Изобретение относится к области приборостроения, а именно, к пилотажно-навигационному оборудованию транспортных беспилотных летательных аппаратов, самолетов и вертолетов, предназначенных для служб МЧС, лесопромышленного комплекса и в качестве дублирующего средства для пилотируемых летательных аппаратов в случае отсутствия средств радиокоррекции [1].
Известна пилотажно-навигационная система транспортного летательного аппарата [2], содержащая предназначенную для выполнения функций двух пилотов аппаратуру текущих пилотажно-навигационных параметров (АТПН) для измерения курса, углов крена и тангажа, воздушной скорости, барометрической высоты, высоты посредством радиовысотомера, для определения координат посредством радиосистем, индикатор пилотажно-навигационной обстановки (ИПНО) и блок формирования команд (БФК) в кабине экипажа, блок коммутации (БК), блок исполнения команд (БИК), систему радиосвязи с приёмником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причём выход БК подключен к входу БИК, при этом в ней в качестве исполнителя функций второго пилота выполнен автоматический навигатор в составе курсовой системы (КС), спутниковой навигационной системы (СНС), блока программы маршрута (БПМ), бортовой цифровой вычислительной машины (БЦВМ), первого преобразователя сигналов (ПС-1), второго преобразователя сигналов (ПС-2), причём выход БФК подключен к одному из входов БК, выходы устройств АТПН подключены к входам ПС-1, выходы ПС-1, БПМ, СНС, КС, ПП подключены к входам БЦВМ, выход БЦВМ подсоединён к входу ПС-2, выход ПС-2 подключен к ИПНО и второму входу БК.
Такая пилотажно-навигационная система транспортного летательного аппарата характеризуется наличием членов экипажа для решения задач пилотирования.
Наиболее близкой по технической сущности является пилотажно-навигационная система транспортного летательного аппарата [3], содержащая цифровую аппаратуру текущих пилотажно–навигационных параметров для измерения курса, углов крена, тангажа, инерциальных скоростей (ИС-1), (ИС-2), воздушной скорости, барометрической высоты (СВС), относительной высоты от радиовысотомера (РВ), для определения координат посредством инерциальных и радио систем, блок коммутации (БК), цифро-аналоговый преобразователь (ЦАП), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БК подключен к входу ЦАП, выход которого подключен ко входу БИК, при этом в нее введены спутниковая навигационная система (СНС), блок программы маршрута (БПМ), блок взлета посадки (БВП), выполнены первый и второй автоматические навигаторы (АН), при этом первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы ИС-1 и первого канала блока взлета-посадки БВП, второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы ИС-2 и второго канала блока взлета-посадки БВП, выходы СВС, РВ подключены к входам БЦВМ-1, БЦВМ-2, выход ИС-1 подключен к БЦВМ-1 и к первому входу БВП, а одни из выходов БПМ, СНС и ПП подключены к входам БЦВМ-1, выход ИС-2 подключен к БЦВМ-2 и ко второму входу БВП, а другие выходы БМП, СНС и ПП подключены к входам БЦВМ-2, выход БВП подключен к входам БЦВМ-1, БЦВМ-2, ПП: БЦВМ-1 подключен к первому входу БК, выход БЦВМ-2 подключен ко второму входу БК, один из выходов каждой из БЦВМ-1 и БЦВМ-2 подключен к входу другой или БЦВМ-1, или БЦВМ-2. БЦВМ-1 и БЦВМ-2 соединены с ПП двухсторонней связью.
Такая цифровая пилотажно-навигационная система характеризуется необходимостью иметь в ее двухканальном составе инерциальные системы и
приемник спутниковой навигационной системы для коррекции полета летательного аппарата по заданному маршруту с гарантией автоматической безопасной посадки тяжелого транспортного летательного аппарата на конечной точке маршрута, при этом такая пилотажно-навигационная система имеет значительную массу и стоимость приборного оборудования.
Технический результат предлагаемого решения заключается в обеспечении беспилотного управления транспортным летательным аппаратом с применением одноканальной цифровой пилотажно-навигационной системы на основе использования стабилизированного в пространстве гироскопического датчика курса для повышения точности и автономности навигации, снижения массы и стоимости приборного оборудования, повышения безопасности полета летательного аппарата в зону работы пульта управления на конечном пункте маршрута.
