Заявленная группа изобретений относится к радиотехнике и может быть использована в многопозиционных радиотехнических системах для определения координат (ОК) заданных источников радиоизлучения (ИРИ) с кодовым или временным разделением каналов.
Известен способ измерения взаимной задержки MSK сигналов пакетных радиосетей в разностно-дальномерной системе местоопределения (см. Пат. РФ №2623094, МПК G01S 5/06, опубл. 22.06.2017, бюл. №18). Способ предполагает прием периферийными пунктами приема (ППП) разностно-дальномерной системы местоопределения (РДСМО) сигналов пакетных радиосетей, измерение времени прихода сигналов относительно единой шкалы времени, передачу по линии связи измеренных значений на центральный пункт приема и обработки (ЦППО), где вычисляют взаимные задержки сигналов τi,k, причем модуль взаимно корреляционной функции (ВКФ) z(τ) вычисляют с помощью парциальных ВКФ, чем достигается повышение точности измерения τi,k.
Однако аналогу присущ недостаток, ограничивающий его применение. Последний со сложностью реализации ППП. Способ предусматривает использование на всех ППП системы единого времени и измерителя задержки сигналов. Кроме того, отсутствие привязки измеренных значений задержки сигнала на ППП к заданному источнику радиоизлучения при оценке их координат в условиях, когда работа нескольких ИРИ осуществляется на одной частоте (ИРИ с временным или кодовым разделением) приводит к ошибкам оценки координат ИРИ.
Известны Пат. РФ №№2258242, 2309420, 2521084 и др., эффективность применения которых резко падает при оценке координат ИРИ с временным или кодовым разделением каналов. В зависимости от длительности оценки задержек сигналов τi,k возникают ошибки ОК различной природы.
Наиболее близким по технической сущности к заявляемому является разностно-дальномерный способ определения координат источника радиоизлучения (см. Пат. №2539968, МПК G01S 3/46, опубл. 27.01.2015, бюл. №3).
Способ-прототип заключается в приеме сигналов ИРИ разнесенными в пространстве периферийными пунктами приема, связанными с ЦППО командными линиями связи и линиями аналоговой ретрансляции сигналов, причем по командным линиям связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разности времени приема сигналов в ППП и ЦППО τi,k, i и k - номера ЦППО и ППП соответственно, при этом задержки τi,k определяют как аргумент максимизации модуля взаимнокорреляционной функции, а на их основе вычисление координат ИРИ.
Прототип обеспечивает уменьшение количества вычислений при оценке временных задержек принимаемых на ППП сигналов ИРИ в реализуемой ЦППО процедуре. Кроме того, выполнение ППП максимально упрощено, что способствует широкому применению способа-прототипа в РДСМО. Каждый ППП представляет собой совокупность устройств, выделяющих радиосигналы ИРИ на фоне помех, а также устройств, организующих аналоговые линии ретрансляции.
Однако прототипу присущ недостаток, ограничивающий его применение. Ошибочное определение координат возникает в тех случаях, когда на частоте искомого ИРИ работают несколько корреспондентов (ИРИ) с временным или кодовым разделением каналов, например, сети Wi-Fi, GSM 2G, UMTS и др.
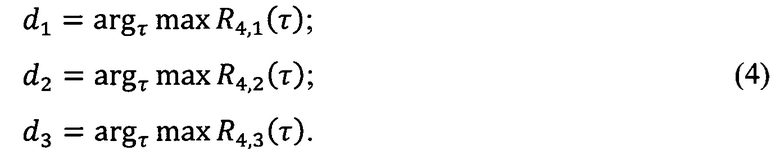
Проиллюстрируем возникающую при этом проблему на плоскости для двух ИРИ, разработанных на одной частоте с временным разделением. Положим, что ЦППО находится в точке А (см. фиг. 1), два ППП располагаются в точках В и С. Искомый ИРИ в точке D, а второй ИРИ, работающий на той же частоте, находится в точке Е. Сплошными линиями отображены возможные положения искомого ИРИ по каждой паре ППП. Для второго ИРИ эти линии показаны пунктиром.
Если временной интервал накопления сигнала в ЦППО окажется много больше, чем интервал передачи данных в используемом стандарте связи (при временном разделении), в накапливаемом сигнале будут присутствовать излучения обеих ИРИ. Это приведет к ошибкам вычисления ВКФ и как следствие - к погрешностям измерения задержек сигнала τi,k. Последнее приводит к ошибкам определения местоположения ИРИ. Если мощность сигнала второго ИРИ на входе приемных трактов ППП окажется выше мощности сигнала искомого ИРИ, в ЦППО будут определены с погрешностями координаты второго ИРИ. Следовательно, это приведет к ошибочному определению местоположения второго ИРИ вместо искомого. При возникновении ситуации, когда мощность сигнала второго ИРИ окажется выше на части ППП, то результаты определения координат непредсказуемы (см. фиг. 2).
Ошибки измерений координат возможны и в ситуации, когда временной интервал накопления сигнала сопоставим с временем передачи данных в используемом стандарте связи. Они возникают при несогласованности начала интервалов накопления сигнала и передачи данных. Координаты искомого ИРИ будут также неправильно определены и в ситуации с согласованными интервалами «накопление - передача», но при работе второго ИРИ.
Целью заявляемого технического решения является разработка разностно-дальномерного способа определения координат ИРИ, обеспечивающего определение местоположения заданного источника радиоизлучения в условиях работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов.
Поставленная цель достигается тем, что в известном разностно-дальномерном способе определения координат ИРИ, основанном на приеме сигналов пространственно разнесенными периферийными пунктами приема, связанных с центральным пунктом приема и обработки командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряется разность времени приема этих сигналов в ППП и ЦППО τi,k как аргументы максимизации модуля взаимнокорреляционной функции, где i, k∈0, 1, …, N - номера ЦППО и ППП соответственно, на основе которых выполняют определение координат ИРИ, на ЦППО одновременно запоминают на интервале времени Δt сигналы ИРИ, принятые в ЦППО и всех ППП, демодулируют принятые в ЦППО сигналы ИРИ, на основе анализа полученного битового массива данных осуществляют поиск и анализ преамбулы и заголовка PLCP текущего фрейма, определяют начало МАС-фрейма, его длительность Δtфj и адрес пользователя Aj, j=1, 2, …, J, сравнивают полученный адрес с заданным для поиска Aзад, при их совпадении на интервале времени от начала преамбулы PLCP до конца j-го МАС-фрейма измеряют разность времени приема ретранслированных сигналов τi,k в ЦППО и ППП, в противном случае после завершения текущего j-го МАС-фрейма анализируют преамбулу и заголовок очередного МАС-фрейма с целью поиска фрейма заданного пользователя.
Благодаря новой совокупности существенных признаков в заявляемом способе обеспечивается определение координат заданного ИРИ разностно-дальномерным способом в условиях работы нескольких ИРИ на одной частоте с временным или кодовым разделением каналов.
Известны устройства реализации разностно-дальномерного способа местоопределения ИРИ (см. Пат. РФ №2670142, 2363010, 2309420). Всем им присущ общий недостаток - эффективность (работоспособность) их применения падает при ОК ИРИ с кодовым или временным разделением каналов.
Наиболее близким по технической сущности является устройство (см. Пат. РФ №2521084, G01S 3/46, опубл. 27.06.2014, бюл. №18, фиг. 1), реализующее РДСМО. Устройство-прототип содержит k периферийных пунктов приема и центральный пункт приема и обработки, причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, k+1 трактов приема радиосигналов и центральный пост обработки (ЦПО), k+1 входов которого соединены с выходами соответствующих трактов приема радиосигналов, а выход является выходной шиной ЦППО, первая входная шина которого является входом управления радиопередатчика и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки трактов приема радиосигналов.
Устройство-прототип обеспечивает повышение точности измерения координат ИРИ разностно-дальномерным способом за счет исключения процедуры ретрансляции сигналов с наихудшим отношением сигнал/шум.
Однако устройству присущ недостаток, ограничивающий его применение. Эффективность использования устройства (его точностные характеристики по определению координат заданного ИРИ) резко падает в условиях, когда на частоте искомого излучателя работает несколько корреспондентов с временным или кодовым разделением каналов.
Целью заявляемого технического решения является разработка устройства определения координат ИРИ на основе разностно-дальномерного способа, обеспечивающего определение местоположения заданного источника радиоизлучения в условиях одновременной работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов.
Поставленная цель достигается тем, что в известном устройстве, содержащем k периферийных пунктов приема и центральный пункт приема и обработки, причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, k+1 трактов приема радиосигналов и центральный пост обработки из последовательно соединенных блока измерения задержки Δτi,k и блока вычисления координат, выход которого является выходом ЦПО и выходной шиной ЦППО, причем k+1 входы ЦПО соединены с выходами соответствующих трактов приема сигналов, первая входная шина которого является входом управления радиопередатчика и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки ƒн трактов приема радиосигналов, в центральный пост обработки введены k+1 аналогово-цифровых преобразователей, входы которых являются соответственно k+1-ми входами ЦПО, k+1 блоков памяти, группы информационных входов которых соединяют с выходами соответствующих аналого-цифровых преобразователей, группу из k+1 входов блока измерения задержки τi,k соединена с информационными выходами соответствующих k+1 блоков памяти, блок управления, предназначенный для задания длительности интервала анализа Δt и его начала t', и тракт анализа, предназначенный для определения начала очередного фрейма t*, его длительности Δtj, вида модуляции МАС-фрейма и его демодуляции, определения адреса текущего пользователя Aj, второй вход которого является вторым установочным входом ЦПО и третьей входной шиной ЦППО, предназначенной для задания адреса пользователя Aj, первый информационный вход тракта анализа соединен с выходом k+1-го аналого-цифрового преобразователя (АЦП), а выход объединен с первыми входами управления k+1 блоков памяти и вторым входом блока управления, первый вход которого является первым установочным входом ЦПО и второй входной шиной ЦППО, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти и третьим входом тракта анализа, четвертая входная шина ЦППО, предназначена для задания координат ППП и ЦППО {X, Y}k+1, соединена со вторым входом блока расчета координат ЦПО и является третьим установочным входом ЦПО, генератор тактовых импульсов, выход которого соединен с входами синхронизации k+1-го АЦП, блока управления, тракта анализа, блока измерения задержки Δτi,k и блока вычисления координат.
