Изобретение относится к области приборостроения, а именно к пилотажно-навигационному оборудованию транспортных самолетов, вертолетов и беспилотных летательных аппаратов.
Известна пилотажно-навигационная система транспортного летательного аппарата (патент РФ на полезную модель №145174 «Пилотажно-навигационная система транспортного летательного аппарата»; МПК G01C 23/00, (2006.1), 2014 г., О.В. Скуднева "Беспилотные летательные аппараты в системе лесного хозяйства России" Лесной журнал, №6/342, 2014 г, Изд. САФУ, Архангельск), содержащая аппаратуру текущих пилотажно-навигационных параметров (АТПН) для измерения курса, углов крена и тангажа, воздушной скорости, барометрической высоты, относительной высоты от радиовысотомера для определения координат посредством радиосистем, блок коммутации (БК), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БК подключен ко входу БИК.
Недостаток такой пилотажно-навигационной системы характеризуется необходимостью наличия членов экипажа для решения задач пилотирования летательным аппаратом (ЛА).
Наиболее близкой по технической сущности к заявленному решению является пилотажно-навигационная система транспортного летательного аппарата (патент РФ на изобретение №2597814 «Пилотажно-навигационная система транспортного летательного аппарата»; МПК G01C 23/00, (2006.1), 2016 г.), содержащая инерциальные системы (ИС) для определения углов крена, тангажа, курса, инерциальных скоростей и координат местоположения, систему воздушных сигналов (СВС) для измерения воздушной скорости и барометрической высоты, аппаратуру для измерения относительной высоты посредством радиовысотомера (РВ), аппаратуру для определения путевой скорости и координат посредством инерциальных и радио систем, блок коммутации (БК), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БК подключен к входу БИК через цифро-аналоговый преобразователь (ЦАП), спутниковую навигационную систему (СНС), блок программы маршрута (БПМ), блок взлета-посадки (БВП), выполнены первый и второй автоматические навигаторы (АН), причем первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы (ИС-1), второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы (ИС-2), причем выход ИС-1 подключен к входу БЦВМ-1 и к первому входу БВП, а выход ИС-2 подключен к входу БЦВМ-2 и ко второму входу БВП, выходы СВС, РВ подключены к входам БЦВМ-1 и БЦВМ-2, один из выходов БПМ, СНС и ПП подключены к входам БЦВМ-1, другие выходы БПМ, СНС, ПП подключены к входам БЦВМ-2, выход БВП подключен к входам БЦВМ-1, БЦВМ-2, ПП, выход БЦВМ-1 подключен к первому входу БК, выход БЦВМ-2 подключен ко второму входу БК, выход БК подключен к входу цифро-аналогового преобразователя ЦАП, выход ЦАП подключен к входу БИК, один из выходов каждой из БЦВМ-1 и БЦВМ-2 подключен к входу другой или БЦВМ-1, или БЦВМ-2. БЦВМ-1 и БЦВМ-2 соединены с ПП двухсторонней связью.
Недостаток такой пилотажно-навигационной системы заключается в необходимости постоянно выдерживать в полете траекторию заданного маршрута с заданным азимутом, что не является обязательным условием для работы транспортного беспилотного летательного аппарата БПЛА, а при низкой помехоустойчивости СНС является трудновыполнимой задачей, требующей решения дополнительных задач в БЦВМ-1 и БЦВМ-2.
Целью транспортного БПЛА является гарантированный прилет в точку или зону посадки на КПМ.
Технический результат заявляемого решения заключается в обеспечении беспилотного управления транспортным летательным аппаратом по рассчитываемому заданному курсу с применением двухканальной цифровой пилотажно-навигационной системы, с использованием инерциальных систем и блока взлета-посадки, дополненных каналом коррекции траектории в составе блока коррекции траектории, приемника спутниковой навигационной системы и приемника дальномерной радиосистемы, что обеспечивает повышение точности и надежности работы пилотажно-навигационной системы, повышение безопасности пилотирования летательным аппаратом.
