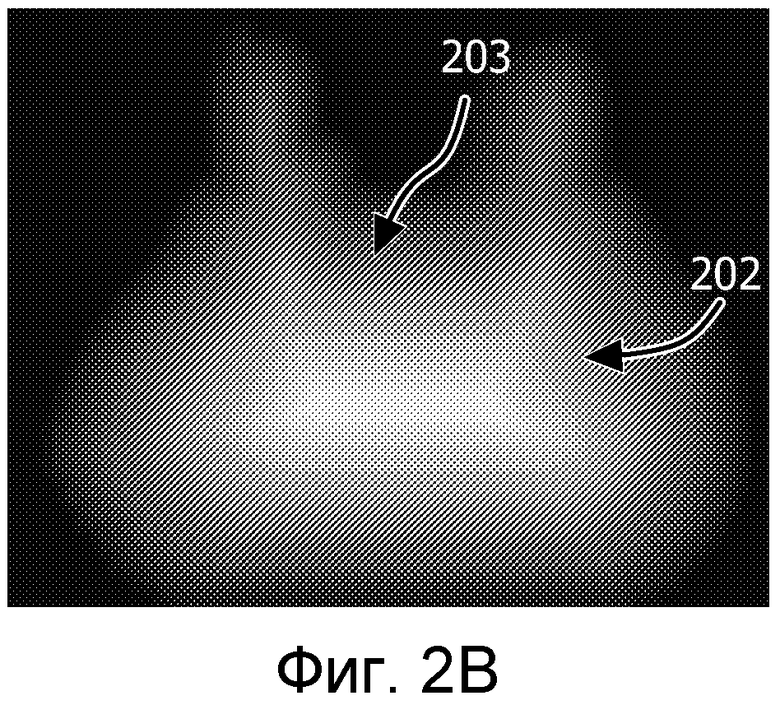
1. Система для генерации двумерной проекции (8) набора (1) данных объемного изображения, содержащая:
детектор (2) особенностей для детектирования особенности в наборе (1) данных объемного изображения;
подсистему (3) вычисления расстояния для вычисления расстояния от особенности до элемента изображения набора (1) данных объемного изображения;
подсистему (4) взвешивания для взвешивания значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения;
генератор (5) проекции для генерации двумерной проекции (8) набора (1) данных объемного изображения на основании взвешенного значения элемента изображения, при этом двумерная проекция содержит проецирование, а пиксельное значение проекции (8) основано на взвешенном значении элемента изображения.
2. Система по п. 1, в которой особенность содержит по меньшей мере часть границы объекта, представленного набором данных объемного изображения.
3. Система по п. 2, в которой граница содержит границу между телом и воздухом.
4. Система по п. 3, в которой подсистема (4) взвешивания приспособлена для усиления элемента изображения, расположенного вблизи кожи, и/или ослабления элемента изображения, расположенного в центральной части тела.
5. Система по п. 4, в которой подсистема (3) вычисления расстояния приспособлена для вычисления расстояния от границы объекта до элемента изображения внутри объекта.
6. Система по п. 1, в которой подсистема (4) взвешивания приспособлена для вычисления весовых коэффициентов согласно передаточной функции, связывающей весовые коэффициенты с расстоянием.
7. Система по п. 6, в которой подсистема (4) взвешивания приспособлена для использования первой передаточной функции для элементов изображения на первой стороне особенности и другой второй передаточной функции для элементов изображения на второй стороне, противоположной первой стороне.
8. Система по п. 1, в которой генератор (5) проекции приспособлен для генерации проекции комбинированной интенсивности, проекции максимальной интенсивности, проекции средней интенсивности или проекции ближайшего сосуда объема, содержащего взвешенные значения элементов изображения.
9. Система по п. 1, в которой генератор (5) проекции приспособлен для вычисления одного значения любого элемента изображения.
10. Устройство получения изображений, содержащее систему по п. 1.
11. Рабочая станция, содержащая систему по п. 1.
12. Способ генерации двумерной проекции (8) набора (1) данных объемного изображения, содержащий:
детектирование (401) особенности в наборе данных объемного изображения;
вычисление (402) расстояния от особенности до элемента изображения набора данных объемного изображения;
взвешивание (403) значения элемента изображения на основании расстояния для получения взвешенного значения элемента изображения; и
генерацию (404) двумерной проекции набора данных объемного изображения на основании взвешенного значения элемента изображения, проекции, содержащей проецирование, при этом значение пикселя проекции основано на взвешенном значении элемента изображения.
13. Носитель данных, хранящий компьютерный программный продукт, причем компьютерный программный продукт содержит команды, предписывающие процессорной системе выполнять способ по п. 12.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ получения фенил-альфа-нафтилкетона | 1950 |
|
SU92595A1 |

