Изобретение относится к области приборостроения, а именно к пилотажно-навигационному оборудованию транспортных самолетов, вертолетов и беспилотных летательных аппаратов и может быть использовано при решении задач навигации, пилотирования, автоматичнской посадки и определения координат места аварийной посадки транспортного беспилотного и пилотируемого летательного аппарата.
Известна пилотажно-навигационная система транспортного летательного аппарата [1], содержащая предназначенную для выполнения функций двух пилотов аппаратуру текущих пилотажно-навигационных параметров (АТПН) для измерения курса, углов крена и тангажа, воздушной скорости, барометрической высоты, высоты посредством радиовысотомера, для определения координат посредством радиосистем, индикатор пилотажно-навигационной обстановки (ИПНО) и блок формирования команд (БФК) в кабине экипажа, блок коммутации (БК), блок исполнения команд (БИК), систему радиосвязи с приёмником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причём выход БК подключен к входу БИК, при этом в ней в качестве исполнителя функций второго пилота выполнен автоматический навигатор в составе курсовой системы (КС), спутниковой навигационной системы (СНС), блока программы маршрута (БПМ), бортовой цифровой вычислительной машины (БЦВМ), первого преобразователя сигналов (ПС-1), второго преобразователя сигналов (ПС-2), причём выход БФК подключен к одному из входов БК, выходы устройств АТПН подключены к входам ПС-1, выходы ПС-1, БПМ, СНС, КС, ПП подключены к входам БЦВМ, выход БЦВМ подсоединён к входу ПС-2, выход ПС-2 подключен к ИПНО и второму входу БК.
Такая пилотажно-навигационная система транспортного летательного аппарата характеризуется наличием членов экипажа для решения задач пилотирования. При том, что она может быть полезна на пилотируемых летательных аппаратах (ЛА) для повышения безопасности посадки в критических условиях эксплуатации. В случае аварийной посадки зона поиска и координаты местонахождения ЛА могут быть определены по показаниям пилота или при визуальном наблюдении по фото и теле изображениям с пилотируемого поискового ЛА в условиях дневной видимости.
Известна пилотажно-навигационная система транспортного летательного аппарата [2], содержащая автоматический навигатор (АН), включающий в себя гироскоп направления (ГН), бортовую цифровую вычислительную машину (БЦВМ), систему воздушных сигналов (СВС), радиовысотомер (РВ), блок коррекции курса (БКК), блок задатчика курса / задатчика магнитного склонения (ЗК/ЗМС), блок выставки начального стояночного курса (БВК), блок программирования маршрута (БПМ), датчик авиагоризонта (ДАГ), содержащая систему исполнения команд ,включающую блок переключения каналов (БПК), блок исполнения команд (БИК), блок системы управления летательным аппаратом (ЛА), блок приёмника-передатчика команд (ППК) для радиосвязи с пультом управления на начальном пункте маршрута (ПУ НПМ) и пультом управления на конечном пункте маршрута (ПУ КПМ), при этом выход БПК подключён к входу БИК, выход которого подключён к входу системы управления летательного аппарата (ЛА), съёмная конструкция блока БВК механически жёстко подключается с помощью реперных штырей к реперным отверстиям ЛА, выход БВК подключён к входу блока ЗК/ЗМС, выход которого подключён к первому входу ГН , выход БКК подключён ко второму входу ГН , выход ГН, выход СВС , выход РВ , выход БПМ , выход ДАГ подключены к отдельным входам БЦВМ, первый выход БЦВМ подключён ко первому входу БПК, первый выход ППК подключён ко второму входу БПК, второй выход ППК подключён к третьему входу БПК и к отдельному входу БЦВМ, блок ППК связан двухсторонней связью с БЦВМ и двухсторонней радиосвязью с пультом управления на начальном пункте маршрута ПУ НПМ и пультом управления на конечном пункте маршрута ПУ КПМ, содержащая систему радиокоррекции траекторий полёта на маршруте и при автоматической посадке, включающую в себя приёмник спутниковой навигационной системы (СНС), приёмник радиодальномерной системы (РДС), работающий от трёх и более наземных радиодальномерных систем, блок коррекции траектории на маршруте (БКТ), блок коррекции траектории на посадке (БКП), блок математического программирования глиссады (БПГ), при этом выход СНС подключён к первому входу БКТ, выход РДС подключён ко второму входу БКТ, второй выход БЦВМ подключен к третьему входу БКТ и первому входу БКП, первый выход БКТ подключён к отдельному входу БЦВМ, выход БКП подключён к отдельному входу БЦВМ, второй выход БКТ подключён ко второму входу БКП, третий выход БЦВМ подключён к входу БКК, блок БПГ связан с БКП двухсторонней связью.