Данный технический результат достигается в пилотажно-навигационной системе транспортного летательного аппарата, содержащей инерциальные системы (ИС) для определения углов крена, тангажа, курса, инерциальных скоростей и координат местоположения, систему воздушных сигналов (СВС) для измерения воздушной скорости и барометрической высоты, аппаратуру для измерения относительной высоты посредством радиовысотомера (РВ), аппаратуру для определения путевой скорости и координат посредством инерциальных и радио систем, блок переключения каналов (БПК), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БПК подключен к входу БИК через цифро-аналоговый преобразователь (ЦАП), блок программы маршрута (БПМ), блок взлета-посадки (БВП), выполнены первый и второй автоматические навигаторы (АН), причем первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы (ИС-1), второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы (ИС-2), причем выход ИС-1 подключен к входу БЦВМ-1 и к первому входу БВП, а выход ИС-2 подключен к входу БЦВМ-2 и ко второму входу БВП, выходы СВС, РВ подключены к входам БЦВМ-1и БЦВМ-2, по одному из выходов БПМ и ПП подключено к входам БЦВМ-1, другие выходы БПМ, ПП подключены к входам БЦВМ-2, выход БВП подключен к входам БЦВМ-1, БЦВМ-2, ПП, выход БЦВМ-1 подключен к первому входу БПК, выход БЦВМ-2 подключен ко второму входу БПК, выход БПК подключен к входу цифро-аналогового преобразователя ЦАП, выход ЦАП подключен к входу БИК, один из выходов каждой из БЦВМ-1 и БЦВМ-2 подключен к входу другой или БЦВМ-1, или БЦВМ-2. БЦВМ-1 и БЦВМ-2 соединены с ПП двухсторонней связью.
Дополнительно в состав пилотажно-навигационной системы введен канал коррекции траектории летательного аппарата ЛА, состоящий из блока коррекции траектории (БКТ), приемника спутниковой навигационной системы (СНС) и приемника радиодальномерной системы (РДС), при этом вход А БКТ подключен к выходу приемника СНС, вход Б БКТ подключен к выходу приемника РДС, вход В БКТ подключен к выходу БЦВМ-1, вход Г БКТ подключен к выходу БЦВМ-2, выход БКТ и подключен к одному из входов БЦВМ-1 и БЦВМ-2.
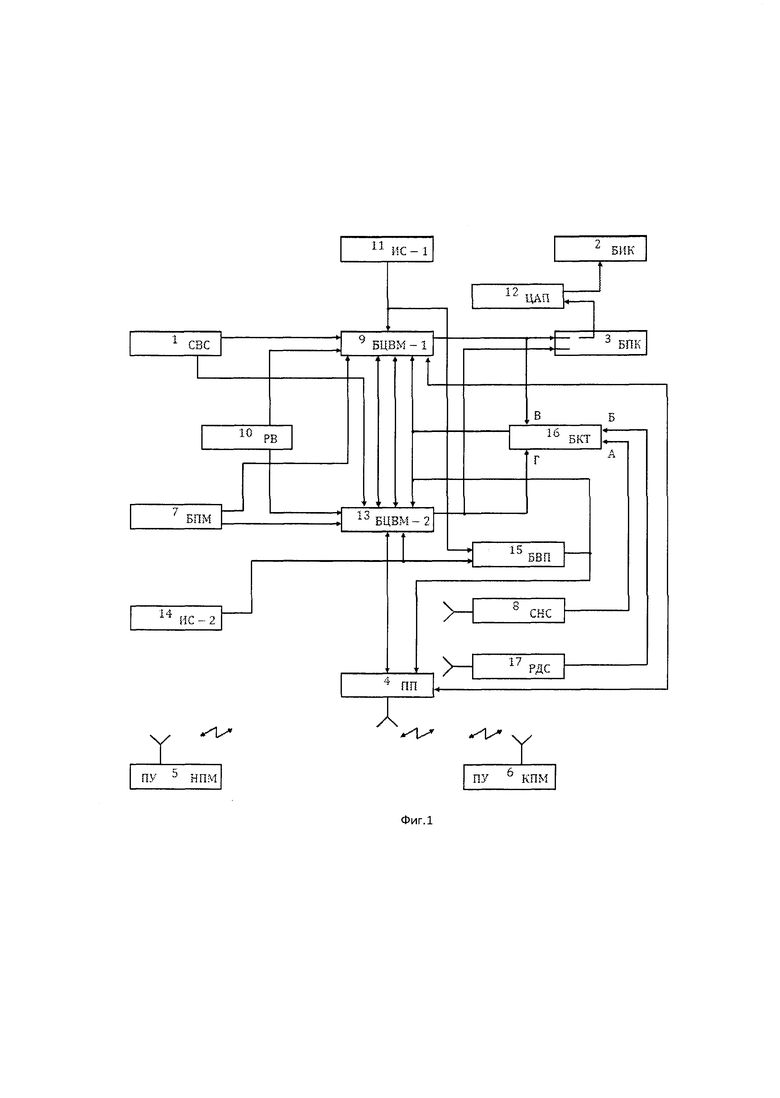
На фиг. 1 представлена структурная блок-схема цифровой пилотажно-навигационной системы беспилотного транспортного летательного аппарата.
