Область техники
Настоящее изобретение относится к системе подачи в ракетном двигателе, по меньшей мере, одного жидкого ракетного топлива, содержащей, по меньшей мере, один контур подачи.
Предшествующий уровень техники
В области ракет на жидком топливе, термин «эффект Пого» используется для обозначения процесса вхождения в резонанс жидкого топлива в контуре подачи топлива в ракетном двигателе, приводящего к механическим колебаниям ракеты. Поскольку тяга ракетного двигателя изменяется как функция от расхода топлива, подаваемого контуром подачи, такое вхождение в резонанс может вызывать быстро развивающиеся колебания и создавать трудности управления и даже вызывать повреждения вплоть до полной потери полезной нагрузки и потери транспортного средства. Термин «эффект Пого» не является аббревиатурой, а назван так по аналогии с действием известной детской игрушки «пого стик/кузнечик», содержащей стойку с пружиной и предназначенной для прыжков, что напоминает техническим специалистам резкие продольные колебания ракеты, вызываемые этим эффектом. С самого начала разработки ракет на жидком топливе оказалось очень важным предпринимать меры по подавлению этого эффекта Пого. В контексте настоящего изобретения под «подавлением» имеется в виду как полное подавление, так и частичное снижение.
Специалистам в данной области известны два основных типа систем корректировки эффекта Пого: пассивные и активные системы. В пассивных системах резонансные частоты гидравлики изменяют таким образом, что они не могут совпадать с механическими резонансными частотами ракеты. Кроме того, они могут демпфироваться. Это осуществляется, например, путем установки гидравлических аккумуляторов в контуре подачи ракетного топлива. Обычно такой гидравлический аккумулятор образован находящимся под давлением объемом, содержащим газ и жидкость и сообщающимся с контуром подачи. Гидравлический аккумулятор функционирует по типу системы масса-пружина-демпфер, в которой массой является масса жидкости в аккумуляторе, пружина образована газом, а демпфирование обеспечивается вязкостью жидкости, входящей в аккумулятор и выходящей из него через дросселируемый трубопровод. Во французской патентной заявке FR 2499641 раскрыт пример выполнения такого гидравлического аккумулятора, который выполнен регулируемым для адаптации к различным ракетным двигателям. Однако изменение параметров сжимаемости и демпфирования аккумулятора не может управляться в ходе функционирования ракетного двигателя. Другой пассивный способ корректировки эффекта Пого состоит в изменении резонансной частоты гидравлики контура подачи топлива путем впрыска в него газа с постоянным расходом для изменения скорости звука в контуре. В противоположность этому в активных системах в контуре подачи создают обратные колебания давления-расхода, которые противодействуют колебаниям, измеренным в контуре.
Однако и пассивные и активные системы имеют недостатки. Пассивные системы не подходят в том случае, когда ракеты в ходе функционирования имеют большую варьируемость механических частот, поскольку они не демпфируют колебания за пределами узкой полосы частот, для которых они рассчитаны. В случае расхождения между прогнозируемой динамикой и реальной динамикой полета ракеты они не в состоянии корректировать их действие. Активные системы склонны давать только локальные положительные эффекты и также могут скорее оказывать негативные локальные или общие воздействия.
В японской патентной заявке JP 03-287-498 А предложена система корректировки эффекта Пого с помощью адаптивного гидравлического аккумулятора. В этом адаптивном гидравлическом аккумуляторе сжимаемость является изменяемой путем изменения давления газа, а демпфирование может изменяться с помощью устройства регулируемого ограничения потока. Однако это решение имеет ряд недостатков. Во-первых, изменение давления позволяет изменять сжимаемость в гидравлическом аккумуляторе только в очень узких пределах. Кроме того, хотя может обеспечиваться более широкое изменение демпфирования, устройство регулируемого ограничения содержит находящиеся в потоке топлива подвижные части, что может создавать проблемы безотказности, особенно если топливо является криогенным.
Раскрытие изобретения
Задачей настоящего изобретения является устранение указанных недостатков.
Решение поставленной задачи достигается за счет того, что система подачи топлива в соответствии с настоящим изобретением содержит, по меньшей мере, одно устройство изменения объема газа в контуре подачи, выполненное с возможностью изменения объема газа в контуре во время функционирования указанного ракетного двигателя.
В контексте настоящего описания под термином «изменение» имеется в виду последовательная модификация величины с получением множества различных величин непрерывным или дискретным образом. Таким образом, указанное устройство изменения объема газа позволяет последовательно получать множество различных объемов газа в контуре.
Благодаря такому решению можно изменять, по меньшей мере, одну частоту гидравлического резонанса контура в широком диапазоне частот в ходе функционирования ракетного двигателя и за счет этого избегать частот механического резонанса несущей конструкции, даже когда они также изменяются во время функционирования ракетного двигателя. Можно также легко адаптировать данный гидравлический контур подачи топлива ко множеству различных конструкций с различными частотами механического резонанса.
По меньшей мере, в одном примере осуществления изобретения указанное устройство изменения объема газа может содержать, по меньшей мере, один гидравлический аккумулятор с изменяемым уровнем жидкости. Помимо прочего такое устройство дает преимущество в том, что обеспечивает относительно простое средство изменения объема газа, а следовательно, сжимаемости и частоты гидравлического резонанса в контуре. В частности, указанный гидравлический аккумулятор может содержать точку подачи газа, соединение с трубопроводом указанного контура подачи ракетного топлива и расположенную между указанной точкой подачи газа и указанным соединением, по меньшей мере, одну погружную трубку, соединяющую указанный трубопровод с указанным изменяемым уровнем жидкости гидравлического аккумулятора.
В первом варианте гидравлический аккумулятор содержит множество погружных трубок, каждая из которых содержит соответствующий клапан и соединяет указанный трубопровод с соответствующим определенным уровнем жидкости. Путем открытия и закрытия клапанов можно уравнивать давление свободной поверхности жидкости и давление в трубопроводе на различных уровнях. При этом можно весьма значительно изменять объем газа в гидравлическом аккумуляторе и тем самым изменять сжимаемость гидравлического аккумулятора и, по меньшей мере, одну частоту гидравлического резонанса контура.
