Настоящее изобретение относится к способу управления системой привода с переменной скоростью, содержащей электрический двигатель. В другом своем аспекте настоящее изобретение относится к системе привода с переменной скоростью, содержащей электрический двигатель. В других аспектах изобретение относится к способу охлаждения потока углеводородов, с использованием системы привода с переменной скоростью или способа управления указанной системой.
Природный газ является примером углеводородов, которые в виде потока поступающего материала в промышленности часто требуется охлаждать, например для производства сжиженного природного газа (СПГ, LNG - liquefied natural gas). Природный газ является удобным источником топлива, а также источником различных соединений углеводородов. Часто желательно сжижать природный газ на заводе СПГ непосредственно у источника потока природного газа или недалеко от него. СПГ удобно хранить и транспортировать в виде налива.
Многие заводы СПГ используют один или более компрессоров в холодильном цикле, в котором хладагент циклически сжимается в холодильном контуре. Эти компрессоры являются нагрузками, которые традиционно приводятся в движение напрямую с помощью первичных двигателей, таких как паровая турбина и/или газовая турбина, в некоторых случаях используется вспомогательный электрический двигатель для поддержки турбин и запуска цикла. Однако существует растущий интерес к полностью электрическим (только с электрическим приводом) циклам машинного охлаждения, где компрессоры приводятся в движение от вала первичного двигателя, представляющего собой только электрический двигатель. Такой двигатель может входить в состав системы привода с переменной скоростью.
Известно, что в узлах валов в цепочке первичных двигателей и нагрузок могут возникать трудно подавляемые механические резонансы. Эти механические резонансы часто называют «крутильными колебаниями» или «резонансом крутильных колебаний». Частота такого резонанса крутильных колебаний может падать ниже синхронной частоты сети. Крутящий момент, связанный с крутильными резонансными колебаниями, может быть достаточно большим, чтобы вызвать механическое повреждение. Также известно, что такие крутильные резонансные колебания могут возбуждаться интергармоническими составляющими тока, которые генерируются в силовой электронике, используемой для питания электрического двигателя.
В прошлом предлагались различные решения в отношении риска возникновения крутильных резонансных колебаний. Например в патентном документе US 7,173,399 описана система демпфирования крутильных колебаний, включающая в себя систему инвертора с естественной коммутацией, содержащая: выпрямитель, линию постоянного тока и инвертор нагрузки; датчик, выполненный с возможностью измерения сигнала, представляющего крутящий момент на валу со стороны нагрузки; и контроллер инвертора, использующий измеренный сигнал для обнаружения крутильных колебаний на валу со стороны нагрузки, выполненный с возможностью генерации управляющих сигналов инвертора для подавления крутильных колебаний путем модулирования мгновенной мощности через инвертор нагрузки.
Недостатком системы, описанной в этом патентном документе, является то, что ей необходим датчик для измерения крутящего момента на валу со стороны нагрузки.
В соответствии с первым аспектом настоящего изобретения, создан способ управления системой привода с переменной скоростью, содержащей электрический двигатель и частотным преобразователь, расположенный между источником питания переменного тока и электрическим двигателем, содержащий следующие этапы:
- преобразование питания переменного тока, получаемого из источника питания переменного тока с частотой источника, в преобразованное питание с переменной частотой привода, которое не равно частоте источника, при этом преобразованное питание содержит интергармонические токи, имеющие дополнительные частотные компоненты на интергармонических частотах, которые являются частотами, некратными частоте источника с коэффициентом равным целому числу;
- подача в электрический двигатель преобразованного питания;
- приведение в движение механического узла, содержащего по меньшей мере приводной вал и механическую нагрузку, электрическим двигателем;
- возбуждение колебаний в интергармонических частотах независимо от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока,
В другом аспекте изобретения создана система привода с переменной скоростью, содержащая:
- электрический двигатель;
- частотный преобразователь, расположенный между источником питания переменного тока и электрическим двигателем, предназначенный для преобразовывания питания переменного тока, полученного из источника питания переменного тока с частотой источника в преобразованное питание с переменной частотой привода, которая не равна частоте источника;
- механический узел, соединенный с электрическим двигателем, содержащий, по меньшей мере, приводной вал и механическую нагрузку; и
- схему электрической модуляции, взаимодействующую с частотным преобразователем и выполненную с возможностью вызывать колебания в интергармонических частотах интергармонических токов, генерируемых в частотном преобразователе, независимо от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока.
В еще одном аспекте изобретения создан способ охлаждения потока углеводородов, содержащий следующие этапы:
- управление системой привода с переменной скоростью в соответствии с описанным выше способом, при этом механическая нагрузка содержит компрессор;
- циклическое сжатие хладагента - компрессором и охлаждение потока углеводородов путем теплообмена между потоком углеводородов и хладагентом.