Пилотажно-навигационная система (ПНС) беспилотного транспортного летательного аппарата (фиг. 1) содержит систему воздушных сигналов (СВС) 1, блок исполнения команд (БИК) 2, блок переключения каналов (БПК) 3, приемник-передатчик (ПП) 4 системы радиосвязи с пультом управления на начальном пункте маршрута (НПМ) 5, пульт управления на конечном пункте маршрута (КПМ) 6, блок программы маршрута (БПМ) 7, приемник спутниковой навигационной системы (СНС) 8 канала коррекции траектории ЛА, первую бортовую цифровую вычислительную машину (БЦВМ-1) 9 первого автоматического навигатора (АН), радиовысотомер (РВ) 10, первую инерциальную систему (ИС-1) 11 первого АН, цифро-аналоговый преобразователь (ЦАП) 12, вторую бортовую цифровую вычислительную машину (БЦВМ-2) 13 и вторую инерциальную систему (ИС-2) 14 второго АН, блок взлета-посадки (БВП) 15, блок коррекции траектории (БКТ) 16 с входами А, Б, В, Г и приемник радиодальномерной системы (РДС) 17 канала коррекции траектории ЛА.
Выход ИС-1 11 подключен к одному из входов БЦВМ-1 9 и первому входу БВП 15, выход ИС-2 14 подключен к одному из входов БЦВМ-2 13 и второму входу БВП. Выходы СВС 1 и РВ 10 подключены к входам БЦВМ-1 9 и БЦВМ-2 13, по одному из выходов БПМ 7, ПП 4 подключено к входам БЦВМ-1 9, а другие выходы БПМ 7,, ПП 4 подключены к входам БЦВМ-2, выход БВП 15 подключен к отдельным входам БЦВМ-1 9, БЦВМ-2 13 и ПП 4. Выход БЦВМ-1 9 подключен к одному из входов БПК 3. Выход БЦВМ-2 13. подключен ко второму входу БПК 3. Выход БПК 3 подключен к входу ЦАП 12, выход ЦАП 12 подключен к входу БИК 2. Один из выходов каждой из БЦВМ-1 9 и БЦВМ-2 13 подключен к входу другой или БЦВМ-1 9, или БЦВМ-2 13. Вход (А) БКТ 16 подключен к выходу приемника СНС 8, вход (Б) БКТ 16 подключен к выходу приемника РДС 17, вход (В) БКТ 16 подключен к выходу БЦВМ-1 9, вход (Г) БКТ 16 подключен к выходу БЦВМ-2 13, выход БКТ 16 подключен к одному из входов БЦВМ-1 и БЦВМ-2. БЦВМ-1 9 и БЦВМ-2 13 соединены с ПП 4 двухсторонней связью. ПП 4 взаимодействует с помощью двухсторонней радиосвязи с наземными пультами НПМ 5, КПМ 6.
