Изобретение относится к способам навигации подводных объектов, конкретно к способам определения местонахождения подводных автономных объектов (ПО) относительно гидроакустических маяков.
Как правило, позиционирование осуществляют путем измерения дистанций между ПО и гидроакустическими маяками (ГМ) по времени прохождения акустического сигнала между ними, причем координаты маяков и необходимые для расчета дистанции данные о величине скорости звука предварительно вводятся в память бортовой навигационной системы, а работа маяков и бортового устройства вычисления координат ПО синхронизируются или маяки излучают акустические сигналы по запросу ПО. Для позиционирования по гидроакустическим маякам подводных объектов с повышенной автономностью и увеличенной дальностью хода используют навигационные системы с длинной базой (LBL) - дальномерные и дальномерно-пеленгационные. Дальномерные включают, как минимум, три, а дальномерно-пеленгационные, как минимум, два установленных на акватории гидроакустических маяка, которые обычно излучают импульсные сигналы по сигналу запроса со стороны ПО. В случае одновременной работы на акватории нескольких ПО для исключения взаимных помех используют маяки, работающие не по запросу ПО, а по заранее заданной программе (Гидроакустические навигационные средства. В.И.Бородин и др. - Л.: Судостроение, 1983. - 264 с.). ГМ обычно выставляют и позиционируют в районе предполагаемых работ, при смене района их переустанавливают и вновь позиционируют, а по окончании работ снимают. Позиционирование по ГМ является стандартной процедурой, реализуемой навигационным комплексом ПО, имеющим другие навигационные подсистемы, не требует знаний рельефа дна и обеспечивает приемлемую точность решения навигационных задач.
Для объектов, находящихся на поверхности воды, повышение точности позиционирования в настоящее время обеспечивается использованием спутниковой навигационной системы.
Известен способ определения положения подводного объекта, включающий расстановку на акватории дрейфующих буев, определение координат буев по спутниковой навигационной системе GPS, преобразование полученных координат в гидроакустические сигналы и передачу их на ПО, где бортовое устройство вычисления координат обеспечивает позиционирование на основе полученных координат буев и вычисления дистанции до них исходя из времени распространения сигнала и скорости звука в среде (патент США № 5119341).
Известен способ позиционирования подводного объекта, где реализуется двусторонняя гидроакустическая связь между буями и подводным объектом (патент США №5579285).
В последние годы появился принципиально новый способ позиционирования, который использует основные принципы построения стандартных навигационных систем с длинной и короткой базами (LBL и SBL) с одновременным сопоставлением координат с сигналами DGPS (дифференциальная система GPS, выдающая координаты объекта с точностью до 0,5 м, за счет корректировки сигналов GPS на основе данных стационарной наземной станции).
Французская компания ACSA предложила использовать несколько плавающих буев с гидроакустическими антеннами и приемниками DGPS для получения координат подводного аппарата, снабженного гидроакустическим приемоответчиком - GIB система, от английского GIB Intelligent Buoys (http://underwater-gps.com/uk/technology-GIB-concept.php). Акустические системы и приемник DGPS на каждом буе работают в строгой синхронизации по времени и посылают полученные данные в УКВ диапазоне на центральный модуль, обычно установленный на судне-носителе, для их дальнейшей обработки. Способ обеспечивает очень высокую точность определения абсолютных координат подводного объекта (до 0,5 м), мобильность (расстановка буев занимает менее 30 минут и выполняется с резиновой лодки), возможность быстрой транспортировки и установки на различных типах судов-носителей, а также возможность работать на малых глубинах (5-15 метров).
Недостатками данных способов является необходимость передачи большого объема данных по гидроакустическому каналу, что ограничивает количество одновременно позиционирующихся ПО, малая (до 500 м) дальность действия способа, зависимость точности позиционирования ПО от метеоусловий ввиду возможного нарушения схемы расстановки буев, находящихся в дрейфе, невозможность эксплуатации навигационной системы при неблагоприятных метеоусловиях, а также ограничение числа одновременно работающих с навигационной системой ПО и отсутствие скрытности выполнения работ в районе.
