Изобретение относится к области геофизической разведки, высокоточной навигации, геологии. В частности, предлагаемое изобретение относится к области подводной навигации и может быть применено при определении географических координат глубоководных буксируемых комплексов в процессе проведения морских геолого-геофизических исследований.
Например, изобретение относится к области гидроакустических навигационных систем, позволяющих определить пространственные географические координаты подвижного объекта при его перемещении под поверхностью воды. Предложенное изобретение позволяет точнее и надежнее определить выходные навигационные параметры движущегося объекта. В частности, предлагаемая система включает навигационные измерительные устройства, использующие методы измерения в базовой и геологической системах координат объекта. В качестве базовой системы координат выбирают выносную измерительную базу для определения координат движущегося за судном объекта.
Известны несколько типов систем определения координат подводных объектов с помощью гидроакустики, отличающиеся между собой размерами базовых линий (измерительных баз), которые представляют собой расстояния между гидроакустическими антеннами, образующими измерительную решетку. Это системы с короткой базой (Short Baize Line), системы со сверхкороткой базой (Ultra Short Baize Line), системы с длинной базой (Lounge Baize Line).
Системы со сверхкороткой базой относятся к угломерным системам, в которых направление на объект определяется путем измерения разности фаз между элементами антенны, образованной как минимум двумя гидроакустическими преобразователями, установленными в одном корпусе на расстояниях друг от друга менее длины волны несущего колебания, которое составляет сантиметры. Однако данные системы подвержены влиянию шумов судна, за счет чего снижается точность определения координат.
Системы с короткой базой относятся к так называемым разностно-дальномерным системам, в которых координаты подводного объекта вычисляются по разности времен прихода передних фронтов импульсов, излучаемых гидроакустическим преобразователем с подводного объекта на три гидроакустических преобразователя, расположенных под водой и образующих две пересекающиеся базы. Точность определения координат зависит от длины базы, которая для систем с короткой базой ограничена размерами судна и составляет около 20 метров. Эти системы также подвержены влиянию шумов судна, и, кроме того, оборудование судна спускоподъемными устройствами с гидроакустическими антеннами для формирования короткой базы требует выполнения большого объема дорогостоящих работ при постановке судна в док. При этом базовые линии необходимо точно юстировать относительно диаметральной плоскости судна. Точность определения координат снижается также из-за неточности в ориентации базовых линий, а также из-за необходимости учета случайных ошибок, возникающих из-за крена и дифферента судна. Практическая дальность действия систем с короткой базой ограничивается расстоянием в 1-2 км.
Наиболее близкими к заявляемому техническому решению являются системы с длинной базой, они относятся к дальномерным системам, в которых местоположение подводного объекта вычисляется по результатам измерения расстояний между подводным объектом и как минимум тремя маяками-ответчиками, установленными в различных точках морского дна на расстояниях в несколько километров друг от друга. Координаты маяков-ответчиков определяются в процессе прохождения судна в районе их постановки путем измерения расстояний до маяков и одновременным измерением собственных координат судна по данным GPS. Буксируемый комплекс посылает и принимает ответные данные от маяков-ответчиков и передает их по кабель-тросу на судно.
Известно изобретение «Способ расширения использования GPS под водой», патент US №5119341, опубликован 06.02.1992, МПК Н04В 001/59, в соответствии с которым в различных точках заданного района работ на поверхности моря устанавливаются свободно дрейфующие буи, образующие систему с длинной базой. Каждый буй имеет в своем составе навигационный приемник системы GPS и гидроакустическую систему с преобразователем, заглубленным под поверхностью моря. Измеренные каждым буем собственные координаты передаются на подводный аппарат. Гидроакустическая система на подводном аппарате, получив данные о расстояниях до каждого буя и их координаты, вводит эту информацию в вычислительное устройство, которое определяет координаты подводного аппарата непосредственно на его борту. Однако подводный аппарат знает собственные координаты, но с судна невозможно отслеживать его местоположение. Недостатком также является передача большого объема данных по гидроакустическому каналу связи с каждого из буев.