При этом тракт анализа содержит последовательно соединенные демодулятор DBPSK сигналов, блок поиска и анализа заголовка PLCP, предназначенный для определения начала фрейма t*, типа модуляции МАС-фрейма и его длительности Δtj, демодулятор DQPSK сигналов, блок анализа МАС-фрейма, предназначенный для определения адреса пользователя текущего фрейма Aj и его сравнения с заданным Азад, и блок задания интервала измерений Δtизм, предназначенный для задания временных границ начала фрейма t* и его конца t1, выход которого является выходом тракта анализа, а информационный вход соединен с третьим выходом блока поиска и анализа заголовка PLCP, второй выход которого соединен со вторым входом блока анализа МАС-фрейма, третий вход которого является вторым входом тракта анализа, а вход демодулятора DBPSK является первым входом тракта анализа, третий вход которого соединен со входом управления демодулятора DBPSK сигналов, а вход синхронизации тракта анализа объединен со входами синхронизации блока задания интервала измерения Δtизм, демодулятора DBPSK сигналов, блока поиска и анализа заголовка PLCP, демодулятора DQPSK сигналов и блок анализа МАС-фрейма.
Введение новых элементов и связей позволяет достигнуть цели изобретения - обеспечить определение координат заданного ИРИ в условиях работы на одной частоте нескольких источников радиоизлучения с временным или кодовым разделением каналов.
Заявляемый способ поясняется чертежами, на которых:
на фиг. 1 иллюстрируется задача местоопределения ИРИ на плоскости для двух ИРИ (искомый D и второй Е), ЦППО (А), двух ППП (В и С);
на фиг. 2 показаны возможные результаты определения местоположения заданного ИРИ при обобщенных условиях измерений (мощность сигнала второго ИРИ Е выше на части ППП);
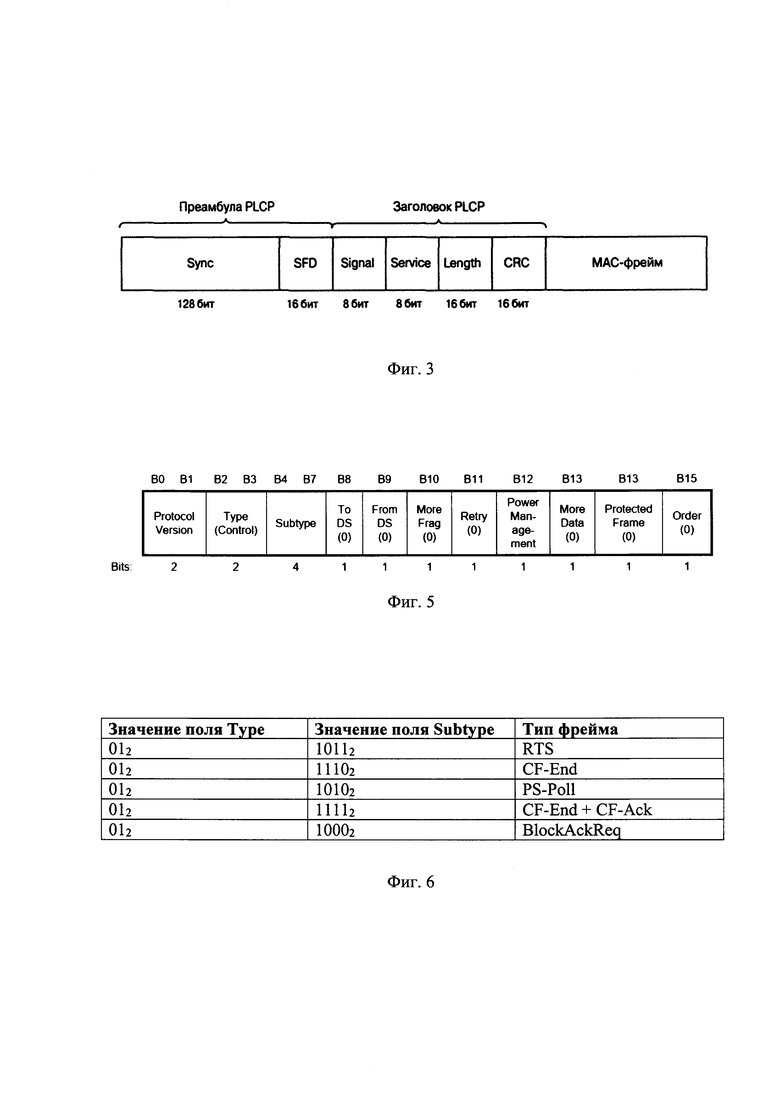
на фиг. 3 приведена структура преамбулы и заголовка PLCP передаваемого фрейма в стандарте IEEE 802.11b;
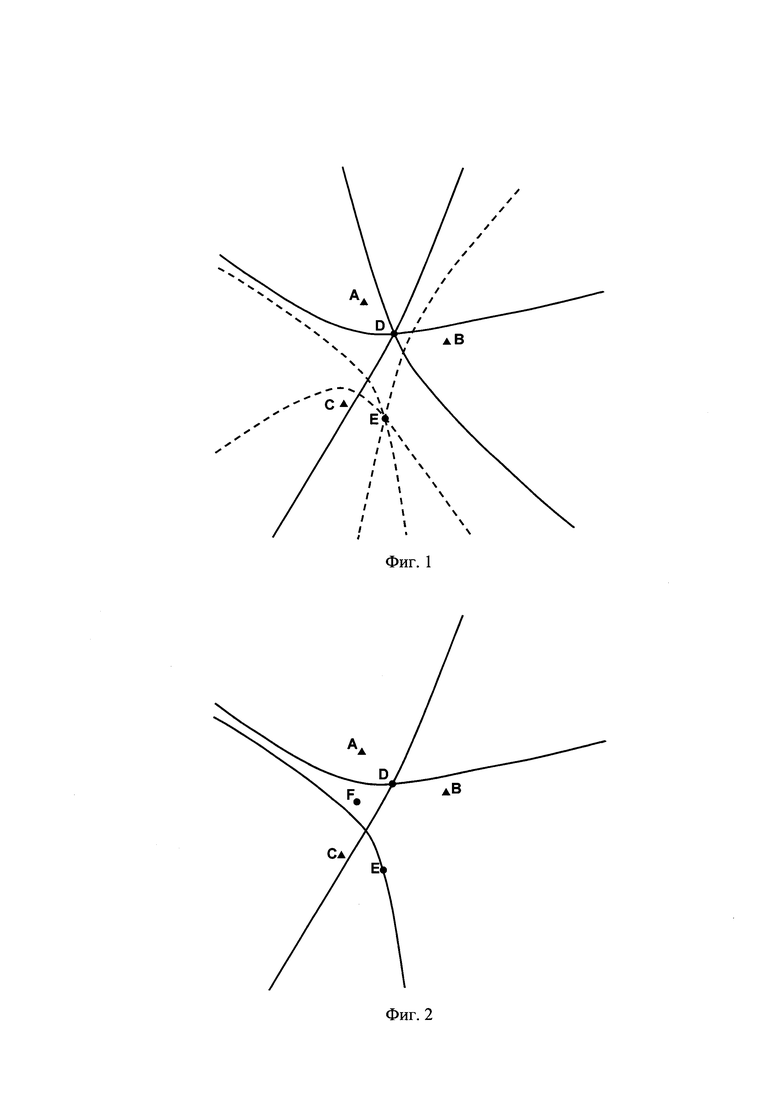
на фиг. 4 показана структура известных МАС-фреймов:
а) CTS МАС-фрейм;
б) PS-Poll МАС-фрейм;
в) CF-End МАС-фрейм;
г) CF-End+CF-Fck МАС-фрейм;