Во втором варианте, по меньшей мере, одна погружная трубка выполнена с возможностью перемещения для изменения уровня жидкости, с которым она соединяет трубопровод. При этом можно получать бесступенчатое изменение, по меньшей мере, одной частоты гидравлического резонанса.
По меньшей мере, в одном другом примере осуществления указанное устройство изменения объема газа может преимущественно содержать, по меньшей мере, один инжектор газа с изменяемым расходом. Это решение также дает преимущество в том, что обеспечивает средство изменения, по меньшей мере, одной частоты гидравлического резонанса, при этом сложность устройства ненамного превышает сложность устройств пассивных систем предшествующего уровня техники.
Преимущественно, система подачи топлива дополнительно содержит блок управления указанным устройством изменения объема газа. Этот блок управления позволяет связывать команду на изменение объема газа с такими параметрами, как установленная частота механического резонанса, время с момента запуска ракетного двигателя и другие.
Еще более преимущественно, система подачи топлива дополнительно содержит, по меньшей мере, один датчик, соединенный с указанным блоком управления, при этом блок управления выполнен с возможностью регулировать изменение объема газа как функцию от сигналов, воспринятых указанным датчиком. В частности, этот, по меньшей мере, один датчик может содержать акселерометр, что позволяет выявлять механические колебания и/или определять, по меньшей мере, одну частоту механического резонанса и/или ее изменение. Этот, по меньшей мере, один датчик может также содержать датчик давления ракетного топлива, что обеспечивает возможность определения, по меньшей мере, одной частоты гидравлического резонанса контура подачи топлива и/или ее изменения. Благодаря этому решению можно детектировать приближение, по меньшей мере, одной частоты механического резонанса к, по меньшей мере, одной частоте гидравлического резонанса и изменять последнюю во избежание эффекта Пого.
По меньшей мере, в одном другом примере осуществления указанный блок управления выполнен с возможностью регулировать изменение объема газа как функцию от времени. При этом в том случае, когда заранее известен характер изменения в функции от времени, по меньшей мере, одной частоты механического резонанса конструкции, соединенной с контуром подачи топлива, например, из предварительных испытаний и/или из моделирования или вычислений, можно программировать изменение, по меньшей мере, одной частоты гидравлического резонанса в функции времени, чтобы избегать совпадения резонансных частот, а следовательно, и эффекта Пого во время функционирования ракетного двигателя.
Хотя обе указанные возможности могут рассматриваться как альтернативы, можно также их комбинировать, например, при помощи базового заданного значения как функции от времени и фактора корректировки в функции сигналов, регистрируемых датчиком.
Настоящее изобретение относится также к транспортному средству, содержащему, по меньшей мере, один ракетный двигатель с, по меньшей мере, одним жидким ракетным топливом и с системой подачи топлива согласно изобретению. В контексте настоящего описания, термин «транспортное средство» следует понимать в самом широком смысле. Так, изобретение может использоваться в космических одноступенчатых или многоступенчатых ракетах-носителях, в отдельных ступенях таких космических ракет-носителей или в космических снарядах, таких как спутники, зонды, капсулы или челночные аппараты, а также в управляемых и неуправляемых одноступенчатых и многоступенчатых ракетных снарядах или в отдельных ступенях таких ракетных снарядов. Во всех случаях изобретение обеспечивает преимущество, выраженное в большей надежности транспортного средства для сохранения его полезной нагрузки вплоть до пункта назначения.
Настоящее изобретение относится также к способу подавления эффекта Пого, в котором объем газа в контуре подачи системы для подачи в ракетный двигатель, по меньшей мере, одного жидкого ракетного топлива изменяют в ходе функционирования указанного ракетного двигателя таким образом, что управляют расхождением между, по меньшей мере, одной частотой гидравлического резонанса контура подачи и, по меньшей мере, одной частотой механического резонанса конструкции, соединенной с указанным контуром подачи.
При этом изменение сжимаемости газо-жидкостной текучей среды, содержащейся в контуре подачи, позволяет изменять в широком диапазоне, по меньшей мере, одну частоту гидравлического резонанса. За счет этого можно избегать вхождения в резонанс гидравлической и механической систем, вызывающего эффект Пого.
По меньшей мере, в одном примере осуществления указанный объем газа изменяют таким образом, что выдерживают указанное расхождение выше заранее заданного порога. За счет этого получают коэффициент безопасности, соответствующий порогу.
Однако в том случае, когда имеется множество частот гидравлического резонанса и/или множество частот механического резонанса, может быть целесообразно изменять, по меньшей мере, одну частоту гидравлического резонанса таким образом, чтобы максимизировать функцию, по меньшей мере, одного расхождения между частотой гидравлического резонанса контура подачи и частотой механического резонанса конструкции. В частности, если эта функция является функцией множества расхождений, каждая из которых соответствует различной паре частот, соответственно, гидравлического резонанса и механического резонанса, эта функция может быть весовой функцией с индивидуальным коэффициентом для каждой пары.
Изменяемый объем газа может, по меньшей мере, частично находиться в гидравлическом аккумуляторе, соединенном с трубопроводом указанного контура подачи, так что изменение объема газа заключается в изменении объема газа в аккумуляторе. Оно может также осуществляться посредством изменения расхода, с которым газ впрыскивают в, по меньшей мере, одно ракетное топливо в указанном контуре подачи. При этом взвешенные в ракетном топливе пузырьки газа обеспечивают изменяемую степень сжимаемости газо-жидкостной текучей среды, содержащейся в контуре подачи, что выражается в изменении скорости звука в контуре подачи и указанной частоты гидравлического резонанса.