Изобретение более подробно описано ниже, с использованием примеров и ссылок на чертежи, на которых:
фиг. 1 - схема системы привода с переменной скоростью, присоединенной к источнику питания переменного тока и механической нагрузке;
фиг. 2 - схема частотного преобразователя, который может использоваться в системе, представленной на фиг. 1;
фиг. 3 - схема инвертора с естественной коммутацией, который может входить в состав частотного преобразователя, представленного на фиг. 2;
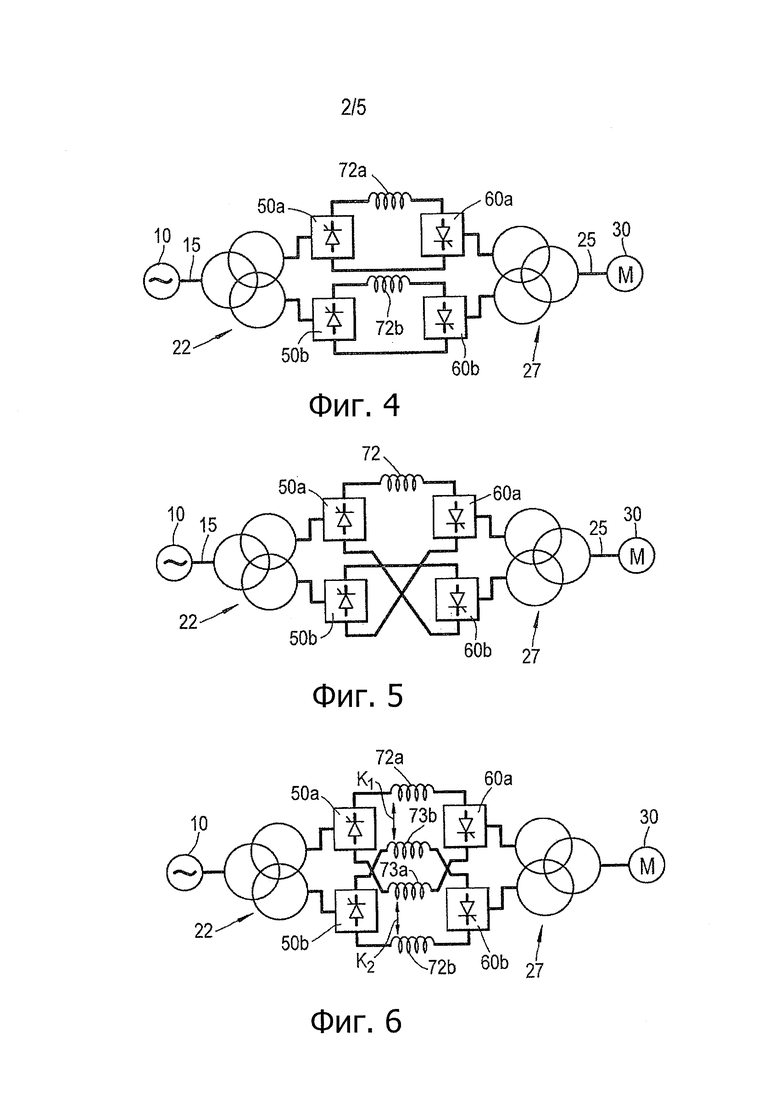
фиг. 4 - схема инвертора с естественной коммутацией с трансформаторами, который может входить в состав частотного преобразователя на фиг. 2;
фиг. 5 - схема инвертора с естественной коммутацией с трансформаторами, который может входить в состав частотного преобразователя на фиг. 2;
фиг. 6 - схема инвертора с естественной коммутацией с трансформаторами, который может входить в состав частотного преобразователя на фиг. 2;
фиг. 7 - график зависимости частоты возбуждающего сигнала от времени для независимой от времени частоты, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а частота нанесена на график по вертикальной оси на линейной шкале между 10 и 20 Гц;
фиг. 8 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени при возбуждении в течение 60 сек с возбуждающим сигналом, приведенном на фиг. 7, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 550 и -550 относительных единиц, таким образом, что каждая отметка на оси соответствует 100 относительным единицам;
фиг. 9 - график зависимости частоты возбуждающего сигнала от времени для синусоидально модулированной частоты с периодом модуляции 10 с, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а частота нанесена на график по вертикальной оси на линейной шкале между 10 и 20 Гц;
фиг. 10 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени при возбуждении в течение 60 сек с возбуждающим сигналом, приведенном на фиг. 9, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 50 и -50 относительных единиц;
фиг. 11 - зависимость частоты возбуждающего сигнала от времени для пилообразно модулированной частоты с периодом модуляции 10 с, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а частота нанесена на график по вертикальной оси на линейной шкале между 10 и 20 Гц;
фиг. 12 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени при возбуждении в течение 60 сек с возбуждающим сигналом, приведенном на фиг. 11, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 150 и -150 относительных единиц;
фиг. 13 - зависимость частоты возбуждающего сигнала от времени для модулированной в виде прямоугольного импульса частоты с периодом модуляции 10 с, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а частота нанесена на график по вертикальной оси на линейной шкале между 10 и 20 Гц;
фиг. 14 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени с возбуждением в течение 60 сек с возбуждающим сигналом, приведенном на фиг. 13, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 15 и -15 относительных единиц;
фиг. 15 - спектр входного тока, полученный при постоянной скорости двигателя и постоянном угле зажигания инвертора, при этом частота нанесена на график по горизонтальной оси на линейной шкале между 0 и 100 Гц, а ток нанесен на график по вертикальной оси на линейной шкале доли тока в процентах в частоте основной гармоники между 0 и 3%;
фиг. 16 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени, при возбуждении инвертором, приведенным на фиг. 5, в течение 60 сек со спектром входного тока, приведенном на фиг. 15, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 30 и -30 относительных единиц;
фиг. 17 - другой спектр входного тока, полученный путем синусоидального изменения частоты привода с периодом 10 с, при этом частота нанесена на график по горизонтальной оси на линейной шкале между 0 и 100 Гц, а ток нанесен на график по вертикальной оси на линейной шкале доли тока в процентах частоты основной гармоники между 0 и 1%;
фиг. 18 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени, при возбуждении инвертором, показанным на фиг. 5, в течение 60 сек со спектром входного тока, приведенном на фиг. 17, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 7 и -5 относительных единиц, таким образом, что каждая отметка на оси соответствует 2 относительным единицам;
фиг. 19 - другой спектр входного тока, полученный путем использования модулированной в виде прямоугольного импульса частоты привода с периодом 10 с, при этом частота нанесена на график по горизонтальной оси на линейной шкале между 0 и 100 Гц, а ток нанесен на график по вертикальной оси на линейной шкале доли тока в процентах частоты основной гармоники между 0 и 1%;
фиг. 20 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени, при возбуждении инвертором, показанным на фиг. 5, в течение 60 сек со спектром входного тока, приведенном на фиг. 19, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 2,5 и -0,5 относительных единиц;
фиг. 21 - другой спектр входного тока, полученный путем применения периодически повторяющейся модуляции угла зажигания инвертора, при этом частота нанесена на график по горизонтальной оси на линейной шкале между 0 и 100 Гц, а ток нанесен на график по вертикальной оси на линейной шкале доли тока в процентах частоты основной гармоники между 0 и 1%;
фиг. 22 - график зависимости крутящего момента (величина в относительных единицах) между элементами 2 и 3 в модели четырех масс от времени, при возбуждении инвертором, показанным на фиг. 5, в течение 60 сек со спектром входного тока, приведенном на фиг. 19, при этом время нанесено на график по горизонтальной оси на линейной шкале между 0 и 60 с, а крутящий момент нанесен на график по вертикальной оси на линейной относительной шкале между 10 и -8%; и
фиг. 23 - схема устройства и способа для охлаждения потока углеводородов, с применением системы привода с переменной скоростью, показанной на фиг. 1.
Для оптимизации этого описания линия и поток, переносимый в этой линии, обозначены одной позицией. Сходные компоненты обозначены одинаковыми позициями.
Когда система привода с переменной скоростью присоединяется к источнику питания переменного тока для приведения в движение механического узла, содержащего механическую нагрузку, в этом механическом узле и/или источнике питания переменного тока может возбуждаться резонанс крутильных колебаний из-за интергармонических токов, генерируемых внутри системы привода с переменной скоростью.