д) BlockAckRed МАС-фрейм;
на фиг. 5 приведена структура поля Frame Control МАС-фрейма;
на фиг. 6 иллюстрируется значение полей Туре и Subtype для различных типов фрейма;
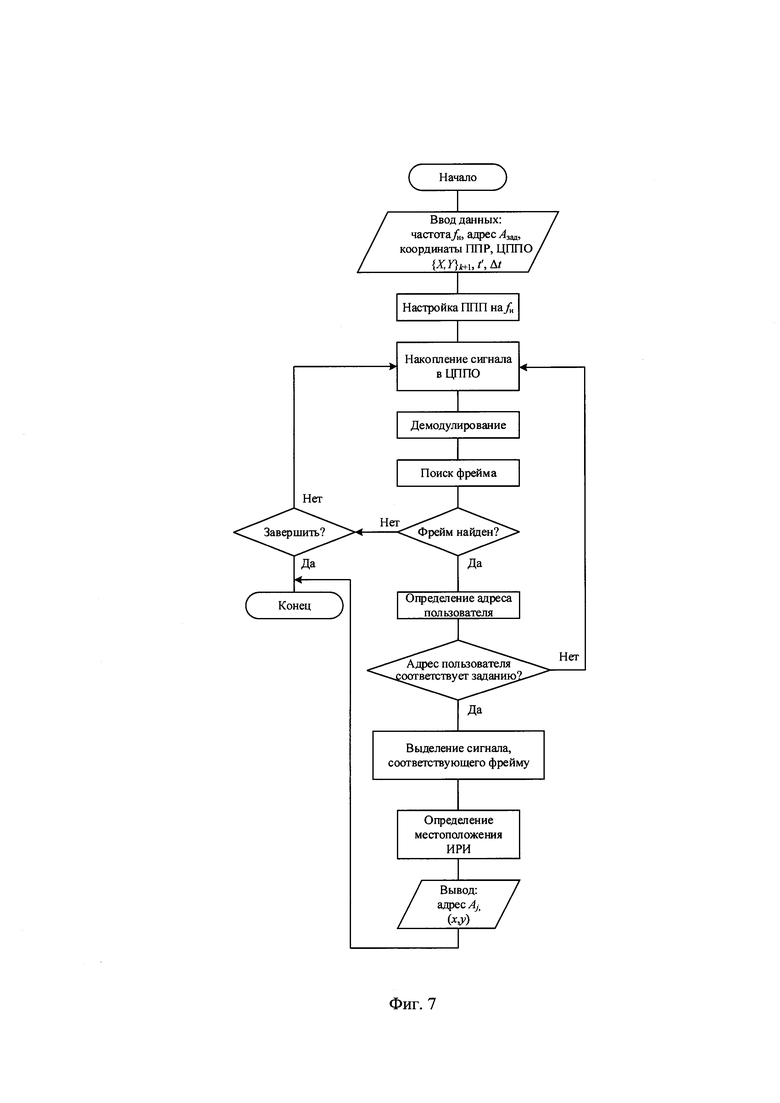
на фиг. 7 показан обобщенный алгоритм работы разностно-дальномерного способа определения координат ИРИ в соответствии с заявляемым изобретением;
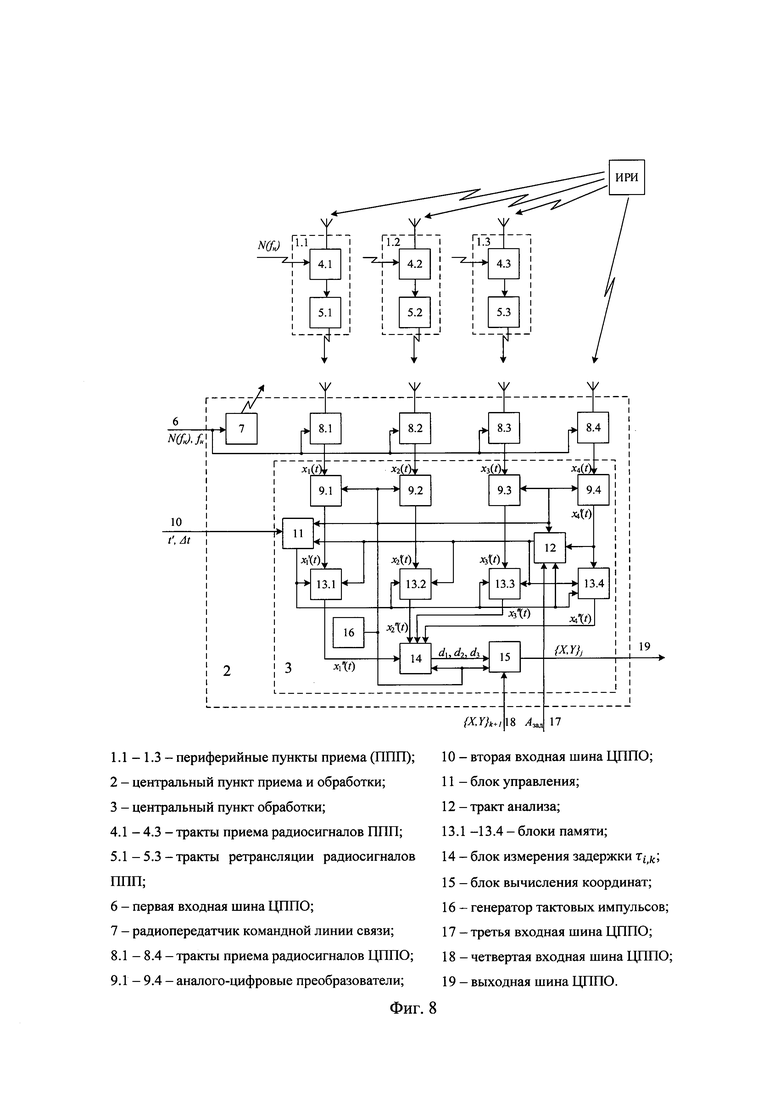
на фиг. 8 приведена обобщенная структурная схема устройства, реализующего данный способ;
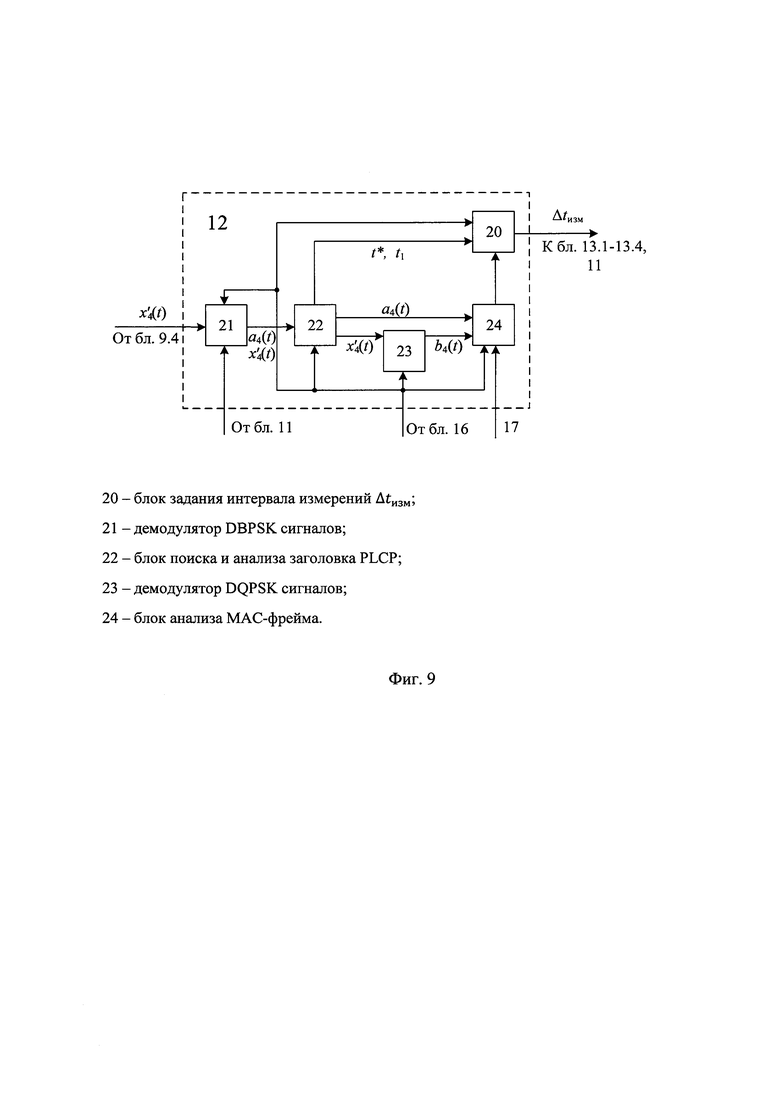
на фиг. 9 показана структурная схема тракта анализа;
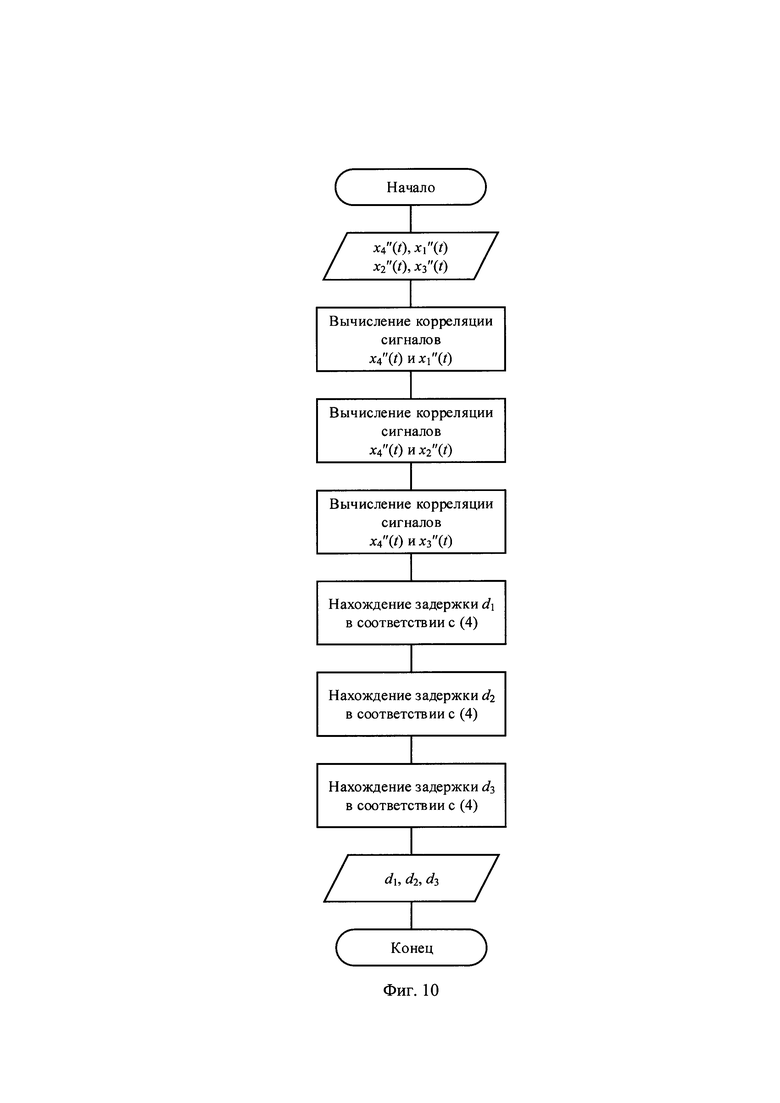
на фиг. 10 показан алгоритм работы блока измерения задержки τi,k;
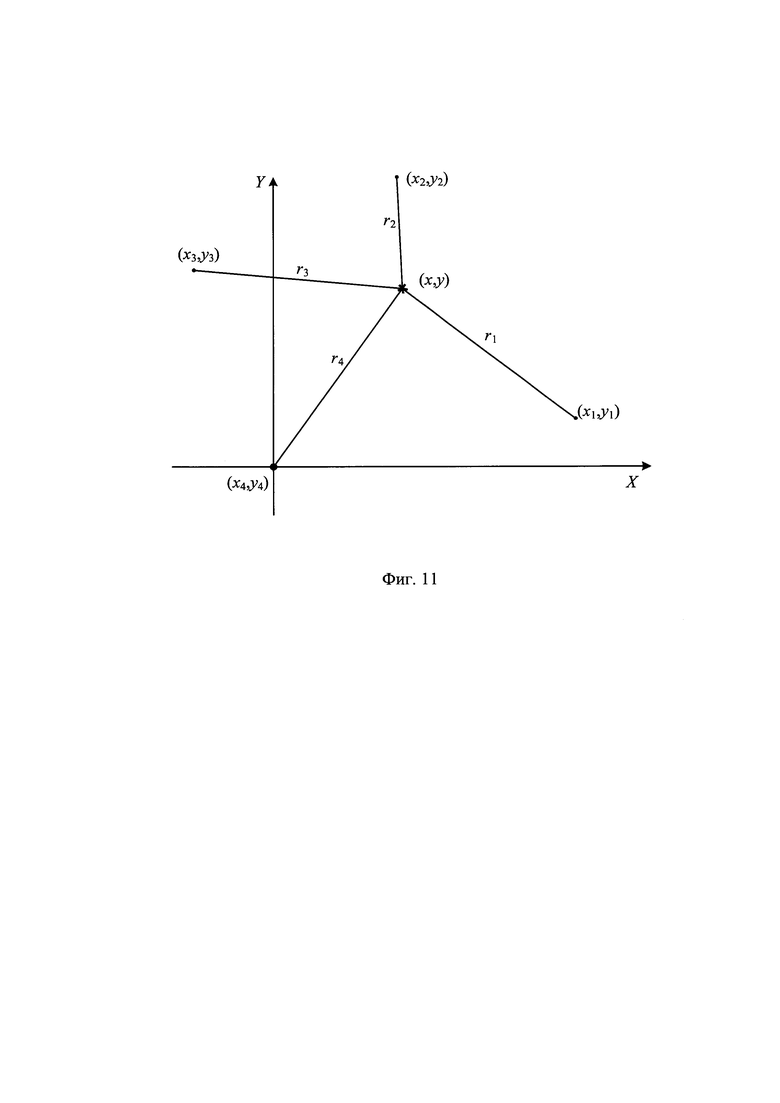
на фиг. 11 иллюстрируется система координат с центров ЦППО (х4, у4);
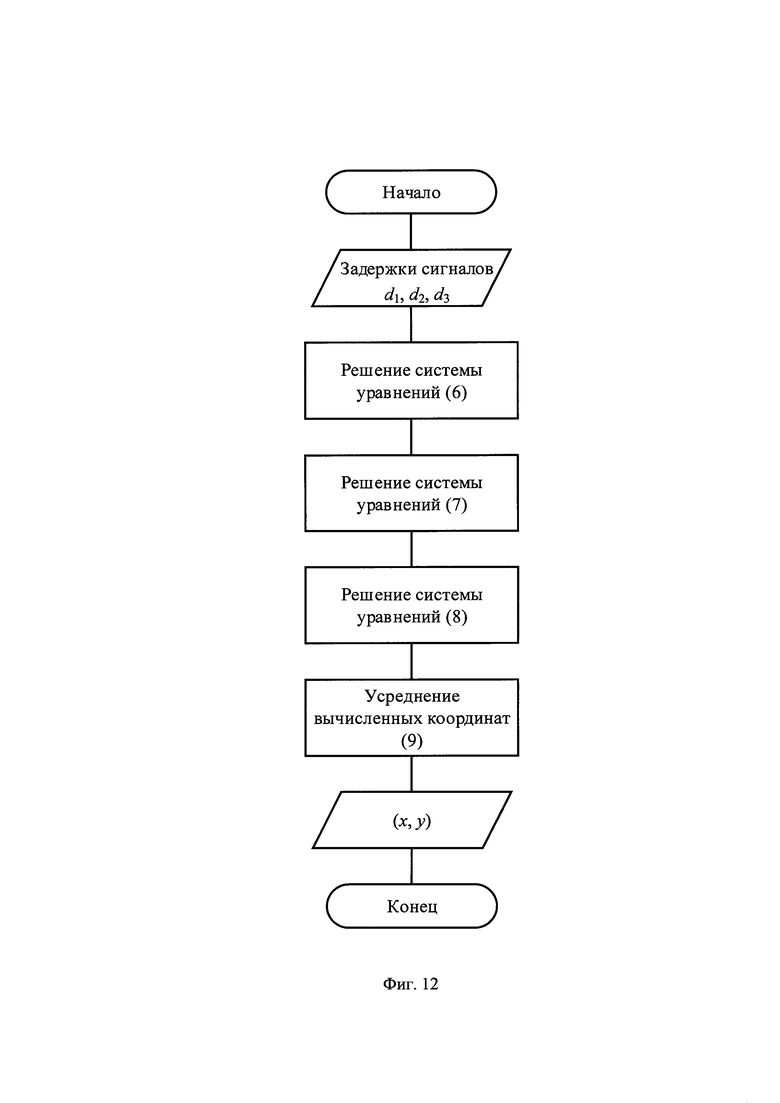
на фиг. 12 показан алгоритм работы блока измерения координат;
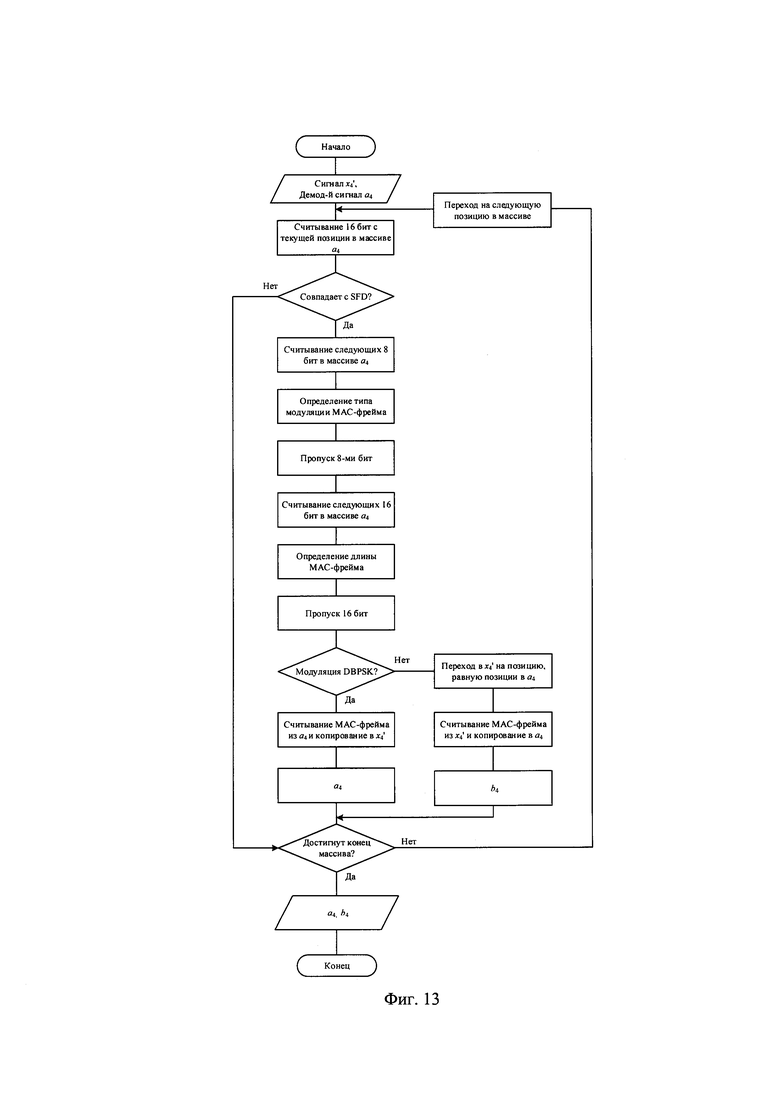
на фиг. 13 приведен алгоритм работы блока поиска и анализа заголовка PLCP.
