Изобретение относится к области подводной навигации и обеспечивает позиционирование (географическую привязку) подводных объектов с определением их обсервованных (точно рассчитанных) географических координат с помощью гидролокатора и глобальной навигационной системы связи (ГЛОНАСС или GPS).
Известны способы, обеспечивающие позиционирование подводных объектов с помощью гидролокатора. Среди них: способ по патенту RU №2032187, МПК G01S 15/08, опубл. 27.03.1995, заключающийся в том, что на дне водоема размещается некоторое количество гидроакустических маяков-ответчиков с различными частотами ответа, создающих навигационную базу, и их калибровку в относительных и географических координатах с помощью судна обеспечения. Для этого судно обеспечения оснащается бортовыми комплексами спутниковой и гидроакустической навигации. Гидроакустический передатчик, располагаемый на объекте навигации, осуществляет излучение гидроакустических сигналов с последующим измерением временных интервалов их распространения от объекта навигации до донных маяков-ответчиков и обратно, и преобразования этих интервалов в дистанции между объектом навигации и размещенными на дне маяками-ответчиками донной навигационной базы. В результате обработки полученных значений дальности от объекта навигации (подводного объекта) до донных маяков-ответчиков получают достоверные результаты навигации, обеспечивающие его позиционирование.
Недостатками аналога являются:
- значительные затраты судового времени, что сказывается на низкой оперативности метода;
- большое количество донных маяков-ответчиков (12…16 шт.) с длительным сроком автономности и необходимостью их технического обслуживания;
- необходимость проведения калибровочных работ, причем не только при постановке и снятии донных маяков-ответчиков, но и в период их эксплуатации при изменении внешних условий, среди которых могут выступать гидрологические и сейсмические факторы;
- необходимость замены донных маяков-ответчиков после выработки своего энергетического ресурса с обязательным последующим проведением калибровочных работ вновь установленного донного оборудования;
- сложность бортовой аппаратуры объекта навигации, которая сказывается на ее стоимости.
Известен способ определения географических координат подводного объекта по патенту US №5579285. МПК G01S 5/00, G01S 5/14, G01S 11/14, опубл. 21.08.1995. Способ реализован на базе устройства, в состав которого входят дрейфующие GIB-буи (Gtobal Intelligent Buoy), образующие длинную базу, составляющую километры, и подводный аппарат с маяком - гидроакустическим передатчиком, излучающим сигналы определенной частоты в предустановленные моменты времени. Каждый буй снабжен гидроакустическим приемником (гидрофоном), приемником глобальной системы позиционирования GPS, часами, синхронизированными с часами GPS, радиомодемом. Буи измеряют собственные географические координаты с помощью GPS. В фиксированные моменты времени маяк излучает гидроакустический сигнал, который через определенное время запаздывания, определяемое расстоянием, фиксируется каждым буем. Одновременно, в строгой синхронизации по времени, полученным значениям времен запаздывания приписываются текущие географические координаты буев на момент начала излучения сигнала маяком подводного аппарата. Все полученные данные по радиоканалу через радиомодем передаются на пост слежения, расположенный либо на корабле сопровождения, либо на берегу. На этом посту с учетом полученных данных с помощью специального программного обеспечения вычисляются географические координаты подводного аппарата.
Недостатками аналога являются:
- возможность сноса буев за счет дрейфа из района контроля на расстояния, превышающие дальность гидроакустической связи;
- из-за многолучевости распространения гидроакустических посылок возможность неоднократного прихода на любой из буев одного и того же сигнала, излученного маяком подводного аппарата, что отчетливо проявляется на больших дальностях между подводным аппаратом и буями или на мелководье;
- поскольку разность времени прихода гидроакустического сигнала на любой из буев определяется по переднему фронту приходящего от гидроакустического передатчика сигнала, то при малом отношении «сигнал/помеха» с учетом значительного расстояния между буем и подводным аппаратом существует неоднозначность определения времени запаздывания из-за возможного поражения сигнала помехой.