Ниже описано, каким образом можно избежать чрезмерного возбуждения резонанса крутильных колебаний, вызывая колебания в интергармонических частотах, которые генерируются в частотном преобразователе независимо от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока.
Путем возбуждения колебаний интергармонических частот, предотвращается длительное возбуждение резонанса крутильных колебаний, поскольку интергармонические частоты постоянно изменяются. Если это производится независимо от резонансного возбуждения крутильных колебаний, то достигается ситуация, когда резонанс крутильных колебаний не может перерасти в чрезмерно большой крутящий момент. В результате, двигатель может приводиться во вращение в большей или меньшей степени с любой скоростью, и в этом случае нет необходимости измерять или детектировать мгновенный крутящий момент.
Необязательно, чтобы колебания были случайными; колебания могут прикладываться в соответствии с заранее определенной конфигурацией колебаний. Колебания заключаются в многократном и периодическом изменении интергармонических частот, в соответствии с точно заданной формой волны. Несмотря на это, заданная форма волны может зависеть от частоты привода и изменяться заданным образом в зависимости от частоты привода.
Интергармонические частоты могут удобным образом изменяться путем изменения частоты привода (или скорости двигателя), или за счет изменения угла зажигания возбуждающих импульсов инвертора, содержащего переключающие компоненты, активируемые возбуждающими импульсами. Для того чтобы воздействие колебаний на нагрузку было незначительным, необходимо, чтобы они были относительно небольшими.
На фиг. 1 приведена схема системы привода с переменной скоростью, посредством линии 15 питания присоединенной к источнику питания переменного тока, представленному генератором 10. Система привода с переменной скоростью дополнительно содержит электрический двигатель 30. Электрический двигатель 30 присоединен к механическому узлу, содержащему приводной вал 35 и механическую нагрузку 40. Приводной вал 35 соединен с возможностью передачи приводного усилия с электрическим двигателем 30 и механической нагрузкой 40, для того чтобы механическая нагрузка 40 могла приводиться в движение электрическим двигателем 30. Электрический двигатель 30 электрически присоединен к преобразователю 20 частоты посредством электрической линии 25. Частотный преобразователь 20 располагается между источником питания переменного тока и электрическим двигателем 30.
Источник питания переменного тока, как правило, содержит, по меньшей мере, генератор 10, который приводится в движение приводным устройством какого-либо вида (например, гидравлической турбиной, газовой турбиной, паровой турбиной, двигателем). Таким образом, источник питания переменного тока, как правило, включает в себя второй механический узел, в дополнение к механическому узлу, приводимому в движение электрическим двигателем 30.
Частотный преобразователь выполнен с возможностью преобразования питания переменного тока, полученного из источника питания переменного тока посредством линии 15 питания с частотой источника, в преобразованное питание в электрической линии 25 с переменной частотой привода, отличающейся от частоты источника. Частота источника часто составляет 50 Гц или 60 Гц.
На фиг. 2 приведена типовая схема примера подходящего частотного преобразователя 20, который может быть использован в данном случае. Он содержит выпрямитель 50 источника, инвертор 60 нагрузки, связанные между собой посредством линии 70 постоянного тока. Линия 70 постоянного тока может содержать емкость в том случае, если инвертор является инвертором напряжения, или может содержать индуктивность - в том случае, если инвертор является инвертором тока. Предложенные способы предотвращения чрезмерного возбуждения резонанса крутильных колебаний могут применяться в любом случае, но на практике необходимость обращать внимание на интергармоники является более заметной в случае использования инверторов тока. Таким образом, предложенные в настоящем описании способы первоначально направлены на применение в системах привода с переменной скоростью, имеющих диапазон мощности от 25 МВт и выше, поскольку не существует инверторов напряжения, которые в целом доступны для таких высоких мощностей. В настоящее время максимально доступная номинальная мощность для инверторов с естественной коммутацией (LCI - load-commutated inverter) составляет 120 МВт.
Инвертор 60 нагрузки обычно является переключаемым устройством, которое может содержать переключающие компоненты в виде вентильных полупроводниковых устройств. Примером могут служить полевые транзисторы, такие как биполярный транзистор с изолированным затвором (IGBT, insulated-gate bipolar transistor) и тиристоры. Переключающие компоненты управляются посредством схемы 62 управления инвертором, которая обычно генерирует возбуждающие импульсы для управления переключающими компонентами. Выпрямитель 50 источника также может включать в себя переключающие компоненты, обычно в виде вентильных полупроводниковых устройств, которые управляются через схему 52 управления выпрямителем.
Таким образом, преобразование питания переменного тока в преобразованное питание с помощью частотного преобразователя 20 обычно включает в себя формирование выпрямленного сигнала за счет выпрямления питания переменного тока в выпрямителе 50 источника и преобразование выпрямленного сигнала в преобразованное питание и, как правило, включает в себя активацию переключающих компонентов с помощью возбуждающих импульсов.
Несмотря на фильтрующие элементы в линии 70 постоянного тока, выпрямленный ток в линии постоянного тока на практике не является абсолютно постоянным, но будет иметь относительно слабые пульсации. Составляющие сигнала на целых кратных 6 (или 12 в случае инвертора с 12-импульсной нагрузкой) частотам привода, создаваемые изменяющей конфигурацией инвертора нагрузки, преобразующие выходную частоту, вызывают протекание токов назад в выпрямитель источника, где они снова преобразуются изменяющей конфигурацией выпрямителя. Таким образом, генерируются дополнительные частоты, которые могут не являться целыми кратными основной частоты источника. Они называются частотами интергармоник интергармонических токов.
На фиг. 3 приведен пример так называемого инвертора с естественной коммутацией (LCI), выполненного на основе тиристоров. Управляющая схема не изображена из соображений ясности (читаемости) фигуры. Как правило, активным является выпрямитель 50 источника, поскольку в инверторе этого типа выходная мощность не может управляться инвертором 60 нагрузки. Пример показывает трехфазный выпрямитель источника (фазы обеспечиваются линиями питания 15а, 15b, 15с) и трехфазный инвертор нагрузки (выходные фазы находятся на трех шинах 25а, 25b, 25с возбуждения), при этом каждая фаза использует два тиристора обобщенно обозначенных позициями 55 и 65. В этом случае выпрямитель источника и инвертор нагрузки являются 6-импульсными системами. Линия 70 постоянного тока использует индуктивность 72. Соответствующие устройства-инверторы с естественной коммутацией (LCI) серийно выпускаются в различных компаниях, включая ABB и Siemens, для мощностей вплоть до приблизительно 120 МВт. В случае если частотный преобразователь 20 выполнен на основе преобразователя с естественной коммутацией (LCI), электрический двигатель 30 должен быть синхронным двигателем.