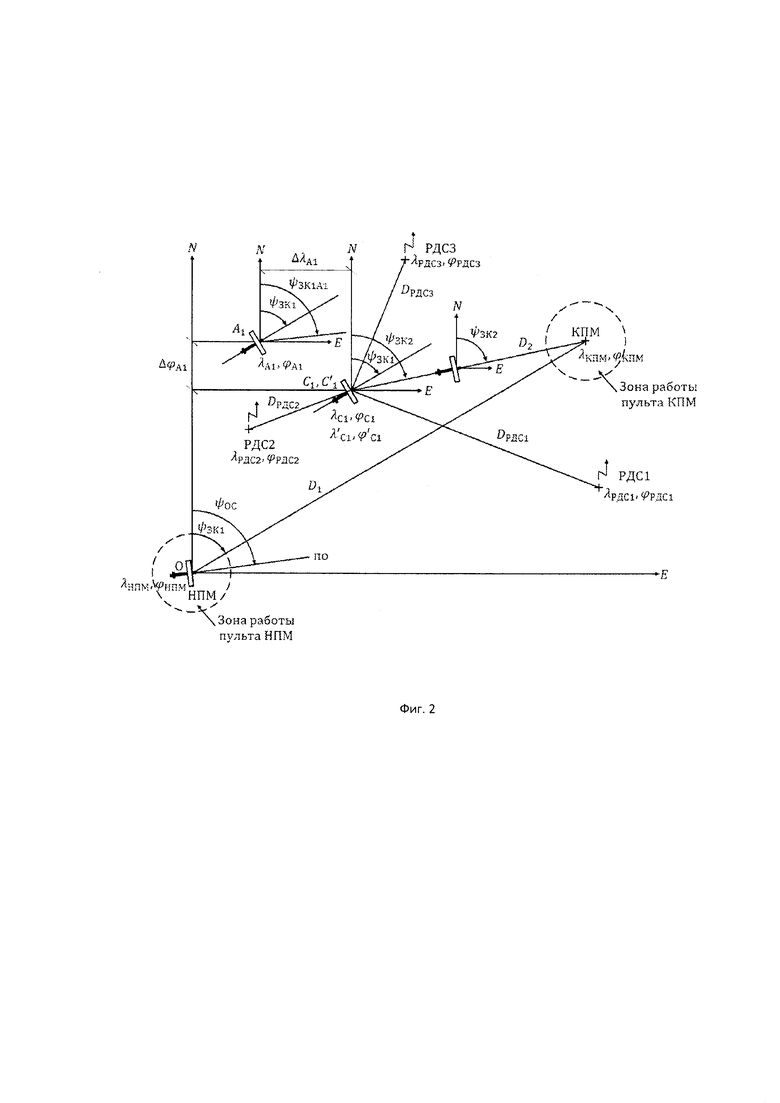
На фиг. 2 приведена схема карты полета транспортного БПЛА с выдерживанием заданного курса с условными обозначениями и указанием цели ПНС для БПЛА, где:
ψОС - стояночный курс, ψЗК - заданный курс, по - продольная ось ЛА, D - дальность
А1 - координаты ЛА в автономном полете,
Курсо-воздушная или инерциальная навигация, λА1, ϕА1,  =ψТЕК
=ψТЕК
С1 - координаты ЛА, фактические, после коррекции от СНС или от 3-х РДС с помощью блока коррекции траектории - БКТ (погрешность автономного полета - ΔλА1, ΔϕА1).
Вычисление λС1, ϕС1,  , D2, =ψТЕК, далее полет в автономном режиме по .
, D2, =ψТЕК, далее полет в автономном режиме по .
На борту ЛА - приемник СНС, приемник РДС - от 3-х и более наземных радиодальномерных систем.