Данный технический результат достигается в пилотажно-навигационной системе транспортного летательного аппарата, содержащей цифровую аппаратуру текущих пилотажно-навигационных параметров для определения авиагоризонта, измерения воздушной скорости, барометрической высоты, относительной высоты от радиовысотомера (АТП), аппаратуру измерения курса на основе гироскопического датчика и бортовую цифровую вычислительную машину (БЦВМ) для вычисления координат курсо-воздушного счисления, осуществления пилотирования и навигации, блок переключения каналов (БПК), блок исполнения команд (БИК), систему управления летательным аппаратом (ЛА), блок приема-передачи команд (ППК), пульт управления на начальном (НПК) и пульт управления на конечном (КПМ) пункте маршрута, блок сброса груза (БСГ), узел сброса груза (УСГ), при этом выход БПК подключен к входу БИК, выход БИК подключен к системе управления летательного аппарата ЛА, выход БЦВМ подключен к первому входу БПК и к входу ППК, первый выход ППК подключен к первому входу БЦВМ, второй выход ППК подключен ко второму входу БПК, третий выход ППК подключен к третьему входу БПК и к входу БСГ, блок ППК и пульт управления НПМ, блок ППК и пульт управления КПМ соединены между собой двухсторонней радиосвязью, при этом в нее введен гироскоп направления (ГН), введен съемный блок выставки начального стояночного курса (БВК),блок
задатчика курса/задатчика магнитного склонения (ЗК/ЗМС), блок коррекции курса (БКК), блок пилотажно-навигационных данных (БПД), при том, что конструкция блока БВК механически жестко подключается с помощью реперных штырей БВК к реперным отверстиям летательного аппарата, выход БВК подключен к входу блока ЗК/ЗМС, выход которого подключен к первому входу ГН, выход БКК подключен ко второму входу ГН, выход ГН подключен ко второму входу БЦВМ, выход БПД подключен к третьему входу БЦВМ, выход АТП подключен к четвертому входу БЦВМ.
Посредством введения гироскопа направления, блока выставки начального стояночного курса, блока задатчика курса/задатчика магнитного склонения, блока коррекции курса, блока пилотажно-навигационных данных, совместно с аппаратурой текущих пилотажно-навигационных параметров, обеспечивается пилотирование, автономная навигация и безопасность полета транспортного летательного аппарата на маршруте в зону работы пульта управления на конечном пункте маршрута без участия пилотов-операторов, что превращает транспортный летательный аппарат в вариант автономного беспилотного летательного аппарата.
Наличие съемного (не используемого в полете) блока выставки начального стояночного курса, отдельного гироскопа направления, введение широтной коррекции скорости вращения Земли в зоне полета и компенсация собственного дрейфа гироскопа от блока коррекции курса, введение координат начального и конечного пункта маршрута, заданных значений курса, высоты, скорости и угла сноса от блока пилотажно-навигационных данных обеспечит пилотирование и навигацию летательного аппарата в зону работы пульта управления на конечном пункте маршрута, при этом позволит значительно снизить массу и стоимость приборного оборудования, повысить безопасность полета транспортного летательного аппарата.