Преимущественно, объем газа может быть изменен как функция от времени и/или функция, по меньшей мере, от одной величины механических колебаний, воспринятых от указанной конструкции, в частности, механического колебания, для которого выполняют спектральный анализ для определения, по меньшей мере, одной частоты механического резонанса этой конструкции. Еще более предпочтительно, по меньшей мере, для одного воспринятого механического колебания используют алгоритм фильтрации, например, такой как ансцентный фильтр Калмана, для определения, по меньшей мере, одной частоты механического резонанса и/или для прогнозирования его будущего изменения, что позволяет легче избегать совпадения, по меньшей мере, одной частоты механического резонанса с, по меньшей мере, одной частотой гидравлического резонанса.
Настоящее изобретение относится также к средствам обеспечения компьютерных данных, содержащим инструкции для выполнения на ЭВМ для осуществления способа подавления эффекта Пого в соответствии с изобретением. Под «средствами обеспечения компьютерных данных» имеется в виду любая поддержка, обеспечивающая возможность долговременного и/или временного запоминания данных и их последующего чтения вычислительной системой. Таким образом, под «средствами обеспечения компьютерных данных» имеются в виду, кроме прочего, магнитные ленты, магнитные и/или оптические диски и твердотельные электронные запоминающие устройства, как энергозависимые, так и энергонезависимые.
Таким образом, настоящее изобретение может быть выражено также в виде ЭВМ, запрограммированной для осуществления способа подавления эффекта Пого в соответствии с изобретением или даже в виде программного обеспечения для осуществления с помощью ЭВМ способа подавления эффекта Пого в соответствии с изобретением.