Наиболее близким к заявляемому способу позиционирования подводного объекта (ПО) является способ, который включает установку в морской среде, как правило на дне, по меньшей мере одной базовой станции (ГМ), каждая из которых оборудована не менее чем двумя синхронизированными друг с другом и ПО гидроакустическими излучателями, образующими антенну с известными ориентацией в пространстве и расстоянием между излучателями, излучение ими акустического сигнала, его прием акустическим приемником подводного объекта и последующее позиционирование ПО путем расчета бортовым вычислительным устройством ПО дистанции до базовых станций и направления на них по разности времен приходов и разности фаз принятых сигналов (WO 2009138662, МПК G01S 3/80).
Недостатками данного способа являются: его сложность, проявляющаяся в необходимости формирования антенн из излучателей базовых станций, точного измерения расстояния между излучателями, определения ориентации антенн, определения бортовым вычислительным устройством координат ПО не только дистанции до излучателей, но и фазы сигналов, пришедших на приемник ПО; недостаточная дальность действия, связанная с ограничением по нижней рабочей частоте ввиду недопустимости разнесения излучателей в антенне базовой станции на расстояние более 0,5 длины волны сигнала; невозможность корректировки позиционирования ПО при изменении скорости звука на акватории во время выполнения работ; ограничение числа одновременно работающих с базовой станцией ПО и отсутствие скрытности выполнения работ в районе при реализации заявленного в способе варианта работы антенны ПО в режиме излучения.
Задача, решаемая предлагаемым способом, - увеличение дальности действия и повышение точности способа позиционирования, а также расширение функциональности и надежности способа, что обеспечивается использованием в качестве излучаемого сигнала сложных сигналов низкочастотного диапазона, размещением гидроакустических излучателей вблизи побережья, а также работой акустического тракта ПО только в режиме приема.
Поставленная задача решается способом позиционирования как минимум одного подводного объекта (ПО), снабженного акустическим приемником и бортовым устройством вычисления координат, заключающимся в установке в морской среде как минимум двух стационарных гидроакустических маяков (ГМ), синхронизированных системой единого времени между собой и с акустическим приемником, излучении маяками гидроакустического сигнала, его приеме акустическим приемником подводного объекта и последующем вычислении координат ПО с использованием известных координат ГМ и рассчитанных дистанций между ГМ и ПО на основе известных данных о скорости звука в среде и задержки во времени прихода полезных сигналов, при этом гидроакустические маяки устанавливают за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого гидроакустического сигнала, так, чтобы вероятные позиции ПО в районе работ и позиции двух маяков не находились на одной линии, вводят координаты маяков и электронных копий излучаемых ими сигналов в память бортового устройства вычисления координат ПО, в качестве гидроакустического сигнала используют низкочастотные сложные сигналы с центральной частотой ниже 10 кГц, а вычисление координат ПО включает выделение бортовым устройством полезного сигнала гидроакустических маяков посредством их взаимно корреляционной обработки с электронной копией излученного сигнала в реальном времени, при этом для дистанций, меньших 20 км, и условий мелкого моря выбирают первый по времени приход полезного сигнала, а для дистанций, больших 20 км, и глубокого моря - последний приход.
Ввиду того, что гидрологические условия, и с ними скорость звука в воде, могут существенно изменяться в течение времени выполнения работ ПО, влияя на результат измерения дистанций между ГМ и ПО, точность позиционирования заявленным способом может быть повышена за счет контроля скорости звука на акватории в реальном времени.
Для этого на акватории в районе работ ПО дополнительно выставляют, как минимум, один радиогидроакустический буй с приемником спутниковой навигационной системы (GPS) и гидрофоном, погруженным на предполагаемую глубину работы ПО, дополнительно оборудуют пункт управления, включающий аппаратуру обработки сигналов ГМ, аналогичную установленной на ПО, а также каналы связи, как минимум, с одним гидроакустическим маяком для передачи через него команд управления на ПО и, как минимум, одним выставленным радиогидроакустическим буем, который передает по радиоканалу в пункт управления принятые от гидроакустических маяков акустические сигналы совместно со своими текущими GPS-координатами для вычисления скорости звука на трассах «гидроакустический маяк - буй»; по данным об изменении скорости звука в пункте управления формируют командный сигнал корректировки вычисляемых дистанций, передают его через канал связи на излучатель ГМ, при этом среди излучаемых ГМ сложных гидроакустических сигналов этот сигнал автоматически выделяется бортовой аппаратурой ПО, и затем устройством вычисления координат ПО выполняется корректировка позиционирования.
