Изобретение относится к области приборостроения, а именно к пилотажно-навигационному оборудованию транспортных самолетов и вертолетов.
Известна пилотажно-навигационная система транспортного летательного аппарата [1], содержащая магнитный компас, барометрические датчики скорости и высоты, ультразвуковой датчик высоты, спутниковую навигационную систему (СНС), гировертикаль, устройство получения курсовой видовой информации, исполнительные механизмы.
Недостаток такой пилотажно-навигационной системы состоит в том, что она не обеспечивает посадку на промежуточных пунктах маршрута.
Наиболее близкой по технической сущности является пилотажно-навигационная система транспортного летательного аппарата [2], содержащая предназначенную для выполнения функций двух пилотов аппаратуру текущих пилотажно-навигационных параметров (АТПН) для измерения курса, углов крена и тангажа, воздушной скорости, барометрической высоты, высоты посредством радиовысотомера, для определения координат посредством радиосистем, индикатор пилотажно-навигационной обстановки (ИПНО) и блок формирования команд (БФК) в кабине экипажа, блок коммутации (БК), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БК подключен к входу БИК, при этом в ней в качестве исполнителя функций второго пилота выполнен автоматический навигатор в составе курсовой системы (КС), спутниковой навигационной системы (СНС), блока программы маршрута (БПМ), бортовой цифровой вычислительной машины (БЦВМ), первого преобразователя сигналов (ПС-1), второго преобразователя сигналов (ПС-2), причем выход БФК подключен к одному из входов БК, выходы устройств АТПН подключены к входам ПС-1, выходы ПС-1, БПМ, СНС, КС, ПП подключены к входам БЦВМ, выход БЦВМ подсоединен к входу ПС-2, выход ПС-2 подключен к ИПНО и второму входу БК.
Такая пилотажно-навигационная система транспортного летательного аппарата характеризуется наличием членов экипажа для решения задач пилотирования.
Технический результат предлагаемого решения заключается в обеспечении беспилотного управления транспортным летательным аппаратом с применением двухканальной цифровой пилотажно-навигационной системы на основе инерциальных систем для повышения точности пилотирования и навигации, а также блока взлета-посадки для повышения безопасности полета летательного аппарата.
Данный технический результат достигается в пилотажно-навигационной системе транспортного летательного аппарата, содержащей инерциальные системы (ИС) для определения углов крена, тангажа, курса, инерциальных скоростей и координат местоположения, систему воздушных сигналов (СВС) для измерения воздушной скорости и барометрической высоты, аппаратуру для измерения относительной высоты посредством радиовысотомера (РВ), аппаратуру для определения путевой скорости и координат посредством инерциальных и радиосистем, блок коммутации (БК), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БК подключен к входу БИК через цифроаналоговый преобразователь (ЦАП), при этом в нее введена спутниковая навигационная система (СНС), блок программы маршрута (БПМ), блок взлета-посадки (БВП), выполнены первый и второй автоматические навигаторы (АН), при этом первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы (ИС-1) и первого канала блока взлета-посадки БВП, второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы (ИС-2) и второго канала блока взлета-посадки БВП, причем выход ИС-1 подключен к входу БЦВМ-1 и к первому входу БВП, а выход ИС-2 подключен к входу БЦВМ-2 и ко второму входу БВП, выходы СВС, РВ подключены к входам БЦВМ-1 и БЦВМ-2, один из выходов БПМ, СНС и ПП подключены к входам БЦВМ-1, другие выходы БПМ, СНС, ПП подключены к входам БЦВМ-2, выход БВП подключен к входам БЦВМ-1, БЦВМ-2, ПП, выход БЦВМ-1 подключен к первому входу БК, выход БЦВМ-2 подключен ко второму входу БК, выход БК подключен к входу цифроаналогового преобразователя ЦАП, выход ЦАП подключен к входу БИК, один из выходов каждой из БЦВМ-1 и БЦВМ-2 подключен к входу другой или БЦВМ-1, или БЦВМ-2. БЦВМ-1 и БЦВМ-2 соединены с ПП двухсторонней связью.