Предлагаемый способ ниже рассмотрен на примере широко используемых сетей Wi-Fi. Известно, что в стандарте IEEE 802.11b (см. Приложение Г (информационное). Стандарт IEEE 802.11а, b, g, n. Беспроводные сети передачи данных Wi-Fi. Электронный ресурс. HTTP://ab57.ru/soft/wifidoc.pdf. Дата обращения 23.01.2019) в режиме DSSS в начале каждого отправляемого фрейма данных содержится преамбула и заголовок PLCP, модулированные посредством DBPSK модуляции (см. фиг. 6). В преамбуле, в поле SFD находится индикатор начала фрейма в виде 0xF3A0. В заголовке PLCP содержится информация о способе модуляции самих данных (МАХ-фрейм) и их длина. В поле Signal находится информация о типе цифровой модуляции МАС-фрейма. Значение 0х0А соответствует DBPSK, а 0x14 DQPSK модуляции. Выполнив соответствующий вид демодуляции в начале МАС-фрейма определяют адрес пользователя (устройства ИРИ). Если МАС-адрес обнаруженного фрейма совпадает с МАС-адресом заданного ИРИ, местоопределение которого необходимо определить, то интервал времени, использованный для передачи от преамбулы до завершения данных (МАС-фрейм) целесообразно использовать для местоопределения.
Реализация заявляемого способа поясняется следующим образом (см. фиг. 7, 8 и 9). На подготовительном этапе задают МАС-адрес пользователя Aj, координаты ППП и ЦППО {X, Y}k+1, длительность интервала анализа Δt и его начало t', частота сигнала ƒн.
Обобщенная структурная схема устройства, реализующего данный способ, содержит три ППП (k∈1, 2 и 3) и один ЦППО (i∈0). Каждый ППП сигналов ИРИ с временным или кодовым разделением в общем виде представляет совокупность последовательно соединенных трактов приема сигналов ИРИ названных классов и трактов, реализующих аналоговую ретрансляцию излучений. ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, совокупность из k+1 трактов приема радиосигналов (из них k трактов, предназначенных для приема ретранслированных ППП сигналов) и центральный пункт обработки (ЦПО) в составе: блок управления, тракт анализа, k+1 аналогово-цифровых преобразователей (АЦП), k+1 блок памяти, блок измерения задержек τi,k и блок расчета координат. При этом все ППП настраиваются на заданную частоту сигнала, значение которой поступает на командным каналам связи от ЦППО.
Сигналы ИРИ, принятые на ЦППО и ППП имеют вид
соответственно.
Последние с выходов приемных трактов ППП поступают на входы соответствующих трактов аналоговой ретрансляции и далее излучают в эфир.
На ЦППО эти излучения принимают с помощью соответствующих k приемных трактов и запоминаются на заданное время Δt. Одновременно с ними осуществляют прием сигналов этого ИРИ и на собственное k+1-вый приемный тракт в течение того же интервала времени Δt, в течение которого осуществляют их анализ.
Для этого принятые в k+1-м приемном тракте ЦППО сигналы демодулируют (снимают DBPSK модуляцию), превращая аналоговый сигнал x4(t) в битовую последовательность a4(t). На его основе осуществляют поиск преамбулы и заголовка PLCP (см. фиг. 3). В преамбуле в поле SFD содержится значение 0xF3A0, которое служит индикатором начала фрейма. В заголовке PLCP в поле Signal содержится информация о способе цифровой модуляции самих данных (МАС-фрейма). Значение 0x0A соответствуют DBPSK модуляции, a 0x14-DQPSK модуляции. Кроме того, в заголовке PLCP содержится информация о длине данных в МАС-фрейме.
Известны МАС-фреймы различных типов: CTS - фиг. 3а, PS-Poll - фиг. 4б, CF-End - фиг. 4в, CF-End+CF-Ack - фиг. 4г, Block Ack Req - фиг. 4д. Помимо перечисленных, существуют и другие типы МАС-фреймов, однако в них отсутствует информация о МАС-адресах передающего устройства. Поэтому их использование затруднено для местоопределения ИРИ.
У всех фреймов в их начале есть поле Frame Control (см. фиг. 5), где содержится информация о типе данного фрейма - это поля Туре и Subtype. Значение этих полей для каждого фрейма показано на фиг. 6. В поле ТА у фреймов содержится МАС-адрес передающего устройства. Для получения названных данных необходимо предварительно выполнить цифровую демодуляцию МАС-фрейма в соответствии с содержимым поля Signal заголовке PLCP.
В случае совпадения МАС-адреса Aj обнаруженного фрейма с заданным адресом Азад устройства, участок сигнала с границами от начала преамбулы PLCP t* до конца МАС-фрейма t1 используют для нахождения τi,k. При этом свертка принятых ЦППО и ППП сигналов Ri,k может осуществляться как в аналоговом, так и в дискретном виде. В случае использования дискретных сверток (предлагаемый вариант устройства) запомненные сигналы от ППП дополнительно оцифровывают.
Дополнительная синхронизация при измерении τi,k не требуется в связи с тем, что обработку всех k+1 сигналов осуществляют в одном месте. Нахождение задержек τi,k с последующим определением координаты ИРИ выполняют в соответствии со способом-прототипом.
Таким образом, имеет место следующая последовательность операций:
1 Накопление в ЦППО сигналов за некоторый промежуток времени Δt от всех ППП и ЦППО.
2 Демодуляция накопленного сигнала, принятого собственно ЦППО и модулированного посредством DBPSK модуляции. В результате получают массив битов.
3 Поиск в массиве битов SFD кода - значения 0xF3A0 (11110011101000002).
4 Чтение заголовка PLCP - следующие 48 бит после SFD кода.
5 Определение способа модуляции МАС-фрейма: в поле Signal заголовка PLCP: значение 0х0А (000010102) соответствуют DBPSK модуляции, 0x14 (000101002) - DQPSK - модуляции.
6 Определение длины МАС-фрейма - поле Length заголовка PLCP.
7 Демодуляция МАС-фрейма.
8 Определение МАС-адреса устройства.
9 Если МАС-адрес устройства соответствует МАС-адресу искомого устройства, то выделяют часть сигнала, соответствующего началу преамбулы PLCP и окончанию МАС-фрейма, если не соответствует, то, начиная с конца текущего фрейма, осуществляется поиск следующего фрейма (пункт 3).
10 Определение в названном интервале задержек τi,k и на их основе местоположения устройства способом, указанным в прототипе, используя выделенный сигнал.
Сопоставительный анализ предлагаемого технического решения с прототипом показывают, что предлагаемый способ отличается от известного тем, что перед вычислением времени задержки принимаемых сигналов осуществляют обнаружение и анализ частотно-временной структуры сигналов с временным и кодовым разделением каналов, на основе которого определяют принадлежность МАС-фреймов и необходимый временной интервал для измерений задержек τi,k. Следовательно, положительного эффекта достигают благодаря выполнению дополнительной обработке сигналов на ЦППО.
Заявленное устройство определения координат ИРИ на основе разностно-дальномерного способа содержит k периферийных пунктов приема 1.1-1.k и центральный пункт приема и обработки 2, причем каждый ППП 1.1-1.k состоит из последовательно соединенных тракта приема радиосигналов 4 и тракта ретрансляции радиосигналов 5, а ЦППО 2 содержит радиопередатчик 7, предназначенный для реализации командной линии связи, k+1 трактов приема радиосигналов 8.1-8.k+1 и центральный пост обработки 3, k+1 входов которого соединены с выходами соответствующих трактов приема радиосигналов 8.1-8.k+1, а выход является выходной шиной 19 ЦППО 2, первая входная шина которого является входом управления радиопередатчика 7 и соединена со входами управления трактов приема радиосигналов 8.1-8.k+1, предназначена для задания частоты настройки ƒн трактов приема радиосигналов 8.1-8.k+1 ЦППО и опосредованно через радиостанцию 7 трактов приема радиосигналов 4.1-4.k ППП. ЦПП выполнен содержащим k+1 аналого-цифровых преобразователей 9.1-9.k+1, входы которых соединены с выходами соответствующих трактов приема радиосигналов 8.1-8.k+1, k+1 блоков памяти 13.1-13.k+1, информационные входы которых соединены с выходами соответствующих аналого-цифровых преобразователей 9.1-9.k+1, последовательно соединенные блок измерения задержек 14 и блок измерения координат 15, выход которого является выходом ЦПО 3 и выходной шиной 19 ЦППО 2, группа из k+1 входов блока измерения задержки 14 соединена с информационными выходами соответствующих k+1 блоков памяти 13.1-13.k+1, блок управления 11 и трак анализа 12, второй вход которого является вторым установочным входом ЦПО 3 и третей входной шиной 17 ЦППО 2, предназначенной для задания адреса пользователя Aj, первый информационный вход тракта анализа 12 соединен с выходом k+1-го аналого-цифрового преобразователя 9.k+1, а выход объединен с первыми входами управления k+1 блоков памяти 13.1-13.k+1 и вторым входом блока управления 11, первый вход которого является первым установочным входом ЦПО 3 и второй входной шиной 10 ЦППО 2, предназначенной для задания интервала анализа Δt и его начала t', а выход объединен со вторыми входами управления блоков памяти 13.1-13.k+1, четвертая входная шина 18 ЦППО 2, предназначенная для задания координат ППП и ЦППО {X, Y}k+1, соединена со вторым входом блока расчета координат 15 ЦПО 3 и является третьим установочным входом ЦПО 3, генератор тактовых импульсов 16, выход которого соединен со входами синхронизации АЦП 9.1-9.k+1, блока управления 11, тракта анализа 12, блока измерения задержки τi,k 14 и блока вычисления координат 15.