Краткое описание графических материалов
Далее объяснение изобретения и его преимуществ будет дано в последующем подробном описании не имеющих ограничительного характера вариантов осуществления изобретения. Описание ссылается на прилагаемые чертежи, на которых:
фиг.1 изображает образованную электрическими аналогами гидравлических средств схему транспортного средства с ракетным двигателем и систему подачи жидкого топлива согласно одному примеру осуществления изобретения;
фиг.2А и 2В изображают в поперечном разрезе аккумулятор изменяемого объема, встроенный в ответвлении системы подачи топлива по фиг.1;
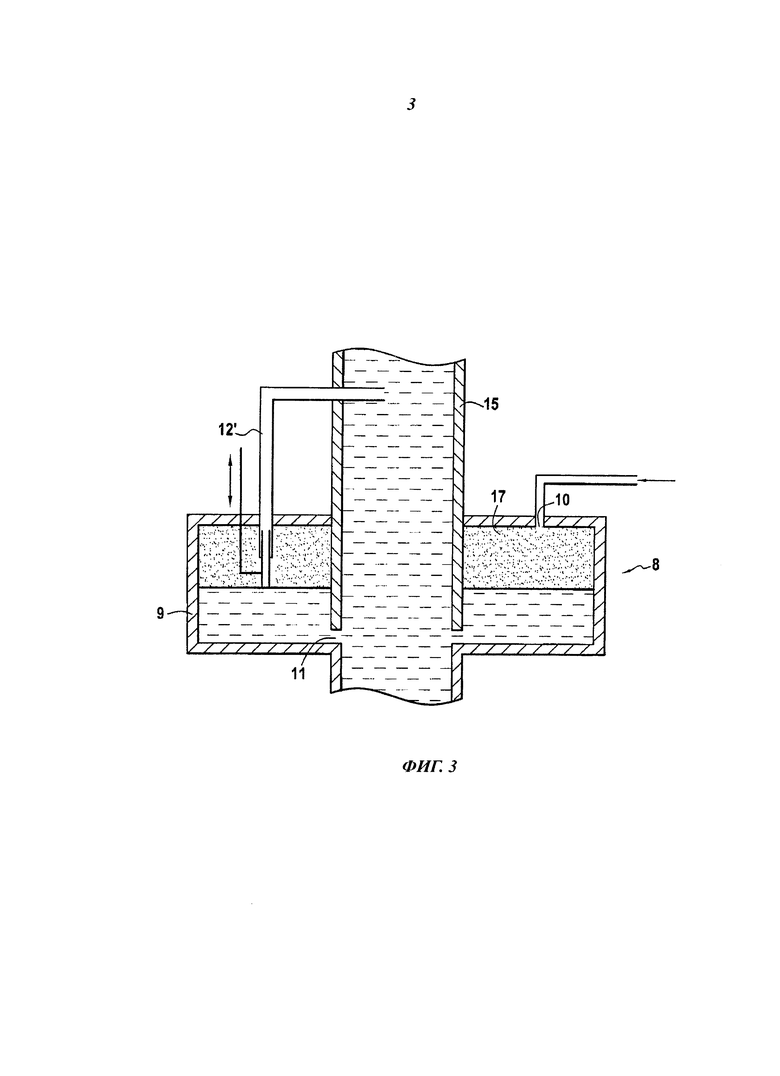
фиг.3 изображает в поперечном разрезе аккумулятор изменяемого объема во втором примере осуществления изобретения;
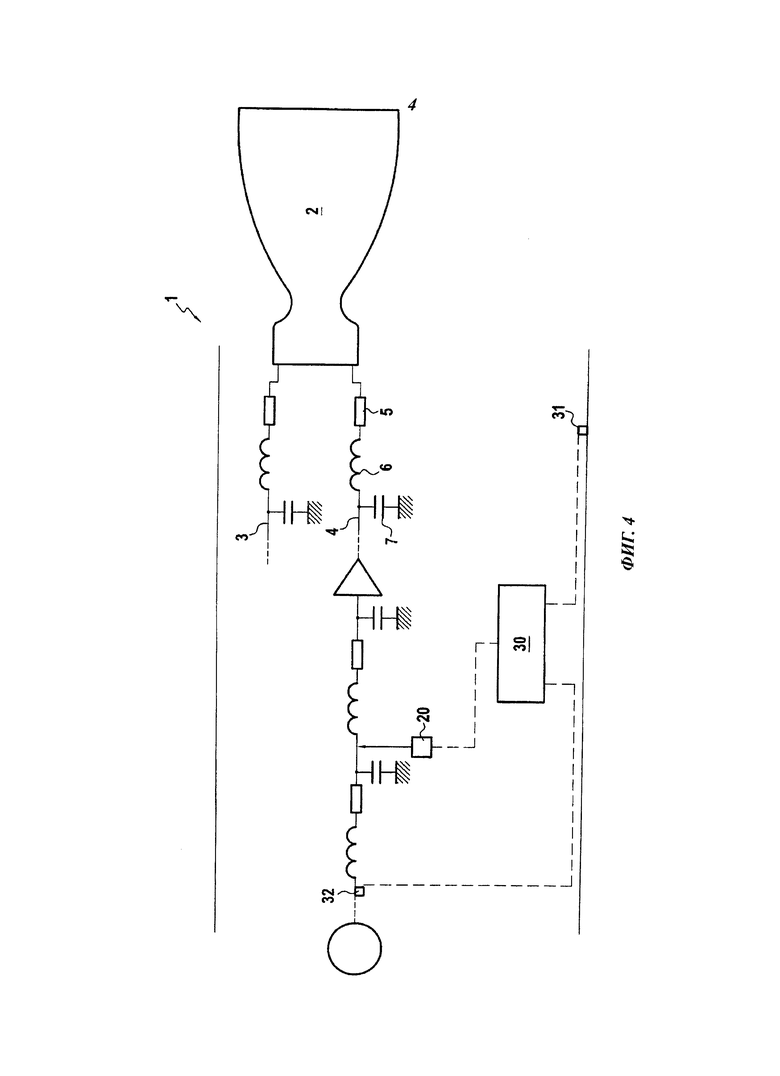
фиг.4 изображает образованную электрическими аналогами гидравлических средств схему ракетного двигателя с контуром подачи жидкого топлива согласно третьему примеру осуществления изобретения;
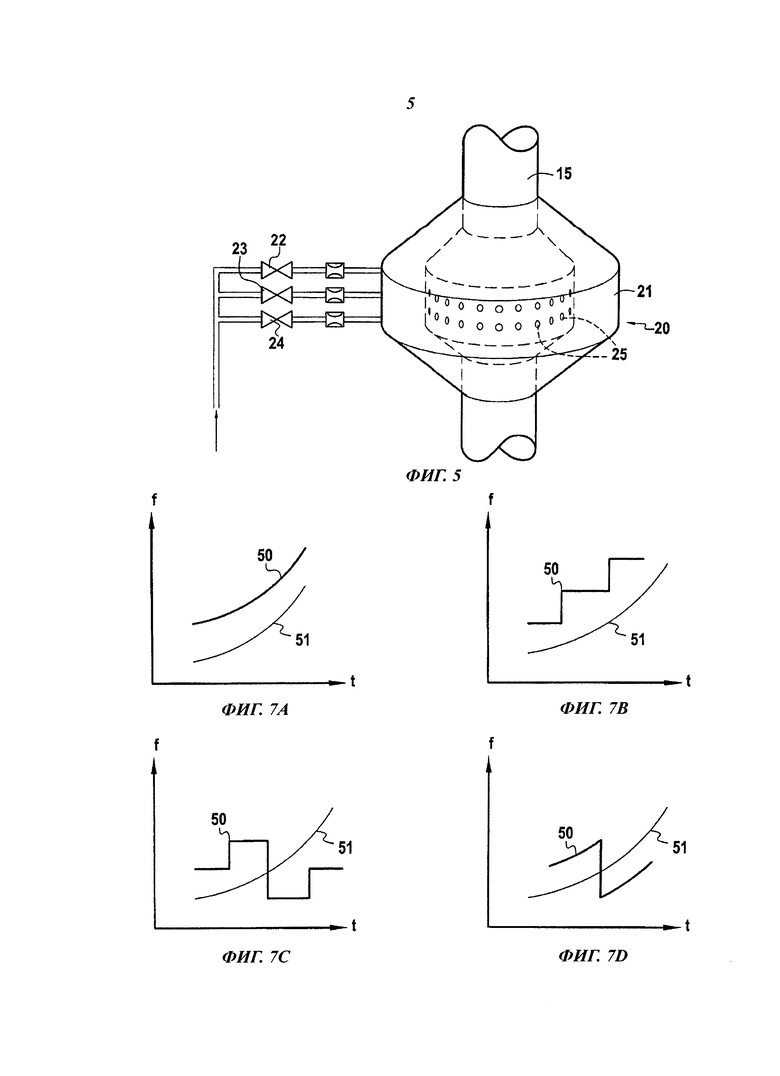
фиг.5 схематично изображает точку инжекции газа, подсоединенную к контуру по фиг.4;
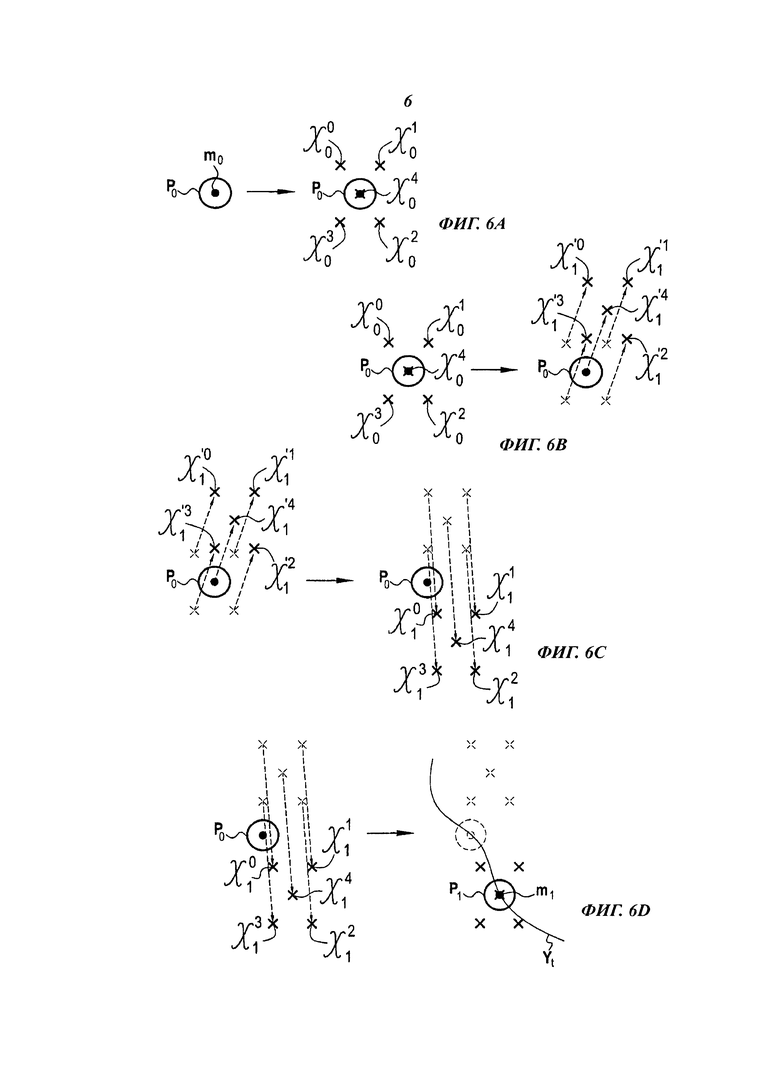
фиг.6А, 6В, 6С и 6D схематично изображают функционирование ансцентного алгоритма фильтрации Калмана; и
фиг.7А, 7В, 7С и 7D изображают графики трех возможных вариантов изменения частоты гидравлического резонанса контура подачи в функции изменения частоты механического резонанса транспортного средства по фиг.1.