Интергармоники спектра тока зависят от типа частотного преобразователя. В качестве примера на фиг. 4-6 приведены различные 12-импульсные инверторы с естественной коммутацией.
На фиг. 4 приведена схема инвертора с естественной коммутацией, имеющего по существу два отдельных 6-импульсных частотных преобразователя, приведенных на фиг. 3, который управляется с помощью фазового угла между ними и получает питание от генератора 10 через многофазный входной трансформатор 22. Выходное преобразованное питание подается на электрический двигатель 30 через многофазный выходной трансформатор 27. Каждый из отдельных 6-импульсных преобразователей имеет выпрямитель (соответственно, 50а и 50b), инвертор (соответственно, 60а и 60b) нагрузки, и линию (соответственно, 72а и 72b) постоянного тока. Линии 72а и 72b постоянного тока по существу не влияют друг на друга,
В инверторе с естественной коммутацией, приведенном на фиг. 5, имеются два 6-импульсных выпрямителя (соответственно, 50а и 50b) и два 6-импульсных инвертора (соответственно, 60а и 60b), при этом все они последовательно соединенные посредством одной линии 72 постоянного тока. В этом случае определенные гармоники двигателя гасятся в линии 72 постоянного тока, в то время как другие увеличиваются по сравнению с примером, показанным на фиг. 4.
На фиг. 6 показаны две цепи «выпрямитель-линия постоянного тока-инвертор», но между индуктивностью 72а одной из этих цепей и индуктивностью 73b другой цепи создана взаимная магнитная связь Κ1. Аналогичным образом, вторая взаимная магнитная связь К2 создана между индуктивностью 73а одной из этих цепей и индуктивностью 72b другой цепи.
В каждом из примеров, приведенных на фиг. 4-6, некоторые из указанных гармоник будут гаситься, однако созданные интергармоники гаситься не будут.
Как показано на фиг. 1, схема 22 электрической модуляции создается для того, чтобы взаимодействовать с частотным преобразователем 20. Она может входить в состав или взаимодействовать со схемой 52 управления выпрямителя и/или схемой 62 управления инвертором. Схема 23 электрической модуляции выполнена с возможностью вызывать колебания интергармонических частот интергармонических токов, генерируемых в частотном преобразователе 20. Колебания могут состоять в многократном и периодическом изменении интергармонических частот, в соответствии с заранее программируемой или заданной конфигурацией колебаний. Это может быть сделано полностью независимо от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока, независимо от степени возбуждения резонанса крутильных колебаний.
Система привода с переменной скоростью функционирует следующим образом. Питание переменного тока из источника питания переменного тока имеет частоту источника и преобразуется в частотном преобразователе 20 в преобразованное питание с переменной частотой привода. При этом частота привода может быть не равна частоте источника. Электрический двигатель 30 получает электропитание с преобразованным питанием. В свою очередь, электрический двигатель 30 приводит в движение механический узел. Преобразованное питание содержит интергармонические токи, имеющие дополнительные частотные компоненты на интергармонических частотах, которые не равны частотам, кратным частоте источника с коэффициентом, равным целому числу. Эти дополнительные частотные компоненты генерируются в частотном преобразователе 20. Однако, в соответствии с настоящим изобретением, колебания накладываются на интергармонические частоты, независимо от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока.
Нет необходимости быстро сравнивать колебания с частотами интергармоник. Например, если колебания накладываются путем многократного и периодического изменения интергармонических частот в соответствии с заданной конфигурацией изменения, то частота конфигурации изменения (например, 1 раз за период) может быть по меньшей мере в 10 раз ниже, чем самая низкая частота интергармоники при отсутствии наложенных колебаний.
Для демонстрации изобретения, была создана модель с помощью программы MATLAB Simulink, представляющая источник питания переменного тока, содержащий узел для генерации энергии, представляющий собой газовую турбину, приводящую во вращение генератор. Узел генерации энергии моделировался в соответствии с моделью четырех масс, обеспечивающей инерцию. Четыре массы связаны одна с другой с помощью вала, который моделируется в виде гасителя крутильных колебаний и пружины кручения. Таким образом может моделироваться колебательное поведение масс.
Параметры, используемые для модели четырех масс, соответствуют параметрам газотурбинного генератора Alstom GT132, и приведены ниже в таблице 1. В этой таблице Jn - момент инерции n-ного элемента массы, Кmn - коэффициент жесткости пружины кручения между элементами массы пит, Dnm - коэффициент демпфирования крутильных колебаний между элементами массы пит. Возбуждение в модели четырех масс выполнялось различными возбуждающими сигналами.