Недостатком такой пилотажно-навигационной системы, в случае аварийной посадки транспортного БПЛА, является отсутствие возможности поиска местоположения зоны аварийной посадки и координат аварийной посадки, кроме принятого в эксплуатации визуального поиска с поискового ЛА, проводимого в дневных условиях видимости.
Задачей и результатом предлагаемого изобретения является создание пилотажно-навигационной системы, которая в условиях аварийной посадки должна определять и сохранять координаты местоположния аварийной посадки транспортного БПЛА и передать их в радиоаппаратуру поиска аппарата.
Технический результат совпадает задачей изобретения. Данный технический результат достигается в пилотажно-навигационной системе транспортного летательного аппарата, содержащей автоматический навигатор (АН), включающий в себя гироскоп направления (ГН), бортовую цифровую вычислительную машину (БЦВМ), систему воздушных сигналов (СВС), радиовысотомер (РВ), блок коррекции курса (БКК), блок задатчика курса / задатчика магнитного склонения (ЗК/ЗМС), блок выставки начального стояночного курса (БВК), блок программирования маршрута (БПМ), датчик авиагоризонта (ДАГ), содержащей систему исполнения команд, включающую блок переключения каналов (БПК), блок исполнения команд (БИК), блок системы управления летательным аппаратом (ЛА), блок приёмника-передатчика команд (ППК) для радиосвязи с пультом управления на начальном пункте маршрута (ПУ НПМ) и пультом управления на конечном пункте маршрута (ПУ КПМ), при этом выход БПК подключён к входу БИК, выход которого подключён к входу системы управления летательного аппарата (ЛА), съёмная конструкция блока БВК механически жёстко подключается с помощью реперных штырей к реперным отверстиям ЛА, выход БВК подключён к входу блока ЗК/ЗМС, выход которого подключён к первому входу ГН , выход БКК подключён ко второму входу ГН , выход ГН, выход СВС , выход РВ , выход БПМ , выход ДАГ подключены к отдельным входам БЦВМ, первый выход БЦВМ подключён ко первому входу БПК, первый выход ППК подключён ко второму входу БПК, второй выход ППК подключён к третьему входу БПК и к отдельному входу БЦВМ, блок ППК связан двухсторонней связью с БЦВМ и двухсторонней радиосвязью с пультом управления на начальном пункте маршрута ПУ НПМ и пультом управления на конечном пункте маршрута ПУ КПМ, содержащей систему радиокоррекции траекторий полёта на маршруте и при автоматической посадке (СРТ) , включающей в себя приёмник спутниковой навигационной системы (СНС), приёмник радиодальномерной системы (РДС), работающий от трёх и более наземных радиодальномерных систем, блок коррекции траектории на маршруте (БКТ), блок коррекции траектории на посадке (БКП), блок математического программирования глиссады (БПГ), при этом выход СНС подключён к первому входу БКТ, выход РДС подключён ко второму входу БКТ, второй выход БЦВМ подключен к третьему входу БКТ и первому входу БКП, первый выход БКТ подключён к отдельному входу БЦВМ, выход БКП подключён к отдельному входу БЦВМ, второй выход БКТ подключён ко второму входу БКП, третий выход БЦВМ подключён к входу БКК, блок БПГ связан с БКП двухсторонней связью, при этом в неё дополнительно введена система поиска аппарата (СПА), вкючающая в себя блок аварийной посадки БАП и радиоаппарату поиска аппарата РПА, при этом первый выход БЦВМ подключён к входу БАП, а блок БАП взаимодейстует с РПА и ППК двухсторонней радиосвязью.