Наиболее близким к предлагаемому изобретению является изобретение «Способ и устройство для мониторинга и удаленного контроля беспилотного мобильного подводного устройства», патент US №5579285, опубликованный 08.21.1995, международная публикация №W0 94/14081 от 06.23.1994, МПК G01S 005/00; G01S 005/14; G01S 011/14, в соответствии с которым в различных точках поверхности моря устанавливаются дрейфующие буи, образующие длинную базу. Каждый буй в своем составе имеет навигационный приемник GPS, часы, синхронизированные с часами GPS, гидроакустическую приемную систему с заглубленным преобразователем и радиомодем. Такие буи получили название GIB буи, а технология их применения - GIB технология (GIB - global intelligent buoy). Каждый буй измеряет собственные координаты и времена запаздывания в предустановленные моменты времени передает вместе с координатами в стандарте NMEA по радиоканалу через радиомодем на судно. По данным принятых времен запаздывания сигналов пингера с учетом скорости звука в воде на борту судна вычисляются расстояния от подводного объекта до каждого из буев, и по известному алгоритму вычисляются и отображаются координаты подводного объекта и координаты всех буев. Однако для определения координат глубоководных буксируемых комплексов в этом случае требуется большое количество буев, так как траектория буксировки, как правило, имеет значительную протяженность. Кроме того, дрейфующие буи могут быть снесены из района работ на расстояния, превышающие дальность действия гидроакустической системы и радиомодемов.
Технической задачей предложенного изобретения является обеспечение проведения глубоководных исследований с помощью буксируемого объекта путем высокоточной привязки его местоположения к географическим координатам на всем протяжении буксировки. При этом расстояние между судном и буксируемым измерительным комплексом может достигать несколько километров, а траектория движения судна не совпадать с траекторией движения буксируемого комплекса. В этом случае с помощью системы определения координат требуется точно, на протяжении всех исследований определять координаты движущегося подводного объекта, например, глубоководных буксируемых комплексов, участвующих в геологоразведке.
Существующие измерительные системы с длинной или с короткой базой требуют установки стационарных буев и/или спускоподъемных устройств с гидроакустическими антеннами на судах, что приводит к проведению дорогостоящих работ. Так, определение координат точек постановки маяков-ответчиков занимает до 8 часов судового времени на один маяк и обходится очень дорого. Значительные затраты судового времени расходуются на постановку, всплытие и подъем на борт судна маяков-ответчиков. Установка спускоподъемных устройств с гидроакустическими антеннами требует проведения дорогостоящих работ с постановкой судна в док.
С помощью предложенного изобретения могут быть уменьшены ошибки определения координат за счет исключения судна из гидроакустического тракта, т.е. исключения влияния шумов судна, что положительно влияет на устойчивый прием сигналов. Также может быть повышена точность определения координат за счет уменьшения случайных ошибок измерения, увеличения измерительной базы (в пределах, обеспечивающих условия измерения). Предложенное техническое решение позволяет исключить ограничивающие условия определения координат из-за неблагоприятного геометрического (пространственного) расположения буксируемого подводного объекта, например, в случае, если объект находится около дна. To есть во всех случаях маяки находятся всегда в зоне видимости. Основным техническим результатом является обеспечение постоянного пространственного нахождения внутри измерительной базы системы при любых протяженных траекториях перемещения объекта, при этом маяки не надо переставлять, а следовательно, обеспечивается уменьшение количества устанавливаемых буев независимо от протяженности траектории объекта.
Таким образом, техническим результатом является повышение точности измерений при повышении надежности и удешевлении системы за счет уменьшения количества буев независимо от протяженности траектории объекта.