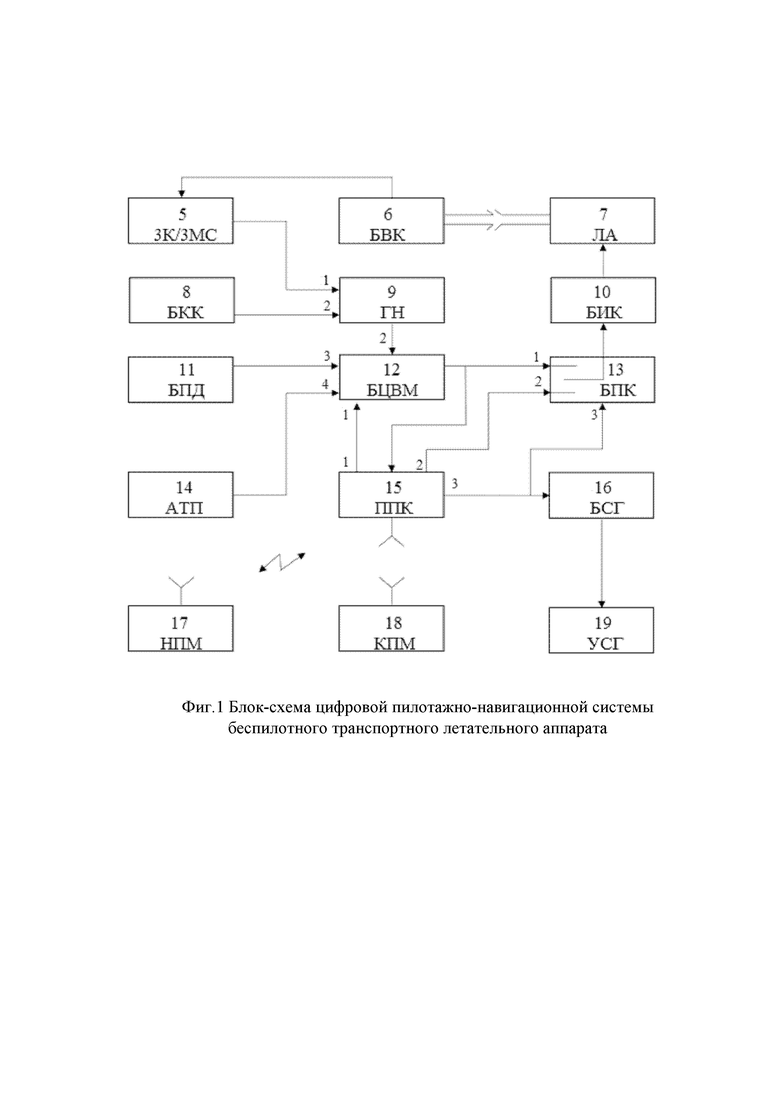
На фиг. 1 показана блок-схема цифровой пилотажно-навигационной системы беспилотного летательного аппарата, на фиг. 2 – параметры курса летательного аппарата в точке старта, на фиг. 3 – эскиз карты полёта летательного аппарата с выдерживанием заданного курса.
Условные обозначения к фиг.2, фиг.3:
 – стояночный курс,
– стояночный курс,  – стояночный магнитный курс,
– стояночный магнитный курс,  – магнитное склонение,
– магнитное склонение,  – заданный курс,
– заданный курс,  – текущий курс,
– текущий курс,  – вычисляемый курсовой угол доворота на КПМ,
– вычисляемый курсовой угол доворота на КПМ,  – азимут на топографический знак Т,
– азимут на топографический знак Т,  – угол сноса, V – вектор скорости, по – продольная ось; D1, D2 – дальность; λ, φ – географические долгота и широта, А1 – координаты в автономном полёте, параметры курсо-воздушной навигации –
– угол сноса, V – вектор скорости, по – продольная ось; D1, D2 – дальность; λ, φ – географические долгота и широта, А1 – координаты в автономном полёте, параметры курсо-воздушной навигации –
Пилотажно-навигационная система транспортного летательного аппарата (фиг.1), содержит систему подключения входных и выходных сигналов 1, 2, 3, 4, блок задатчика курса/задатчика магнитного склонения (ЗК/ЗМС) 5, съемный блок выставки начального стояночного курса (БВК) 6, систему управления летательного аппарата (ЛА) 7, блок коррекции курса (БКК) 8, гироскоп направления (ГН) 9, блок исполнения команд (БИК) 10, блок пилотажно-навигационных данных (БПД) 11, аппаратуру измерения курса на основе гироскопического датчика и бортовую цифровую вычислительную машину (БЦВМ) 12 для вычисления координат курсо-воздушного счисления, осуществления пилотирования и навигации, блок переключения каналов (БПК) 13, цифровую аппаратуру текущих пилотажно–навигационных параметров для определения авиагоризонта, измерения воздушной скорости, барометрической высоты, относительной высоты от радиовысотомера (АТП) 14, блок приема-передачи команд (ППК) 15, блок сброса груза (БСГ) 16, пульт управления на начальном (НПМ) 17, пульт управления на конечном (КПМ) 18 пункте маршрута, узел сброса груза (УСГ) 19.