Известно, что скорость звука изменяется с глубиной, и это необходимо учитывать при корректировке вычисления координат. Измерения скорости звука на шельфе говорят о предпочтительности размещения излучателей у дна, где формируется придонный слой холодной воды, канализирующий акустическую энергию придонного источника звука, которая распространяется в этом слое с наиболее низкой скоростью по кратчайшему пути к точке приема (акустический приемник ПО). В переходной области от шельфа к глубокому морю акустическая энергия попадает в подводный звуковой канал, где скорость звука минимальна, так же распространяясь в нем по кратчайшему пути. Эти особенности распространения акустической энергии учитываются в заявляемом способе, где предлагается для дистанций, меньших 20 км, и условий мелкого моря выбирать первый по времени приход полезного сигнала, а для дистанций, больших 20 км, и глубокого моря - последний из приходов. Таким образом, для позиционирования ПО вне пределов шельфа желательно вести прием сигналов ГМ в подводном звуковом канале.
С увеличением дальности хода ПО появляется необходимость пропорционального увеличения дальности действия способа позиционирования, что требует снижения рабочих частот излучаемых ГМ сигналов, ввиду их меньшего затухания в среде, и/или увеличения мощности излучения. Это неизбежно ведет к увеличению массогабаритных характеристик гидроакустических излучателей и потребляемой электрической мощности, что для ГМ может быть вполне допустимым, а для бортовых устройств ПО является неприемлемым. Однако увеличение массы и габаритов ГМ снижает эксплуатационные характеристики способа позиционирования, кроме того, увеличение мощности сигнала при небольших глубинах постановки ГМ приведет к возникновению кавитации на излучателях, что является неприемлемым для функционирования используемой системы. Заявляемый способ позволяет ограничить в допустимых пределах мощность излучения за счет использования низкочастотных сложных сигналов с характерной для их структуры увеличенной длительностью импульса и выигрыша в отношении сигнал/помеха, получаемом при обработке сигнала. Отметим, что возможность ограничения мощности позволяет использовать гидроакустические излучатели уменьшенных массогабаритных параметров, что дополнительно улучшает функциональность способа.
Таким образом, в заявляемом способе одновременно решается задача увеличения дальности и функциональности способа позиционирования.
Увеличение длительности акустического импульса сопровождается интерференцией прямого и отраженных сигналов в точке приема, влекущей снижение помехоустойчивости бортовой навигационной системы.
Для выделения полезного сигнала, пришедшего от излучателя в точку приема по кратчайшему расстоянию, и ослабления влияния переотраженных сигналов на процесс измерения дистанции, а также для увеличения дальности обнаружения ГМ подводным объектом, в заявляемом способе используют низкочастотные сложные сигналы и взаимно корреляционную обработку излученного и принятого полезных сигналов. Результатом корреляционной обработки является импульсная характеристика канала распространения сигнала, которая представляет собой амплитудно-временную зависимость, отражающую последовательность прихода в точку приема прошедшей по различным траекториям в среде энергии излученного маяком акустического сигнала. Структура импульсной характеристики и времена приходов используются затем при расчете дистанций между излучателем и приемником по известным методикам, например, Безответных В.В., Буренин А.В., Моргунов Ю.Н., Половинка Ю.А. Экспериментальные исследования особенностей распространения импульсных сигналов из шельфа в глубокое море // Акуст. журн. 2009. Т.55. №3. С.371-380.
Поскольку скорость ПО в режиме позиционирования не превышает 1 м/с, использование сложных сигналов и корреляционная обработка для вычисления дистанций оказываются вполне приемлемыми в решении задач навигации ПО.
Применение сложных (шумоподобных) сигналов в системе позиционирования обусловлено их свойствами, в частности хорошими автокорреляционными свойствами, благодаря которым при излучении достаточно длинного импульса в процессе обработки принятый акустический сигнал может быть «свернут» в короткий импульс, обеспечивающий высокое временное разрешение и отношение сигнал/шум в приемном тракте, возможность на этой основе эффективной борьбы с многолучевым характером распространения сигналов в условиях шельфа, возможность идентификации одновременно работающих излучателей при одном и том же типе сигнала. Одним из эффективных способов получения сложных сигналов является модуляция несущей частоты излучения последовательностью максимальной длины (М-последовательнось). Предпочтительной является фазовая манипуляция, поскольку при этом мощность системы излучения постоянна и источники электропитания используются достаточно эффективно. Этот вид модуляции можно легко реализовать на основе цифровой схемотехники.
Помимо фазоманипулированных в качестве сложных сигналов также возможно использование частотно-модулированных сигналов.