Сведения, подтверждающие возможность осуществления изобретения
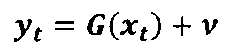
Показанное на фиг.1 транспортное средство 1 содержит камеру 2 тяги, включающую в себя камеру сгорания и сопло с сужением и диффузором. Транспортное средство 1 содержит также контур 3, 4 подачи для каждого из двух химически активных друг с другом видов жидкого топлива, подаваемых в камеру 2 тяги. Первый контур 3 подачи показан лишь частично. Каждый заполненный текучей средой контур 3, 4 подачи представляет собой динамическую систему, которая может быть представлена моделью в виде электрического контура, содержащего сопротивления 5, катушки 6 индуктивности и конденсаторы 7, и имеет, по меньшей мере, одну частоту резонанса.
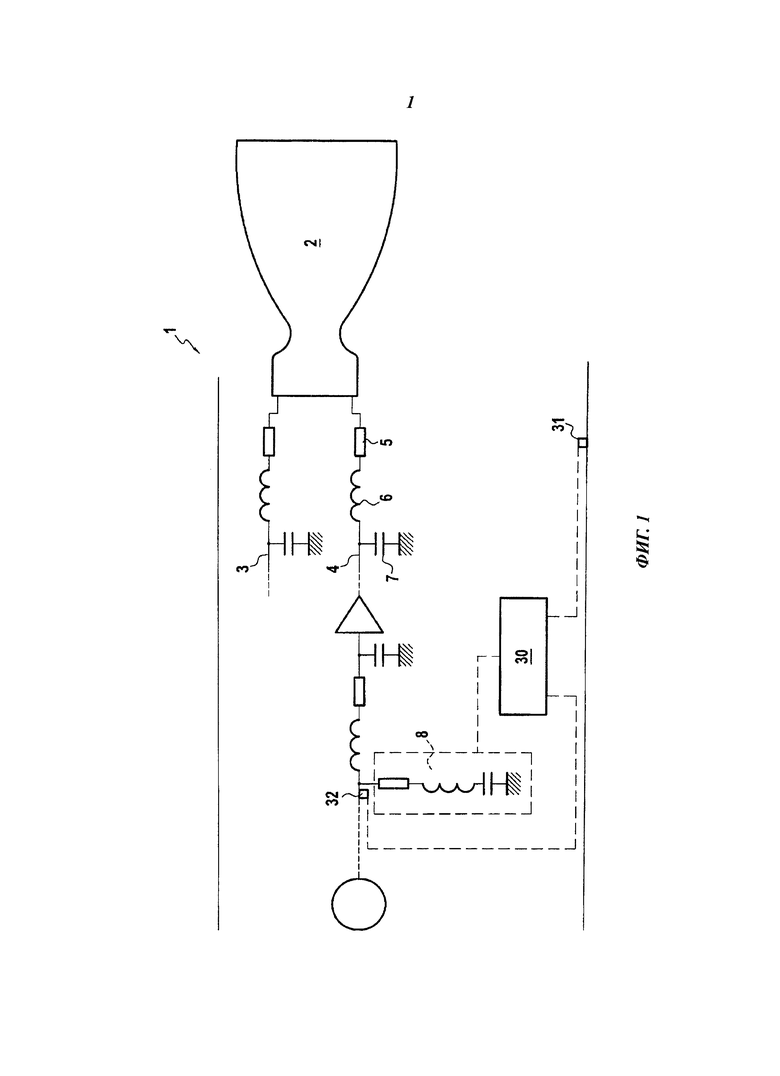
Для изменения, по меньшей мере, одной частоты резонанса второго контура 4 подачи он содержит в своем ответвлении гидравлический аккумулятор 8 с изменяемым объемом газа, а следовательно, с изменяемой сжимаемостью. Аккумулятор 8, показанный на фиг.2А и 2В, содержит резервуар 9 с расположенной на одной стороне точкой 10 подачи газа под давлением и расположенным на противоположной стороне соединением 11 с трубопроводом 15 второго контура 4 подачи. Погружные трубки 12, 13 соединяют резервуар 9 с трубопроводом 15 на различных уровнях между точкой 10 и соединением 11. В каждой погружной трубке 12, 13 между резервуаром 9 и трубопроводом 15 встроен соответствующий клапан 14 и 16. Таким образом, открытие и закрытие клапанов 14, 16 позволяет изменять уровень жидкости, а следовательно, и объем 17 газа в резервуаре 9, как это показано на фиг.2А и 2В. На фиг.2А клапан 14 более короткой погружной трубки 12 открыт, а клапан 16 погружной трубки 13 закрыт. При этом свободная поверхность жидкости стабилизирована на уровне входа погружной трубки 12, и объем 17 газа и сжимаемость остаются относительно ограниченными. На фиг.2В наоборот, клапан 14 погружной трубки 12 закрыт, а клапан 16 погружной трубки 13 открыт. При этом свободная поверхность жидкости стабилизирована на более низком уровне входа погружной трубки 13, так что в результате объем 17 газа и сжимаемость соответственно увеличены.