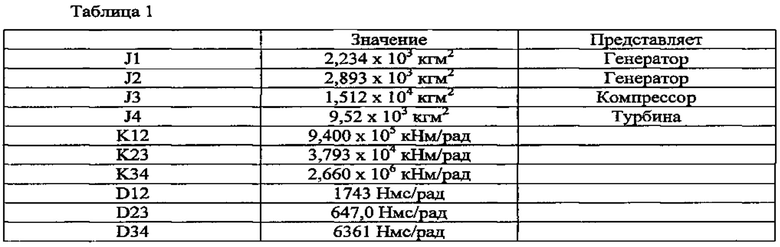
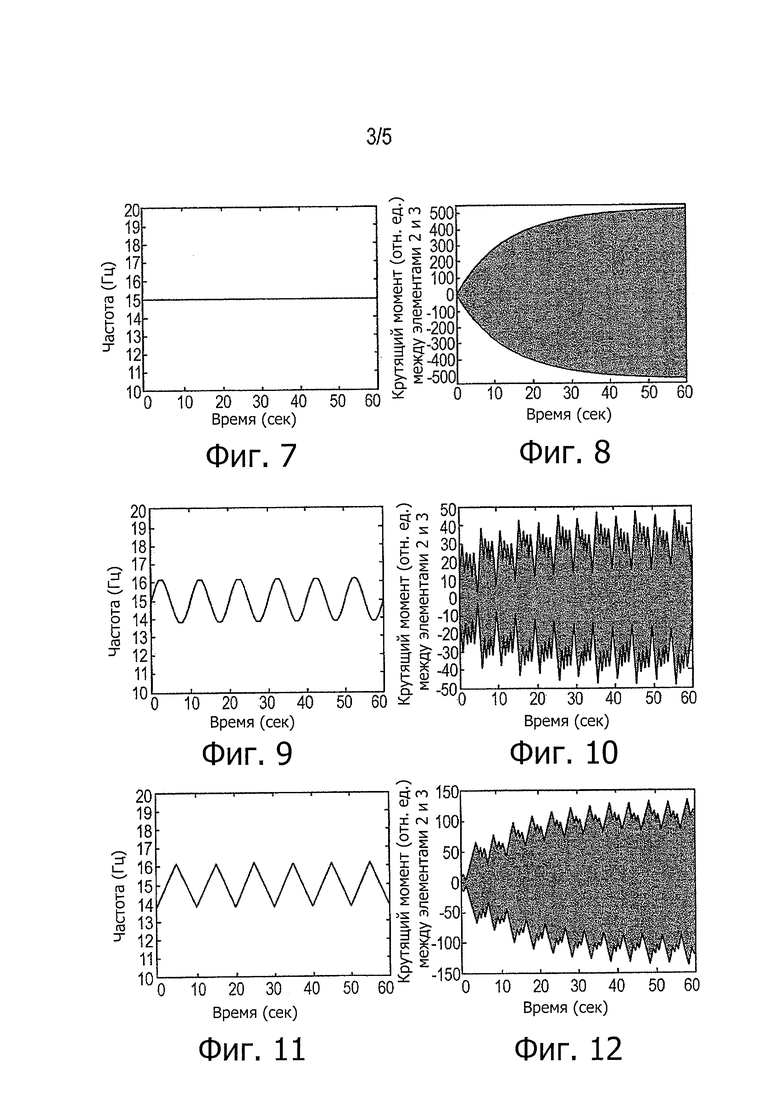
На фиг. 7 представлен смодулированный возбуждающий сигнал, имеющий постоянную частоту 14,973 Гц, что соответствует резонансной частоте крутильных колебаний между вторым и третьим элементами массы модели четырех масс или очень близкой к ней. Эта частота может быть частотой интергармонического тока, если частота привода выбрана близкой к частоте источника. Обычно частоты привода, близкие к частотам источника, находятся в так называемом диапазоне исключения, в котором система не может работать постоянно.
Результирующий вычисленный крутящий момент между вторым и третьим элементами в зависимости от времени, приведен на фиг. 8. Это базовый вариант, показывающий, что может случиться, если не будут предприняты меры предосторожности. Если не предпринимать каких-либо мер предосторожности против возбуждения резонанса крутильных колебаний, будет вообще невозможно привести в движение электрический двигатель на этой частоте на какой-либо продолжительный период времени.
На фиг. 9 и 10 показано, что может случиться, если частоту интергармоники изменять путем многократного и периодического увеличения и уменьшения указанной частоты на 1,2 Гц в соответствии с синусоидальным конфигурацией, имеющим период 10 с. Ток возбуждения приведен на фиг. 9, а результирующий крутящий момент между вторым и третьим элементами массы представлен на фиг. 10. Из фиг. 10 видно, что максимальный крутящий момент снижен с коэффициентом около 10.
Обнаружено, что эффективность влияния колебания на возбуждение резонанса крутильных колебаний зависит от периода и амплитуды изменения в частоте интергармоники (возбуждения). Поэтому может быть полезно исследование на конкретном примере для выявления для каждой отдельной производственной линии, какие наилучшие параметры модуляции существуют для каждой частоты привода.
Это было сделано эмпирически (методом проб и ошибок) для синусоидально измененных возбуждений настоящей модели четырех масс в диапазоне центральных частот возбуждения (т.е. усредненных по времени частот возбуждения) вблизи резонанса крутильных колебаний. Результаты приведены в таблице 2. В первой колонке таблицы приведена центральная частота, а во второй колонке приведена величина, на которую частота максимально увеличивается и уменьшается относительно центральной частоты за счет синусоидального отклонения (т.е. «амплитуда» модуляции). Период модуляции приведен в третьей колонке, а результирующий максимальный крутящий момент в сопряжении между вторым и третьим элементами приведен в четвертой колонке.
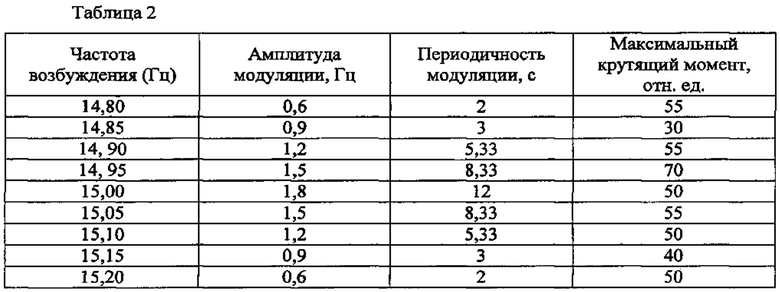
Из таблицы 2 можно увидеть, что частота модуляции (т.е. величина обратная периодичности модуляции) в этом случае находится приблизительно в промежутке 0,08-0,5 Гц, что приблизительно в 30-200 раз меньше, чем немодулированная частота интергармоники, составляющая около 15 Гц. Кроме того, амплитуда модуляции меньше, чем 2,0 Гц. Это означает, что для 6-импульсного инвертора необходимое отклонение скорости привода составляет менее 20 об/мин при номинальной (средней) скорости привода 3600 об/мин.
Вместо синусоидальной конфигурации модуляции могут применяться другие конфигурации модуляции.
Фиг. 11 и 12 показывают пилообразную конфигурацию модуляции с той же самой амплитудой и периодичностью, как у синусоидальной модуляции на фиг. 9. Видно, что максимальный крутящий момент все еще снижается с коэффициентом около 5, но это снижение менее значительно, чем при синусоидальной конфигурации модуляции.
Конфигурация модуляции в виде прямоугольного импульса тестируется на фиг. 13 и 14, снова с той же самой величиной «амплитуды» в 1,2 Гц и периодичностью 10 с, и в этом случае снижение крутящего момента почти в 5 раз лучше, чем в случае синусоидальной модуляции. Однако следует заметить, что эта конфигурация изменения частоты интергармоники не достижима на практике в случае с инвертором с естественной коммутацией, вследствие инерции механического узла и электрического двигателя, который приводит в движение механический узел.