Выставление ГМ вблизи побережья за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого акустического сигнала в воде, обеспечивает, с учетом резонансных размеров излучателя, его условия работы как «точечного», что на практике упрощает реализацию системы позиционирования.
Способ осуществляют следующим образом.
К аппаратуре ГМ и ПО подключают предварительно синхронизированные блоки единого времени, которые вырабатывают импульсы запуска срабатывания ГМ и начала регистрации сигналов приемным трактом ПО. Не менее двух ГМ выставляют вблизи побережья за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого акустического сигнала.
Расстояние между соседними ГМ выбирают так, чтобы оно было соизмеримо с максимальным удалением ПО от ГМ и чтобы при этом вероятные позиции ПО в районе работ и позиции двух маяков не находились на одной прямой. Любым приемлемым способом определяют координаты точек постановки ГМ и вводят их в память бортового устройства вычисления координат ПО. Одновременно в память бортового устройства вычисления координат ПО вводят электронные копии излучаемых маяками сигналов и данные о величине скорости звука в среде и возможном ее изменении в течение суток в районе работ. Эти данные могут быть справочными или получены в результате специальных предварительных измерений или получаемыми в реальном времени. Маяки работают автономно, излучая в виде акустических радиоимпульсов сложные сигналы с заданной периодичностью по установленной программе. В целях повышения дальности действия способа и разрешающей способности по дистанции предпочтительными являются низкочастотные фазоманипулированные, например, на основе М-последовательностей сигналы или частотно-модулированные сигналы с центральной частотой ниже 10 кГц. Сигналы ГМ воспринимает акустический приемник, расположенный на ПО, где в бортовом устройстве вычисления координат выполняется взаимно корреляционная обработка принятых и содержащихся в памяти устройства электронных копий излучаемых маяками сигналов с получением импульсной характеристики канала распространения сигнала, выделяются интервалы времени между моментами излучения и приема сигнала, на основе которых с учетом известной скорости звука вычисляют дистанции между ГМ и ПО и относительные и абсолютные координаты ПО.
Способ позволяет осуществлять одновременное позиционирование одного или нескольких ПО на больших дистанциях, в любых метеоусловиях, обеспечивая акустическую незаметность ПО.
Предлагаемое размещения ГМ вблизи побережья значительно упрощает осуществление способа за счет возможности постановки, снятия и обслуживания ГМ с помощью маломерных плавсредств, возможности уточнения координат постановки ГМ с помощью эхолотов и спутниковой системы навигации, доступности ГМ на малых глубинах для ремонта и обслуживания, позволяет использовать в способе излучатели ГМ сниженных массогабаритных характеристик, а также снижает риск повреждения или подъема ГМ рыбопромысловыми судами.
Возможность реализации заявляемого способа позиционирования экспериментально проверена в бухте Витязь залива Посьета Японского моря. Вблизи береговой черты на удалениях 150 и 200 м от берега, на глубине 10 м были установлены два ГМ, которые ежеминутно с интервалом 20 с излучали сложные сигналы в виде М-последовательностей с центральной частотой 2500 Гц, длиной 255 символов, 4 периода на символ. Координаты ГМ при установке определялись по приемнику GPS на плавсредстве. Вместо ПО использовали имитатор на основе радиогидроакустического буя и берегового комплекта аппаратуры.
Радиогидроакустический буй включал акустический приемник, погружаемый в придонную область, и контейнер на поверхности, где находились усилитель сигналов акустического приемника, приемник GPS и радиопередатчик. Радиосигнал буя содержал информацию о сигналах ГМ, принятых акустическим приемником, и информацию о GPS-координатах буя. GPS-координаты передавались по радиоканалу с частотой 1 Гц, что позволяло отслеживать дрейф буя с точностью до 5 м. В состав приемника GPS входила GPS-антенна АТ-45 и GPS-модуль ЕТ-112.
Буй находился в дрейфе или буксировкой перемещался на удалении около 1 км от берега, не находясь на одной линии с двумя ГМ.
На берегу размещался комплект аппаратуры, включающий приемник радиосигнала, а также аппаратура и персональный компьютер, выполняющие взаимно корреляционную обработку принятых сигналов с их электронной копией для выделения приходов полезного сигнала и вычисления дистанций от буя до ГМ по заданной скорости звука, для этого работа гидроакустических маяков и аппаратуры на берегу были синхронизированы системой единого времени. По известным координатам ГМ и вычисленным дистанциям производился расчет текущих координат буя.