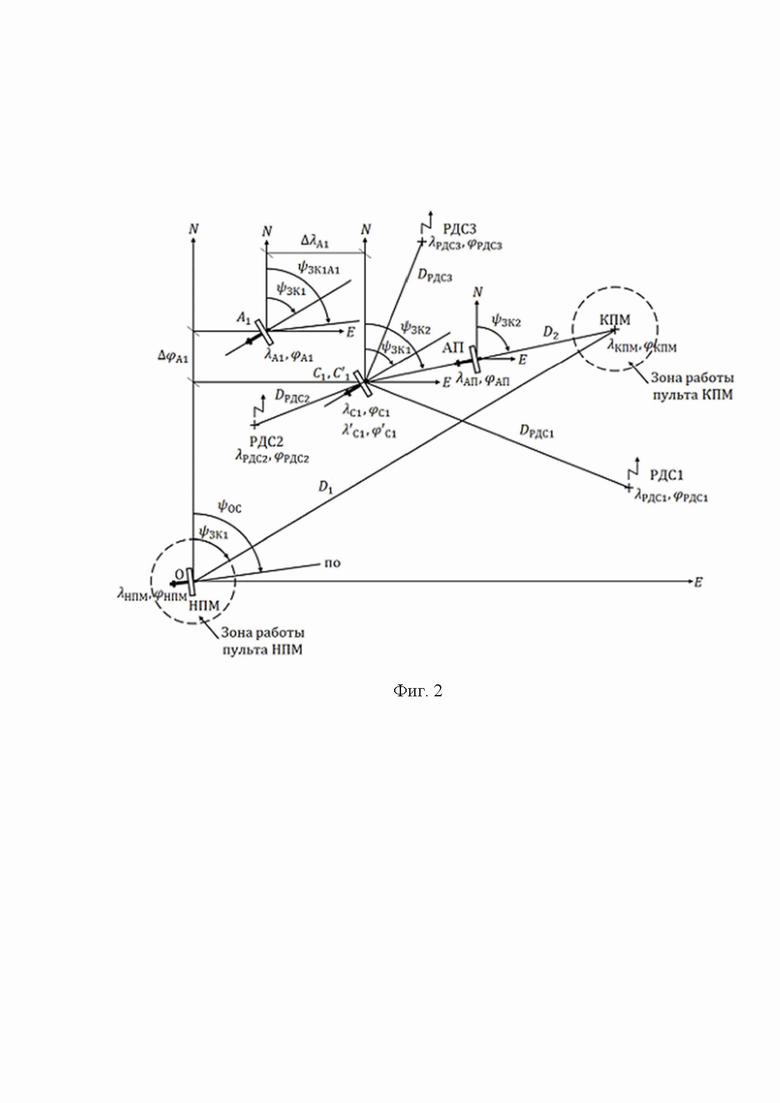
На фиг. 1 представлена блок-схема цифровой пилотажно-навигационной системы транспортного летательного аппарата.
Перечень позиций блоков, приведённых на фиг. 1, фиг. 2 - их смысловые значения, используемые в тексте данного описания:
1 (СВС) - Система воздушных сигналов.
2 (БИК) - Блок исполнения команд,
3 (БПК) - Блок переключения каналов,
4 (ППК) - Блок приёмника-передатчика команд,
5 (ПУ НПМ) - Пульт управления на начальном пункте маршрута,
6 (ПУ КПМ) - Пульт управления на конечном пункте маршрута,
7 (БПМ) - Блок программирования маршрута,
8 (СНС) - Приёмник Спутниковой Навигационной системы,
9 (ГН) -Гироскоп направления,
10 (РВ) - Радиовысотомер,
11 (ЛА) -Блок системы управления полётом летательного аппарата,
12 (ЗК/ЗМС) - Блок зедатчика курса/задатчика магнитного склонения,
13 (БЦВМ) - Бортовая цифровая вычислительная машина.
14 (БВК) - Блок выставки начального стояночного курса,
15 (БКК) - Блок коррекции курса,
16 (БКТ) - Блок коррекции траектории на маршруте,
17 (РДС) - Приёмник радиодальномерной системы,
18 (БКП) - Блок коррекции траектории на посадке,
19 (БПГ) -Блок математического программирования глиссады,
20 (ДАГ) - Датчик авиагоризонта,
21 (БАП) - Блок аварийной посадки,
22 (РПА) - Радиоаппаратура поиска аппарата.