Заявленный технический результат обеспечивается за счет системы определения координат подводных объектов. Задача решается следующим образом. Система определения координат содержит систему из буксируемого объекта 1 и буев 2, расположенных на поверхности моря, в которой буи выполнены как часть системы в количестве не менее трех, снабжены радионавигационным приемником GPS (Global Positioning System) 3, высокостабильными часами 4, предварительно синхронизированными по часам GPS (Global Positioning System), гидроакустической приемной системой 5, выделяющей и принимающей сигнал пингера 6, контроллером - измерителем временных интервалов 7. Система отличается тем, что она снабжена буксирующим объектом 8, включает буксируемый подводный объект 1 и буи 2, выполненные как единая система с буксируемым объектом, которую на всем протяжении трассы перемещают буксирующим объектом 8, сохраняя соотношение размеров измерительной базы L системы, при этом буи и буксируемый объект закреплены, например, тросами 9 заданной длины к буксирующему объекту, образуя систему с расчетной измерительной базой, буи снабжены неподвижными рулями, предварительно установленными на заданный угол α, и преобразователем 10, размещенным под поверхностью моря, буксируемый объект снабжен пингером 6, излучающим гидроакустический сигнал в предустановленные моменты времени, при этом буксируемый объект 1 размещен таким образом, чтобы проекция его находилась внутри координатной сетки, образованной буями 2 на поверхности моря. В качестве буев могут быть использованы GIB буи (Global Intelligent Buoy). В качестве буксирующего объекта может быть использовано судно или иной движущийся объект. В качестве буксируемого объекта может быть использован глубоководный геофизический комплекс ROV (Remote Operate Vestige). В качестве измерительной базы может быть взята длинная измерительная база (LBL), при этом буксируемый объект снабжают высокостабильными часами, предварительно синхронизированными по часам GPS (Global Positioning System) с высокостабильными часами каждого буя. Или в качестве измерительной базы может быть взята короткая измерительная база (SBL), при этом буксируемый объект снабжают устройством определения глубины погружения буксируемого объекта. Система, например, включает ЭВМ, которая, например, размещена на судне 1 или на любой стационарной базе. ЭВМ осуществляет расчет координат буксируемого объекта либо на основе длинной измерительной базы, либо на основе короткой измерительной базы, либо одновременно на основе короткой и длинной измерительных баз. Буксируемый объект может быть снабжен радиомодемом или соединен с судном кабель-тросом. Буи могут быть снабжены радиомодемами или соединены с буксирующим объектом кабель-тросами.
Сущность изобретения отображена на чертежах, иллюстрирующих систему определения координат подводных объектов.
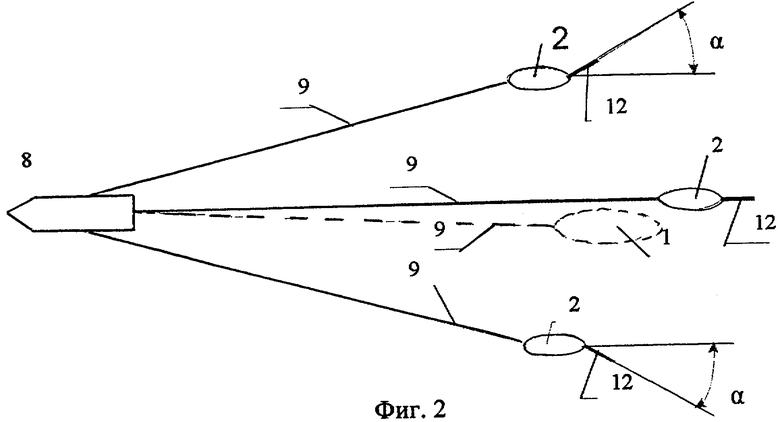
На Фиг.1 изображена общая схема системы определения координат в аксонометрии.
На Фиг.2 изображена проекция системы определения координат на поверхности моря.
Сущность изобретения поясняется на Фиг.1, где 8 - судно-буксировщик, 2 - GIB буи на морской поверхности, 1 - буксируемый глубоководный комплекс, 6 - пингеры, 9 - буксирующий кабель-трос или буксирные тросы GIB буев, R1, R2, R3 - горизонтальные расстояния между буями на поверхности моря, формирующие измерительную базу гидроакустической навигационной системы, L1, L2, L3 - наклонные дальности от, например, глубоководного буксируемого комплекса (1) до гидроакустического преобразователя (10) каждого из GTB буев, L1*, L2*, L3* - проекции наклонных дальностей на поверхность моря, А - точка проекции глубоководного буксируемого комплекса на поверхность, 11 - созвездие навигационных спутников системы GPS.
Гидроакустический преобразователь - пингер 6 на глубоководном буксируемом комплексе 1 по сигналу часов, синхронизированных с часами GIB буев 2, в предустановленный момент времени излучает импульс. Этот импульс, принимаемый каждым гидроакустическим преобразователем GIB буев 10, запаздывает относительно предустановленного момента излучения, хранящегося в часах буев, на величину, пропорциональную наклонным дальностям от глубоководного буксируемого комплекса до каждого из буев. Измеренное время запаздывания, пропорциональное наклонным дальностям, совместно с собственными координатами, полученными по данным GPS, каждый буй передает на судно через радиомодем или кабель-трос. Бортовой радиомодем или бортовая аппаратура принимает координаты каждого буя, времена запаздывания сигналов пингера 6 и вводит эту информацию в персональный компьютер, где по известному алгоритму вычисляются координаты глубоководного буксируемого комплекса.