Один из способов создания колебаний в частоте интергармоники состоит в модулировании частоты привода. Частота привода может изменяться, например, около средней частоты привода, в соответствии с зависимым от времени отклонением от средней частоты. Схема 23 электрической модуляции может быть соответственным образом интегрирована в контроллер скорости системы привода с переменной скоростью. Контроллер скорости управляет скоростью вращения электрического двигателя. Контроллер скорости взаимодействует с частотным частотного преобразователя 20ем посредством сигнала управления скоростью, который может периодически изменяться в соответствии с заданной периодической конфигурацией.
В предпочтительном варианте контроллер скорости может быть запрограммирован на периодическое изменение значения сигнала управления скоростью относительно среднего значения сигнала управления скоростью, в соответствии с зависимым от времени отклонением от среднего значения сигнала управления скоростью, чтобы вызвать заданные колебания интергармонических частот.
Во время приведения в движение холодильного компрессора для выполнения процесса охлаждения, небольшие изменения в скорости двигателя проходят практически незамеченными для процесса текущего охлаждения, но могут давать огромные преимущества в смысле предотвращения возбуждения чрезмерных крутильных колебаний. Кроме того, необходимая амплитуда колебаний в частоте привода может быть значительно меньше, чем заданная амплитуда колебаний в интергармонических частотах. Например, если частота привода регулируется посредством импульсов возбуждения выпрямителя источника, с использованием N-импульсного выпрямителя, фактические колебания частоты привода могут быть в N раз меньше, чем заданные колебания в интергармонических частотах. На практике необходимо отклонение скорости вращения электрического двигателя от средней скорости менее чем на 100 об/мин в случае использования 6-импульсного выпрямителя, и менее чем на 50 об/мин в случае использования 12-импульсного выпрямителя. В любом случае, это относительно небольшое значение по сравнению с номинальными скоростями привода, составляющими 3000 или 3600 об/мин.
В то время как приведенные выше фиг. 7-14 использовались для исследования принципа многократного и периодического изменения частоты возбуждения, которая близка к резонансу крутильных колебаний, фиг. 15-20 показывают различные модуляции, накладываемые схемой электрической модуляции на контроллер скорости. Для этого к модели MATLAB был добавлен инвертор с естественной коммутацией (LCI), приведенный на фиг. 5.
Фиг. 15 и 16 относятся к базовому варианту, в котором электрический двигатель приводится во вращение с постоянной скоростью. Фиг. 15 показывает вычисленный спектр входного тока инвертора (LCI) с естественной коммутацией. Интергармонические частоты отчетливо различимы. Результирующий крутящий момент на сопряжении между вторым и третьим элементами массы модели из четырех масс приведен на фиг. 16.
Как правило, предполагаемая частота привода имеет независимую от времени среднюю частоту и зависимое от времени отклонение от средней частоты. Зависимое от времени отклонение может быть ограничено в пределах между максимального отклонения, составляющего от 3% до 15% независимой от времени средней частоты.
Чтобы выполнить такое же синусоидальное изменение интергармонической частоты в 1,2 Гц за период 10 с, как это было сделано на фиг. 9 и 10, для контроллера скорости было задано изменение частоты привода в 0,1 Гц за период 10 с. Результирующий спектр входного тока приведен на фиг. 17, а результирующий крутящий момент на сопряжении между вторым и третьим элементами представлен на фиг. 18. Крутящий момент остается ниже 6 относительных единиц, что соответствует улучшению приблизительно в 4 раза.
В то время как электрический двигатель может быть способен поддерживать работу с этим относительно медленным изменением скорости, резкое ступенчатое изменение скорости невозможно. Тем не менее, исследовано, что может случиться, если для контроллера скорости задано изменение скорости в виде прямоугольного импульса. Конечно, конфигурация изменения действительной скорости и, следовательно, модуляции интергармонических частот не имеет прямоугольную форму, как предполагалось для фиг. 13, но как можно увидеть на фиг. 19 и 20, результаты все еще являются очень хорошими. Если пренебречь небольшим начальным переходным процессом, рассчитанный крутящий момент в целом остается ниже 2 относительных единиц, в результате чего достигается улучшение примерно в 12,5 раз.
Другой способ возбуждения колебаний интергармонических частот состоит в возбуждении колебаний угла зажигания возбуждающих импульсов инвертора. В отличие от скорости, угол зажигания инвертора может быть изменен (например, относительно фазового угла двигателя) мгновенно, и, таким образом, результирующая конфигурация изменения интергармонических частот имеет более прямоугольную форму.
По аналогии с описанным выше, угол зажигания может быть описан как имеющий независимый от времени средний угол зажигания, который изменяют при помощи зависимого от времени отклонения от среднего угла зажигания. Зависимое от времени отклонение предпочтительно остается в пределах максимального отклонения 0,5-10° от независимого от времени среднего угла зажигания. Маловероятно, что более мелкие колебания угла зажигания будут подавлять возбуждение резонанса крутильных колебаний, в то время как более значительные колебания угла зажигания могут повлечь за собой проблемы стабильности в контроллере скорости.
Для тестирования влияния угла зажигания инвертора, описанная выше модель используется таким образом, что прямоугольное колебание накладывается на вход угла зажигания инвертора. Хороший результат был достигнут с прямоугольным колебанием для наложения волны прямоугольной формы, состоящей из 2° увеличения и 2° уменьшения стандартного угла зажигания за периоды в 1 с. Скорость электрического двигателя была установлена на 48,75 Гц, на которой ожидалось возбуждение резонанса крутильных колебаний в сопряжении между вторым и третьим элементами массы. Спектр входного тока и результирующий крутящий момент представлены на фиг. 21 и 22 соответственно.
Специалистам в данной области техники будет ясно, что предложенные способы могут применяться в сочетании с другими стратегиями подавления возбуждения резонанса крутильных колебаний. Например, может рассматриваться вариант установки механического демпфера на выбранных валах привода, например, в виде высокоэластичных демпферов. Однако, даже в случае, использования таких демпферов, настоящее изобретение может быть полезным, поскольку ожидается, что с применением настоящего изобретения, износ таких демпферов будет происходить не так быстро.
Система привода с переменной скоростью и способы управления этой системой могут применяться для приведения в движение нагрузки в виде компрессора. В этом случае изобретение может предпочтительно применяться в способах охлаждения потока углеводородов. В этом случае хладагент циклически сжимается компрессором и охлаждает поток углеводородов путем теплообмена между потоком углеводородов и хладагентом. Охлаждение может вызвать конденсацию потока углеводородов и таким образом может быть произведен сжиженный поток углеводородов, такой как, например, сжиженный поток природного газа.
