Область техники, к которой относится изобретение.
Данная группа изобретений относится к способам и системам навигации подводных объектов, а именно к способам и системам, когда принимают посредством расположенных на гидроакустических буях приемников сигналы со спутников, определяют координаты гидроакустических буев посредством вычислительных модулей гидроакустических буев, передают данные о местоположении и идентификационные данные в виде гидроакустических сигналов, излучаемых передатчиками гидроакустических буев, принимают сигналы с помощью расположенного на подводном объекте приемника, определяют координаты подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно. Данное решение может быть использовано при одновременном определении географического положения неограниченного числа подводных мобильных объектов, дистанционно управляемых подводных аппаратов, водолазов, морских животных и т.д. в процессе движения.
В данном описании использованы следующие термины:
Гидроакустический буй - свободно плавающий или установленный на якоре буй, предназначенный для излучения и/или приема и ретрансляции по радиоканалу гидроакустических сигналов.
Рейк (Rake) - приемник, который позволяет выделить отдельные отражения и выбрать самые ранние для определения времени прихода при многолучевом распространении гидроакустических сигналов. Многолучевое распространение - это эффект, наблюдаемый при распространении гидроакустических сигналов. Возникает при условии существования в точке приема не только прямого, но и еще одного или целого ряда отраженных лучей. Другими словами, на антенну приемника приходят не только прямые лучи (непосредственно от самого источника), но и отраженные (от дна, водной поверхности и прочих объектов). При многолучевом распространении сигналы, приходящие различными путями, слабо коррелированы. Чтобы сдвинутые во времени многолучевые компоненты наблюдались раздельно на выходе линейного фильтра приемника необходимо, чтобы отклик фильтра на каждую компоненту сигнала был кратковременным по сравнению с их взаимным временным сдвигом. В качестве приемного фильтра лучше всего принимать согласованный, так как отклик этого фильтра на сигнал есть АКФ (автокорреляционная функция) сигнала. Для разделения многолучевых компонент больше пригодны сигналы с острой АКФ. Поэтому для многолучевого разнесения используются широкополосные сигналы: сигнал имеет большую длительность но фильтр укорачивает его. Сигнал, искаженный многолучевым каналом (а), подается на согласованный фильтр, и, если сигнал синтезирован правильно, на выходе фильтра наблюдаются компоненты в виде острых неперекрывающихся пиков. Эти пики напоминают своим внешним видом садовые грабли («rake» в переводе с английского). Поэтому устройство, осуществляющее многолучевое разделение, назвали rake-приемником (или приемник разнесенных сигналов).
Уровень техники способа.
Существуют способы навигации подводных объектов, которые заключаются в определении координат подводных объектов (позиционировании). Все эти термины используются как синонимы. Для этого известны три типа систем определения координат подводных объектов в гидроакустике, отличающиеся друг от друга размерами измерительных баз, представляющие собой расстояния между гидроакустическими антеннами. Это системы УКБ (Ультракороткобазисные, USBL, ultra-short baseline), КБ (короткобазисные, SBL, short baseline) и ДБ (длиннобазисные, LBL, long baseline). Наиболее близкими по своим характеристикам к заявленному решению являются длиннобазисные системы, однако в данном изобретении предлагается синтез короткобазисной и длиннобазисной систем, когда опорные точки (гидроакустические буи) располагаются на значительном удалении друг от друга, образуя длинную навигационную базу, но определение местоположения позиционируемого объекта производится разностно-дальномерным способом, как преимущественно в короткобазисных системах.
Достоинствами такого способа являются, во-первых, возможность одновременного позиционирования неограниченного числа объектов, а во-вторых, возможность реализовать на позиционируемом объекте полностью пассивный режим, когда для определения собственного местоположения ему достаточно только принимать сигналы гидроакустических буев, декодировать координаты гидроакустических буев и сигналов и по разностям времен прихода сигналов определять собственное географическое положение.