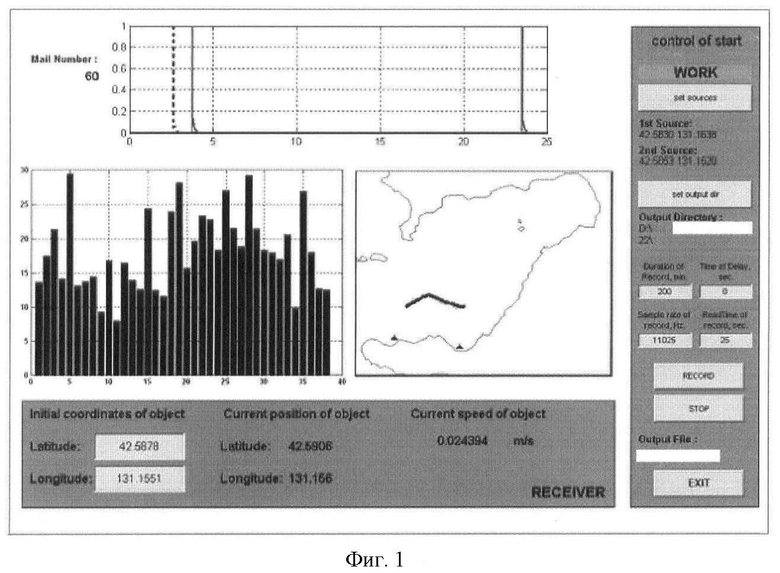
На персональном компьютере реализован графический пользовательский интерфейс, позволяющий в режиме реального времени обрабатывать и отображать на дисплее информацию о перемещении имитатора ПО на географической карте акватории (фиг.1).
На фиг.1 приведено отображение работы способа позиционирования на мониторе персонального компьютера из состава берегового комплекта аппаратуры.
Верхнее окно - структура взаимно корреляционной функции, отражающая импульсную характеристику гидроакустического канала (сплошные линии) и метку времени системы синхронизации (штриховая линия).
Среднее правое окно отображает карту района (в данном эксперименте береговую линию бухты Витязь), местоположение ГМ у береговой линии (треугольники) и траекторию перемещения буя, полученную по данным вычисления дистанций между ГМ и буем (сплошная кривая).
Среднее левое окно отображает мгновенную текущую ошибку определения координат буя в метрах.
Все получаемые во время эксперимента данные (географические координаты ГМ, GPS-координаты имитатора ПО, метки системы единого времени, поток данных от коррелятора) сохраняются в цифровом виде на жестком диске персонального компьютера.
Таким образом, используемый имитатор ПО позволил осуществить заявляемый способ позиционирования:
- в части позиционирования ПО (имитатора ПО) - определение координат буя выполнялось на основе измерения дистанций между ГМ и буем по акустическим сигналам, без информации приемника GPS-координат буя,
- в части увеличения точности позиционирования на основе знания информации об изменении скорости звука на акватории в реальном времени - полученные по радиоканалу GPS-координаты надводной части буя использовались для определения дистанций до ГМ, что позволяет рассчитать скорости звука на трассах «ГМ - буй» по задержкам во времени моментов прихода сигналов ГМ на акустический приемник буя, и после сопоставления с результатами, полученными на основе определения дистанций между ГМ и буем по акустическим сигналам, рассчитать ошибку определения координат. Полученные с использованием информации о GPS-координатах буя скорости звука на трассах «ГМ - буй» далее возможно использовать для коррекции расчетов дистанций по акустическим сигналам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| Способ позиционирования подводного объекта на больших дистанциях | 2022 |
|
RU2794700C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| Способ определения координат подводного объекта в переходной зоне шельф - глубокое море | 2021 |
|
RU2752018C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ позиционирования подводных объектов | 2018 |
|
RU2702700C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
Использование: изобретение относится к способам навигации подводных объектов и может быть использовано для одновременного определения местонахождения нескольких подводных автономных объектов (ПО) по гидроакустическим маякам. Сущность: способ включает размещение вблизи побережья на глубине, превышающей в 5-10 раз длину волны излучаемого гидроакустического сигнала, акустических маяков, работающих в низкочастотном диапазоне и излучающих сложные, преимущественно фазоманипулированные или частотно-модулированные сигналы с центральной частотой ниже 10 кГц. Координаты маяков и электронные копии излучаемых ими сигналов вводят в бортовую систему вычисления координат ПО. Вычисление координат ПО включает выделение бортовым устройством полезного сигнала акустических маяков посредством взаимно корреляционной обработки принятого сигнала с электронной копией излученного сигнала в реальном времени, при этом для дистанций, меньших 20 км, и условий мелкого моря выбирают первый по времени приход полезного сигнала, а для дистанций, больших 20 км, и глубокого моря - последний приход. Технический результат: увеличение дальности действия и повышение точности способа позиционирования, а также расширение функциональности и надежности способа. 1 з.п. ф-лы, 1 ил.