Наиболее близким к заявленному техническому решению является способ по патенту RU №2365939, МПК G01S 15/08, опубл. 27.08.2009. Для реализации указанного способа используют дрейфующую на водной поверхности станцию, оснащенную аппаратурой для непрерывного приема сигналов спутниковых навигационных систем (GPS или ГЛОНАСС). Прием и обработка этих сигналов обеспечивает определение собственных координат дрейфующей станции с высокой точностью в любой момент времени. По сигналу запроса с подводного объекта или по определенной программе работы дрейфующей станции информация о ее географических координатах передается на подводный объект по гидроакустическому каналу в виде шумоподобного кодированного сигнала определенной формы.
Недостатками способа-прототипа является недостаточная точность определения географических координат подводного объекта, вызванная:
- погрешностью определения координат, связанной с изменчивостью скорости сигнала в морской воде. Эта погрешность существенно возрастает на мелководье, когда временные задержки между отдельными лучами уменьшаются, при этом сами лучи идентифицировать и выделить отдельно невозможно;
- возможностью искажения сигнала, передаваемого с дрейфующей станции на подводный объект, вследствие его поражения или ослабления при наличии таких факторов, как гидрология (отрицательная рефракция, слой скачка скорости звука) и реверберация.
Заявляемое изобретение решает проблему повышения точности определения географических координат подводного объекта, что в конечном итоге, позволяет более точно позиционировать объект в морских акваториях на рабочих глубинах.
Для решения указанной проблемы используется следующая совокупность существенных признаков: в способе определения географических координат подводного объекта при использовании гидролокатора, размещенного на надводном судне, основанном также как прототип, на приеме сигналов спутниковых навигационных систем GPS/ГЛОНАСС для определения собственных географических координат судна на выбранный момент времени, передаче по гидроакустическому каналу информации о собственных географических координатах судна на подводный объект, на котором осуществляется определение истинных географических координат(ϕист., λист.) подводного объекта с учетом его текущих географических координат, определяемых бортовой навигационной системой, в отличие от прототипа гидролокатором надводного судна на выбранный момент времени определяются три пространственные координаты подводного объекта: пеленг (П), дальность (Д) и угол места (УМ), значения которых подаются на бортовой компьютер надводного судна для расчета истинных географических координат подводного объекта с последующей передачей полученных значений, приведенных к выбранному моменту времени, по информационному кабелю в навигационную систему подводного объекта.
Сущность изобретения заключается в предварительном расчете обсервованных географических координат (ϕ0, λ0) подводного объекта на борту надводного судна на выбранный момент времени и их передаче, приведенных к этому времени, в навигационную систему подводного объекта, что достигается с помощью: гидролокатора, размещенного на надводном судне и определяющего три пространственные координаты подводного объекта: пеленг (П), дистанцию (Д), угол места (УМ); навигационного GPS/ГЛОНАСС - приемника, размещенного на надводном судне и принимающего данные с искусственного спутника Земли о его истинных географических координатах (ϕист., λист.); кабеля связи, обеспечивающего информационный канал передачи данных подводному объекту с надводного судна и обратно. В качестве указанных данных выступают искомые обсервованные (точно рассчитанные) географические координаты подводного объекта (ϕ0, λ0), которые рассчитываются на надводном судне по определенным алгоритмам с учетом пространственных координат подводного объекта (П, Д, УМ) и истинных географических координат надводного судна (ϕист., λист.).
Предлагаемый способ реализуется следующим образом.
С помощью гидролокатора, размещенного в килевой части надводного судна, определяются три пространственные координаты подводного объекта: пеленг (П); дистанция (Д); угол места (УМ). Это осуществляется в результате обработки отраженного от подводного объекта зондирующего гидроакустического сигнала, представляющего собой импульсы определенной амплитуды, длительности, скважности и частоты заполнения, которые излучаются гидролокатором надводного судна в сторону подводного объекта и после отражения от него принимаются и фиксируются двумя сканирующими в пространстве диаграммами направленности, формируемыми гидроакустической антенной указанного гидролокатора в режиме приема. Истинные географические координаты надводного судна (ϕист., λист.) определяются по сигналам, поступающим от искусственного спутника Земли навигационной системы GPS/ГЛОНАСС, которые принимаются его навигационным приемником. С учетом этих координат и полученных пространственных координат (П, Д, УМ) подводного объекта осуществляется точный расчет координат подводного объекта на надводном судне, выполняемый по определенным алгоритмам, после чего рассчитанные географические координаты (ϕ0, λ0) подводного объекта передаются в его навигационную систему по информационному кабелю с надводного судна.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача - повышение точности определения географических координат подводного объекта, решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию «новизна».