Известно изобретение «Способ и устройство для мониторинга и удаленного контроля беспилотного подводного устройства», патент US №5579285, МПК G01S 5/00, G01S 5/14, G01S 11/14, опубл. 21.08.1995, в соответствии с которым в различных точках поверхности моря устанавливаются дрейфующие гидроакустические буи, образующие длинную навигационную базу. Каждый гидроакустический буй оборудован приемником глобальной спутниковой навигационной системы (GPS/GLONASS), часами, синхронизированными с часами GPS, гидроакустической приемной системой с преобразователем, заглубленным под поверхностью моря и радиомодемом. Такие устройства именуются GIB (Global intelligent buoy). Каждый гидроакустический буй измеряет собственные координаты и времена прихода сигналов (ТОА - time of arrival) от подводных объектов и в предустановленные моменты передает эти данные по радиомодему на судно сопровождения или наземную станцию контроля. Гидроакустический передатчик подводного объекта периодически излучает сигнал в предустановленные моменты времени, по данным, принятым ТОА, и с учетом скорости звука в воде вычисляются расстояния от подводного объекта до буев и по известному алгоритму вычисляются и отображаются координаты подводного объекта.
Достоинства данного способа:
- не требуется точной настройки базовых линий, поскольку координаты буев фиксируются приемником глобальной спутниковой навигационной системы и соответственно уменьшается погрешность определения координат из-за неточной установки гидроакустических буев;
- поскольку излучает только передатчик, располагаемый на подводном объекте, значительно сокращается объем передаваемых по гидроакустическому каналу данных.
Недостатки данного способа:
- незакрепленные (дрейфующие гидроакустические буи) могут изменять взаимное расположение, и существует вероятность возникновения плохих взаимных расположений (например, когда позиционируемый объект и несколько гидроакустических буев выстраиваются в линию);
- практически невозможна или затруднена работы с несколькими позиционируемыми объектами, сигналы которых могут влиять друг на друга и значительно ухудшать условия приема на гидроакустических буях;
- определение ТОА (времени прихода) по фронту сигнала при низком соотношении сигнал-помеха и/или при многолучевом распространении существует неоднозначность определения ТОА из-за многочисленных отражений и/или скрывания полезного сигнала под шумом.
Также известно изобретение «Система определения координаты подводных объектов», патент RU 2437114, опубликован 20.12.2011, в котором предложен метод корреляционного приема для определения ТОА вместо определения его по фронту сигнала, что позволяет значительно улучшить ситуацию с определение ТОА в условиях низкого соотношения сигнал-помеха и при многолучевом распространении сигнала в среде.
Однако не решается проблема с невозможностью одновременного позиционирования нескольких объектов.
Согласно первой из своих сторон настоящее изобретение относится к способу навигации подводных объектов, при котором:
- принимают посредством расположенных на гидроакустических буях приемников сигналы со спутников,
- определяют координаты гидроакустических буев посредством вычислительных модулей гидроакустических буев,
- передают данные о местоположении указанных гидроакустических буев и их идентификационные данные в виде гидроакустических сигналов, излучаемых передатчиками гидроакустических буев,
- принимают сигналы с помощью расположенного на подводном объекте приемника гидроакустических сигналов,
- определяют координаты подводного объекта с помощью вычислительного модуля подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно.
Такой способ описан в патенте США на изобретение № US 5113341, опубликованном в 1992 году.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения как способа.
Недостатком этого прототипа является его невысокая точность навигации, то есть определения координат подводных объектов. Это связано с тем, что:
- происходит вычисление всех трех объемных координат, то есть долготы, широты и глубины, что затрудняет вычисления и нагружает вычислительный процессор, создает возможности для ошибок,
- сигналы могут интерферировать и создавать искажения, не совместимые с возможностью навигации,
- вместо прямых сигналов могут быть получены сигналы от гидроакустических буев, которые отражены от дна, поверхности, и это создает ошибки в определении координат.
Раскрытие изобретения как способа.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ навигации подводных объектов, позволяющий, по меньшей мере, сгладить как минимум один из указанных выше недостатков, а именно обеспечить повышение точности навигации подводных объектов.
Для достижения этой цели способ навигации подводных объектов характеризуется по существу тем, что дополнительно способ включает в себя следующие этапы:
- кодируют сигналы с указанных гидроакустических буев, в виде периодических сигналов, привязанных к часам GPS/ГЛОНАСС,
- располагают все передатчики гидроакустических сигналов на одной глубине,
- декодируют сигналы от гидроакустических буев при одновременном выделении прямых сигналов от гидроакустических буев от отраженных.