Такие способы иллюстрируются с помощью фиг. 23, на которой представлено устройство для охлаждения потока углеводородов. Оно использует систему привода с переменной скоростью, приведенную на фиг. 1. Нагрузка 40 представлена в виде компрессора, который входит в состав холодильного контура 100. Холодильный контур 100 содержит устройство 110 отвода тепла, устройство 120 снижения давления, чтобы понижать давление хладагента до давления охлаждения, и холодильный теплообменник 80.
Компрессор сжимает хладагент. Устройство отвода тепла отводит тепло от сжатого хладагента, в конечном счете, до температуры окружающей среды, хотя возможно использование промежуточной текучей среды. Устройство 120 снижения давления здесь изображено как дроссель Джоуля-Томсона, но оно может быть представлено в виде турбины-расширителя или комбинации из турбины-расширителя и дросселя Джоуля-Томсона.
В холодильном теплообменнике 80 тепло может переходить от потока 90 углеводородов, который также проходит через холодильный теплообменник 80, к хладагенту, который нагревается, в то время как поток углеводородов охлаждается. Охлажденный поток 95 углеводородов и нагретый хладагент 130 вытесняются из холодильного теплообменника 80. Нагретая охлаждающая текучая среда 130 затем проходит к компрессору для повторного сжатия и ее цикл на этом замыкается.
Холодильный теплообменник 80 и холодильный контур 100 изображены очень схематично. Они могут представлять любой подходящий метод охлаждения, включая используемые в процессах сжижения углеводородов, в частности, в любом процессе сжижения природного газа, для производства сжиженного природного газа. Кроме того, изобретение не ограничивается выбором определенного теплообменника.
Примерами подходящих методов охлаждения являются те, которые могут быть выведены из процессов единого холодильного цикла (обычно это процессы SMR - single mixed refrigerant - с единым компаундированным хладагентом, такие как PRICO, описанные в работе «Производство сжиженного природного газа на плавающих платформах», авторы К.Р. Джонсон и П. Кристиансон, представленном на Gastech 1998 в Дубае (К.R. Johnsen, P. Christiansen "LNG Production on floating platforms" - Gastech 1998, Dubai), но также возможно применение однокомпонентного хладагента, например как в процессе BHP-cLNG, также описываемом в указанном исследовании Джонсона и Кристиансона); процессов с двумя холодильными контурами (например, широко применяемый процесс, использующий хладагент из смеси на основе пропана, часто обозначаемый C3MR (С3-Mixed-Refrigerant), например, такой как описан в патентном документе US 4,404,008, или, например, двухконтурные процессы со смешанным хладагентом (DMR - double mixed refrigerant), примеры которых описаны в патентном документе US 6,658,891, или например, двухконтурные процессы, в которых каждый холодильный контур содержит однокомпонентный хладагент); и процессов, основанных на последовательности из трех или более компрессоров для трех или более холодильных контуров (например, как описано в патентном документе US 7,114,351). Другие примеры подходящих методов охлаждения описаны в следующих патентных документах: US 5,832,745 (процесс Shell SMR); US 6,295,833; US 5,657,643 (оба варианта - Black и Veatch SMR); US Patent 6,370,910 (процесс Shell DMR). Другим подходящим примером процесса DMR является так называемый процесс Axens LIQUEFIN, например такой, как описано в работе под заголовком «LIQUEFIN: инновационный процесс для уменьшения затрат на сжижение природного газа», авторы П.-Ю. Мартин и др., представленном на двадцать второй всемирной газовой конференции в Токио, Япония в 2003 г.(P-Y Martin et al "LIQUEFIN: AN INNOVATIVE PROCESS TO REDUCE LNG COSTS" - 22nd World Gas Conference, (2003) Tokyo, Japan). Другими подходящими трехконтурными процессами могут быть, например, описанные в следующих патентных документах: US 6,962,060; WO 2008/020044; US 7,127,914; DE 3521060A1; US 5,669,234 (коммерчески известный как оптимизированный каскадный процесс); US 6,253,574 (коммерчески известный как каскадный процесс со смешанной текучей средой); US 6,308,531; в опубликованной патентной заявке США 2008/0141711; и в работе М.Дж. Робертса и др. «Единая последовательность большой производительности АР-Х (ТМ) гибридного процесса сжижения природного газа», Gastech 2002, Доха, Катар (13-16 октября 2002 г.) (Mark J. Roberts et al "Large capacity single train AP-X(TM) Hybrid LNG Process", Gastech 2002, Doha, Qatar (13-16 October 2002)).
Эти предложения сделаны для того чтобы продемонстрировать широкую применимость изобретения, и не являются исключительным и/или исчерпывающим списком возможностей. Не все приведенные выше примеры используют электрические двигатели в качестве компрессорных приводов для охлаждающего вещества. Следует принимать во внимание, что любые приводы, отличные от электрических двигателей, могут быть заменены электрическими двигателями, подходящими для применения в контексте настоящего изобретения. Кроме того, в известных методиках охлаждения компрессоры для хладагента часто приводятся в движение газовой турбиной, поставляемой вместе с электрическим двигателем, в качестве вспомогательного двигателя. В этих случаях изобретение также применимо.
Поток углеводородов, который должен быть охлажден, первоначально может находиться в виде пара. Он может быть выведен из любого подходящего газового потока, для охлаждения и, по выбору, сжижения. Часто используемым примером является поток природного газа, полученный из пластов природного газа или нефтяного пласта, или из угольных пластов. В качестве альтернативы, поток 90 углеводородов также может быть получен из другого источника, включающего в себя, например, синтетический источник, например, такой как процесс Фишера-Тропша (Fisher-Tropsch process).
Специалисты в данной области техники примут во внимание, что настоящее изобретение может быть осуществлено множеством различных способов, не выходя за рамки объема приложенной формулы изобретения.