Пилотажно-навигационная система транспортного летательного аппарата содержит автоматический навигатор (АН), включающий в себя гироскоп направления 9 (ГН), бортовую цифровую вычислительную машину 13 (БЦВМ), систему воздушных сигналов 1 (СВС), радиовысотомер 10 (РВ), блок коррекции курса 15 (БКК), блок задатчика курса / задатчика магнитного склонения 12 (ЗК/ЗМС), блок выставки начального стояночного курса 14 (БВК), блок программирования маршрута 7 (БПМ), датчик авиагоризонта 20 (ДАГ), содержит систему исполнения команд, включающую в себя блок переключения каналов 3 (БПК), блок исполнения команд 2 (БИК), блок системы управления полётом летательного аппарата 11 (ЛА), блок приёмника-передатчика команд 4 (ППК) для связи с БЦВМ и радиосвязи с пультом управления на начальном пункте маршрута 5 (ПУ НПМ) и пультом управления на конечном пункте маршрута 6 (ПУ КПМ), при этом выход 3 БПК подключён к входу 2 БИК, выход которого подключён к входу системы управления полётом летательного аппарата 11 ЛА, съёмная конструкция блока 14 БВК механически жёстко подключается с помощью реперных штырей к реперным отверстиям 11 ЛА для согласования продольных осей 14 БВК и летательного аппарата 11 ЛА , выход 14 БВК подключён к входу блока 12 ЗК/ЗМС, выход которого подключён к первому входу 9 ГН , выход 15 БКК подключён ко второму входу 9 ГН , выход 9 ГН, выход 1 СВС, выход 10 РВ, выход 7 БПМ, выход 20 ДАГ подключены к отдельным входам 13 БЦВМ ,первый выход 13 БЦВМ подключён к первому входу 3 БПК, первый выход 4 ППК подключён ко второму входу 3 БПК , второй выход 4 ППК подключён к третьему входу 3 БПК и к отдельному входу 13 БЦВМ, блок 4 ППК связан двухсторонней связью с 13 БЦВМ и двухсторонней радиосвязью с пультом управления на начальном пункте маршрута 5 ПУ НПМ и пультом управления на конечном пункте маршрута 6 ПУ КПМ, содержит систему коррекции траекторий полёта на маршруте и при автоматической посадке, включающую в себя приёмник спутниковой навигационной системы 8 СНС, приёмник радиодальномерной системы 17 РДС, блок коррекции траектории на маршруте 16 БКТ, блок коррекции траектории на посадке 18 БКП, блок математического программирования глиссады 19 БПГ, при этом выход 8 СНС подключён к первому входу 16 БКТ, выход 17 РДС подключён ко второму входу 16 БКТ, второй выход 13 БЦВМ подключен к третьему входу 16 БКТ и первому входу 18 БКП, первый выход 16 БКТ подключён к отдельному входу 13 БЦВМ, выход 18 БКП подключён к отдельному входу 13 БЦВМ, второй выход 16 (БКТ) подключён ко второму входу 18 БКП, третий выход 13 БЦВМ подключён к входу 15 БКК, блок 19 БПГ связан с 18 БКТ двухсторонней связью,содержит систему поиска аппарата, включающую в себя блок аварийной посадки 21 (БАП), радиоаппаратуру поиска аппарата 22 (РПА), при этом первый выход 13 БЦВМ подключён к входу 21 БАП, а блок 21 БАП взаимодействует с 22 РПА и 4 ППК двухсторонней радиосвязью.
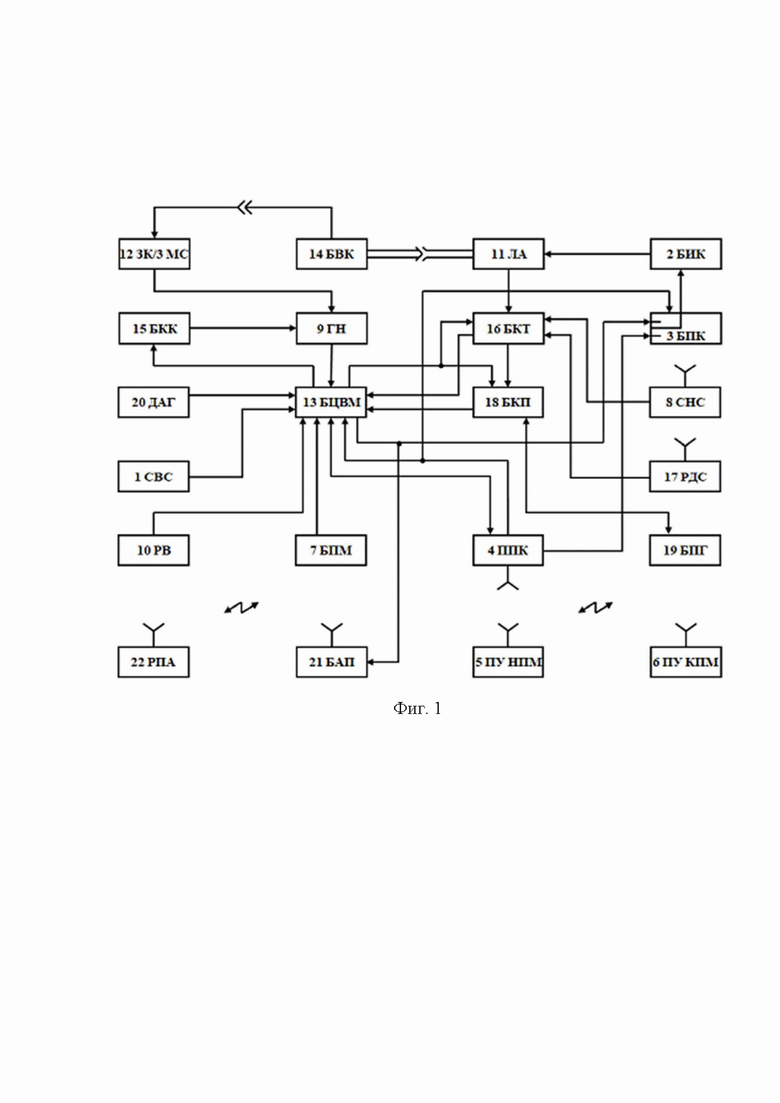
На фиг. 2 приведён эскиз карты полёта транспортного летательного аппарата с выдерживанием заданного курса в режиме радиокоррекции, с условными обозначениями:
 – стояночный курс,
– стояночный курс,  – текущий курс,
– текущий курс,  – заданный курс,
– заданный курс,  – курс взлётно-посадочной полосы (ВПП), N, S, E, W – стороны света (север, юг, восток, запад), по – продольная ось ЛА, D – дальность, h – высота;
– курс взлётно-посадочной полосы (ВПП), N, S, E, W – стороны света (север, юг, восток, запад), по – продольная ось ЛА, D – дальность, h – высота;