Посредством введения спутниковой навигационной системы, блока программы маршрута, блока взлета-посадки выполнения первого и второго автоматических навигаторов, выполнения первого АН в составе первой бортовой цифровой вычислительной машины, первой инерциальной системы и первого канала блока взлета-посадки, второго АН в составе второй бортовой цифровой вычислительной машины, второй инерциальной системы и второго канала блока взлета-посадки, обеспечивается пилотирование, навигация и безопасность взлета и посадки транспортного летательного аппарата без участия пилотов, что превращает транспортный летательный аппарат в вариант беспилотного летательного аппарата.
При выполнении первого и второго АН достигается повышение точности пилотажно-навигационной системы вследствие того, что используется спутниковая навигационная система СНС, а также инерциальные системы ИС-1, ИС-2, являющиеся при этом невозмущаемыми измерителями ускорений, обладающих высокой динамической точностью, а заодно являющиеся автономными датчиками - углов крена и тангажа, курса и составляющих скорости летательного аппарата, что обеспечивает возможность выбора между двумя АН того АН, который обеспечивает более оптимальную траекторию полета и осреднение параметров первого и второго АН, кроме того, указанные преимущества инерциальных систем в составе пилотажно-навигационной системы, а также использование блока взлета-посадки БВП для сравнения углов крена, тангажа, курса и составляющих скорости непосредственно от ИС-1, ИС-2 с выдачей сигнала о их соответствии допустимым величинам, значительно повышают безопасность взлета и посадки летательного аппарата.
На фиг. 1 представлена блок-схема цифровой пилотажно-навигационной системы беспилотного транспортного летательного аппарата.
Пилотажно-навигационная система беспилотного транспортного летательного аппарата (фиг. 1) содержит систему воздушных сигналов (СВС) 1, радиовысотомер (РВ) 10, блок исполнения команд (БИК) 2, блок коммутации (БК) 3, цифроаналоговый преобразователь (ЦАП) 12, приемник-передатчик (ПП) 4 системы радиосвязи с пультом управления на начальном пункте маршрута (НПМ) 5 и пультом управления на конечном пункте маршрута (КПМ) 6, блок программы маршрута (БПМ) 7, спутниковую навигационную систему (СНС) 8, блок взлета-посадки (БВП) 15, выполнены первый и второй автоматические навигаторы (АН). При этом первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1) 9, первой инерциальной системы (ИС-1) 11 и первого канала взлета-осадки, второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2) 13, второй инерциальной системы (ИС-2) 14 и второго канала блока взлета-посадки.
Выход ИС-1 11 подключен к одному из входов БЦВМ-1 9 и первому входу БВП 15, выход ИС-2 14 подключен к одному из входов БЦВМ-2 13 и второму входу БВП. Выходы СВС 1 и РВ 10 подключены к входам БЦВМ-1 9 и БЦВМ-2 13, один из выходов БПМ 7, СНС 8, ПП 4 подключены к входам БЦВМ-1 9, а другие выходы БПМ 7, СНС 8, ПП 4 подключены к входам БЦВМ-2, выход БВП 15 подключен к отдельным входам БЦВМ-1 9, БЦВМ-2 13 и ПП 4. Выход БЦВМ-1 9 подключен к одному из входов БК 3. Выход БЦВМ-2 13 подключен ко второму входу БК 3. Выход БК 3 подключен к входу ЦАП 12, выход ЦАП 12 подключен к входу БИК 2. Один из выходов каждой из БЦВМ-1 9 и БЦВМ-2 13 подключен к входу другой или БЦВМ-1 9, или БЦВМ-2 13. БЦВМ-1 9 и БЦВМ-2 13 соединены с ПП 4 двухсторонней связью. ПП 4 взаимодействует с помощью двухсторонней радиосвязи с наземными пультами НПМ 5, КПМ 6.
Пилотажно-навигационная система транспортного летательного аппарата работает следующим образом. При полете по маршруту запрограммированные в БПМ 7 в цифровом виде координаты начального и промежуточных точек маршрута, конечного и запасных аэродромов, заданных значений курсов, скоростей, высот полета, углов крена, тангажа на маршруте передаются в БЦВМ-1 9 и БЦВМ-2 13. Посредством аппаратуры, входящей в состав пилотажно-навигационной системы, измеряются следующие текущие параметры транспортного летательного аппарата: углы крена, тангажа, курса и инерциальных скоростей, определяемых инерциальными системами ИС-1 11 и ИС-2 14, воздушная скорость и барометрическая высота от системы воздушных сигналов СВС 1, высота полета от радиовысотомера РВ 10, координаты от спутниковой навигационной системы СНС 8. Данные параметры движения транспортного летательного аппарата передаются в БЦВМ-1 9 и БЦВМ-2 13, где происходит сравнение этих сигналов с заданными в БПМ 7 параметрами траектории движения транспортного летательного аппарата.