Благодаря данным выгодным характеристикам появляется возможность повышения точности навигации путем четкого разграничения сигналов, обеспечения возможности обработки только прямых сигналов. Кроме того, способ позволяет упростить все вычисления за счет того, что исходящие сигналы испускаются строго на одной глубине, что снижает вероятность ошибок при вычислениях, ускоряет процесс вычисления и снижает нагрузку на вычислительный модуль подводного объекта. При навигации подводного объекта производится определение только широты и долготы, глубину становится возможным определять по температурно компенсированному датчику глубины. При этом связной сигнал, при помощи которого гидроакустические буи передают свои координаты, одновременно является и навигационным, по которому приемники определяют время прихода. Также в способе становится возможным выделять отдельные отражения сигнала и оптимально оценивать время прихода по самому раннему "лучу", выбирая самые ранние сигналы для определения времени прихода.
Сигналы с гидроакустических буев разделяют по времени по следующим причинам: акустический канал очень плохой в информационном смысле - полоса очень узкая и очень большая разница в прохождении сигнала на разных частотах, а если два передаваемых сигнала на одной частоте, будучи даже кодированными и разделенными, друг для друга являются сильной помехой, в реальных условиях это может привести к полной неработоспособности системы навигации, невозможно будет определить координаты подводного объекта.
Существует вариант изобретения, в котором при кодировании сигналов разделяют их частотно и разносят по времени. Благодаря данной выгодной характеристике появляется возможность отделить сигналы от разных гидроакустических буев друг от друга, исключив ошибки.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области,
Уровень техники системы.
Другой своей стороной настоящее изобретение относится к системе навигации подводных объектов, включающей в себя гидроакустические буи, имеющие приемник сигналов со спутников, соединенный с вычислительным модулем гидроакустического буя, который соединен с передатчиком гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев и их идентификационные данные, система также включает в себя расположенный на подводном объекте приемник гидроакустических сигналов с указанных гидроакустических буев, соединенный с вычислительным модулем подводного объекта, выполненным с возможностью определения координат подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно Такая система описана в патенте США на изобретение № US5113341, опубликованном в 1992 год.
Данная система является наиболее близкой по технической сути и достигаемому техническому результату и выбрана за прототип предлагаемого изобретения как устройства.
Недостатком этого прототипа является его невысокая точность навигации подводных объектов.
Это связано с тем, что:
- происходит вычисление всех трех объемных координат, то есть долготы, широты и глубины, что затрудняет вычисления и нагружает вычислительный процессор, создает возможности для ошибок,
- сигналы могут интерферировать и создавать искажения, не совместимые с возможностью навигации,
- вместо прямых сигналов могут быть получены сигналы от гидроакустических буев, которые отражены от дна, поверхности, и это создает ошибки в определении координат.
Раскрытие изобретения как системы.
Настоящее изобретение, с другой своей стороны, главным образом, имеет целью предложить систему навигации подводных объектов, позволяющую, по меньшей мере, сгладить как минимум один из указанных выше недостатков, а именно обеспечить повышение точности навигации подводных объектов.
Для достижения этой цели каждый гидроакустический буй содержит соединенный с вычислительным модулем гидроакустического буя блок кодирования сигналов, выполненный с возможностью формирования кодированного периодического сигнала, привязанного к часам GPS/ГЛОНАСС, при этом все передатчики гидроакустических сигналов расположены на одной глубине, а каждый приемник гидроакустических сигналов с указанных гидроакустических буев имеет блок декодирования сигналов от гидроакустических буев и связанный с ним модуль, выделяющий прямые сигналы от гидроакустических буев от отраженных и позволяющий фиксировать время прихода только прямого сигнала, причем каждый модуль, выделяющий прямые сигналы от гидроакустических буев от отраженных, выполнен в виде Рейк-приемника.
Благодаря данным выгодным характеристикам появляется возможность повышения точности навигации путем четкого разграничения сигналов, обеспечения возможности обработки только прямых сигналов. При этом связной сигнал, при помощи которого гидроакустические буи передают свои координаты, одновременно является и навигационным, по которым приемники определяю время прихода. Также в системе с помощью Рэйк-приемника становится возможным выделять отдельные отражения сигнала и оптимально оценивать время прихода по самому раннему "лучу", выбирая самые ранние сигналы для определения времени прихода.