А1 – координаты ЛА в автономном полёте;
Курсо-воздушная навигация 
С1 – координаты ЛА, фактические, после коррекции от СНС или от 3-х РДС с помощью блока коррекции траектории – БКТ;
Погрешность автономного полёта –  ;
;
Вычисление  , далее полёт в автономном режиме по
, далее полёт в автономном режиме по  ;
;
АП - координаты (долгота, широта, курс) места аварийной посадки ЛА;
На борту ЛА – приёмник СНС, приёмник РДС – работающий от 3-х и более наземных радиодальномерных систем.
Пилотажно-навигационная система транспортного летательного аппарата в режиме автономной навигации работает следующим образом, (фиг.1, фиг.2). На старте при подготовке к полёту блок 14 БВК с помощью реперных штырей устанавливается на реперные отверстия 11 ЛА, чем достигается согласование продольных осей 14 БВК и 11 ЛА, измеренное 14 БВК значение начального стояночного курса ЛА (магнитного от датчика магнитного курса или истинного курса, измеренного оптическим средством по известному азимуту на ориентир ) вводится в блок 12 ЗК/ЗМС, где с учётом магнитного склонения формируется сигнал начального стояночного курса, после чего при известном значении заданного курса, вычисляется курсовой угол доворота ЛА на заданный курс КПМ, затем сигнал заданного курса вводится на первый вход 9 ГН, с выхода которого поступает на первый вход 13 БЦВМ. 14 БВК снимается с ЛА. При полете по маршруту с выдерживанием заданного курса  запрограммированные в 7 БПМ в цифровом виде координаты начального (НПМ), конечного (КПМ) и промежуточных пунктов маршрута, координаты трех или более наземных радиодальномерных станций РДС1 (
запрограммированные в 7 БПМ в цифровом виде координаты начального (НПМ), конечного (КПМ) и промежуточных пунктов маршрута, координаты трех или более наземных радиодальномерных станций РДС1 ( ), РДС2 (
), РДС2 ( ), РДС3 (
), РДС3 ( ), курс ВПП посадки на КПМ и запасных аэродромов, заданных значений курсов, скоростей, высот полета, углов крена, тангажа в полёте передаются в 13 БЦВМ. Посредством аппаратуры, входящей в состав пилотажно-навигационной системы, измеряются следующие текущие параметры транспортного летательного аппарата: углы крена, тангажа от датчика авиагоризонта 20 ДАГ, курса от гироскопа направления 9 ГН, воздушная скорость и барометрическая высота от системы воздушных сигналов 1 СВС, высота полета от радиовысотомера 10 РВ. Данные параметры движения транспортного летательного аппарата передаются в 13 БЦВМ, где происходит сравнение этих сигналов с заданными в блоке программирования маршрута 7 БПМ параметрами траектории движения транспортного летательного аппарата и их корректировка.
), курс ВПП посадки на КПМ и запасных аэродромов, заданных значений курсов, скоростей, высот полета, углов крена, тангажа в полёте передаются в 13 БЦВМ. Посредством аппаратуры, входящей в состав пилотажно-навигационной системы, измеряются следующие текущие параметры транспортного летательного аппарата: углы крена, тангажа от датчика авиагоризонта 20 ДАГ, курса от гироскопа направления 9 ГН, воздушная скорость и барометрическая высота от системы воздушных сигналов 1 СВС, высота полета от радиовысотомера 10 РВ. Данные параметры движения транспортного летательного аппарата передаются в 13 БЦВМ, где происходит сравнение этих сигналов с заданными в блоке программирования маршрута 7 БПМ параметрами траектории движения транспортного летательного аппарата и их корректировка.