В свою очередь, проведенный информационный поиск в области подводной навигации не выявил решений, содержащих отдельные отличительные признаки заявляемого изобретения, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
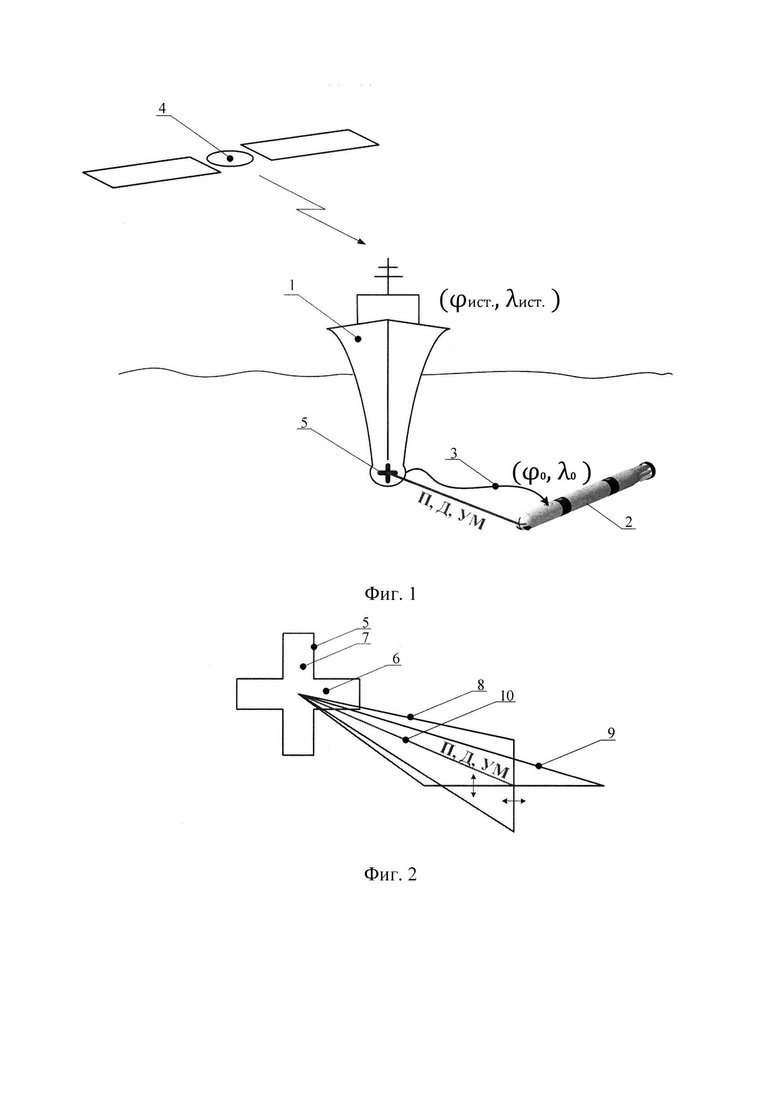
Сущность способа поясняется графическими материалами, где на фиг. 1 представлена схема определения обсервованных географических координат (ϕ0, λ0) подводного объекта;
на фиг. 2 - представлена схема определения пространственных координат (П, Д, УМ) подводного объекта гидролокатором;
на фиг. 3 - представлена структурная схема электронного устройства надводного судна, реализующая способ;
на фиг. 4 - представлен алгоритм вычисления горизонтальной дальности Дгор. между надводным судном и подводным объектом при их условном нахождении на одном горизонте;
на фиг. 5 - представлено условное расположение на одном горизонте судна обеспечения и подводного объекта после расчета горизонтальной дальности (Дгор.).