Существует также вариант изобретения, в котором каждый блок кодирования сигналов выполнен с возможностью формирования периодических кодированных сигналов, которые разделены частотно и разнесены по времени. Благодаря данной выгодной характеристике появляется возможность отделить сигналы от разных гидроакустических буев друг от друга, исключив ошибки.
Существует также и такой вариант изобретения, в котором каждый приемник гидроакустических сигналов с указанных гидроакустических буев имеет температурно-компенсированный датчик глубины.
Благодаря данной выгодной характеристике появляется возможность упростить все вычисления за счет того, что исходящие сигналы испускаются строго на одной глубине, что снижает вероятность ошибок при вычислениях, ускоряет процесс вычисления и снижает нагрузку на вычислительный модуль подводного объекта. При навигации подводного объекта производится определение только широты и долготы, глубину становится возможным определять по температурно-компенсированному датчику глубины.
Совокупность существенных признаков предлагаемого изобретения как устройства неизвестна из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения как устройства.
Краткое описание чертежей.
Другие отличительные признаки и преимущества данной группы изобретений ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
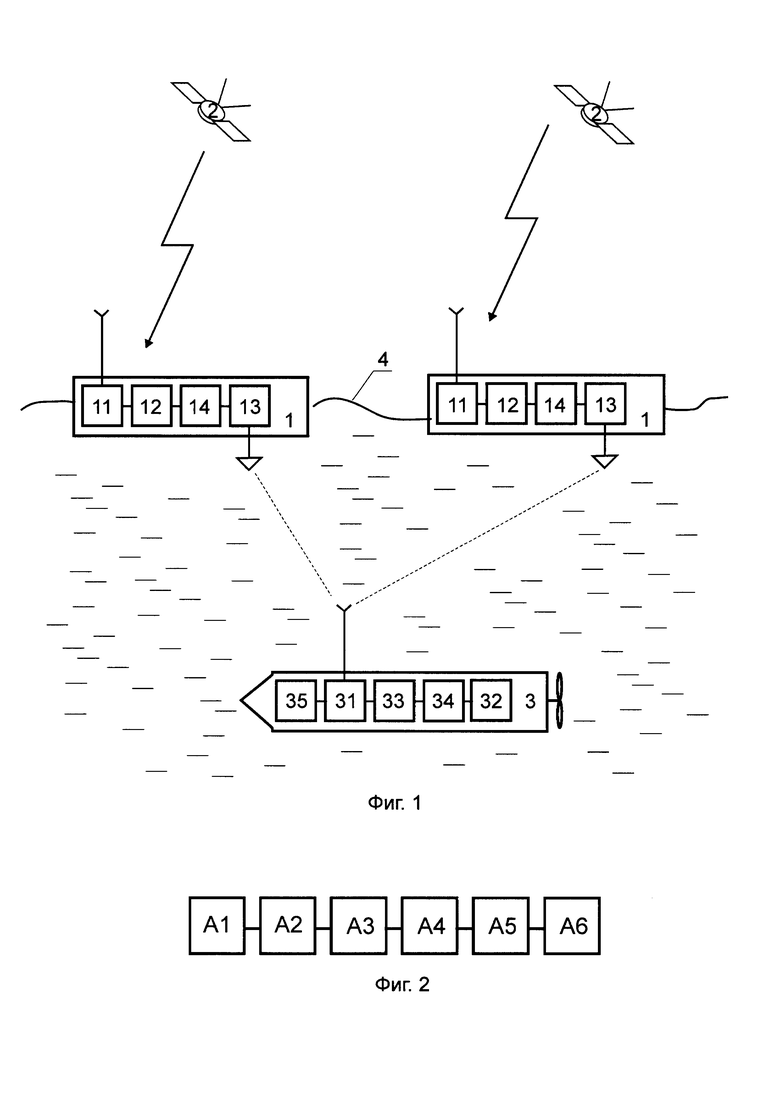
- фигура 1 изображает функциональную схему системы навигации подводных объектов согласно изобретению,
- фигура 2 схематично изображает этапы способа навигации подводных объектов согласно изобретению.
Согласно фигуре 1 система навигации подводных объектов включает в себя гидроакустические буи 1, имеющие приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 гидроакустического буя, который соединен с передатчиком 13 гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев и их идентификационные данные. Система также включает в себя расположенный на подводном объекте 3 приемник 31 гидроакустических сигналов с указанных гидроакустических буев 1, соединенный с вычислительным модулем 32 подводного объекта, выполненным с возможностью определения координат подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев 1, местоположение которых известно.