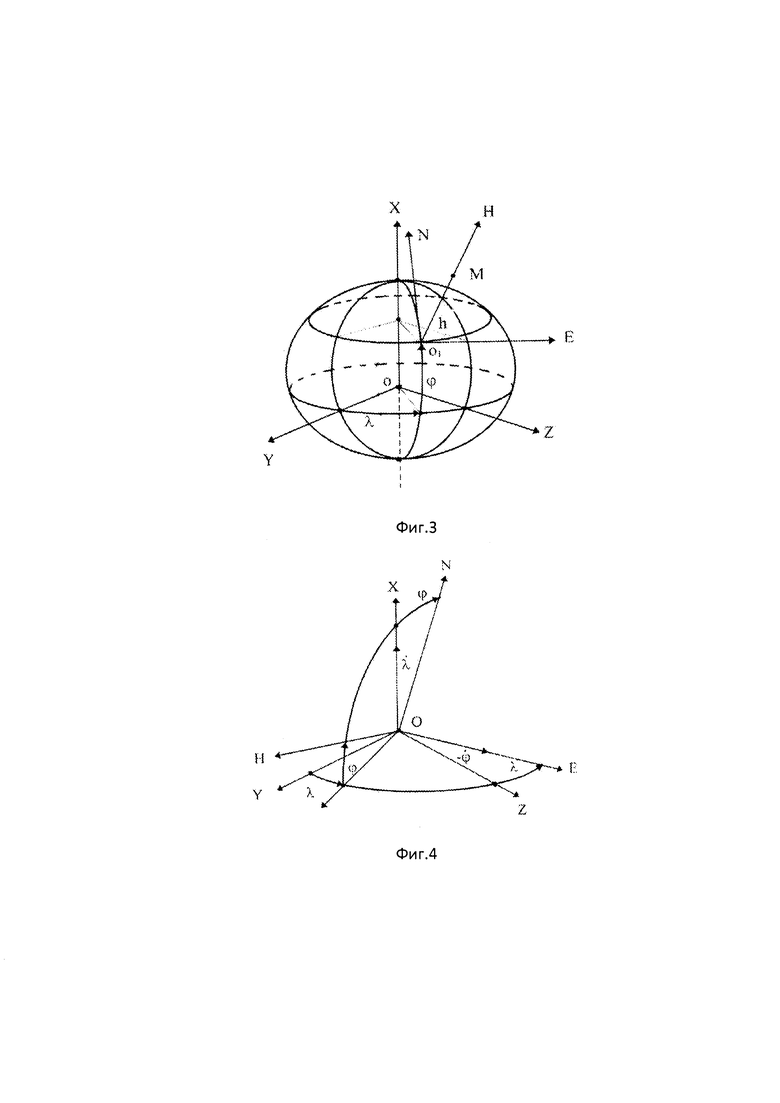
На фиг. 3 приведена ориентация географического сопровождающего трехгранника (ГСТ) ONHE и ГСТ OXYZ относительно Земного эллипсоида.
На фиг. 4 приведена взаимная ориентация ГСТ ONHE и ГСТ OXYZ.
Рассогласование указанных систем координат определяется углами ϕ и λ местоположения БПЛА. Переход от осей ГСТ OXYZ к осям ГСТ ONHE осуществляется посредством двух последовательных поворотов на углы ϕ и λ с угловыми скоростями  и
и  соответственно. Приведенное на фиг. 4 направления отсчета углов ϕ, λ и угловых скоростей
соответственно. Приведенное на фиг. 4 направления отсчета углов ϕ, λ и угловых скоростей  ,
,  являются положительными.
являются положительными.
Пилотажно-навигационная система транспортного летательного аппарата работает следующим образом. При полете по маршруту с выдерживанием заданного курса запрограммированные в БПМ 7 в цифровом виде координаты начального (НПМ), конечного (КПМ) и промежуточных пунктов маршрута, координаты трех или более наземных радиодальномерных станций РДС1 (λРДС1, ϕРДС1), РДС2 (λРДС2, ϕРДС2), РДС3 (λРДС3, ϕРДС3) и запасных аэродромов, заданных значений курсов, скоростей, высот полета, углов крена, тангажа в полете передаются в БЦВМ-1 9 и БЦВМ-2 13. Посредством аппаратуры, входящей в состав пилотажно-навигационной системы, измеряются следующие текущие параметры транспортного летательного аппарата: углы крена, тангажа, курса, инерциальных скоростей, определяемых инерциальными системами ИС-1 11 и ИС-2 14, воздушная скорость и барометрическая высота от системы воздушных сигналов СВС 1, высота полета от радиовысотомера РВ 10. Данные параметры движения транспортного летательного аппарата передаются в БЦВМ-1 9 и БЦВМ-2 13, где происходит сравнение этих сигналов с заданными в БПМ 7 параметрами траектории движения транспортного летательного аппарата и их корректировка, при этом географические координаты местоположения РДС передаются транзитом в БКТ 16.