1. Способ позиционирования как минимум одного подводного объекта (ПО), снабженного акустическим приемником и бортовым устройством вычисления координат, включающим установку в морской среде как минимум двух стационарных гидроакустических маяков (ГМ), синхронизированных системой единого времени между собой и с акустическим приемником, излучение маяками гидроакустического сигнала, его приема акустическим приемником подводного объекта и последующее вычисление координат ПО с использованием известных координат ГМ и рассчитанных дистанций между ГМ и ПО по известной скорости звука в среде и задержки во времени прихода полезных сигналов, отличающийся тем, что гидроакустические маяки устанавливают за пределами прибойной зоны на глубинах, превышающих в 5-10 раз длину волны излучаемого гидроакустического сигнала так, чтобы вероятные позиции ПО в районе работ и двух гидроакустических маяков не находились на одной линии, вводят координаты маяков и электронных копий излучаемых ими сигналов в память бортового устройства вычисления координат ПО, в качестве гидроакустического сигнала используют сложные низкочастотные сигналы с центральной частотой ниже 10 кГц, а вычисление координат ПО включает выделение бортовым устройством полезного сигнала гидроакустических маяков посредством их взаимно корреляционной обработки в реальном времени с электронной копией излученного сигнала, при этом для дистанций меньших 20 км и условий мелкого моря выбирают первый по времени приход полезного сигнала, а для дистанций больших 20 км и глубокого моря - последний приход.
2. Способ по п.1, отличающийся тем, что скорость звука в среде определяют путем выставления в районе работ ПО, как минимум, одного радиогидроакустического буя с приемником спутниковой навигационной системы (GPS) и гидрофоном, погруженным на предполагаемую глубину работы ПО, дополнительно оборудуют пункт управления, включающий каналы связи, как минимум, с одним гидроакустическим маяком, передающим команды управления на ПО и, как минимум, одним выставленным радиогидроакустическим буем, передающим по радиоканалу в пункт управления принятые от гидроакустических маяков акустические сигналы совместно со своими текущими GPS-координатами, в пункте управления определяют скорость звука на трассах «гидроакустический маяк - буй», формируют командный сигнал корректировки вычисляемых дистанций по полученным данным об изменении скорости звука, передают его через канал связи на излучатель ГМ, при этом среди излучаемых ГМ сложных гидроакустических сигналов этот сигнал автоматически выделяется бортовой аппаратурой ПО и выполняется корректировка позиционирования.
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| WO 2007022233 А2, 22.02.2007 | |||
| US 2011141853 A1, 16.06.2011 | |||
| ШТАММ БАКТЕРИЙ Bacillus licheniformis, ИСПОЛЬЗУЕМЫЙ ДЛЯ ПОЛУЧЕНИЯ ПРОБИОТИЧЕСКОЙ КОРМОВОЙ ДОБАВКИ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ПРОИЗВОДСТВА ВЫСОКОКАЧЕСТВЕННЫХ КОРМОВ, ПОВЫШАЮЩИХ ПРОДУКТИВНОСТЬ И СНИЖАЮЩИХ РИСК ЖЕЛУДОЧНО-КИШЕЧНЫХ ЗАБОЛЕВАНИЙ ЖИВОТНЫХ, ПТИЦЫ И РЫБ | 2008 |
|
RU2398872C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ НАВИГАЦИОННОЙ ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ ПОДВОДНЫМИ АППАРАТАМИ С ОПРЕДЕЛЕНИЕМ МЕСТА ПО РАЗНОСТЯМ РАССТОЯНИЙ ДО ВЕДУЩЕГО ПОДВОДНОГО АППАРАТА И МАЯКОВ-ОТВЕТЧИКОВ | 2005 |
|
RU2285273C1 |