При этом путем изменения эффективной сжимаемости аккумулятора 8 становится возможным даже в ходе функционирования ракетного двигателя транспортного средства 1 адаптировать частоту гидравлического резонанса второго контура 4 подачи таким образом, чтобы устранять ее совпадение с переменной частотой механического резонанса несущей конструкции ракетного двигателя. Само собой разумеется, что для такого результата необходимо обеспечить значительное ускорение для разделения более тяжелой жидкости и более легкого газа. Этот гидравлический аккумулятор 8 с регулируемым объемом газа не будет функционировать таким же образом в условиях малой гравитации.
Во втором примере осуществления, показанном на фиг.3, аккумулятор 8 также содержит резервуар 9 с точкой 10 подачи газа под давлением на одной стороне и соединением 11 с трубопроводом 15 второго контура 4 подачи на противоположной стороне; но здесь предусмотрена только одна погружная трубка 12′, которая выполнена с возможностью перемещения в направлении глубины резервуара 9 для изменения уровня жидкости, а следовательно, и объема 17 газа в резервуаре 9. Этот пример выполнения позволяет бесступенчатым образом изменять уровень жидкости, а следовательно, и объем газа, сжимаемость в аккумуляторе 8 и частоту гидравлического резонанса второго контура 4 подачи топлива.
Третий пример осуществления показан на фиг.4. Как и в примере осуществления по фиг.1, в этом примере транспортное средство 1 также содержит систему подачи топлива с контуром 3, 4 подачи для каждого из двух химически активных друг с другом видов жидкого топлива, подаваемых в камеру 2 тяги.
Однако в этом третьем примере осуществления, по меньшей мере, одну частоту гидравлического резонанса второго контура 4 подачи изменяют путем впрыска изменяемого объема газа в текучую среду контура 4 подачи с помощью устройства 20 инжекции газа, соединенного со вторым контуром 4 подачи. Ниже по потоку точки 20 инжекции сжимаемость газо-жидкостной текучей среды в контуре модифицируется посредством сжимаемости объема впрыснутого газа. Вследствие этого изменяются также, по меньшей мере, одна частота гидравлического резонанса контура 4 подачи и скорость звука в контуре 4 подачи.
Устройство 20 инжекции газа показано на фиг.5. Оно установлено таким образом, что окружает трубопровод 15 второго контура 4 подачи и содержит окружающую трубопровод 15 кольцевую полость 21, которая соединена с источником газа под давлением (не показан) через три клапана 22, 23, 24 и сообщается с трубопроводом 15 через инжекционные отверстия 25. При этом расход, с которым газ впрыскивают в трубопровод 15, а следовательно, во второй контур подачи, может быть изменен посредством открытия и закрытия клапанов 22, 23, 24. Альтернативно или дополнительно к этому решению такое устройство инжекции газа может содержать регулируемый клапан или регулятор расхода потока текучей среды, позволяющий получать бесступенчатое изменение объемного расхода газа, впрыскиваемого в трубопровод 15, а следовательно, и, по меньшей мере, одной частоты гидравлического резонанса.
Как гидравлический аккумулятор 8 с изменяемым объемом газа по первому примеру осуществления, так и устройство 20 инжекции газа с изменяемым расходом по второму примеру осуществления могут быть связаны с блоком 30 управления для их управления путем подачи изменяемого заданного значения от блока управления на гидравлический аккумулятор 8 и/или устройство 20 инжекции газа. Если изменение частоты механического резонанса известно заранее из моделирования и/или из предшествующих опытов, указанное заданное значение может быть предварительно запрограммировано просто как функция времени. Однако возможно также и в некоторых случаях даже предпочтительно, чтобы заданное значение изменялось в ответ на получаемые сигналы в режиме реального времени или почти реального времени. Так, например, как это показано на фиг.1 или 3, транспортное средство 1 может быть оснащено, по меньшей мере, одним акселерометром 31 и датчиком 32 давления топлива в контуре 4. Акселерометр 31 соединен с блоком 30 управления для передачи ему сигналов, представляющих механические свойства конструкции транспортного средства 1, а датчик 32 давления, также соединенный с блоком 30 управления, передает на него сигналы, представляющие гидравлические свойства контура 4.
Эти сигналы обрабатываются в блоке 30 управления для извлечения из них методом спектрального анализа частот механического резонанса и гидравлического резонанса. Алгоритмы фильтрации, такие как, например, ансцентный фильтр Калмана, описанный в докладе «Ансцентный фильтр Калмана для нелинейной оценки», Известия симпозиума 2000 по адаптивным системам для обработки сигналов, связи и управления (от англ. AS-SPCC), IEEE, Lake Louise, Alberta, Канада, октябрь 2000 г., могут использоваться не только для фильтрации шума сигналов, но даже в режиме прогноза для краткосрочного прогнозирования изменения частот резонанса режимов колебаний и их предвидения в ходе управления частотой гидравлического резонанса. Блок управления может быть запрограммирован на инициацию такого алгоритма фильтрации при приближении к ожидаемой частоте механического резонанса, тем самым обеспечивая возможность по существу отслеживать указанную частоту в ходе полета.