Каждый гидроакустический буй 1 содержит соединенный с вычислительным модулем 12 гидроакустического буя блок 14 кодирования сигналов, выполненный с возможностью формирования кодированного периодического сигнала, привязанного к часам GPS/ГЛОНАСС. Все передатчики 13 гидроакустических сигналов расположены на одной глубине. Каждый приемник 31 гидроакустических сигналов с указанных гидроакустических буев имеет блок декодирования 33 сигналов от гидроакустических буев и связанный с ним модуль 34, выделяющий прямые сигналы от гидроакустических буев от отраженных и позволяющий фиксировать время прихода только прямого сигнала. Каждый модуль 34, выделяющий прямые сигналы от гидроакустических буев от отраженных, выполнен в виде рейк-приемника.
Каждый блок 14 кодирования сигналов может быть выполнен с возможностью формирования периодических кодированных сигналов, которые разделены частотно и разнесены по времени.
Каждый приемник 31 гидроакустических сигналов с указанных гидроакустических буев может иметь температурно-компенсированный датчик глубины 35.
В системе может быть использовано три гидроакустических буя 1. Но три гидроакустических буя - это минимум теоретический, поскольку в гиперболической навигации все работает на разностях времен прихода, очень легко попасть в ситуацию так называемую «работы на асимптотах», когда разности времен прихода стремятся к нулю и целевая функция, которую следует оптимизировать, имеет множество ложных минимумов. Для этого предлагается использовать вариант системы, когда использовано четыре гидроакустических буя. Четвертый гидроакустический буй позволяет ситуацию выправить во многих случаях. (Можно использовать систему из пяти гидроакустических буев, но это уже не имеет смысла, так как выигрыш не столь велик, сколь велико усложнение установки гидроакустических буев, общий размер системы и прочее.)
Энергетическая дальность связи в предлагаемой системе определяется центральной частотой и может составлять 3000 метров, то есть гидроакустические буи друг от друга могут быть поставлены не далее 1500 метров. Предполагается работать между ними, так как обычно подводные работы ведутся в гораздо меньших акваториях.
На фигуре 1 дополнительно позицией 4 обозначена граница жидкой и атмосферной сред, пунктирами - распространение сигналов от гидроакустических буев до приемника подводного объекта.
Осуществление изобретения.
Система навигации подводных объектов работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду что данный пример не ограничивает применения изобретения.
Согласно фигуре 2:
Этап А1. Предварительно на поверхности воды устанавливают гидроакустические навигационные буи 1, имеющие приемник 11 сигналов со спутников 2, соединенный с вычислительным модулем 12 гидроакустического буя, который соединен с передатчиком 13 гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев 1 и их идентификационные данные. Причем гидроакустические навигационные буи 1 оснащены приемниками 11 глобальной спутниковой навигационной системы, которые привязаны к часам, синхронизированным по GPS/GLONASS. Поскольку гидроакустические буи 1 постоянно обновляют свои координаты, они могут быть как дрейфующими, так и устанавливаемыми на якорь.
Этап А2. Располагают все передатчики 13 гидроакустических сигналов на одной глубине.
Этап A3. Имея точно синхронизированные часы, гидроакустические буи 1 одновременно или по очереди в определенные моменты времени циклически передают свои географические координаты через гидроакустический канал с кодовым, и/или временным, и/или частотным разделением. Для определения местоположения позиционируемого подводного объекта 3 на поверхности воды должно быть установлено не менее четырех гидроакустических буев.
Этап А4. Используют метод гиперболической навигации, при котором любая пара передатчиков 13 гидроакустических сигналов, имеющая синхронизированные часы, позволяет определить по временам прихода излучаемых ими сигналов расположение приемника 31 на гиперболе, так как геометрическое место точек (позиций) приемника 31, в которых будет наблюдаться данная величина разности времен прихода сигналов от двух передатчиков 13, есть гипербола. При этом три такие неповторяющиеся пары позволяют однозначно определить приемник 31 на плоскости, а соответственно и связанный с ним подводной объект 3, определив его местоположение как пересечение трех гипербол.