На основании полученных данных БЦВМ-1 9 и БЦВМ-2 13 производят расчет координат местоположения - А1 в режиме автономного курсо-воздушного [3], [4] и инерциального счисления (для целей дублирования и сравнения), с приоритетом к инерциальным данным - λА1, ϕА1, и производит корректировку заданного курса - 
На основании этого БЦВМ-1 9 и БЦВМ-2 13 вырабатывают в цифровом виде дерективные сигналы отклонения транспортного летательного аппарата от рассчитанного заданного курса, которые преобразуются в директорные сигналы управления транспортным летательным аппаратом и поступают с выхода БЦВМ-1 9 на один из входов БПК 3, а также вход В БКТ 16 и с выхода БЦВМ-2 13 на другой вход БПК 3, а также на вход Г БКТ 16.
Далее поступающий на один из входов БПК 3 директорньгй сигнал поступает в цифро-аналоговый преобразователь ЦАП 12, с выхода которого аналоговый сигнал подается в блок исполнения команд БИК 2, который приводит в действие рулевые тяги, закрылки и т.д. до тех пор, пока не будет обнулен директорный сигнал. Обнуление директорного сигнала означает, что транспортный летательный аппарат вышел на рассчитанный заданный курс полета. Выбор одного из двух АН, по директорному сигналу которого должна осуществляться работа БИК 2, определяется указанием ПП 4 от пульта управления НПМ 5 на начальном пункте маршрута или пульта управления КПМ 6 на конечном пункте маршрута. Работа канала коррекции траектории ЛА в пилотажно-навигационной системе осуществляется следующим образом: координаты от приемника спутниковой навигационной системы СНС 8 - λС1, ϕС1 (С1) и сигналы дальности от приемника радиодальномерной системы РДС 17 - DРДС1, DРДС2, ВРДС3 (для целей дублирования и сравнения координат) поступают на вход А БКТ 16 от приемника СНС 8 и на вход Б БКТ 16 от приемника РДС 17.
На основании этого в БКТ 16 происходит сравнение координат определенных (фактических) от приемника СНС 8 (С1) и автономного вычисленных курсо-воздушным и инерциальным счислением с определением погрешностей автономного счисления - ΔλА1, ΔϕА1 и их списания в БЦВМ-1 9 и БЦВМ-2 13, при этом определяется заданный курс  и дальность - D2 до КПМ. Одновременно в БКТ 16 производится перерасчет дальностей - DРДС1, DРДС2, DРДС3, полученных от приемника РДС 17, в координаты ЛА и их сравнение с автономно вычисленными курсо-воздушным и инерциальным счислением с определением погрешностей автономного счисления по данным РДС 17 -
и дальность - D2 до КПМ. Одновременно в БКТ 16 производится перерасчет дальностей - DРДС1, DРДС2, DРДС3, полученных от приемника РДС 17, в координаты ЛА и их сравнение с автономно вычисленными курсо-воздушным и инерциальным счислением с определением погрешностей автономного счисления по данным РДС 17 -  ,
,  , после чего происходит их списание в БЦВМ-1 9 и БЦВМ-2 13, при этом определяется заданный курс -
, после чего происходит их списание в БЦВМ-1 9 и БЦВМ-2 13, при этом определяется заданный курс -  и дальность D'2 до КПМ. Приоритет использования расчетов параметров ЛА от приемников СНС 8 или РДС 17 отдается более помехоустойчивой и работоспособной системе в конкретном полете. Одновременно происходит сравнение показаний с выдачей сигнала превышения допуска.
и дальность D'2 до КПМ. Приоритет использования расчетов параметров ЛА от приемников СНС 8 или РДС 17 отдается более помехоустойчивой и работоспособной системе в конкретном полете. Одновременно происходит сравнение показаний с выдачей сигнала превышения допуска.
Таким образом в БЦВМ-1 9, БЦВМ-2 13 производится решение математических задач по автономной курсо-воздушной и инерциальной навигации, а в канале коррекции траектории в составе БКТ 16 решаются задачи вычисления сигналов коррекции параметров от приемников СНС 8 и РДС 17 с расчетом заданного курса на КПМ и их передача в БЦВМ-1 9, БЦВМ-2 16 для проведения коррекции текущих параметров навигации БПЛА.