На Фиг.2 изображено в плане взаимное расположение судна 8, буксируемых GSB буев 2 и глубоководного комплекса 1, 9 - буксирующий кабель-трос глубоководного комплекса или буксирующие тросы GIB буев, 12 - рули GIB буев, у которых установлены рули на угол α.
Система работает следующим образом.
Одновременно с буксировкой глубоководного комплекса 1 буксируется на поверхности моря система из трех GIB буев 2, образующих систему с измерительной базой. Для формирования длинной или короткой измерительной базы системы каждый буй снабжается рулем, с помощью которого каждый буй в процессе буксировки занимает требуемое положение на морской поверхности в зависимости от длины буксирующего троса 9, скорости буксировки и фиксированного, заранее установленного положения руля. При этом неизбежные изменения положения буев в буксируемой системе определения координат под влиянием внешних условий и параметров буксировки несущественны, так как текущие координаты каждого буя передаются радиомодемами буев с заданным периодом времени, измеряемым единицами секунд. Применение такой системы позволяет сохранять положение проекции глубоководного буксируемого комплекса внутри координатной сетки, образованной буями на поверхности моря. Такое положение поддерживает наиболее благоприятные акустические условия для обеспечения высокой точности определения координат на всем протяжении буксировки. Буксировка системы определения координат, или гидроакустической навигационной системы, позволяет практически избежать влияния собственных шумов судна на дальность и точность определения координат. Требуются всего три буя независимо от протяженности трассы буксировки, а затраты судового времени на определение координат местоположения буев, образующих измерительную базу, отсутствуют. При этом в качестве буксировщика может использоваться любое арендуемое судно, и нет необходимости оборудовать его гидроакустической навигационной системой. Буи легко устанавливаются на морскую поверхность и легко выбираются на борт судна. Необходимо отметить, что передача информации с буев на судно может производиться не только по радиолинии с помощью радиомодемов, но и по кабель-тросу, которым можно буксировать каждый буй. В этом случае радиомодемы на буях и на судне могут отсутствовать, а синхронизация часов буев и пингера производится по кабель-тросам через бортовую аппаратуру судна.
Расчет координат измеряют как на основе длинной измерительной базы, так и на основе короткой измерительной базы, при этом реализован пространственный принцип измерения, на основе определения расстояний, определенных гидроакустическим методом с определением универсальной характеристики для длинномерных и короткомерных баз - времени запаздывания гидроакустического сигнала относительно синхроимпульса излучения.
В случае расчета координат на основе длинной измерительной базы (R1, R2, R3), расчет ведется по времени запаздывания, когда измеряют дальность прохождения гидроакустического сигнала от буксируемого объекта до маяка. При этом буксируемый объект снабжают высокостабильными часами, предварительно синхронизированными по часам GPS (Global Positioning System) с высокостабильными часами каждого буя.
В случае расчета координат на основе короткой измерительной базы (R1, R2, R3) расчет ведется по времени запаздывания, когда измеряют разность дальностей прохождения гидроакустического сигнала пингера, проходящего по направлению к бую. При этом буксируемый объект снабжают устройством определения глубины погружения буксируемого объекта.
Таким образом, предлагается более универсальный способ определения координат, т.к. возможно проводить как измерения на основе длинной базы, так и на основе короткой базы. Причем при короткой базе синхронизация сигналов не требуется. При этом короткая измерительная база имеет размеры, не менее чем на порядок большие, чем короткая измерительная база, традиционно сформированная на судне.
Иными словами, для короткой базы используют разностно-дальнюю систему измерения (Short Baize Line), а для длинной базы - дальномерную систему измерения (Lounge Baize Line).
И в том, и в другом случае принципом расчета является определение координат по расстоянию от объекта до буя через координаты буя, рассчитанные в географической системе координат GPS.
В результате достигают заявленный технический результат.
Кроме того, не требуется проводить длительную и дорогостоящую калибровку маяков-ответчиков. За счет уменьшения объема данных, которые должны быть переданы по гидроакустическому каналу, достигается также повышение точности мониторинга.