Изобретение относится к области электротехники и может быть использовано для управления системой приводов с переменной скоростью вращения. Техническим результатом является повышение точности демпфирования колебания и упрощение. Система привода с переменной скоростью, применяющая электрический двигатель и частотный преобразователь, расположенный между источником питания переменного тока и электрическим двигателем. Частотный преобразователь функционирует таким образом, чтобы преобразовывать питание переменного тока, полученное из источника питания переменного тока с частотой источника, в преобразованное питание с переменной частотой привода. Механический узел соединен с электрическим двигателем. Создана схема электрической модуляции, взаимодействующая с частотным преобразователем. Она выполнена с возможностью возбуждения колебаний интергармонических частот интергармонических токов, генерируемых в частотном преобразователе, независящих от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока. 3 н. и 12 з.п. ф-лы, 23 ил., 2 табл.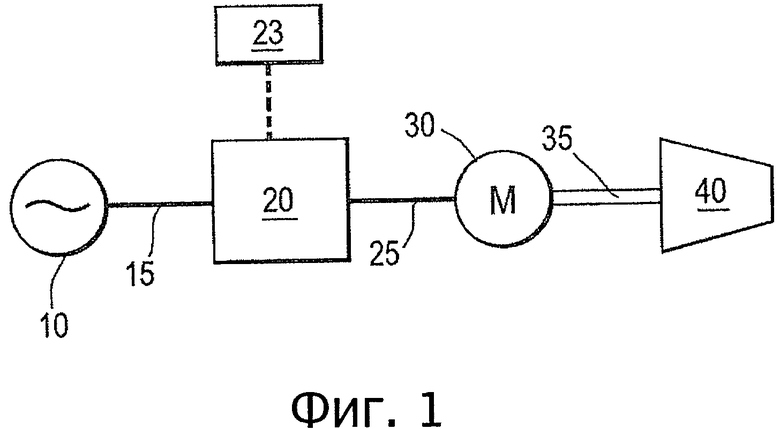
1. Способ управления системой привода с переменной скоростью, содержащей электрический двигатель и частотный преобразователь, расположенный между источником питания переменного тока и электрическим двигателем, включающий этапы, на которых:
преобразуют питание переменного тока, полученное из источника питания переменного тока с частотой источника, в преобразованное питание с переменной частотой привода, которая не равна указанной частоте источника, при этом преобразованное питание содержит интергармонические токи, имеющие дополнительные частотные компоненты на интергармонических частотах, которые не кратны частоте источника с коэффициентом, равным целому числу;
подают в электрический двигатель преобразованное питание;
приводят в движение электрическим двигателем механический узел, содержащий по меньшей мере приводной вал и механическую нагрузку;
вызывают колебания интергармонических частот, не зависящие от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока.
2. Способ по п. 1, в котором указанные колебания накладывают в соответствии с заданной конфигурацией колебаний.
3. Способ по п. 1 или 2, в котором указанные колебания интергармонических частот вызывают путем многократного и периодического изменения интергармонических частот.
4. Способ по п. 1, в котором колебания выбранной интергармонической частоты ограничивают в пределах максимального отклонения, составляющего от 3% до 15% от частоты выбранной интергармонической частоты в случае, когда указанные колебания отсутствуют.
5. Способ по п. 1, в котором указанные колебания интергармонических частот вызывают путем изменения частоты привода относительно средней частоты привода в соответствии с зависимым от времени отклонением от средней частоты.
6. Способ по п. 1, в котором для указанного преобразования питания переменного тока в указанное преобразованное питание применяют частотный преобразователь, при этом электрический двигатель вращается на скорости, которая управляется контроллером скорости, взаимодействующим с частотным преобразователем через сигнал управления скоростью, причем указанные колебания интергармонических частот вызываются периодическим изменением сигнала управления скоростью относительно среднего сигнала управления скоростью в соответствии с зависимым от времени отклонением от указанного среднего сигнала управления скоростью.
7. Способ по п. 6, в котором сигнал управления скоростью изменяют в соответствии с конфигурацией в виде прямоугольных колебаний.
8. Способ по п. 6 или 7, в котором скорость, с которой электрический двигатель вращается, отклоняется от средней скорости менее чем на 100 об/мин, предпочтительно менее чем на 20 об/мин.
9. Способ по п. 1, в котором при преобразовании указанного питания переменного тока в преобразованное питание формируют выпрямленный сигнал путем выпрямления указанного питания переменного тока и преобразования указанного выпрямленного сигнала в указанное преобразованное питание, используя инвертор, содержащий переключающие компоненты, активируемые возбуждающими импульсами, при этом указанные колебания интергармонических частот вызывают путем периодического изменения угла зажигания возбуждающих импульсов относительно среднего угла зажигания в соответствии с зависимым от времени отклонением от среднего угла зажигания.
10. Способ по п. 9, в котором указанное зависимое от времени отклонение ограничено максимальным отклонением от среднего угла зажигания, которое составляет от 0,5 до 10°.
11. Способ по п. 1, в котором указанные колебания интергармонических частот вызывают модуляцией интергармонических частот в соответствии с заданной формой колебаний.
12. Способ по п. 11, в котором указанная заданная форма колебаний изменяется заданным образом в зависимости от частоты привода.
13. Система привода с переменной скоростью, содержащая:
электрический двигатель;
частотный преобразователь, расположенный между источником питания переменного тока и электрическим двигателем, предназначенный для преобразования питания переменного тока, полученного из источника питания переменного тока с частотой источника, в преобразованное питание с переменной частотой привода, которая не равна частоте источника;
механический узел, связанный с электрическим двигателем, содержащий по меньшей мере приводной вал и механическую нагрузку; и
схему электрической модуляции, взаимодействующую с частотным преобразователем и выполненную с возможностью вызывать колебания интергармонических частот интергармонических токов, генерируемых в частотном преобразователе, независящие от возбуждения крутильных колебаний в механическом узле и источнике питания переменного тока.
14. Система привода с переменной скоростью по п. 13, в которой схема электрической модуляции входит в состав контроллера скорости указанной системы привода с переменной скоростью.
15. Способ охлаждения потока углеводородов, включающий этапы, на которых:
управляют системой привода с переменной скоростью в соответствии со способом по любому из пп. 1-12, при этом механическая нагрузка содержит компрессор;
циклически выполняют сжатие хладагента компрессором и охлаждение потока углеводородов путем теплообмена между потоком углеводородов и хладагентом.
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| СПОСОБ УПРАВЛЕНИЯ ГЕНЕРИРУЮЩЕЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2005 |
|
RU2295191C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОЛЯЦИОННОГО МАТЕРИАЛА ДЛЯ ПОЛИГОНОВ ЗАХОРОНЕНИЯ БЫТОВЫХ И ПРОМЫШЛЕННЫХ ОТХОДОВ | 2010 |
|
RU2437845C1 |
| JP 201333533 A, 30.11.2001 | |||
| US 2006232250 A1, 19.10.2006 | |||
| US 7173399 B2, 06.02.2007 | |||
| EP 2073374 A1, 24.06.2009 | |||
| WO 2011121049 A1, 06.10.2011 | |||
| CN 101164225 A, 16.04.2008. | |||