На основании полученных данных 13 БЦВМ производит расчёт координат местоположения – А1 в режиме автономного курсо-воздушного счисления и производит корректировку заданного курса –  .
.
На основании этого 13 БЦВМ вырабатывают в цифровом виде директивные сигналы отклонения транспортного летательного аппарата от рассчитанного заданного курса, которые преобразуются в директорные сигналы управления транспортным летательным аппаратом и поступают с выхода 13 БЦВМ на первый вход 3 БПК .Далее поступающий на вход 3 БПК цифровой директорный сигнал подается в блок исполнения команд 2 БИК, преобразуется в аналоговый и поступает на вход системы управления пилотированием 11 ЛА, которая приводит в действие рулевые тяги, закрылки и т.д. до тех пор, пока не будет обнулен директорный сигнал. Обнуление директорного сигнала означает, что транспортный летательный аппарат вышел на рассчитанный заданный курс полета по расчётным данным автономного счисления. Ручное управление полётом ЛА осуществляется от наземного пульта управления 5 ПУ НПМ или от 6 ПУ КПМ , связанных радиосвязью с блоком приёма-передачи 4 ППК, сигналы управления пилотированием с выхода которого поступают на второй вход 3 БПК.
Переход на ручное управление выполняется по команде от пульта управления 5 НПМ на начальном пункте маршрута или пульта управления 6 КПМ на конечном пункте маршрута, связанных радиосвязью с блоком приёма-передачи 4 ППК , со второго выхода которого командный сигнал поступает на третий вход 3 БПК и на отдельный вход 13 БЦВМ.
Работа канала радиокоррекции траектории ЛА на маршруте в пилотажно-навигационной системе осуществляется следующим образом (фиг.1, фиг.2): координаты от приёмника спутниковой навигационной системы 8 СНС –  (С1) и сигналы дальности от приёмника радиодальномерной системы 17 РДС –
(С1) и сигналы дальности от приёмника радиодальномерной системы 17 РДС –  (для целей дублирования работы каналов радиокоррекции и сравнения расчёта координат) поступают на первый вход 16 БКТ от приёмника 8 СНС и на второй вход 16 БКТ от приёмника 17 РДС[2,4].
(для целей дублирования работы каналов радиокоррекции и сравнения расчёта координат) поступают на первый вход 16 БКТ от приёмника 8 СНС и на второй вход 16 БКТ от приёмника 17 РДС[2,4].
На основании этого в 16 БКТ происходит сравнение координат определённых (фактических) от приёмника 8 СНС (С1) и автономного вычисленных курсо-воздушным счислением с определением погрешностей автономного счисления – и их списания в 13 БЦВМ, при этом определяется заданный курс и дальность – D2 до КПМ. Одновременно в 16 БКТ производится перерасчёт дальностей – , полученных от приёмника 17 РДС, в координаты ЛА и их сравнение с автономно вычисленными курсо-воздушным счислением с определением погрешностей автономного счисления по данным 17 РДС – 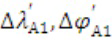 , после чего происходит их списание в 13 БЦВМ, при этом определяется заданный курс –
, после чего происходит их списание в 13 БЦВМ, при этом определяется заданный курс –  и дальность – D´2 до КПМ. При этом вычисленные географические координаты местоположения РДС передаются транзитом в БКТ. Приоритет использования расчётов параметров ЛА от приёмников 8 СНС или 17 РДС отдаётся более помехоустойчивой и работоспособной системе в конкретном полёте. Одновременно происходит сравнение показаний с выдачей сигнала превышения допуска.
и дальность – D´2 до КПМ. При этом вычисленные географические координаты местоположения РДС передаются транзитом в БКТ. Приоритет использования расчётов параметров ЛА от приёмников 8 СНС или 17 РДС отдаётся более помехоустойчивой и работоспособной системе в конкретном полёте. Одновременно происходит сравнение показаний с выдачей сигнала превышения допуска.
Таким образом, в 13 БЦВМ производится решение математических задач по автономной курсо-воздушной навигации, а в канале коррекции траектории на маршруте в составе 16 БКТ решаются задачи вычисления сигналов коррекции параметров от приемников 8 СНС и 17 РДС с расчетом заданного курса на КПМ и их передача в 13 БЦВМ-1, для проведения коррекции текущих параметров навигации БПЛА. Конечным результатом работы навигации пилотажно-навигационной системы в режиме радиокоррекции траектории на маршруте является обеспечения точного выхода ЛА в зону конечного пункта маршрута (КПМ) для захода на посадку от контрольной точки начала посадки.