На рисунках (фиг. 1-5) обозначены: 1 надводное судно; 2 подводный объект; 3 информационный кабель; связывающий надводное судно обеспечения с подводным объектом; 4 искусственный спутник Земли, реализующий глобальную навигационную систему связи (GPS/ГЛОНАСС); 5 гидроакустическая антенна, обеспечивающая работу гидролокатора; 6 горизонтальная антенная решетка; 7 вертикальная антенная решетка; 8 диаграмма направленности, сформированная горизонтальной антенной решеткой (ГАР) 6 гидроакустической антенны 5 гидролокатора и сканирующей в горизонтальной плоскости; 9 диаграмма направленности, сформированная вертикальной антенной решеткой (ВАР) 7 гидроакустической антенны 5 гидролокатора и сканирующей в вертикальной плоскости; 10 узконаправленная («игольчатая») диаграмма направленности, которая является результатом корреляции диаграмм направленности, формируемых ГАР и ВАР; 11 бесплатформенная инерциальная навигационная система (БИНС), 12 гидролокатор (ГЛ), 13 бортовой компьютер надводного судна (БК) надводного судна; 14 условная точка пересечения двух соответствующих виртуальных прямых, а именно: горизонтальной, проведенной, из реального места расположения подводного объекта и вертикальной, проведенной из места нахождения надводного судна; 15 Дгор (горизонтальная дальность) расстояние между надводным судном обеспечения и подводным объектом при их условном нахождении на одном горизонте.
Истинные географические координаты (ϕист., λист.) надводного судна обеспечения 1 определяются по сигналам, поступающим от искусственного спутника Земли 4, которые принимаются его навигационным GPS/ГЛОНАСС - приемником. Гидролокатор 12 определяет три пространственные координаты подводного объекта 2: пеленг (П); дистанцию (Д); угол места (УМ).
Пеленг (П) показывает пространственное направление с надводного судна 1 на подводный объект 2, а с учетом полученных гидролокатором значений дистанции (Д) и угла места (УМ) до подводного объекта 2 вычисляется по определенным алгоритмам горизонтальное расстояние Дгор. между надводным судном 1 и подводным объектом 2 при их условном нахождении на одном горизонте. Это вычисление осуществляется бортовым компьютером 13. Обсервованные географические координаты (ϕ0, λ0) подводного объекта определяются при отложении на линии пеленга (П) рассчитанного значения Дгор., проведенного на навигационной карте от надводного судна 1 в сторону подводного объекта 2. При передаче значения обсервованных географических координат (ϕ0, λ0) по информационному кабелю 3 в навигационную систему подводного объекта 2, осуществляется определение его географических координат на любой рабочей глубине.
На фиг. 2 для пояснения способа представлен общий принцип определения пространственных координат подводного объекта 2, реализуемый гидроакустической антенной 5 гидролокатора 12. Гидроакустическая антенна 5 гидролокатора 12 надводного судна 1 в составе горизонтальной 6 и вертикальной 7 антенных решеток формирует две сканирующие в водной среде диаграммы направленности, а именно: диаграмму направленности 8, сформированную горизонтальной антенной решеткой 6, которая сканирует в горизонтальной плоскости, и диаграмму направленности 9, сформированную вертикальной антенной решеткой 7, сканирующей в вертикальной плоскости. Сформированная узконаправленная диаграмма направленности 10 («игольчатая») гидролокатора 12 надводного судна 1, способна сканировать в пространстве по курсовому углу (КУ) и углу места (УМ), что является результатом корреляции диаграмм направленности 8 и 9.
На фиг. 3 представлена структурная схема электронного устройства надводного судна 1, реализующая предлагаемый способ. На один из приборов устройства - бесплатформенную инерциальную навигационную систему 11, с искусственного спутника Земли 4 глобального позиционирования передаются истинные координаты надводного судна 1 (ϕист., λист.), откуда они поступают на его бортовой компьютер 13. Пространственные координаты (П, Д, УМ) подводного объекта 2, в роли которого может выступать телеуправляемый необитаемый подводный аппарат (ТНПА), определяемые гидролокатором 12, также передаются на бортовой компьютер 13, где по определенным алгоритмам осуществляется вычисление горизонтального расстояния Дгор. между надводным судном 1 и подводным объектом 2 при их условном нахождении на одном горизонте. С учетом полученного значения Дгор. в бортовом компьютере 13 надводного судна 1 по соответствующей программе корректируются точные координаты подводного объекта 2, значения которых (ϕ0, λ0) передаются в его навигационную систему по информационному кабелю 3.