БЦВМ-1, 9 и БЦВМ-2 13 осуществляют межмашинный обмен информацией, в том числе для осреднения вычислений, контроля работоспособности каждого АН и канала коррекции траектории от приемников СНС 8 и РДС 17 на основании их средств встроенного контроля на предмет отключения отказавшего. При превышении допустимых расхождений в вычисленных управляющих сигналах первого и второго АН и при расхождении значений параметров, вычисленных от СНС 8 и РДС 17, БЦВМ-1 9 и БЦВМ-2 13 передают в ПП 4 соответствующий сигнал, который транслируется далее на пульт управления НПМ 5 на начальном пункте маршрута и на пульт управления КПМ 6 на конечном пункте маршрута. На основании этого наземные службы принимают решение, каким образом осуществлять полет транспортного летательного аппарата.
Блок БВП 15 принимает текущие значения углов крена, тангажа, курса и составляющих скорости непосредственно от ИС-1 11 и ИС-2 14, разница сравниваемых величин параметров не должна превышать допустимых порогов, запрограммированных в блоке БВП 15, в случае их превышения БВП 15 выдает сигнал превышения допустимого рассогласования в БЦВМ-1 9 и БЦВМ-2 13 для учета и в ПП 4 для принятия решения наземными службами.
Такое техническое решение позволяет обеспечить гарантированный прилет БПАЛ в точку или зону КПМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| Способ отвода лесосек | 2017 |
|
RU2663280C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
Изобретение относится к области навигационного приборостроения и может найти применение в пилотажно-навигационных системах летательных аппаратов. Технический результат – повышение надежности. Для этого цифровая пилотажно-навигационная система транспортного летательного аппарата включает аппаратуру текущих пилотажно-навигационных параметров (ИС-1, ИС-2, СВС, РВ), блок переключения каналов (ВПК), цифроаналоговый преобразователь (ЦАП), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), блок программы маршрута (БПМ), блок взлета-посадки (ВВП), а также выполнены первый и второй автоматические навигаторы (АН). Первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы (ИС-1), второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы (ИС-2). Технический результат - обеспечение беспилотного управления транспортным летательным аппаратом по рассчитываемому заданному курсу, повышение точности и надежности работы пилотажно-навигационной системы, повышение безопасности пилотирования летательного аппарата достигается за счет дополнительного введения канала коррекции траектории, состоящего из блока коррекции траектории (БКТ), приемника спутниковой навигационной система (СНС), приемника дальномерной системы (РДС), работающего от трех и более наземных радиодальномерных систем, при этом выходы приемников СНС и РДС подключены каждый к своему входу БКТ, выходы БЦВМ-1 и БЦВМ-2 подключены каждый к другим своим входам БКТ; выход БКТ подключен к одному из входов БЦВМ-1 и к одному из входов БЦВМ-2. 4 ил.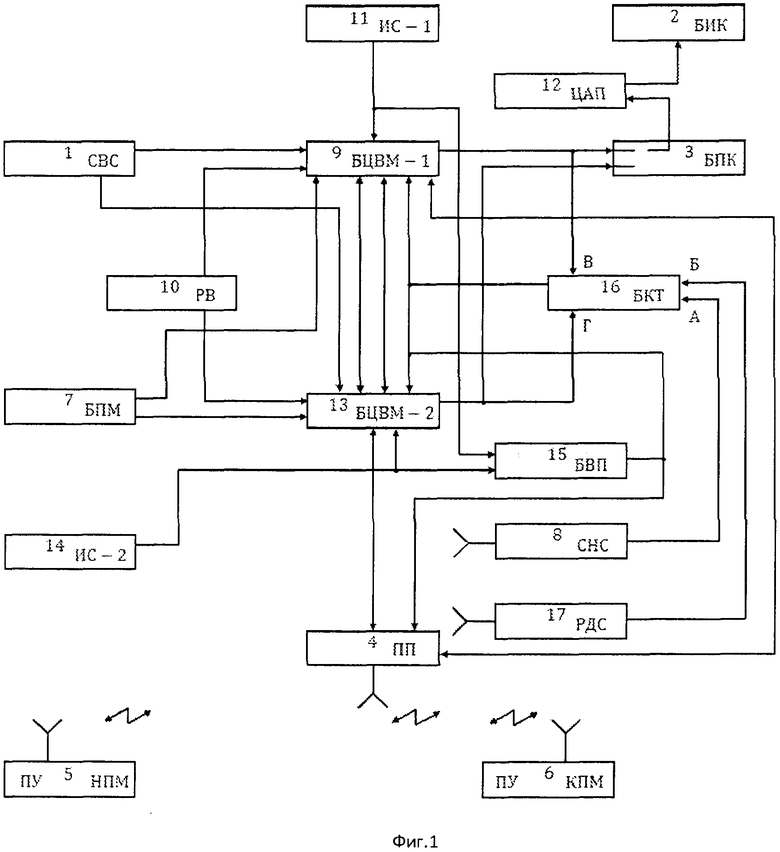