При этом выход БПК 13 подключен ко входу БИК 10, выход БИК 10 подключен к системе управления летательного аппарата ЛА 7, выход БЦВМ 12 подключен к первому входу БПК 13 и к входу ППК 15, первый выход ППК 15 подключен к первому входу БЦВМ 12, второй выход ППК 15 подключен ко второму входу БПК 13, третий выход ППК 15 подключен к третьему входу БПК 13 и к входу БСГ 16, выход БСГ 16 подключен к входу УСГ 19, блок ППК 15 и пульт управления НПМ 17, блок ППК 15 и пульт управления КПМ 19 соединены между собой двухсторонней радиосвязью, конструкция блока БВК 6 механически жестко подключается с помощью реперных штырей БВК 6 к реперным
отверстиям летательного аппарата ЛА 7, выход БВК 6 подключен ко входу блока ЗК/ЗМС 5, выход которого подключен к первому входу ГН 9, выход БКК 8 подключен ко второму входу ГН 9, выход ГН 9 подключен ко второму входу БЦВМ 12, выход БПД 11 подключен к третьему входу БЦВМ 12, выход АТП 14 подключен к четвертому входу БЦВМ 12.
При подготовке к полету БВК 6 устанавливается с помощью реперных штырей на реперные отверстия ЛА 7, обеспечивая при этом совмещение продольных осей БВК 6 и ЛА 7. Конструктивно обеспечивается также совмещение нулевого значения угла датчика курса, устанавливаемого на БВК 6, и нулевого значения продольной оси БВК 6.
В качестве датчика стояночного курса могут использоваться – магнитный компас, буссоль или оптический, использующий ориентир Т, пеленгатор со шкалой курса или датчиком курса с цифровым или аналоговым (СКТ) выходом.
Пилотажно-навигационная система транспортного летательного аппарата работает следующим образом. На старте измеренное БВК 6 значение начального стояночного магнитного курса летательного аппарата - (например, показание шкалы магнитного компаса) вводится в блок ЗК/ЗМС 5, где с учетом магнитного склонения – формируется сигнал начального стояночного курса –  , после чего при известном значении заданного курса на–
, после чего при известном значении заданного курса на– вычисляется курсовой угол доворота летательного аппарата
вычисляется курсовой угол доворота летательного аппарата  на заданный курс
на заданный курс  вводится с выхода ЗК/ЗМС 5 на первый вход ГН 9, т.е.
вводится с выхода ЗК/ЗМС 5 на первый вход ГН 9, т.е.  (Фиг.2), а затем с выхода ГН 9 поступает на второй вход БЦВМ 12. БВК 6 снимается с летательного аппарата.
(Фиг.2), а затем с выхода ГН 9 поступает на второй вход БЦВМ 12. БВК 6 снимается с летательного аппарата.
На второй вход ГН 9 с выхода БКК 8 вводится сигнал широтной коррекции скорости вращения Земли - 
 , обеспечивающие стабильность показаний значений курса от ГН 9.
, обеспечивающие стабильность показаний значений курса от ГН 9.
Запрограммированные в цифровом виде координаты начального и конечного пунктов маршрута (

В полете посредством аппаратуры текущих пилотажно-навигационных параметров АТП 14 измеряются текущие параметры транспортного летательного аппарата: углы отклонения от авиагоризонта, воздушной скорости, барометрической высоты, высоты полета от радиовысотомера, угол сноса и с выхода АТП 14 вводятся на четвертый вход БЦВМ 12. В БЦВМ 12 происходит сравнение этих сигналов с заданными в БПД 11 параметрами транспортного летательного аппарата и сравнения значений  и , со списанием сигнала до нулевого значения.
и , со списанием сигнала до нулевого значения.