На основании этого БЦВМ-1 9 и БЦВМ-2 13 вырабатывают в цифровом виде дерективные сигналы отклонения транспортного летательного аппарата от заданного маршрута, которые преобразуются в директорные сигналы управления транспортным летательным аппаратом и поступают с выхода БЦВМ-1 9 на один из входов БК 3 и с выхода БЦВМ-2 13 на другой вход БК 3. Далее поступающий на один из входов БК 3 директорный сигнал поступает в цифроаналоговый преобразователь ЦАП 12, с выхода которого аналоговый сигнал подается в блок исполнения команд БИК 2, который приводит в действие рулевые тяги, закрылки и т.д. до тех пор, пока не будет обнулен директорный сигнал. Обнуление директорного сигнала означает, что транспортный летательный аппарат вышел на заданную траекторию полета. Выбор одного из двух АН, по директорному сигналу которого должна осуществляться работа БИК 2, определяется указанием ПП 4 от пульта управления НПМ 5 на начальном пункте маршрута или пульта управления КПМ 6 на конечном пункте маршрута.
БЦВМ-1 9 и БЦВМ-2 13 осуществляют межмашинный обмен информацией, в том числе для осреднения вычислений, контроля работоспособности каждого АН на основании их средств встроенного контроля на предмет отключения отказавшего АН. При превышении допустимых расхождений в вычисленных управляющих сигналах первого и второго АН БЦВМ-1 9 и БЦВМ-2 13 передают в ПП 4 соответствующий сигнал, который транслируется далее на пульт управления НПМ 5 на начальном пункте маршрута и на пульт управления КПМ 6 на конечном пункте маршрута. На основании этого наземные службы принимают решение, каким образом осуществлять полет транспортного летательного аппарата.
Блок БВП 15 принимает текущие значения углов крена, тангажа, курса и составляющих скорости непосредственно от ИС-1 11 и ИС-2 14, разница сравниваемых величин параметров не должна превышать допустимых порогов, запрограммированных в блоке БВП 15, в случае их превышения БВП 15 выдает сигнал превышения допустимого рассогласования в БЦВМ-1 9 и БЦВМ-2 13 для учета и в ПП 4 для принятия решения наземными службами.
Источники информации
1. А.А. Лоскутников, Н.В. Сенюшкин, В.В. Парамонов. Системы автоматического управления БПЛА. «Молодой ученый». Издательство «Молодой ученый». №9, 2011 г., с. 56-58.
2. Патент №145174 РФ «Пилотажно-навигационная система транспортного летательного аппарата», МПК G01C 23/00 (2006.01), 2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажно-навигационная система транспортного летательного аппарата | 2017 |
|
RU2685572C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |

Изобретение относится к области пилотажно-навигационных систем транспортного летательного аппарата. Цифровая пилотажно-навигационная система транспортно-летательного аппарата, содержащая аппаратуру текущих пилотажных навигационных параметров для измерения курса, углов крена, тангажа, инерциальных скоростей (ИС-1), (ИС-2), воздушной скорости, барометрической высоты (СВС), относительной высоты от радиовысотомера (РВ), для определения координат посредством инерциальных радиосистем, блок коммутации (БК), цифро-аналоговый преобразователь (ЦАП), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), также дополнительно включает спутниковую навигационную систему (СНС), блок программы маршрута (БПМ), блок взлета-посадки (БВП), выполнен первый и второй автоматические навигаторы (АН). Технический результат - обеспечение беспилотного управления транспортным летательным аппаратом в купе с повышением точности пилотажно-навигационной системы летательного аппарата и безопасности его пилотирования. 1 ил.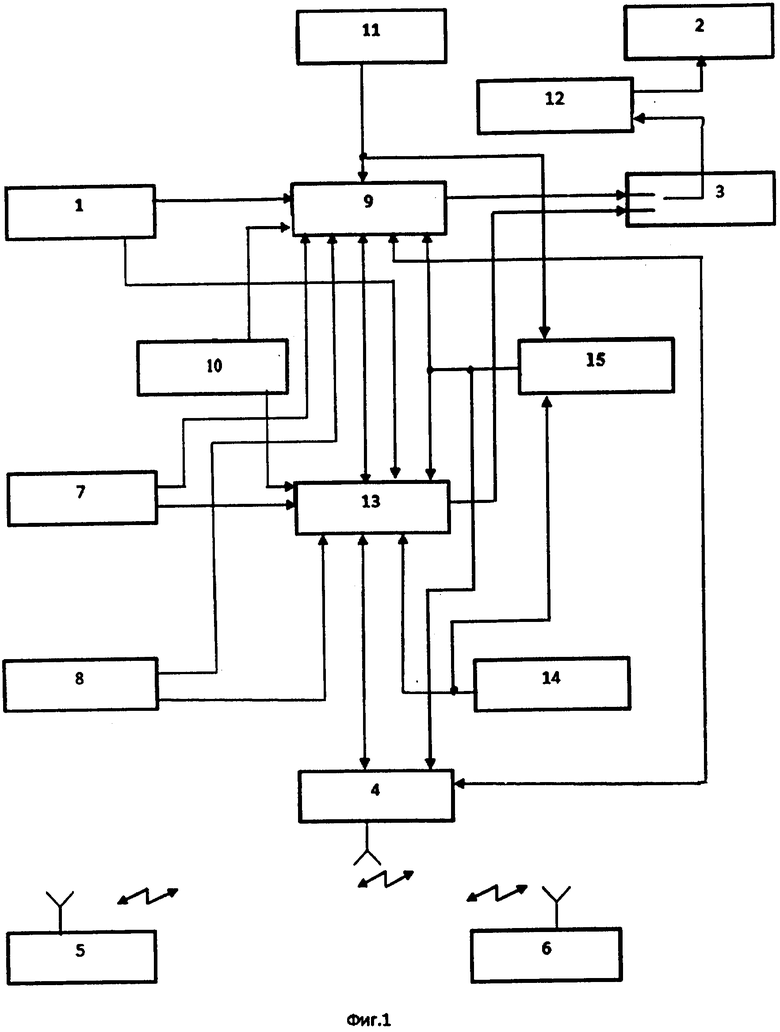
Пилотажно-навигационная система транспортного летательного аппарата, содержащая цифровую аппаратуру текущих пилотажно-навигационных параметров для измерения курса, углов крена, тангажа, инерциальных скоростей (ИС-1), (ИС-2), воздушной скорости, барометрической высоты (СВС), относительной высоты от радиовысотомера (РВ), для определения координат посредством инерциальных и радио систем, блок коммутации (БК), цифроаналоговый преобразователь (ЦАП), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БК подключен к входу ЦАП, выход которого подключен ко входу БИК, отличающаяся тем, что с целью обеспечения беспилотного управления транспортным летательным аппаратом, повышения точности пилотажно-навигационной системы и повышения безопасности пилотирования летательным аппаратом, в нее введены спутниковая навигационная система (СНС), блок программы маршрута (БПМ), блок взлета посадки (БВП), выполнены первый и второй автоматические навигаторы (АН), при этом первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы ИС-1 и первого канала блока взлета-посадки, второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы ИС-2 и второго канала блока взлета-посадки, выходы СВС, РВ подключены к входам БЦВМ-1, БЦВМ-2, выход ИС-1 подключен к БЦВМ-1 и к первому входу БВП, а одни из выходов БПМ, СНС и ПП подключены к входам БЦВМ-1, выход ИС-2 подключен к БЦВМ-2 и ко второму входу БВП, а другие выходы БМП, СНС и ПП подключены к входам БЦВМ-2, выход БВП подключен к входам БЦВМ-1, БЦВМ-2, ПП, БЦВМ-1 подключен к первому входу БК, выход БЦВМ-2 подключен ко второму входу БК, один из выходов каждой из БЦВМ-1 и БЦВМ-2 подключен к входу другой или БЦВМ-1, или БЦВМ-2. БЦВМ-1 и БЦВМ-2 соединены с ПП двухсторонней связью.
| 0 |
|
SU151304A1 |