При этом тракт анализа 12 содержит последовательно соединенные демодулятор DBPSK сигналов 21, блок поиска и анализа заголовка PLCP 22, демодулятор DQPSK сигналов 23, блок анализа МАС-фрейма 24 и блок задания интервала измерений Δtизм 20, выход которого является выходом тракта анализа 12, а информационный вход соединен с третьим выходом блока поиска и анализа заголовка PLCP 22, второй выход которого соединен со вторым входом блока анализа МАС-фрейма 24, третий вход которого является вторым входом тракта анализа 12, а вход демодулятора DBPSK 21 является первым входом тракта анализа 12, третий вход которого соединен со входом управления демодулятора DBPSK сигналов 21, а вход синхронизации тракта анализа 12 объединен со входами синхронизации блока задания интервала измерений 20, демодулятора DBPSK сигналов 21, блока поиска и анализа заголовка PLCP 22, демодулятора DQPSK сигналов 23 и блока анализа МАС-фрейма 24.
Работа устройства (см. фиг. 7, 8 и 9) осуществляется следующим образом. На подготовительном этапе задают структуру измерителя: количество ППП 1 k, k=3, определяют их координаты {X, Y}k+1 (работа устройства рассматривается на плоскости {X, Y}). Определяют координаты ЦППО {X, Y}k+1. По шине 18 полученные данные заносят в блок расчета координат 15 ЦПО 3. По второй входной шине ЦППО 10 задают интервал анализа Δt (временной интервал, на который одновременно запоминают в блоках 13.1-13.4 сигналы ИРИ) и его начало t'. По первой входной шине ЦППО 6 поступает значение частоты ƒн для настройки на нее приемных трактов 8.1-8.4 ЦППО 2. Опосредованно через радиостанцию 7 с помощью кода частоты N(ƒн) осуществляют настройку приемных трактов 4.1-4.3 ППП 1. Третья входная шина 17 ЦППО 2 используется для задания МАС-адреса пользователя Азад, координаты которого необходимо определить.
Каждый ППП 1.1-1.3 сигналов ИРИ представляет совокупность последовательно соединенных трактов приема радиосигналов 4.k и тракт ретрансляции радиосигналов 5.k, k=1, 2 или 3. Тракты 4.k настраиваются на заданную частоту ƒн по команде N(ƒн), поступающей от ЦППО 2 по линии командной радиосвязи. Центральный пункт приема и обработки 2 содержит радиопередатчик 7, предназначенный для реализации командной линии связи, совокупность из k+1 (четырех) трактов приема радиосигналов 8.1-8.4 и центральный пункт обработки 3 (см. фиг. 8) в составе: блок управления 11, тракт анализа 12, аналого-цифровые преобразователи 9.1-9.4, блоки памяти 13.1-13.4, блок измерения задержки τi,k 14 и блок расчета координат 15.
Сигналы ИРИ, принятые на ЦППО 2 и ППП 1.1-1.3 и имеющие вид (1) на входах трактов 8.1-8.4 поступают на входы соответствующих АЦП 9.1-9.4. Оцифрованные сигнальные потоки а1(t), a2(t), a3(t), a4(t) с выходов блоков 9.1-9.4 далее следуют на информационные входы соответствующих блоков памяти 13.1-13.4. Операция одновременной записи сигналов в блоки 13.1-13.4 осуществляется по команде блока управления 11 в момент времени t', которая поступает на их вторые управляющие входы. Для этого на выходе блока 11 формируется импульс прямоугольной формы заданной длительности Δt. Значение Δt выбирается из расчета:

где tпр - длительность преамбулы PLCP 144 бит, tзаг - длительность заголовка PLCP 48 бит, tcp - средняя длительность МАС-файла. За интервал времени Δt необходимо обнаружить и проанализировать целостное излучение одного из пользователей системы Wi-Fi.
Сигналы ИРИ, принятые непосредственно на ЦППО 2 трактом 8.4 x4(t) и преобразованные в цифровую форму  блоком 9.4, поступают на вход тракта анализа 12. Его работа начинается в момент времени t' с приходом управляющего сигнала блока 11 на его третий вход. В функции тракта 12 входит определение начала очередного фрейма t*, его длительность Δtj (длину), вид модуляции МАС-фрейма и его демодуляция, определение адреса текущего пользователя Aj, сравнение его с заданным на подготовительном этапе работы устройства адресом Азад. При положительном решении выдает временной интервал
блоком 9.4, поступают на вход тракта анализа 12. Его работа начинается в момент времени t' с приходом управляющего сигнала блока 11 на его третий вход. В функции тракта 12 входит определение начала очередного фрейма t*, его длительность Δtj (длину), вид модуляции МАС-фрейма и его демодуляция, определение адреса текущего пользователя Aj, сравнение его с заданным на подготовительном этапе работы устройства адресом Азад. При положительном решении выдает временной интервал  измерения пространственных параметров заданного j-го ИРИ,
измерения пространственных параметров заданного j-го ИРИ,  который начинается с момента t*. Здесь tj - длительность МАС-фрейма Aj-го абонента. Однако при определении значения
который начинается с момента t*. Здесь tj - длительность МАС-фрейма Aj-го абонента. Однако при определении значения  следует учитывать задержки сигнала ИРИ в точках его приема и с ЦППО и ППП. В противном случае это может привести к погрешностям измерения задержек сигналов. Поэтому временной интервал целесообразно сократить и начать с заголовка фрейма.
следует учитывать задержки сигнала ИРИ в точках его приема и с ЦППО и ППП. В противном случае это может привести к погрешностям измерения задержек сигналов. Поэтому временной интервал целесообразно сократить и начать с заголовка фрейма.
После принятия решения об обнаружении сигналов заданного Aj-го абонента тракта 12 формируется управляющий сигнал, поступающий на первые входы управления блоков памяти 13.1-13.4. В результате и содержимое последних начиная с момента t* и до окончания j-го фрейма t1 поступает на соответствующие входы блока измерения задержек τi,k 14.
В функции блока 14 входит измерение задержек сигнала τi,k известным способом (см. Пат. РФ №2539968, МПК G01S 3/46).
Измеренные задержки сигналов τi,k с выхода блока 14 поступают на вход блока вычисления координат 16. В функции последнего входит на основе полученных значения задержек сигнала ИРИ τi,k, координат ЦППО и ППП определить местоположение заданного Aj-го абонента. Синхронная работа АЦП 9.1-9.4, блока управления 11, тракта анализа 12, блока измерения задержек τi,k и блока расчета координат 15 осуществляется импульсами генератора тактовых импульсов 16.
В противном случае, когда фрейм с заданным Aj-м абонентом в рамках интервала времени Δt не обнаружен, трактом 12 формируется управляющий сигнал, поступающий на первые входы управления блоков памяти 13.1-13.4, который обнуляет их содержимое. Кроме того, этот сигнал поступает на второй вход блока управления 11. В результате блоком 11 формируется новый управляющий сигнал длительностью Δt, в результате появления которого начинается новый цикл работы устройства по записи очередной выборки сигналов ИРИ в блоки 13.1-13.4 и их анализ.
Тракт анализа 12 предназначен для поиска на интервале времени Δt сигнала очередного фрейма, определении его границ и адреса пользователя Aj сравнении полученного адреса Aj с заданным Азад. При их совпадении тракт 12 формирует управляющий сигнал для одновременного изъятия запомненного в блоках 13.1-13.4 сигнала во временных границах обнаруженного фрейма. Для этого с помощью демодулятора DBPSK сигналов 21 (см. фиг. 9) осуществляют операцию цифровой DBPSK демодуляции выборки сигнала длительностью Δt. Управляющий сигнал длительностью Δt на выполнение этой операции поступает на управляющий вход блока 21 с выхода блока управления 11. Демодулированный в блоке 21 сигнал a4(t) (совместно с недемодулированным  ) далее поступает на вход блока поиска и анализа заголовка PLCP 22. Здесь на основе a4(t) определяют начало фрейма, тип модуляции МАС-фрейма и его длительность. Значения границ обнаруженного фрейма с первого выхода блока 22 поступают на первый вход блока задания интервала измерений 20. Далее, в случае необходимости выполняют демодуляцию цифровой последовательности
) далее поступает на вход блока поиска и анализа заголовка PLCP 22. Здесь на основе a4(t) определяют начало фрейма, тип модуляции МАС-фрейма и его длительность. Значения границ обнаруженного фрейма с первого выхода блока 22 поступают на первый вход блока задания интервала измерений 20. Далее, в случае необходимости выполняют демодуляцию цифровой последовательности  с помощью блока 23 (с помощью демодулятора DQPSK сигналов), после чего анализируемый сигнал
с помощью блока 23 (с помощью демодулятора DQPSK сигналов), после чего анализируемый сигнал  следует на второй вход блока 24. Иначе, принятый цифровой a4(t) сигнал со второго выхода блока 22 напрямую поступает на первый вход блока анализа МАС-фрейма 24. Здесь определяют адрес пользователя Aj, сравнивают его с заданным адресом Азад, поступившим по шине 17 ЦППО 2. В случае положительного решения Aj=Азад на выходе блока 24 формируется управляющий сигнал, поступивший на второй вход блока 20. В этом случае на выходе последнего формируются значения границ (t*, t1) обнаруженного фрейма, которые в дальнейшем используют в качестве Δtизм. В противном случае, при несовпадении Aj≠Азад блоком 24 формируется управляющий сигнал, с помощью которого обнуляется содержимое блока 20. В свою очередь блок 20 формирует управляющий сигнал, поступающий на входы управления блоков памяти 13.1-13.4 обнуляя их содержимое. Кроме того, этот же сигнал поступает на второй вход блока 11. В результате с помощью блока 11 осуществляют запуск нового цикла работы устройства (формирование прямоугольного импульса длительностью Δt).