На основании этого БЦВМ 12 вырабатывает в цифровом виде директивные сигналы отклонений текущих значений параметров транспортного летательного аппарата от заданных значений, которые преобразуются в директорные сигналы управления транспортным летательным аппаратом и вводятся с выхода БЦВМ 12 на первый вход блока БПК 13, с выхода БПК 13 данный директорный сигнал в цифровом виде поступает на вход БИК 10, который формирует сигналы управления и выхода БИК 10 вводятся в цифровую исполнительную систему управления ЛА 7 – рулевыми тягами, закрылками, и т.д. до тех пор, пока не будет обнулен директорный сигнал, в т.ч.  . Обнуление директорного сигнала означает, что транспортный летательный аппарат вышел на траекторию полета по заданному курсу -
. Обнуление директорного сигнала означает, что транспортный летательный аппарат вышел на траекторию полета по заданному курсу -  . Из-за отклонения транспортного летательного аппарата от запрограммированного полета по заданному курсу -
. Из-за отклонения транспортного летательного аппарата от запрограммированного полета по заданному курсу -  на вычисленное значение заданного курса -
на вычисленное значение заданного курса - 
В зоне работы пультов управления НПМ 17 и КПМ 18, команда на переход управления по каналам радиосвязи передается с пультов НПМ 17 или КПМ 18 на вход ППК 15, с выхода 1 ППК 15 данная команда поступает на вход 1 БЦВМ 12 и с выхода 3 ППК 15 на вход 3 БПК 13, при этом БПК 13 переключает управление с выхода БЦВМ 12 поступающего на вход 1 БПК 13 на вход 2 БПК 13, поступающего с выхода 2 ППК 15, одновременно с выхода БЦВМ 12 на вход
ППК15 поступают сигналы управления и координаты автономно вычисленные при полете на маршруте. После чего команды управления от пультов НПМ 17 или КПМ 18 поступают по каналу радиосвязи на ППК 15 и с выхода 2 ППК 15 через вход 2 БПК 13 и далее с выхода БПК 13 на вход БИК 10 и с выхода БИК 10 на систему управления транспортным летательным аппаратом ЛА 7 для выполнения полета и посадки в точке КПМ, при этом сигнал сброса груза поступает с выхода 3 ППК 15 на вход БСГ 16, а с выхода БСГ 16 на вход исполнительного устройства УСГ 19.
Предлагаемое техническое решение обеспечивает беспилотное управление транспортным летательным аппаратом, повышение точности и автономности навигации, повышение безопасности полета летательного аппарата.
Источники информации
1. Скуднева О.В. Обеспечение безопасности полетов в условиях чрезвычайных ситуаций с помощью использования транспортных беспилотных летательных аппаратов.// Инновации в современной науке (том.2). Материалы научно-практической конференции 28 ноября 2017 года. Г. Прага, Чехия.
2. Патент РФ №145174 на полезную модель «Пилотажно-навигационная система транспортного летательного аппарата», 2014.
3. Патент РФ №2597814 С1 на изобретение «Пилотажно-навигационная система транспортного летательного аппарата», 2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2017 |
|
RU2685572C2 |
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| Способ отвода лесосек | 2017 |
|
RU2663280C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |


Изобретение относится к области пилотажно-навигационных систем транспортного летательного аппарата. Цифровая пилотажно-навигационная система транспортного летательного аппарата содержит аппаратуру текущих пилотажно–навигационных параметров (АТП) для определения авиагоризонта, измерения воздушной скорости, барометрической высоты, относительной высоты от радиовысотомера, аппаратуру измерения курса на основе гироскопического датчика и бортовую цифровую вычислительную машину (БЦВМ) для вычисления координат курсовоздушного счисления и осуществления пилотирования и навигации, блок переключения каналов (БПК), блок исполнения команд (БИК), систему управления летательным аппаратом (ЛА), систему двухсторонней радиосвязи приемника-передатчика команд (ППК) с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ). Цифровая пилотажно-навигационная система транспортного летательного аппарата дополнительно включает гироскоп направления (ГН), съемный блок выставки начального стояночного курса (БВК), задатчик курса / задатчик магнитного склонения (ЗК/ЗМС), блок коррекции курса (БКК), блок пилотажно-навигационных данных (БПД), блок сброса груза (БСГ), узел сброса груза (УСГ). Технический результат – обеспечение беспилотного управления транспортным летательным аппаратом, повышение точности и автономности пилотажно-навигационной системы летательного аппарата и безопасности его пилотирования. 3 ил.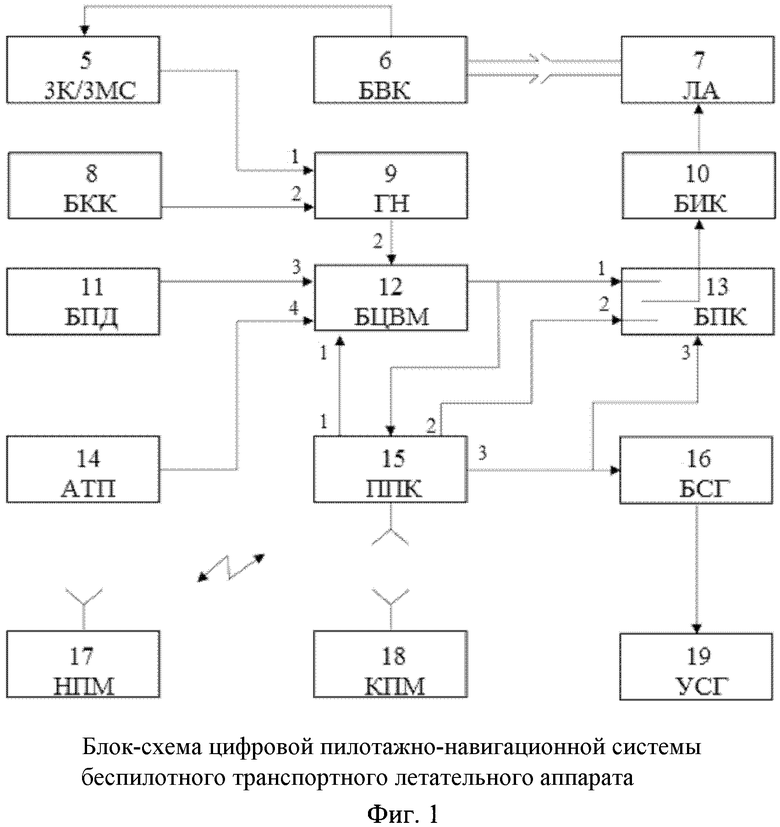
Пилотажно-навигационная система транспортного летательного аппарата, содержащая цифровую аппаратуру текущих пилотажно–навигационных параметров для определения авиагоризонта, измерения воздушной скорости, барометрической высоты, относительной высоты от радиовысотомера (АТП), аппаратуру измерения курса на основе гироскопического датчика и бортовую цифровую вычислительную машину (БЦВМ) для вычисления координат курсовоздушного счисления, осуществления пилотирования и навигации, блок переключения каналов (БПК), блок исполнения команд (БИК), систему управления летательным аппаратом (ЛА), блок приема-передачи команд (ППК), пульт управления на начальном (НПМ) и пульт управления на конечном (КПМ) пунктах маршрута, блок сброса груза (БСГ), узел сброса груза (УСГ), при этом выход БПК подключен к входу БИК, выход БИК подключен к системе управления летательного аппарата ЛА, выход БЦВМ подключен к первому входу БПК и к входу ППК, первый выход ППК подключен к первому входу БЦВМ, второй выход ППК подключен ко второму входу БПК, третий выход ППК подключен к третьему входу БПК и к входу БСГ, выход БСГ подключен к входу УСГ, блок ППК и пульт управления НПМ, блок ППК и пульт управления КПМ соединены между собой двухсторонней радиосвязью, отличающаяся тем, что в нее введен гироскоп направления ГН, введен съемный блок выставки начального стояночного курса (БВК), блок задатчика курса/задатчика магнитного склонения (ЗК/ЗМС), блок коррекции курса (БКК), блок пилотажно-навигационных данных (БПД), притом что конструкция блока БВК механически жестко подключается с помощью реперных штырей БВК к реперным отверстиям летательного аппарата ЛА, выход БВК подключен к входу блока ЗК/ЗМС, выход которого подключен к первому входу ГН, выход БКК подключен ко второму входу ГН, выход ГН подключен ко второму входу БЦВМ, выход БПД подключен к третьему входу БЦВМ, выход АТП подключен к четвертому входу БЦВМ.
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| 0 |
|
SU151304A1 | |
| Вибрационный питатель к погрузочной машине | 1961 |
|
SU145174A1 |
| US 9310221 B1, 12.04.2016. | |||