Этап А5. Присваивают каждому гидроакустическому бую 1 свой идентификатор, позволяющий приемнику 31 отличить его от остальных и, таким образом, явно сопоставить переданные им географические координаты и момент прихода сигнала (ТОА) с данным гидроакустическим буем. Например, при совмещенном временном и кодовом разделении гидроакустических буев, позволяющем построить наиболее эффективную систему, гидроакустические буи анализируют передаваемую встроенными GPS/GLONASS приемниками 11 информацию, в которой содержится точное время и географические координаты. Имея точно синхронизированные часы, они излучают навигационный сигнал каждый в свое время, например гидроакустический буй №1 излучает в первую секунду минуты, гидроакустический буй №2 излучает во вторую секунду, гидроакустический буй №3 излучает в третью, гидроакустический буй №4 - в четвертую и так далее. При такой организации навигационный приемник 31 подводного объекта может вычислять собственное положение раз в четыре секунды по факту определения времен прихода от всех четырех гидроакустических буев. Кодовое разделение позволяет избежать взаимного влияния навигационных сигналов гидроакустических буев и дополнительно позволяет различать гидроакустические буи приемнику 31 подводного объекта в случае такого их взаимного расположения, при котором существует возможность прихода сигналов от, например, гидроакустического буя №2 раньше, чем от гидроакустического буя №1.
Этап А6. При этом с помощью навигационного приемника 31, установленного на позиционируемом подводном объекте 3, постоянно принимают сигналы гидроакустических буев 1, демодулируют сигналы, передаваемые гидроакустическими буями, и фиксируют времена прихода посылок (ТОА), поскольку сигналы разделены кодово и/или по времени и известно, что они были переданы синхронно или через известные промежутки времени, а также известны координаты гидроакустических буев.
Принимая во внимание, что подводный объект оборудован датчиком глубины, соединенным с навигационным приемником, то, имея как минимум четыре времени прихода от точек с известными географическими координатами и имея данные о собственной глубине, с помощью соединенного с навигационным приемником вычислительного модуля 32 подводного объекта вычисляют собственные географические координаты так называемым разностно-дальномерным методом. При этом в случае временного разделения навигационных сигналов буев стабильность внутренних часов навигационного приемника 31 требуется только в течение короткого промежутка, в течении которого принимаются посылки от всех гидроакустических буев.
Последовательность этапов является примерной и позволяет переставлять, убавлять, добавлять или производить некоторые операции одновременно без потери возможности обеспечивать навигацию подводных объектов.
Промышленная применимость.
Предлагаемый способ и система навигации подводных объектов могут быть осуществлены специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением изготовлен опытный образец системы навигации подводных объектов. Он состоял из четырех гидроакустических буев и трех приемников навигационного акустического сигнала, были проведены испытания при следующих параметрах системы:
- гидроакустические буи располагались в квадрате 500×500 метров,
- каждый приемник был выполнен в виде отдельного устройства на кабеле, по которому подавалось питание на устройство и происходил информационный обмен,
- приемники были жестко зафиксированы на разных удалениях от буев (внутри квадрата) и на разных глубинах: 3, 5 и 12 метров. Длительность проведения эксперимента составила 2.5 часа,
- частота обновления навигационных данных составила 0.25 Гц (1 раз в 4 секунды);
Место проведения испытаний: устье реки «Пичуга», Волгоградская область. Максимальная глубина водоема: 25 метров, песчано-илистое дно.
Испытания опытного образца системы навигации подводных объектов показали, что она обеспечивает возможность:
- точного определения координат подводного объекта, а именно долготы и широты, по полученным сигналам, в частности среднеквадратичное отклонение географической позиции в метрах составило 0.48 метров по результатам для трех навигационных приемников, работающих непрерывно в течение 2.5 часов;
- определения глубины подводного объекта по датчику глубины;
- независимости от интерферирования сигналов;
- определения именно прямых сигналов и избегания, таким образом, ошибки в определении координат из-за обработки отраженных сигналов.
Все это позволяет значительно повысить точность навигации подводных объектов.
Дополнительным полезным техническим результатом заявленного изобретения является то, что оно позволяет:
- выполнять позиционирование неограниченного числа подводных объектов одновременно,
- при этом навигационный приемник работает только в пассивном режиме, не создавая дополнительно акустических помех.