В динамической системе, такой как транспортное средство 1, можно принять, что существует последовательность Маркова латентных состояний xt, изменяющихся во времени в функции F. Эти латентные состояния косвенным путем наблюдаются датчиками, указывающими измеренные состояния yt через функцию G измерения. При этом xt и yt могут быть выражены формулами:
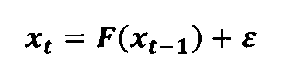
Величины ε и v представляют соответственно собственный шум системы и шум измерения, и обе следуют гауссовому распределению.
Задачей алгоритма фильтрации является заключение о состоянии динамической системы по измеренным датчиками величинам с их шумами. Система Калмана обеспечивает быструю и точную оценку для линейных систем. Однако он не является непосредственно применимым к нелинейным системам, в качестве которой потенциально может классифицироваться настоящий случай. Среди известных альтернатив адаптации алгоритма фильтрации Калмана к нелинейным системам известен, в частности, ансцентный фильтр Калмана (от англ. UKF, unscented Kalman filter). Этот алгоритм распространяет насколько оценок xt через функции F и G и реконструирует гауссово распределение, исходя из того, что распространенные величины происходят из линейной системы. Положения оценок xt называются «сигма точками сигма» и вычисляются из исходных значений среднего и дисперсии со схемой аппроксимации, называемой ансцентным преобразованием.
На фиг.6А показан первый этап, на котором вычислены исходные точки сигма 



















В блоке управления частоты механического резонанса и гидравлического резонанса сравниваются и, например, если их расхождение приближается или достигает определенного порога, блок 30 управления изменяет заданное значение, передаваемое на аккумулятор 8 и/или на устройство 20 инжекции газа.
На фиг.7А, 7В, 7С и 7D показаны четыре примера управления частотой 50 гидравлического резонанса в качестве реакции на повышающуюся частоту 51 механического резонанса. В первом примере, показанном на фиг.7А, частота 50 гидравлического резонанса может изменяться бесступенчато для поддержания постоянного расхождения с частотой 51 механического резонанса. Во втором примере по фиг.7В частота 50 гидравлического резонанса изменяется ступенчатым образом, чтобы расхождение между двумя частотами 50 и 51 было не меньше заданного порога. Может случаться, что частота 50 гидравлического резонанса не может изменяться в таком же широком диапазоне, как частота 51 механического резонанса. В этом случае можно так же, как это показано на фиг.7С, вызывать почти мгновенное изменение частоты 50 гидравлического резонанса, по существу более высокой, чем частота 51 механического резонанса, на частоту 50 гидравлического резонанса, по существу более низкую, чем частота 51 механического резонанса (или наоборот). Единичное мгновенное совпадение частот резонанса не приведет к развитию опасного резонанса. И наконец, возможно также комбинировать постепенные изменения частоты 50 гидравлического резонанса с резкими изменениями, как это показано на фиг.7D.
Несущая конструкция ракетного двигателя может также иметь множество переменных частот механического резонанса, так же, как и каждый контур подачи топлива может иметь множество частот гидравлического резонанса. В этом случае может быть неадекватным управление объемом газа в контуре подачи, просто предназначенное для поддерживания расхождения между частотой гидравлического резонанса и частотой механического резонанса выше заранее заданного порога. По меньшей мере, в одном альтернативном решении объем газа может регулироваться таким образом, чтобы приводить к максимуму функцию расхождений во множестве пар, соответственно, частоты гидравлического резонанса контура подачи и частоты механического резонанса конструкции.
Так, в первом примере, в котором контур подачи топлива имеет две переменные частоты гидравлического резонанса, из которых одна частота гидравлического резонанса является верхней частотой fh,high и другая является нижней частотой fh,low, конструкция имеет одну переменную частоту fs механического резонанса, подлежащая максимизации функция Ropt может следовать уравнению:

Этой функцией может быть весовая функция с одним или более весовыми коэффициентами. Так, во втором примере, в котором контур подачи топлива имеет две переменные частоты гидравлического резонанса, из которых одна частота гидравлического резонанса является верхней частотой fh,high и другая является нижней частотой fh,low, а конструкция имеет два режима механического резонанса с частотой fs,1 механического резонанса в первом режиме и частотой fs,2 механического резонанса во втором режиме, подлежащая максимизации функция Ropt может следовать уравнениям:



где х1,2 представляет весовой коэффициент второго режима механического резонанса конструкции.
Хотя настоящее изобретение было описано со ссылками на конкретные примеры осуществления, очевидно, что в рамках общего объема изобретения, определенного пунктами формулы изобретения, возможны другие модификации и изменения. В частности, индивидуальные характеристики различных показанных примеров осуществления могут быть скомбинированы в дополнительных примерах осуществления. Соответственно, описание и чертежи должны рассматриваться в качестве иллюстрации и не носят ограничительного характера.
Изобретение относится к жидкостным ракетным двигателям. Система подачи топлива в ракетном двигателе, содержащая контур (4) подачи топлива, дополнительно содержит устройство изменения объема газа в контуре (4), выполненное с возможностью изменения объема газа в контуре во время функционирования ракетного двигателя. Рассмотрены также способ подавления эффекта Пого посредством изменения по меньшей мере одной частоты (50) гидравлического резонанса путем изменения расхода впрыска газа в контур (4), транспортное средство и машиночитаемый носитель информации. Изобретение обеспечивает подавление процесса вхождения в резонанс жидкого топлива в контуре подачи топлива в ракетном двигателе. 4 н. и 17 з.п. ф-лы, 14 ил.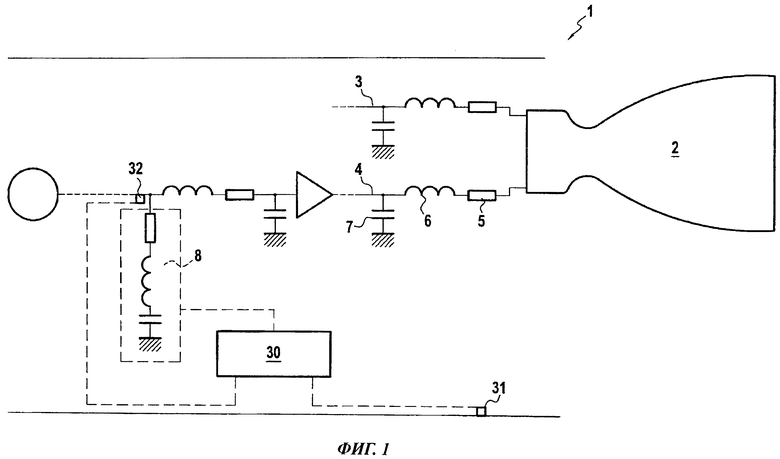
1. Система подачи для подачи в ракетный двигатель по меньшей мере одного жидкого ракетного топлива, содержащая по меньшей мере один контур (4) подачи, отличающаяся тем, что дополнительно содержит по меньшей мере одно устройство изменения объема газа в контуре (4), выполненное с возможностью изменения объема газа в контуре во время функционирования указанного ракетного двигателя.