13 БЦВМ осуществляет контроль работоспособности входящих в пилотажно-навигационную систему блоков на основе их средств встроенного контроля. При обнаружении неисправности и при расхождении значений параметров, вычисленных от 8 СН и 17 РДС , 13 БЦВМ передаёт в 4 ППК соответствующий сигнал, который транслируется далее на пульт управления 5 ПУ НПМ на начальном пункте маршрута и на пульт управления 6 ПУ КПМ на конечном пункте маршрута. На основании этого наземные службы принимают решение, каким образом осуществлять полет транспортного летательного аппарата.
Далее в материалах данного описания рассматривается решение вопросов системы поиска аппарата (СПА) по определению зоны аварийной посадки и значений координат и курса БПЛА в момент снятия силнала пилотажно-навигационной системы “Испрравность БПЛА”. Решение задач штатной автоматической посадки не рассматриваются.
Система поиска аппаратуры СПА работает следующим образом. Блок 21 БАП размещается на борту ЛА, радиоаппаратура поиска аппарата 22 РПА размещается на поисковом ЛА (БПЛА и др.) В полёте питание БАП осуществляется от бортового источника питания. С блоков 21 БАП и 4 ППК периодически ввиде импульса выдаётся в эфир радиосигнал “Исправность БПЛА”.Этот импульсный радиосигнал может быть зафиксирован на приёмнике радиосигналов другого ЛА, находящегося в зоне полёта данного БПЛА, а его пропадание (снятие) воспринимается как аварийная посадка искомого БПЛА или как уход из зоны их смежной работы летательных аппаратов. Данный момент с регистрацией времени и координат в смежном ЛА может быть использован как предварительное обозначение зоны аварийной посадки искомого БПЛА. Работа блока 21 БАП на борту ЛА и работа 22 РПА выполняются следующим образом: В полёте с первого выхода вычислителя пилотажно-навигационной системы 13 БЦВМ в 21 БАП передаются в цифровом виде вычисленные значения текущих координат и курса БПЛА, которые запоминаются на 3-х обновляемых регистрах. При снятии сигнала “Исправность БПЛА” 21 БАП переходит на работу от собственного энергонезависимого источника питания. При этом происходит “замораживание” последних 3-х значений координат и курса БПЛА, что определяет местоположение искомого БПЛА совершившего аварийную посадку. При этом блок 21 БАП периодически передаёт в эфир радиосигнал “Исправность БАП”. В начале работ по поиску поисковый ЛА с 22 РПА в полёте передаёт постоянно радиосигнал “Вкдючи работу 21 БАП”. В случае приёма данного сигнала блок 21 БАП начинает периодически выдавать в эфир радиосигналы, находящиеся на его “заморожннных” регистрах зарегистрированные значения координат и курса места аварийной посадки БПЛА, которые регистрируются в поисковом ЛА. Поисковый ЛА зависает над принятыми радиосигналами “Исправность БАП” и местом хранения координат в блоке 21 БАП аварийной посадки и сбрасывает радиовымпел [3]. При этом по данным приёмника СНС поискового ЛА уточняются координаты места аварийной посадки БПЛА. После возвращения поискового ЛА на контрольный (конечный) пункт маршрута (КПМ), установленные координаты места аварийной посадки используются для начала работ по спасению транспортного БПЛА, совершившего аварийную посадку. Высота челночного полёта поискового ЛА и радиус действия зоны поиска поискового ЛА определяются возможностыми 2-х сторнних радиосвязей блоков 21 БАП, 4 ППК и 22 РПА. Вемя поисковых работ ограничено запасами ёмкости источника питания 21 БАП.
Источники информации
1 Патент РФ № 145174 C1 на полезную модель «Пилотажно-навигационная система транспортного летательного аппарата», 2019 г.
2 Патент РФ №2801013 C1 на изобретение «Пилотажно-навигационная система транспортного летательного аппарата», 2023 г.
3 Патент РФ № 2663280 С1 на изобретение “Способ отвода лесосек”, 2018 г.