Пилотажно-навигационная система транспортного летательного аппарата, содержащая цифровую аппаратуру текущих пилотажно-навигационных параметров для измерения курса, углов крена, тангажа, инерциальных скоростей (ИС-1), (ИС-2), воздушной скорости, барометрической высоты (СВС), относительной высоты от радиовысотомера (РВ) для определения координат посредством инерциальных и радиосистем на основе инерциального и курсо-воздушного автономного счисления, блок переключения каналов (БПК), блок программы маршрута (БПМ), блок взлета-посадки (БВП), цифроаналоговый преобразователь (ЦАП), блок исполнения команд (БИК), систему радиосвязи с приемником-передатчиком (ПП) связи с пультом управления на начальном пункте маршрута (НПМ) и пультом управления на конечном пункте маршрута (КПМ), причем выход БПК подключен к входу ЦАП, выход которого подключен к входу БИК, выполнены первый и второй автоматические навигаторы (АН), при этом первый АН выполнен в составе первой бортовой цифровой вычислительной машины (БЦВМ-1), первой инерциальной системы ИС-1 и первого канала блока взлета-посадки, второй АН выполнен в составе второй бортовой цифровой вычислительной машины (БЦВМ-2), второй инерциальной системы ИС-2 и второго канала блока взлета-посадки, причем выходы СВС, РВ подключены к входам БЦВМ-1, БЦВМ-2, выход ИС-1 подключен к БЦВМ-1 и к первому входу БВП, а одни из выходов БПМ и ПП подключены к входам БЦВМ-1, выход ИС-2 подключен к БЦВМ-2 и ко второму входу БВП, а другие выходы БМП и ПП подключены к входам БЦВМ-2, выход БВП подключен к входам БЦВМ-1, БЦВМ-2, ПП; выход БЦВМ-1 подключен к первому входу БПК, выход БЦВМ-2 подключен ко второму входу БПК, один из выходов каждой из БЦВМ-1 и БЦВМ-2 подключен к входу другой, или БЦВМ-1, или БЦВМ-2, БЦВМ-1 и БЦВМ-2 соединены с ПП двухсторонней связью, отличающаяся тем, что в нее введен канал коррекции траектории, состоящий из блока коррекции траектории (БКТ), приемника спутниковой навигационной системы (СНС) и приемника дальномерной системы (РДС), работающего от трех и более наземных радиодальномерных систем, при этом выход приемника СНС подключен к выходу (А) БКТ, а выход приемника РДС подключен к выходу (Б) БКТ, выход БЦВМ-1 подключен к первому входу БПК и подключен к выходу (В) БКТ, выход БЦВМ-2 подключен ко второму входу БПК и подключен к выходу (Г) БКТ, выход БКТ подключен к одному из входов БЦВМ-1 и к одному из входов БЦВМ-2.
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| 0 |
|
SU151304A1 | |
| Вибрационный питатель к погрузочной машине | 1961 |
|
SU145174A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| Авиационные системы управления | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радиоэлектронные системы самонаведения | |||
| Под ред | |||
| А.И.Канащенкова и В.И.Меркулова | |||
| - М.: Радиотехника, 2003, с.74. | |||