следует на второй вход блока 24. Иначе, принятый цифровой a4(t) сигнал со второго выхода блока 22 напрямую поступает на первый вход блока анализа МАС-фрейма 24. Здесь определяют адрес пользователя Aj, сравнивают его с заданным адресом Азад, поступившим по шине 17 ЦППО 2. В случае положительного решения Aj=Азад на выходе блока 24 формируется управляющий сигнал, поступивший на второй вход блока 20. В этом случае на выходе последнего формируются значения границ (t*, t1) обнаруженного фрейма, которые в дальнейшем используют в качестве Δtизм. В противном случае, при несовпадении Aj≠Азад блоком 24 формируется управляющий сигнал, с помощью которого обнуляется содержимое блока 20. В свою очередь блок 20 формирует управляющий сигнал, поступающий на входы управления блоков памяти 13.1-13.4 обнуляя их содержимое. Кроме того, этот же сигнал поступает на второй вход блока 11. В результате с помощью блока 11 осуществляют запуск нового цикла работы устройства (формирование прямоугольного импульса длительностью Δt).
Реализация элементов предложенного устройства известна и трудностей не вызывает. Аналого-цифровые преобразователи 9.1-9.4 могут быть реализованы на микросхемах LTC 2208 производства Analog Devices.
Блок измерения задержек τi,k 14 предназначен для определения задержек в приеме сигналов в пространственно разнесенных ППП 1.1-1.3. В блоке 14 вычисляют корреляционные функции сигналов

Далее на основе (3) находят задержки сигнала на ППП 1.i относительно ЦППО 2 как аргумент максимизации корреляционной функции
Блок 14 может быть реализован на DSP-процессоре компаний: Analog Devices, Freescale или Texas Instrument, например TMS 320C55x. Алгоритм работы блока 14 приведен на фиг. 10.
Блок 15 предназначен для определения координат заданного ИРИ {X, Y}j на основе найденных в блоке 14 значений задержек сигналов dl, d2 и d3. Для этого вводится система координат с центром в ЦППО (см. фиг. 11) с координатами (х4, у4), причем х4=0, у4=0. В точках (x1, y1), (x2, y2) и (x3, y3) находятся соответственно первый, второй и третий ППП. Расстояние от ИРИ до ЦППО, первого, второго и третьего ППП обозначены как r4, r1 r2 и r3 соответственно. Разность расстояний между ИРИ и i-м ППП (i=1, 2, 3) будет иметь вид:

где с - скорость света, xi, yi - координаты i-го ППП, (i=1, 2, 3).
В силу того обстоятельства, что невозможно абсолютно точно определить задержку сигнала, система (5) не имеет решения. Поэтому приведенные уравнения группируют попарно и получают три системы уравнений:



Решая каждую из систем уравнений (6), (7) и (8) находим точки возможного местоположения ИРИ: (х', у'), (х'', у'') и (х''', у'''). Результирующее местоположение находят из выражения

Блок расчета координат 15 может быть реализован на DSP-процессоре MSC 81хх фирмы Freescale, алгоритм работы которого приведен на фиг. 12.
Блок управления 11 предназначен для организации записи сигналов ИРИ в блоки памяти 13.1-13.4 «пакетами» заданной длительности Δt. Может быть выполнен из последовательно соединенных таймере и RS-триггере на элементной базе микросхем ТТЛ-серии.
Блоки памяти 13.1-13.4 реализуют по известным схемам (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Горденов и др. - М.: Радио и связь, 1990. - 288 с.).
Построение генератора тактовых импульсов 16 известно и широко освещено в литературе (см. Тактовый генератор: устройство, принцип работы, применение. Электронный ресурс: http://fb.ru/article/452508/taktovyiy-generator-ustroystvo-printsip-rabotyi-primenenie. Обращение 14.02.2019).
Тракты 4.1-4.3, 5.1-5.3 и 8.1-8.4 реализуют аналогично соответствующим трактам прототипа.
Реализация демодулятора сигналов относительной (дифференциальной) двоичной фазовой манипуляции DBPSK 21 известна и трудностей не вызывает (см. Сигналы с двоичной фазовой манипуляцией (DBPSK). Дифференциальная BPSK (DBPSK). Теория и практика цифровой обработки сигналов. Электронный ресурс: http://www.dsplib.ru/content/bpsk/bpsk.html. Обращение 14.02.2019).
Демодулятор сигналов дифференциальной квадратурной фазовой манипуляцией DQPSK 23 известен и трудностей не вызывает (см. Мелихов С.В. Методы манипуляции цифровой радиосвязи. Учебное пособие для студентов радиотехнических специальностей. - Томск: ТГУСУЗ, 2017. - 64 с.).
Блок анализа МАС-фрейма 24 предназначен для сравнения адреса текущего фрейма Aj с заданным по шине 18. Представляет из себя блок сравнения, реализация которого трудностей не вызывает. Может быть реализован на электронной логике микросхем ТТЛ-серии.
Блок задания интервала измерений Δtизм 20 предназначен для задания временных границ t* и t1 измерения пространственных параметров, заданного ИРИ (t*, t1)∈tизм. Измеренные в тракте 12 текущие значения (t*, t1) поступают на его выход (выход блока 20) в том случае, если на выходе блока 24 формируется управляющий сигнал, соответствующий совпадению Aj=Азад. После завершения интервала Δtизм блоком 20 формируются управляющий сигнал, обнуляющий содержимое блоков 13.1-13.4. В противном случае, когда Aj≠Азад, значение Δtзад на выход блока 20 не поступает, а на его выходе формируется управляющий сигнал, предназначенный для обнуления блоков 13.1-13.4 и перевод блока 11 в новое состояние. Реализация блока задания интервала измерений Δtизм 20 известно и трудностей не вызывает. Представляет из себя селектор (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок поиска и анализа заголовка PLCP 22 предназначен для определения начала фрейма, типа модуляции МАС-фрейма и его длительности. Эти функции блок 22 выполняет путем сравнения входного цифрового потока  с априорными данными, хранящимися в его постоянном запоминающем устройстве. В связи с тем, что в блоке 22 реализуется самая затратная по времени операция, которую необходимо выполнять в режиме реального времени, функции блока целесообразно выполнять с использованием программируемой логической интегральной схемы (ПЛИС) типа Virtex 5 XC5VSX50T. Алгоритм работы блока 22 приведен на фиг. 13. Совместно с блоком 22 на ПЛИС целесообразно реализовать блоки 21 и 23.
с априорными данными, хранящимися в его постоянном запоминающем устройстве. В связи с тем, что в блоке 22 реализуется самая затратная по времени операция, которую необходимо выполнять в режиме реального времени, функции блока целесообразно выполнять с использованием программируемой логической интегральной схемы (ПЛИС) типа Virtex 5 XC5VSX50T. Алгоритм работы блока 22 приведен на фиг. 13. Совместно с блоком 22 на ПЛИС целесообразно реализовать блоки 21 и 23.
В случае использования аналоговых сигналов для определения координат ИРИ необходимость в блоках 9.1-9.3 отпадает. Принятые трактами 8.1-8.4 сигналы непосредственно поступают на информационные входы соответствующих блоков памяти 13.1-13.4. Блок 9.4 остается для обеспечения штатной работы тракта анализа 12.