Таким образом, в данном изобретении достигнута поставленная задача - повышение точности навигации подводных объектов. Кроме того, перечисленные выше преимущества показывают высокую эффективность применения предлагаемого способа и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691212C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2659299C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529207C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691217C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
Данная группа изобретений относится к способам и системам навигации подводных объектов, а именно к способам и системам, когда принимают посредством расположенных на гидроакустических буях приемников сигналы со спутников, определяют координаты гидроакустических буев посредством вычислительных модулей гидроакустических буев, передают данные о местоположении и идентификационные данные в виде гидроакустических сигналов, излучаемых передатчиками гидроакустических буев, принимают сигналы с помощью расположенного на подводном объекте приемника, определяют координаты подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно. Данное решение может быть использовано при одновременном определении географического положения неограниченного числа подводных мобильных объектов, дистанционно управляемых подводных аппаратов, водолазов, морских животных и т.д. в процессе движения. Согласно изобретению кодируют сигналы с указанных гидроакустических буев в виде периодических сигналов, привязанных к часам GPS/ГЛОНАСС, располагают все передатчики гидроакустических сигналов на одной глубине, декодируют сигналы от гидроакустических буев при одновременном выделении прямых сигналов от гидроакустических буев от отраженных. Система реализует указанный способ. Достигаемый технический результат - повышение точности навигации подводных объектов. 2 н. и 3 з.п. ф-лы, 2 ил.
1. Способ навигации подводных объектов, при котором
- принимают посредством расположенных на гидроакустических буях приемников сигналы со спутников,
- определяют координаты гидроакустических буев посредством вычислительных модулей гидроакустических буев,
- передают данные о местоположении указанных гидроакустических буев и их идентификационные данные в виде гидроакустических сигналов, излучаемых передатчиками гидроакустических буев,
- принимают сигналы с помощью расположенного на подводном объекте приемника гидроакустических сигналов,
- определяют координаты подводного объекта с помощью вычислительного модуля подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно,
- отличающийся тем, что
- кодируют сигналы с указанных гидроакустических буев в виде периодических сигналов, привязанных к часам GPS/ГЛОНАСС,
- располагают все передатчики гидроакустических сигналов на одной глубине,
- декодируют сигналы от гидроакустических буев при одновременном выделении прямых сигналов от гидроакустических буев от отраженных.
2. Способ по п. 1, отличающийся тем, что при кодировании сигналов разделяют их частотно и разносят по времени.
3. Система навигации подводных объектов, включающая в себя гидроакустические буи, имеющие приемник сигналов со спутников, соединенный с вычислительным модулем гидроакустического буя, который соединен с передатчиком гидроакустических сигналов, содержащих данные о местоположении указанных гидроакустических буев и их идентификационные данные, система также включает в себя расположенный на подводном объекте приемник гидроакустических сигналов с указанных гидроакустических буев, соединенный с вычислительным модулем подводного объекта, выполненным с возможностью определения координат подводного объекта по задержке времени приема гидроакустических сигналов от гидроакустических буев, местоположение которых известно, отличающаяся тем, что каждый гидроакустический буй содержит соединенный с вычислительным модулем гидроакустического буя блок кодирования сигналов, выполненный с возможностью формирования кодированного периодического сигнала, привязанного к часам GPS/ГЛОНАСС, при этом все передатчики гидроакустических сигналов расположены на одной глубине, а каждый приемник гидроакустических сигналов с указанных гидроакустических буев имеет блок декодирования сигналов от гидроакустических буев и связанный с ним модуль, выделяющий прямые сигналы от гидроакустических буев от отраженных и позволяющий фиксировать время прихода только прямого сигнала, причем каждый модуль, выделяющий прямые сигналы от гидроакустических буев от отраженных, выполнен в виде Рейк-приемника.
4. Система по п. 3, отличающаяся тем, что каждый блок кодирования сигналов выполнен с возможностью формирования периодических кодированных сигналов, которые разделены частотно и разнесены по времени.
5. Система по п. 3, отличающаяся тем, что каждый приемник гидроакустических сигналов с указанных гидроакустических буев имеет температурно-компенсированный датчик глубины.
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| СЕПАРАТОР УПОРНОГО РОЛИКОВОГО ПОДШИПНИКА | 0 |
|
SU129075A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| US5331602 A, 19.07.1994. | |||