На фиг. 4 приведен алгоритм вычисления горизонтальной дальности между надводным судном 1 и подводным объектом 2 при их условном нахождении на одном горизонте. С учетом определения гидролокатором 12 наклонной дальности (Д) между надводным судном 1 и подводным объектом 2, а также значения угла места (УМ) подводного объекта 2 относительно надводного судна 1, в бортовом компьютере 13 (фиг. 3) рассчитывается горизонтальная дальность Дгор. между ними по формуле:
Дгор.=Д×Sin(УМ)
На фиг. 5 представлено условное расположение на одном горизонте судна обеспечения и подводного объекта после расчета горизонтальной дальности Дгор., объясняющее порядок корректировки точных координат (ϕ0, λ0) подводного объекта 2. Корректировка, осуществляемая на бортовом компьютере 13, обеспечивает динамичное обновление точных координат в реальном масштабе времени.
Заявляемый способ позволяет повысить точность определения географических координат подводного объекта, что в конечном итоге обеспечивает точное позиционирование подводного объекта в морских акваториях на рабочих глубинах с определением их обсервованных географических координат (ϕ0, λ0). Полученные координаты (ϕ0, λ0) с надводного судна 1 подаются в навигационную систему подводного объекта 2 по информационному кабелю 3, что позволяет определить в реальном масштабе времени истинные географические координаты подводных технических сооружений (трубопроводов, гидротехнических сооружений и др.), обнаруженных или инспектируемых подводными поисковыми аппаратами.
Предлагаемое изобретение было создано в составе научно-исследовательских работ, проводимых на кафедре «Радиосвязь на морском флоте» ФБГОУ ВО «Государственного университета морского и речного флота имени адмирала С.О. Макарова». Были произведены расчеты, показавшие возможность использования заявляемого способа в труднодоступных районах, например, при проведении геологоразведочных работ в районе Арктического шельфа, мониторинге подводных технических сооружений на больших глубинах, проведении поисковых аварийно-спасательных работ на рабочих глубинах, и т.д., что с учетом выше изложенного позволяет сделать вывод о возможности его промышленного применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529207C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |


Изобретение относится к области подводной навигации и обеспечивает позиционирование (географическую привязку) подводных объектов с определением их обсервованных (точно рассчитанных) географических координат с помощью гидролокатора и глобальной навигационной системы связи (GPS или ГЛОНАСС). Сущность изобретения заключается в том, что в способе определения географических координат подводного объекта при использовании гидролокатора, размещенного на надводном судне, основанном, как и прототип, на приеме сигналов спутниковых навигационных систем GPS/ГЛОНАСС для определения собственных географических координат судна на выбранный момент времени, передаче по гидроакустическому каналу информации о собственных географических координатах судна на подводный объект, на котором с учетом его текущих географических координат, определяемых бортовой навигационной системой, осуществляется определение истинных географических координат (ϕист., λист.) подводного объекта, в отличие от прототипа гидролокатором надводного судна на выбранный момент времени определяются три пространственные координаты подводного объекта - пеленг (П), дальность (Д) и угол места (УМ), значения которых подаются на бортовой компьютер надводного судна для расчета истинных географических координат подводного объекта с последующей передачей полученных значений, приведенных к выбранному моменту времени, по информационному кабелю в навигационную систему подводного объекта. 5 ил.
Способ определения географических координат подводного объекта при использовании гидролокатора, размещенного на надводном судне, основанный на приеме сигналов спутниковых навигационных систем GPS/ГЛОНАСС для определения собственных географических координат судна на выбранный момент времени, передаче по гидроакустическому каналу информации о собственных географических координатах судна на подводный объект, на котором с учетом его текущих географических координат, определяемых бортовой навигационной системой, осуществляется определение истинных географических координат (ϕист., λист.) подводного объекта, отличающийся тем, что гидролокатором надводного судна на выбранный момент времени определяются три пространственные координаты подводного объекта: пеленг (П), дальность (Д) и угол места (УМ), значения которых подаются на бортовой компьютер надводного судна для расчета истинных географических координат подводного объекта с последующей передачей полученных значений, приведенных к выбранному моменту времени, по информационному кабелю в навигационную систему подводного объекта.
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ГРУППЫ ПОДВОДНЫХ ОБЪЕКТОВ В ОГРАНИЧЕННОМ ВОДНОМ ОБЪЕМЕ | 2016 |
|
RU2626244C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| US 4914598 A1, 03.04.1990. | |||