Кроме того, определение координат заданного ИРИ, работающего в отличной от рассмотренной выше системе связи, например, GSM G2, предполагает использование тракта анализа 12 согласованной с ней структуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения (варианты) и устройство для их реализации | 2020 |
|
RU2740640C1 |
| Разностно-дальномерный способ определения местоположения объектов | 2022 |
|
RU2790347C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2021 |
|
RU2790348C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2568104C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ MSK СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2016 |
|
RU2623094C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ МИНИМАЛЬНОГО ЧАСТОТНОГО СДВИГА (MSK) СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2020 |
|
RU2747108C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
Группа изобретений относится к радиотехнике и может быть использована в многопозиционных радиотехнических системах для определения координат заданных источников радиоизлучения (ИРИ) с кодовым и временным разделением каналов. Достигаемый технический результат - определение местоположения ИРИ в условиях работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов. Технический результат в разностно-дальномерном способе достигается за счет одновременного запоминания в центральном пункте приема и обработки (ЦППО) на интервале времени Δt сигналов ИРИ, принятых на периферийных пунктах приема (ППП) и ЦППО, демодулирования принятых на ЦППО сигналов ИРИ, поиска и анализа преамбулы и заголовка обнаруженного фрейма, определения начала МАС-фрейма и его длительности, адреса пользователя, сравнения адреса пользователя обнаруженного фрейма с заданным для поиска, при их совпадении измерения разности времени приема ретранслированных сигналов и принятых в ЦППО на интервале времени от начала преамбулы до конца МАС-фрейма. Технический результат в устройстве достигают благодаря введению новых элементов в центральный пост обработки: четырех аналого-цифровых преобразователей, блока управления, тракта анализа, четырех блоков памяти и генератора тактовых импульсов с соответствующими связями. 2 н. и 1 з.п. ф-лы, 13 ил.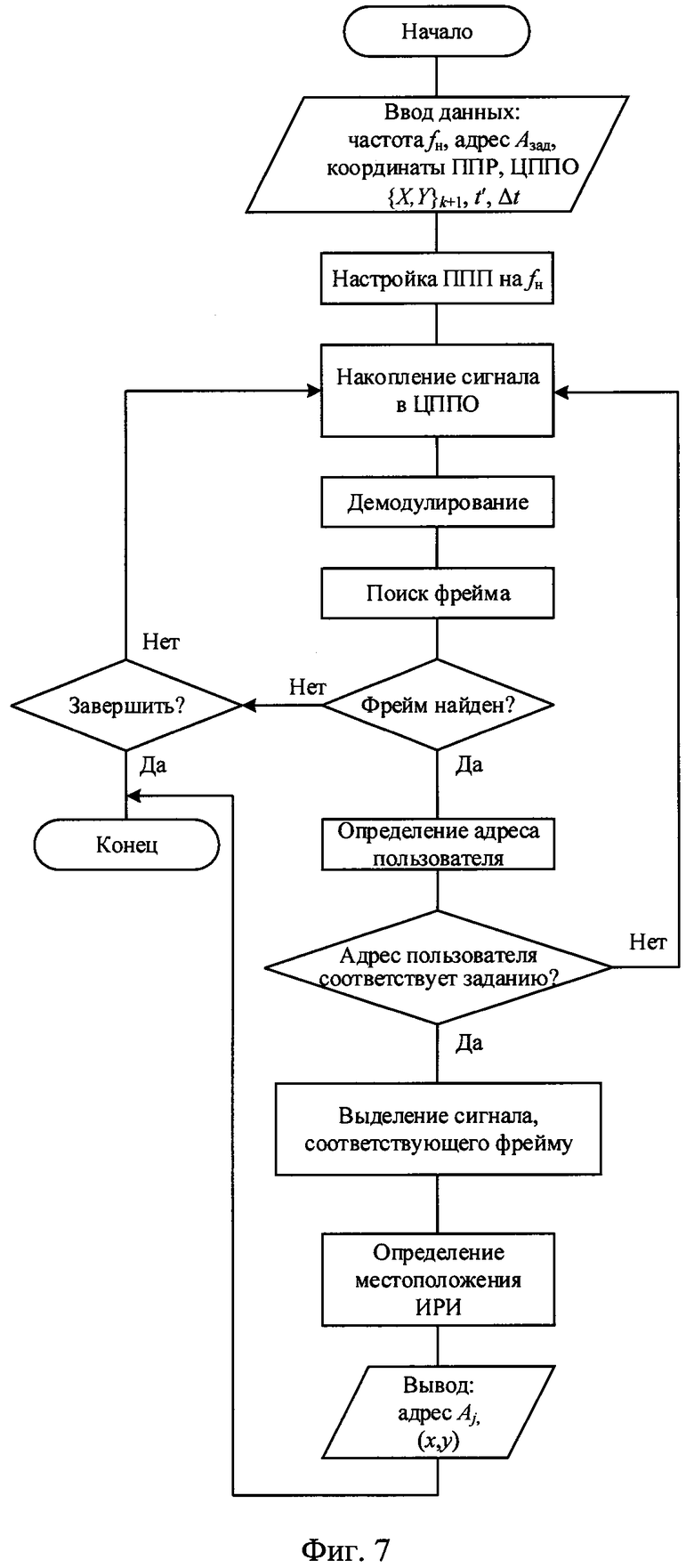
1. Разностно-дальномерный способ определения координат источника радиоизлучения (ИРИ), основанный на приеме сигналов пространственно разнесенными периферийными пунктами приема (ППП) с известными координатами, связанными с центральным пунктом приема и обработки (ЦППО) командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разность времени приема этих сигналов в ППП и ЦППО τi,k как аргументы максимизации модуля взаимокорреляционной функции, где i, k∈0, 1, …, N - номера ЦППО и ППП соответственно, на основе которых определяют координаты ИРИ, отличающийся тем, что на ЦППО одновременно запоминают на интервале времени Δt сигналы ИРИ, принятые в ЦППО и во всех k ППП, демодулируют принятые в ЦППО сигналы ИРИ, на основе анализа полученного битового массива данных осуществляют поиск и анализ преамбулы и заголовка PLCP текущего фрейма, определяют начало МАС-фрейма, его длительность Δtфj и адрес пользователя Aj, j=1, 2, …, J, сравнивают полученный адрес с заданным для поиска, при их совпадении на интервале времени от начала преамбулы PLCP до конца j-го МАС-фрейма измеряют разность времени приема ретранслированных сигналов τi,k в ЦППО и ППП, в противном случае после завершения текущего j-го МАС-фрейма анализируют преамбулу и заголовок очередного МАС-фрейма с целью поиска фрейма заданного пользователя.
2. Устройство определения координат источника радиоизлучения (ИРИ) разностно-дальномерным способом, содержащее k периферийных пунктов приема (ППП) и центральный пункт приема и обработки (ЦППО), причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, k+1 трактов приема радиосигналов и центральный пост обработки (ЦПО) из последовательно соединенных блока измерения задержки Δτi,k и блока вычисления координат, выход которого является выходом ЦПО и выходной шиной ЦППО, причем k+1 входы ЦПО соединены с выходами соответствующих трактов приема сигналов, первая входная шина ЦППО является входом управления радиопередатчика и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки ƒн трактов приема радиосигналов, отличающееся тем, что в центральный пост обработки дополнительно введены k+1 аналогово-цифровых преобразователей, входы которых являются соответственно k+1 входами ЦПО, k+1 блоков памяти, группы информационных входов которых соединены с выходами соответствующих аналого-цифровых преобразователей, группа из k+1 входов блока измерения задержки τi,k соединена с информационными выходами соответствующих k+1 блоков памяти, блок управления, предназначенный для задания длительности интервала анализа Δt и его начала t', и тракт анализа, предназначенный для определения начала очередного фрейма t*, его длительности Δtj, вида модуляции МАС-фрейма и его демодуляции, определения адреса текущего пользователя Aj, второй вход которого является вторым установочным входом ЦПО и третьей входной шиной ЦППО, предназначенной для задания адреса пользователя Aj, первый информационный вход тракта анализа соединен с выходом k+1-го аналого-цифрового преобразователя, а выход объединен с первыми входами управления k+1 блоков памяти и вторым входом блока управления, первый вход которого является первым установочным входом ЦПО и второй входной шиной ЦППО, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти и третьим входом тракта анализа, четвертая входная шина ЦППО, предназначена для задания координат ППП и ЦППО {X, Y}k+1, соединена со вторым входом блока расчета координат ЦПО и является третьим установочным входом ЦПО, генератор тактовых импульсов, выход которого соединен с входами синхронизации k+1 аналого-цифровых преобразователей, блока управления, тракта анализа, блока измерения задержки Δτi,k и блока вычисления координат.
3. Устройство по п. 2, отличающееся тем, что тракт анализа содержит последовательно соединенные демодулятор DBPSK сигналов, блок поиска и анализа заголовка PLCP, предназначенный для определения начала фрейма t*, типа модуляции МАС-фрейма и его длительности Δtj, демодулятор DQPSK сигналов, блок анализа МАС-фрейма, предназначенный для определения адреса пользователя текущего фрейма Aj и его сравнение с заданным Азад, и блок задания интервала измерений Δtизм, предназначенный для задания временных границ начала фрейма t* и его конца t1, выход которого является выходом тракта анализа, а информационный вход соединен с третьим выходом блока поиска и анализа заголовка PLCP, второй выход которого соединен со вторым входом блока анализа МАС-фрейма, третий вход которого является вторым входом тракта анализа, а вход демодулятора DBPSK является первым входом тракта анализа, третий вход которого соединен со входом управления демодулятора DBPSK сигналов, а вход синхронизации тракта анализа объединен со входами синхронизации блока задания интервала измерения Δtизм, демодулятора DBPSK сигналов, блока поиска и анализа заголовка PLCP, демодулятора DQPSK сигналов и блока анализа МАС-фрейма.
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ MSK СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2016 |
|
RU2623094C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2521084C1 |
| СПОСОБ ОЦЕНКИ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ ПАССИВНОЙ РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМОЙ | 2008 |
|
RU2367972C1 |
| JP 2009300284 A, 24.12.2009 | |||
| JP 8036040 A, 06.02.1996 | |||
| WO 2010072593 A1, 01.07.2010 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 9702960 B2, 11.07.2017. | |||