2. Система подачи по п.1, отличающаяся тем, что указанное устройство изменения объема газа содержит по меньшей мере один гидравлический аккумулятор (8) с изменяемым уровнем жидкости.
3. Система подачи по п.2, отличающаяся тем, что указанный гидравлический аккумулятор (8) содержит точку (10) подачи газа, соединение (11) с трубопроводом (15) указанного контура (4) подачи ракетного топлива и расположенную между точкой (10) подачи газа и соединением (11) по меньшей мере одну погружную трубку (12, 13; 12′), соединяющую указанный трубопровод (15) с указанным изменяемым уровнем гидравлического аккумулятора (8).
4. Система подачи по п.3, отличающаяся тем, что указанный гидравлический аккумулятор (8) содержит множество погружных трубок (12, 13), каждая из которых содержит соответствующий клапан (14, 16) и соединяет указанный трубопровод (15) с соответствующим определенным уровнем жидкости.
5. Система подачи по п.3, отличающаяся тем, что по меньшей мере одна погружная трубка (12′) выполнена с возможностью перемещения для изменения уровня жидкости, с которым она соединяет трубопровод (15).
6. Система подачи по п.1, отличающаяся тем, что указанное устройство изменения объема газа содержит по меньшей мере один инжектор (20) газа с изменяемым расходом.
7. Система подачи по п.1, отличающаяся тем, что дополнительно содержит блок (30) управления указанным устройством изменения объема газа.
8. Система подачи по п.7, отличающаяся тем, что дополнительно содержит по меньшей мере один датчик, соединенный с указанным блоком (30) управления, при этом блок (30) управления выполнен с возможностью регулировать изменение объема газа как функцию от сигналов, воспринятых указанным по меньшей мере одним датчиком.
9. Система подачи по п.8, отличающаяся тем, что указанный по меньшей мере один датчик содержит акселерометр (31).
10. Система подачи по п.8 или 9, отличающаяся тем, что указанный по меньшей мере один датчик содержит датчик (32) давления ракетного топлива.
11. Система подачи (4) по п.7, отличающаяся тем, что указанный блок (30) управления выполнен с возможностью регулировать изменение объема газа как функцию времени.
12. Транспортное средство (1), содержащее по меньшей мере один ракетный двигатель с по меньшей мере одним жидким ракетным топливом и с системой (4) подачи топлива по любому из пп.1-11.
13. Способ подавления эффекта Пого, характеризующийся тем, что объем газа в контуре (4) подачи системы для подачи в ракетный двигатель по меньшей мере одного жидкого ракетного топлива изменяют в ходе функционирования указанного ракетного двигателя таким образом, что управляют расхождением между по меньшей мере одной частотой (50) гидравлического резонанса контура (4) подачи и по меньшей мере одной частотой (51) механического резонанса конструкции, соединенной с указанным контуром подачи.
14. Способ подавления эффекта Пого по п.13, отличающийся тем, что указанный объем газа изменяют таким образом, что выдерживают указанное расхождение выше заранее заданного порога.
15. Способ подавления эффекта Пого по п.13, отличающийся тем, что указанный объем газа изменяют таким образом, что максимизируют функцию по меньшей мере одного расхождения между частотой (50) гидравлического резонанса контура (4) подачи и частотой (51) механического резонанса конструкции.
16. Способ подавления эффекта Пого по п.13, отличающийся тем, что указанный изменяемый объем газа по меньшей мере частично находится в гидравлическом аккумуляторе (8), соединенном с трубопроводом (15) указанного контура (4) подачи.
17. Способ подавления эффекта Пого по п.13, отличающийся тем, что указанный объем газа изменяют посредством изменения расхода впрыска газа в по меньшей мере одно ракетное топливо в указанном контуре (4) подачи.
18. Способ подавления эффекта Пого по п.13, отличающийся тем, что указанный объем газа изменяют как функцию по меньшей мере от одной величины механических колебаний, воспринятых от указанной конструкции.
19. Способ подавления эффекта Пого по п.18, отличающийся тем, что выполняют спектральный анализ по меньшей мере одного механического колебания для определения по меньшей мере одной частоты (51) механического резонанса конструкции.
20. Способ подавления эффекта Пого по п.19, отличающийся тем, что по меньшей мере для одного воспринятого механического колебания используют алгоритм фильтрации, например ансцентный фильтр Калмана, для определения по меньшей мере одной частоты (51) механического резонанса и/или для прогнозирования ее будущего изменения.
21.Машиночитаемый носитель информации, содержащий инструкции для осуществления способа подавления эффекта Пого по любому из пп.13-20.
| СПОСОБ ПРОКАТКИ МЕТАЛЛИЧЕСКИХ ПОЛОС | 2012 |
|
RU2499641C1 |
| JP 3287498 A, 18.12.1991 | |||
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ПОДТВЕРЖДЕНИЯ АМПЛИТУДНО-ФАЗОВЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2009 |
|
RU2406858C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОЙ РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2000 |
|
RU2180704C2 |
| СИСТЕМА НАДДУВА ТОПЛИВНЫХ БАКОВ | 2006 |
|
RU2339835C2 |