4 Скуднева О. В. Алгоритм разработки структурных схем навигационно-пилотажных систем в составе бортового оборудования транспортного летательного аппарата // Приборы и системы : Управление, Контроль, Диагностика, 2023, № 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2017 |
|
RU2685572C2 |
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
Пилотажно-навигационная система транспортного летательного аппарата содержит автоматический навигатор (АН), включающий в себя гироскоп направления (ГН), бортовую цифровую вычислительную машину (БЦВМ), систему воздушных сигналов (СВС), радиовысотомер (РВ), блок коррекции курса (БКК), блок задатчика курса/задатчика магнитного склонения (ЗК/ЗМС), блок выставки начального стояночного курса (БВК), блок программирования маршрута (БПМ), датчик авиагоризонта (ДАГ), а также содержит систему исполнения команд, включающую в себя блок переключения каналов (БПК), блок исполнения команд (БИК), блок системы управления полётом летательного аппарата (ЛА), блок приёмника-передатчика команд (ППК) для связи с БЦВМ и радиосвязи с пультом управления на начальном пункте маршрута (ПУ НПМ) и пультом управления на конечном пункте маршрута (ПУ КПМ), содержит систему коррекции траекторий полёта на маршруте и при автоматической посадке, включающую в себя приёмник спутниковой навигационной системы (СНС), приёмник радиодальномерной системы ( РДС), блок коррекции траектории на маршруте (БКТ), блок коррекции траектории на посадке (БКП), блок математического программирования глиссады (БПГ), содержит систему поиска аппарата, включающую в себя блок аварийной посадки (БАП), радиоаппаратуру поиска аппарата (РПА), соединенные определенным образом. Обеспечивается возможность в условиях аварийной посадки определять и сохранять координаты местоположения аварийной посадки транспортного летательного аппарата и передавать их в радиоаппаратуру поиска аппарата. 2 ил.
Пилотажно-навигационная система транспортного летательного аппарата, содержащая автоматический навигатор, включающий в себя гироскоп направления (ГН), бортовую цифровую вычислительную машину (БЦВМ), систему воздушных сигналов (СВС), радиовысотомер (РВ), блок коррекции курса (БКК), блок задатчика курса/задатчика магнитного склонения (ЗК/ЗМС), блок выставки начального стояночного курса (БВК), блок программирования маршрута (БПМ), датчик авиагоризонта (ДАГ), содержащая систему исполнения команд, включающую блок переключения каналов (БПК), блок исполнения команд (БИК), блок системы управления летательным аппаратом (ЛА), блок приёмника-передатчика команд (ППК) для радиосвязи с пультом управления на начальном пункте маршрута (ПУ НПМ) и пультом управления на конечном пункте маршрута (ПУ КПМ), при этом выход БПК подключён к входу БИК, выход которого подключён к входу системы управления летательного аппарата (ЛА), съёмная конструкция блока БВК механически жёстко подключается с помощью реперных штырей к реперным отверстиям ЛА, выход БВК подключён к входу блока ЗК/ЗМС, выход которого подключён к первому входу ГН, выход БКК подключён ко второму входу ГН, выход ГН, выход СВС, выход РВ, выход БПМ, выход ДАГ подключены к отдельным входам БЦВМ, первый выход БЦВМ подключён к первому входу БПК, первый выход ППК подключён ко второму входу БПК, второй выход ППК подключён к третьему входу БПК и к отдельному входу БЦВМ, блок ППК связан двухсторонней связью с БЦВМ и двухсторонней радиосвязью с пультом управления на начальном пункте маршрута (ПУ НПМ) и пультом управления на конечном пункте маршрута (ПУ КПМ), содержащая систему радиокоррекции траекторий полёта на маршруте и при автоматической посадке, включающую в себя приёмник спутниковой навигационной системы (СНС), приёмник радиодальномерной системы (РДС), работающий от трёх и более наземных радиодальномерных систем, блок коррекции траектории на маршруте (БКТ), блок коррекции траектории на посадке (БКП), блок математического программирования глиссады (БПГ), при этом выход СНС подключён к первому входу БКТ, выход РДС подключён ко второму входу БКТ, второй выход БЦВМ подключен к третьему входу БКТ и первому входу БКП, первый выход БКТ подключён к отдельному входу БЦВМ, выход БКП подключён к отдельному входу БЦВМ, второй выход БКТ подключён ко второму входу БКП, третий выход БЦВМ подключён к входу БКК, блок БПГ связан с БКП двухсторонней связью, отличающаяся тем, что в неё дополнительно введена система поиска аппарата, совершившего аварийную посадку, вкючающая в себя блок аварийной посадки (БАП) и радиоаппарату поиска аппарата (РПА), при этом первый выход БЦВМ подключён к входу БАП, а блок БАП взаимодействует с РПА и ППК двухсторонней радиосвязью.
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| РЕЗЕРВИРОВАННОЕ ПИЛОТАЖНОЕ УСТРОЙСТВО С ДАТЧИКАМИ ДЛЯ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2668077C1 |
| Железобетонный кожух для потолочных разделок дымовых труб | 1927 |
|
SU7755A1 |
| DE 69034047 T2, 25.03.2004. | |||