Благодаря тому, что обновление информации увеличивается в 2 раза, т.е. за счет увеличения частоты обновления информации о координатах маяков-ответчиков можно добиться более точного во времени измерения и осуществления мониторинга.
Также повышается качество принимаемого сигнала за счет исключения шумов судна, улучшается характеристика измерения - соотношение сигнал - шум.
Вся система существенно удешевляется за счет исключения дорогостоящего оборудования и сложных подготовительных работ на судне.
Кроме того, исключают ограничивающие условия определения координат из-за неблагоприятного геометрического (пространственного) расположения объекта, например, в случае, если объект находится около дна. Во всех случаях буи находятся всегда в зоне видимости.
Предложенное техническое решение обеспечивает постоянное пространственное нахождение внутри измерительной базы системы при любых протяженных траекториях перемещения объекта, при этом буи-маяки не надо переставлять. Это приводит к уменьшению количества устанавливаемых буев независимо от протяженности траектории подводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ | 2014 |
|
RU2568071C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529207C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА | 2012 |
|
RU2507532C2 |
Изобретение относится к области подводной навигации и может быть применено при определении географических координат глубоководных буксируемых комплексов в процессе проведения морских геолого-геофизических исследований. Техническим результатом является повышение точности и надежности определения координат подводного объекта. Для его достижения создают буксируемую судном координатную систему с длиной базы 2-3 километра, причем каждый GPS буй с встроенной гидроакустической системой, составляющий основу координатной системы, связан с судном при помощи своего кабель-троса, что позволяет, корректируя длину троса, сохранять соотношения длин координатной системы в процессе буксировки, т.е. удерживать глубоководный буксируемый комплекс в зоне, наиболее благоприятной для высокоточных измерений. Буи могут передавать информацию на судно при помощи радиосвязи или кабель-троса. 4 з.п. ф-лы, 2 ил.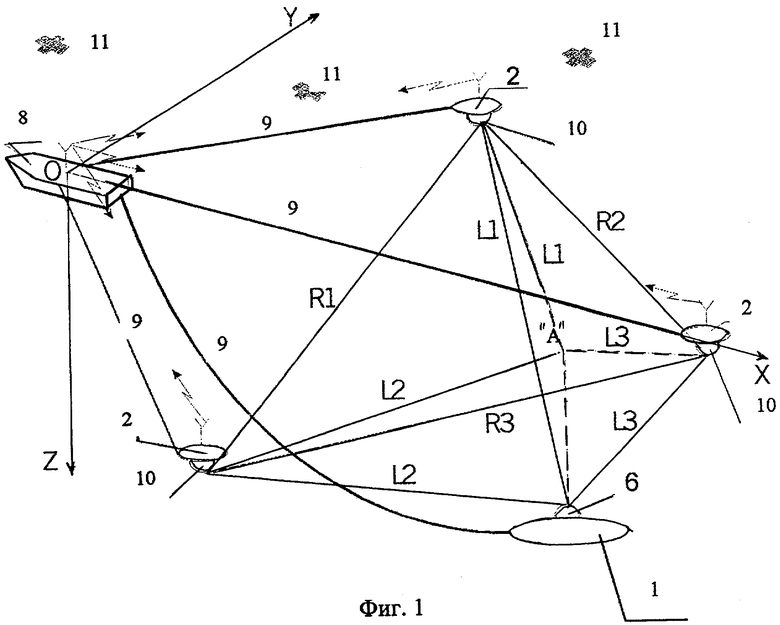
| US 6501704 В2, 31.12.2002 | |||
| US 5579285, 26.11.1996 | |||
| Экономайзер | 0 |
|
SU94A1 |
| Устройство для контроля положения челнока в челночной коробке ткацкого станка | 1972 |
|
SU518146A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5616059, 01.04.1997 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 6009042, 28.12.1999 | |||
| JP 2002250766 A, 06.09.2002 | |||
| US 6657585 B1, 02.12.2003 | |||
| US 5119341, 02.06.1992 | |||
| СИНТАКСИЧЕСКАЯ СТРУКТУРА ПАРАМЕТРОВ ГИПОТЕТИЧЕСКОГО ЭТАЛОННОГО ДЕКОДЕРА | 2013 |
|
RU2643463C2 |
| JP 4359181 A, 11.12.1992 | |||
| JP | |||

